
Холостой ход электродвигателя | Полезные статьи
Электродвигатель переходит в режим холостого хода, когда с его вала снимают рабочую нагрузку. В этом случае можно определить такие важные параметры функционирования устройства, как намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода. Но главное – в режиме холостого хода можно определить исправность устройства.
Так, электродвигатель на холостом ходу греться не должен. Но в некоторых случаях температура привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
Параметры холостого хода электродвигателя
Как было сказано выше, холостой ход – это режим работы асинхронного электродвигателя, при котором на валу нет нагрузки. В этом случае устройство с точки зрения электротехники схоже с трансформатором. Но главное – оно потребляет меньше электроэнергии, что особенно важно для контроля правильности работы мотора.
В частности, ток холостого хода асинхронного электродвигателя в зависимости от мощности и частоты вращения составляет в среднем 20-90% от номинального. Существует таблица, в которой указаны данные значения.

Так, например, ток холостого хода электродвигателя на 5 кВт при частоте вращения в 1000 оборотов в минуту составляет 70% от номинального (см. рис. 2). При частоте вращения 3000 оборотов в минуту – всего 45% от номинального (см. рис. 3). Это важно учесть, так как если фактическая сила тока значительно расходится с расчётной, то это сигнализирует о неполадках.


Стоит отметить, что параметры работы двигателя обычно указаны в прилагаемой к нему документации или могут быть получены посредством расчётов.
Что делать, если греется электродвигатель на холостом ходу
Электродвигатель на холостом ходу греться не должен. Допускается лишь незначительное увеличение температуры, обусловленное естественными причинами – появление трения в подшипниках на валу ротора и сопротивление в обмотке. А вот заметный нагрев сигнализирует в первую очередь о неполадках в устройстве.
Чаще всего нагревается асинхронный электродвигатель на холостом ходу из-за межвиткового замыкания в обмотках. Это требует срочного ремонта. Ведь при повышении нагрузок межвитковое замыкание может привести к перегреву и выгоранию обмотки – и, как следствие, повреждению как самого ЭД, так и конструкции, в которую он установлен.
Ещё одна возможная причина нагрева ЭД в этом режиме – эксплуатация в нештатных условиях. Например, превышение напряжения. В этом случае необходимо срочно отключить питание двигателя, так как из-за перегрева может возникнуть межвитковое замыкание в обмотках или замыкание обмотки на корпус двигателя.
Реже нагрев ЭД наблюдается из-за затруднённого движения ротора. Стоит убедиться, что подшипники работают нормально, а между обмотками ротора и статора не попали загрязнения.
Холостой ход электродвигателя
Коэффициент мощности при холостом ходе электродвигателя
- Режим холостого хода в асинхронном электродвигателе возникает в момент отсутствия нагрузки в форме редуктора или рабочего момента. При этом режим s=0 недостижим даже при условии, что трение в подшипниках не создаст момент нагрузки. Но если поле статора не пересекает непосредственно поле обмотки ротора и не индуцирует в нем ток, значит, не создается электромагнитное поле ротора.
- Как правило, коэффициент мощности асинхронного электродвигателя в режиме холостого хода не превышает предельно допустимых параметров, равных 0,2. Если увеличить нагрузку на вал электродвигателя, коэффициент мощности возрастет и достигнет наибольшего значения. Такой коэффициент создается при номинальной нагрузке.
- Дальнейшее же увеличение нагрузки приводит к индуктивному сопротивлению ротора, так как увеличивается скольжение и как следствие – частота тока в роторе. Чтобы увеличить коэффициент мощности, следует обеспечить электродвигателю нагрузку, параметры которой наиболее близки к номинальным значениям. Следовательно – необходимо правильно выбрать мощность самого электродвигателя.
- При систематической работе недогруженного электродвигателя подводимое к мотору напряжение пропорционально уменьшают. Сделать это вполне реально, переключив обмотку статора с треугольника на звезду. Такой способ подключения поможет уменьшить фазное напряжение в один раз. Активная же составляющая тока статора пропорционально увеличится. Коэффициент мощности также будет увеличен.
Почему так важно при покупке электродвигателя получить профессиональную рекомендацию специалиста
Неправильно выбранная мощность электродвигателя не позволит решить все поставленные задачи. При неполной загруженности электромотора вы будете иметь дополнительные расходы на его техническое обслуживание и ремонт. При недостатке мощности электродвигатель быстро выйдет из строя.
При покупке электродвигателя в нашей компании Вы получите профессиональную рекомендацию специалиста по подбору электродвигателя нужной модели и нужной мощности.
Просмотров: 9949
Дата: Воскресенье, 15 Декабрь 2013
12. Холостой ход асинхронного двигателя
Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s=0,01-0,08. В режиме идеального холостого хода
13. Приведение вторичной обмотки трансформатора к первичной
Для упрощения анализа и расчета режимов работы трансформатора пользуются способом, при котором одна из его обмоток приводится к другой. Смысл приведения состоит в том, чтобы сделать ЭДС первичной и вторичной обмоток одинаковыми, электромагнитную связь между обмотками заменить электрической связью и получить единую электрическую

т.е. увеличивают число ее витков в k раз. Таким образом, коэффициент приведения вторичной обмотки к первичной равен коэффициенту трансформации. Все параметры приведенной обмотки обозначают со штрихами:

и т.д. В приведенной обмотке в соответствии с новым числом витков увеличиваются все ЭДС, напряжения и падения напряжения, т.е.:

Важным условием приведения является то, чтобы мощности и потери энергии во вторичной обмотке не изменялись. Для этого должны выполняться равенства:

из которых получаются соотношения для тока и активного сопротивления приведенной вторичной обмотки:

Аналогично последнему соотношению изменяются индуктивное сопротивление рассеяния приведенной вторичной обмотки и параметры нагрузки:

Для полных сопротивлений справедливы соотношения:

Если таким образом изменить (условно конечно) все электрические величины вторичной обмотки, то энергетические соотношения в реальном и приведенном трансформаторе сохраняются без изменений и поэтому приведение правомерно. При этом необходимо помнить, что приведение — это чисто аналитический прием, позволяющий упростить расчеты и анализ физических процессов в реальном трансформаторе.
14. Основные уравнения и векторная диаграмма трансформатора Векторная диаграмма трансформатора
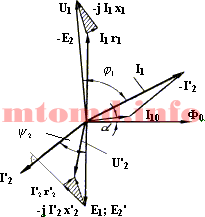
Воспользуемся вторым основным уравнением и произведем сложение векторов:

Для
этого к концу вектора E2‘
пристроим вектор — j I2‘
x2‘,
а к его концу — вектор — I2‘
r2‘.
Результирующим вектором U

из которого видно, что вектор тока I1 состоит из геометрической суммы векторов I10 и — I2‘. Произведем это суммирование и достроим векторную диаграмму трансформатора. Теперь вернемся к первому основному уравнению:

Чтобы построить вектор — Е1 , нужно взять вектор +Е1 и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1 x1 и I1 r1. Первый будет идти перпендикулярно току, а второй — параллельно ему. В результате получим суммарный вектор u1.
Построенная векторная диаграмма трансформатора имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.

Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
M = cмФтI2 cos?2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Холостой ход
Холостой ход. Режим холостого хода. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
2. Допустимые значения тока холостого хода двигателей
Предельно допустимые значения тока холостого хода для трехфазных асинхронных двигателей
Мощность электродвигателя, | Ток холостого хода, % (от Iном.), | |||||
при частоте вращения, об./мин. | ||||||
3000 | 1500 | 1000 | 750 | 600 | 500 | |
0,12 — 0,55 0,75 — 1,5 1,5 — 5,5 5,5 — 11 15 — 22,5 22,5 — 55 55 — 110 | 60 50 45 40 30 20 20 | 75 70 65 60 55 50 40 | 85 75 70 65 60 55 45 | 90 80 75 70 65 60 50 | 95 85 80 75 70 65 55 | — 90 85 80 75 70 60 |
Примечание: Перед измерением тока электродвигатели должны быть обкатаны, т. е. проработать без нагрузки в течение 0,5-1 часа при мощности до 100 кВт и не менее 2 часов при мощности выше 100 кВт.
*Данные в таблице являются справочными и могут отличаться при реальных измерениях на + 10-20%.
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Таблица : средние значения силы тока холостого хода в % от номинального тока электродвигателя = электромотора в зависимости от мощности и частоты вращения Поделиться:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||