
| Названи | Обозначение | Описание |
| Монтажное исполнение | IMB3, IM1001 (указано значение для примера) | Основные виды монтажного исполнения: фланец, лапы, комбинированный.Крупные двигатели используют только на лапах. Современные производители часто выпускают электродвигатели комбинированные — фланец плюс съемные лапы. |
| Габарит | DM 225 L (указано значение для примера) | Цифра в названии почти любого ЭД обозначает растояние от вала до пола. Обычно принимает только стандартеные значения. |
| Мощность двигателя | кВт (киловатт),обозначается P | Механическая полезная мощность на валу электродвигателя. |
| Количество полюсов | От 2 до 8 обычно | Количеству полюсов соответствует обороты. Смотри описание ниже. |
| Частота вращения | Об/мин | Частота вращения вала (скорость) — величина, равная кол-ву полных оборотов за ед. времени. Частота вр. Асинхронного Электродвигателя (АД) непосредственно связана с количеством полюсов обмотки: 2 полюса = 3000 об/мин; 4 = 1500 об/мин; 6 = 1000 об/мин; 8 = 750 об/мин; 12 = 500 об/мин. |
| Номинальное напряжение | В (вольт), обозначается U | Напряжение трехфазных машин — это линейное напряжение, т. е. напряжение между фазами сети, к которой подключен ЭД. На общепромышленных двигателях оно обычно равно 380В или 400В и 600В. Реже используется 220 В. Высоковольтные двигатели от 6000 В |
| Номинальный ток | А (амперы), обозначается Iн | Указывается номинальный ток, равный току в обмотках двигателя при выходе на нормальный режим работы.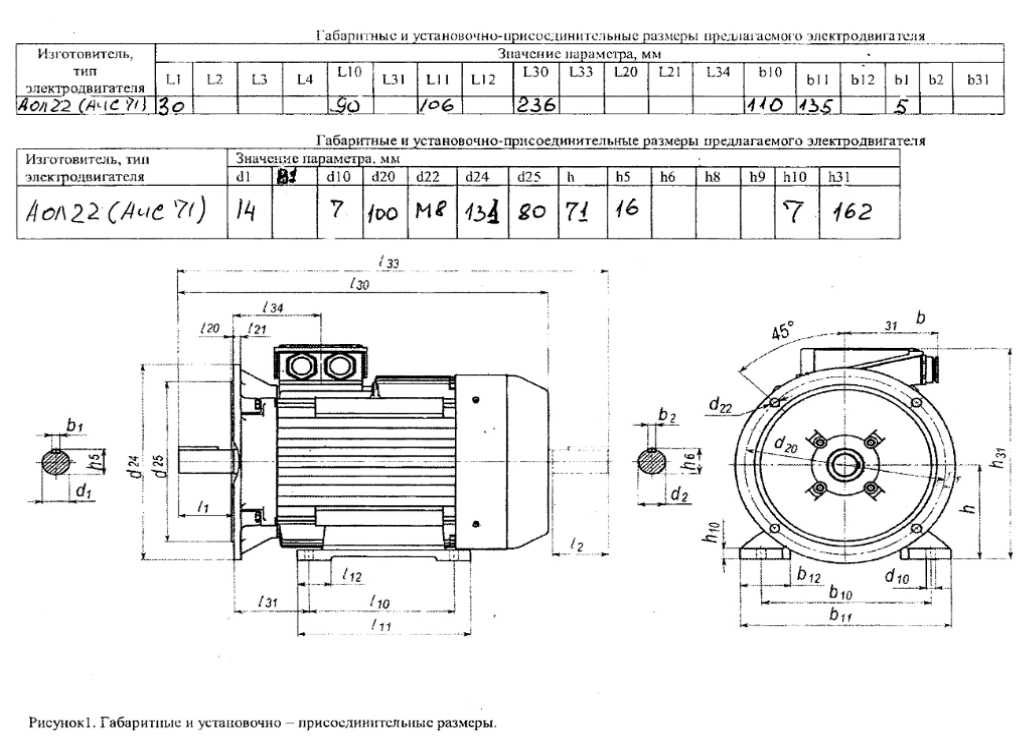 Пусковой ток всегда больше. Пусковой ток всегда больше. |
| Напряжения возбуждения (только для двигателей пост. тока) | Напряжение подающееся на якорь | Напряжение возбуждения всегда меньше напряжения номинального |
| Ток возбуждения (только для двигателей пост. тока) | Ток якоря | Ток возбуждения всегда меньше тока номинального |
| КПД электродвигателя | % (процент), обозначается ƞ | Отношение полезной мех. мощности на валу ЭД к активной подводимой элект. мощности. |
| Номинальный момент силы | Н*м (Ньютон-метр), обозначается Мн | Макс. вращающий момент на валу, развиваемый ЭД в установившемся режиме при номинальных напряжении и частоте. (При соединении обмоток, согласно номин. условиям работы, и для синхронных ЭД при номин. токе возбуждения.) |
| Момент инерции | Кг*м² (килограмм на метр в квадрате) | Является мерой инертности тела во вращательном движении вокруг оси.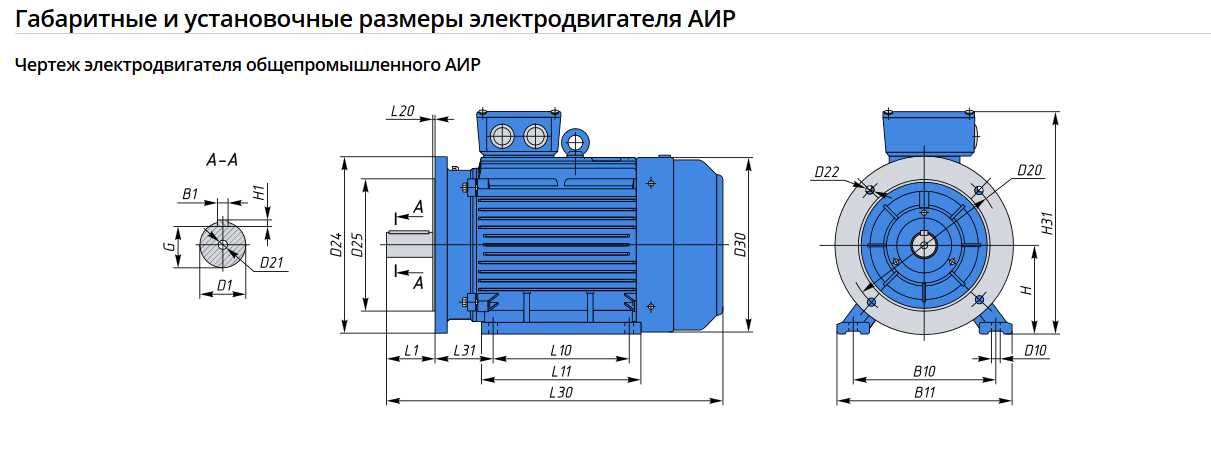 Равно сумме моментов инерции крыльчатки и ротора электродвигателя, Простыми словами — как сложно будет затормозить вал. Равно сумме моментов инерции крыльчатки и ротора электродвигателя, Простыми словами — как сложно будет затормозить вал. |
| Момент пусковой | Н*м (Ньютон-метр), обозначается Мstart | Вращающий момент ЭД при неподвижном роторе на момент начала движения. |
| Температурный режим | Нагрев двигателя в номинальном режиме | В — предельная t 130 С F — предельная t 155 С. Н — предельная t 180 С |
| Класс изоляции | Класс нагревостойкости | Обычно бывают B F H (130 155 180 градусов соответственно). Характерезует какую температуры выдерживает обмотка. |
| Способ запуска электродвигателя | Прямой/от частотного преобразователя | Двигатели допускающие прямой пуск должны выдерживать больший нагрев, поскольку температура при пусковых токах выше при прямом пуске. |
| Режим работы | Чаще всего это S1. Этот режим допускает неприрывную работу электродвигателя и температурный баланс с окружающей средой. Если двигатель часто запускается и не успевает охладиться, это может привезти к его выходу из строя. Этот режим допускает неприрывную работу электродвигателя и температурный баланс с окружающей средой. Если двигатель часто запускается и не успевает охладиться, это может привезти к его выходу из строя. |
|
| Схема подключения питания электродвигателя | Звезда/треугольник | Переключение между звездой и треугольником приводит к уменьшению пускового тока. |
| Направления вращения | Обычно в обе стороны допускается | Если на двигателе уставлены подшипники сколжения то обычно не принципиально направление вращение. Если стоят подшипники качения то может быть допустимо только одно направление. |
| Наличие датчиков | PTC100 | Датчики устанавливают в обмотки и подшипники. Их количество зависит от габарита двигателя. |
| Расположение клеммной каробки | Справа (указано значение для примера) | Обычно заводы могут изменить расположение. Исключение — взрывозащищенные двигателию. В взрывозащищенных двигателях вносить изменение в конструкцию сложно. По умолчание смотрят со стороны вала (ПКВ — приводный конец вала) Исключение — взрывозащищенные двигателию. В взрывозащищенных двигателях вносить изменение в конструкцию сложно. По умолчание смотрят со стороны вала (ПКВ — приводный конец вала) |
| Охлаждение | IC06 (указано значение для примера) | Описывает тиg охлаждения. Тесно связан с степенью защиты. Охлаждение воздухом из окружающей среды не может обеспечить высокой класс защиты. Поскольку с воздухом может попасть пыль и влага. Подробнее в статье |
| Степень защиты | IP23 (указано значение для примера) | Указывает на защиту двигателя от поподания твердых предметов и влаги. |
| Класс взрывозащиты | Ex — обязательно указывается на шильде | PB Ex d I — для шахт Ex nA II T4 — искробезопасные двигатели |
| Наличие тормоза | Ed — добавляется к названию двигателя | Обычно тормоз можно добавить отдельно |
| Климатическое исполнение: допустимая температура и влажность | УХЛ 4 (указано значение для примера) | Применяется только в странах СНГ. Смотри в статье Смотри в статье |
| Тип подшипника | Роликовый и шариковый | При радиальных нагрузках на вал предпочтительней роликовые подшипгники |
| Смотровые окошки | Применяются для оценки износа щеток электродвигателей постоянного тока | |
| Антиканденсатная обмотка | Применятся для запуска в сложных климатических словиях |
Как определить параметры двигателя без шильдика?
Для замены или ремонта вышедшего из строя электродвигателя необходимо знать его характеристики. К основным параметрам двигателя относятся номинальная мощность, номинальный ток, напряжение питания, скорость вращения, схема подключения. Сведения о некоторых характеристиках содержатся на шильдике — табличке на корпусе двигателя. Однако иногда шильдик отсутствует, и параметры определяются по косвенным признакам.
Мощность и ток
Ориентировочно мощность электродвигателя можно определить по его габаритам и диаметру вала.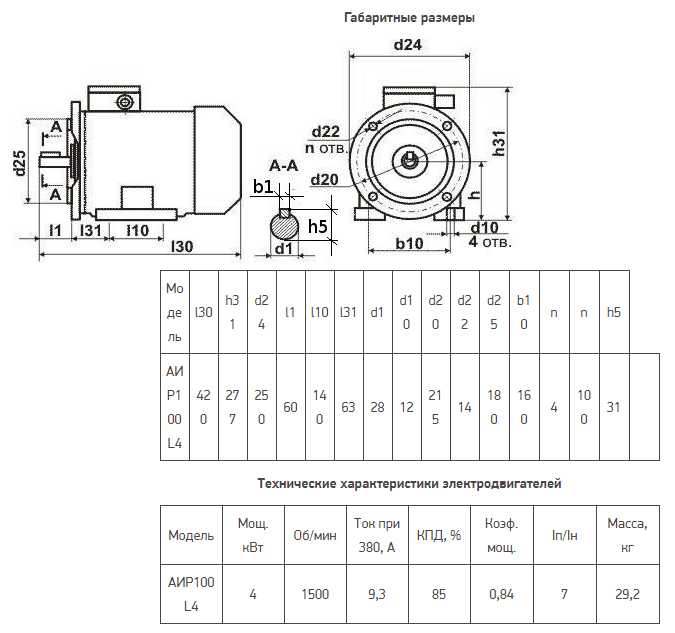 При одинаковых размерах и большем диаметре вала мощность на валу будет больше, а частота оборотов – меньше.
При одинаковых размерах и большем диаметре вала мощность на валу будет больше, а частота оборотов – меньше.
Если двигатель уже подключен, то примерная мощность определяется по уставкам защитных устройств, через которые он питается (мотор-автомат, тепловое реле). Если привод подключен через преобразователь частоты, мощность будет равна либо меньше мощности ПЧ.
Еще один способ – включить двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого нужно померить токоизмерительными клещами ток двигателя, который должен быть одинаков по всем обмоткам. На основании измеренного тока определяется мощность.
Также приблизительно оценить мощность асинхронного двигателя, подключенного по схеме «звезда», можно, разделив его номинальный измеренный ток на 2. Для двигателей менее 1,5 кВт из-за потерь ток нужно делить на 2,2…2,5, для мощности более 30 кВт этот эмпирический коэффициент будет равен 1,8…1,9.
Если нет шильдика, косвенно мощность можно определить и по сопротивлению обмоток, заодно проверив их целостность. Для этого необходимо измерить сопротивления при помощи омметра и сравнить их с сопротивлением двигателей известных мощностей, либо обратиться к информации от производителей.
Для этого необходимо измерить сопротивления при помощи омметра и сравнить их с сопротивлением двигателей известных мощностей, либо обратиться к информации от производителей.
Частота вращения
Как было сказано выше, частоту оборотов двигателя можно оценить по диаметру вала. Но есть и другие способы.
Согласно известной формуле, скорость вращения электродвигателя равна 60F/P, где F — частота питающей сети (50 Гц), Р – количество пар полюсов статора.
Полюсы можно посчитать, сняв переднюю или заднюю крышку. В двухполюсном электродвигателе (Р = 1) на каждую фазу приходится одна обмотка, содержащая 2 катушки, итого для трех фаз 6 катушек. Исходя из способа намотки нужно определить конфигурацию катушки, затем установить способ намотки всего статора. При количестве пар полюсов Р = 1 скорость вращения составит 3000 об/мин, при P = 2 – 1500 об/мин и так далее.
Отметим, что реальная скорость вращения двигателя отличается от расчетной за счет механических потерь и скольжения электромагнитного поля. У маломощных двигателей рабочая скорость под нагрузкой может быть ниже расчетной на 10-15 %.
У маломощных двигателей рабочая скорость под нагрузкой может быть ниже расчетной на 10-15 %.
Напряжение питания
Напряжение можно определить по схеме включения. Если двигатель подключен «звездой», его питающее линейное напряжение равно 380 В, а если «треугольником» – 220 В. Тогда в первом случае электродвигатель можно питать от сети напрямую, во втором – от однофазной сети через конденсатор или преобразователь частоты.
В большинстве новых двигателей для определения схемы включения достаточно вскрыть коробку борно. В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В двигателях, подвергшихся перемотке, схему собирают внутри, и из корпуса выводят три провода. В этом случае можно предположить, что напряжение питания равно 380 В и включить двигатель через защитный мотор-автомат. Если рабочее напряжение выше (660 В), двигатель будет вращаться замедленно, с пониженной мощностью. Если ниже (220 В), возникнет перегрузка, и сработает мотор-автомат, либо двигатель начнет перегреваться.
Заключение
Процесс определения параметров двигателя без шильдика часто бывает интуитивным, на основании опыта и последовательных измерений. Также важно при пробных включениях двигателя обеспечивать его защиту и электробезопасность.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Подбор импортного аналога двигателя АИР
ШАГ 6 — ПАРАМЕТРЫ ДВИГАТЕЛЯ (ПК)
Номинальное напряжение
Этот параметр будет зависеть от используемой версии прошивки. 60В, 72В или 84В номинал. Этот параметр не может быть изменен и предназначен только для информационных целей.
Номинальная мощность
не используется — Это никоим образом не меняет мощность установки. Он предназначен для информационных целей и обычно используется для пакетной обработки. Это не является показателем мощности используемой вами установки и не должно так считаться.
Пары полюсов
Можно изменить, чтобы отразить количество пар полюсов, используемых вашим двигателем. Это должно автоматически определяться контроллером и не должно изменяться. Двигатель KO Moto — 4. Стандартный двигатель Sur-Ron — 5, заводской двигатель Talaria — 5.
Это должно автоматически определяться контроллером и не должно изменяться. Двигатель KO Moto — 4. Стандартный двигатель Sur-Ron — 5, заводской двигатель Talaria — 5.
Direction (направление двигателя)
) 1 — позиция по умолчанию.
Motor Temp (Тип датчика температуры двигателя)
Какой датчик температуры используется в двигателе — Sur-Ron — это KTY84 — Двигатель KO Moto — это KTY84.
TempProtect — (защита двигателя от перегрева)
Установите на 140 градусов, в этот момент мощность дросселируется — клиенты не могут изменить это значение, и этот номер устанавливается на заводе.
AN (Тип волны — ослабление магнитного поля) (только для опытных пользователей)
Эта функция используется для контроля вибрации двигателя и изменения типа волны, используемой для ослабления магнитного поля. Вы можете изменить это число от 0 до 16 для достижения наилучших результатов. Мы обнаружили, что лучше использовать меньшее число, если вы используете систему высокой мощности. Примером этого является один из тестовых мотоциклов, который у нас есть, используя постоянный ток 300 ампер и фазу 800, мы используем AN, установленный на 2, чтобы ограничить вибрацию двигателя во всем диапазоне оборотов. В то время как в стандартном мотоцикле Sur-Ron будет использоваться значение около 4. Этот параметр, как правило, не следует изменять по сравнению со стандартным параметром для конкретной прошивки, но его можно настроить в определенных обстоятельствах.
Примером этого является один из тестовых мотоциклов, который у нас есть, используя постоянный ток 300 ампер и фазу 800, мы используем AN, установленный на 2, чтобы ограничить вибрацию двигателя во всем диапазоне оборотов. В то время как в стандартном мотоцикле Sur-Ron будет использоваться значение около 4. Этот параметр, как правило, не следует изменять по сравнению со стандартным параметром для конкретной прошивки, но его можно настроить в определенных обстоятельствах.
LM (Интервал волны — ослабление магнитного поля) (только для опытных пользователей) — эта настройка работает в сочетании с AM и изменяет интервал отправки волн. Это также можно использовать для предотвращения вибрации двигателя в вашей установке, но его следует использовать после того, как AM был отрегулирован и не дал желаемого эффекта. Этот параметр, как правило, не следует изменять по сравнению со стандартным параметром для конкретной прошивки, но его можно изменить в определенных обстоятельствах.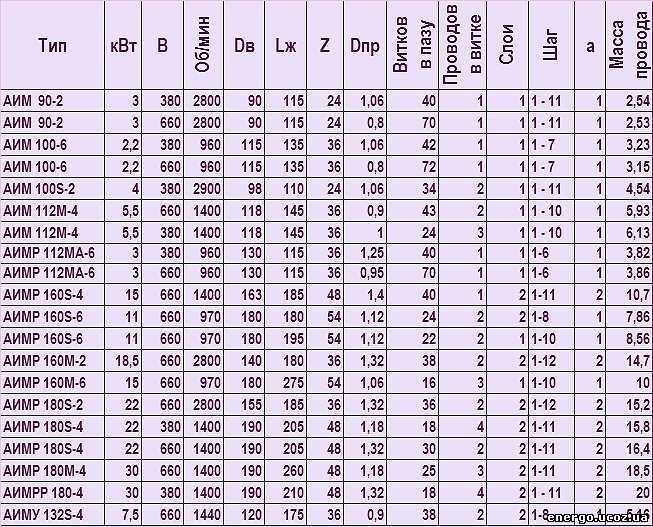
Позиция — не открыт показывает положение магнита — показания энкодера или датчика холла.
Коэффициент тока (регулировка мощности об/мин)
Отрегулируйте крутящий момент, передаваемый в диапазоне об/мин, путем ограничения доступного фазного тока в процентах. Это позволит вам отрегулировать ощущение крутящего момента мотоцикла во время начального ускорения и во время разгона двигателя до максимальных оборотов. Используемое значение должно находиться в диапазоне от 0 до 100. Мы бы посоветовали для достижения наилучших результатов иметь разумный плавный переход для использования на дороге и что-то более агрессивное для грязи. Важно отметить, что каждая трансмиссия в каждом велосипеде немного отличается, вы можете обнаружить, что на определенной скорости велосипед будет слегка трястись или дрожать при высокой фазе. Если вы обнаружите, что это происходит, то лучший способ — отрегулировать ограничитель фазного тока в сторону уменьшения примерно на 5-10%. Вы также найдете эту настройку очень полезной, чтобы дать вам уровень крутящего момента в начальном диапазоне оборотов 500 +1000, чтобы мотоцикл не чувствовал себя слишком рывком.
Вы также найдете эту настройку очень полезной, чтобы дать вам уровень крутящего момента в начальном диапазоне оборотов 500 +1000, чтобы мотоцикл не чувствовал себя слишком рывком.
Объяснение пяти основных изменений параметров VFD
Цели обучения
- Установка пяти параметров может помочь в программировании большинства VFD.
- Учитывайте метод управления ЧРП, FLA двигателя, время разгона и торможения.
- Также учитывайте скорость, источник работы и остальные неисправности.
Преобразователи частоты (VFD) — это электронные устройства, использующие быстродействующие переключатели или биполярные транзисторы с изолированным затвором (IGBT) для преобразования трехфазной входной мощности в переменную частоту и выходное напряжение для управления скоростью двигателя. Настройки частотно-регулируемого привода содержат программирование, и для большинства приложений учитываются изменения пяти параметров.
С помощью частотно-регулируемых приводов электродвигатели можно использовать для запуска широкого спектра приложений, чтобы обеспечить управление, невозможное при сквозной работе или механических средствах. Благодаря двигателям с частотно-регулируемым приводом пользователи могут оптимизировать эффективность системы, согласовывая скорость двигателя для поддержания точной потребности системы. Большинство применений частотно-регулируемого привода повышают эффективность системы и обеспечивают окупаемость инвестиций в энергосбережение, как правило, менее чем за год.
Благодаря двигателям с частотно-регулируемым приводом пользователи могут оптимизировать эффективность системы, согласовывая скорость двигателя для поддержания точной потребности системы. Большинство применений частотно-регулируемого привода повышают эффективность системы и обеспечивают окупаемость инвестиций в энергосбережение, как правило, менее чем за год.
Как и вся электроника, частотно-регулируемые приводы расширили свои возможности и функции, обеспечив больший контроль над системой, помогая исключить внешние устройства и программируемые логические контроллеры (ПЛК). Понятно, что благодаря этим инновациям перспектива программирования частотно-регулируемых приводов для их применения может быть ошеломлена. Однако в большинстве случаев для работы двигателя требуются только самые основные настройки. Это связано с тем, что частотно-регулируемые приводы разработаны и спроектированы таким образом, чтобы сделать сложное простым.
В большинстве случаев настроек частотно-регулируемого привода по умолчанию будет достаточно для приложения и не потребуется никакой корректировки.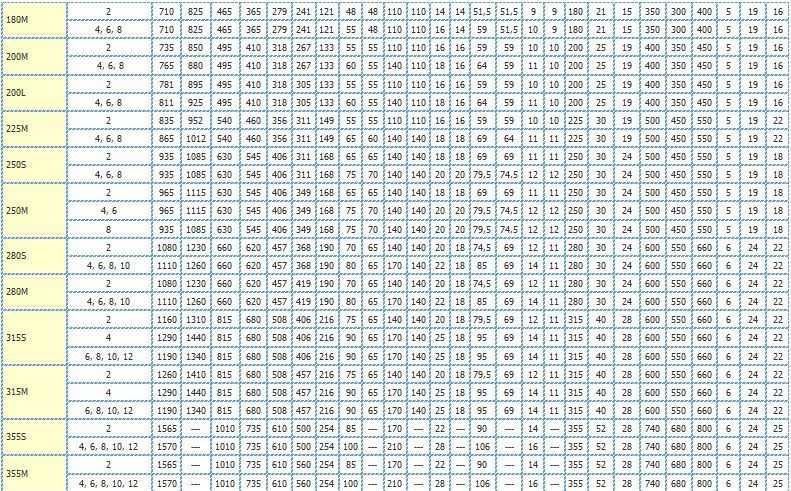 Обычно для приложения настраивается не более десятка настроек. Ниже приведен список из пяти основных настроек параметров, запрограммированных установщиками VFD, чтобы объяснить, что это за настройки и зачем они нужны.
Обычно для приложения настраивается не более десятка настроек. Ниже приведен список из пяти основных настроек параметров, запрограммированных установщиками VFD, чтобы объяснить, что это за настройки и зачем они нужны.
Влияние метода управления на программирование ЧРП
1. Что такое метод управления применительно к ЧРП?Первой настройкой, обычно устанавливаемой установщиками ЧРП, является метод управления. Метод управления определяет возможности привода по регулированию скорости двигателя. Эти возможности управления можно разделить на три группы: управление в вольтах на герц, векторное управление с автоматическим определением и векторное управление с обратной связью.
Управление напряжением на герц (V/f) является наиболее часто используемым методом управления двигателем. Это самая основная из трех топологий.
V/f-управление фиксирует выходной сигнал привода в соответствии с предопределенной кривой напряжения и частоты, чтобы двигатель двигался по мере изменения команды скорости ЧРП. Эти характеристики V/f можно отрегулировать, чтобы обеспечить высокий пусковой момент, или уменьшить, чтобы оптимизировать эффективность для нагрузок с переменным моментом, которые не требуют постоянного отношения напряжения к частоте.
Эти характеристики V/f можно отрегулировать, чтобы обеспечить высокий пусковой момент, или уменьшить, чтобы оптимизировать эффективность для нагрузок с переменным моментом, которые не требуют постоянного отношения напряжения к частоте.
Самоопределяющееся векторное управление — это метод управления, обеспечивающий более точное управление скоростью двигателя. Преобразователи частоты могут реализовать это управление, используя различные и сложные схемы управления. По сути, сложные алгоритмы используются для мониторинга, интерпретации и реагирования на текущую обратную связь, чтобы обеспечить точное управление двигателем. Однако самый простой способ рассматривать этот метод управления — рассматривать его как точное управление двигателем без необходимости использования энкодера.
Векторное управление с обратной связью — самый совершенный доступный метод управления двигателем. Как следует из названия, векторное управление с обратной связью использует энкодер двигателя для обеспечения точной обратной связи по скорости и устранения любых ошибок в управлении ЧРП, возникающих при реагировании на обратную связь по току. Добавление энкодера сообщает частотно-регулируемому приводу, что делает двигатель и как он реагирует на нагрузку.
Добавление энкодера сообщает частотно-регулируемому приводу, что делает двигатель и как он реагирует на нагрузку.
Зачем мне корректировать метод управления?
Настройка метода управления зависит от потребностей применения моторного привода. Некоторые приложения просты и должны работать только на приблизительной скорости, в то время как другим требуется точное и динамичное управление двигателем. Каждая из этих схем управления удовлетворяет потребности приложения и/или ограничивает программирование, необходимое для запуска и работы системы.
V/f-управление обычно используется для систем, не требующих точного управления скоростью, таких как вентиляторы или насосы. В самых основных методах управления V/f двигателю разрешается проскальзывать (дрейфовать) от заданной скорости. Небольшое изменение скорости мало влияет на общую производительность системы, потому что другие программы привода будут регулировать скорость для поддержания требований системы.
Например, если вентилятору предлагается работать на половинной скорости и он не может поддерживать потребность, то в большинстве системных конфигураций через ПИ-контур частотно-регулируемого привода или внешнее устройство будет повышать команду скорости, обеспечивая скорость двигателя, необходимую для удовлетворения потребности. . Управление V/f является наиболее часто используемым методом управления, поскольку для его реализации практически не требуется программирования.
. Управление V/f является наиболее часто используемым методом управления, поскольку для его реализации практически не требуется программирования.
Большинство производителей приводов, благодаря многолетнему опыту применения, уже имеют свои настройки по умолчанию для большинства применений с насосами и вентиляторами. Эти значения по умолчанию обеспечивают оптимальную экономию энергии практически без необходимости программирования. Даже приложения с непеременным крутящим моментом, такие как компрессор, могут использовать V/f-управление из-за его простоты настройки.
Самоопределяющиеся методы векторного управления улучшают управление технологическим процессом и сокращают объем технического обслуживания. Например, векторное управление с самоопределением регулирует скорость двигателя в пределах 1/200 от номинальной скорости двигателя, обеспечивает динамическое управление скоростью, высокий пусковой момент вплоть до низких скоростей и ограничивает ток и крутящий момент без внешних устройств. Чтобы обеспечить эти расширенные возможности управления двигателем, частотно-регулируемому приводу требуется информация о конкретных характеристиках двигателя, например, ток двигателя без нагрузки, сопротивление и индуктивность.
Чтобы обеспечить эти расширенные возможности управления двигателем, частотно-регулируемому приводу требуется информация о конкретных характеристиках двигателя, например, ток двигателя без нагрузки, сопротивление и индуктивность.
Чтобы получить эту ключевую информацию, частотно-регулируемый привод выполняет простую настройку двигателя, требующую ввода с клавиатуры основных данных с паспортной таблички двигателя, таких как номинальный ток, напряжение и скорость. Приложения, которые больше всего выигрывают от этого управления, включают смесители, стиральные машины и штамповочные/штамповочные прессы.
В векторном управлении с обратной связью добавлен сигнал обратной связи по скорости для максимального контроля процесса и минимизации технического обслуживания. Векторное управление с обратной связью обеспечивает точное регулирование скорости до одного об/мин, высокий пусковой крутящий момент при нулевой скорости, управление нулевой скоростью и регулирование крутящего момента. Эти функции используются в приложениях, которые не могут отклоняться более чем на несколько оборотов в минуту, иначе выход продукта не будет соответствовать проектным спецификациям.
Эти функции используются в приложениях, которые не могут отклоняться более чем на несколько оборотов в минуту, иначе выход продукта не будет соответствовать проектным спецификациям.
Например, многие экструдеры используют обратную связь от энкодера для поддержания скорости двигателя в точном соответствии с требованиями, чтобы продукт соответствовал спецификациям. Обратная связь от энкодера также обеспечивает точный контроль крутящего момента, что позволяет частотно-регулируемому приводу реагировать на условия высокого крутящего момента, которые могут привести к засорению или повреждению машины. Те же требования к настройке двигателя, что и при самоопределяющемся векторном управлении, требуются и при векторном управлении с обратной связью, чтобы оптимизировать управление двигателем и уменьшить компенсацию, необходимую для обратной связи энкодера.
Чем лучше ЧРП понимает характеристики двигателя, тем лучше он может управлять двигателем. Это верно как с обратной связью двигателя, так и без нее. В таких приложениях, как экструдеры, высокоскоростные шпиндели и разматыватели с постоянным натяжением, используется векторное управление с обратной связью.
В таких приложениях, как экструдеры, высокоскоростные шпиндели и разматыватели с постоянным натяжением, используется векторное управление с обратной связью.
Настройка частотно-регулируемого привода для тока полной нагрузки двигателя (FLA)
2. Что такое ток полной нагрузки двигателя? Поскольку для большинства частотно-регулируемых приводов настройка метода управления уже установлена по умолчанию для их наиболее распространенных применений, реальной первой настройкой, запрограммированной любым установщиком частотно-регулируемого привода, является значение тока полной нагрузки двигателя (FLA) или значение номинального тока двигателя. Двигатели рассчитаны на непрерывную работу при номинальных токах, указанных на паспортной табличке, при работе с номинальной мощностью и номинальным напряжением. Программирование частотно-регулируемого привода с номиналом FLA двигателя настраивает электронную тепловую перегрузку частотно-регулируемого привода для работающего двигателя.
Зачем мне устанавливать ток полной нагрузки двигателя?
Хотя частотно-регулируемые приводы являются естественными устройствами плавного пуска, номинальные токи двигателей могут превышать их номинальные токи в течение коротких периодов времени, например, во время пуска, ударной нагрузки, быстрого замедления или чрезмерных циклов работы. Однако высокие токи в течение длительных периодов времени приведут к чрезмерному нагреву двигателя, что может привести к сокращению срока службы и преждевременному выходу из строя. Условия блокировки ротора также могут возникать из-за механического повреждения нагрузки или муфты. Изнашивание под нагрузкой со временем также может привести к увеличению потребления тока, которое может превышать FLA двигателя.
Чтобы избежать отказа двигателя, установка FLA двигателя ЧРП должна быть запрограммирована для FLA, указанного на паспортной табличке двигателя. Включение электронной защиты от тепловой перегрузки частотно-регулируемого привода в приводе удовлетворяет требованиям к защите двигателя от перегрузки, требуемым Национальным электротехническим кодексом (NEC) и местными нормами. Использование электронной тепловой защиты частотно-регулируемого привода позволяет пользователю устранить механическую перегрузку двигателя, что устраняет затраты, потенциальную точку отказа и любые требования к техническому обслуживанию, связанные с поддержанием целостности контактов защиты от перегрузки.
Использование электронной тепловой защиты частотно-регулируемого привода позволяет пользователю устранить механическую перегрузку двигателя, что устраняет затраты, потенциальную точку отказа и любые требования к техническому обслуживанию, связанные с поддержанием целостности контактов защиты от перегрузки.
Электронная функция защиты от перегрузки ЧРП оценивает уровень перегрузки двигателя на основе выходного тока, выходной частоты, тепловых характеристик двигателя и времени. Когда ЧРП обнаруживает перегрузку двигателя, срабатывает ошибка, и выход ЧРП отключается, чтобы защитить двигатель от перегрева.
Эти кривые перегрузки можно настроить в соответствии с возможностями двигателя. Многие двигатели насосов-вентиляторов рассчитаны на нагрузку с переменным крутящим моментом, что означает, что они не рассчитаны на номинальный ток при пониженной скорости.
Предусмотрены пониженные непрерывные перегрузки, чтобы сократить объем технического обслуживания и обеспечить максимальный срок службы двигателя. В частотно-регулируемых приводах предварительно настроены перегрузки для различных типов двигателей, включая нагрузки с переменным крутящим моментом в диапазоне скоростей 40:1, нагрузки с постоянным крутящим моментом в диапазоне скоростей 100:1 и нетрадиционные двигатели, такие как двигатели с постоянными магнитами (см. рис. 1).
В частотно-регулируемых приводах предварительно настроены перегрузки для различных типов двигателей, включая нагрузки с переменным крутящим моментом в диапазоне скоростей 40:1, нагрузки с постоянным крутящим моментом в диапазоне скоростей 100:1 и нетрадиционные двигатели, такие как двигатели с постоянными магнитами (см. рис. 1).
Время разгона и торможения
3. Что такое время разгона и торможения для системы моторного привода? ЧРП являются естественными устройствами плавного пуска. Они уменьшают пусковой ток при изменении скорости. Для этого частотно-регулируемый привод запускает и останавливает двигатель в соответствии с запрограммированным временем разгона и торможения. Это время или скорость линейного изменения определяют, сколько времени потребуется приводу для перехода от нулевой скорости к максимальной частоте. Могут быть фиксированные скорости или несколько наборов скоростей, которые регулируются в зависимости от условий работы или с помощью команд, отправляемых на ЧРП (см. рис. 2).
рис. 2).
Зачем устанавливать время разгона/торможения?
Использование подходящего времени разгона и торможения значительно снизит пусковой ток при пуске и скачки тока при изменении скорости. Это приводит к увеличению срока службы двигателя (меньше тепла) и трансмиссии (меньше динамических изменений крутящего момента). VFD также изолирует эти токи от линии. Таким образом, трансформатору не нужно создавать большие скачки напряжения, которые могут вызвать ненужный нагрев или повлиять на его питающее напряжение, что может повлиять на работу ЧРП или другие нагрузки в системе. Меньшие пусковые токи означают, что плата за потребление коммунальными службами из-за скачков тока/мощности исключается.
ЧРП по умолчанию настроены на наиболее часто используемые времена разгона и торможения в зависимости от их предполагаемого применения. Приводы вентиляторов/насосов будут иметь более длительное время изменения скорости, в то время как промышленные приводы общего назначения будут иметь более короткое время изменения скорости. Это помогает упростить процесс установки. Однако не все значения по умолчанию подходят для каждого приложения. Регулировка этих времен рампы потребуется, чтобы удерживать токи в пределах ограничений привода и двигателя.
Это помогает упростить процесс установки. Однако не все значения по умолчанию подходят для каждого приложения. Регулировка этих времен рампы потребуется, чтобы удерживать токи в пределах ограничений привода и двигателя.
В зависимости от инерции нагрузки можно запускать/останавливать нагрузку быстрее, чем это разрешено в зависимости от текущих возможностей привода/двигателя. Агрессивные скорости разгона/торможения приведут к более высоким токам, которые могут вызвать нагрузку на привод и двигатель и привести к перегрузке или перегрузке по току. Установка правильного времени разгона и торможения обеспечивает правильную работу системы и отсутствие сбоев в работе.
Опорные точки на кривой ускорения/замедления находятся в начале и конце каждой рампы. Именно здесь требуется наибольший крутящий момент или ток для выполнения желаемого двигателя. Таким образом, в ситуациях, когда общее время рампы должно оставаться низким, можно внести коррективы в эти точки, чтобы уменьшить общее время рампы. Эти точки называются регулировкой времени рывка или s-образной кривой. Эти настройки продлевают время в точках высокой нагрузки на рампе ускорения или замедления, чтобы уменьшить влияние на общее время пуска/остановки (см. рис. 3).
Эти точки называются регулировкой времени рывка или s-образной кривой. Эти настройки продлевают время в точках высокой нагрузки на рампе ускорения или замедления, чтобы уменьшить влияние на общее время пуска/остановки (см. рис. 3).
Для управления двигателем требуются скорость и источник работы
4. Что такое скорость и источник работы?ЧРП требует две вещи в каждый момент своей работы: команду запуска и задание скорости. Команда запуска сообщает приводу, что он должен управлять двигателем, а задание скорости сообщает частотно-регулируемому приводу, на какой частоте работать. Оба входа необходимы для управления двигателем. В противном случае двигатель простаивает. Настройка или отсутствие настройки — это один из наиболее распространенных обращений в службу технической поддержки по устранению неполадок, которые делает установщик VFD.
Зачем мне устанавливать скорость и запускать команду?
Настройка скорости ЧРП и команды запуска больше зависит от того, как пользователь выбирает запуск двигателя, а не от того, хотят ли они, чтобы двигатель работал. Большинство производителей по умолчанию используют свои приводы для работы с цифровыми и аналоговыми входами. Контакты и реле подключены к приводу для выполнения команды запуска привода. Затем аналоговые входы используются для подачи задания скорости на привод. Эти аналоговые опорные сигналы могут быть сигналами 0–10 В постоянного тока, +/–10 В постоянного тока, 0–20 мА или 4–20 мА. Каждый справочный источник имеет свою выгоду. Опорное напряжение легко генерировать и легко понять, в то время как сигналы тока распространяются на большие расстояния, и на них не оказывают влияния близлежащие электрические помехи. Другие способы управления осуществляются посредством прямого управления с клавиатуры или через сетевую связь.
Большинство производителей по умолчанию используют свои приводы для работы с цифровыми и аналоговыми входами. Контакты и реле подключены к приводу для выполнения команды запуска привода. Затем аналоговые входы используются для подачи задания скорости на привод. Эти аналоговые опорные сигналы могут быть сигналами 0–10 В постоянного тока, +/–10 В постоянного тока, 0–20 мА или 4–20 мА. Каждый справочный источник имеет свою выгоду. Опорное напряжение легко генерировать и легко понять, в то время как сигналы тока распространяются на большие расстояния, и на них не оказывают влияния близлежащие электрические помехи. Другие способы управления осуществляются посредством прямого управления с клавиатуры или через сетевую связь.
Каждое из этих заданий предоставляет частотно-регулируемому приводу точную скорость, необходимую для запуска двигателя. Чем точнее задание скорости двигателя частотно-регулируемого привода, тем точнее частотно-регулируемый привод удовлетворяет требованиям системы. Точное удовлетворение потребностей системы означает более высокие преимущества энергосбережения, достигаемые с помощью частотно-регулируемого привода. Целью любого командного интерфейса является обеспечение контроля, необходимого для системы, которая обеспечивает максимальную эффективность, качество и безопасность.
Точное удовлетворение потребностей системы означает более высокие преимущества энергосбережения, достигаемые с помощью частотно-регулируемого привода. Целью любого командного интерфейса является обеспечение контроля, необходимого для системы, которая обеспечивает максимальную эффективность, качество и безопасность.
Сброс ошибки
5. Что такое сброс ошибки на частотно-регулируемом приводе?Существует множество условий, внешних по отношению к приводу, которые могут привести к условиям эксплуатации, не соответствующим спецификациям. Чтобы продлить срок службы продукта и предотвратить отказ, частотно-регулируемые приводы включают и инициируют отказы, чтобы защитить себя. Примеры условий, которые могут вызвать отказ частотно-регулируемого привода, включают агрессивное время запуска, агрессивное время остановки, потерю мощности и состояние блокировки ротора.
Зачем устанавливать сброс ошибки при настройке ЧРП? Многие частотно-регулируемые приводы имеют функцию автоматического сброса неисправности. Эта функция позволяет приводу обнаруживать состояние, выходящее за рамки его программирования, и вызывать отказ, чтобы защитить себя, двигатель и остальную часть механической системы. Функция сброса отказа позволяет пользователю обнаруживать события и, если они устранены, возвращать привод в нормальный режим работы. Целью автоматического сброса является преодоление неприятных сбоев и поддержание непрерывной работы. Время простоя стоит денег, а функция автоматического сброса позволяет системе поддерживать работу в случае событий, которые не были сочтены необходимыми для остановки производства, до проверки сертифицированным персоналом.
Эта функция позволяет приводу обнаруживать состояние, выходящее за рамки его программирования, и вызывать отказ, чтобы защитить себя, двигатель и остальную часть механической системы. Функция сброса отказа позволяет пользователю обнаруживать события и, если они устранены, возвращать привод в нормальный режим работы. Целью автоматического сброса является преодоление неприятных сбоев и поддержание непрерывной работы. Время простоя стоит денег, а функция автоматического сброса позволяет системе поддерживать работу в случае событий, которые не были сочтены необходимыми для остановки производства, до проверки сертифицированным персоналом.
Примером этого может быть скачок напряжения, вызванный грозой. Это редкие случаи, которые не требуют дальнейшего анализа. Привод перестал работать в таком состоянии, тем самым защитив себя. Функция автоматического сброса позволяет накопителю начать резервное копирование без вмешательства пользователя, что экономит время и деньги.
Обязательно установите 5 верхних параметров ЧРП Существует множество способов реализации технологии ЧРП для автоматизации управления двигателем.