Базовая комплектация асинхронного двигателя — Русские Блоги
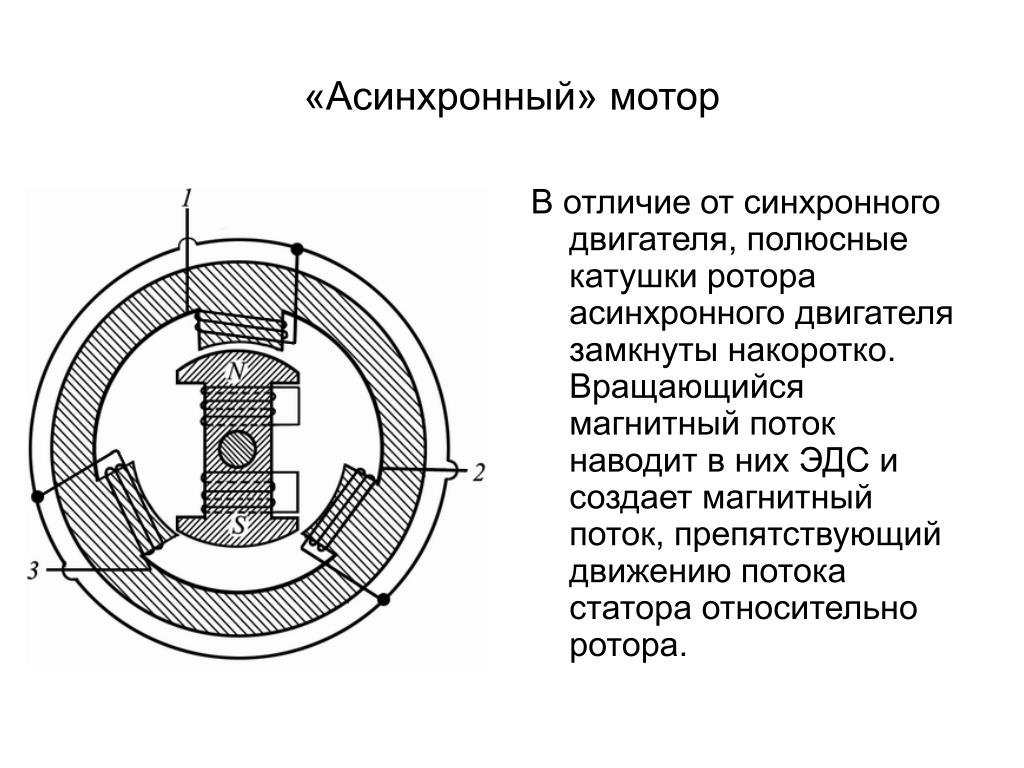
1 Что такое статор в асинхронном двигателе с короткозамкнутым ротором? Что такое ротор?
Статор: Проволочная обмотка, намотанная в корпусе асинхронного двигателя с короткозамкнутым ротором, является обмоткой статора. Поскольку она не вращается, она называется статором. Структура статора также разделена на три фазы, которые распределены в пространстве с интервалами в 120 °. Трехфазный симметричный переменный ток вводится в двигатель во время работы. Этот переменный ток создает вращающуюся магнитодвижущую силу в обмотках статора.
Ротор: ротор асинхронного двигателя с короткозамкнутым ротором представляет собой интегрированный проводник, состоящий из концевых колец и направляющих стержней, а его внутренняя цепь имеет короткое замыкание. Ротор вращается во время работы двигателя, поэтому его называют ротором.
2 Что такое магнитодвижущая сила вращения?
Сначала посмотрим на определение магнитодвижущей силы: потенциальное значение магнитного потока, создаваемого током, протекающим через проводник.
Вращающаяся магнитодвижущая сила, отсюда следует из названия, представляет собой значение силы вращающегося магнитного потока. Когда симметричный трехфазный переменный ток подается в трехфазную обмотку статора асинхронного двигателя, создается вращающаяся магнитодвижущая сила.
Дополнение: Правило правой руки: ток в проводе под напряжением будет генерировать магнитное поле.Направление большого пальца — это направление тока, а направление магнитного поля — это направление, окруженное четырьмя пальцами.
При включении и замыкании катушки создается магнитное поле: направление четырех пальцев — это направление тока, а направление магнитного поля — направление большого пальца.
3 Как вращается ротор? Откуда сила?
Предположим, что в определенный момент обмотки статора запитаны трехфазным переменным током, а вращающая магнитодвижущая сила уже существует в воздушном зазоре. Когда вращающая магнитодвижущая сила действует на ротор с короткозамкнутым ротором, в роторе создается наведенная электродвижущая сила из-за электромагнитной индукции. Из-за наличия концевого кольца внутренняя часть ротора закорачивается, создавая индуцированный ток в роторе. Согласно закону Ампера, проводник под напряжением будет подвергаться силе в магнитном поле.(F=BILcosa), Направление силы соответствует правилу левой руки.
Из-за наличия концевого кольца внутренняя часть ротора закорачивается, создавая индуцированный ток в роторе. Согласно закону Ампера, проводник под напряжением будет подвергаться силе в магнитном поле.(F=BILcosa), Направление силы соответствует правилу левой руки.
4 Почему он называется асинхронным двигателем? В чем разница между синхронным двигателем и асинхронным двигателем?
Прежде всего, определение асинхронного двигателя и синхронного двигателя основано на движении статора и ротора. Если скорость вращения магнитодвижущей силы статора и скорость вращения ротора синхронны, это синхронный двигатель, а соответствующий асинхронный двигатель является асинхронным. Физическая причина заключается в том, что магнитное поле возбуждения синхронного двигателя создается постоянными магнитами или обмотками возбуждения, а вращающаяся часть также является частью возбуждения. Например, магнитное поле возбуждения синхронного двигателя с постоянными магнитами создается постоянными магнитами, а ротор является частью, в которую встроены постоянные магниты.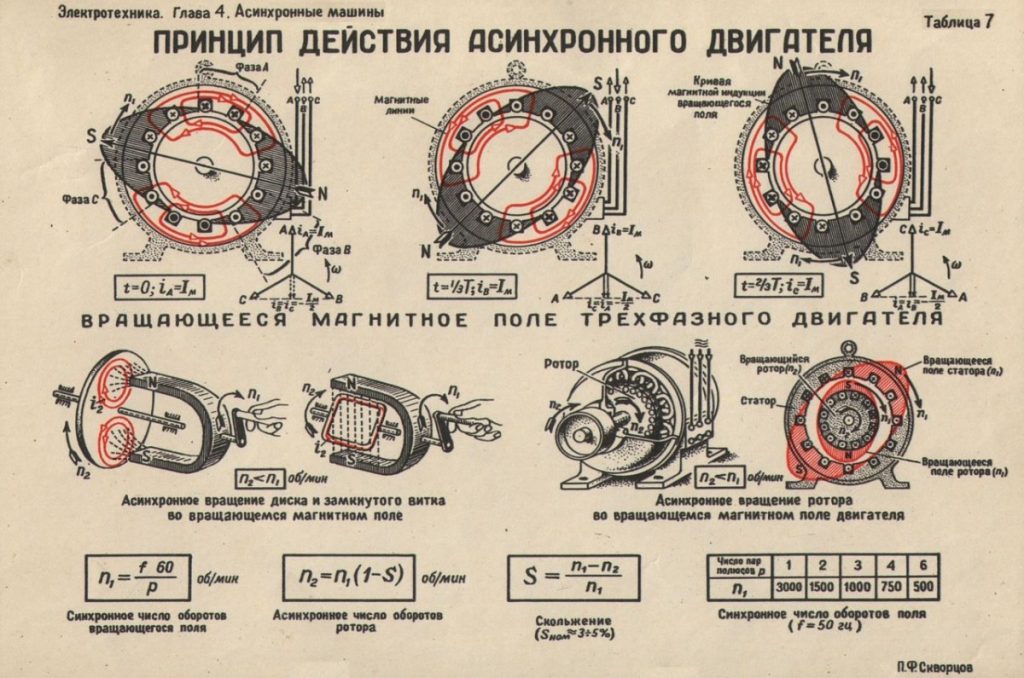 Конструкция; асинхронный двигатель — это явление рассечения магнитного поля, которое происходит через ротор, и статор не синхронизирован, так что индуцированный ток генерируется в роторе, и создается магнитное поле ротора, тем самым реализуя вращение ротора.
Конструкция; асинхронный двигатель — это явление рассечения магнитного поля, которое происходит через ротор, и статор не синхронизирован, так что индуцированный ток генерируется в роторе, и создается магнитное поле ротора, тем самым реализуя вращение ротора.
5 Будет ли в роторе индуцированная магнитодвижущая сила? Что такое реакция ротора или реакция якоря?
Индуцированный ток, генерируемый явлением электромагнитной индукции, также будет генерировать наведенную электродвижущую силу в роторе, которая является причиной реакции якоря.
В случае внешней нагрузки разница между скоростью ротора и скоростью вращения магнитодвижущей силы статора увеличивается, и индуцированный ток в роторе увеличивается, так что индуцированная электродвижущая сила, создаваемая якорем, увеличивается. Эта увеличенная наведенная магнитодвижущая сила влияет на магнетизм статора. Движущая сила вызывает турбулентность магнитодвижущей силы статора, в результате чего магнитодвижущая сила статора перестает быть симметричной, так что двигатель не может нормально вращаться.
В асинхронном двигателе, пока ток статора не изменяется, магнитный поток в воздушном зазоре не изменяется. Это связано с тем, что магнитодвижущая сила, создаваемая током нагрузки, и индуцированная магнитодвижущая сила, создаваемая магнитодвижущей силой в статоре, компенсируются, поэтому якорь отсутствует. Отклик, пока синхронный двигатель вращается синхронно, эта величина не может компенсировать друг друга.
6 Что такое поток в воздушном зазоре?
Прежде всего, что такое воздушный зазор? Воздушный зазор — это зазор между статором и ротором двигателя. Статор не вращается, ротор должен вращаться, поэтому воздушный зазор необходим, а размер воздушного зазора различается в зависимости от двигателя. Чем больше воздушный зазор, тем больше магнитное сопротивление.
Магнитный поток в воздушном зазоре — это магнитный поток, проходящий через воздушный зазор. В асинхронном двигателе он равен сумме потока статора и потока рассеяния. Если нет потока утечки, поток в воздушном зазоре, поток статора и поток ротора одинаковы.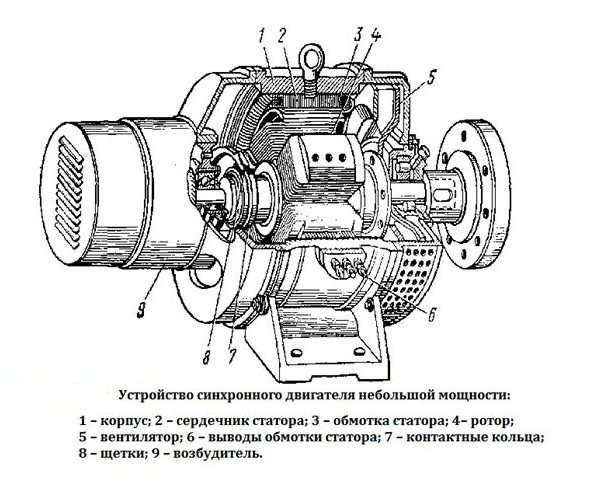
Магнитное поле воздушного зазораРоль заключается в передаче энергии. Воздушный зазор мотора как можно меньше. Потому что чем меньше,Магнитное поле воздушного зазораЧем короче цепь, тем меньше магнитное сопротивление. Точно так же, чем меньше воздушный зазор, тем больше сила цепочки магнитного поля. Только чем больше сила цепочки магнитного поля, тем больше кинетической энергии или электрической энергии от ротора и статора может быть поглощено, и тем ближе может быть передача к 100%. Роль энергии.
Коллекторный и бесколлекторный двигатели
В ассортименте продукции Greenworks есть инструменты с коллекторным (щёточным) и бесколлекторным (бесщёточным) двигателями. Но везде делается акцент только на бесколлекторном электродвигателе. Почему только на нём, и для чего тогда устройства с щёточным? Расскажем в данной статье преимущества и недостатки каждого электродвигателя и ответим на эти два вопроса.
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот.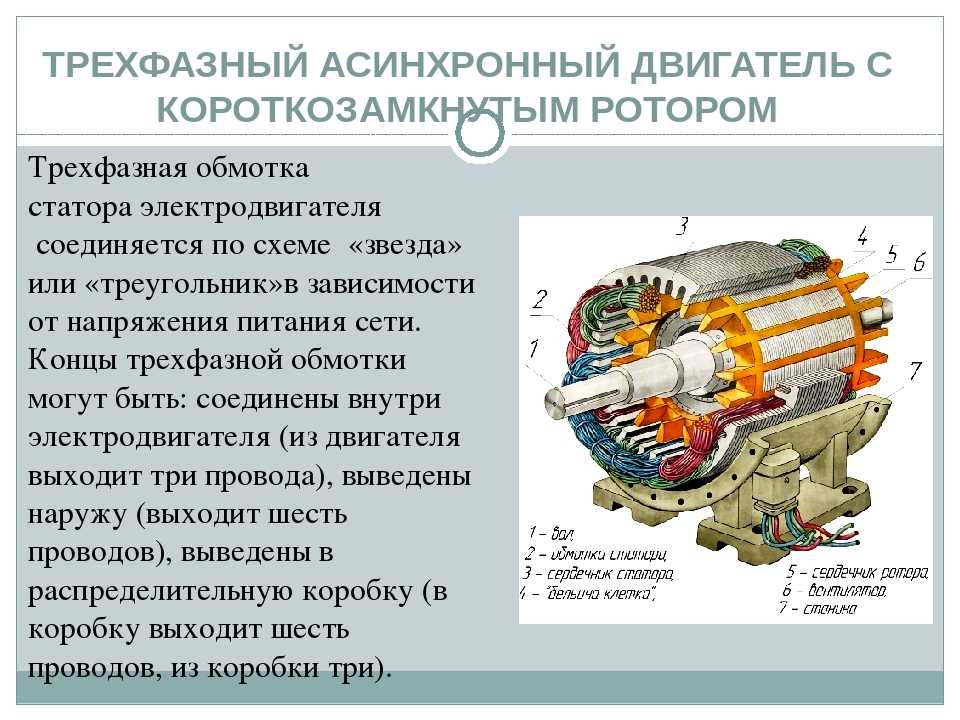 Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
Устройство коллекторного двигателя
Якорь. Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор. Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники. Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки. Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор). Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.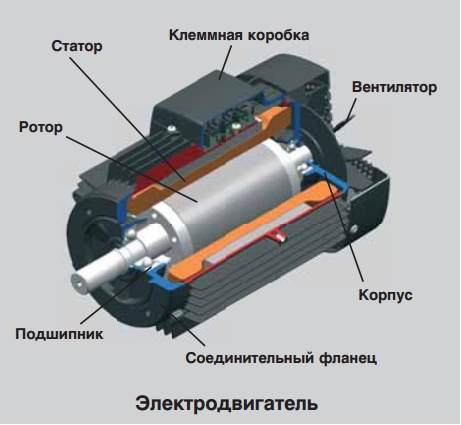
Обмотки. Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора. Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора. Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
Плюсы:
- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
Минусы:
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
-
Задымление инструмента.

- Выход из строя инструмента раньше его «жизненного цикла».
Если рассматривать бытовую сферу применения, то коллекторный двигатель является традиционным и бюджетным вариантом эксплуатации (и самым часто используемым).
Бесколлекторный двигатель
Если в коллекторном двигателе всё приходит в действие за счёт механики, то в бесщёточном — чистая электроника. Также позиции некоторых элементов в конструкции меняются местами.
Основные типы бесщёточного двигателя :
- Асинхронный — это двигатель, который преобразовывает электроэнергию переменного тока в механическую. Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks).
- Синхронный — это двигатель переменного тока, у которого частота вращений ротора равна частоте вращений магнитного поля.

Тип двигателя с внешним ротором
Расположение ротора и статора в бесщёточном двигателе DigiPro
Плюсы:
- Из-за отсутствия щёток меньше трения.
- Меньше подвержены износу.
- Отсутствие искр и возможного возгорания.
- Упрощенная регулировка крутящего момента в больших пределах.
- Экономия расходуемой энергии.
- У инструментов с реверсом одинаковая мощность в обоих направлениях вращения.
- Быстрый запуск с больших скоростей.
- Могут разгоняться до предельных показателей.
- Некоторые модели при сильной нагрузке оснащены системой защиты двигателя.
Минусы:
- Значительно дороже в цене, чем коллекторные двигатели.
- Техническое обслуживание более узкоспециализированное.
Несомненно бесколлекторные двигатели ориентированы на профессиональные работы с приличной нагрузкой. Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен. Уже исходя из ответа делать свой выбор.
Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен. Уже исходя из ответа делать свой выбор.
Сколько людей — столько и мнений. Компания Greenworks старается делать качественную продукцию на разных типах двигателя, чтобы каждый мог подобрать себе инструмент по предпочтениям, функционалу и необходимой мощности под конкретные задачи, которые у каждого клиента свои. Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Вернуться к списку
Асинхронный и синхронный электродвигатели. Принцип работы
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
.
Скорость асинхронного двигателя в рабочих режимах
,
| Рис. 4.1. Схема включения асинхронных двигателей с КЗР (а) и ФР (б) |
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой .
| Рис. 4.2. Схема включения СД |
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
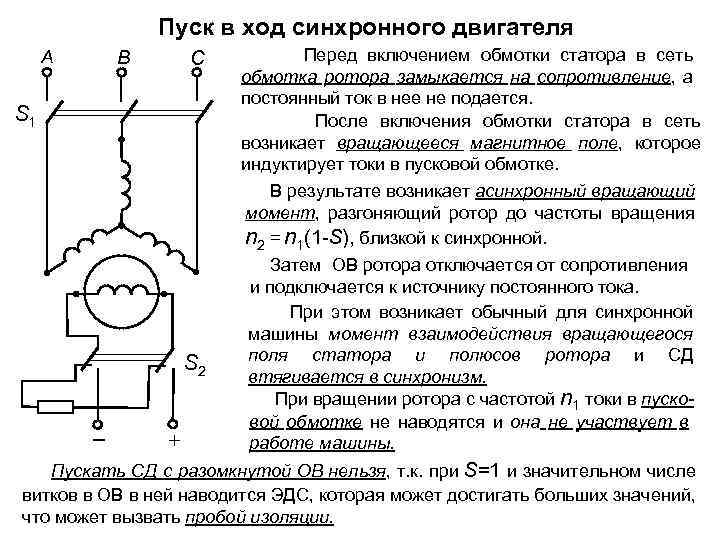
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц — СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др. ).
).
Синхронные двигатели имеют перегрузочную способность .
Еще одной особенностью СД является возможность работать с величиной , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
Механические характеристики синхронного двигателя представлены на рис. 4.3 (прямая 1).
Для синхронных двигателей важное значение имеет угловая характеристика, то есть зависимость момента синхронной машины от угла . Угол — это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при является неустойчивым.
| Рис. 4.3. Механические характеристики асинхронного и синхронного двигателей | Рис.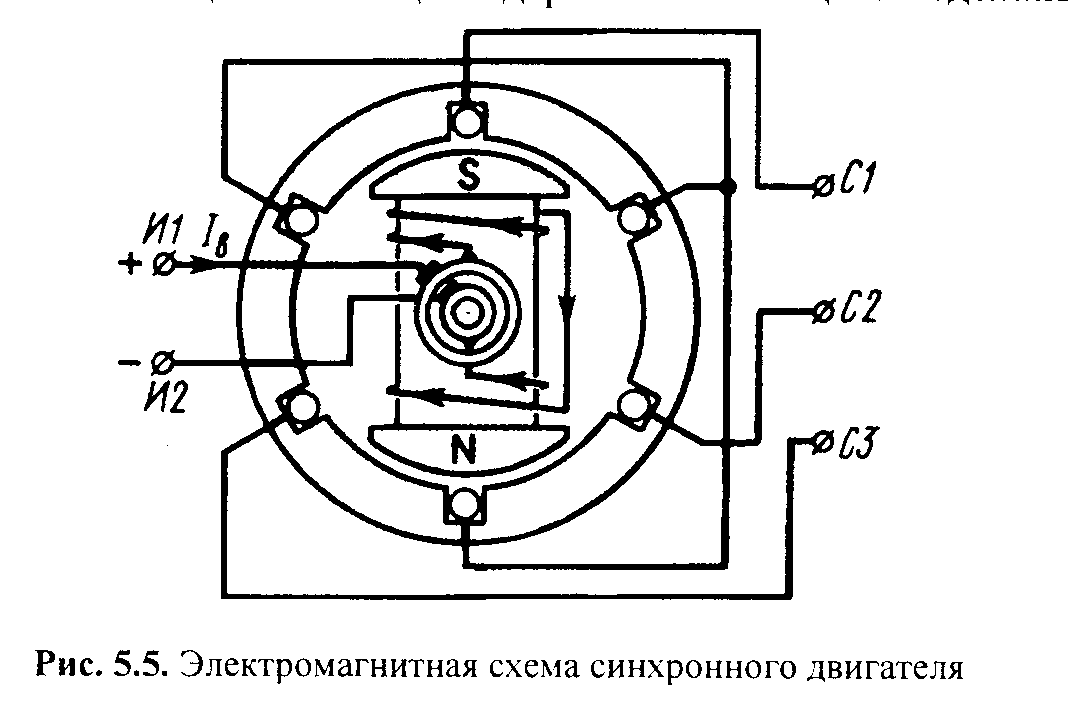 4.4. Угловая характеристика СД 4.4. Угловая характеристика СД
|
Дата добавления: 2017-11-21; просмотров: 1570; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Синхронные электродвигатели постоянного тока. Электродвигатели: какие они бывают
Главная » Электродвигатели » Синхронные электродвигатели постоянного тока. Электродвигатели: какие они бывают
Электрический двигатель – так называют электрическую машину (электромеханический преобразователь энергии), в которой энергия электричества преобразуется в механическую. При этом выделяется тепло.
Принцип действия
Рабочая схема электродвигателя очень проста. В основе функционирования электрической машины существует принцип электромагнитной индукции. Электрический механизм состоит из статора (неподвижного), который устанавливается в синхронных или асинхронных машинах переменного тока или индуктора (электродвигатели постоянного тока) и ротора (подвижной части, устанавливаемого в синхронных или асинхронных машинах переменного тока) или якоря (в машине тока постоянного). В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
Роторы бывают:
Короткозамкнутые
Фазные (имеющие обмотку). Применяются в случае уменьшения пускового тока и для регуляции частоты вращения асинхронного электродвигателя.
В основном, представлены крановым электродвигателем серии МТКН (который по большей части применяется в крановых установках).
Якорем называют подвижную часть машины постоянного тока (генератора или двигателя) или же функционирующего по данному принципу универсального двигателя (который часто встречается в электрических инструментах). Универсальным двигателем называют ДПТ (двигатель постоянного тока), который имеет последовательное возбуждение (когда обмотки индуктора и якоря
включены последовательно). Различие только в расчете обмоток. На постоянном токе нет реактивного (емкостного или индуктивного) сопротивления. Именно поэтому любая болгарка, если вынуть электронный блок, будет в рабочем состоянии, особенно на постоянном токе и при меньшем сетевом напряжении.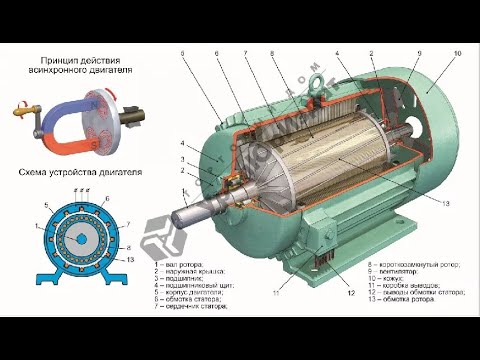
Принцип функционирования асинхронного трехфазного электродвигателя
При включении питания в статоре возникает вращающееся круговое магнитное поле. Оно пронизывает короткозамкнутую обмотку ротора и появляется ток индукции. Согласно закону Ампера (на проводник, находящийся под током, помещенный при этом в магнитное поле, действует ЭДС сила), ротор начинает вращаться.
Частота его вращения зависит от частоты напряжения, а также от числа пар полюсов магнитов. Разность между частотой вращения ротора и частотой вращения поля магнитного статора характеризуется скольжением. Электродвигатель асинхронный называется асинхронным, потому что частота вращения поля магнитного статора не совпадает с частотой ротора.
Синхронный двигатель отличается от него конструкцией ротора. Ротор в подобном двигателе выполнен либо электромагнитом, либо постоянным магнитом. Также может иметь в себе частичку беличьей клетки (для запуска). В роторе непременно содержатся электромагниты или постоянные магниты.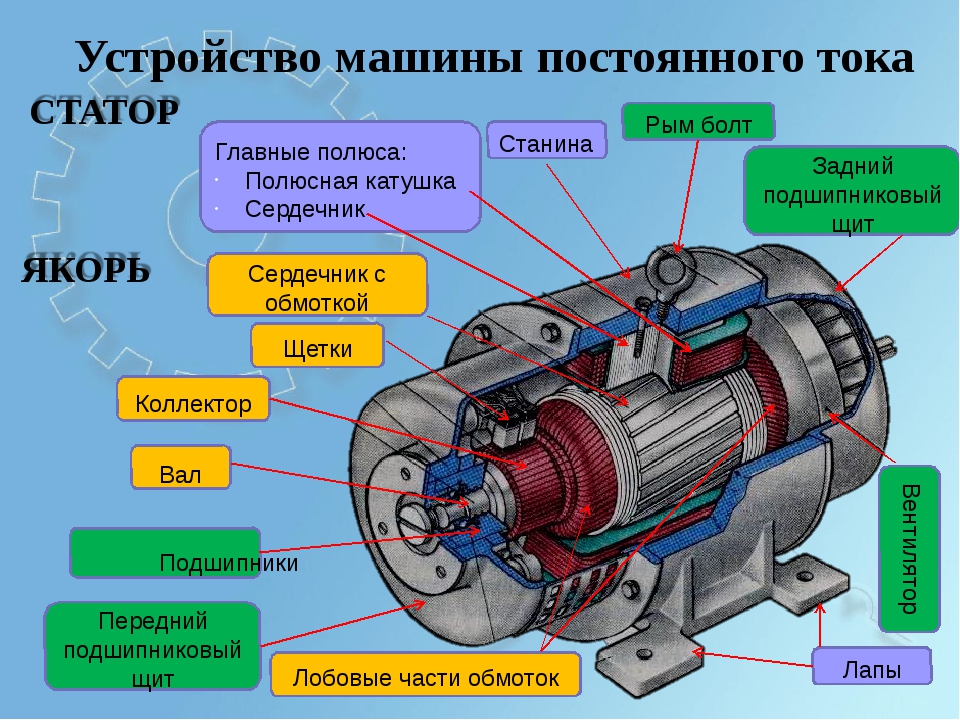 Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Асинхронные двигатели широко применяются во многих отраслях техники. Это особенно характерно для обычных по конструкции и трехфазных прочных асинхронных двигателей, которые имеют коротко-замкнутые роторы. Такие двигатели дешевле и надежнее обычных электрических двигателей и не нуждаются в особом уходе. Название «асинхронный» указывает на то, что в подобном двигателе ротор вращается с вращающимся полем статора не синхронно. В отсутствие трехфазной сети асинхронный двигатель включают в сеть однофазного тока.
Устройство статора асинхронного электродвигателя очень простое. Он состоит из пакета лакированных листов стали электротехнической толщиной 0,5 мм. В пазах пакета, такого же, как в синхронной машине, уложена обмотка. Статор трехфазного асинхронного двигателя имеет три фазы обмотки. Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Схема двухполюсной машины
Схема двухполюсной машины выглядит очень просто. В машине содержатся четыре паза из расчета на каждую фазу. При поступлении питания на обмотки статора от трехфазной сети получается особое вращающееся поле. Это получается потому, что токи в фазах обмотки смещены в пространстве на 120° относительно друг друга и сдвинуты по фазе на 120°. При синхронной частоте вращения nc поля электродвигателя с р парами полюсов верно при частоте токов в f: nc=f/p. Так, при частоте 50 Гц получается для р = 1, 2, 3 (двух-, четырех или шести машин полюсных) получаются синхронные частоты вращения в nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя состоит из листов электротехнической стали. Он может выполняться в виде ротора с контактными кольцами (фазный ротор) или короткозамкнутого ротора (с беличьей клеткой). В короткозамкнутом роторе обмотка выглядит в виде стержней из металла (бронзы, меди или алюминия). Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами. Соединение стержней осуществляет при помощи пайки сваркой или твердым припоем. При использовании сплавов из алюминия или алюминия стержни ротора, а также закорачивающие кольца и лопасти вентилятора, располагающиеся на них, производят при помощи литья под давлением.
Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами. Соединение стержней осуществляет при помощи пайки сваркой или твердым припоем. При использовании сплавов из алюминия или алюминия стержни ротора, а также закорачивающие кольца и лопасти вентилятора, располагающиеся на них, производят при помощи литья под давлением.
Прямо у ротора электрического двигателя с контактными кольцами в пазах располагается трехфазная обмотка. По внешнему виду она походит на обмотку статора, включенную звездой. Начала фаз данной обмотки соединены с тремя контактными кольцами, которые закреплены на валу. В процессе запуска двигателя можно выполнить регулировку частоты вращения. Для этого подсоединяют к фазам обмотки ротора реостаты (делается это через щетки и контактные кольца). После успешного разбега кольца контактов замыкаются накоротко. Это значит, что обмотка двигателя ротора выполняет те же самые функции, что и обмотка короткозамкнутого ротора.
Классификация электрических двигателей
По природе возникновения вращающего момента электрические двигатели делятся на магнитоэлектрические и гистерезисные. У гистерезисных двигателей вращающийся момент создается за счет гистерезиса при перемагничивании ротора. Подобные устройства считаются нетрадиционными и мало распространены в промышленности.
Самым распространенным товаром считаются магнитоэлектрические двигатели. По типу потребляемой энергии они подразделяются на две группы – двигатели тока постоянного и двигатели тока переменного. Также существуют так называемые двигатели универсальные, которые питаются обоими видами токов.
Двигатель постоянного тока
Двигателем постоянного тока называют электродвигатель, чье питание происходит за счет постоянного тока. Данный тип двигателей также принято подразделять по наличию щёточно-коллекторного узла на две группы:
Бесколлекторные
Коллекторные
Щёточно-коллекторный узел отвечает за качественное электрическое соединение цепей неподвижной и вращающейся части машины. Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Коллекторные двигатели по типу возбуждения подразделяются на:
Двигатель с самовозбуждением
Двигатель с независимым возбуждением (от постоянных магнитов и электрических магнитов).
Двигатель с самовозбуждением подразделяется на:
Двигатель, имеющий параллельное возбуждение (обмотка якоря в этом случае включается строго параллельно обмотке возбуждения)
Двигатель, имеющий последовательное возбуждение (обмотка якоря в данном случае якоря включается строго последовательно обмотке возбуждения)
Двигатель, имеющий смешанное возбуждение (обмотка возбуждения в данном случае включается последовательно частично и параллельно частично обмотке якоря).
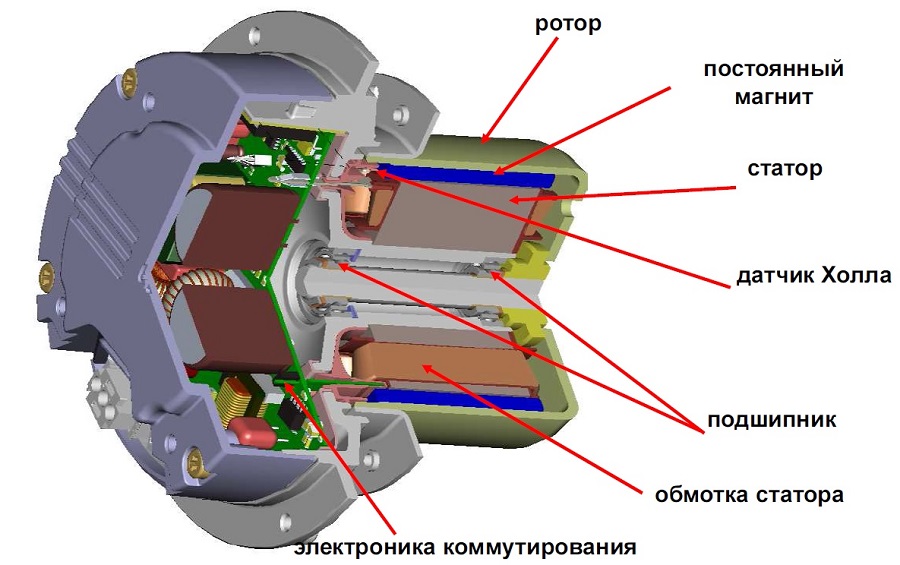
Вентильные двигатели (бесколлекторные) – это электрические двигатели, которые выполняются в виде замкнутой системы с применением датчика, определяющего положение ротора, преобразователя координат (системы управления), а также инвертора (силового полупроводникового преобразователя).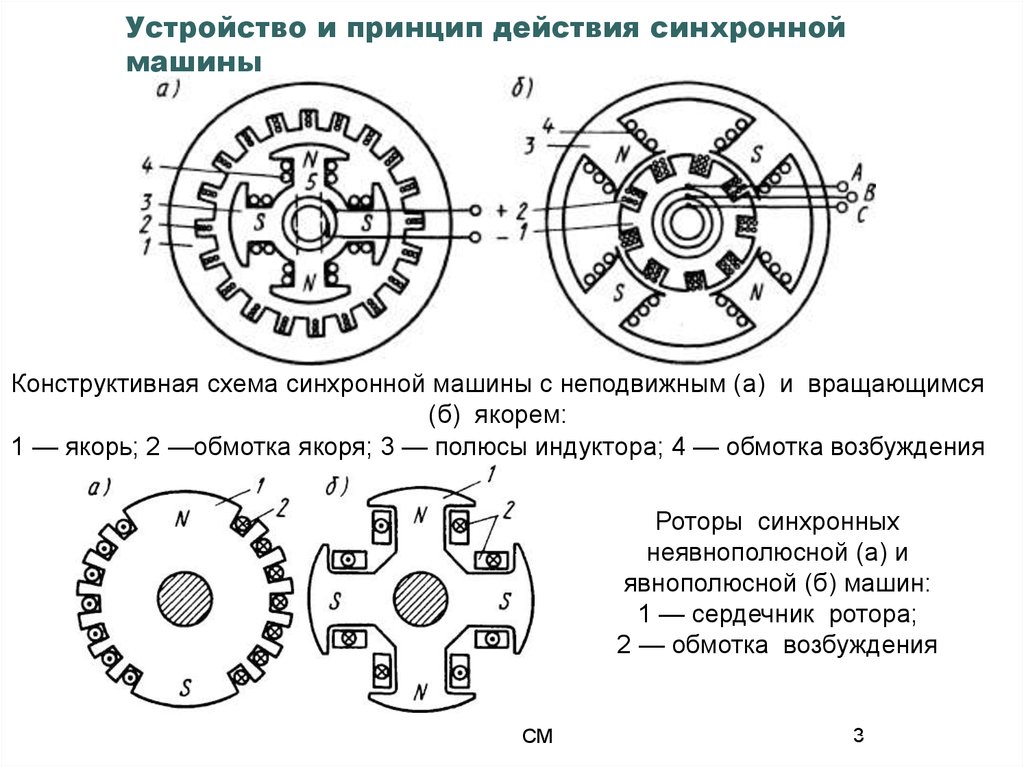 Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Двигатель переменного тока
Трехфазный асинхронный двигатель
Электродвигатели переменного тока — это электрические двигатели, питание которых осуществляется при помощи переменного тока. По принципу функционирования подобные двигатели подразделяются на асинхронные и синхронные двигатели. Принципиальное отличие заключается в том, что в синхронном двигателе первая гармоника силы магнитодвижущей статора перемещается со скоростью вращения ротора. Сам ротор перемещается со скоростью перемещения магнитного поля в статоре. У асихронного двигателя всегда присутствует разница между скоростью перемещения ротора и скоростью магнитных полей в статоре (ротор вращается медленнее поля).
Синхронный электродвигатель — это электрический двигатель тока переменного. Ротор синхронно вращается с полем магнитным питающего напряжения. Подобные устройства применяются для обеспечения больших мощностей (более сотни киловатт). Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Асинхронный электродвигатель — это электрический двигатель переменного тока. Частота вращения ротора в данном двигателе существенно отличается от вращения полей магнита, которые создаются от питающего напряжения. Подобные устройства наиболее распространены.
По количеству фаз двигатель тока переменного принято подразделять на:
Однофазные электродвигатели. Запуск подобных устройств производится вручную. Они могут иметь пусковую обмотку или фазосдвигающую цепь.
Двухфазный (сюда входят и конденсаторные)
Электродвигатель трехфазный
Многофазный
Коллекторный универсальный электродвигатель – это электрический коллекторный двигатель, который может функционировать как на переменном, так и на постоянном токе. Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Двигатель переменного тока, питающийся от промышленной сети 50 ГЦ, не может обеспечить частоту вращения более 3000 об/мин. Именно поэтому для получения высочайших частот следует использовать коллекторный электродвигатель. Такой двигатель получается меньше и легче, в сравнении с двигателем тока переменного такой же мощности. Также применяются особые передаточные механизмы, которые позволяют изменять кинематические параметры механизмов до нужных вам (так называемые мультипликаторы). При использовании преобразователей частоты или сети частоты повышенной (в 100, 200 или 400 Гц) двигатель переменного тока оказывается меньше и легче, в сравнении с коллекторным двигателем (поскольку иногда коллекторный узел занимает ½ объема). Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Синхронный двигатель, имеющий датчик положения ротора и инвертор, считается электронным аналогом обычного коллекторного постоянного тока. Коллекторный универсальный двигатель считается электродвигателем коллекторным постоянного тока, имеющим последовательно включенные обмотки статора (возбуждения). Подключение электродвигателя такого типа не вызывает сложностей. Он также оптимизирован для функционирования на переменном токе электрической бытовой сети. Подобный тип двигателя вне зависимости от полярности поданного напряжения вращается строго в одну сторону. Это происходит потому, что обмотки ротора и статора соединены последовательно и смена полюсов полей магнитных данных устройств происходит одновременно, а значит, результирующий момент направлен в одну сторону. Если необходима работа на переменном токе, применяют статор из мягкого магнитного материала, имеющий малый гистерезис (малое сопротивление перемагничиванию).
Если необходимо уменьшение потерь на вихревые токи, берут наборный статор, изготовленный из изолированных пластин. Достоинством функционирования подобного двигателя считается то, что в режиме пуска и перегрузки индуктивное сопротивление обмоток ограничивает ток и максимальный момент двигателя до 5 – 3 от номинального.
Принцип его функционирования прост. Подвижная часть выполняется в виде магнитов, которые крепятся на штоке. Переменный ток электродвигателя проходит через неподвижные обмотки. Под действием этого процесса постоянные магниты перемещают шток.
Лось Анастасия
Специально для Двигатель.инфо
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбу ждения)
- Двигатели смешанного возбуждения. (обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатели переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
двухфазные — в том числе конденсаторные;
трёхфазные;
многофазные;
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства).
Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
И переменного , и постоянного тока до сих пор используются на производстве и в быту , они совершенствуются , разрабатываются новые модели . Отсюда следует вывод , что от постоянного тока отказались не полностью .
Изобретение
двигателей
переменного
тока
не
следует
списывать
на
одного
человека
, как это делается
сейчас
, многие
уверенны
, что все, что касается
переменного
тока
, а заодно
и сам ток, изобрел
один
лишь
Никола
Тесла
. Но
это не
так: несколько
крупных
ученых
разработали
и изготовили
свою
модель
двигателя
. Например
, одним
из
первых
изобретателей
был Чарльз
Уитстон
в 40-х годах
XIX
века
, а в 1889 году
русский
ученый
М.О. Доливо-Добровольский
изобрел
трехфазный
двигатель
, который
по
своим
характеристикам
превосходит
изобретение
Теслы
. Фактически
, двигатели
по
этому
принципу
изготавливаются
до
наших
дней
.
Фактически
, двигатели
по
этому
принципу
изготавливаются
до
наших
дней
.
Основное отличие конструкции двигателей :
Переменного тока — обмотка на статоре , между ним и ротором воздушный зазор (его величина тоже несет в себе дополнительные свойства ).
Постоянного тока — обмотка на ротора (он называется якорь, он вращается).
По способу возбуждения они подразделяются на двигатели независимого параллельного, последовательного и смешанного возбуждения.
Сейчас моторы переменного тока нашли широчайшее применение в быту, промышленности, сельском хозяйстве, также они активно эксплуатируются на электростанциях. Они получили распространение, благодаря простой технологичной конструкции, высоким энергетическим показателям, надежности и стабильности работы.
Двигатели переменного тока бывают однофазные и трехфазные.
Первый — однофазный — не имеет начального пускового момента и поэтому часто используется бытовых приборах, он вращается в ту сторону, в которую направляет внешняя сила. Кроме того, его мощность несколько меньше чем у трехфазных.
Кроме того, его мощность несколько меньше чем у трехфазных.
Обмотка его статора расположена в пазах и занимает примерно 2/3. Если этому типу все-таки требуется пусковой момент, то двигатель снабжают дополнительной обмоткой (из провода меньшего сечения), сдвинутой на 90 градусов относительно рабочей.
Трехфазные асинхронные двигатели подразделяются на два основных типа: с короткозамкнутым ротором и с фазным ротором (их еще называют «с контактными кольцами»). Статор у них одинаковый.
Асинхронные с короткозамкнутым ротором являются наиболее распространенными. На статоре — трехфазная обмотка, обмотка ротора — короткозамкнутая в виде «беличьей клетки», они размещаются в пазах, расположенных на внешней поверхности — у статора, и на внутренней — у ротора, простейший элемент обмотки — виток, состоящий из двух или нескольких параллельных проводников, которые размещены в пазах и расположены друг от друга на некотором расстоянии. Это расстояние называют шагом обмотки, который приблизительно равен одному полюсному делению.
Вращающееся поле статора и пересекает проводящие обмотки ротора, создает напряжение, чем и вызывает появление тока в обмотках и вращение ротора. На силу тока влияет подключенное сопротивление, причем зависимость обратно пропорциональная, то есть, чем выше сопротивление, тем, соответственно, сила тока ниже и наоборот. В свою очередь, вращающий момент наоборот прямо пропорционален и увеличивается с ростом сопротивления.
В случае с фазным ротором его разомкнутая обмотка выводится на контактные кольца для соединения с внешней схемой. Его используют для регулярно работающих электроприводов, не изменяющих скорость (или — в небольших пределах).
Двигатели постоянного тока сейчас используются только в промышленности и в сложных приборах, где важно точное регулирование скорости работы (прокатные станы, мощные металлорежущие станки, тяга на транспорте). Их отличает высокая стоимость, а также некоторые преимущества, которые оказываются важными на сложном оборудовании: более высокий КПД, возможность плавной и точной регулировки оборотов, частота вращения может быть очень высокой, чем в случае с переменным.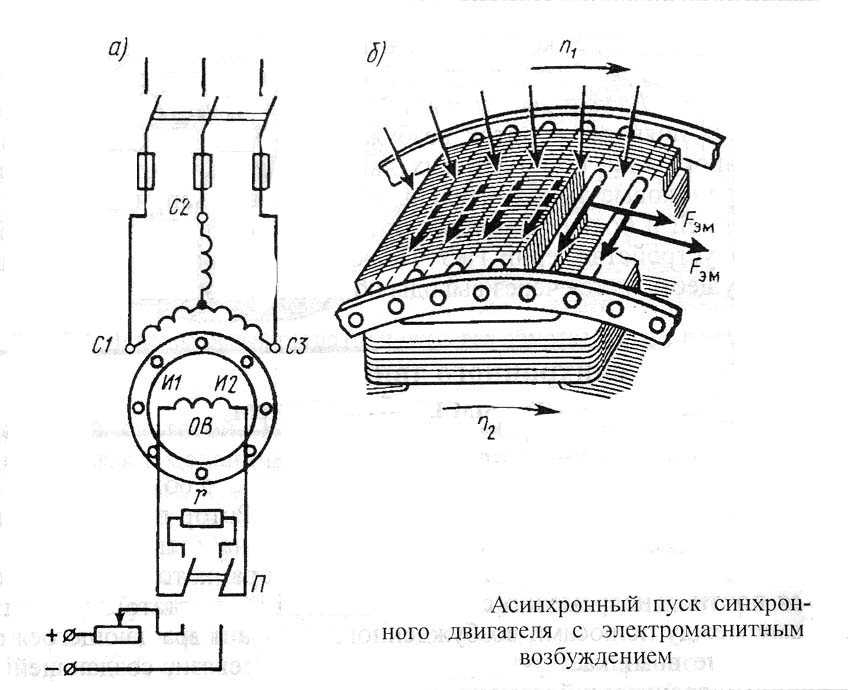
Также в наукоемких точных отраслях используются шаговые двигатели и серводвигатели, в которых можно регулировать многие параметры.
Статью предоставила компания НПП «Сервомеханизмы» www.servomh.ru — производитель и поставщик устройств линейного перемещения, электродвигателей, муфт для валов и комплектующих.
Рассмотрите их устройство, принцип действия, область применения. Стоит отметить, что сегодня в промышленности более 95 процентов всех используемых двигателей приходится на асинхронные машины. Они получили большое распространение в связи с тем, что у них высокая надежность, они могут служить очень долго за счёт своей ремонтопригодности.
Принцип работы асинхронных двигателей
Чтобы понять, как функционирует электродвигатель, можно провести небольшой эксперимент. Конечно, для этого потребуется наличие специального инструмента. Установите магнит в форме подковы так, чтобы он приводился в движение при помощи ручки. Как вы знаете, у магнита имеется два полюса. Между ними необходимо расположить цилиндр, изготовленный из меди. С таким расчетом, что он может свободно вокруг своей оси вращаться. Теперь сам эксперимент. Начинаете раскручивать магнит, при этом создается поле, которое двигается. Внутри медного цилиндра начинают возникать которые противодействуют полю магнита.
Между ними необходимо расположить цилиндр, изготовленный из меди. С таким расчетом, что он может свободно вокруг своей оси вращаться. Теперь сам эксперимент. Начинаете раскручивать магнит, при этом создается поле, которое двигается. Внутри медного цилиндра начинают возникать которые противодействуют полю магнита.
В результате этого медный цилиндр начинает вращение в ту сторону, в которую двигается Причем его скорость оказывается несколько ниже. Причина этого — при равной скорости силовые линии перестают пересекаться с полем магнита. Магнитное поле вращается синхронно. А вот скорость движения самого магнита несинхронна. А если немножко сократить определение, то асинхронна. Отсюда и название электрической машины — асинхронного электродвигателя. Если грубо, то схема электродвигателя переменного тока примерно такая же, как и в приведенном эксперименте. Только магнитное поле создается статорной обмоткой.
Двигатели постоянного тока
Они несколько отличаются от асинхронных электродвигателей переменного тока.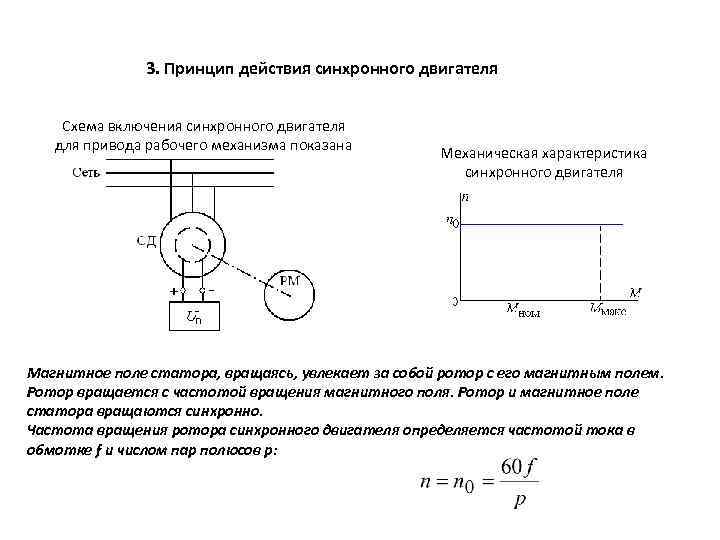 Во-первых, в нём имеется одна или две статорных обмотки. Во-вторых, способ изменения частоты вращения ротора несколько иной. Но направление вращения ротора изменяется переполюсовкой (у асинхронных машин меняются местами фазы питающей сети). Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Во-первых, в нём имеется одна или две статорных обмотки. Во-вторых, способ изменения частоты вращения ротора несколько иной. Но направление вращения ротора изменяется переполюсовкой (у асинхронных машин меняются местами фазы питающей сети). Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Не может работать без обмотки возбуждения, которая находится на роторе. Передача напряжения происходит при помощи щеточного узла. Это самый ненадежный элемент конструкции. Щетки, изготовленные из графита, со временем стираются, что приводит к выходу из строя мотора, ему необходим ремонт. Заметьте, что электродвигатели постоянного и переменного тока имеют одни и те же элементы, но их конструкции отличаются существенно.
Конструкция электродвигателя
Как и любая другая нестатическая электрическая машина, асинхронный двигатель состоит из двух основных частей — статора и ротора. Первый элемент неподвижный, на нём размещаются три обмотки, которые соединяются по определенной схеме. Ротор является подвижным, его конструкция называется «беличьей клеткой». Причина такого названия в том, что внутреннее устройство очень похоже на колесо с белкой.
Ротор является подвижным, его конструкция называется «беличьей клеткой». Причина такого названия в том, что внутреннее устройство очень похоже на колесо с белкой.
Последней, конечно же, нет в электродвигателе. Центровка ротора производится при помощи двух крышек, устанавливаемых на статоре. В них имеются подшипники, которые облегчают вращение. На задней части электродвигателя устанавливается крыльчатка. С ее помощью проводится охлаждение электрической машины. На статоре сделаны ребра, которые улучшают теплоотдачу. Таким образом электродвигатели переменного тока работают в нормальном тепловом режиме.
Статор асинхронного двигателя
Стоит отметить, что у статора современных асинхронных электродвигателей полюсы невыраженные. Если говорить проще, то внутри вся поверхность идеально гладкая. В целях уменьшения потерь на вихревых токах, сердечник набирается из очень тонких листов стали. Эти листы очень плотно прилегают друг другу и впоследствии закрепляются в корпусе из стали. Статор имеет пазы для закладывания обмоток.
Статор имеет пазы для закладывания обмоток.
Обмотки изготовлены из медного провода. Соединение их производится в «звезду» или «треугольник». В верхней части корпуса имеется небольшой щиток, полностью заизолированный. В нем находятся контакты для подключения и соединения обмоток. Причем соединить обмотки можно при помощи перемычек, устанавливаемых в этом щитке. Устройство электродвигателя переменного тока позволяет быстро провести соединение обмоток в нужную схему.
Ротор асинхронного электродвигателя
О нем было уже немного сказано. Он похож на беличью клетку. Конструкция ротора собирается из тонких стальных листов, как и статора. В пазах ротора находится обмотка, но она может быть нескольких типов. Все зависит от того, фазный или короткозамкнутый ротор. Наиболее распространенные последние конструкции. Толстые медные стержни укладываются в пазы без изоляционного материала. С обоих концов эти стержни соединяются медными кольцами. Иногда вместо «беличьей клетки» применяются литые роторы.
Но есть еще электродвигатели переменного тока с фазным ротором. Они используются намного реже, в основном для электродвигателей, у которых очень большая мощность. Второй случай, при котором необходимо использовать фазные роторы в электродвигателях — создание большого усилия в момент запуска. Правда, для этого необходимо использовать специальный реостат.
Способы запуска асинхронного электродвигателя
Запустить асинхронный электродвигатель переменного тока несложно, достаточно только подключить статорные обмотки в трехфазную сеть. Производится подключение при помощи магнитных пускателей. Благодаря им можно практически автоматизировать запуск. Даже реверс сделать можно без особых трудностей. Но в некоторых случаях необходимо снижать напряжение, которое подводится к статорным обмоткам.
Производится это благодаря использованию схемы подключения типа «треугольник». При этом запуск производится, когда обмотки соединены по схеме «звезда». При увеличении числа оборотов, достижении максимального значения обмотки необходимо переключить на схему «треугольник». При этом происходит уменьшение потребляемого тока примерно в три раза. Но необходимо учитывать, что не каждый статор может нормально функционировать при подключении по схеме «треугольник».
При этом происходит уменьшение потребляемого тока примерно в три раза. Но необходимо учитывать, что не каждый статор может нормально функционировать при подключении по схеме «треугольник».
Регулирование частоты вращения
В промышленности и быту все большую популярность приобретают частотные преобразователи. С их помощью можно легким движением руки изменить скорость вращения ротора. Стоит заметить, что электродвигатели переменного тока используются совместно с частотными преобразователями в большинстве механизмов. Он позволяет осуществить тонкую настройку привода, при этом нет необходимости использовать магнитные пускатели. Все органы управления подключаются к контактам на частотном преобразователе. Настройки позволяют изменять время разгона ротора электродвигателя, его остановки, время минимальной и максимальной скорости, а также множество других защитных функций.
Заключение
Теперь вы знаете, как происходит работа электродвигателя переменного тока. Даже изучили конструкцию наиболее популярного асинхронного двигателя. Он является самым дешевым из всех, которые представлены на рынке. Кроме того, для его нормального функционирования нет необходимости использовать различные вспомогательные устройства. В частности, реостаты. И только такое дополнение, как частотный преобразователь, способно облегчить эксплуатацию асинхронного электродвигателя, существенно расширить его возможности.
Он является самым дешевым из всех, которые представлены на рынке. Кроме того, для его нормального функционирования нет необходимости использовать различные вспомогательные устройства. В частности, реостаты. И только такое дополнение, как частотный преобразователь, способно облегчить эксплуатацию асинхронного электродвигателя, существенно расширить его возможности.
Электродвигатель переменного тока
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина , в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Классификация электродвигателей
- Двигатель постоянного тока постоянным током ;
- Коллекторные двигатели постоянного тока. Разновидности:
- С возбуждением постоянными магнитами;
- С параллельным соединением обмоток возбуждения и якоря;
- С последовательным соединением обмоток возбуждения и якоря;
- Со смешанным соединением обмоток возбуждения и якоря;
- Бесколлекторные двигатели постоянного тока (вентильные двигатели) с электронным переключателем тока;
- Коллекторные двигатели постоянного тока. Разновидности:
- Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током , имеет две разновидности:
- Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
- Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
- Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазные
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
- Вентильные двигатели — Электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности.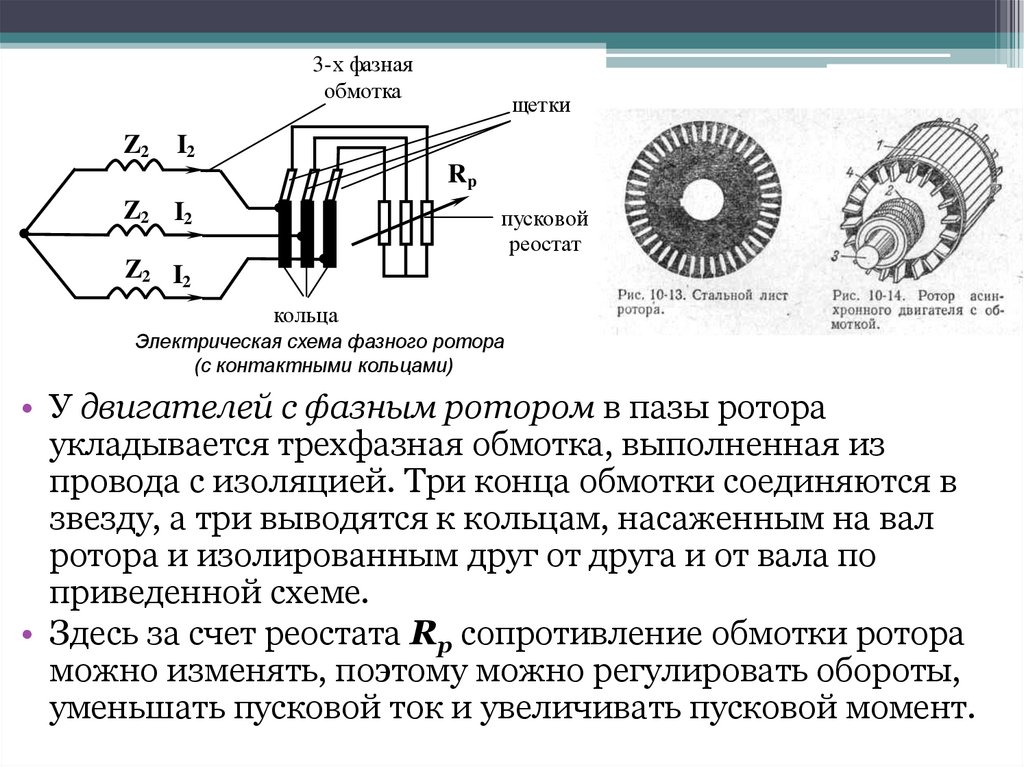 При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Ссылки
Wikimedia Foundation . 2010 .
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… …
Электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
т. м.… … Большая советская энциклопедия
Машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока — 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор;
|
Заглавная страница
КАТЕГОРИИ: Археология ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ? Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. |
⇐ ПредыдущаяСтр 9 из 18Следующая ⇒ Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ. По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма. Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. . Скорость асинхронного двигателя в рабочих режимах , где синхронная частота вращения магнитного поля ; – частота питающего напряжения ; – число пар полюсов.
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой .
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку. Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2). При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости. Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям. СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц — СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.). Синхронные двигатели имеют перегрузочную способность . Еще одной особенностью СД является возможность работать с величиной , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу. Механические характеристики синхронного двигателя представлены на рис. 4.3 (прямая 1). Для синхронных двигателей важное значение имеет угловая характеристика, то есть зависимость момента синхронной машины от угла .
⇐ Предыдущая45678910111213Следующая ⇒ Читайте также: Алгоритмические операторы Matlab Конструирование и порядок расчёта дорожной одежды Исследования учёных: почему помогают молитвы? Почему терпят неудачу многие предприниматели? |
||||||||
|
Последнее изменение этой страницы: 2017-02-16; просмотров: 140; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia. |

 Определение реакций опор и моментов защемления
Определение реакций опор и моментов защемления
 Схема включения АД СС КЗР представлена на рис. 4.1, а.
Схема включения АД СС КЗР представлена на рис. 4.1, а. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения

 Угол — это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при является неустойчивым.
Угол — это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при является неустойчивым. su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.006 с.)
su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.006 с.)Разница между синхронной и асинхронной передачей
Сравнение связи
Автор: Engr. Mizan
Синхронная и асинхронная передача — это 2 типы последовательной передачи данных. Но принципиальное различие между синхронной и асинхронной передачей заключается в том, что при синхронной передаче общий тактовый импульс используется передатчиком и приемником для обеспечения синхронизированной связи.
В отличие от асинхронной передачи, отправитель и получатель имеют свои собственные внутренние часы, поэтому им не нужен внешний общий тактовый импульс.
Синхронная передача обеспечивает непрерывный поток данных между отправителем и получателем. Однако метод асинхронной передачи не обеспечивает непрерывный поток данных.
Однако метод асинхронной передачи не обеспечивает непрерывный поток данных.
Мы обсудим некоторые другие важные факторы, отличающие синхронную передачу от асинхронной. Но перед этим посмотрите, каково содержание, которое мы обсудим в этой статье.
Содержание
Сравнительная диаграмма
| Основа для сравнения | Синхронная трансмиссия | Asynchronous | Asynchronous | | 9. . | Использует стартовый бит и стоповый бит перед и после символа соответственно. | | ||||||||||||||||||||
| Способ передачи | Отправляет данные в виде блоков или кадров | Отправляет 1 байт или символ за раз | ||||||||||||||||||||||||
| Синхронизация | Присутствует с тем же тактовым импульсом. | Отсутствует | ||||||||||||||||||||||||
| Реализовано | Аппаратное обеспечение и программное обеспечение | .Не существует | Существует | |||||||||||||||||||||||
| Интервал времени | Постоянный | Случайный | ||||||||||||||||||||||||
| Примеры | Письма, электронная почта, форумы и так далее. |
 0029
0029
Определение синхронной передачи
В синхронной передаче данные передаются в полнодуплексном режиме в форме кадра. Синхронизация между отправителем и получателем важна, чтобы отправитель знал, где начинается новый байт (поскольку между данными нет промежутка). Поэтому каждый блок символов помечен символами синхронизации, и принимающее устройство получает данные до тех пор, пока не будет идентифицирован специальный конечный символ.
Синхронная передача эффективна, надежна и используется для передачи большого объема данных. Он обеспечивает связь между подключенными устройствами в режиме реального времени. Чаты, видеоконференции, телефонные разговоры и т. д., а также общение лицом к лицу. Вот некоторые примеры синхронной передачи.
Вот некоторые примеры синхронной передачи.
Голосовой и широкополосный каналы обычно используются в синхронных режимах передачи, так как обеспечивают более высокую скорость до 1200 бит/с и служат цели высокой скорости передачи данных.
Определение асинхронной передачи
В Асинхронная передача данные передаются в полудуплексном режиме, по 1 байту за раз. Он передает данные непрерывным потоком байтов. Как правило, размер отправляемого символа составляет 8 бит, к которым добавляется бит равенства, т. е. стартовый и стоповый биты, что в сумме дает 10 бит.
Для синхронизации не требуются часы, вместо этого используются биты четности, чтобы сообщить получателю, как интерпретировать данные. Эти биты четности называются стартовым и стоповым битами, которые управляют передачей данных.
Используется посимвольная синхронизация, чтобы приемный терминал мог синхронизироваться с приемом данных/информированием о символе. Это просто, быстро, выгодно и не требует двусторонней связи. Письма, электронная почта, форумы, телевидение, радио и т. д. — вот некоторые из примеров асинхронной передачи.
Письма, электронная почта, форумы, телевидение, радио и т. д. — вот некоторые из примеров асинхронной передачи.
В асинхронной передаче используются узкополосные каналы голосового диапазона, работающие на более низкой скорости. Здесь передающее устройство работает вручную.
Основные различия между синхронной и асинхронной передачей
- Синхронная передача позволяет передавать данные в формате кадра или блока. Принимая во внимание, что при асинхронной передаче байт/символ передается за раз.
- Из-за передачи данных в виде кадров скорость передачи данных достаточно высока при синхронной передаче. В то время как при асинхронной передаче скорость передачи данных сравнительно низкая.
- Синхронная связь требует синхронизации между отправителем и получателем, поэтому они используют общий тактовый импульс. Напротив, асинхронная связь не допускает синхронизированной связи, поэтому отправитель и получатель имеют свои собственные внутренние часы.
- Благодаря наличию тактового импульса данные в виде кадров могут непрерывно передаваться между отправителем и получателем. В то время как отсутствие общего тактового импульса вызывает наличие промежутков между битами данных.
- Синхронная передача не требует стартовых и стоповых битов . В отличие от того, чтобы иметь асинхронную передачу между отправителем и получателем, стартовые и стоповые биты обязательно необходимы до и после битов сигнала сообщения.
- Временной интервал передачи остается постоянным между передаваемыми данными. Однако в случае асинхронной передачи существуют переменные интервалы времени между битами данных.
- Система, поддерживающая синхронную передачу, сравнительно сложный , чем система асинхронной передачи.
- Благодаря синхронизированной связи синхронная передача является более эффективной по сравнению с асинхронной передачей.
- Комплексирование системы при синхронной передаче увеличивает стоимость системы. Таким образом, синхронная передача дороже, чем асинхронная передача.

 Таким образом, синхронная передача дороже, чем асинхронная передача.
Таким образом, синхронная передача дороже, чем асинхронная передача.Заключение
Как синхронная, так и асинхронная передача имеют свои преимущества и недостатки. Асинхронный прост, экономичен и используется для передачи небольшого количества данных.
Синхронная передача, наоборот, используется для передачи больших объемов данных, поскольку она эффективна и требует меньших накладных расходов. Следовательно, мы заканчиваем, что для передачи данных необходимы как синхронная, так и асинхронная передача.
Wikipedia
Engr. Mizan
Я инженер по электротехнике и электронике, а также у меня более 6 лет опыта работы с WordPress, написанием статей и SEO. У меня есть сильные технические навыки письма. Я могу быстро понять и реализовать сложные концепции. Я внимательно читаю, чтобы найти скрытый смысл. Тогда я пишу о них кратко и ясно.
Теги асинхронная передача разница между синхронным и асинхронным счетчиком синхронная и асинхронная передача ppt синхронная передачаразница между серводвигателем и трехфазным синхронным двигателем
Добро пожаловать на EDAboard.
 com
comДобро пожаловать на наш сайт! EDAboard.com — это международный дискуссионный форум по электронике, посвященный программному обеспечению EDA, схемам, схемам, книгам, теории, документам, asic, pld, 8051, DSP, сети, радиочастотам, аналоговому дизайну, печатным платам, руководствам по обслуживанию… и многому другому. более! Для участия необходимо зарегистрироваться. Регистрация бесплатна. Нажмите здесь для регистрации.
Регистрация Авторизоваться
JavaScript отключен. Для лучшего опыта, пожалуйста, включите JavaScript в вашем браузере, прежде чем продолжить.
- Автор темы кольцо0
- Дата начала
- Статус
- Закрыто для дальнейших ответов.

кольцо0
Участник уровня 3
Серводвигатель вопрос
У меня пока очень мало опыта работы с двигателями, поэтому вопрос может показаться глупым, но…
В чем разница между серводвигателем и обычным трехфазным синхронным двигателем? Я имею в виду, могу ли я управлять последним с помощью соответствующего частотного преобразователя и энкодера, как если бы это был сервопривод? А как быть с асинхронными двигателями?
сандервуд
Членский уровень 4
Вопрос о серводвигателе
Привет,
Я думаю, что делает двигатель сервоприводом так, как вы им управляете (по замкнутому контуру). Поэтому в качестве серводвигателей могут использоваться трехфазные синхронные и асинхронные двигатели. Способы управления этими двумя типами двигателей различны из-за того, что в синхронных машинах поле либо постоянное (магниты), либо управляется независимо.
зеленый лес
Уровень новичка 4
Re: Серводвигатель вопрос
ring0 сказал:
У меня пока очень мало опыта работы с двигателями, поэтому вопрос может показаться глупым, но…
чем отличается серводвигатель от обычного трехфазного синхронного двигателя? Я имею в виду, могу ли я управлять последним с помощью соответствующего частотного преобразователя и энкодера, как если бы это был сервопривод? А как быть с асинхронными двигателями?
Нажмите, чтобы развернуть…
Сервосистема представляет собой систему управления с обратной связью, поэтому серводвигатели должны иметь энкодер или резольвер, тахометр или другие измерительные устройства.
Трехфазные синхронные двигатели имеют измерительные устройства, это серводвигатели.
Трехфазные синхронные двигатели не имеют измерительных устройств, они не являются серводвигателями
кольцо0
Участник уровня 3
Re: разница между серводвигателем и 3-фазным синхронным двигателем м
Спасибо, Сандервуд, я просто думал о том же, но мне нужен был кто-то, кто это подтвердит.
Мистер Крутой
Расширенный член уровня 2
Re: разница между серводвигателем и трехфазным синхронным двигателем
да? Синхронные двигатели
также являются замкнутыми контурами. ваш ток должен быть синфазным с противо-ЭДС двигателя, иначе он не работает! правда, вам не нужно контролировать положение, регулируйте положение, если вы не хотите — это необязательно для синхронного двигателя. но вы определенно должны знать положение и, по крайней мере, направлять этот сигнал на вращающийся вектор вашего контроллера.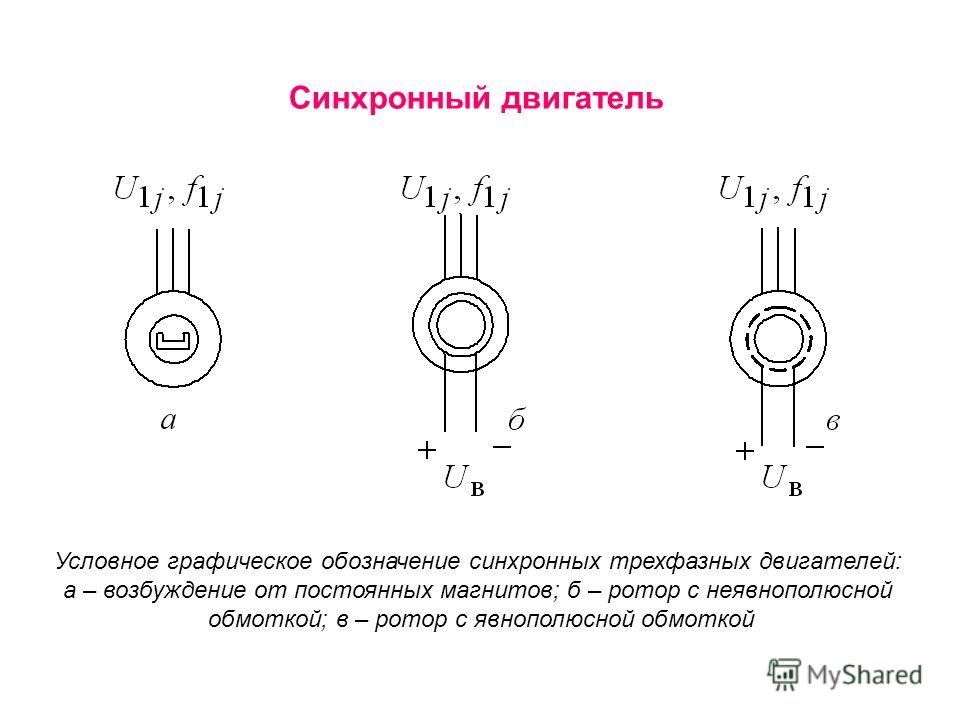 используйте его напрямую или регулируйте его, в обоих сценариях требуется обратная связь по положению (как минимум).
используйте его напрямую или регулируйте его, в обоих сценариях требуется обратная связь по положению (как минимум).
я думаю, что разница невелика… шаговый двигатель — это контроллер положения. это означает, что он поворачивается на определенное расстояние, а затем останавливается в определенном положении. поэтому упор (точность, воспроизводимость и т. д.) делается на контроль положения. эти двигатели обычно имеют более трех фаз, но что с того… вы просто копируете одно и то же оборудование X раз и учитываете это в своем алгоритме управления.
Синхронный двигатель предназначен для создания крутящего момента при непрерывном вращательном движении.
силовая электроника такая же, возможно только количество фаз другое. алгоритм управления имеет такую же топологию. например, вполне разумно иметь контур управления положением и на СИНХРОННОМ двигателе.. зависит от приложения, требуется ли такой уровень точности управления скоростью. да, есть и контур управления скоростью.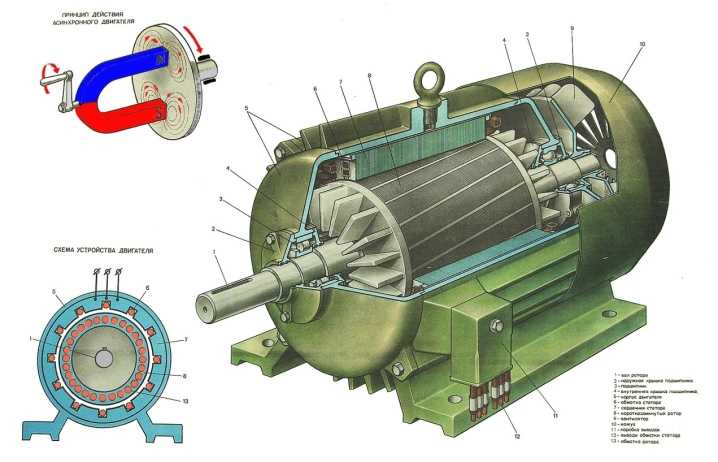 .. но вам может понадобиться еще больше регулирования, поэтому вы добавляете контур положения. в чем разница между высокоточным синхронным двигателем и шаговым двигателем?
.. но вам может понадобиться еще больше регулирования, поэтому вы добавляете контур положения. в чем разница между высокоточным синхронным двигателем и шаговым двигателем?
Мистер Крутой
- Статус
- Закрыто для дальнейших ответов.
Т
Вопрос выбора двигателя: автоматизация ручного управления Однокривошипная больничная койка
- Автор therealsana
- Ответов: 1
Форум робототехники и автоматизации
М
Регулировка драйвера шагового двигателя
- Запущено mshh
- Ответов: 7
Форум робототехники и автоматизации
Д
Управление двигателем постоянного тока с помощью Matlab
- Запущено другой стороной
- Ответов: 2
Форум робототехники и автоматизации
Е
Покупка двигателей и их драйверов + методы управления
- Автор eagle1109
- Ответов: 1
Форум робототехники и автоматизации
ЧАС
Роботизированный манипулятор или серводвигатель для моего приложения
- Автор: hussain1. bangalore
- Ответов: 3
Форум робототехники и автоматизации
- Автор: hussain1.
 bangalore
bangaloreДелиться:
Фейсбук Твиттер Реддит Пинтерест Тамблер WhatsApp Эл. адрес Делиться Ссылка на сайт
Верх
Какие двигатели для электромобилей самые популярные?
Люди все больше интересуются электромобилями (EV). Им не нравится планировать расходы на бензин, и они обеспокоены, например, влиянием автомобилей, работающих на топливе. Некоторые люди также поддерживают идею быть первыми, кто внедряет новейшие инновации.
Электромобили импонируют тем, что позволяют быть на острие прогресса.
Широкие категории двигателей для электромобилей
Существует два основных типа электродвигателей, которые можно встретить в электромобилях. Давайте рассмотрим их здесь.
Асинхронные двигателиАсинхронные двигатели — или асинхронные двигатели — имеют электрические компоненты, называемые статорами, которые создают вращающиеся магнитные поля. Статор представляет собой витой провод внутри двигателя. Он имеет магнит на валу. Когда магнит вращается, он генерирует переменный ток.
Возникающее магнитное поле притягивает сопутствующие роторы, заставляя их вращаться. Именно это действие создает энергию, которая вращает шестерни автомобиля и, в конечном счете, его колеса. Инженеры часто выбирают эти двигатели для электромобилей для транспортных средств, на которых люди будут ездить на высоких скоростях в течение длительного времени.
Синхронные двигатели В синхронном двигателе ротор ведет себя как электромагнит и создает магнитное поле. В то время как поля статора асинхронного двигателя вращаются быстрее, чем ротор, ротор и статор вращаются с одинаковой скоростью в синхронном двигателе. Общая скорость зависит от частоты тока, питающего двигатель.
Электромобили, продаваемые людям, интересующимся городским вождением, часто имеют синхронные двигатели. Это потому, что они хорошо подходят для частых остановок, а также для запуска на медленных скоростях, как это может делать кто-то во время интенсивного движения.
Насколько надежны электродвигатели?
Несмотря на то, что электромобили появились относительно недавно, люди используют электродвигатели в различных отраслях промышленности, требующих непрерывной работы машин.
Некоторые промышленные электродвигатели содержат десятки или сотни деталей, которые работают вместе для обеспечения функциональности. Такие аспекты, как температура, влажность и чрезмерная запыленность, могут сократить срок службы промышленного электродвигателя. Однако руководители компаний обычно подвергают компоненты периодическому тестированию в качестве превентивной меры.
Что касается электромобилей, то их основной движущейся частью является якорь, который представляет собой компонент, содержащий катушки. Большинство таких гарантий на транспортные средства сосредоточены на времени вождения. Например, вы можете увидеть гарантии на 80 000–100 000 километров или миль, в зависимости от показателя, используемого на вашем рынке.
Особые типы двигателей для электромобилей
Помимо упомянутых выше категорий электродвигателей, в электромобилях чаще всего используются три типа: бесщеточные асинхронные двигатели, щеточные синхронные двигатели с внешним возбуждением и бесщеточные синхронные двигатели с постоянными магнитами.
Бесщеточные синхронные двигатели с постоянными магнитами Бесщеточные синхронные двигатели с постоянными магнитами похожи на упомянутые ранее асинхронные двигатели тем, что имеют статор и ротор. Кроме того, ротор содержит редкоземельные металлы, такие как неодим и диспрозий. Это ферромагнитные материалы, которые допускают постоянную намагниченность.
Контроллер последовательно активирует электромагниты статора, создавая магнитное поле, которое вращается вокруг ротора. Затем магнитные поля ротора пытаются не отставать от вращающегося поля с той же скоростью, с которой он движется — отсюда и «синхронная» часть названия. Эти действия заставляют ротор вращаться.
Этот тип является наиболее распространенным типом электродвигателя, который можно увидеть в таких автомобилях, как Nissan Leaf, и автомобилях с некоторыми автономными функциями, таких как Tesla Model 3. Многие люди надеются, что беспилотные автомобили изменят наше общество, улучшив транспортные возможности, в то время как сокращение владения автомобилями.
Бесщеточные асинхронные асинхронные двигатели Этот тип двигателя имеет статоры и роторы, состоящие из электромагнитных катушек. Когда магнитные поля статора вращаются, они создают электрический ток и магнитное поле в обмотках ротора. Это происходит, когда поля статора вращаются немного быстрее, чем ротор.
Tesla Model S — один из примеров электромобиля с двигателем такого типа. Вы также увидите этот тип асинхронного двигателя в высокопроизводительных автомобилях, поскольку они могут производить больше энергии, чем двигатели с магнитами.
Однако преимущество синхронных двигателей магнитного типа, рассмотренных ранее, заключается в том, что они более эффективны, чем двигатели, использующие асинхронные двигатели. Это потому, что нет необходимости использовать электричество для создания магнитного поля. Магниты всегда активированы. Дизайнеры обычно выбирают двигатели магнитного типа для небольших и легких автомобилей.
Коллекторные синхронные двигатели с внешним возбуждением Эти двигатели также имеют статоры и роторы, но основное различие между этой категорией и асинхронными двигателями заключается в том, что роторы подключаются к источнику питания постоянного тока через вращающийся электрический контакт, называемый контактным кольцом. Такой подход генерирует магнитное поле, заставляя эти двигатели работать как типы с постоянными магнитами.
Renault Zoe является одним из примеров автомобиля, использующего этот тип. Китай является основным источником редкоземельных металлов, и производители сталкиваются с растущими трудностями при поиске их для двигателей с постоянными магнитами. Продолжается стремление создавать двигатели, которые функционируют как эти варианты, но не требуют специальных металлов.
Эти типы с внешним возбуждением являются одним из решений. По мере того, как они становятся все более распространенными, вы должны чаще видеть их в автомобилях, которые раньше имели двигатели с постоянными магнитами.
Двигатели для электромобилей — часть общей картины
Когда люди покупают электромобили, они думают не только о двигателях для электромобилей в моделях, которые они выбрали. Они также заботятся о сроке службы батареи, времени зарядки, функциях безопасности и возможностях помощи водителю.
Однако этот обзор показывает, что электродвигатели являются важнейшей частью современных электромобилей. Каждый тип работает по-своему и обеспечивает производительность, наиболее подходящую для определенного использования. Таким образом, если вы думаете о покупке электромобиля в ближайшее время или можете работать над проектами, касающимися их, понимание того, как работают двигатели, необходимо для получения положительных результатов.
Каждый тип работает по-своему и обеспечивает производительность, наиболее подходящую для определенного использования. Таким образом, если вы думаете о покупке электромобиля в ближайшее время или можете работать над проектами, касающимися их, понимание того, как работают двигатели, необходимо для получения положительных результатов.
Хотите продолжить чтение статей из DesignSpark?
Станьте участником, чтобы бесплатно получить неограниченный доступ ко всему контенту DesignSpark!
Зарегистрируйтесь, чтобы стать участником
Уже являетесь участником DesignSpark? Логин
Поделиться этой записью
thumb_upМне нравится star_borderПодписаться на статью
Эмили Ньютон — главный редактор журнала Revolutionized Magazine. У нее более трех лет опыта написания статей для технологического и промышленного секторов. Подпишитесь на информационный бюллетень Revolutionized, чтобы получать дополнительные материалы от Эмили по адресу https://revolutionized. com/subscribe/9.0003
com/subscribe/9.0003
Рекомендуемые статьи
Генератор переменного тока или синхронный генератор, детали, возбуждение, преимущества и отличия
Электрика
Энгр Фахад Отправить письмо 29 марта 2021 г.
3 363
Содержание
Генератор: Генераторы — это рабочая лошадка электроэнергетики. Мощность переменного тока будет генерироваться с заданной частотой. Его еще называют синхронным генератором . Генератор переменного тока представляет собой электрический генератор , который преобразует механическую энергию, которая обеспечивается с помощью первичного двигателя , в электрическую энергию в виде переменного тока . Электричество производится в генераторах переменного тока с использованием закона электромагнитной индукции Фарадея. Есть два типа производства электроэнергии в Генераторы переменного тока тип 1 с вращающимся магнитным полем и неподвижным якорем, тип 2 вращающийся якорь со стационарным магнитным полем.
Электричество производится в генераторах переменного тока с использованием закона электромагнитной индукции Фарадея. Есть два типа производства электроэнергии в Генераторы переменного тока тип 1 с вращающимся магнитным полем и неподвижным якорем, тип 2 вращающийся якорь со стационарным магнитным полем.
Электрическая частота , которая производится , заблокирована в или синхронизирована с механической скоростью вращения поля генератора.
Якорь будет в статоре, а поле в роторе. Ротор будет электромагнитом и будет приводиться в движение первичным двигателем с некоторой скоростью ω м /N м . Когда он будет вращаться, мы получим электрическую энергию. Это электричество будет иметь частоту, связанную f e с N m , которые очень тесно связаны друг с другом.
f= (PN m )/120
В синхронном генераторе N m — синхронная скорость. В отличие от асинхронных двигателей, в синхронном генераторе ротор будет вращаться только с одной скоростью. «f» — частота на выходе генератора. Это утверждение означает, что, например, если мы производим генератор с частотой 50 Гц или 60 Гц, генератор будет вращаться с определенной скоростью, которая зависит от количества полюсов. Например, если у нас есть источник питания 50 Гц, а машина имеет 2 полюса. Так как мы знаем, что
В отличие от асинхронных двигателей, в синхронном генераторе ротор будет вращаться только с одной скоростью. «f» — частота на выходе генератора. Это утверждение означает, что, например, если мы производим генератор с частотой 50 Гц или 60 Гц, генератор будет вращаться с определенной скоростью, которая зависит от количества полюсов. Например, если у нас есть источник питания 50 Гц, а машина имеет 2 полюса. Так как мы знаем, что
f= (PN м )/120
50= (2N м )/120
N м =3000 об/мин
Таким образом, это означает, что для двухполюсной машины необходимо вращать 50 Гц. генератор поля при 3000 об/мин ни на какой другой скорости не даст нам 50 Гц.
Теперь, например, если мы увеличим количество полюсов до 4, то и мы получим частоту 50 Гц.
f= (PN m )/120
Преобразовывая уравнение, получаем:
N m = (120 f)/P
Н м = (120 × 50)/4
Н м = 1500 об/мин
Это означает, что если мы увеличим количество полюсов, синхронная скорость уменьшится.
Внутреннее напряжение, генерируемое напряжением генератора переменного тока:
ЭДС, генерируемая в любой машине переменного тока, определяется уравнением:
Большинство генераторов переменного тока используют вращающееся магнитное поле со стационарным якорем. Электричество вырабатывается в генераторах переменного тока за счет электромагнитной индукции для выработки электричества в катушке либо катушка должна вращаться относительно магнитного поля, либо магнитное поле должно вращаться относительно катушки
Основными частями генератора являются ротор, подшипник статора, контактное кольцо.
Ротор:Ротор создает вращающееся магнитное поле с помощью стационарных катушек якоря, а вращающийся магнитный поток, связанный с ротором, индуцирует электричество в катушках якоря. Такой тип ротора известен как явнополюсный.
В случае Генератор переменного тока магнитное поле вращается относительно катушек. Катушки ротора и якоря являются двумя основными частями Генератор . Ротор создает вращающийся магнитный поток. Катушки якоря неподвижны, и вращающийся магнитный поток, связанный с ротором, индуцирует электричество в катушках якоря.
Катушки ротора и якоря являются двумя основными частями Генератор . Ротор создает вращающийся магнитный поток. Катушки якоря неподвижны, и вращающийся магнитный поток, связанный с ротором, индуцирует электричество в катушках якоря.
Процесс усиления и создания магнитного поля генератора путем подачи необходимого постоянного тока на обмотку возбуждения генератора . Ротор с четырьмя полюсами. Катушки ротора возбуждаются источником питания постоянного тока с помощью отдельного источника постоянного тока, называемого возбудителем.
Функция возбуждения:- Подача постоянного тока на обмотку возбуждения для создания магнитного поля
- Контроль реактивной мощности и напряжения
- Система возбуждения выполняет защитную функцию
- Система возбуждения постоянного тока
- Система возбуждения переменного тока
- Статическая система возбуждения
В качестве возбудителей используются два небольших генератора постоянного тока. Это самый старый из всех из-за различных проблем. В наши дни он обычно не используется для больших генераторов переменного тока с.
Это самый старый из всех из-за различных проблем. В наши дни он обычно не используется для больших генераторов переменного тока с.
Состоит из генератора переменного тока и тиристоров. Мост выпрямителя напрямую подключен к валу генератора или приводится в действие отдельным двигателем. Далее она делится на два типа:
- Бесщеточная система возбуждения
- Главный возбудитель имеет самовозбуждение
- Устранение щеток и контактных колец
- Простота обслуживания
- Быстрое время отклика
В этой системе возбуждения нет вращающихся частей. Он небольшого размера.
Работа генераторов: Первичный двигатель будет вращать ротор. Это заставляет поток ротора также вращаться вместе с ним с той же скоростью. Такой вращающийся магнитный поток теперь пересекает катушки якоря, установленные вокруг ротора, что создает переменную электромагнитную силу на обмотке. Так как у полярного ротора две пары NS полюсов, то при вращении ротора на пол-оборота ЭДС индукции совершает один полный цикл. Отсюда ясно, что частота ЭДС индукции прямо пропорциональна числу полюсов в скорости вращения ротора. Нетрудно установить, что частота ЭДС индукции, скорость вращения ротора и число полюсов связаны следующим соотношением:
Такой вращающийся магнитный поток теперь пересекает катушки якоря, установленные вокруг ротора, что создает переменную электромагнитную силу на обмотке. Так как у полярного ротора две пары NS полюсов, то при вращении ротора на пол-оборота ЭДС индукции совершает один полный цикл. Отсюда ясно, что частота ЭДС индукции прямо пропорциональна числу полюсов в скорости вращения ротора. Нетрудно установить, что частота ЭДС индукции, скорость вращения ротора и число полюсов связаны следующим соотношением:
f= (PN m )/120
Из этого соотношения видно, что частота вырабатываемого электричества синхронизирована с механической скоростью вращения для производства трехфазного переменного тока. Еще две такие же катушки якоря размещены при разности фаз 120 градусов в обмотке статора.
Как правило, один конец этих трех катушек соединен звездой, а трехфазное электричество подается с других концов. Нейтральный кабель может быть подключен к концу, соединенному звездой. Из уравнения видно, что для производства электроэнергии частотой 60 Гц четырехполюсный ротор должен вращаться со скоростью 1000 и 800 об/мин. Через такие огромные обороты будет создаваться центробежная сила на полюсах ротора. Таким образом, явно полярные роторы обычно имеют от 10 до 40 полюсов, что требует более низких оборотов. Явные и полярные роторы используются, когда первичный двигатель вращается с относительно меньшей скоростью от 120 до 400 об/мин. Полюсный сердечник используется для эффективной передачи магнитного потока, и они сделаны из довольно толстой стальной пластины. Такая изолированная пластина снижает потери энергии из-за образования вихревых токов. Постоянный ток подается на ротор через пару контактных колец. По этой причине подходы вращающегося магнитного поля, использованные в Генератор .
Через такие огромные обороты будет создаваться центробежная сила на полюсах ротора. Таким образом, явно полярные роторы обычно имеют от 10 до 40 полюсов, что требует более низких оборотов. Явные и полярные роторы используются, когда первичный двигатель вращается с относительно меньшей скоростью от 120 до 400 об/мин. Полюсный сердечник используется для эффективной передачи магнитного потока, и они сделаны из довольно толстой стальной пластины. Такая изолированная пластина снижает потери энергии из-за образования вихревых токов. Постоянный ток подается на ротор через пару контактных колец. По этой причине подходы вращающегося магнитного поля, использованные в Генератор .
Токосъемные кольца должны соответствовать методу вращающейся катушки с якорем для производства электроэнергии, но с контактными кольцами, передающими такое высокое напряжение, нецелесообразно. Токосъемные кольца используются для передачи низкого постоянного тока для возбуждения. Для обеспечения этого постоянного тока будет использоваться небольшой генератор постоянного тока, установленный на том же первичном двигателе. В таких генераторах генераторы переменного тока называются самовозбуждающимися, где напряжение изменяется в зависимости от изменения нагрузки генератора. Желательно поддерживать напряжение на клеммах в заданном пределе. Автоматический регулятор напряжения помогает в достижении этого, регулировка напряжения может быть легко достигнута путем управления током возбуждения. Если напряжение на клеммах ниже желаемого предела, регулятор увеличивает ток возбуждения. Это приведет к увеличению напряжения на клеммах, если напряжение на клеммах ниже указанного предела, произойдет обратное.
В таких генераторах генераторы переменного тока называются самовозбуждающимися, где напряжение изменяется в зависимости от изменения нагрузки генератора. Желательно поддерживать напряжение на клеммах в заданном пределе. Автоматический регулятор напряжения помогает в достижении этого, регулировка напряжения может быть легко достигнута путем управления током возбуждения. Если напряжение на клеммах ниже желаемого предела, регулятор увеличивает ток возбуждения. Это приведет к увеличению напряжения на клеммах, если напряжение на клеммах ниже указанного предела, произойдет обратное.
Прежде всего, мы должны иметь в виду, что якорь находится снаружи, а полюса возбуждения внутри. Полюса поля находятся на роторе, а ротор движется с помощью первичного двигателя, т.е. перемещаются полюса поля, за счет которых движется продукция. Обмотка якоря, находящаяся на статоре, будет создавать в нем ЭДС. Имея это в виду, мы можем понять следующие пункты:
- Изоляция, так как выход, который мы получаем от обмотки якоря, легко изолировать
- Без помех и других помех
- Поскольку мы получаем выход извне, поэтому нам не нужны токосъемные кольца и щетки, потому что есть вероятность искрения
- Поскольку мы используем систему возбуждения, которая обеспечивает вывод постоянного тока на обмотку возбуждения, для которой нам потребуются только два контактных кольца
- Размер машины уменьшен, так как обмотка якоря больше по размеру и тяжелее, чем обмотка возбуждения. Поэтому, если мы поместим его внутрь, размер машины увеличится.
- Высокая скорость вращения
- Легкое охлаждение
 Поэтому, если мы поместим его внутрь, размер машины увеличится.
Поэтому, если мы поместим его внутрь, размер машины увеличится.Существует разница между генератором и генератором и генератором , но многие люди говорят, что обе эти вещи похожи и работают одинаково. Таким образом, генератор и генератор переменного тока — это одно и то же, и это совершенно неверно, потому что вы знаете, что обе эти машины используются для преобразования механической энергии в электрическую и обе потребляют одинаковое количество или ту же мощность, что и механическая энергия, и их основная работа. заключается в выработке электроэнергии, но в чем разница? Разница в их конструкции. Есть определенные отличия:
Генератор переменного тока и генераторы используются для выработки электроэнергии. Генератор переменного тока также известен как синхронный генератор. Оба выполняют одну и ту же функцию, но они совершенно разные во всех аспектах. Генератор переменного тока используется для производства трехфазной энергии из механической энергии. Первое различие в основном для генератора заключается в том, что под генератором мы подразумеваем машину, которая генерирует постоянный ток, например генератор постоянного тока, он также может быть генератором переменного тока, который мы называем асинхронным генератором, или генератором переменного тока, который в основном представляет собой асинхронный двигатель, работающий при определенных условиях. . Где он вырабатывает электроэнергию, пока Генератор переменного тока предназначен только для выработки переменного тока, постоянного тока нет. Вы можете понять это по тому, что он называется Alternator , поэтому Alternator означает переменный генератор.
Оба выполняют одну и ту же функцию, но они совершенно разные во всех аспектах. Генератор переменного тока используется для производства трехфазной энергии из механической энергии. Первое различие в основном для генератора заключается в том, что под генератором мы подразумеваем машину, которая генерирует постоянный ток, например генератор постоянного тока, он также может быть генератором переменного тока, который мы называем асинхронным генератором, или генератором переменного тока, который в основном представляет собой асинхронный двигатель, работающий при определенных условиях. . Где он вырабатывает электроэнергию, пока Генератор переменного тока предназначен только для выработки переменного тока, постоянного тока нет. Вы можете понять это по тому, что он называется Alternator , поэтому Alternator означает переменный генератор.
- В генераторе энергия, которую мы получаем от первичного двигателя, должна быть преобразована в электроэнергию переменного тока при определенном напряжении и частоте. В Генератор переменного тока индуцирует только переменный ток, постоянного тока нет.
- В генераторе переменного тока электричество вырабатывается, когда магнит вращается в статоре или обмотке, что означает наличие вращающегося поля.
- Генератор не может зарядить разряженный аккумулятор, а если его зарядить, то существует вероятность перегорания.
- Генератор питается от статора
- Якорь генератора неподвижен во вращающемся магнитном поле
- В генераторе у нас есть широкий диапазон оборотов
- Генератор переменного тока считается более эффективным, чем генератор, поскольку он сохраняет свою энергию, используя только необходимую энергию, а оставшуюся энергию сохраняет.
- Выходная мощность генератора максимальна, чем у генератора. Выходная ЭДС генератора переменного тока является переменной
- Трехфазный генератор переменного тока в основном используется, потому что он имеет несколько преимуществ в распределении, генерации и передаче. он также используется в современных автомобилях.
 В Генератор переменного тока индуцирует только переменный ток, постоянного тока нет.
В Генератор переменного тока индуцирует только переменный ток, постоянного тока нет. он также используется в современных автомобилях.
он также используется в современных автомобилях.- Генератор преобразует механическую энергию в электрическую, и эта электрическая энергия может быть как переменного, так и постоянного тока. Генератор может индуцировать как переменный, так и постоянный ток.
- В генераторах якорь или проволочная обмотка вращается в постоянном магнитном поле для выработки электричества.
- Генератор можно использовать для зарядки разряженного аккумулятора
- Генератор получает питание от ротора
- Якорь в генераторе вращается в постоянном магнитном поле
- В генераторе у нас узкий диапазон оборотов
- Генератор использует всю произведенную энергию
- Выходная ЭДС генератора постоянна Генератор переменного тока
- используется для питания всего, что требует питания переменного тока, например, освещения, вентиляторов, больших двигателей и т. д., в то время как генератор постоянного тока используется для тестирования в лабораториях. Он также используется в качестве источника питания двигателей постоянного тока. Он также используется для общего освещения и для зарядки аккумулятора.
 Он также используется в качестве источника питания двигателей постоянного тока. Он также используется для общего освещения и для зарядки аккумулятора.
Он также используется в качестве источника питания двигателей постоянного тока. Он также используется для общего освещения и для зарядки аккумулятора.4. Типы генераторов; синхронный против асинхронного. Что происходит внутри машин?
Существует два основных типа машин переменного тока, используемых для производства электроэнергии; синхронный и асинхронный. Разница между ними начинается с того, как магнитное поле ротора взаимодействует со статором. Оба типа машин могут использоваться в качестве генератора или двигателя.
Синхронная машина
Начнем с описания синхронного генератора. Ротор — это просто магнит на валу. На практике магнит обычно представляет собой электромагнит. Статор состоит из трех витков провода, расположенных так, чтобы они пересекались с магнитным полем ротора, на равном расстоянии друг от друга по окружности, 120 или отдельно. Каждая катушка обеспечивает ток для одной фазы сети. Когда ротор вращается вокруг каждой катушки, индуцированный ток в каждой катушке возрастает и падает в положительном и отрицательном направлениях по мере прохождения северного и южного полюсов ротора. Каждый оборот генерирует один цикл тока. Генерируемая частота напрямую связана со скоростью вращения ротора. Для машины с одним магнитом (двухполюсной) частота 50 Гц генерируется при вращении со скоростью 3000 об/мин. Ротор с четырьмя полюсами генерирует 50 Гц при вращении со скоростью 1500 об/мин.
Каждый оборот генерирует один цикл тока. Генерируемая частота напрямую связана со скоростью вращения ротора. Для машины с одним магнитом (двухполюсной) частота 50 Гц генерируется при вращении со скоростью 3000 об/мин. Ротор с четырьмя полюсами генерирует 50 Гц при вращении со скоростью 1500 об/мин.
Следовательно, рабочая скорость вращения синхронной машины по существу постоянна (в пределах небольшого окна). Его скорость привязана к системной частоте. Синхронные машины управляются регулятором. Регулятор контролирует системную частоту и регулирует мощность первичного двигателя машины, чтобы скорректировать частоту. Это, конечно, зависит от мощности машины и от того, работает ли она на установленной мощности, при которой можно легко увеличить (или уменьшить) мощность.
Когда на вал подается механическая энергия, ротор движется вперед относительно вращающегося поля, создаваемого системными напряжениями на обмотках статора. Машина по-прежнему находится в синхронном вращении с напряжением системы, но теперь ротор опережает систему на угол d . Угол d изменяется в зависимости от подаваемой и генерируемой мощности, где мощность пропорциональна Sin ( d) . Если d положительный, машина опережает систему и действует как генератор. Если d отрицательный, машина движется системой и действует как двигатель. Если d равно нулю, машина вращается, но передача энергии не происходит. Обратите внимание, что Sin ( d) максимизируется при 90 o . Это предел угла опережения ротора, относящийся к теоретическому максимальному крутящему моменту, который способна обеспечить машина.
Угол d изменяется в зависимости от подаваемой и генерируемой мощности, где мощность пропорциональна Sin ( d) . Если d положительный, машина опережает систему и действует как генератор. Если d отрицательный, машина движется системой и действует как двигатель. Если d равно нулю, машина вращается, но передача энергии не происходит. Обратите внимание, что Sin ( d) максимизируется при 90 o . Это предел угла опережения ротора, относящийся к теоретическому максимальному крутящему моменту, который способна обеспечить машина.
Вот механическая аналогия синхронной машины, которая может помочь. Представьте себе магнитный момент между ротором и статором в виде пружины, соединяющей два вращающихся колеса. Первое колесо связано с источником движения, т.е. с ротором. Второе колесо представляет нагрузку на энергосистему. Когда ко второму колесу прикладывается дополнительная нагрузка, угол между колесами начинает увеличиваться по мере растяжения пружины. Через растянутую пружину передается больший крутящий момент, а кинетическая энергия переходит от непосредственно связанной вращающейся массы первого колеса ко второму.
Когда ко второму колесу прикладывается дополнительная нагрузка, угол между колесами начинает увеличиваться по мере растяжения пружины. Через растянутую пружину передается больший крутящий момент, а кинетическая энергия переходит от непосредственно связанной вращающейся массы первого колеса ко второму.
Асинхронная машина
Как и следует из названия, основное различие между асинхронными и синхронными машинами заключается в синхронности ротора. Ротор асинхронного генератора работает не синхронно с напряжением сети. Асинхронная машина работает со «скольжением». «Скольжение» — это процентная мера того, насколько медленнее или быстрее работает ротор по сравнению с его синхронной скоростью. Когда ротор вращается медленнее, чем синхронная скорость, машина действует как двигатель. Когда ротор вращается быстрее, чем синхронная скорость, машина действует как генератор.
Вот механическая аналогия асинхронной машины, которая может помочь. Представьте себе магнитный крутящий момент между ротором и статором как гидравлическую муфту между двумя колесами. Первое колесо связано с источником движения, т.е. с ротором. Второе колесо представляет силовую систему. Поскольку ко второму колесу прикладывается дополнительная нагрузка, гидравлическая муфта проскальзывает больше, но поток кинетической энергии от первого колеса в значительной степени разделяется гидравлической муфтой.
Первое колесо связано с источником движения, т.е. с ротором. Второе колесо представляет силовую систему. Поскольку ко второму колесу прикладывается дополнительная нагрузка, гидравлическая муфта проскальзывает больше, но поток кинетической энергии от первого колеса в значительной степени разделяется гидравлической муфтой.
Асинхронные генераторы обычно используются там, где невозможно управление первичным двигателем, как правило, это ветряные турбины или речные гидроэлектростанции. Хотя системы управления реализованы так, чтобы наилучшим образом использовать эти ресурсы, они не могут регулировать выходную мощность в ответ на изменение частоты. (Некоторое увеличение может быть возможно, если генератор был намеренно настроен неоптимально, например: чтобы получать от ветра меньше энергии, чем потенциально доступно. Это делается для того, чтобы по команде машина могла скорректировать настройки и тем самым увеличить потребление энергии от источника).
Резюме
Существуют два ключевых различия, влияющих на их вклад в стабильность.
- Кинетическая энергия ротора синхронной машины тесно связана с энергосистемой и поэтому доступна для немедленного преобразования в мощность. Кинетическая энергия ротора асинхронной машины отделена от системы из-за его проскальзывания и, следовательно, не может быть легко доступна системе.
- Синхронные генераторы управляются регуляторами, которые контролируют системную частоту и регулируют вход первичного двигателя, чтобы внести коррективы в изменения частоты. Асинхронные генераторы обычно используются в приложениях, где источник энергии не поддается контролю, например: ветряные турбины. Эти генераторы не могут реагировать на изменения частоты, представляющие энергетический дисбаланс системы. Вместо этого они являются причиной энергетического дисбаланса.
Кратковременная стабильность
Кинетическая энергия вращения роторов синхронных машин измеряется в мегаватт-секундах. Синхронные машины обеспечивают устойчивость при дисбалансах энергосистемы, поскольку кинетическая энергия их роторов (и первичных двигателей) заперта синхронно с сетью за счет магнитного поля между ротором и статором.