Как число пар полюсов асинхронного двигателя
Содержание
- 1 Общие ведомости
- 2 Полюса
- 3 Регулировка скорости работы мотора
- 3.1 Группирование соединений
- 3.2 Условное сравнение схем
- 4 Определение точного количества
- 4.1 3000 оборотов
- 4.2 1,5 тысячи вращений
- 4.3 1000 вращений
- 4.4 750 об/мин
- 4.5 500 оборотов
- 5 Вывод
Определение числа пар полюсов в асинхронном электродвигателе активно реализуется, независимо от среды использования силовых агрегатов. Это помогает определять точное количество операций, для которых используется мотор и контролировать его ресурс. Обо всех особенностях мы напишем далее.
Асинхронный двигатель с экранированными полюсами
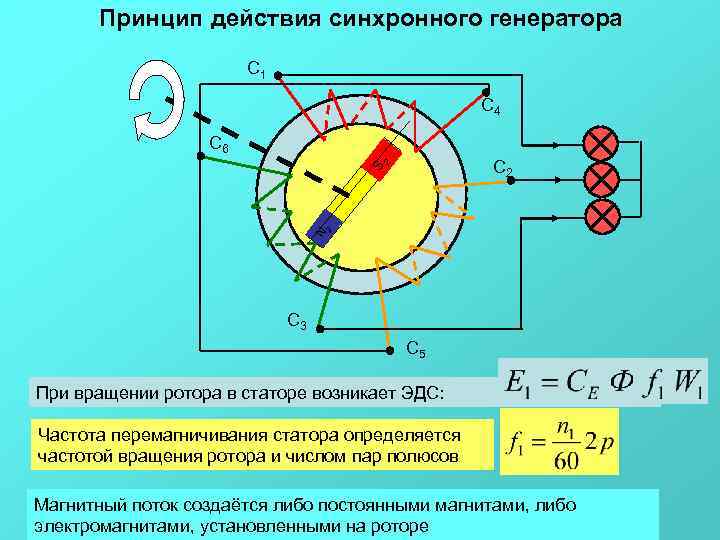
Асинхронный силовой агрегат представляет собой устройство, основное назначение которого – преобразовывать электрическую энергию в механическую, которая и приводит в движение рабочие компоненты оборудования. При этом, частота оборотов статорного магнитного поля по умолчанию больше аналогичного показателя ротора. Интенсивность вращения вала такого силового агрегата напрямую определяется количеством полюсов медной намотки. Данный показатель является одним из важнейших, определяющих функционирование мотора. Далее в статье мы расскажем об определении точного числа точек у моторов с асинхронным вращением ротора и статора.
При этом, частота оборотов статорного магнитного поля по умолчанию больше аналогичного показателя ротора. Интенсивность вращения вала такого силового агрегата напрямую определяется количеством полюсов медной намотки. Данный показатель является одним из важнейших, определяющих функционирование мотора. Далее в статье мы расскажем об определении точного числа точек у моторов с асинхронным вращением ротора и статора.
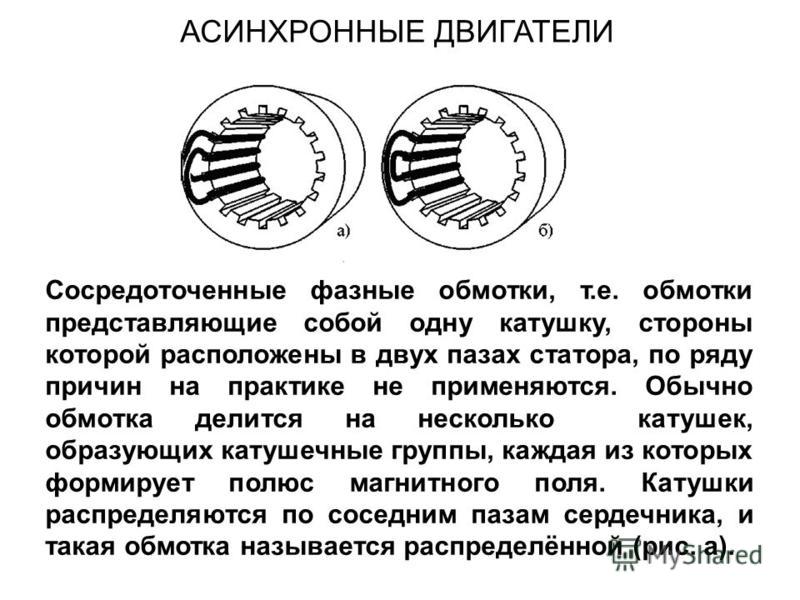
По сути, количество полюсов – это всегда четное число (из-за этого и проводится подсчет именно пар точек, а не отдельных элементов). В современных асинхронных электродвигателях реализуется два типа обмотки:
- сосредоточенная;
- распределенная.
Концентрированная обмотка подходит для бесщеточных двигателей. Вы можете легко изменить количество антиподов, изменив соединение катушек. Статор с шестью обмотками допускает два ключевых типа подсоединения. Один имеет месть на двух сторонах, второй – на четырех или восьми.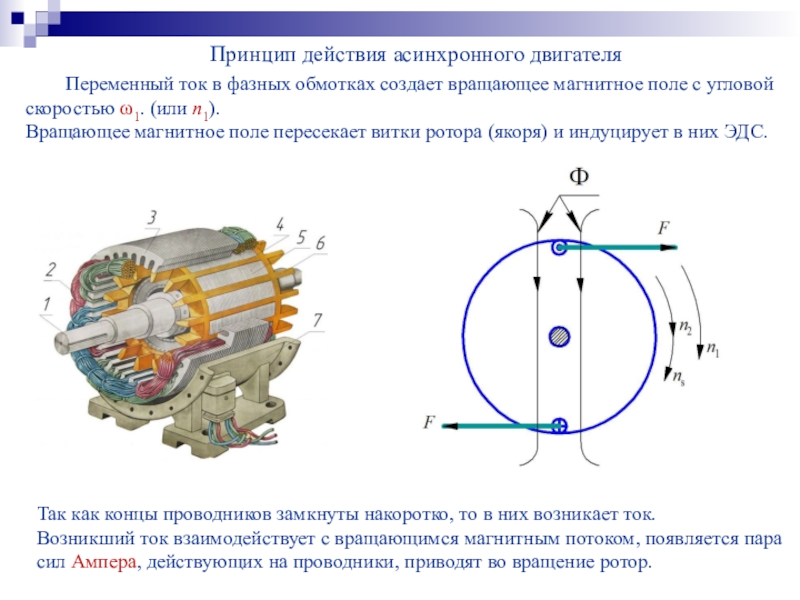 Однако менять количество полюсов готового двигателя на четыре или восемь неразумно. Распределенная обмотка, которая часто используется для обеспечения 12 точек статора с девятью пазами, подходит для асинхронных двигателей. В таком случае количество подбирается еще до начала запуска намотки мотора.
Однако менять количество полюсов готового двигателя на четыре или восемь неразумно. Распределенная обмотка, которая часто используется для обеспечения 12 точек статора с девятью пазами, подходит для асинхронных двигателей. В таком случае количество подбирается еще до начала запуска намотки мотора.
Хотя небольшие двигатели обычно имеют четыре антипода, двухполюсные двигатели также используются для высокоскоростных приложений, требующих 50 или 60 оборотов в секунду. До того, как были введены бесщеточные двигатели, когда-то использовалась методика изменения количества полюсов в асинхронных силовых агрегатах с короткозамкнутыми якорями. Основа метода предполагает изменение типа соединения сложных обмоток, которые нельзя классифицировать как распределенную катушку или концентрированную обмотку. Данный способ был попыткой разрешить работу на двух разных скоростях путем изменения синхронной скорости. Модели моторов витками такой разновидностью называют моторами с расщепленными сторонами.
Статор электродвигателя имеет сразу несколько пар катушек (р), которые подключаются к сетевому напряжению с определенным показателем частоты (f). В статоре создается намагниченное поле, которое в процессе работы вращается синхронно. Его рабочая скорость полностью соответствует частоте сети питания и рассчитывается по формуле ns = 60ф/п.
Это поле магнитного действия, вызывает напряжение в обойме ротора (которая представляет собой спрессованные листы, на которые нанесена медная или алюминиевая обмотка). Сгенерированный ток и поток магнитов вызывают вращения якоря. Если же ротор вращается с синхронной скоростью, он не будет вращаться по отношению поля, имеющего место в статоре. В якоре не будет индуцироваться напряжение, и сила, вращающая ротор, уменьшится.
Поэтому вал асинхронных двигателей всегда вращается с асинхронной скоростью относительно оперативности статорного МП. Отличия между этими скоростными данными называются скольжением, которое обычно варьируется в диапазоне от 3 до 5%.
Разница по сравнению с синхронной скоростью напрямую зависит от типа конструкции мотора, его эффективности. Далее мы все эти пункты рассмотрим подробнее.
Асинхронный двигатель с экранированными полюсами схема
Регулировка скорости работы мотораМногие задаются вопросом: — Для чего необходимо обладать информацией о количестве пар полюсов? Первое, что отличается удобством выполнения при помощи этих данных – это регулирование скорости вращений в асинхронном двигателе.
В современных производственных отраслях применяется довольно широкий перечень промышленного оборудования, выполняющего определенные задачи. При этом, нет необходимости обеспечивать плавность регулировки скорости оборотов, достаточно обладать ограниченным перечнем скоростей (только самых важных, чаще всего используемых). К такого типа агрегатам относятся станки в металлообрабатывающей и деревообрабатывающей отраслях, лебедки в добывающих скважинах, центробежных разделителях и др.
Лимитированное число рабочих скоростей оборотов с легкостью обеспечивается многоскоростными моторами короткозамкнутой конструкции (с экранированными полюсами). Здесь могут иметь место сразу две модификации такого оборудования:
- с одной статорной обмоткой, которая поддерживает функцию переключения, для реализации сразу разных пар полюсов;
- с несколькими намотками стационарного компонента, которые располагаются в одних и тех же пазах.
Взаимодействие роторной МДС со статорным элементом, реализуется только в ситуациях полного соблюдения равенства в количествах обмоточных пар этих двух компонентов. Именно поэтому, меняя количество полюсных пар на статоре, нужно обязательно поменять их и в роторе.
Если же имеет место асинхронный агрегат с якорем фазного типа, то для того, чтобы выполнить данное условие, необходимо иметь в наличии вспомогательных колец контактов. Эта особенность способствует увеличению внешних габаритов конструкции и, следственно стоимость.
Якорь короткозамкнутого регулирования с намоткой типа «беличья клетка» имеет в арсенале возможность автоматического генерирования набора пар, который будет равным такому же перечню, но уже со статорной движущей силой. Это качество обусловливает применение якорей коротких замкнутых в асинхронных моторах, работающих со многими скоростями.
Многоскоростные силовые агрегаты сразу с большим количеством катушек на статоре, уступают моделям с единой намоткой. Это выражается в бюджетном и технологическом плане. Устройства с множеством катушек слабо используют статорную обмотку, демонстрируют нерациональное использование пазов. Коэффициент полезного действия и cos ϕ на порядок ниже оптимальных показателей.
Эта важная особенность обусловливает то, что все чаще в производственной отрасли применяются электрические двигатели многоскоростного действия на 1 обмотку. Это выгодно, ведь агрегаты поддерживают переключение сразу на разный объем пар.
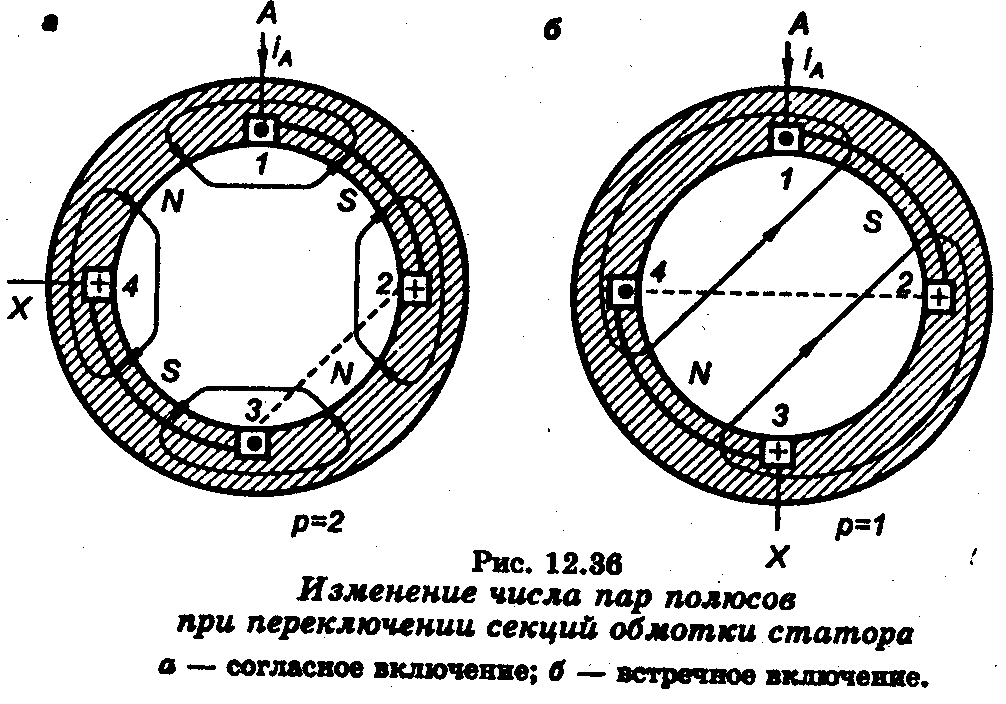
По сути, посредством переключения направленности движения токов в сфере намоток, параллельно меняют и способ работы с магнитодвижущими силами в середине статорной расточки. В результате получится измененная скорость оборотов МДС и, исходя из этого – непосредственно потока. Чаще всего применяется переключение в пропорции 1 к 2. Из этого следует, что намотки каждой из фаз создаются в форме двух сфер. Смена направления движения токов в какой-то из них дает возможность получать требуемое изменение объема полюсности вдвое.
В результате получится измененная скорость оборотов МДС и, исходя из этого – непосредственно потока. Чаще всего применяется переключение в пропорции 1 к 2. Из этого следует, что намотки каждой из фаз создаются в форме двух сфер. Смена направления движения токов в какой-то из них дает возможность получать требуемое изменение объема полюсности вдвое.
Для большей информативности, давайте приведем пример таких действий на двигателе, который переключается на 8 точек и 4.
Асинхронный двигатель намотка
Для более простого восприятия, мы взяли изображение намотки всего одной фазы, конструкция которой включает две секции.
Если реализовывать поочередное подсоединение секций – при подключении окончания первой (1К) со стартом другой (2Н), то в результате у нас будет 4 пары точек иле же просто 8 полюсов. Когда провести замену направленности перемещения тока в другой области на обратную, тогда количество полюсов, которые генерируются намоткой, уменьшится вдвое. Какие-либо вариации тока в среде 2Н можно провести посредством разрывания перемычки между секциями 1К и 2К.
Такая смена числа полюсов получается в результате изменения направленности электрического тока в секции №2, посредством применения слаженного запуска с первой. Это указано на изображении В. Здесь, также, как и в ранее описанной ситуации, намотка создает 4 полюса, что полностью отвечает вдвое большим показателям оборотов электрического агрегата.
Когда мы осуществляем сопоставление двух намоток в многоскоростных машинах, стоит преимущественно использовать те схемы, которые обеспечивают в процессе работы требуемый характер зависимостей показателей. К последним относятся момент, допустимый по нагреву от скорости. Схемы кроме всего прочего должны иметь самое малое количество выводов и контактных элементов.
Группирование соединений Опять таки для лучшего удобства, давайте введем критерий, с помощью которого можно будет легко и просто относить обмоточные соединения к определенной группе.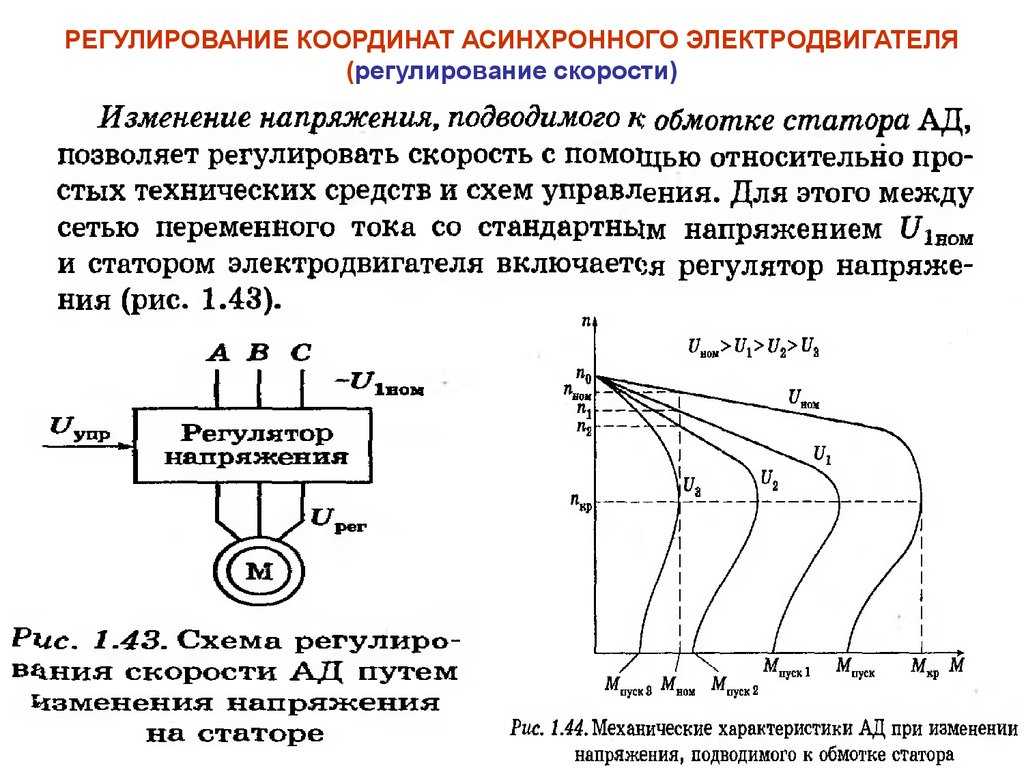
Формула момента
Условные обозначения:
- p – точное число полюсных пар в статорной намотке;
- N2 – точное количество стержней катушки якоря при реализации типа «беличья клетка»;
- I2 – уровень тока роторного стержня;
- Ψ2 – угол сдвигания тока векторного типа, по отношению к электродвижущей силе ротора;
- Ф – поток магнитного действия одной полюсной пары.
Исходя из условий нагревания ротора (если пренебрегаются условия вентилирования), ток (I2), работая с несколькими парами полюсов, должен всегда находиться на одном уровне. Косинус угла Ψ2 от холостого хода и до номинального момента должен быть максимально приближенным к показателю 1.
При тщательном соблюдении всех этих условий момент машины выражается таким равенством:
М = с1*Фр. (1)
(1)
Показатель С1 в свою очередь выражается другой понятной формулой:
Формула С1
Справедливости ради укажем формулу расчета электромагнитного момента, который измеряется в джоулях. (2)
Электромагнитный момент в джоулях
Приравняв два уравнения (1) и (2) мы получим такое значение Р, которое будет равняться 314 С1Ф.
Показатель мощности электромагнетизма силового агрегата при любом объеме полюсных обмотки статора, вычисляется при помощи соотношения напряжения элемента по фазам к количеству витков, которые находятся в фазной намотке и соединены последовательным способом.
Применяя данную особенность, можно с высокой долей точности проанализировать все описанные ранее методы переключения количества пар у полюсов. Давайте же посмотрим на изображения, в которых отображаются все ключевые случаи переключений с большого количества полюсных пар на меньшие. В нашей примерной ситуации это 8 полюсов на четыре.
Схемы переключения секций обмотки статора 8 и 4
Как можно видеть на схеме из рисунка А – все две секции являются обтекаемыми токами, движущимися в одном направлении.
Во всех этих случаях количество подключенных последовательным способом витков на обмотках 1 фазы остается на стабильном уровне. К ним дополнительно прилагается фазное напряжение, также на стабильно одинаковом уровне.
Исходя из всего вышеперечисленного, соотношение показателей мощностей в обоих случаях равняется 1, что указывает на работу со стабильным значением мощности (схематически – Р = константа). В этой ситуации для того, чтобы сохранить мощность на постоянном уровне, при изменении скорости на увеличенную вдвое, необходимо изменить показатель момента в обратной направленности его скорости.
Схематическое изображение переключения полюсов статорных катушек в пропорции 1:2
Принципиальная схема переключения полюсов обмотки статора в соотношении 1 к 2
Как можно видеть на графиках, подключение параллельного типа обмоточных секций позволяет изменять направление подачи тока в каждой из реализованных сфер. Данное значение отвечает за уменьшение числа пар. Вместе с этим, намотка создает сразу 2 звезды симметричного расположения, которые включаются на линейное напряжение. Применяя этот критерий, можно заметить, что когда осуществляется переход на увеличенную скорость оборотов, значение мощности увеличивается вдвое:
Данное значение отвечает за уменьшение числа пар. Вместе с этим, намотка создает сразу 2 звезды симметричного расположения, которые включаются на линейное напряжение. Применяя этот критерий, можно заметить, что когда осуществляется переход на увеличенную скорость оборотов, значение мощности увеличивается вдвое:
Значение мощности увеличивается вдвое
Данные показатели полностью соответствуют утверждению М = константа.
Условное сравнение схемЕсли проводит сравнительный анализ всех вышеописанных схем по отношению к требуемому количеству выходов и контактных элементов на управленческий аппарат, можно заметить несколько особенностей:
- при подключении при помощи принципиальной схемы, необходимо иметь как минимум 9 выводов и 12 контактов;
- схема переключения при подсоединениях секций, дает возможность уменьшать число выходов до шести, а контактных деталей до восьми.
Принципиальная схема переключения полюсов обмотки
Представленные схемы указывают, что на 2-х скоростях соединения намоток были использованы «звезды» параллельного или последовательного типа. Если возникает необходимость внести изменения в напряжение, которое поступает на однофазную намотку, следует использовать сопряжение катушек с применением схемы обыкновенного или сдвоенного треугольника. В отдельных ситуациях можно даже комбинировать способы звезда – треугольник. При выборе последнего варианта все 3 секции намоток создают треугольник, а остальные 3 — соединяются с вершинами фигуры, создавая «лучи» типа «звезда».
Если возникает необходимость внести изменения в напряжение, которое поступает на однофазную намотку, следует использовать сопряжение катушек с применением схемы обыкновенного или сдвоенного треугольника. В отдельных ситуациях можно даже комбинировать способы звезда – треугольник. При выборе последнего варианта все 3 секции намоток создают треугольник, а остальные 3 — соединяются с вершинами фигуры, создавая «лучи» типа «звезда».
Такие соединения активно применяются в приводах разнотипного оборудования, например, в прочных режущих станках. Также нередко модели используются в ситуациях, когда есть необходимость осуществить поочередное подключение треугольной схемой на 2 звезды, применяя параллельную компоновку.
Когда машина функционирует на малых вращениях, 2 секции каждой отдельной фазы, подключенные последовательным способом, создают линии треугольника, на углы которого осуществляется бесперебойная подача питания. В таком случае все сферы фазовой намотки окружаются током с одинаковыми показателями, что полностью совмещается с большим количеством пар.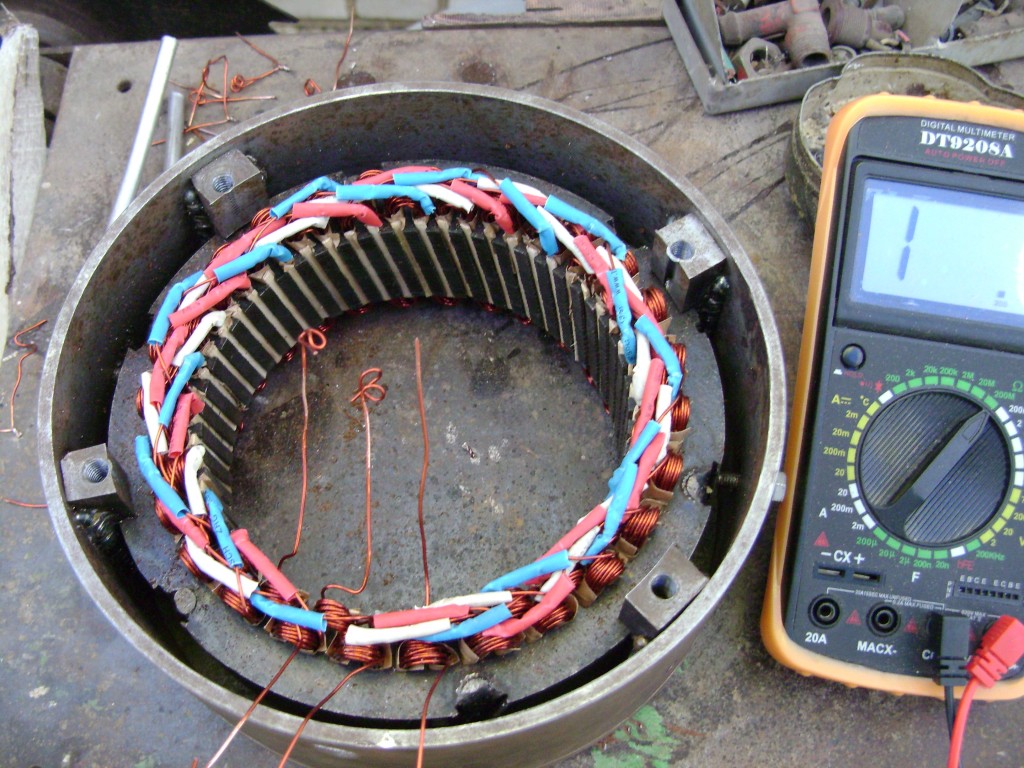
С целью получения больших скоростных значений верха треугольника, который получился путем обмотки фаз, необходимо замкнуть коротко, а кабели подачи питания перенести в усредненные точки подключения обмоточных секций для каждой отдельной фазы. Исходя из этого, будут иметь место 2 звезды, подключенные параллельно.
Перед тем, как начать своими руками изготавливать обмотки, стоит знать, что процесс создания многоскоростных однообмоточных решений на порядок сложнее, чем двухобмоточных. То, сколько полюсов необходимо реализовывать в моторе, определяет скорость и интенсивность вращения вала силового агрегата и, как следствие – его общую продуктивность.
Определение точного количестваВыше мы уже описали, как проводить регулировку скоростных показателей, используя число пар полюсов двигателя. А как самостоятельно определить точное количество данных пар?
Скорость оборотов мотора асинхронного типа в большинстве ситуаций интерпретируется как угловая частота оборотов его ротора. Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Трехфазные силовые агрегаты поддерживают возможность электропитания и от сетей с одной рабочей фазой, но для реализации такой идеи нужно подсоединить конденсатор. Осуществить это стоит не просто, а одновременно одной или нескольким его намоткам, ориентируясь на уровень напряжения сети питания. Принципиально на конструкцию двигателя это не повлияет.
Если в процессе работы ротор, находясь под нагрузкой за 1 минуту вращается 2760 раз, то его угловая частота будет равняться 289 радиан в секунду. Рассчитать это довольно просто:
2760 * 2пи/60рад.
Получившийся показатель является более техническим, неудобным для восприятия рядовым пользователем. Именно поэтому, рабочие показатели мотора указывают просто и понятно — в оборотах за одну минуту.
Уровень слаженной скорости такого мотора (без учета такого важного значения, как скольжение) равняется 3000 вращений. Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Далее мы рассмотрим о другом методе определения уровня скорости оборотов условного трехфазного агрегата, проведя визуальный осмотр статора. Оценивая внешний вид стационарной детали, расположение медных намоток и точное число пазов, возможно с легкость точно определить количество оборотов мотора. Особенно такая возможность полезна, если в наличии нет такого измерительного устройства, как тахометр.
3000 оборотовВ современной электронике указывается, что каждая определенная модель электродвигателя исходя из типа своей конструкции, имеет 1 – 4 пары полюсов.
Минимальный показатель – 1 пара, и, как следует — 2 полюса. На картинке видно, что статор включает по 2 намотки, которые по отдельности вложены в свой отдельный паз и поочередно подключена на всех фазах. Для каждой пары обмоток все они располагаются друг напротив друга. Они и образовывают по отдельной паре на стационарном элементе двигателя (статоре).
Для каждой пары обмоток все они располагаются друг напротив друга. Они и образовывают по отдельной паре на стационарном элементе двигателя (статоре).
3000 оборотов в минуту схема
Единая фаза для большей наглядности красная, вторая – зеленого цвета, а третья – черная. Все они устроены конструктивно одинаково. Питание данных намоток осуществляется последовательно, исходя из чего, за 1 удар (из 50 максимально возможных) магнитная череда совершит одно вращение по кругу (следовательно на 360˚). 1 оборот совершается за 1/50 долю секунды, а исходя из этого – 50 вращений осуществится за 1 сек. А 50 умножить на 60 и выйдет 3000 об./мин, о чем уже писали ранее.
Нетрудно догадаться, что для точного подсчета количества синхронных вращений силовго агрегата, достаточно подсчитать пары полюсов мотора. Это осуществляется достаточно просто – открыванием крышки и оценкой статора.
В целом, сумму статорных пазов необходимо поделить на разъемы, которые относятся к каждой отдельной секции намотки одной из выбранных фаз. Если в результате расчетов получается 2, тогда двигатель включает 2 полюса, то есть число пар – одна. Исходя из этого, частота синхронных вращений составляет 3 тысячи за 1 минуту, но, учитывая скольжение, этот показатель становится 2910 об/мин. Самая простая модификация имеет 12 пазов, для каждой катушки по шесть разъемов. Таких намоток также 6 – по 2 на каждую отдельную из имеющихся тех фаз.
Если в результате расчетов получается 2, тогда двигатель включает 2 полюса, то есть число пар – одна. Исходя из этого, частота синхронных вращений составляет 3 тысячи за 1 минуту, но, учитывая скольжение, этот показатель становится 2910 об/мин. Самая простая модификация имеет 12 пазов, для каждой катушки по шесть разъемов. Таких намоток также 6 – по 2 на каждую отдельную из имеющихся тех фаз.
Необходимо в процессе реализации также учитывать, что точное число катушек в единой группе для каждой пары не во всех ситуациях должно равняться единице, допустимые значения также 2 и 3. Для простоты восприятия мы указали именно этот, наипростейший вариант.
Рассмотрим же более простые вариации с меньшими мощностями, которые также активно применяются.
1,5 тысячи вращенийКак показывает практика, для достижения показателей скорости в 1500 оборотов за 1 минуту, необходимо увеличить в 2 раза число полюсов у статора. Это реализуется с целью, чтобы обеспечить за 1 удар из пяти десятков, поток магнитов произвел всего половину оборота, то есть на угол 180˚.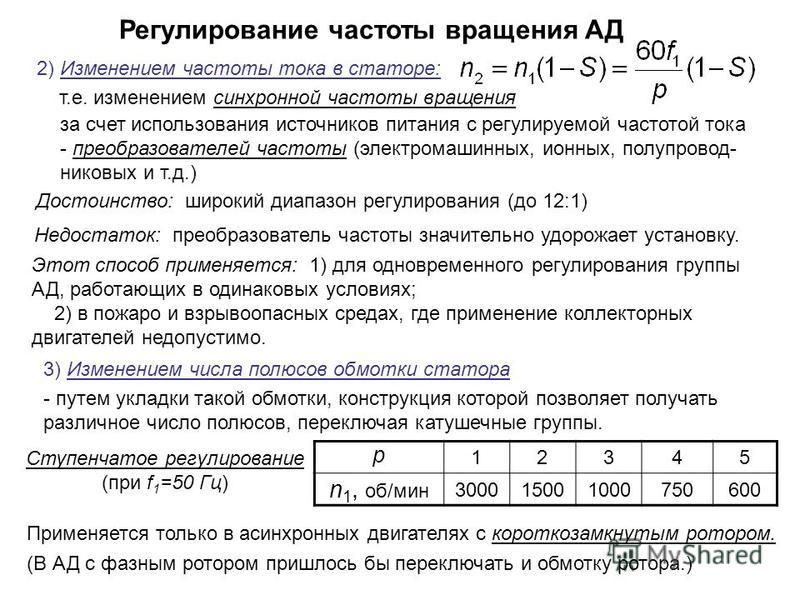
Первое, что реализовывают – это обеспечивают по 4 секции намоток. Исходя из этого, если одна медная катушка располагается на 1/25 от всех пазов, то можно уверенно говорить, что имеется дело с мотором на две пары полюсов. Образовываются такие пары при помощи 4-х катушек на каждую фазу.
Есть еще одна распространенная ситуация, при которой 6 разъемов и 24 принимают одну намотку (12 из 48), что также свидетельствует о том, что силовой агрегат имеет 1500 оборотов за 1 минуту. А если учитывать S – скольжение, то реальный уровень будет 1350 об/мин.
1000 вращенийЧтобы имела место этот уровень частоты вращений, нужно, чтобы все фазы по отдельности образовывали готовые 3 пары точек. То есть, за один удар на 50 Герц поток должен развернуться на 120˚ и далее повернуть якорь аналогичным образом.
Представим ситуацию, при которой мы имеем допустимое количество катушек – 18, которые при этом смонтированы на статоре и каждая отдельная эта деталь занимает 1/6 от общего числа всех пазов. Если число разъемов составляет 24, то каждая намотка занимает всего 4 из общего количества. Учитывая скольжение, можно утверждать, что оборотов за 60 сек. будет 935.
Если число разъемов составляет 24, то каждая намотка занимает всего 4 из общего количества. Учитывая скольжение, можно утверждать, что оборотов за 60 сек. будет 935.
Для того, чтобы получить показатель синхронной мощности на этом уровне, нужно одновременное формирование тремя статорными фазами четырех пар передвигающихся полюсов. Это означает, что каждая фаза включает 8 катушек, размещаемых напротив, итого – 8 полюсов.
Если конструкция включает 48 разъемов, тогда придется размещать по намотке на отдельный паз. Это – ключевой параметр мотора с рабочими вращениями 750 за минуту, а при учете скольжения – 730.
500 оборотовЧтобы получить силовой агрегат асинхронного типа с самым малым показателем мощности в 500 об/мин. С этой целью нужно иметь 6 полюсных пар, всего 12 катушек на 1 фазу. Это обеспечивает поворот магнитного потока на угол 60˚. Если конструкция статора включает 36 разъемов, на каждую намотку полагается 4 паза. Именно эти признаки напрямую указывают на асинхронный мотор с 500 вращениями за минуту. С учетом проскальзывания показатель составляет 480 об./мин. – реальное значение вращения.
С учетом проскальзывания показатель составляет 480 об./мин. – реальное значение вращения.
Порядок синхронных частот для силовых агрегатов асинхронного действия устанавливается и регулируется ГОСТом 10683-73. Согласно ему, количество оборотов мотора классифицируется на вышеописанные значения. Полюса напрямую определяют эту величину, поэтому, выбор машины стоит осуществлять, ориентируясь на точки управляющего прибора.
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор.
 Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя. - — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
 Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления | Торцевые уплотнения, причины выхода со строя в насосах →
Регулирование угловой скорости асинхронного электродвигателя изменением числа пар полюсов на статоре
Переключение — число — пары — полюс
| Механические характеристики двухскоростного асинхронного двигателя. |
Переключение числа пар полюсов достигается изменением схемы соединения статорной обмотки. Роторы многоскоростных двигателей выполняются короткозамкнутыми. На рис. 3 — 18 приведены механические характеристики двухскоростного двигателя. Переход с высшей скорости вращения на низшую при переключении числа пар полюсов, как показано на графике, сопровождается торможением с отдачей энергии в сеть. Механические характеристики сохраняют свою жесткость при переходе с одной скорости вращения на другую.
Схема реверсирования трехфазного, асинхронного электродви гателя. | Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. | Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. |
Переключение числа пар полюсов асинхронных электродвигателей обеспечивает ступенчатое регулирование частоты вращения, жесткие механические характеристики и отличается экономичностью.
Переключение числа пар полюсов асинхронного электродвигателя дает ступенчатое регулирование скорости вращения, жесткие механические характеристики и отличается экономичностью.
Путем переключения числа пар полюсов можно изменять частоту вращения только большими ступенями, например: 3000, 1500, 1000, 500 об / мин. Возможность изменения числа пар полюсов в одном двигателе достигается усложнением его устройства, увеличением размеров и значительным повышением стоимости. Поэтому многоскоростные двигатели строят не более чем на четыре скорости.
Переключение числа полюсов при различном соединении секций.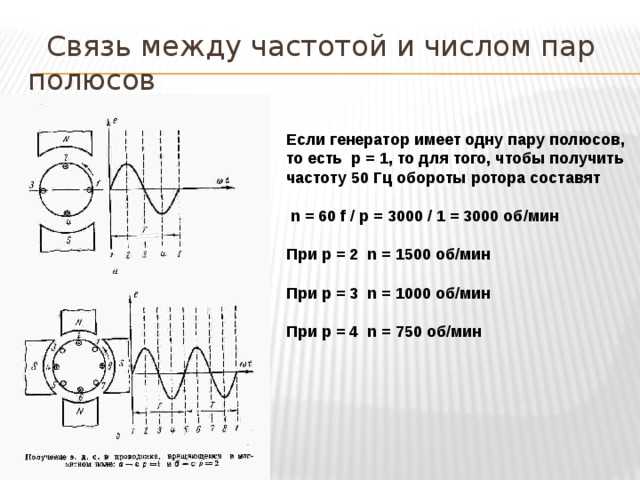 | Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды.| Переключение обмоток с треугольника на двойную звезду. | Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды.| Переключение обмоток с треугольника на двойную звезду. |
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, б — два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно.
Регулирование переключением числа пар полюсов является сравнительно простым способом, не требующим больших капитальных затрат. Экономичность регулирования весьма высока. Скорость при регулировании меняется не плавно, а ступенями. Уменьшение синхронной скорости ниже 300 — 375 об / мин обычно не производится, так как оно приводит к значительному увеличению габаритов двигателей.
Процесс регулирования скорости электродвигателя. |
Электродвигатели с переключением числа пар полюсов поля статора изготовляются на две, три и четыре скорости.
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора.
| Схема включения тепловых реле в обмотку статора двигателя, пуск которого осуществляется переключением звезды на треугольник. а-соединение в зоезду. b — в треугольник. |
У двигателей с переключением числа пар полюсов случается, что токи в подводящей линии и в самой обмотке при разной скорости вращения ротора значительно отличаются друг от друга.
Получение пониженной скорости путем переключения числа пар полюсов осуществляется в многоскоростном двигателе; при этом величина рабочей скорости определяется известным рядом синхронных скоростей: 3000, 1 500, 1 000, 750 и 500 об / мин. Двигатели со скоростями, меньшими 500 об / мин, редко изготовляются, следовательно, начальная скорость перед окончательным торможением может быть снижена максимум в 6 раз.
Двигатели со скоростями, меньшими 500 об / мин, редко изготовляются, следовательно, начальная скорость перед окончательным торможением может быть снижена максимум в 6 раз.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,. Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения. Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34). Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным
Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя
Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя
Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной
В этом случае направление передачи мощности скольжения меняется на противоположное.
- Назад
- Вперёд
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя.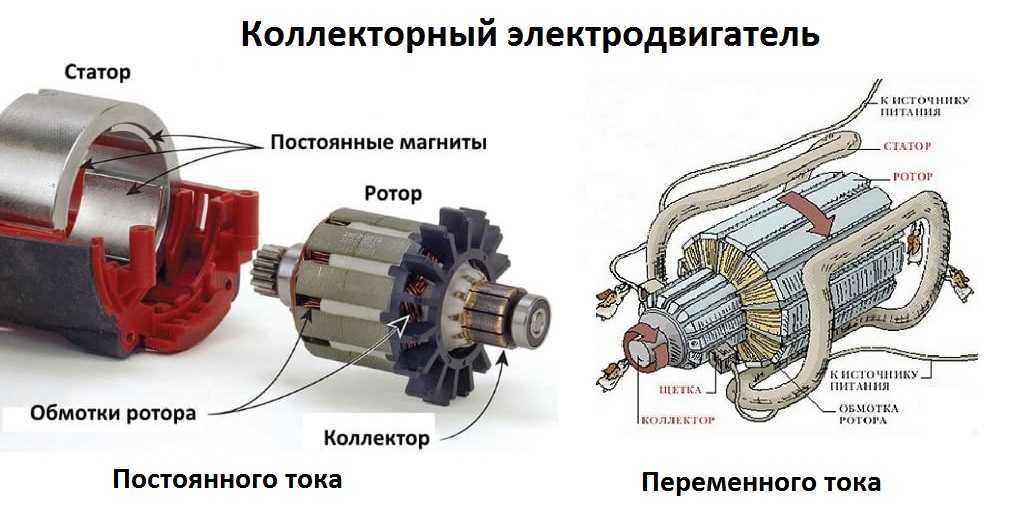 Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.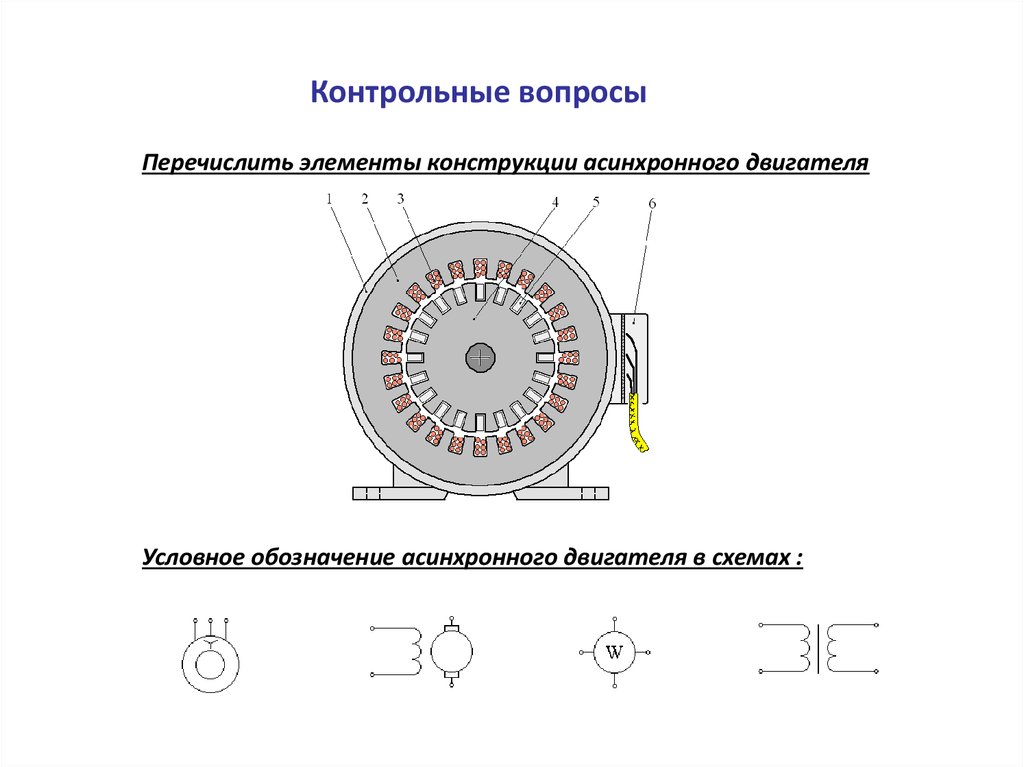
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Раздел недели: Обезжиривающие водные растворы и органические растворители. Составы для очистки и обезжиривания поверхности. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Поиск на сайте DPVA Поставщики оборудования Полезные ссылки О проекте Обратная связь Ответы на вопросы. Оглавление Таблицы DPVA.ru — Инженерный Справочник | Адрес этой страницы (вложенность) в справочнике dpva. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Коды баннеров проекта DPVA.ru Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления.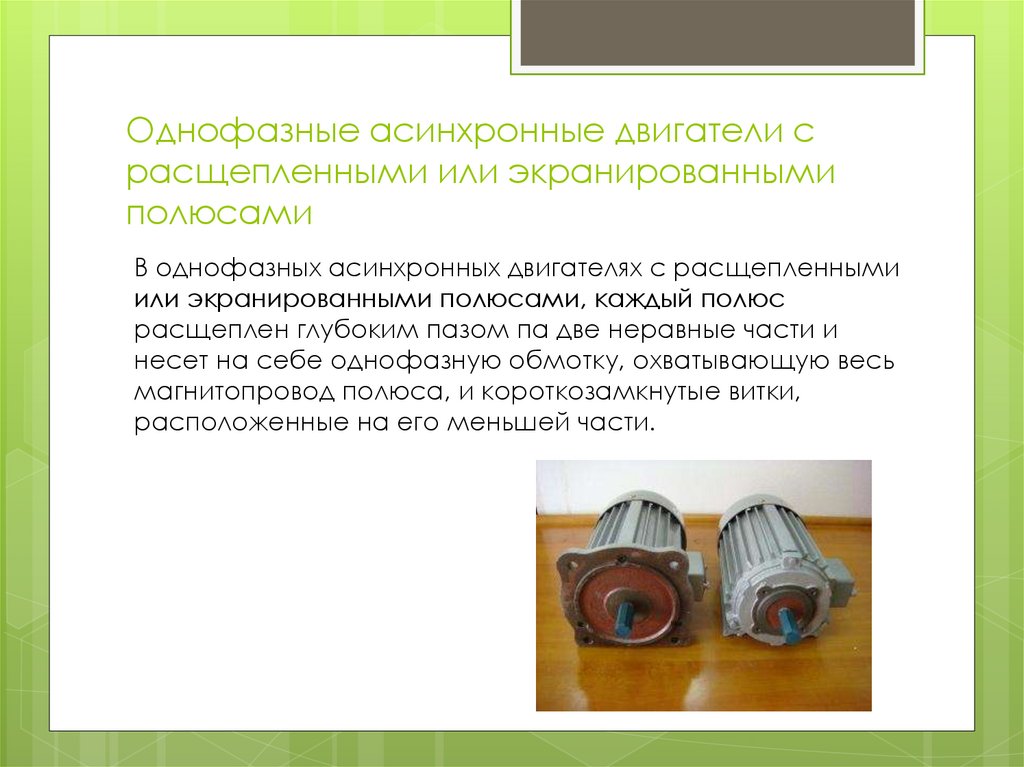 Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.
Free xml sitemap generator Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.
Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
подключение, выбор мощности, частоты вращения.
Применение асинхронных двигателей
Асинхронные двигатели являются самым распространенным видом электрических машин, применяющихся в различных отраслях промышленности, транспорта, ЖКХ, предприятиях торговли, складских помещениях и т.д.
В диапазоне мощностей от десятков ватт и до сотен киловатт их парк составляет более 90% от всех других типов двигателей.
Их основными достоинствами являются простота конструкции, надежность, высокая перегрузочная способность, экономичность, низкий уровень шума, невысокая стоимость.
Принцип действия, технические параметры
Работа трехфазного асинхронного электродвигателя (АД) основана на том, что вращающийся в воздушном зазоре магнитный поток наводит в стержнях ротора взаимодействующий с ним вторичный ток.
В результате этого взаимодействия возникает электромагнитный момент, увлекающий за собой ротор. Величина момента пропорциональна векторному произведению значений тока и потока.
Определения технических характеристик АД приведены в Таблице 1.
Таблица 1
Наименование | Обознач. | Примечание |
Номинальное напряжение питания |
Uн, В | Линейное напряжение. В соответствии с ГОСТ 31606-2012 значения Uн соответствуют ряду 220, 230, 380, 400, 660 и 660 В;
|
Обороты холостого хода | n0, об/мин | Обороты
холостого хода, или синхронная частота вращения. В зависимости от количества
полюсов обмотки статора она может быть равна 500, 600, 750, 1000, 1500 и
3000об/мин. n0 вычисляется по формуле: n0 = 3000/P, где P – число пар полюсов. |
Номинальные обороты | nн, об/мин | Номинальные обороты — частота вращения ротора при номинальной нагрузке |
Номинальный ток | Iн, А | Линейный ток двигателя, потребляемый из сети при номинальной нагрузке |
Пусковой ток | Iп, А | Ток в начале пуска двигателя при заторможенном роторе |
Номинальный момент | Мн, нм | Номинальный момент двигателя |
Пусковой момент | Мп, нм | Момент двигателя в начале пуска при заторможенном роторе |
Критический момент | Мк, нм | Максимально возможный момент, развиваемый двигателем |
Вследствие нелинейности механической характеристики асинхронных двигателей всегда выполняется условие: Мк > Мн > Мп.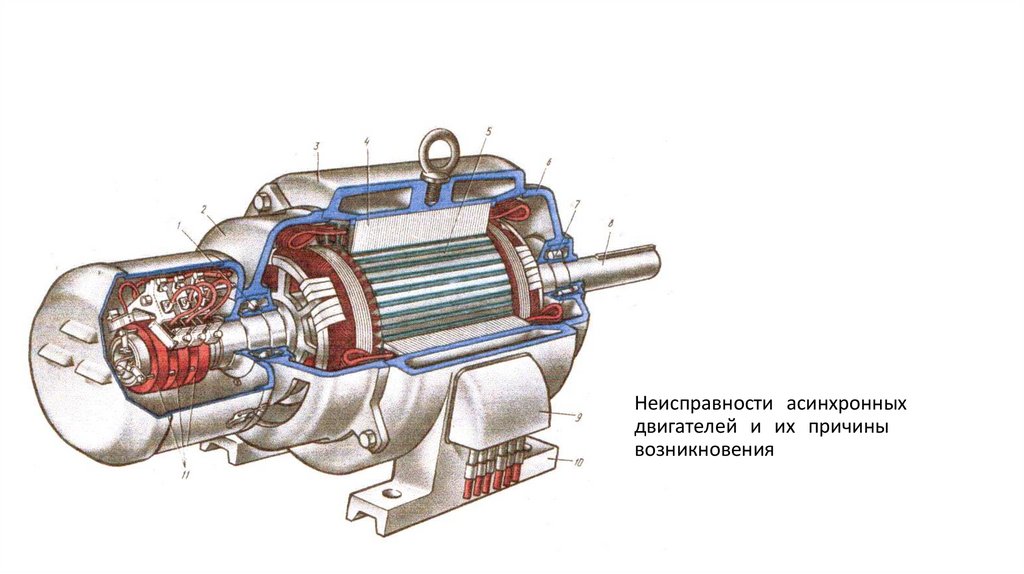
Маркировка обмоток
Концы статорных обмоток выводятся на резьбовые зажимы коробки выводов.
Начала и концы обмоток фаз А, В, С обозначаются буквами U1 – U2, V1 – V2, W1 – W2 соответственно.
До принятия современных обозначений буквами латинского алфавита применялась маркировка С1 — С4, С2 – С5, С3 – С6, Рис. 1а), которая часто встречается и поныне.
Для соединения обмоток в треугольник нужно соединить их выводы в соответствии с Рис.1в), а для соединения обмоток электродвигателя звездой с Рис.1б).
Рисунок 1
АД могут иметь следующие номинальные значения напряжений: 127/220- D/Y, 220, 220/380- D/Y, 230/400-D/Y, 380, 380/660- D/Y, 690 В. Маркировка D означает треугольник, Y — звезду.
Все номинальные данные наносятся на шильдик и указываются в паспорте.
Рисунок 2
Присоединение электродвигателей к сети питания
Возможные сочетания схем обмоток и напряжений питания приведены в Таблице 2.
Таблица 2
Таблица 2
Линейное напряжение сети, Uc, В | 127 | 220, 230 | 380, 400 | 660, 690 | |||||
Напряжение двигателя Uн | 127/220 | 127/220
| 220 | 220/380 230/400 | 220/380 230/400 | 380
| 380/660
| 380/660
| 660 |
Соединение обмоток | D | Y | * | D | Y | * | D | Y | * |
ПРАВИЛО: Если Uс равно числителю дроби (220/380), обмотки соединяются в D, если знаменателю – в Y.
* ПРИМЕЧАНИЕ: Если на шильдике выбито 220, 380 или 690 В, то это означает, что обмотки уже соединены на заводе-изготовителе по схеме, соответствующей указанному напряжению.
Допускается работа АД на пониженном напряжении: можно вместо 380В подать 220В, но нужно иметь в виду, что электромагнитный момент снизится в три раза.
ВНИМАНИЕ! На повышенное напряжение двигатель подключать категорически нельзя, так как из-за насыщения магнитной цепи уменьшится индуктивное сопротивление статорных обмоток, а это приведет к недопустимому возрастанию потребляемого тока и перегреву двигателя.
На практике часто встречаются двигатели, у которых отсутствует шильдик, или он поврежден так, что надписи на нем неразличимы.
В этом случае можно экспериментально определить номинальные параметры: мощность, ток и частоту вращения.
Работу нужно проводить в такой последовательности:
а) при отсутствии маркировки мультиметром прозвонить выводы обмоток каждой фазы и измерить их омическое сопротивление: сопротивления должны быть одинаковыми;
б) мегомметром измерить сопротивление изоляции обмоток относительно корпуса: оно не должно быть меньше 0,5 МОм;
в) по габаритным размерам с помощью справочников по электрическим машинам определить предварительно номинальную мощность электромотора;
г) соединить начала и концы статорных обмоток по схеме Y и подключить мотор к сети через автоматический выключатель с электромагнитной защитой;
д) убедиться, что он вращается без гула, механических вибраций и не греется.
Затем токоизмерительными клещами измерить ток холостого хода Iхх, а с помощью тахометра количество оборотов вала в минуту.
Ток холостого хода примерно равен 40% от номинального – отсюда можно вычислить Iн и уточнить мощность: Iн = 2,5Iхх
Двухступенчатый пуск
Этот способ применяется при включении мощных электроприводов с инерционной нагрузкой, обладающей большими маховыми массами, чтобы уменьшить нагрузку на питающую линию.
На первой ступени на статор, соединенный в Y, подается напряжение сети, равное номинальному для D. Например, двигатель с Uн = 380/660- D/Y подключается к сети 380 В.
После разгона до установившейся скорости, обмотка переключается на D, что соответствует номинальному режиму работы.
Силовая схема такого электропривода приведена на Рис.3.
В начале схема управления включает пускатели К1и К3, происходит соединение в звезду. Через время, отведенное на запуск, К3 отключается, включается К2, происходит переключение на треугольник.
Рисунок 3
Работа электродвигателя от одной фазы
Такая необходимость возникает чаще всего в быту, при использовании двигателя в качестве электропривода пилорамы, насоса для полива огорода, электроподъемника и т.д.
Необходимый временной сдвиг фазных токов достигается включением последовательно с одной из обмоток рабочего конденсатора Сраб, Рис.4.
За счет того, что магнитное поле при этом будет не круговым, а эллиптичным, полезная мощность уменьшится примерно на 20 — 30% от номинальной.
Для увеличения пускового момента при работе от однофазной сети на время разгона подключается дополнительный пусковой конденсатор Сп.
Оставлять его постоянно включенным нецелесообразно, так как из-за резонансных явлений возможно увеличение напряжения на емкости до недопустимо больших пределов.
Ориентировочно емкость рабочего конденсатора можно рассчитать из следующего выражения:
1) Для треугольника Сраб = 4500хIн/Uс, мкФ
2) Для звезды Сраб = 2500хIн/Uс, мкФ
Величина пусковой емкости рассчитывается как Сп = Сраб (2 – 3).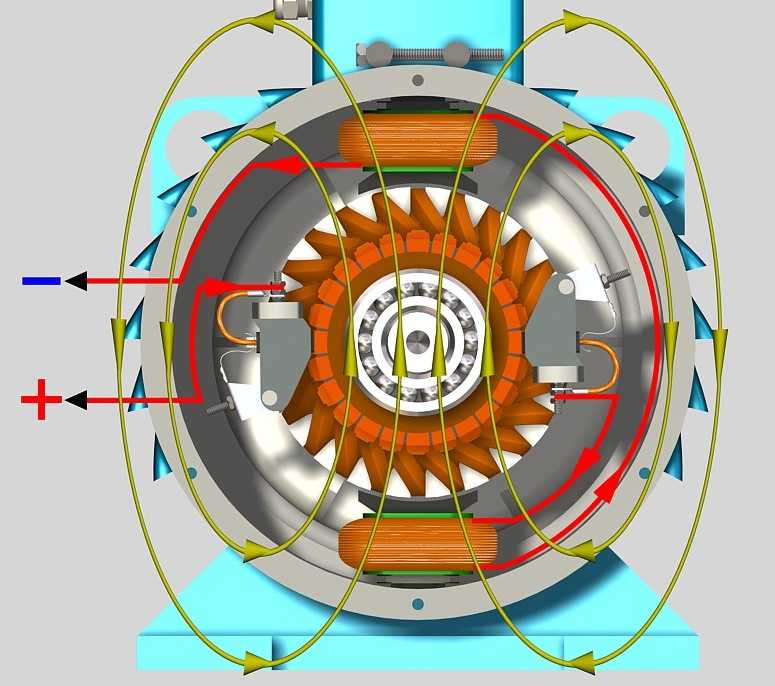
Рабочее напряжение конденсаторов должно быть не менее 400 В.
В качестве емкостей рекомендуется применять бумажные конденсаторы типа МБГО, МБГВ и т.д, категорически нельзя использовать полярные (электролитические) – они просто раздуются и разорвутся.
Рисунок 4
Типовая схема включения
В релейно-контакторных схемах управления электроприводами широко используются включение электродвигателя через магнитный пускатель, Рис.5.
Магнитный пускатель представляет собой электромагнитное реле, снабженное мощными силовыми контактами с повышенной коммутационной способностью.
Они выпускаются в шести габаритах, в зависимости от мощности и характера электрической нагрузки.
Наиболее распространены пускатели типов ПМ, ПМА, ПМЛ с контактами, рассчитанными на токи от 6,3 до 250 А.
Для защиты электрических цепей от перегрузки и коротких замыканий служат автоматические выключатели.
Наиболее распространенные из них ВА-47, Ва-21 выпускаются в одно, двух, трех и четырех полюсном исполнении.
При выборе пускателей и выключателей нужно соблюдать следующие основные правила:
- номинальное рабочее напряжение должно быть равно или больше сетевого;
- контакты аппаратов должны выдерживать включение и выключение силовых цепей в рабочих и аварийных режимах.
- должна быть предусмотрена защита двигателя от перегрузки и коротких замыканий.
Также для управления электроприводами применяются различные комплектующие: промежуточные реле и реле времени, реле тепловой и максимальной защиты, кнопки, переключатели, сигнальные лампы, предохранители и т.п.
Рисунок 5
Выключатель АВ1 подает питание в схему и на силовые контакты КМ1. Пуск двигателя Д производится кнопкой Пуск, отключение кнопкой Стоп. При токовой перегрузке срабатывает реле тепловой защиты КК и отключает пускатель КМ.
Реверс электропривода
Для изменения направления вращения в коробке выводов следует перебросить два любых сетевых провода.
На Рис. 6 изображена простейшая схема реверса.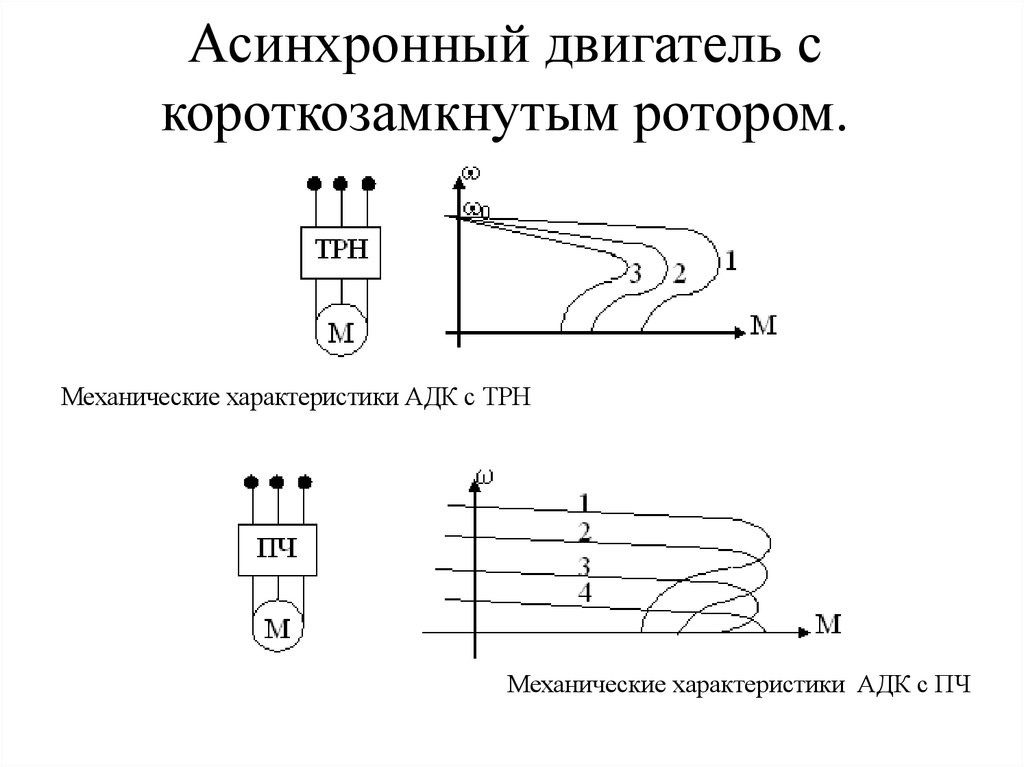
Рисунок 6
Кнопкой SB2 включается пускатель KM1, который своими контактами KM1 подает на электромотор М напряжение прямой последовательности: А, В, С. Чтобы изменить направление вращения нужно кнопкой SB1 отключить KM1, затем кнопкой SB3 включить KM2, при этом последовательность чередования фаз изменится на обратную: С, В, А.
На Рис. 7 показана схема реверса двигателя, работающего от однофазной сети.
Переключателем SA меняется полярность подключения одной из фаз.
Рисунок 7
Регулирование частоты вращения асинхронных двигателей
Существует несколько способов регулирования:
- изменением напряжения питания;
- применением многоскоростных АД;
- регулированием частоты питающей сети
Снижением напряжения питания можно добиться небольшого уменьшения оборотов – не более, чем на 10 – 15%. Недостаток способа: малый диапазон регулирования и повышенный нагрев обмоток. В настоящее время он практически не применяется.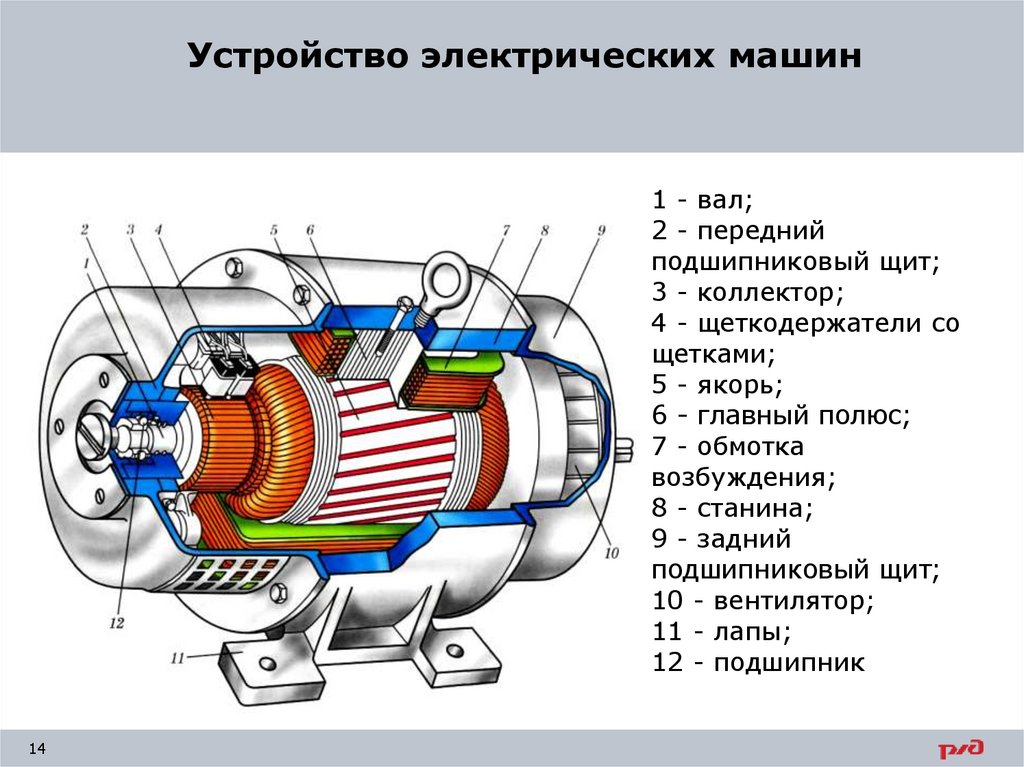 Существуют двух и трехскоростные АД, у которых переключением катушек статора изменяется количество пар полюсов от 1 до 3. Меняя количество полюсов можно ступенчато устанавливать требуемые обороты: например, 3000, 1500, 1000 об/мин. Наилучшим и самым экономичным способом является регулирование оборотов при помощи частотного преобразователя (ПЧ).
Существуют двух и трехскоростные АД, у которых переключением катушек статора изменяется количество пар полюсов от 1 до 3. Меняя количество полюсов можно ступенчато устанавливать требуемые обороты: например, 3000, 1500, 1000 об/мин. Наилучшим и самым экономичным способом является регулирование оборотов при помощи частотного преобразователя (ПЧ).
Типовые технические характеристики ПЧ:
- питающая сеть – одна или три фазы: 220, 400, 690 В
- выходная мощность от 0,1 до 600 кВт;
- выходное напряжение – 220, 380, 690В;
- выходная частота – от 1 до 200 Гц.
ПЧ широко применяются в электроприводах систем вентиляции, отопления, кондиционирования, станциях перекачивания, скважинных погружных насосов, установках полива растений, транспортных тележек, электроинструментов и т.д. За счет программной установки режимов плавного пуска и торможения исключаются ударные нагрузки на валы исполнительных механизмов. Кроме того, ПЧ позволяют значительно снизить энергопотребление и потери в электрических сетях за счет поддержания оптимальной производительности оборудования.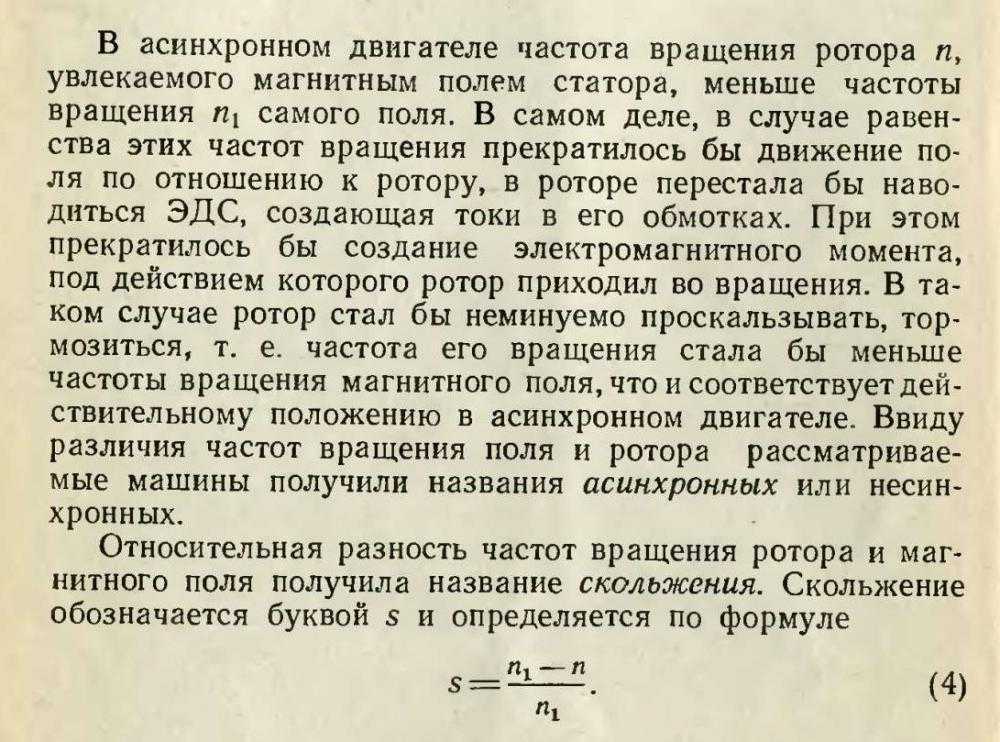
Заключение
В настоящей статье содержится первичная информация о принципах работы асинхронных электродвигателей. Изложенных сведений достаточно, чтобы самостоятельно производить монтаж и отладку электрооборудования любому человеку, не имеющему специальных знаний в области электротехники.
Какое число полюсов двигателя и как разделить число полюсов?
Перейти к основному содержанию
Кэнди ЧенКэнди Чен
zhejiang dagao electric motor co., ltd менеджер по экспорту
Опубликовано 11 августа 2022 г.
+ Подписаться
Количество полюсов двигателя — это количество магнитных полюсов, содержащихся в каждой фазе двигателя. Количество полюсов соответствует скорости вращения. Скорость вращения 2-полюсного составляет около 3000 об/мин, 4-полюсного — 1500 об/мин, а 6-полюсного — 750 об/мин.
Количество полюсов соответствует скорости вращения. Скорость вращения 2-полюсного составляет около 3000 об/мин, 4-полюсного — 1500 об/мин, а 6-полюсного — 750 об/мин.
Сколько полюсов в двигателе
«Число полюсов» трехфазного асинхронного двигателя — это число полюсов в указанном подполе. Обмотки статора соединены по-разному, что может формировать разное число полюсов магнитного поля статора. Количество полюсов, выбранных двигателем, определяется скоростью, требуемой нагрузкой, а количество полюсов двигателя напрямую влияет на скорость двигателя.
Скорость двигателя = 60 f/p, что в 60 раз больше частоты двигателя, деленной на количество пар полюсов двигателя. По формуле нетрудно заметить, что чем больше рядов, тем меньше скорость, а чем меньше число полюсов, тем выше скорость.
Каждый набор катушек трехфазного двигателя переменного тока генерирует N и S магнитных полюсов, а количество магнитных полюсов, содержащихся в каждой фазе каждого двигателя, является количеством полюсов.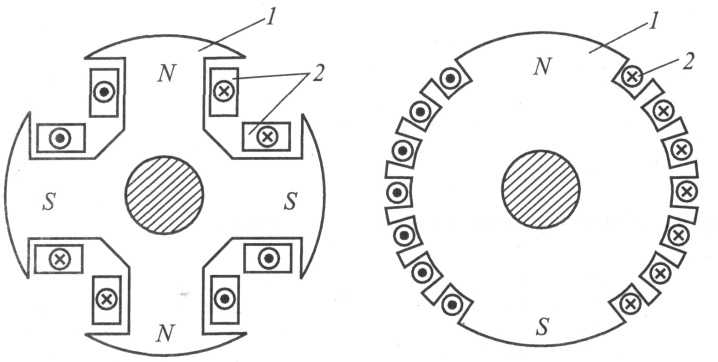 Поскольку магнитные полюса появляются парами, двигатель имеет 2, 4, 6, 8… полюсов. В Китае частота сети составляет 50 Гц, 2-полюсная синхронная скорость составляет 3000 об/мин, 4-полюсная синхронная скорость составляет 1500 об/мин, 6-полюсная синхронная скорость составляет 1000 об/мин, а 8-полюсная синхронная скорость составляет 1000 об/мин. полюсно-синхронная скорость 750 об/мин. Приход и уход обмоток может образовывать петлю, то есть количество пар магнитных полюсов, которые появляются парами, а под полюсами подразумеваются магнитные полюса. При прохождении тока по этим обмоткам будет создаваться магнитное поле, и будут соответствующие магнитные полюса. Ток двигателя зависит только от напряжения и мощности двигателя.
Поскольку магнитные полюса появляются парами, двигатель имеет 2, 4, 6, 8… полюсов. В Китае частота сети составляет 50 Гц, 2-полюсная синхронная скорость составляет 3000 об/мин, 4-полюсная синхронная скорость составляет 1500 об/мин, 6-полюсная синхронная скорость составляет 1000 об/мин, а 8-полюсная синхронная скорость составляет 1000 об/мин. полюсно-синхронная скорость 750 об/мин. Приход и уход обмоток может образовывать петлю, то есть количество пар магнитных полюсов, которые появляются парами, а под полюсами подразумеваются магнитные полюса. При прохождении тока по этим обмоткам будет создаваться магнитное поле, и будут соответствующие магнитные полюса. Ток двигателя зависит только от напряжения и мощности двигателя.
Как делится число полюсов двигателя?
Два полюса называются высокоскоростными двигателями, четыре полюса — двигателями средней скорости, шесть полюсов — низкоскоростными двигателями, а восемь или более полюсов — сверхнизкоскоростными двигателями.
Двухступенчатый 2800–3000 об/мин
Четырехступенчатый 1400–1500 об/мин
Уровень 6 900–1000 об/мин
Больше или равно восьми полюсам — меньше 760 об/мин.
Метод идентификации магнитного полюса
1. Посмотрите на скорость вращения, например, 1430 об/мин. Фактическая синхронная скорость вращения составляет 1500 оборотов. Согласно формуле скорости вращения: скорость вращения = время (60 секунд) и время; частота (50 Гц), деленная на количество пар магнитных полюсов. Пара магнитных полюсов состоит из 2 полюсов, поэтому вы можете рассчитать 3000÷1500=2 пары полюсов, что является 4-полюсным двигателем.
2. Более прямо смотреть на модель: например, модель двигателя Y 80 M- 4 Y → трехфазный асинхронный двигатель, а код названия продукта трехфазного асинхронного двигателя выглядит следующим образом: YR — асинхронный двигатель с обмоткой; YB — взрывозащищенный асинхронный двигатель; YQ — асинхронный двигатель с высоким пусковым моментом. 80→Высота центра основания (мм) M→Код длины основания 4→Количество магнитных полюсов.
3. Асинхронный двигатель начинается с YB, тип короткозамкнутого ротора — YR, тип повышенной безопасности — YA, а затем высота центра и количество полюсов, например, YR 400-4 560 6 кВ, высота центра асинхронный двигатель с короткозамкнутым ротором — 400 мм, количество полюсов — 4 полюса, номинальная мощность 560 кВт, номинальное напряжение 6 кВ.
Как определить количество полюсов двигателя
Если паспортная табличка утеряна и количество полюсов исходного асинхронного двигателя неизвестно, для проверки и оценки можно использовать текущий диапазон мкА мультиметра. В редукторе R×100 Ом из 6 выводов двигателя найдите два вывода любой однофазной обмотки. Затем поверните переключатель диапазонов мультиметра на текущий уровень мкА, а измерительные провода замените на зажимы типа «крокодил» и крепко зажмите два найденных выше вывода обмоток. Медленно и равномерно вращайте шкив или вал двигателя на один круг рукой и внимательно наблюдайте, сколько раз качается стрелка мультиметра.
Каждый раз, когда стрелка мультиметра качается, это означает, что ток в обмотке этой фазы изменяется один раз, так что можно определить количество пар полюсов в двигателе.
Этот метод заключается в использовании асинхронного двигателя, когда ротор вращается с постоянной скоростью, остаточный магнитный поток ротора разрезает обмотку статора и индуцирует небольшую индуцированную электродвижущую силу, которая генерирует ток и заставляет качаться мультиметровую стрелку .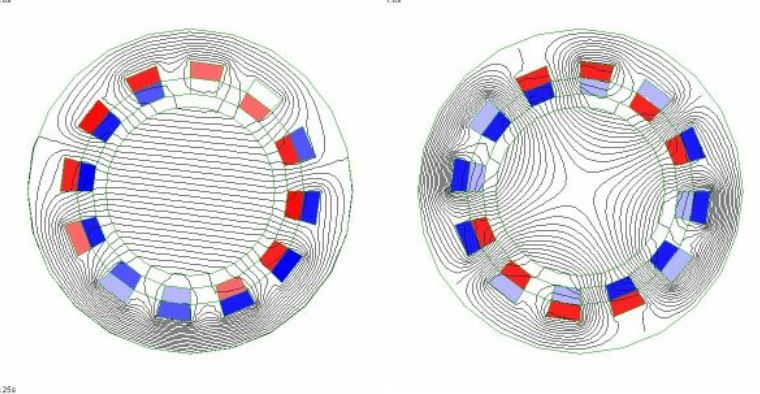
Стоит отметить, что при длительном неиспользовании двигателя стрелка мультиметра может не реагировать при тестировании вышеописанным методом. Это связано с тем, что остаточный магнетизм двигателя исчез. В это время, пока двигатель подключен к линии питания в соответствии с обычным методом, и двигатель находится под напряжением в течение нескольких минут, обмотка статора двигателя приобретет остаточный магнетизм после отключения питания, а затем количество полюсов можно определить вышеуказанным методом.
Крутящий момент двигателя, мощность, скорость, напряжение, формула преобразования тока, просто помните, что этого достаточно.
31 августа 2022 г.
Другие также смотрели
Исследуйте темы
Motors Basic — Основные принципы — Асинхронные двигатели переменного тока — Часть 2
Понимание основ электродвигателей жизненно важно для выбора правильного двигателя для правильного применения.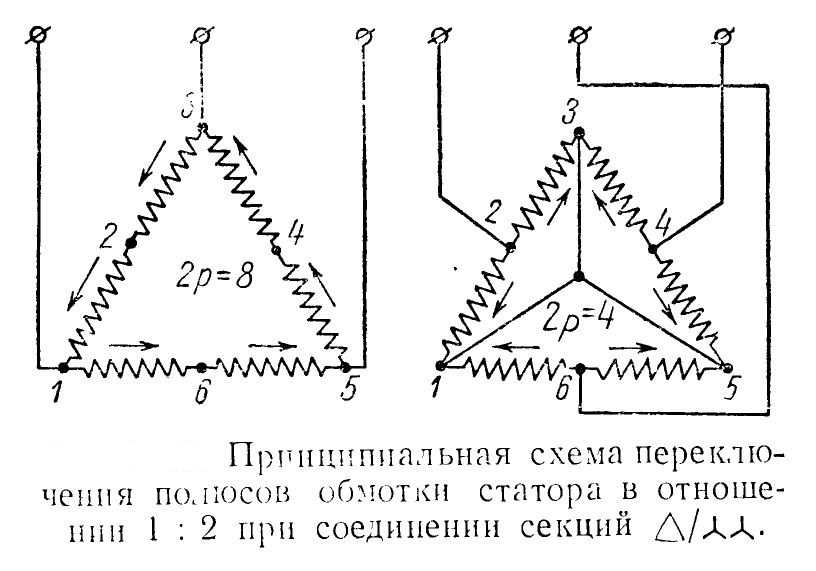 В этой статье мы рассмотрим принципы работы постоянного и переменного тока и простой работы двигателя.
В этой статье мы рассмотрим принципы работы постоянного и переменного тока и простой работы двигателя.
Асинхронные двигатели переменного тока
В вентиляторах Woods Air Movements чаще всего используются асинхронные двигатели переменного тока. Они могут работать непосредственно от электросети, они надежны, требуют минимального обслуживания и относительно недороги.
В трехфазном асинхронном двигателе переменного тока катушки изолированного провода находятся в пазах статора, расположенных в корпусе. Эти катушки сконфигурированы так, чтобы обеспечить набор электромагнитных полюсов для каждой из трех электрических фаз (U, V и W) при подаче питания.
На рис. 1 показан двигатель, обмотки которого расположены так, чтобы обеспечить пару полюсов для каждой фазы (обозначены U1 и U2, V1 и V2, W1 и W2). Поскольку на каждую фазу приходится два полюса, это описывается как двухполюсная конфигурация; если бы для каждой фазы было две пары полюсов, это была бы 4-полюсная конфигурация — и так далее.
Когда катушки в статоре подключены к источнику переменного тока, будет течь электрический ток и создавать магнитное поле — катушки намотаны так, что полюса в каждой паре имеют противоположную полярность.
Рисунок 1. Циклическое вращающееся магнитное поле в трехфазном асинхронном двигателе переменного тока
Циклический характер формы волны переменного тока приводит к тому, что магнитное поле вращается вокруг центральной оси статора с двумя северными и двумя южными полюсами. в любое время. Скорость этого вращения определяется количеством пар полюсов и частотой электропитания (либо 50 Гц, либо 60 Гц — см. «Основы двигателей, часть первая»).
При наличии одной пары полюсов магнитное поле вращается один раз за электрический цикл; где есть две пары, магнитное поле совершает один оборот за два цикла, а там, где есть три пары, оно вращается один раз за три цикла.
Основное уравнение для установления синхронной скорости заключается в следующем:
Синхронная скорость (Rev/min) = 2 x Частота питания (Гц) x 60
Количество для каждой фазы
Таким образом, если двигатель на рисунке 1 работал на подаче 50 Гц, синхронная скорость будет:
2 x 50 x 60 = 3000 Rev/min
2
это может быть Таким образом, видно, что чем больше число полюсов, тем медленнее будет синхронная скорость, поэтому двигатель с 12 полюсами на фазу будет иметь синхронную скорость всего 500 об/мин.
Ротор
Наряду со статором наиболее важной частью асинхронного двигателя переменного тока является ротор. Он состоит из стержней ротора, обычно изготовленных из алюминия или меди, которые на своих концах соединены с кольцами из того же материала. Иногда его называют ротором с «беличьей клеткой» (см. рис. 2).
Поскольку ротор расположен во вращающемся магнитном поле статора, возникающие линии магнитного потока будут разрезать стержни ротора и индуцировать напряжение в роторе. Это, в свою очередь, приведет к протеканию электрического тока по стержням ротора (обозначенному на рис. 2 красными стрелками), который создаст собственное магнитное поле вокруг стержней ротора. Это магнитное поле взаимодействует с магнитным полем статора, создавая силу на стержнях ротора, заставляя ротор вращаться вокруг своей оси.
Рисунок 2. Ротор с «беличьей клеткой»
Поскольку напряжение в стержнях ротора создается магнитным полем в статоре, прорезающем стержни ротора, если ротор вращается с синхронной скоростью, не будет относительное движение между стержнями ротора и магнитным полем статора, в результате чего в стержнях ротора не индуцируется напряжение.
Если к ротору приложить нагрузку, он начнет замедляться и, следовательно, начнет взаимодействовать с магнитным полем статора, и будет создаваться крутящий момент, как показано на рис. 2. нагрузка, приложенная к ротору.
Синхронная скорость зависит от частоты электропитания и конфигурации обмотки статора (количества полюсов). Разница между синхронной скоростью и скоростью ротора известна как скольжение; это выражается в процентах от синхронной скорости и может быть рассчитано по уравнению:
Скольжение = Синхронная скорость – скорость ротора
Синхронная скорость
60072
На рис. 3 показана конструкция типичного ротора. Стержни ротора обычно помещаются в пазы стального сердечника для усиления магнитного поля ротора. Стержни ротора обычно наклонены так, что они не совпадают с обмотками статора, что снижает электромагнитный шум и обеспечивает более плавную передачу крутящего момента.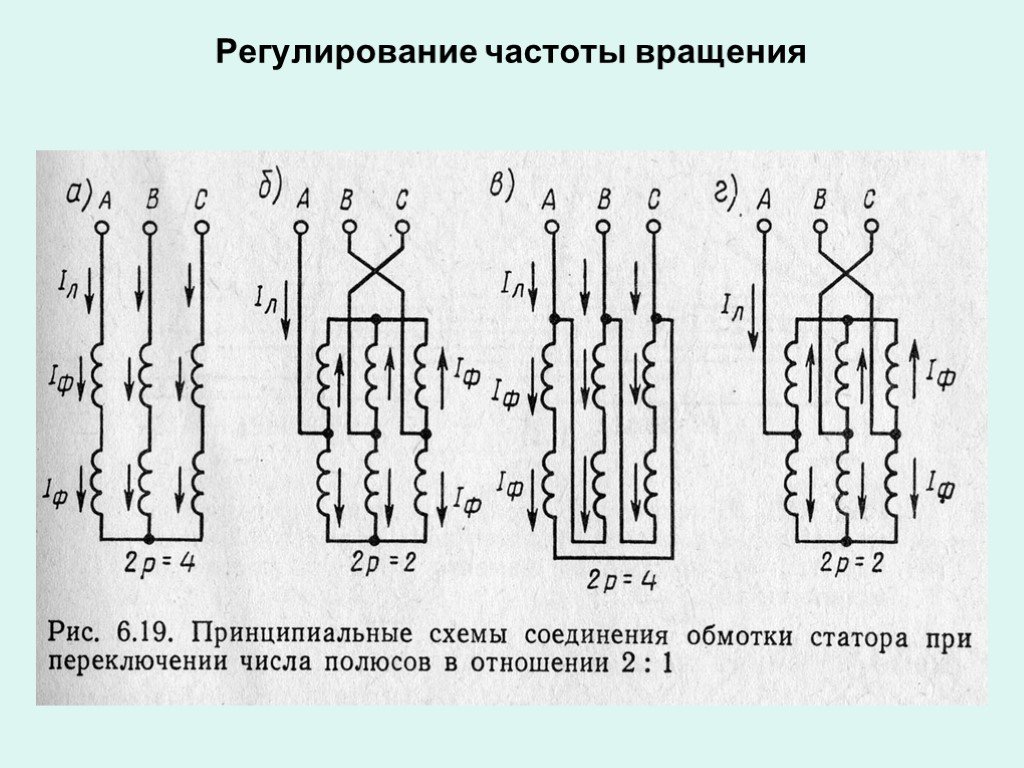
Рисунок 3: Типовая конструкция ротора
Сердечник состоит из стальных пластин, сложенных вместе, в то время как стержни ротора и торцевые кольца обычно изготавливаются путем заливки расплавленного алюминия в форму или форму, окружающую пакет пластин ротора. Этот расплавленный алюминий протекает через прорези в блоке ротора, образуя стержни ротора. Между стержнями ротора и стальным сердечником нет изоляции, поскольку индуцированное напряжение низкое.
Рисунок 4. Компоненты асинхронного двигателя переменного тока общего назначения
Однофазные асинхронные двигатели переменного тока
Статор, сконфигурированный для однофазного питания, не сможет инициировать вращение неподвижного ротора, потому что его магнитное поле будет просто переключаться между полярностями. В результате требуется дополнительная обмотка для обеспечения прогрессивно вращающегося магнитного поля. Эта вспомогательная обмотка подключена к однофазному источнику питания через конденсатор, так что форма ее напряжения может быть не в фазе с формой волны первичной обмотки.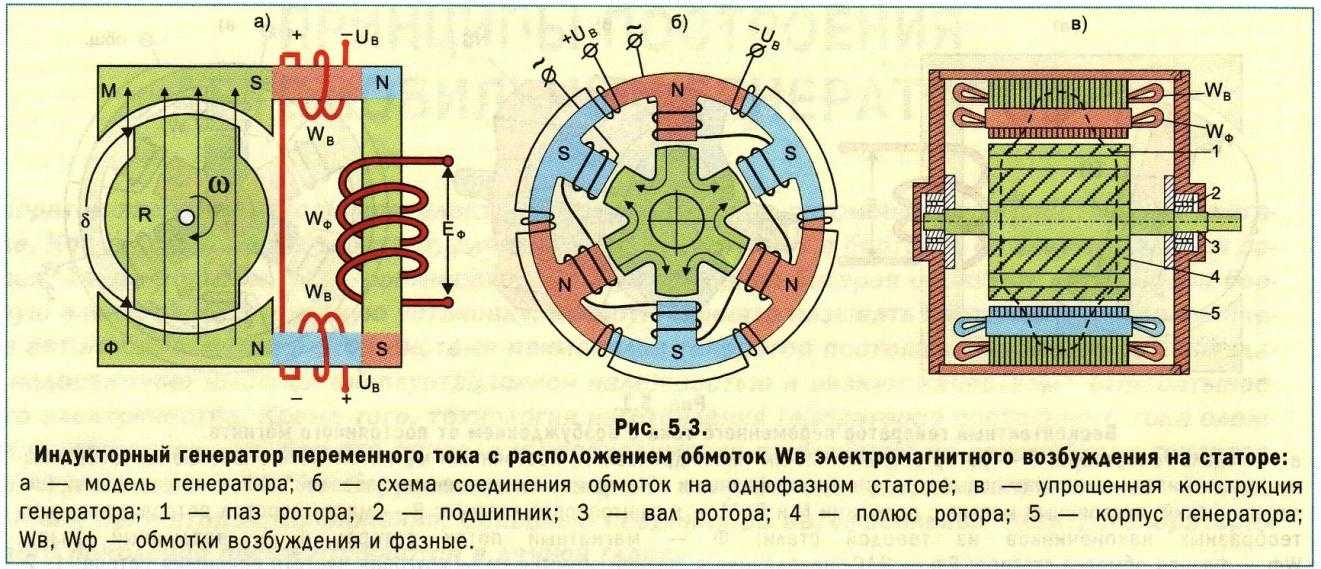
Рисунок 5. Непрерывно вращающееся магнитное поле в однофазном асинхронном двигателе переменного тока, создаваемое вспомогательной обмоткой, подключенной к конденсатору
На рисунке 5 показано, как это создает непрерывно вращающееся магнитное поле, позволяющее индуцировать вращение.
НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ ПРОЧИТАТЬ ЧАСТЬ 3
Как рассчитать число оборотов двигателя
При эксплуатации, контроле, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Что такое число оборотов двигателя?
Об/мин — это единица измерения, используемая для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, которое вал ротора совершает полный оборот в минуту.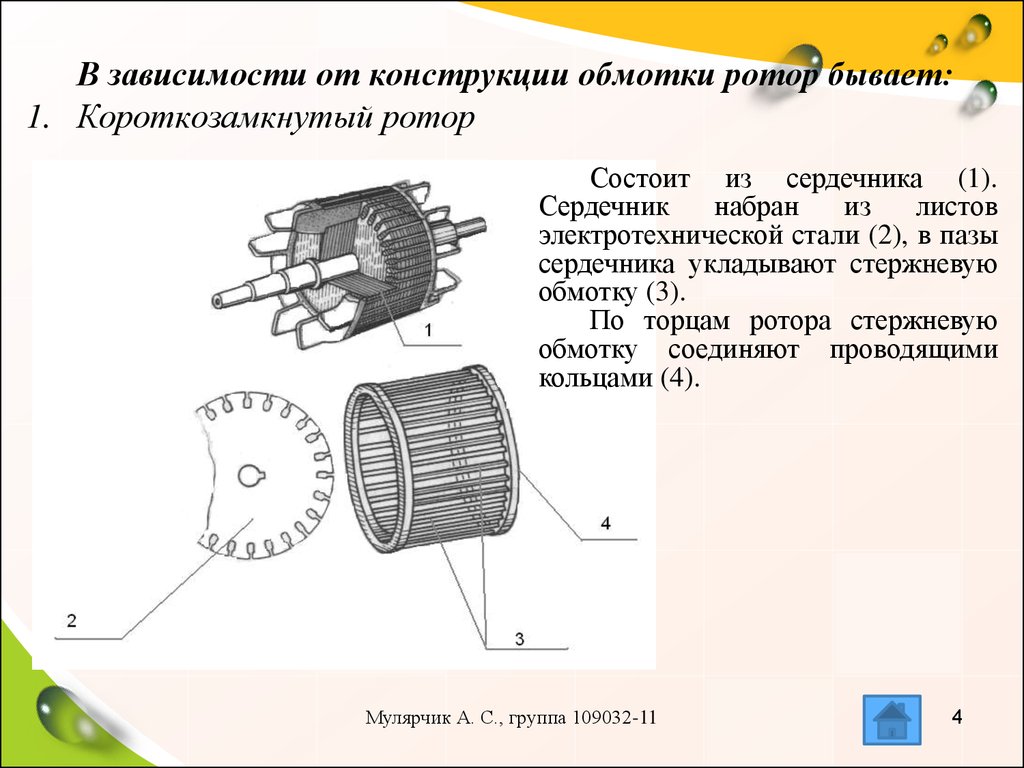 Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать число оборотов в минуту
Расчет числа оборотов двигателя, а также другие параметры, такие как крутящий момент, напряжение и мощность, необходимы при выборе двигателя для конкретного применения. Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить предложение
Скорости асинхронных двигателей переменного тока
Двигатели переменного тока предназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Также необходимо учитывать проскальзывание, представляющее собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Чтобы отрегулировать скорость трехфазного двигателя переменного тока, вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления. Многие устройства управления переменным током также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если у вас нет трехфазного питания. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорости двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как у двигателей переменного тока. На скорость двигателей постоянного тока влияет несколько других факторов, в том числе рабочее напряжение двигателя, сила магнитов и количество витков провода в якоре. Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Услуги по ремонту двигателей переменного/постоянного тока
Как рассчитать число оборотов двигателя
Чтобы рассчитать число оборотов асинхронного двигателя переменного тока, умножьте частоту в герцах (Гц) на 60 — — для количества секунд в минуте — на два для отрицательные и положительные импульсы в цикле. Затем вы делите на количество полюсов двигателя:
Затем вы делите на количество полюсов двигателя:
- (Гц x 60 x 2) / количество полюсов = об/мин без нагрузки
Вы также можете вычислить рейтинг проскальзывания, вычитая номинальную скорость при полной нагрузке из синхронной скорости, разделив результат на синхронную скорость и умножив его на 100:
- ((синхронная скорость – номинальная скорость при полной нагрузке) / (синхронная скорость)) x 100 = рейтинг скольжения
Затем, чтобы найти число оборотов при полной нагрузке, вы конвертируете показатель скольжения в число оборотов в минуту, а затем вычитаете его из числа оборотов без нагрузки:
- Для расчета оборотов при полной нагрузке: об/мин – проскальзывание оборотов = об/мин при полной нагрузке
Скорость вращения двигателя постоянного тока зависит от напряжения, подаваемого на двигатель. Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях.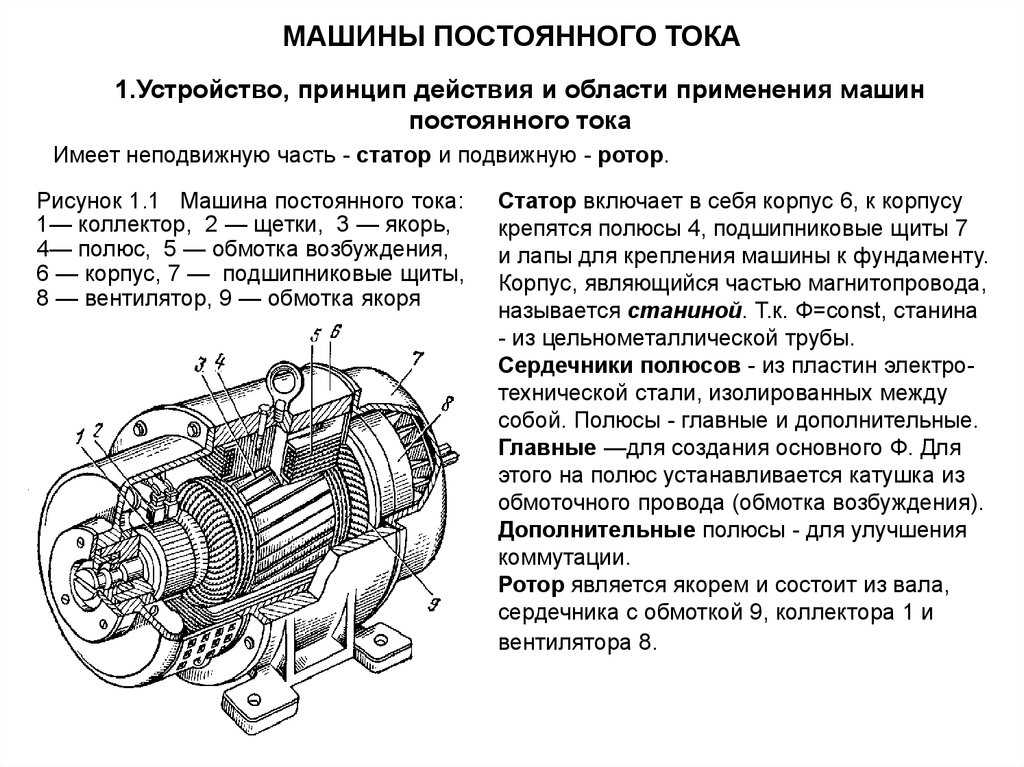 Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Примеры расчета формулы оборотов двигателя
Давайте рассмотрим некоторые примеры формулы оборотов. Для двигателя переменного тока число полюсов и частота определяют число оборотов холостого хода. Для системы с частотой 60 Гц с четырьмя полюсами уравнение оборотов будет следующим:
- (Гц x 60 x 2) / количество полюсов = число оборотов без нагрузки .
- (60 х 60 х 2) / 4
- 7 200 / 4 = 1 800 об/мин
Величина скольжения незначительно зависит от конструкции двигателя. Разумная скорость при полной нагрузке для четырехполюсного двигателя с частотой 60 Гц составляет 1725 об/мин. Скольжение – это разница между скоростью без нагрузки и скоростью с полной нагрузкой. В данном случае это будет:
- Обороты при полной нагрузке – Обороты без нагрузки = проскальзывание оборотов
- 1800 – 1725 = 75 об/мин
При частоте 60 Гц двухполюсный двигатель работает со скоростью 3600 об/мин без нагрузки и около 3450 об/мин с нагрузкой:
- (Гц x 60 x 2) / число полюсов = об/мин без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 2 = 3 600 об/мин
При частоте 60 Гц шестиполюсный двигатель будет работать со скоростью 1200 об/мин без нагрузки и приблизительно со скоростью 1175 об/мин с нагрузкой. Двигатель с восемью полюсами будет работать при 900 об/мин без нагрузки и около 800 об/мин под нагрузкой. 12-полюсные двигатели, которые встречаются даже реже, чем шестиполюсные и восьмиполюсные модели, работают со скоростью 600 об/мин без нагрузки, а 16-полюсные двигатели работают со скоростью 450 об/мин.
Двигатель с восемью полюсами будет работать при 900 об/мин без нагрузки и около 800 об/мин под нагрузкой. 12-полюсные двигатели, которые встречаются даже реже, чем шестиполюсные и восьмиполюсные модели, работают со скоростью 600 об/мин без нагрузки, а 16-полюсные двигатели работают со скоростью 450 об/мин.
Ремонт двигателя от Global Electronic Services
Важно понимать технические характеристики вашего оборудования, чтобы вы могли лучше эксплуатировать и обслуживать его. Скорость вашего двигателя является неотъемлемой частью его производительности, а возможность расчета и контроля числа оборотов в минуту поможет вам получить максимальную отдачу от ваших машин.
Профессиональные услуги по ремонту и техническому обслуживанию также могут сыграть важную роль, помогая вам в полной мере использовать возможности вашего оборудования. В Global Electronic Services мы имеем большой опыт ремонта и обслуживания широкого спектра промышленного оборудования, включая двигатели переменного и постоянного тока, серводвигатели, промышленную электронику, гидравлику и пневматику и многое другое. Чтобы узнать больше о ремонте двигателей переменного или постоянного тока или о наших услугах, свяжитесь с нами сегодня.
Чтобы узнать больше о ремонте двигателей переменного или постоянного тока или о наших услугах, свяжитесь с нами сегодня.
Запросить цену
Как работают асинхронные двигатели переменного тока
Как работают асинхронные двигатели переменного токаРанее я рассказывал, как работают двигатели постоянного тока, но асинхронные двигатели на самом деле гораздо полезнее для самодельных машин такие как ленточные пилы. Асинхронные двигатели сложнее понять. Это был злой и безумный гений Никола Тесла, который их изобрел. Есть обширная Википедия статья об асинхронных двигателях, поэтому я постараюсь сделать эту страницу простой.
Здесь я просто вытащил ротор из небольшого асинхронного двигателя с заштрихованными полюсами.
(тип, который будет использоваться для питания вентилятора внутри морозильной камеры
холодильник). Электрические соединения с ротором отсутствуют.
Ротор тоже не магнит, хотя и притягивается магнитом.
Обратите внимание на наклонные линии на роторе. На самом деле это своего рода обмотки короткого замыкания из алюминия, залитого место (светлые диски на обоих концах образуют часть этого короткого обмотка цепи). Эта обмотка короткого замыкания является ключом к тому, что делает моторная работа.
Если ротор подвергается воздействию изменяющегося магнитного поля, небольшое напряжение индуцируется в обмотках. Поскольку обмотки короткозамкнуты, это вызывает протекание тока, который, в свою очередь, создает магнитное поле. который препятствует изменению магнитного поля. Обмотки эффективно сделать ротор, который, хотя и обладает магнитной проницаемостью, сопротивляется быстрому меняется на его магнитное поле.
Аналогичный эффект можно продемонстрировать, вращая алюминиевый диск.
подвергая часть его магнитному полю через диск. Как
вращающийся диск удерживается между магнитами, прикрепленными к металлической скобе
на этом фото тормозит сразу. Как и в роторе асинхронного двигателя,
изменяющееся магнитное поле индуцирует ток в алюминии,
что, в свою очередь, противодействует изменению.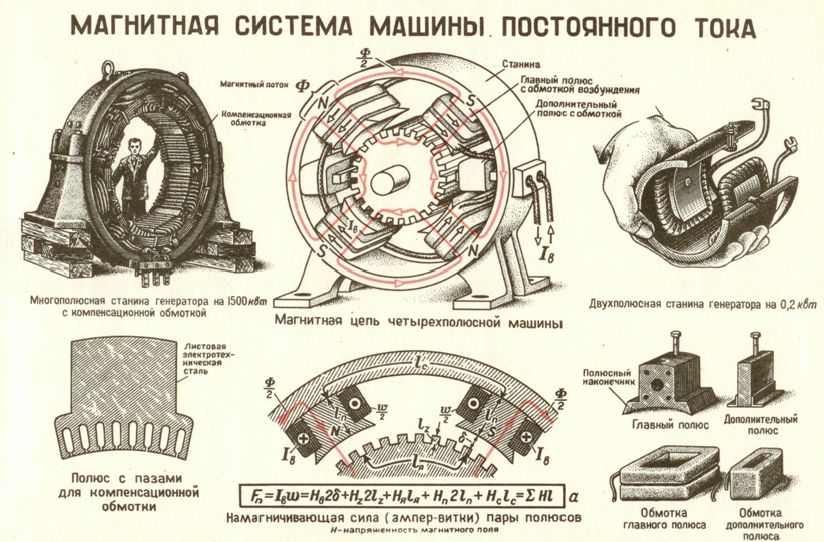 Магнитное поле через
диск следует за вращением, оттягивая его назад и останавливая
вращения в короткие сроки (фактически в пределах четверти оборота диска).
Рекомендую посмотреть видео вверху этой статьи, оно делает это
гораздо понятнее.
Магнитное поле через
диск следует за вращением, оттягивая его назад и останавливая
вращения в короткие сроки (фактически в пределах четверти оборота диска).
Рекомендую посмотреть видео вверху этой статьи, оно делает это
гораздо понятнее.
Тот факт, что ротор не любит изменений в магнитном поле, делает асинхронный двигатель работает как электрический тормоз, когда на него подается постоянный ток его обмотки.
Здесь у меня есть 10-фунтовый груз, прикрепленный к шкиву на двигателе. Подача нескольких ампер на обмотки этой печи мощностью в поллошадиной силы двигателя достаточно, чтобы заставить вес падать очень медленно. Однако нет независимо от того, какой ток применяется, вес все равно будет медленно падать, потому что ротор сопротивляется только изменению в магнитном поле, поэтому эффект торможения происходит только при вращении ротора.
Пока что мы установили, что асинхронные двигатели хороши на , а не на .
превращение. Но если магнитное поле движется, ротор хочет вращаться вместе с ним. Возвращаясь к примеру с металлическим диском, если я двигаю магниты
быстро мимо диска, диск начинает вращаться, следуя за магнитами.
Возвращаясь к примеру с металлическим диском, если я двигаю магниты
быстро мимо диска, диск начинает вращаться, следуя за магнитами.
Если бы мы вращали статор вокруг ротора, это заставляло бы ротор вращаться. также. Но это было бы бесполезно в качестве двигателя.
В трехфазном асинхронном двигателе переменного тока создадим вращающееся магнитное поле путем подачи электрического тока на разные обмотки в разное время.
Представьте, что через синие обмотки проходит ток, так что полюс 1 Север и полюс 4 — Юг. Далее пропускаем ток через красный обмотки так, чтобы 2 северная и 5 южная, далее через зеленую, делая 3 севера, а потом снова по синему, но в обратном направлении направление, как и раньше, так что 4 — это север, а 1 — юг. Это будет создать вращающееся магнитное поле.
В реальном трехфазном двигателе мы фактически применяем синусоидальные волны ко всем трем
обмотки одновременно. Синусоиды все 60 градусов (или один
шестая часть цикла) не совпадают по фазе друг с другом, так что север плавно
переходы с 1 на 2, со 2 на 3 и т. д.
д.
Статор создает вращающееся магнитное поле. Ротор будет пассивно намагничиваться этим полем. Но ротор обмотки короткого замыкания заставляют его сопротивляться изменениям магнитного поля, поэтому вращение поля в статоре будет отставать от такового в ротор. При отставании угла поля в статоре, магнитное притяжение заставит сам ротор вращаться, в конце концов со скоростью, близкой, но не совсем к скорости вращающегося поля в статоре.
Я должен добавить, что в реальной трехфазной передаче фазы 120° (одна треть периода цикла) не совпадают по фазе друг с другом, а не на 60°. Но мы можем получить 60°, взяв третью фазу, которая составляет 240° градусов. не в фазе от первого и поменять местами провода, что меняет его или изменяет это фаза на 180°. 240 — 180 = 60. Фазы 120° градусов не совпадают по фазе друг с другом, так что сумма токов через все три фазы всегда дают в сумме ноль. Таким образом, ток не должен течь через нейтральный (заземляющий) проводник.
Работу трехфазных асинхронных двигателей понять легче,
но в большинстве домов только однофазный переменный ток.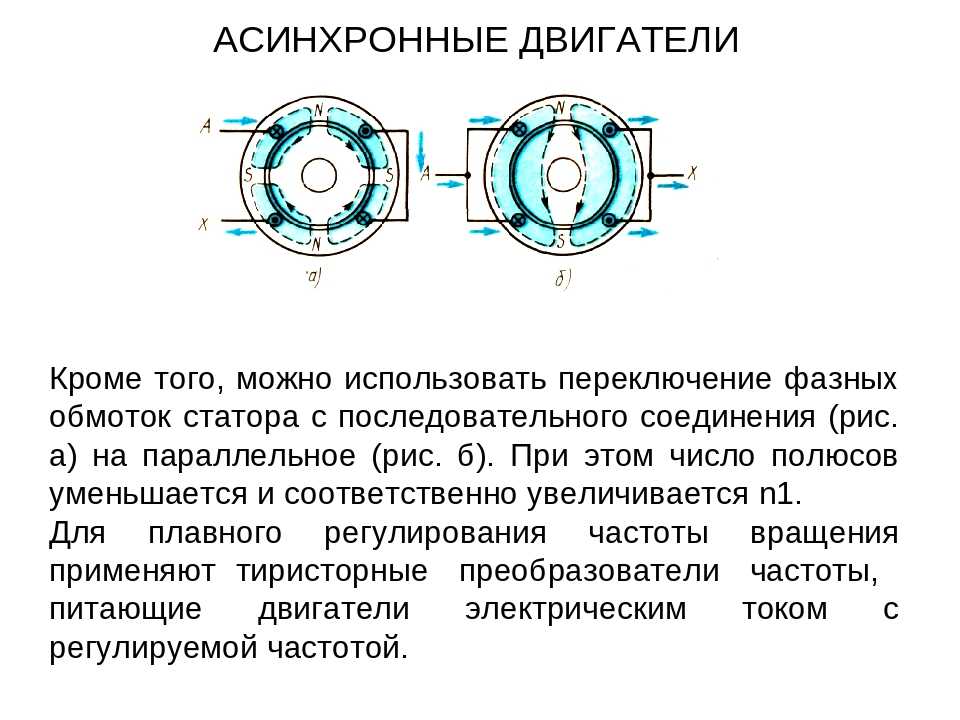 Однако в Северной Америке
В системах на 120 вольт однофазное питание часто называют двухфазным
мощность, потому что есть две противоположные фазы по 120 вольт. Но эти
сдвинуты по фазе на 180 градусов. Между ними 240 вольт.
но не приближает нас к вращающемуся полю.
Однако в Северной Америке
В системах на 120 вольт однофазное питание часто называют двухфазным
мощность, потому что есть две противоположные фазы по 120 вольт. Но эти
сдвинуты по фазе на 180 градусов. Между ними 240 вольт.
но не приближает нас к вращающемуся полю.
С однофазным мы можем создать только поле, которое ходит туда-сюда. Однако, если мы подвергнем ротор асинхронного двигателя возвратно-поступательному поле, а оно уже кружится, оно будет следовать туда-сюда, так же, как вы можете поддерживать вращение маховика и кривошипа, просто нажимая и потянув за рукоятку. Но переменного поля будет недостаточно чтобы двигатель закрутился с места.
В однофазных двигателях запуск двигателя обычно требует некоторого
пусковая обмотка, которая, хотя и не совсем вращается
поле, по крайней мере, создает переменное поле, имеющее некоторый вращательный
Компонент для запуска ротора. Например, в затененном столбе
двигатель, у нас есть медная обмотка короткого замыкания на одной стороне каждого
полюс.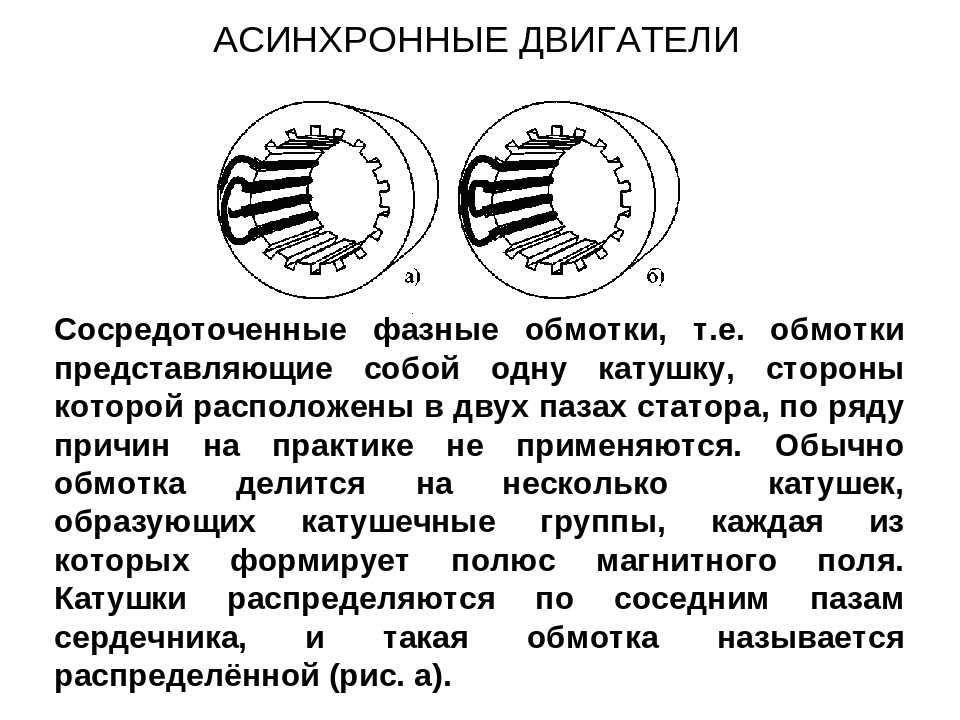 Обмотка короткого замыкания сопротивляется изменениям магнитного поля,
вызывая изменение магнитного поля через обмотку короткого замыкания
всегда отставать от основного полюса.
Обмотка короткого замыкания сопротивляется изменениям магнитного поля,
вызывая изменение магнитного поля через обмотку короткого замыкания
всегда отставать от основного полюса.
Это заставляет ротор поворачиваться от основного полюса к короткозамкнутую часть при изменении магнитного поля, потому что заштрихованная часть будет отставать от основного полюса. С сопротивлением ротора меняется и поле, поле в роторе, хотя и совмещенное с главный полюс находится сзади, поэтому его притягивает заштрихованная часть полюс.
Этот эффект работает даже в том случае, если в двигатель посылаются только импульсы постоянного тока. При условии, что двигатель вращается легко, каждый импульс приведет к тому, что ротор повернуться на несколько градусов.
При подаче переменного тока двигатель работает непрерывно.
Но заштрихованные полюса не обеспечивают большого пускового момента. Фактически,
крутящий момент, создаваемый заглохшим двигателем с расщепленными полюсами, значительно
меньше, чем когда он работает почти на полной скорости. Но этого достаточно, чтобы получить
двигатель работает.
Но этого достаточно, чтобы получить
двигатель работает.
Но заштрихованные полюса — это обмотки короткого замыкания, поэтому они потребляют много силы. Это делает двигатели с экранированными полюсами очень неэффективными.
В более крупных однофазных двигателях мощностью 1/4 л.с. и выше пуск обычно осуществляется вспомогательной обмоткой. Вспомогательная обмотка либо один с меньшим количеством витков и большим сопротивлением или последовательно с конденсатором. Любой метод делает магнитное поле немного не в фазе с основное поле, тем самым добавляя к полю вращательную составляющую, которая достаточно, чтобы запустить двигатель.
Но пусковая обмотка обычно малоэффективна, поэтому большинство
однофазные двигатели имеют центробежный выключатель, который отключает
пусковая обмотка после того, как двигатель наберет скорость. Этот переключатель закрывается
(повторное подключение) снова вызывает «щелчок», который вы слышите во многих
двигателей по мере их останова, через секунду или две после выключения.
Существует множество способов замены обмотки стартера на однофазных двигателях.
может работать. К ним относятся:
- Двигатели с конденсаторным пуском
- Двигатели с резистивным пуском
- Двигатели с расщепленной фазой (также известные как двигатели с конденсаторным пуском)
Двухполюсный и четырехполюсный
Большинство асинхронных двигателей являются двухполюсными или четырехполюсными. В двухполюсном двигателе
статор имеет один северный и один южный полюс в любой момент времени, а ротору нужно
сделать один полный оборот (или около того) за каждый цикл. Для систем 60 Гц,
двухполюсный индукционный ротор будет работать со скоростью от 3500 до 3600 об/мин (или около 58-60 об/мин).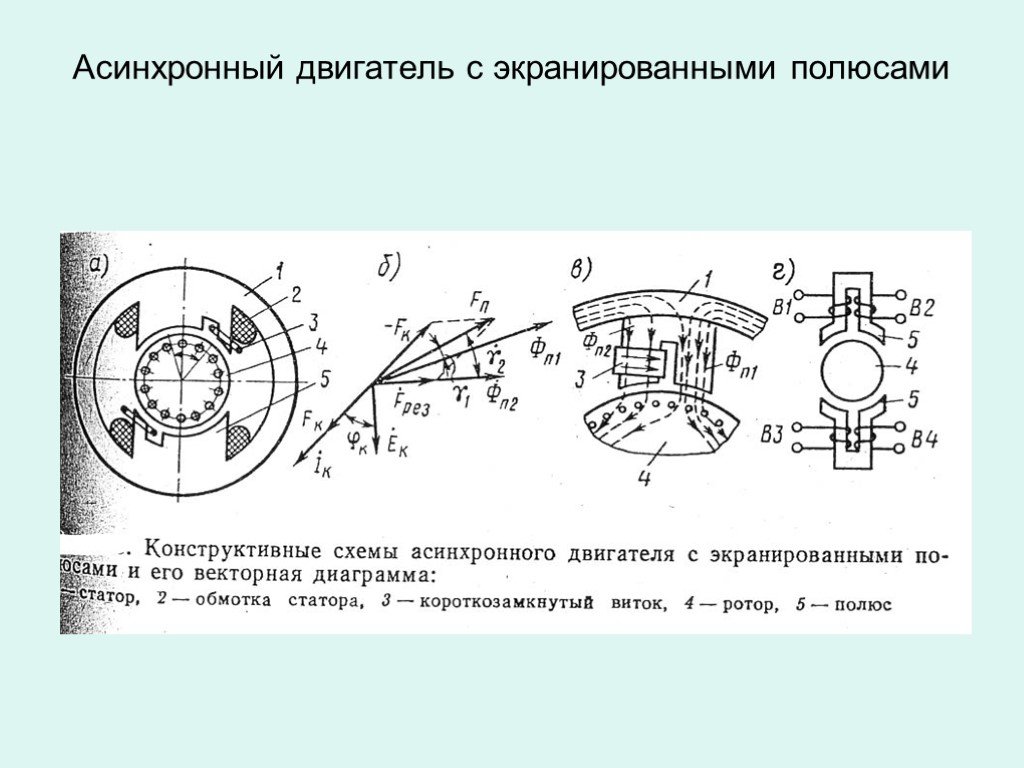 оборотов в секунду). Для систем с частотой 50 Гц двухполюсный двигатель будет работать 2900 до 3000 об/мин.
оборотов в секунду). Для систем с частотой 50 Гц двухполюсный двигатель будет работать 2900 до 3000 об/мин.
В четырехполюсном двигателе статор в любой момент времени имеет два северных и два южных полюса, с севером и югом всегда на расстоянии 90 градусов друг от друга (таким образом, два северных и два южных полюса всегда друг напротив друга). Ротор намагничивается по этой схеме. Для цикла требуется только половина оборота, и четырехполюсный двигатель будет работать от 1725 до 1800 об/мин для систем с частотой 60 Гц и от 1425 до 1500 об/мин для систем с частотой 50 Гц.
Двигатели с более чем четырьмя полюсами встречаются гораздо реже и используются только для специальные приложения. Типичный двигатель «коробочного вентилятора» будет иметь шесть полюсов, а двигатель потолочного вентилятора будет иметь восемь или более полюсов.
Различные скорости
Основным недостатком асинхронных двигателей является то, что они непрактичны для
работа с переменной скоростью. При вращении поля с фиксированной скоростью (определяемой
источник переменного тока), двигатель работает эффективно только тогда, когда он работает вблизи
к этой скорости. Для небольших бытовых вентиляторов рекомендуется работать на более низкой скорости.
достигается за счет большого количества «скольжения», т. е. ротор может
вращаться так медленно, как половина скорости
поле, но это делает двигатель очень неэффективным, а скорость вращения
сильно зависит от нагрузки, поэтому такой подход не подходит
для вождения техники.
При вращении поля с фиксированной скоростью (определяемой
источник переменного тока), двигатель работает эффективно только тогда, когда он работает вблизи
к этой скорости. Для небольших бытовых вентиляторов рекомендуется работать на более низкой скорости.
достигается за счет большого количества «скольжения», т. е. ротор может
вращаться так медленно, как половина скорости
поле, но это делает двигатель очень неэффективным, а скорость вращения
сильно зависит от нагрузки, поэтому такой подход не подходит
для вождения техники.
Однако электронные частотно-регулируемые приводы (VFD) иногда используются с асинхронными двигателями. ЧРП повторно синтезирует переменного тока на разных частотах и подает его в двигатель, чтобы двигатель сама по себе все еще работает со скоростью, близкой к скорости магнитного поля. Многие новые (после 2000 г.) токарные станки с электронным регулированием скорости используют частотно-регулируемые приводы.
Назад на мой сайт по деревообработке
Основы двигателей переменного тока | Асинхронные двигатели
Содержание
Двигатели переменного тока используются во всем мире во многих жилых, коммерческих, промышленных и коммунальных приложениях. Двигатель переменного тока может быть частью насоса, воздуходувки, конвейера или смесителя.
Двигатель переменного тока может быть частью насоса, воздуходувки, конвейера или смесителя.
Двигатели преобразуют электрическую энергию в механическую.
Электродвигатели переменного тока в основном делятся на две категории: Синхронный двигатель и Асинхронный двигатель.
Синхронный двигатель
Синхронный двигатель преобразует переменный ток в механическую энергию. Он работает на синхронной скорости. Скорость вращающегося магнитного поля называется синхронной скоростью (N s ) .
Ниже приведена простая формула для определения синхронной скорости:
N с = (120F/P), где F=частота и N=количество полюсов
Например, синхронная скорость для двух -полюсный двигатель, работающий на частоте 50 Гц, составляет 3000 об/мин.
Синхронная скорость уменьшается по мере увеличения числа полюсов.
| Количество полюсов | Синхронная скорость |
| 2 | 3000 |
| 4 | 1500 |
| 6 | 1000 |
| 8 | 750 |
| 10 | 600 |
Асинхронный двигатель
Асинхронный двигатель обычно называют асинхронным двигателем переменного тока .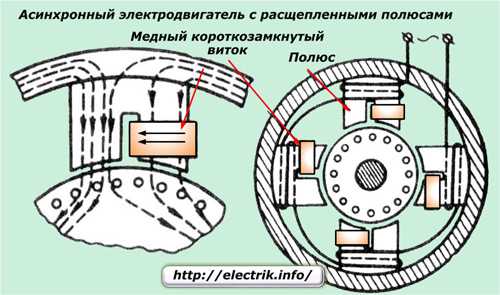 Асинхронный двигатель преобразует переменный ток в механическую энергию со скоростью, меньшей синхронной скорости, поэтому он известен как асинхронный двигатель.
Асинхронный двигатель преобразует переменный ток в механическую энергию со скоростью, меньшей синхронной скорости, поэтому он известен как асинхронный двигатель.
ссылка на изображение из Википедии
Асинхронные двигатели переменного тока обычно используются в промышленности. Важные части асинхронного двигателя указаны ниже:
⇒ Статор
⇒ Ротор
⇒ Подшипники
⇒ Конечный кронштейн
⇒ Охлаждающий вентилятор
СтаторСтатор является станционным электрическим. Статор состоит из тонких пластин из высококачественной легированной стали для уменьшения потерь на вихревые токи.
Статор в основном состоит из трех частей: Внешняя рама , Сердечник статора и Обмотки статора .
Внешняя рама — это внешний корпус двигателя, в котором находится сердечник статора и который защищает внутренние части асинхронного двигателя. Как правило, он отливается от небольших двигателей и изготавливается для больших двигателей.
Как правило, он отливается от небольших двигателей и изготавливается для больших двигателей.
Сердечник статора состоит из нескольких сотен тонких пластин из высококачественной кремнистой стали. Пластины статора закреплены вместе в пазах в корпусе статора. В пазы сердечника статора вставлены витки изолированного провода.
Каждая пластина изолирована от другой тонкими слоями лака. Каждая группа катушек вместе со стальным сердечником, который она окружает, образует электромагнит.
Обмотки статора напрямую связаны с трехфазным источником питания. В клеммной коробке асинхронного двигателя подключено шесть клемм (по две на каждую фазу).
Имеется определенное количество полюсов обмоток статора. Если количество полюсов увеличивается, скорость двигателя уменьшается, а если количество полюсов уменьшается, скорость двигателя увеличивается.
Ротор
Ротор представляет собой вращающуюся электрическую часть асинхронного двигателя.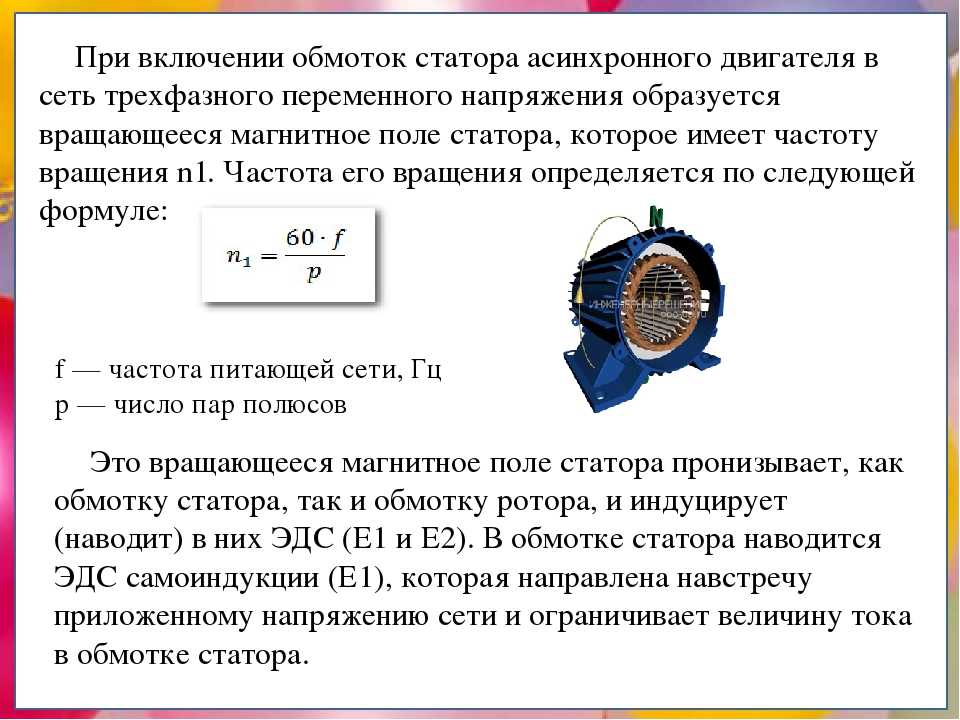 Есть в основном два типа роторов: Ротор с короткозамкнутым ротором и Ротор с фазовой обмоткой .
Есть в основном два типа роторов: Ротор с короткозамкнутым ротором и Ротор с фазовой обмоткой .
Ротор с короткозамкнутым ротором
Ротор с короткозамкнутым ротором состоит из пакета стальных пластин с равномерно расположенными токопроводящими стержнями по окружности. Токопроводящие стержни состоят из алюминия или меди, которые соединяются концевыми кольцами.
Через этот проводник протекает ток, образуя электромагнит. Пазы ротора обычно скошены, а не параллельны валу. Это снижает гудящий шум двигателя, а также обеспечивает равномерный крутящий момент.
Ротор с фазной обмоткой
Конструкция ротора с фазной обмоткой отличается от конструкции ротора с короткозамкнутым ротором. Ротор с фазовой обмоткой также называют ротором с контактными кольцами. Он имеет цилиндрический многослойный сердечник. Он имеет полузакрытый паз на внешней периферии, в котором находится трехфазная изолированная обмотка.
Обмотки ротора с контактными кольцами соединены в звезду. Кольца скольжения установлены на валу, как показано на схеме. На контактных кольцах есть щетки. Щетки соединены с переменным сопротивлением. Он добавляет внешний резистор в цепь ротора.
Основной функцией контактного кольца является увеличение пускового момента и уменьшение пускового тока. Он также контролирует начальную скорость двигателя.
Концевой кронштейн
Концевой кронштейн известен как корпус подшипника. Подшипники установлены на концевых кронштейнах. С каждой стороны рамы двигателя установлены два концевых кронштейна.
Концевые кронштейны поддерживают ротор таким образом, что между статором и ротором остается небольшой воздушный зазор. Между статором и ротором нет прямой физической связи.
Подшипники
Подшипники устанавливаются на вал, который затем устанавливается на концевые кронштейны. Целью подшипников в электродвигателе является поддержка ротора и поддержание небольшого и постоянного воздушного зазора.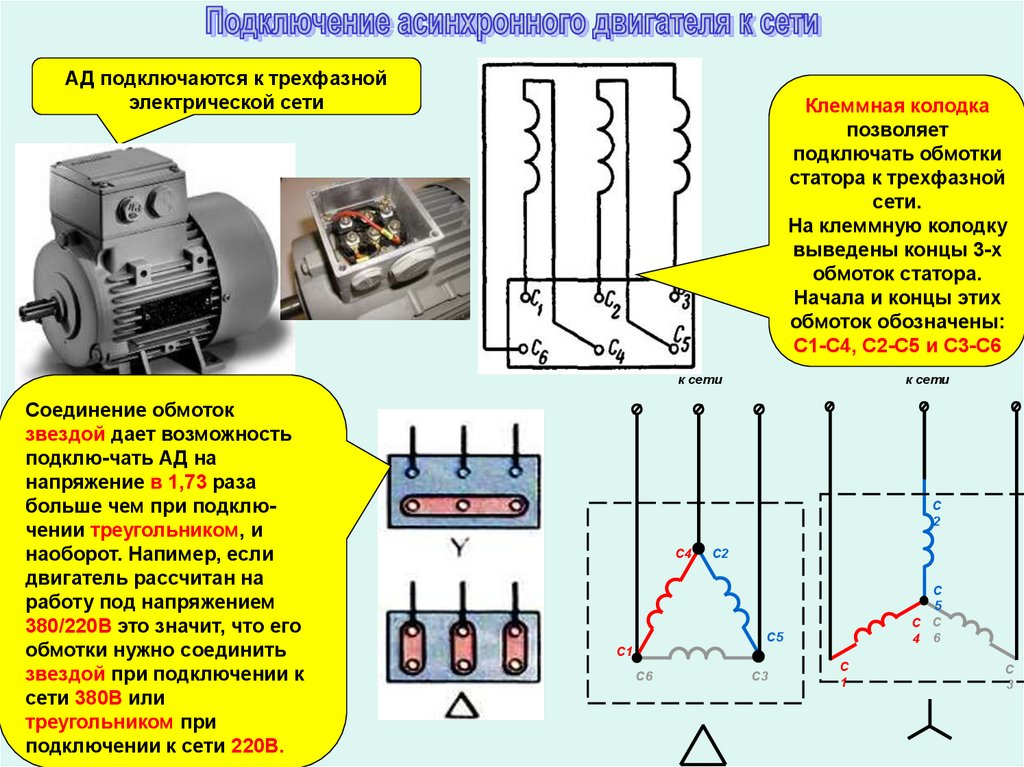
Охлаждающий вентилятор
Охлаждающий вентилятор обычно устанавливается на противоположном конце выходного вала. Вентилятор охлаждения вращается вместе с двигателем. Целью охлаждающего вентилятора является обеспечение увеличенного потока воздуха к двигателям при вращении.
Следующие обязательные к прочтению статьи
⇒ Наиболее часто используемый 3-х базовый пускатель двигателя с программой ПЛК!
⇒ Что такое сканер температуры? Как это работает?
⇒ Что такое серводвигатель? Как это работает?
⇒ Как работает пускатель звезда-треугольник?
⇒ Что такое устройство плавного пуска? Как это работает?
⇒ Основы автоматического выключателя.
⇒ Работа реле и его важность в области электротехники.
Вы можете прочитать больше статей об электротехнике, а также найти книги, которые расширят ваши знания в области КИПиА ⇒
- Книги по КИПиА
- Книги по ПЛК
- Книги по SCADA
Спасибо за внимание!
Рубрики Электрика Теги ЭЛЕКТРИЧЕСКАЯ, ДВИГАТЕЛИСкольжение полюсов в асинхронных двигателях
Серводвигатель, сервоприводы
Wiki
Асинхронные двигатели работают по принципу индукции тока в роторе, который должен вращаться со скоростью меньше синхронной скорости для возникновения индукции.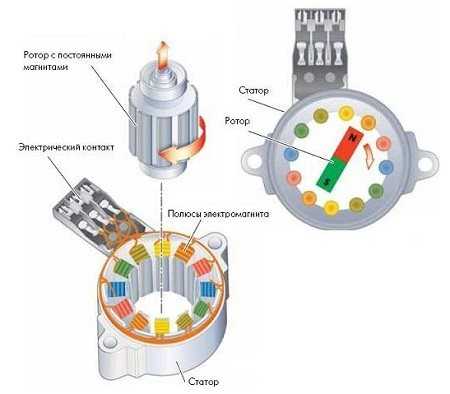 Это называется скоростью проскальзывания, и ее не следует путать с проскальзыванием полюсов.
Это называется скоростью проскальзывания, и ее не следует путать с проскальзыванием полюсов.
Почему асинхронные двигатели не имеют асинхронного хода и почему другие двигатели имеют асинхронный ход полюсов. Я попытаюсь ответить на этот вопрос, но сначала давайте определим полюса и синхронную скорость в отношении работы электродвигателя.
Полюса в электродвигателе относятся к полюсам магнитной цепи и входят в наборы по два, как обычный магнит. Один на север (N), а другой на юг (S). Если двигатель имеет два полюса, он будет иметь один N-полюс и один S-полюс. Если двигатель имеет четыре полюса, он будет иметь 2 N-полюса и 2 S-полюса и так далее.
Синхронная скорость в электродвигателе — это скорость, создаваемая бегущей волной магнитного поля, когда она вращается вокруг магнитной цепи статора. Синхронная скорость двигателя равна 120*f/p, где f = частота системы в Гц, а p равно количеству полюсов в двигателе.
Все двигатели переменного тока состоят из двух основных частей: (1) обмотки статора и железного сердечника и (2) обмотки ротора и железного сердечника, которые могут свободно вращаться и соединены с валом двигателя.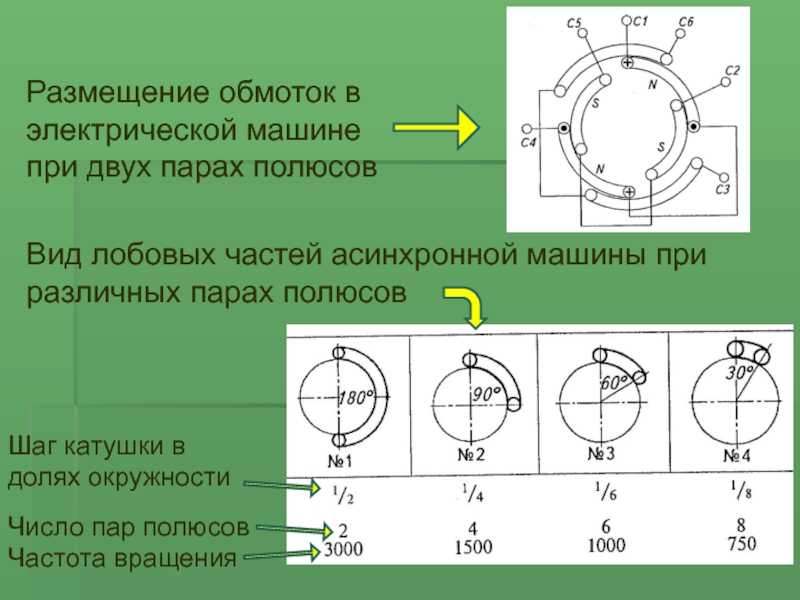 Для трехфазного асинхронного двигателя, когда на статор подается питание от трехфазного источника напряжения, будет создаваться магнитное поле, которое вращается с синхронной скоростью. Когда этот магнитный поток пересекает обмотку ротора, он индуцирует ток (согласно закону индукции Фарадея) в обмотке ротора, который создает второй магнитный поток. Эти два магнитных потока вращаются с синхронной скоростью и соединяются друг с другом, как два магнита, и, таким образом, передают крутящий момент непосредственно на вал ротора.
Для трехфазного асинхронного двигателя, когда на статор подается питание от трехфазного источника напряжения, будет создаваться магнитное поле, которое вращается с синхронной скоростью. Когда этот магнитный поток пересекает обмотку ротора, он индуцирует ток (согласно закону индукции Фарадея) в обмотке ротора, который создает второй магнитный поток. Эти два магнитных потока вращаются с синхронной скоростью и соединяются друг с другом, как два магнита, и, таким образом, передают крутящий момент непосредственно на вал ротора.
Теперь вот ключевая мысль, которую вы должны иметь в виду, чтобы понять, как работает асинхронный двигатель и почему нет асинхронного хода полюсов. Чтобы поле статора индуцировало ток в цепи ротора, ротор должен вращаться медленнее, чем синхронная скорость, чтобы выполнялся закон индукции Фарадея и поток пересекал обмотки ротора. Если бы ротор вращался с синхронной скоростью, поток статора не пересекал бы обмотки ротора, и в роторе не индуцировался бы ток, а второе магнитное поле было бы равно нулю.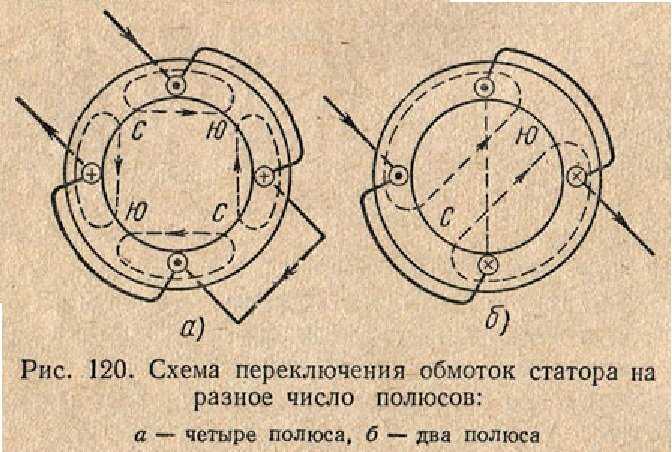 Следовательно, ротор должен вращаться со скоростью ниже синхронной скорости, чтобы в цепи ротора была индукция. Это называется скоростью проскальзывания, и ее не следует путать с проскальзыванием полюсов.
Следовательно, ротор должен вращаться со скоростью ниже синхронной скорости, чтобы в цепи ротора была индукция. Это называется скоростью проскальзывания, и ее не следует путать с проскальзыванием полюсов.
Другой тип двигателя (переменного тока) представляет собой синхронный двигатель, в котором на роторе имеется обмотка возбуждения с независимым возбуждением. Для работы синхронного двигателя вал ротора вращается с синхронной скоростью, и магнитное поле, создаваемое парами обмотки возбуждения, с полем статора и крутящим моментом передается на вал. В случае, когда крутящий момент на валу превышает силу магнитного поля, действующую на ротор, может произойти проскальзывание полюсов, что приводит к очень высоким величинам тока статора и крутящего момента на валу. Это состояние может привести к серьезному повреждению двигателя и срабатыванию автоматических выключателей.
Изучай. Понимать это. Задайте свои вопросы и ответьте на них, купив хорошую книгу по двигателям и изучив принципы преобразования энергии.
<- - Напишите комментарий - ->
Вам может понравиться:
Серводвигатели и приводы
[email protected]
[email protected]
Категория
- Сервоприводы
- Вики
- Часто задаваемые вопросы
Популярные
Преобразование рабочей частоты двигателя …
Предположим, что вы проверили механические свойства и центробежную силу на роторе при более высокой скорости от 50 Гц до 60 Гц, и они в порядке, тогда …
Поиск и устранение неисправностей двигателя
В руководстве по поиску и устранению неисправностей описывается широкий спектр проблем с двигателем. Как правило, категории расположены в соответствии с симптомами, предлагающими краткие …
Трехфазные двигатели переменного тока
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в случае двигателей переменного тока. Вращающийся магнит…
Вращающийся магнит…
Выбор электродвигателя
Во-первых, 7 вещей, которые следует учитывать при выборе электродвигателя: Выбор правильного двигателя не всегда прост. Есть так много переменных, чтобы…
Скольжение полюсов в асинхронных двигателях
Асинхронные двигатели работают по принципу индукции тока в роторе, который должен вращаться со скоростью меньше синхронной скорости, чтобы индукция… …
Цифровой сервопривод
Синхронный сервопривод переменного тока Gozuk разработан и изготовлен с использованием усовершенствованного алгоритма управления, основанного на рыночном спросе, который может реализовать …
Управление бесщеточным двигателем постоянного тока
Двигатель BLDC может иметь трапециевидную противо-ЭДС, есть так называемая методология управления трапециевидным двигателем (TRZ).