
5.4. Регулируемый электропривод с обратными связями по току и скорости и суммирующим усилителем
Регулируемый электропривод с отрицательной обратной связью по скорости. Для получения достаточно большого диапазона регулирования скорости необходимо повышать жесткость механических характеристик и вводить в систему электропривода отрицательную обратную связь по скорости. Наличие главной обратной связи по скорости является наиболее характерной чертой электропривода с большим диапазоном регулирования скорости.
Схема регулируемого электропривода представлена на рис. 14.11. Двигатель М получает питание от силового преобразователя U. Скорость двигателя регулируется вниз от номинальной посредством изменения напряжения якоря Uя.
На валу двигателя установлен тахогенератор BR, напряжение которого поступает на регулятор скорости AR, который может работать в качестве П– или ПИ–регулятора.
Структурная схема регулируемого электропривода представлена на рис. 14.12. Пунктиром показана обратная связь, которая в этом варианте привода не используется.
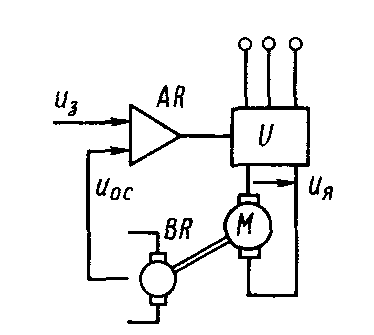
Рис. 14.11. Схема регулируемого электропривода
с обратной связью по скорости
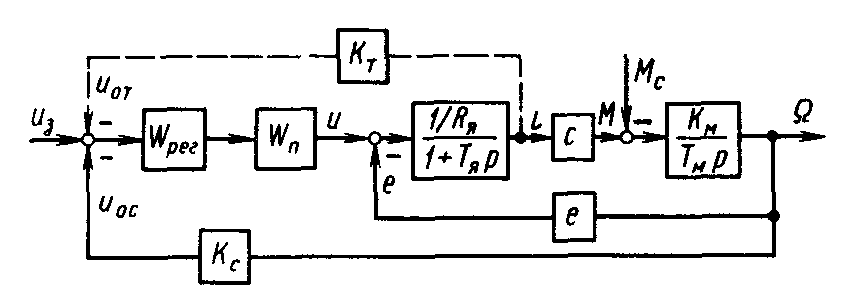
Рис. 14.12. Структурная схема регулируемого электропривода с обратной связью по скорости (цепь обратной связи по току показана пунктиром)
Составим уравнение, описывающее динамические процессы в приводе. Скорость двигателя постоянного тока зависит от напряжения якоря и момента сопротивления
 .
.
На этом основании для разомкнутой цепи регулируемого ЭП и
 ,
,
но
напряжение Uoc связано со скоростью двигателя  .
.
Подставив это значение в предыдущую формулу и решив ее относительно скорости, будем иметь

Регулируемый электропривод с обратной связью по скорости и току якоря. Кроме основной обратной связи по скорости в регулируемом электроприводе используют обратную связь по току якоря. Ток якоря пропорционален моменту, поэтому, управляя током, мы по сути дела управляем моментом ЭД и формируем силовое воздействие на механическую систему. Можно считать, что обратная связь по скорости определяет точность регулируемого электропривода, а обратная связь по току – его быстродействие.
Схема регулируемого электропривода с обратными связями по скорости и току представлена на рис. 14.13. Во многом эта схема совпадает со схемой, изображенной на рис. 14.11. Отличие заключается в том, что в цепи якоря установлен датчик тока ВА, сигнал которого поступает на регулятор А. В регуляторе (суммирующем усилителе) происходит алгебраическое суммирование задающего сигнала и сигналов обратной связи по току и скорости.
Воспользуемся структурной схемой, приведенной на рис. 14.13. с учетом пунктирной линии, образующей обратную связь по току.
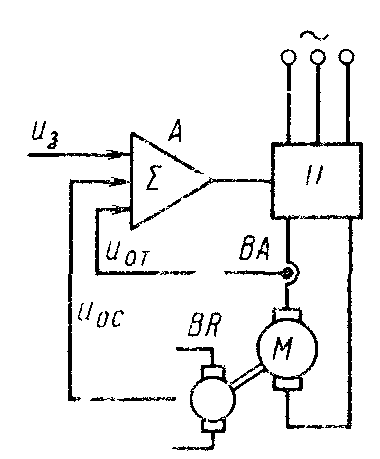
Рис. 14.13. Схема регулируемого электропривода с обратными связями
по скорости и току
Регулируемый
электропривод с обратной связью по
скорости и по току с отсечкой. В электроприводе станков и ПР широко
применяют системы привода, в которых
действует отрицательная обратная связь
по току с отсечкой. Нелинейная обратная
связь по току (рис. 4.22, а) действует
следующим образом: до тех пор, пока ток
якоря не превышает величины тока отсечки  ,
сигнал обратной связи равен нулю. Если
же
,
сигнал обратной связи равен нулю. Если
же  ,
то вводится в действие сильная
отрицательная обратная связь по току,
которая ограничивает величину тока
якоря на заданном уровне.
,
то вводится в действие сильная
отрицательная обратная связь по току,
которая ограничивает величину тока
якоря на заданном уровне.
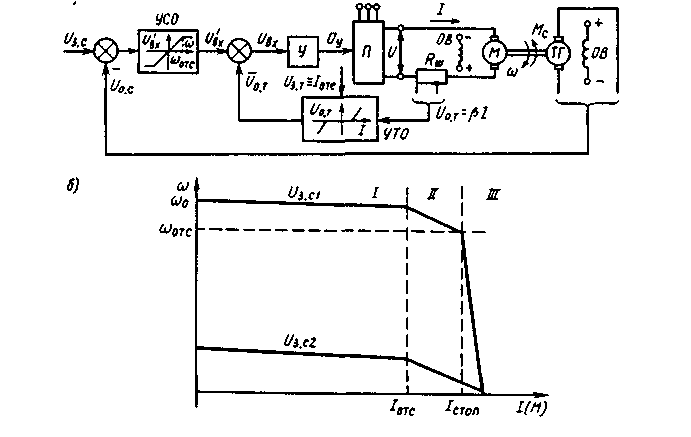
При постоянном магнитном потоке ограничение тока якоря эквивалентно ограничению момента. Поэтому механическая характеристика такого привода состоит из двух участков (рис. 14.14, б).
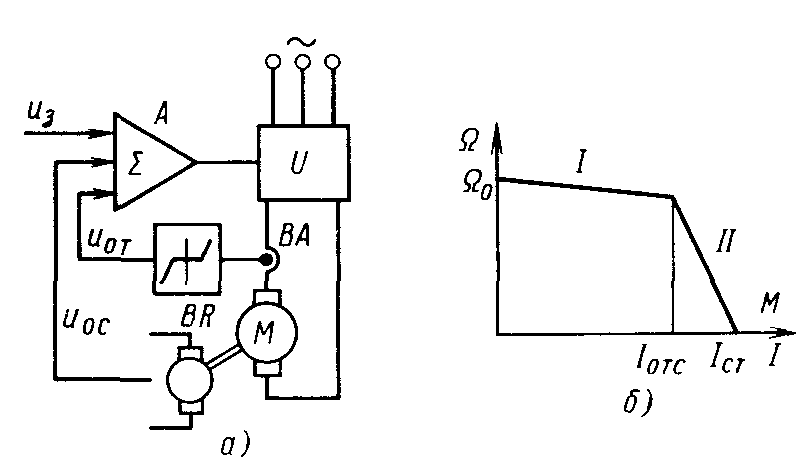
Рис. 14.14. Схема (а) и механическая характеристика (б)
электропривода с отсечкой по току
На первом участке в приводе действует только отрицательная обратная связь по скорости и жесткость механических характеристик велика. При больших моментах «срабатывает» отсечка по току и добавляется сильная отрицательная обратная связь по току, которая уменьшает выходное напряжение преобразователя и снижает жесткость механических характеристик. Наклон механических характеристик на втором участке резко увеличивается. Такие характеристики называют экскаваторными. Привод с отсечкой по току может работать на жесткий упор при = 0. Ток якоря при нулевой скорости привода называют током стопорения.
В
схемах отсечки по току (рис. 4.23, а)
напряжение, снимаемое с шунта, включенного
в цепь якоря двигателя  ,
сравнивается с опорным напряжением
uоп,
пропорциональным току отсечки.
,
сравнивается с опорным напряжением
uоп,
пропорциональным току отсечки.
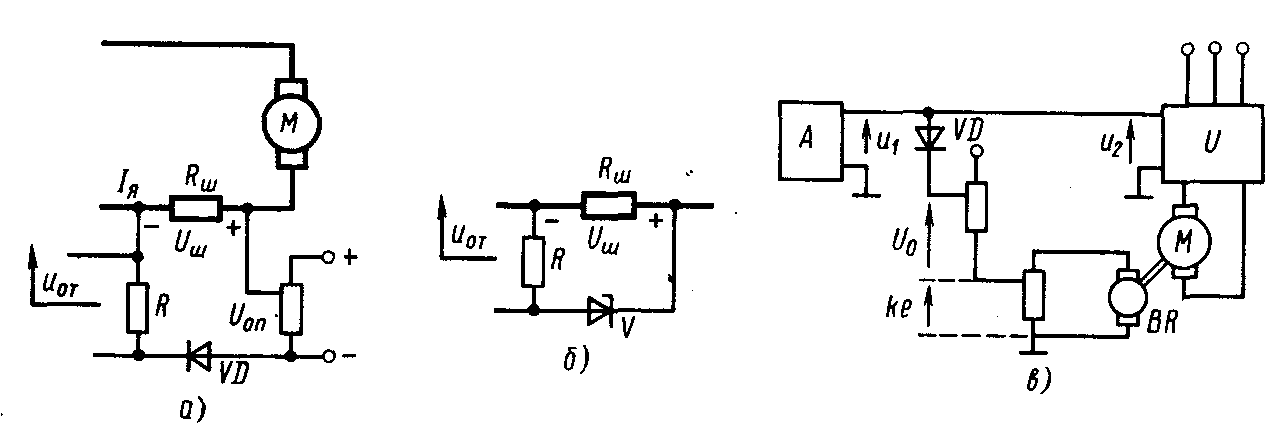
Рис. 14.15. Схемы отсечки по току: а – с диодом в качестве порогового элемента; б – со стабилитроном; в, г – с упреждающим токоограниченнем
Опорное
напряжение запирает диод VD.
В результате ток в цепи может протекать
только при 
В
схеме на рис. 4.23, б отсечка по току
осуществляется с помощью стабилитрона
V. При напряжении  происходит пробой стабилитрона и на
нагрузочном сопротивлении возникает
напряжение обратной связи.
происходит пробой стабилитрона и на
нагрузочном сопротивлении возникает
напряжение обратной связи.
Отсечка по току позволяет стабилизировать момент двигателя не только в статическом режиме при работе на упор, но и в динамическом режиме. Переходные процессы в таком приводе происходят с почти постоянным динамическим моментом. В приводах с малоинерционными тиристорными преобразователями токоограничение имеет особенно важное значение.
Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току
Эффективное и качественное регулирование координат в системе П — Д обеспечивает принцип подчиненного регулирования, реализуемый по структурной схеме, приведенной на рис. 11.4. Напомним, что этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.
Управление внутренним контуром с помощью выходного сигнала внешнего контура определяет еще одно ценное свойство таких систем. Оно заключается в возможности простыми средствами ограничивать любую регулируемую координату, например ток и момент, на заданном уровне. Для этого требуется всего лишь ограничить сигнал, поступающий с внешнего контура.
Рассмотрим схему ЭП (рис. 11.26, а) с подчиненным регулированием, выходной регулируемой координатой которой является скорость. Управляющая часть схемы состоит из двух замкнутых контуров: контура регулирования тока (момента), содержащего регулятор тока РТ и датчик тока ДТ, и контура регулирования скорости, содержащего регулятор скорости PC и датчик скорости (тахогенератор) 77″.
Регуляторы тока и скорости в большинстве схем ЭП этого типа выполняются на базе операционных усилителей. Включение в цепь задающего сигнала скорости i/ic регулятора скорости PC и его обратной связи резисторов RI и
При включении в цепь ОУ конденсаторов (реактивных электрических элементов) его функциональные возможности по преобразованию электрических сигналов становятся шире. Так, включение в цепь обратной связи регулятора тока РТ конденсатора С последовательно с резистором Roc2 позволяет получить на выходе РТсигнал в виде суммы двух составляющих:

где ку к4 — коэффициенты усиления сигналов.
Здесь сигнал U содержит пропорциональную и интегральную составляющие входного сигнала U , т.е. РТявляется в этом случае пропорционально-интегральным (П — И) регулятором.
По каким же критериям и условиям выбираются схема и параметры цепей того или иного регулятора? Основным условием здесь является желаемый (заданный) характер переходных процессов при регулировании координат. Из всех возможных их видов обычно выбираются переходные процессы с затухающими колебаниями (см. рис. 11.26, б), что является оптимальным в том смысле, что позволяет обеспечить устойчивость этих процессов при небольших длительностях и перерегулированиях.
Схема серийного электропривода типа ЭТЗР
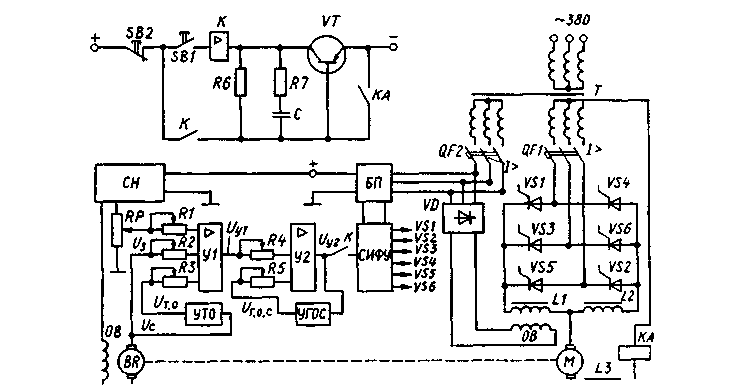
Для механизмов различных металлообрабатывающих станков, требующих регулирования скорости в диапазоне до 1000 при мощности до 11 кВт, используется серийный комплектный ЭП типа ЭТЗР (рис. 11.28). Электропривод этого типа выполнен в виде замкнутой системы регулирования с отрицательной обратной связью по скорости, которая в зависимости от настройки обеспечивает относительный перепад скоростей в пределах 0,5… 10% при изменении момента нагрузки от 0,1 Мном до Мном. В ЭП обеспечивается также регулирование (ограничение) тока с помощью устройства токоограничения УТО. Для обеспечения устойчивости и требуемого качества переходных процессов ЭП в схеме применяются гибкие обратные связи по скорости ДПТ и результирующему сигналу управления U.
Якорь двигателей серий ПБСТ, 2П или ПГТ, имеющих встроенный тахогенератор BR, получает питание от тиристорного преобразователя, содержащего силовую часть (тиристоры VS1… VS6) и СИФУ. Тиристоры VS1… VS6 силовой части соединены в две трехфазные нулевые схемы, образующие реверсивный преобразователь с двумя комплектами тиристоров, составляющих выпрямительную и инверторную группы. Управление этими группами осуществляется С использованием согласованного совместного принципа.
Для уменьшения переменной составляющей уравнительного тока, протекающего между выпрямительной и инверторной группами, в ЭП используются ограничительные реакторы L1 и L2. Включение в цепь якоря М сглаживающего реактора Li позволяет исключить режим прерывистого тока и повысить тем самым использование ДПТ.
Управление тиристорами VS1… VS6 обеспечивается транзисторной СИФУ, работающей по вертикальному принципу. Она имеет три канала, каждый из которых работает на два тиристора, включенных в одну фазу.
Питание ЭП осуществляется от трехфазного трансформатора Т с двумя вторичными обмотками. К одной из них, имеющей нулевой вывод, подключена силовая часть привода, а ко второй — через выпрямитель ВД — обмотка возбуждения ОВ и блок питания БП, от которого питается схема управления. Обмотка возбуждения тахо-генератора ОВ получает питание от стабилизатора напряжения СН.
В состав схемы управления ЭП входят промежуточный усилитель У1, усилитель мощности (эмиттерный повторитель) У2, узел токоог-раничения УТО, узел гибкой обратной связи УГОС, задающий потенциометр RP, кнопки управления SB1 и SB2 и пусковое реле К.
Сигнал управления U формируется как алгебраическая сумма сигналов задающего U, тахогенератора U и токоограничения Um, для выработки которого используется нелинейная положительная обратная связь по скорости ДПТ. При токе якоря, меньше тока отсечки, работает только контур регулирования скорости. При токе якоря, превышающем ток отсечки, за счет нелинейности цепи токоограничения отрицательная обратная связь по скорости ДПТ отключается и начинает действовать положительная обратная связь, обеспечивая ограничение тока и момента на заданном уровне.
Сигнал управления U вместе с сигналом корректирующей гибкой обратной связи U поступает на вход усилителя мощности У2 и после усиления в виде результирующего сигнала U 2 подается на вход СИФУ через замыкающий контакт пускового реле К. Управление этим реле осуществляется с помощью кнопок управления: SB1 используется при пуске ДПТ и SB2 — при его останове. Реверсирование ДПТ осуществляется изменением полярности задающего сигнала £/з.
В ЭП типа ЭТЗР осуществляется ряд защит, блокировок и сигнализаций. Токовое реле КА, катушка которого включена в цепь якоря ДПТ, а контакт — в цепь питания реле К, обеспечивает максимальную токовую защиту ДПТ. При его срабатывании отключается реле К, с тиристоров снимаются сигналы управления и ДПТ отключается от источника питания,
Автоматические выключатели QFI и QF2 осуществляют максимальную токовую защиту силовой части тиристорного преобразователя, обмотки возбуждения ДПТ и схемы управления.
Схема электрического привода с использованием микропроцессора
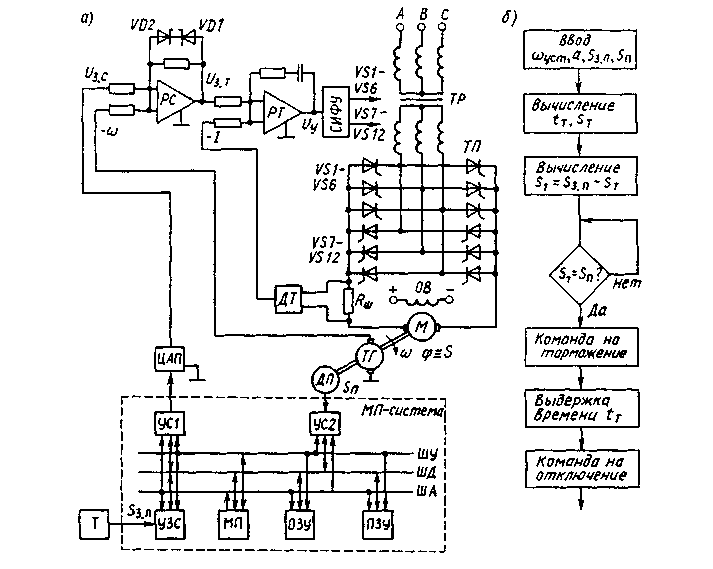
Рассмотрим схему ЭП с двигателем постоянного тока [19] для регулирования положения исполнительного органа робототехни-ческого устройства с использованием микропроцессорного управления (рис. 11.29, а). Этот ЭП должен обеспечивать перемещение и точное позиционирование исполнительного органа робота в соответствии с диаграммой, приведенной на рис. 3.3, для чего в нем используется обратная связь по положению. Для обеспечения высокой точности позиционирования в ЭП осуществляется также регулирование тока (момента) и скорости ДПТ.
Схема, приведенная на рис. 11.29, а, является характерным примером выполнения подобных схем с применением как аналоговых, так и цифровых узлов и устройств управления. Такие схемы, получившие название цифроаналоговых, существенно улучшают характеристики ЭП.
Силовая часть ЭП включает в себя трехфазный мостовой реверсивный тиристорный преобразователь 777, питаемый от трансформатора ТР. Схема управления построена по принципу подчиненного регулирования координат.
Регулирование тока производится аналоговым пропорционально-интегральным регулятором тока РТ, на вход которого поступают сигнал обратной связи по току от датчика тока ДТ и сигнал задания тока U , с выхода регулятора скорости.
Аналоговый пропорциональный регулятор скорости PC формирует сигнал задания тока U на основе своего задающего сигнала U , поступающего на него с внешнего контура положения, и сигнала обратной связи по скорости, вырабатываемого тахогенератором ТГ. Стабилитроны VD1 и VD2 ограничивают сигнал на выходе PC, т.е. обеспечивают ограничение тока и момента двигателя.
Регулирование положения осуществляется с помощью микропроцессорной системы, включающей в себя микропроцессор МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения УС1… УСЗ, цифровой датчик положения ДП и цифроаналоговый преобразователь ЦАП. Сигнал задания положения S3n поступает (задается) с терминала Т, подключаемого к микропроцессорной системе через УСЗ.
Работа цифрового регулятора положения на основе микропроцессорной системы может основываться на одном из двух принципов. Первый из них предусматривает реализацию статической характеристики регулятора в виде параболы, которая обеспечивает оптимальный график движения ЭП, показанный на рис. 3.3. Такой регулятор можно реализовать программным путем, записав в ПЗУ эту нелинейную характеристику.
Второй принцип работы РП основывается на вычислении момента начала торможения ЭП, что также позволяет получить показанные на рис. 3.3 кривые движения. Рассмотрим этот способ подробнее.
Реализация способа основана на том, что при известных установившейся скорости со ст и ускорении а = (М — Mc)/J, где / — момент инерции ЭП, могут быть рассчитаны время /т и путь Sr на участке торможения ЭП в конце отработки заданного перемещения S по следующим формулам:

Алгоритм работы микропроцессорной системы при выработке сигнала на торможение приведен на рис. 11.29, б. Для его реализации в микропроцессорную систему вводятся данные по величинам to , a, S и сигнал датчика положения Sп , пропорциональный текущему положению вала двигателя и исполнительного органа. Микропроцессорная система производит вычисление по (11.14) величин tT и Sзп иразности S1 = Sзп — Sт, Затем сопоставляется значение разности S1 с сигналом датчика положения Sn. Как только S] станет равной Sn, от микропроцессорной системы выдается команда на торможение ЭП, начинается отсчет выдержки времени tT и по истечении этого времени выработается команда на его отключение.
Замкнутая схема управления асинхронного ЭП, выполненного по системе «тиристорный регулятор напряжения — двигатель» (ТРН-АД)
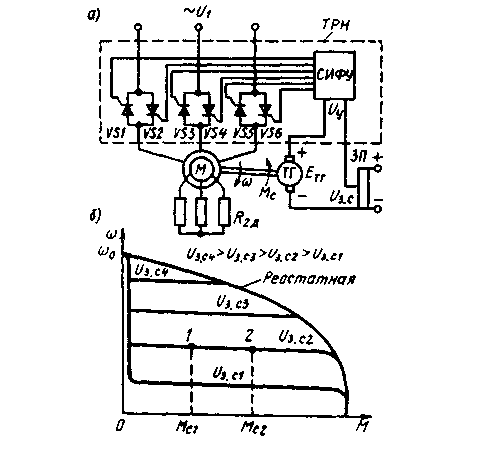
Рассмотрим схему регулирования скорости АД с контактными кольцами и обратной связью по скорости (рис. 11.30, а). В этой схеме между сетью и статором АД включен тиристорный регулятор напряжения ТРН, силовую часть которого образуют три пары соединенных встречно-параллельно тиристоров VS1… VS6. Управляющие электроды тиристоров подсоединены к выходам СИФУ, которая распределяет управляющие импульсы на все тиристоры и осуществляет их сдвиг в зависимости от входного сигнала управления U,. К валу двигателя для реализации обратной связи по скорости подсоединен тахогенератор ТГ, ЭДС которого Етг сравнивается с задающим напряжением скорости U ., снимаемым с задающего потенциометра ЗП. Эти напряжения действуют навстречу друг другу и их разность образует сигнал управления

который поступает на вход СИФУ. При увеличении этого сигнала угол управления тиристорами уменьшается, а подаваемое на двигатель напряжение увеличивается, и наоборот. Важно отметить, что при снижении скорости АД в цепи ротора выделяются потери мощности (потери скольжения), которые вызывают его дополнительный нагрев и снижают экономичность работы ЭП. Для облегчения теплового режима при работе двигателя на пониженных скоростях в цепь его ротора включается добавочный резистор R2 , наличие которого позволяет также расширить диапазон регулирования скорости.
Рассмотрим работу ЭП при изменении момента нагрузки Мс на валу двигателя и постоянном сигнале задания скорости /7зс2. Допустим, что в исходном положении АД работал в точке / с моментом нагрузки Мс1 (см. рис. 11.30,6), а затем произошло его увеличение до значения Л/,. В этом случае скорость начнет снижаться и соответственно начнет уменьшаться ЭДС тахогенератора Етг, что вызовет согласно (11.15) увеличение напряжения управления U и уменьшение угла управления тиристорами, а значит, приведет к увеличению подаваемого на АД напряжения. Момент АД будет увеличиваться и в точке 2 сравняется с моментом нагрузки M.v Таким образом, увеличение момента нагрузки приводит к небольшому снижению скорости АД, или, другими словами, его характеристики становятся жесткими. При уменьшении момента нагрузки Мс будет автоматически происходить снижение напряжения на АД, т.е. его скорость вращения будет поддерживаться на заданном уровне.
Изменяя с помощью потенциометра ЗП значение задающего напряжения скорости U , можно получить ряд механических характеристик электропривода с относительно высокой жесткостью и необходимой перегрузочной способностью АД.
Блок управления двигателем постоянного тока / Блог им. Sayron / Блоги по электронике
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
— СИФУ (Система Импульсно — Фазового Управления)
— Регулятор
— Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы.
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка
На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Схемы и перечень элементов
О приводе постоянного тока
Устройство двигателей постоянного тока
Двигатель постоянного тока (ДПТ) является электрической машиной, преобразующей электрическую энергию в механическую для осуществления технологических процессов в различных областях человеческой деятельности. Основными применениями в промышленности для ДПТ являются процессы, в которых необходимо поддерживать и регулировать скорость вращения вала двигателя независимо от величины нагрузки, например, в металлургии, станкостроении.
В соответствии с принципом действия, двигатели постоянного тока имеют три основных функциональных элемента: магнитную систему с постоянным или регулируемым магнитным полем, обмотку, в которой происходит преобразование энергии и расположенную на вращающейся части двигателя (якоре), и щеточно-коллекторный узел, преобразующий знакопостоянное напряжение на внешних зажимах в переменную ЭДС обмотки якоря.
Магнитная система двигателей постоянного тока включает в себя станину, главные полюса и якорь. Магнитная система может быть с постоянными магнитами и с электромагнитами. Массовое применение в промышленности нашли ДПТ с электромагнитами. Ниже речь идет о таких двигателях.
Станина имеет вид полого цилиндра и выполняется из чугуна или стали.
Главные полюса имеют вид буквы «Т» с вогнутой северху горизонтальной частью, повторяющей форму цилиндрического ротора. Причем эта часть называется полюсным наконечником, а вертикальная ножка – сердечником. На сердечнике наматывается обмотка возбуждения. Главные полюса выполняются шихтованными и набираются из листовой электротехнической стали толщиной в доли миллиметра. Они расположены внутри станины и прикреплены к ней с помощью болтов. Для повышения энергоэффективности и улучшения КПД станина и полюса могут выполняться шихтованными и представлять собой набор фасонных пластин.
Якорь имеет вид цилиндра и выполняется шихтованным. Пакет стали якоря напрессовывается на вал. По наружной цилиндрической поверхности якоря выполняются пазы, в которые укладываются проводники обмотки якоря.
Коллектор имеет вид цилиндра, набранного из медных пластин трапецеидального сечения. К пластинам припаиваются или привариваются концы секций обмотки якоря. Щетки представляют собой прямоугольные параллелепипеды и выполняются из проводящих материалов на основе графита. Щетки закреплены на станине и соединены электрически с выводами, расположенными в коробке на корпусе двигателя.
Двигатели постоянного тока бывают с независимым, последовательным, параллельным и смешанным возбуждением. Примером ДПТ с независимым возбуждением являются двигатели серий MM и MAG производства MAGNETIC.
Способы регулирования скорости ДПТ с независимым возбуждением
На рис. 1… 3 представлены электромеханические характеристики двигателя постоянного тока с независимым возбуждением – зависимость скорости вращения от тока якоря. Распространенной задачей при выполнении технологических операций является регулирование скорости ДПТ. Скорость двигателя постоянного тока с независимым возбуждением может регулироваться следующими тремя способами:
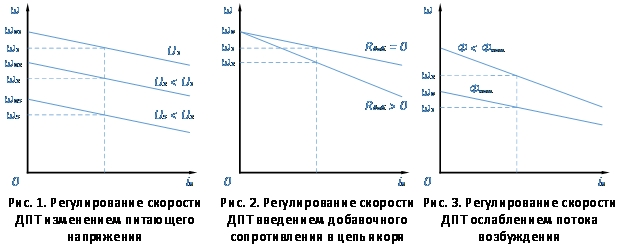
1. Изменение питающего напряжения позволяет изменить скорость идеального холостого хода, не меняя наклона электромеханической характеристики. При этом способе электромеханическая характеристика смещается параллельно самой себе, обеспечивая наибольший диапазон регулирования и наилучшие энергетические характеристики. Для изменения напряжения якоря нужен источник регулируемого напряжения.
2. Изменение сопротивления якорной цепи добавлением последовательно включенного реостата изменяет наклон характеристики при сохранении скорости идеального холостого хода. Данный способ вытесняется первым в связи со ступенчатостью регулирования и низкими энергетическими характеристиками из-за рассеивания энергии в сопротивлении реостата.
3. Увеличение магнитного потока вызывает насыщение магнитной системы, поэтому не применяется. Ослабление магнитного потока вызывает увеличение скорости идеального холостого хода и может быть использовано для работы на низких моментах нагрузки. Преимуществом регулирования тока возбуждения является то, что величина этого тока на двигателях средней и большой мощности в десятки раз меньше тока якоря, что позволяет использовать для регулирования скорости приводы меньшей мощности. Однако, диапазон регулирования скорости при этом способе меньше, чем при первом. Ослабление магнитного потока используют для расширения диапазона регулирования скорости совместно с изменением питающего напряжения.
Устройства для регулирования скорости ДПТ
Для регулирования скорости ДПТ разработаны различные электронные устройства, выполняющие не только основную задачу, но и обеспечивающие дополнительный функционал: защиты двигателя, автоматическую настройку под конкретный двигатель, измерение параметров, контроль режимов, выдачу предупредительной и аварийной сигнализации, управление вспомогательными устройствами. Хорошо освоенными являются тиристорные приводы с аналоговой или цифровой управляющей частью. Примерами первых являются приводы SLE, вторых – PL (двухквадрантный) и PLX (четырехквадрантный) производства Sprint-Electric.
Применение аналоговой управляющей части обеспечивает экономически эффективное решение для простых применений, где не требуется реверса двигателя приводного механизма. В этом случае импульсы управления формируются на основании сигналов задания и обратной связи, проходящих только через аналоговый тракт привода. Похожим образом обрабатываются сигналы для различных защит двигателя. Быстродействие привода обусловливается постоянными времени внутренних фильтров сигнала, а отсутствие встроенной программы позволяет использовать его в приложениях с повышенными требованиями к надежности.
Цифровая управляющая часть добавляет функционал, но и цена привода увеличивается. В этом случае обработку внешних сигналов в цифровой форме выполняет встроенный контроллер с интегрированным программным обеспечением, которое может быть более гибко сконфигурировано под конкретную задачу. Зачастую производители совершенствуют программное обеспечение своих изделий, выпуская так называемые «прошивки», расширяющие функционал готовых устройств. В аналоговых приводах расширить функционал готового устройства можно только изменением внешнего по отношению к приводу оборудования.
Типы датчиков обратной связи по скорости
Для регулирования скорости служат так называемые датчики обратной связи. Сигнал с них при необходимости заводится в привод, представляя реальную скорость механизма. Это позволяет системе управления внести коррекцию в работу привода в случае отклонения желаемой скорости от заданной. Датчики скорости бывают аналоговыми, цифровыми и аналого-цифровыми или комбинированными.
Аналоговые датчики скорости – это тахогенераторы и резольверы. Тахогенератор представляет собой электрическую машину постоянного тока, ЭДС которой в рабочем диапазоне параметров пропорциональна скорости вращения вала. Внешнее питание тахогенератору не требуется. Резольвер является вращающимся трансформатором, амплитуда выходного напряжения которого зависит от входного напряжения и угла поворота ротора.
Цифровые датчики положения (энкодеры), используемые в качестве датчиков скорости, могут быть абсолютными и относительными. Абсолютные энкодеры и при пропадании и последующем восстановлении питания позволяют узнать текущее положение ротора. Относительные (инкрементальные) энкодеры позволяют определить только относительное положение при вращении ротора, выходным сигналом относительного энкодера являются два сдвинутых на четверть периода импульса и импульс нулевого положения. Сдвиг на четверть периода позволяет определить направление вращения, а импульс нулевого положения используется, например, для подсчета числа оборотов.
Абсолютные энкодеры бывают с выходным протоколом, который позволяет, кроме получения информации о положении ротора, изменять характеристики энкодера, проводить его диагностику и калибровку. Различными производителями поддерживается часть или все из представленных протоколов: SSI, BiSS interface, ISI, Profibus, Profinet, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, CANopen, EtherCAT, Endat and Hiperface. Наиболее распространены SSI и Endat.
Комбинированные энкодеры помимо сигналов протокола выдают также импульсы относительного положения или сигналы фаз для работы сервосистем.
Построение системы управления двигателем постоянного тока на базе PL\PLX
Рассмотрим пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX. На рис. 4 представлена схема подключения.
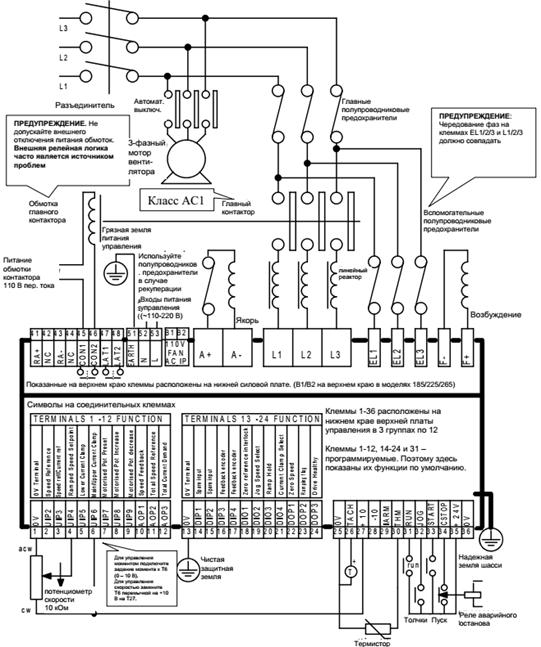
Рис. 4. Пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX
Основными компонентами системы управления ДПТ являются:
1.Привод постоянного тока, который обеспечивает регулирование тока якоря, скорости двигателя, защиты двигателя, управление внешними цепями и обеспечение возбуждения. Существет набор программных функциональных блоков, позволяющих гибко настроить привод под конкретные применения. Привод может быть оснащен модулями поддержки распространенных сетевых протоколов и поддерживает различные типы сигналов обратной связи. При пусконаладке и диагностике устройств на базе PL\PLX удобно использовать встроенную систему диагностики и осциллограф.
2.Главный контактор, назначение которого — физическое отсоединение якоря двигателя от источника питания. К контактору и его цепям управления предъявляются следующие требования: должна быть возможность отключения контактора без использования электроники, контактор не должен размыкать ток и цепь управления контактора должна соответствовать всем требованиям конкретной электроустановки. Блоки PL и PLX спроектированы для выполнения всех этих правил управления главным контактором. Обмотка реле подключена непосредственно к клемме CSTOP (останов по выбегу) T34 и зашунтирована конденсатором, в результате время отключения составляет около 100 миллисекунд. За счет этого у PL\PLX есть время снизить ток якоря до нуля перед размыканием контактов. Убедитесь, что обмотка контактора оснащена гасящим устройством.
3.Главные полупроводниковые предохранители. Они служат для защиты сети от пробоя тиристоров и для защиты привода от замыкания на стороне выпрямленного напряжения. Предохранители в цепи якоря нужны для защиты привода, у которого есть возможность рекуперации энергии в сеть – PLX. Необходимо учитывать рекомендации по приводам для правильного выбора предохранителей по величине I²T.
4.Линейный реактор, который сглаживает ток и уменьшает гармонические искажения напряжения питающей сети. Кроме того, индуктивность реактора позволяет компенсировать низкую индуктивность обмотки якоря и улучшить таким образом коммутацию тиристоров. Еще одной немаловажной функцией реактора является ограничение тока при коротких замыканиях на стороне якоря.
Распространенные вопросы при проектировании систем с приводами постоянного тока
1.Можно ли размыкать цепь питания катушки управления главного контактора кнопкой аварийного останова?
— Нет. Важно, чтобы привод сам контролировал главный контактор и не было другого внешнего воздействия на эту цепь. Аварийный останов должен быть подключен к клемме 34, останов выбегом (coast stop). Однако, если местные указания безопасности требуют необходимости разрыва цепи питания катушки главного контактора кнопкой аварийного останова, необходимо по крайней мере подать сигнал с блок-контакта контактора на клемму 31, пуск (run), чтобы привод имел возможность снизить ток перед отключением питания силового моста.
2.Необходимо ли использовать полупроводниковые предохранители?
— Безусловно, да. Это единственный способ защитить мост привода в случае сбоя в любом месте системы, и это гарантийное условие для привода. На рынке существуют определенные типы выключателей, которые, как утверждается, достаточно быстры для защиты полупроводников, но нам еще предстоит найти тот, который обеспечивает такую же защиту, как и корректно подобранный предохранитель. Стоит отметить, что максимальный номинальный ток предохранителя имеет второстепенное значение, в то время как он довольно велик, — предел тока привода и алгоритм блокировки достаточно сложны, чтобы защитить от повреждения при длительной перегрузке. Важной характеристикой предохранителей является величина I²T. Выраженный в A²с (амперы в квадрате, помноженные на секунды), это мера пропускания энергии, и максимально допустимое значение для любого привода приведено в таблице номиналов предохранителей в руководстве на привод. По сути, если величина I²T не указана в спецификации производителя плавких предохранителей, они вряд ли будут достаточными, даже если в описании производителя используется альтернативное имя, такое как «сверхбыстрый». Предохранитель по стороне переменного тока является обязательным во всех случаях, в то время как предохранители по стороне постоянного тока необходимо устанавливать только в системах, где возможна рекуперация энергии в сеть. Что касается предохранителей в цепи постоянного тока, следует соблюдать особую осторожность, т.к. применение для этих цепей предохранителей переменного тока даже с правильным значением I²T недопустимо.
3.Как сделать ослабление поля?
— Этот вопрос обычно сопровождается утверждением о том, что он оказался трудным и / или занимающим много времени на старых приводах. С цифровым приводом это сделать просто. Если вы правильно установили параметры BASE SPEED и TOP SPEED в CHANGE PARAMETERS, CALIBRATION и помните, что вы должны использовать либо тахогенератор, либо обратную связь с энкодером (ослабление поля не может работать только с обратной связью напряжения якоря), все, что вам нужно сделать, это перейти к CHANGE PARAMETERS, FIELD CONTROL, FIELD WEAKENING MENU, FIELD WEAKENING ENABLE и установить его в ENABLED. Этого будет достаточно в большинстве случаев. Для некоторых двигателей требуется профилирование тока якоря, чтобы улучшить коммутацию в области слабого поля, эту информацию следует запрашивать у производителей двигателей. Относящиеся к этому случаю параметры находятся в CHANGE PARAMETERS, CURRENT CONTROL, I DYNAMIC PROFILE.
Ведущий технический специалист ООО «Драйвика» Образцов П.С.
Привод электродвигателя постоянного тока
Общее понятие
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели — очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями — полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/
Рис. 1. Схема двигателя постоянного тока
При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Крутящий момент. Он прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря. Так же момент прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость. Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов). Это значит, что скорость прямо пропорциональна напряжению якоря, а также обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Управление двигателем постоянного тока
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.
Рис.2. Схема управления скоростью и моментом ДПТ
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.
Рис.3. Схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.
Рис. 4. Схема управления двигателем постоянного тока
Менять ли привод постоянного тока?
Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM — современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
Обращайтесь к нам, и мы поможем Вам приобрести немецкое качество по разумным ценам!
Настройка, монтаж и обслуживание от высококлассных специалистов.
3.4. СУЭП с положительной обратной связью по току якоря
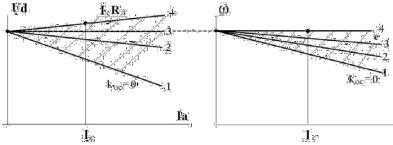
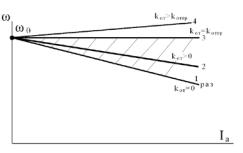
Рис.3.14. Внешние и электромеханические характеристики СУЭП с отрицательной обратной связью по скорости
На основании уравнения (3.14) можно реализовать заданную просадку ∆ωзам в системе с отрицательной обратной связью по
скорости выбором величины коэффициента усиления регулятора kр при известном kос, либо выбором kос при известном значении kр.
Пример 2. Для системы регулирования с параметрами Кп = 30, Кр=4, Δωзам/Δωраз = 0.6, с = 1.7 Вс определить вел ичину коэффициента обратной связи по скорости.
На основании (3.14) составляем равенство: 0.6(1 + КрКпКос/с) = 1, откуда получаем КрКпКос/с = (1 -0.6)/0.6 = 0,667, тогда коэффициент обратной связи по скорости будет равен: Кос=
0.667*с/(КпКр)=0.667*1.7/(30*4) = 0.0094 Вс.
Рассмотрим возможность применения положительной обратной связи по якорному току двигателя для получения заданной жесткости механической характеристики в замкнутых системах регулирования. Принципиальная электрическая схема СУЭП с положительной обратной связью по току якоря двигателя показана на рис. 3.15.
Для реализации обратной связи по току двигателя в якорной цепи установлен измерительный шунт RS, с которого снимается падение напряжения, пропорциональное величине тока якорной цепи. Так как падение напряжения на шунте невелико (стандартная величина падения напряжения равна 75 или 150 мВ), то для получения напряжения обратной связи по току Uот, соизмеримого по величине с напряжением задания Uз, применяют датчик тока ДТ, который усиливает входное напряжение (падение напряжения на шунте) до величины (8÷10) В, а
94
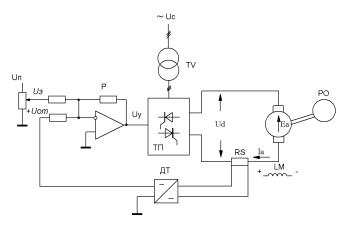
также обеспечивает гальваническую развязку силовых цепей от цепей управления.
Рис. 3.15. Принципиальная электрическая схема СУЭП с положительной обратной связью по якорному току
Для масштабирования тока якоря двигателя и напряжения обратной связи по току вводят коэффициент обратной связи по току,
который ставит в соответствие величине якорного тока напряжение обратной связи по току, и определяется равенством:
kот=Uотmax/Imax,
где Uотmax = (8…10) В – максимальная величина напряжения обратной связи по току,
Imax – максимальная величина тока якоря с учетом перегрузочной способности электродвигателя.
В данной системе регулирования на вход регулятора подается положительная обратная связь, т.е. полярность сигналов Uз и Uот одинаковая. Поэтому, при возрастании величины якорного тока двигателя, вызванного, например, увеличением нагрузки на валу двигателя, пропорционально величине якорного тока увеличивается падение напряжения на шунте RS и увеличивается напряжение обратной связи Uот на входе регулятора. Это приводит к увеличению напряжения UУ на выходе регулятора и увеличению ЭДС, а, следовательно, и напряжения тиристорного преобразователя, что обеспечивает
95
уменьшение просадки скорости, т.е. приводит к повышению жесткости механической характеристики электропривода.
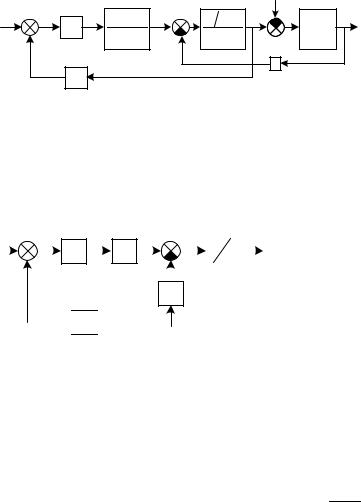
Структурная схема СУЭП с положительной обратной связью по току якоря двигателя приведена на рис. 3.16.
Uз |
| Рег | ТП |
| ЯЦ | Ia |
∆u | Uу | kп | Ed | 1 Rэ | ||
|
| kр | Тµр +1 |
| Тэр +1 |
|
| Uот |
|
|
| ||
| ДТ |
|
| Еа |
| |
|
| kот |
|
|
|
|
Ic | ЭМП |
| Rэ / с ω |
| Тмр |
с |
|
Рис. 3.16. Структурная схема СУЭП с положительной обратной связью по току
Для анализа статических характеристик электропривода в системе с положительной обратной связью по току воспользуемся вырожденной структурной схемой системы регулирования (рис. 3.17).
Uз Σ1 ∆u |
| Uу |
| Ed Σ2 Еа |
| ω | ||||||||||
kр | kп | 1c | ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| |||||
| Uот |
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
| Rэ |
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
| |||||
 kот
kот  Ic
Ic
Рис. 3.17. Вырожденная структурная схема СУЭП с положительной обратной связью по току
Аналогично выполняемому ранее, выведем передаточные коэффициенты по управляющему и возмущающему воздействиям. Приравняв нулю возмущающее воздействие (Iс =0), по схеме рис.3.17 легко можно получить выражение для передаточного коэффициента по управляющему воздействию (при этом видно, что при токе равном нулю,
система регулирования оказывается разомкнутой): KU = ω0 = kрkп ,
Uз с
96
откуда можно получить выражение для скорости идеального холостого хода, задаваемой величиной Uз на входе регулятора:
ω = U |
| kрkп | . | (3.15) |
|
| |||
0 | з с |
| ||
Приравняв нулю задающее воздействие (Uз = 0), по структурной схеме рис. 3.17 можно получить передаточный коэффициент по возмущающему воздействию, который состоит из двух составляющих, т.к. возмущение прикладывается к двум точкам приложения Σ1 и Σ2 с различными знаками:
| ∆ω |
|
| kрkпkот |
| R |
|
Kf = | зам = Kf1 | − Kf 2 | = |
| − |
| э . (3.16) |
с |
| ||||||
| Ic |
|
|
| с | ||
С учетом (3.15) и (3.16) уравнение электромеханической характеристики электропривода в данной СУЭП примет вид:
ω = ω − ∆ω |
| = U |
| kрkп | − I |
| (Rэ − kрkпkот ) | (3.17). |
|
|
|
| с | ||||
0 | зам |
| з с | c |
| |||
Из последнего уравнения видно, что применение положительной обратной связи по току, приводит к снижению статической просадки скорости в замкнутой СУЭП, т.е. к увеличению жесткости электромеханической характеристики (характеристика 2 на рис.3.18).
Если обеспечить равенство kрkпkот = Rэ , то получится
абсолютно жесткая электромеханическая характеристика (характеристика 3 на рис.3.18). Коэффициент обратной связи по току, обеспечивающий абсолютно жесткую электромеханическую характеристику, называют граничным, его величина равна:
kотгр = | Rэ | . | (3.18) |
| |||
| kрkп |
| |
97
Если величину коэффициента kот установить большей, чем kотгр (kот > kотгр), то статическая просадка скорости станет противоположного знака и электромеханическая характеристика примет вид характеристики 4 на рис.3.18, что соответствует неустойчивой работе электропривода, т.е. коэффициент kотгр соответствует граничному положению электропривода между устойчивым и неустойчивым состояниями.
Рис. 3.18. Электромеханические характеристикиСУЭП с положительной обратной связью по току
Как видно из (3.18) абсолютно жесткую электромеханическую характеристику в данной СУЭП можно получить при вполне конкретных
значениях коэффициентов kр и kот (т.е. kрkпkот не стремятся к
бесконечности). При этом положительная обратная связь по току вызывает увеличение напряжения ЭДС ТП пропорционально увеличению падения напряжения IRа, поэтому положительную обратную связь по току иногда называют в технической литературе «IR – компенсацией».
Положительная обратная связь по току, обеспечивающая устойчивую работу в статическом режиме, в динамике может привести к неустойчивой работе электропривода. Например, увеличение по какойлибо причине якорного тока, приведет к увеличению напряжения обратной связи на входе регулятора, увеличению результирующего сигнала на выходе регулятора, увеличению выходного напряжения ТП, дальнейшему увеличению якорного тока и т.д., вызывая лавинообразное возрастание якорного тока.
Поэтому на практике положительную обратную связь по току якоря применяют вместе с отрицательной обратной связью по скорости (напряжению). Отрицательная обратная связь по скорости (напряжению) не позволяет неограниченно увеличиваться якорному току, т.к. влияние отрицательной обратной связи сильнее, чем положительной. Например, для получения жесткости естественной электромеханической характеристики в СУЭП с комбинацией отрицательной обратной связи по
98

напряжению и положительной обратной связи по току якоря на долю повышения жесткости электромеханической характеристики за счет отрицательной обратной связи по напряжению приходится (70-80)%, а на долю положительной обратной связи по току якоря — оставшиеся (3020)%.
Пример 3. Для системы регулирования с параметрами Кп = 25, Кр=1, Rэ=0.25 Ом, Ra=0.15 Ом определить величину коэффициента положительной обратной связи по току якоря kот для обеспечения жесткости естественной электромеханической характеристики.
Т.к. жесткости естественной электромеханической характеристики соответствует статическая просадка скорости, равная Δωзам = IcRa/c, то на основании (3.16) и (3.17) можно составить уравнение Rэ-kрkпkот=Ra, откуда определяется необходимая величина коэффициента: kот=(Rэ-Ra)/kрkп=Rп/ kрkп=(0.25-0.15)/(25*1)=0.004 В/А.
Контрольные вопросы:
1.Как в электроприводе реализуется обратная связь по току якорной цепи?
2.Что определяет величину скорости вращения двигателя в установившемся режиме работы при постоянном напряжении задания на входе регулятора?
3.Почему в данной СУЭП возможно получение абсолютно жесткой механической характеристики электропривода (для ответа используйте внешние характеристики ТП)?
4.С какой целью в цепи обратной связи по току включают датчик
тока?
5.С какой целью в электроприводах применяют положительную обратную связь по току якоря?
6.Какое условие должно выполняться в СУЭП с положительной обратной связью по току для получения абсолютно жесткой механической характеристики двигателя?
7.Как определить величину граничного коэффициента положительной обратной связи по току?
8.Как определить величину коэффициента обратной связи по току, чтобы обеспечить жесткость естественной характеристики?
9.Почему положительную обратную связь по току применяют только в комбинации с отрицательными обратными связями?
10.Как получить уравнение внешней характеристики ТП в данной
СУЭП?
99
3.3.5. Усилительные устройства.
Усилительные устройства (промежуточные усилители) в электроприводах предназначены для усиления сигнала управления по напряжению. Усилитель выполняет также сложение сигналов управления с сигналами обратных связей и преобразование сигнала рассогласования при последовательных корректирующих цепях (см.§4.3). В электроприводах наибольшее распространение получили усилители постоянного тока с характеристиками, имеющими ограничение выходного напряжения.
Усилители постоянного тока выполняются на транзисторах и интегральных микросхемах. Основным недостатком усилителей постоянного тока являются дрейф нуля. Для исключения этого недостатка используют усилители с двойным преобразованием. Постоянный входной сигнал преобразуют в переменный, затем его усиливают с помощью усилителя переменного тока, в котором отсутствует дрейф нуля, и снова преобразуют в постоянное напряжение.
Параметры усилителей постоянного тока системы УБСР различного исполнения приведены в приложении 5.
Коэффициент усиления усилителя выбирается на основе статического расчета электропривода и округляется в большую сторону.
При выборе коэффициента усиления усилителя необходимо помнить, что увеличение коэффициента усиления приводит не только к повышению точности регулирования, но и ухудшает качественные показатели переходного процесса.
4. Динамический расчет автоматизированных электроприводов
Любая система автоматического управления, в том числе и автоматизированный электропривод, должна быть работоспособной. Необходимым и достаточным условием работоспособности является обеспечение требуемого качества процесса управления, в понятие которого, кроме точности системы в установившемся режиме, входит качество переходного процесса. Качество переходного процесса характеризуется временем регулирования и перерегулированием и достигается за счет введения в систему корректирующих устройств (регулятор) с определенными параметрами.
В настоящее время в электроприводе при создании систем регулирования нашел применение принцип последовательной коррекции или так называемого подчиненного регулирования.
4.1. Уравнение движения и структурная схема двигателя постоянного тока независимого возбуждения.
Работу электродвигателя можно описать системой уравнений
 (4.1)
(4.1)
при условии, что параметры двигателя постоянны, магнитный поток не зависит от нагрузки (отсутствует реакция якоря).
В системе уравнений (4.1) введены следующие обозначения:
 —
ЭДС двигателя и преобразователя;
—
ЭДС двигателя и преобразователя;
с = к•Ф – коэффициент, определяемый конструкцией двигателя;
Ф – магнитный поток;
М – электромагнитный момент двигателя;
МС – статический момент (момент нагрузки), приведенный к валу двигателя;
 — суммарный момент
инерции, приведенный к валу двигателя;
— суммарный момент
инерции, приведенный к валу двигателя;
 —
суммарные индуктивности и сопротивление
силовой якорной цепи системы
преобразователь–двигатель.
—
суммарные индуктивности и сопротивление
силовой якорной цепи системы
преобразователь–двигатель.
На основании приведенной системы уравнений (4.1) легко можно составить структурную схему двигателя постоянного тока независимого возбуждения, которая изображена на рис.4.1.
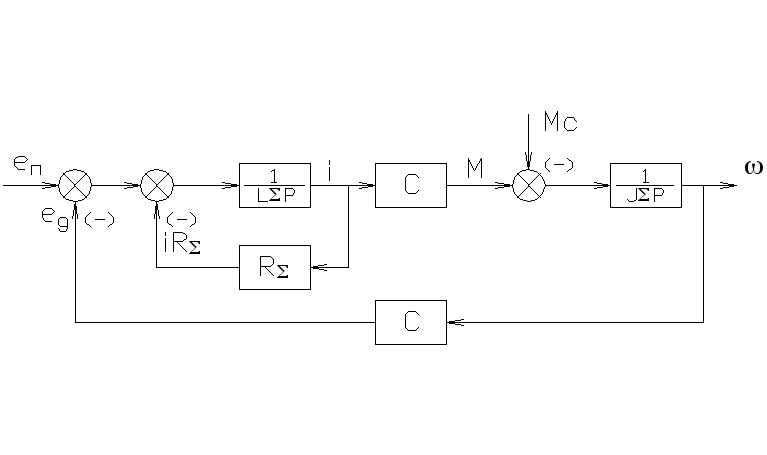
Рис.4.1. Структурная схема двигатель постоянного тока.
После преобразований структурная схема двигателя, питаемого от тиристорного преобразователя, примет вид, показанный на рис.4.2,
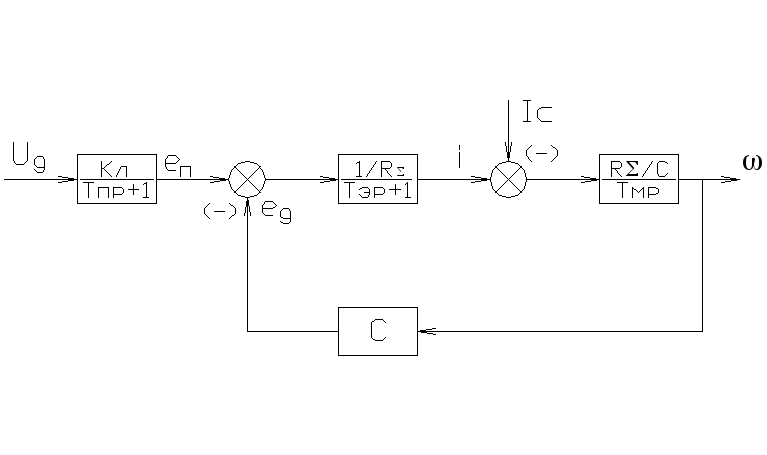
Рис.4.2. Структурная схема двигателя с тиристорным преобразователем
где 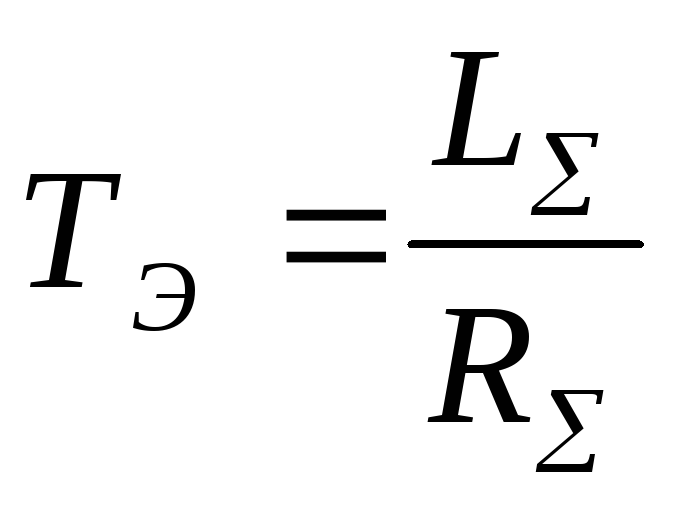 —
электромагнитная постоянная времени;
—
электромагнитная постоянная времени;
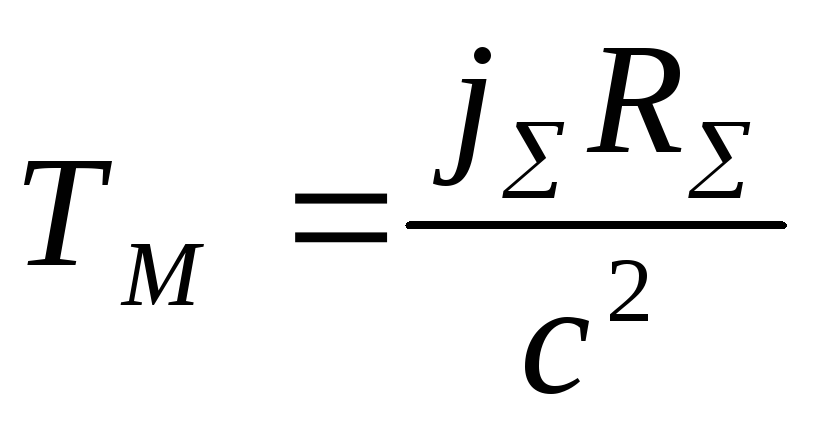 —
электромеханическая постоянная времени;
—
электромеханическая постоянная времени;
IC – статический ток;
ТП – постоянная времени преобразователя.