
3.6. Механические характеристики синхронного двигателя
С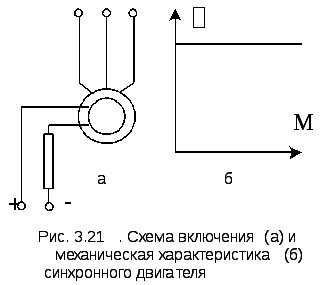 инхронные
двигатели, если они работают при
постоянной частоте с неизменной угловой
скоростью, применяются для приводов,
не требующих регулирования скорости.
К таким приводам относятся: компрессоры,
холодильные машины, камнедробилки и т.
п. Основное достоинство синхронного
двигателя заключается в возможности
работать с высоким коэффициентом
мощности.
инхронные
двигатели, если они работают при
постоянной частоте с неизменной угловой
скоростью, применяются для приводов,
не требующих регулирования скорости.
К таким приводам относятся: компрессоры,
холодильные машины, камнедробилки и т.
п. Основное достоинство синхронного
двигателя заключается в возможности
работать с высоким коэффициентом
мощности.
Угловая
скорость синхронного двигателя (рис.
3.26, б) при работе в установившемся режиме
с возрастанием нагрузки на валу до
определенного значения, не превышающего
максимального момента  ,
остается строго постоянной и равна
синхронной угловой скорости.
,
остается строго постоянной и равна
синхронной угловой скорости.
П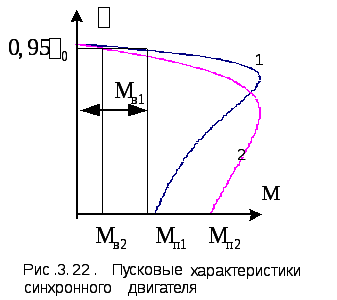 оэтому
механическая характеристика его имеет
вид прямой линии, параллельной оси
абсцисс. Если момент нагрузки превышает
оэтому
механическая характеристика его имеет
вид прямой линии, параллельной оси
абсцисс. Если момент нагрузки превышает , то двигатель может выпасть из синхронизма.
, то двигатель может выпасть из синхронизма.
С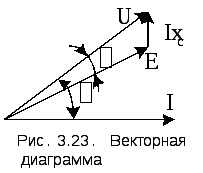 овременные
синхронные двигатели имеют в роторе
кроме нормальной рабочей обмотки,
питаемой постоянным током, еще и
специальную пусковую короткозамкнутую
обмотку. С помощью этой обмотки двигатель
пускается в ход как асинхронный, и
поэтому в пусковых режимах он обладает
характеристикой асинхронного двигателя.
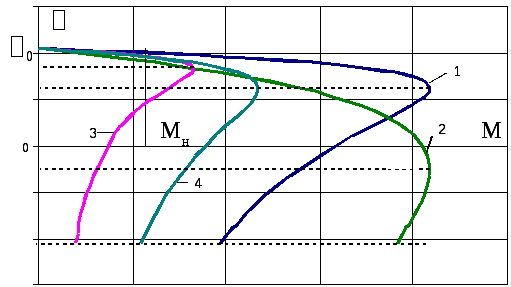
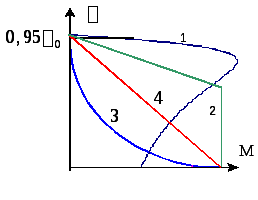
На рис. 3.22 представлены две пусковые
характеристики синхронного двигателя,
одна из них
овременные
синхронные двигатели имеют в роторе
кроме нормальной рабочей обмотки,
питаемой постоянным током, еще и
специальную пусковую короткозамкнутую
обмотку. С помощью этой обмотки двигатель
пускается в ход как асинхронный, и
поэтому в пусковых режимах он обладает
характеристикой асинхронного двигателя.
На рис. 3.22 представлены две пусковые
характеристики синхронного двигателя,
одна из них
 и значительным«входным» моментом
и значительным«входным» моментом , под которым понимается момент, развиваемый
при скорости, равной 0,95
, под которым понимается момент, развиваемый
при скорости, равной 0,95  .
При этой скорости возможно вхождение
двигателя в синхронизм после включения
постоянного тока в обмотку возбуждения.
.
При этой скорости возможно вхождение
двигателя в синхронизм после включения
постоянного тока в обмотку возбуждения. Если
пусковая клетка имеет увеличенное
активное сопротивление, то начальный
пусковой момент  будет больше, чем в предыдущем случае,
а входной момент
будет больше, чем в предыдущем случае,
а входной момент  уменьшится (кривая2 на рис. 3.22). Выбор одной из двух указанных
пусковых характеристик зависит от
моментов сопротивления,
которым обладают производственные
механизмы.
уменьшится (кривая2 на рис. 3.22). Выбор одной из двух указанных
пусковых характеристик зависит от
моментов сопротивления,
которым обладают производственные
механизмы.
Для
решения вопроса устойчивой работы
двигателя при пульсирующей нагрузке
необходимо знать зависимость момента 
 между напряжением и ЭДС двигателя (рис.
3.23.). Эта зависимость
между напряжением и ЭДС двигателя (рис.
3.23.). Эта зависимость
 носит название угловой характеристики
синхронного двигателя.
носит название угловой характеристики
синхронного двигателя.Уравнение угловой характеристики имеет вид

где  — максимальный момент
— максимальный момент
 ,
,
 —
ток короткого замыкания
—
ток короткого замыкания 
С
увеличением нагрузки угол  возрастает, что вызывает увеличение
момента двигателя и обеспечивает
равенство
возрастает, что вызывает увеличение
момента двигателя и обеспечивает
равенство
 условие
устойчивой работы нарушается, так как
при увеличении нагрузки угол
условие
устойчивой работы нарушается, так как
при увеличении нагрузки угол продолжает возрастать, а момент,
развиваемый двигателем, уменьшается,
вследствие чего двигатель выпадает из
синхронизма.
продолжает возрастать, а момент,
развиваемый двигателем, уменьшается,
вследствие чего двигатель выпадает из
синхронизма. Номинальному
моменту двигателя  практически
соответствует угол
практически
соответствует угол
 .
.Вопросы для самопроверки
4.1. Из приведенных уравнений выберите уравнение для расчета механической характеристики асинхронного двигателя, учитывающего активное сопротивление статора.
О т в е т | 1) | 2) |
3) | 4) |
Правильный ответ ____
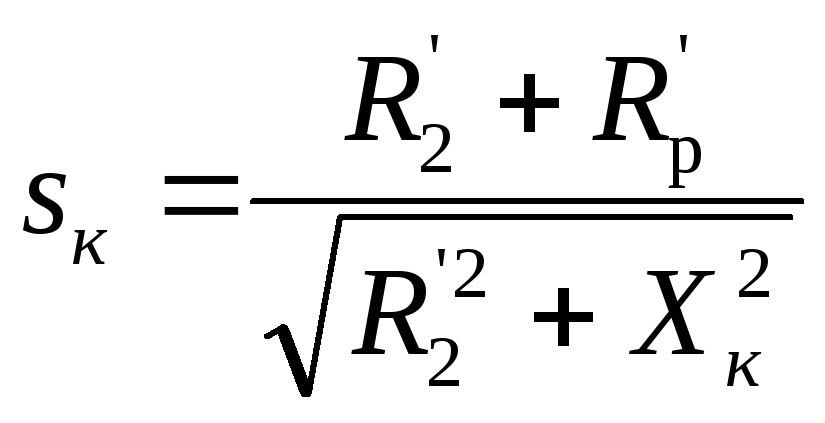
4.2. Из приведенных уравнений выберите уравнение для расчета критического скольжения асинхронного двигателя в двигательном режиме.
О т в е т | 1) | 2) |
3) | 4) |
Правильный ответ ____
4.3. Из приведенных уравнений выберите уравнение для расчета критического момента асинхронного двигателя в двигательном режиме.
Правильный ответ ____
4.4. Из приведенных уравнений выберите уравнение для расчета критического момента асинхронного двигателя в генераторном режиме.
О т в е т | 1) | 2) |
3) | 4) |
Правильный ответ ____
4.5. Из приведенных уравнений выберите уравнение для расчета критического скольжения асинхронного двигателя в двигательном режиме при введении в роторную цепь дополнительного сопротивления
О т в е т | 1) | 2) |
3) | 4) |

Правильный ответ ____
|
Правильный ответ ____
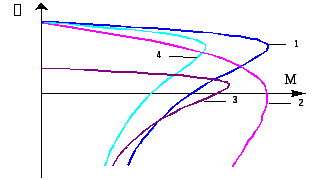
4.7. Из приведенных механических характеристик асинхронного двигателя выбрать реостатную характеристику. |
|
Правильный ответ ____
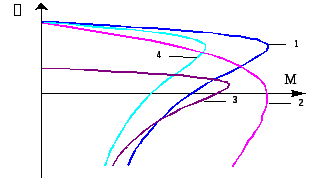
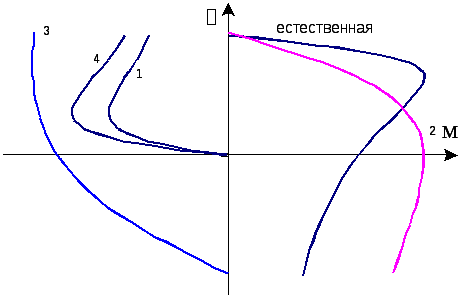
4.8. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику, снятую при пониженном напряжения питания |
|
Правильный ответ ____
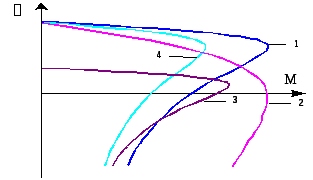
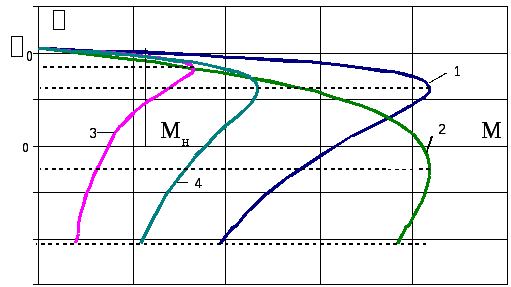
4.9.
Из приведенных механических характеристик
асинхронного двигателя выбрать
характеристику, снятую при пониженной
частоте напряжения питания при |
|
 .
.
Правильный ответ ____
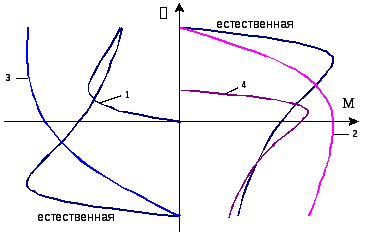
4.10. Из приведенных механических характеристик асинхронного двигателя выбрать реостатную характеристику при введении добавочного сопротивления в цепь статора |
|
Правильный ответ ____
4.11. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику в режиме динамического торможения. |
|
Правильный ответ ____
4.12. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику в режиме динамического торможения с большим током намагничивания в цепи статора. |
|
Правильный ответ ____
4.13. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику, снятую при пониженном напряжения питания. |
|
Правильный ответ ____
4.14. Из приведенных уравнений выберите уравнение для синхронной скорости и максимального момента синхронного двигателя.
Правильный ответ ____
4.15. Из приведенных уравнений выберите уравнение для расчета угловой характеристики неявнополюсного синхронного двигателя.
О т в е т | 1) | 2) |
3) | 4) |




Правильный ответ ____
4.16. Из приведенных механических характеристик электрических двигателей выбрать характеристику синхронного двигателя |
|
Правильный ответ ____
4.17. Из приведенных механических характеристик выбрать пусковую характеристику синхронного двигателя. |
|
Правильный ответ ____
Лекция 5
Лекция №5 Электромеханические характеристики синхронных электродвигателей
5.1 Принцип работы синхронного двигателя
Для нерегулируемых электроприводов большой мощности (свыше 160кВт) широко применяются синхронные электродвигатели с электромагнитным возбуждением. Схема включения такого двигателя показана на рис.3.23.
Конструкция статора синхронного двигателя аналогична конструкции статора асинхронного двигателя. Токи, протекающие по трехфазной обмотке статора, создают намагничивающие силы, результирующий вектор которых образует вращающееся в пространстве электромагнитное поле статора Ф,. Скорость вращения поля статора равна согласно (3.3)
и является рабочей скоростью синхронного двигателя.
На роторе синхронного двигателя расположена обмотка возбуждения, которая питается постоянным током от независимого регулируемого источника напряжения — возбудителя. Ток возбуждения создает электромагнитное поле Ф0, неподвижное относительно ротора и вращающееся в установившемся режиме вместе с ротором со скоростью а>0. Магнитные силовые линии поля ротора сцепляются с вращающимся синхронно с ним электромагнитным полем статора. Взаимодействие полей статора и ротора создает электромагнитный момент на валу синхронной машины.
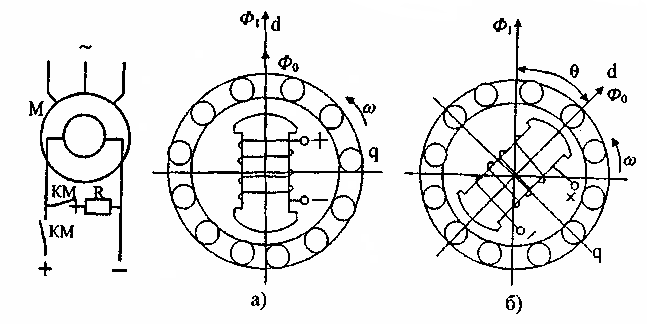
Рис.3.23. Схе- Рис.3.24. Пространственные векторы электро-
ма включения магнитных полей синхронного двигателя
синхронного а) идеальный холостой ход;
двигателя б) при нагрузке на валу
При отсутствии нагрузки векторы поля статора Ф1 и поля ротора Ф0 совпадают в пространстве (см. рис.3.24,а) и совместно вращаются со скоростью ω0. При появлении на валу двигателя момента сопротивления векторы Ф1, и Ф0 расходятся (как бы растягиваются подобно пружине) на угол θ, называемый углом нагрузки, причем, если вектор Ф0 отстает от вектора Ф1 (см. рис. 3.24,6), то синхронная машина работает в двигательном режиме и электромагнитный момент на ее валу положителен. Если синхронная машина работает генератором, приводимым во вращение первичным двигателем, то вектор поля ротора опережает вектор поля статора на угол (–θ ) и электромагнитный момент на валу машины отрицателен. Изменению нагрузки на валу машины соответствует изменение угла θ. Образно это соответствует растяжению-сжатию пружины. Максимальный момент Ммакс будет иметь место при θ – π/2 . Если нагрузка на валу машины будет больше Ммахс, то синхронный режим нарушается и машина выпадает из синхронизма.
Механическая характеристика синхронной машины представляют собой прямую, параллельную оси абсцисс и ограниченную значениями момента ± Ммакс (рис.3.25). Жесткость механической характеристики равна бесконечности.
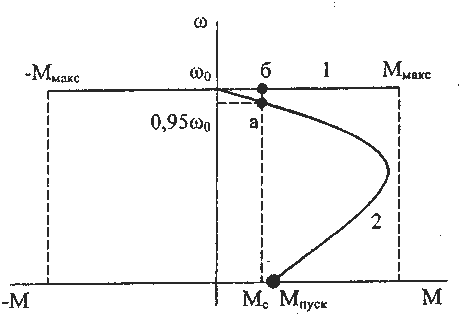
Рис.3.25. Механические характеристики синхронного двигателя
1 — характеристика синхронного режима
2 — пусковая характеристика (асинхронный режим)
Поскольку ротор двигателя вращается с синхронной скоростью и скольжение отсутствует, то вся мощность электромагнитного поля статора Рэм преобразуется в механическую мощность на валу синхронного двигателя. Если пренебречь потерями в статоре, то Рэм = 3U1I1 соsφ = Мω0, откуда
 (3.39)
(3.39)
Рассмотрим векторную диаграмму неявнополюсной синхронной машины (рис. 3.26). Двигатель с неявнополюсным ротором имеет симметричную в магнитном отношении конструкцию. Пренебрегая активным сопротивлением статора, получим Ů1 – Ė1 = jI1x1.
Здесь Е, – э.д.с., наводимая в обмотках статора вращающимся вместе с ротором полем Ф0.

Рис.3.26. Векторная диаграмма синхронного двигателя
Из векторной диаграммы следует:
U1 sin θ = I1x1 cos (φ – θ)
U1cos φ = E1 cos(φ – θ)
Подставляя эти значения в (3.39), получим выражение для угловой характеристики неявнополюсной синхронной машины
 (3.40)
(3.40)
Из этого выражения и соответствующей ему угловой характеристики (рис.3.27) следует, что по мере нагружения синхронной машины угол нагрузки увеличивается и момент достигает максимума при θ = π/2. Для сохранения постоянной перегрузочной способности двигателя предусматривается автоматическое увеличение тока возбуждения при приложении ударной нагрузки или снижении величины питающего напряжения.
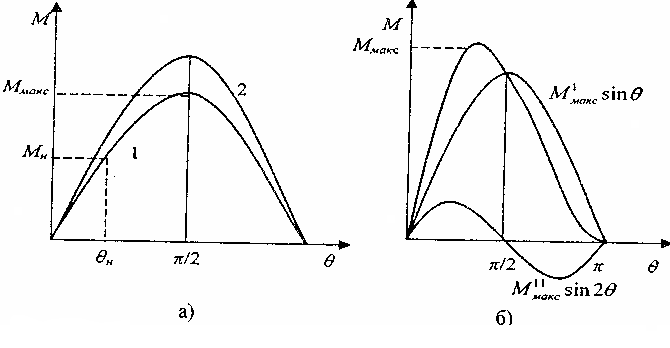
Рис.3.27. Угловая характеристика синхронного двигателя:
а) неявнополюсной машины; б) явнополюсной машины
1 — при номинальном потоке возбуждения;
2 — при форсировке возбуждения
Для синхронного двигателя явнополюсной конструкции, который имеет несимметричную магнитную цепь, кроме момента, вызванного полем ротора, возникает реактивный момент, определяемый стремлением ротора занять такое положение, при котором магнитная проницаемость для пути потока статора была бы максимальной. Угловая характеристика (см. рис.3.27,б) для такого двигателя описывается уравнением:
 +
+ 
где хd и хq– индуктивное сопротивление по продольной и поперечной осям.
Механические характеристики синхронных электродвигателей
Одним из главных свойств синхронных электродвигателей является то, что они вращаются со строго постоянной скоростью. И эта скорость определяется частотой сети и количеством пар полюсов машины. Механическая характеристика синхронного электродвигателя n=f(M) в пределах от холостого хода до выпадения двигателя из синхронизма представлена горизонтальной прямой (n0=const).
Момент, который развивает электродвигатель, определяется электромагнитным взаимодействием МДС статора с МДС ротора. Вращающееся магнитное поле статора «тянет» за собой постоянное магнитное поле ротора. Таким образом происходит вращение вала двигателя.
Векторная упрощенная диаграмма напряжений синхронной машины показана ниже:

Данная диаграмма не учитывает падение активного напряжения статора, но такое допущение при определении момента и мощности не вносит значительных ошибок в расчет. При таком допущении электромагнитная мощность машины будет равна мощности, потребляемой из сети:

Где m – количество фаз питающего напряжения, U,I – фазные токи и напряжения, cosφ – коэффициент мощности сети.
Проанализировав векторную диаграмму можно получить следующие выражения:

Подставив в формулу мощности значение угла φ получим:

Определи значения Iq и Id из формул выше и подставив в выражения мощности и упростив выражение получим:

Где: Р=Рэм – мощность электромагнитная или потребляемая;
U – напряжение в питающей сети;
E – ЭДС индуктированная;
Xd и Xq – сопротивление индуктивное продольной и поперечной оси;
Iq и Id — соответственно токи поперечных и продольных осей;
Выражение электромагнитного момента выглядит следующим образом:

Он состоит из двух слагаемых:
- ЭДС пропорционально индуктированной и sinθ, так называемого синхронного момента Мсин;
- Реактивного момента, который возникает в двигателях без возбуждения имеющих явнополюсную конструкцию;
В двигателях с неявнополюсной системой Xd = Xq, поэтому реактивный момент равен нулю.
При увеличении угла θ синхронный момент тоже будет расти. Его максимальное значение будет при θ=900, при дальнейшем увеличении θ момент синхронный будет уменьшатся. Можно сделать вывод, что устойчивая работа электродвигателя возможна при θ не более 900.
Если учесть возможность резкой неравномерности в нагрузке (изменения момента на валу), то угол θ стараются иметь в пределах θ=20÷300. При выполнении этого условия перегрузочная способность машины будет лежать в пределах:

В отличии от асинхронного двигателя момент синхронной машины пропорционален первой степени напряжения и первой степени ЭДС от магнитодвижущей силы основного возбуждения, соответственно в момент пиковых нагрузок перегрузочная способность синхронной машины может быть повышена путем увеличения тока возбуждения.
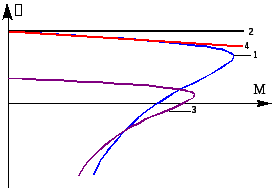
Зависимость электромагнитного момента и его составляющих – реактивного и синхронного, от угла θ показана ниже:

Из приведенной зависимости видно, что электродвигателя с явнополюсной конструкцией за счет влияния реактивного момента максимальное значение электромагнитного момента могут достигнуть в случае θмакс<900.
Механическая характеристика синхронного двигателя —
Синхронный двигатель состоит из статора с обмоткой, которая включается в сеть трехфазного тока и выполняет роль якоря машины, и ротора с обмоткой, которая получает питание от постороннего источника постоянного тока и выполняет роль индуктора машины.
Вращающий момент двигателя определяется по формуле
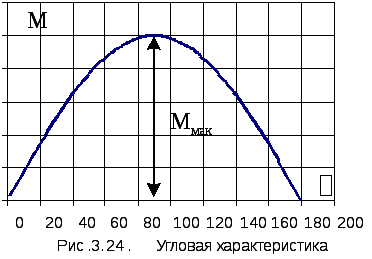
В синхронных двигателях с увеличением нагрузки частота вращения не меняется, а увеличивается угол 0, поэтому механическая характеристика будет абсолютно жесткой (рис. 7.4, а), а для определения величины моментов используют угловую характеристику синхронного двигателя (рис. 7.4,6)—зависимость М = Дв).
Из угловой характеристики видно, что в левой части ее с увеличением угла 0 момент вращения М увеличивается, в правой части с увеличением угла 0 момент уменьшается. Таким образом, устойчивая работа двигателя возможна только на левой части характеристики.
Обычно угол 0 — 20 — 30° соответствует номинальному моменту электродвигателя МНОм. Перегрузочная способность синхронного двигателя X = 2 ч- 2,5.
В зависимости от величины тока возбуждения двигатель может работать с cos q> меньше единицы (ток возбуждения меньше номинального) или равным единице (ток возбуждения равен номинальному). При перевозбуждении синхронный двигатель вырабатывает реактивную энергию и отдает ее в сеть переменного тока. Это свойство двигателя используется для улучшения cos ф сети.
Синхронные двигатели применяются для привода крупных, редко отключаемых машин (компрессоров, вентиляторов, насосов).
Регулирование частоты вращения двигателей переменного тока может быть осуществлено за счет изменения частоты тока, числа пар полюсов, включения в цепь ротора дополнительных активных сопротивлений, введения в цепь ротора дополнительной э. д. с. Для электродвигателей с короткозамкнутыми роторами возможности регулирования частоты вращения ограничены, так как изменение частоты тока требует установки дополнительного оборудования, изменение числа пар полюсов требует выполнения специальной обмотки в статоре и пересоединения ее в процессе эксплуатации, а включение дополнительных сопротивлений в цепь ротора выполнить невозможно.
Практически нерегулируем и синхронный двигатель, а в электродвигателях с фазным ротором регулирование частоты вращения достигается за счет ввода в цепь ротора дополнительных активных сопротивлений. Данный способ неэкономичен, так как расходуется электроэнергия на нагрев реостата и уменьшается мощность на валу двигателя.
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
 асинхронного и б) синхронного двигателя")
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
Рабочие характеристики синхронного двигателя

Скорость ротора n2, скольжение s, ток статора I1, потребляемая мощность, КПД двигателя, коэффициент мощности cos и момента от мощности(полезной) на валу.
При этом неизменными являются параметры сети, при которых происходит построение характеристик (U=const, f=const)
А)Скоростная характеристика
n2=f(P2)
При неизменной частоте, скорость при изменении нагрузки на валу в пределах допустимой остается постоянной.
Б)cosγ=f(P2)
При постоянном токе возбуждения увеличение нагрузки на валу вызывает уменьшение cosγ, что объясняется увеличением реактивного падения напряжения при возрастании потребляемого из сети тока
В) P1=f(P2) – потребляемая от полезной
П
τуст
отребляемая мощность P1 растет быстрее чем полезная мощность Р2 так как при увеличении нагрузки на валу сказывается увеличение электрических потерь двигателя, которые пропорциональны квадрату тока.Г) КПД от нагрузки: η=f(P2)
КПД с увеличением нагрузки резко увеличивается, достигая максимума тогда, когда независящие от нагрузки механические потери и потери в стали становятся равными, зависящим от нагрузки потерям в меди отмотках
Д) Момента на валу Mэм=f(P2)
Так как характеристики снимаются при условии постоянства частоты источника питания, следовательно угловая скорость w2 будет постоянной при значениях нагрузки в пределах допустимой. Так как момент прямо пропорционален полезной мощности и обратно пропорционален угловой скорости, то зависимость будет иметь вид прямой, выходящей из начала координат.
Е) Зависимость тока статора от мощности I1=f(P2)
При увеличении нагрузки при постоянном токе возбуждения происходит уменьшение cosφ
7) Асинхронный пуск синхронного двигателя.
Для осуществления этого пуска в полюсных наконечниках ротора вкладывается дополнительно короткозамкнутая обмотка, т.к во время пуска в обмотке возбуждения двигателя наводится большая ЭДС, то по соображениям безопасности короткозамкнутая обмотка замыкается рубильником LM на разрядное сопротивление. При включении трехфазной цепи в обмотку статора трехфазного двигателя возникает вращающееся магнитное поле, которое пересекает короткозамкнутую обмотку и индуктирует в ней токи. Эти токи взаимодействуя с вращающимся полем статора приводят ротор во вращение, при достижении ротором максимальной скорости вращения (асинхронной при номинальном скольжении – 95-97% от синхронной скорости) рубильник переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
14) Расчет мощности и выбор электродвигателя для электропривода
Выбор электродвигателя предполагает:
Выбор рода тока (переменный постоянный) и номинального напряжения исходя из экономических соображений с учетом того, что самыми простыми дешевыми и надежными являются асинхронные двигатели , а самыми дорогими и сложными – двигатели постоянного тока.
Выбор номинальной частоты вращения
Выбор конструктивного исполнения двигателя, при этом учитываются три фактора:
Защита от воздействия окружающей среды
Способ и обеспечение охлаждения
Способ монтажа.
Расчет мощностей электродвигателей для длительного режима работы
Основным условием является: Мн >= Мс
Для мощности: Рн > Рс
При постоянной нагрузке определяется мощность Рс или момент Мс механизма, приведенный к валу двигателя и по каталогу выбирается двигатель, имеющий номинальную мощность равную, либо большую, чем Рс. Для тяжелых условий пуска осуществляется проверка величины пускового момента двигателя так, чтобы он превышал момент сопротивления механизма. Мп=Мн*λ2
Мн =Рн/w1
λ2 — кратность пускового момента двигателя, выбираемая по каталогу
При длительной переменной нагрузке оопределение номинальной мощности двигателя производят по методу средних потерь либо по методу эквивалентных величин (моменту, току или мощности).
Расчет номинальной мощности двигателя по методу средних потерь
Метод основан на предположении, что при равенстве номинальных потерь двигателя ΔРн и средних потерь ΔРср, определяемых по нагрузочной диаграмме, температура двигателя не будет превышать допустимую. Τд=ΔPн/А= ΔPср/А
Метод расчета номинальной мощности двигателя по методу эквивалентных величин
Метод основан на понятии среднеквадратичного или эквивалентного тока ( мощности и момента). Переменные потери в двигателе пропорциональны квадрат тока нагрузки. Эквивалентным или неизменным по величине током называют ток, создающий в двигателе такие же потери, как и изменяющийся со временем фактический ток нагрузки
Определим величину эквивалентного тока:
Iэ=sqrt((I12t1+ I22t2+… In2tn)/(t1+t2…+tn))
По каталогу выбирается двигатель, ток которого больше либо равен эквивалентному току
Двигатель проверяют по перегрузочной способности (отношение критического момента к номинальному) λ, это значение не должно превышать допустимого значения в каталогах или эквивалентного момента
Мэкв=sqrt((М12t1+ М22t2+… Мn2tn)/(t1+t2…+tn))
Если мощность и вращающий момент двигателя пропорциональны величине тока, то для расчетов можно воспользоваться выражением для эквивалентной мощности
Рэкв=sqrt((Р12t1+ Р22t2+… Рn2tn)/(t1+t2…+tn))
Тема лекции 10 Механические характеристики электродвигателей план лекции
1.Естественные и искусственные механические характеристики электродвигателей
Жесткостьмеханических характеристик
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика асинхронного двигателя
Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической
характеристикой двигателя, независимо
от рода тока, называют зависимость
угловой скорости вала электродвигателя
ω (далее – двигателя) от электромагнитного
момента двигателя  ,
т.е зависимость ω (
,
т.е зависимость ω ( ).
).
Здесь
следует сделать важное замечание: в
соответствии с уравнением моментов, в
установившемся режиме  =
=
 ,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма –
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма –
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β – это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода.
β
= (М2– М1)/(
ω2 – ω1)=
Δ / Δω
/ Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β < 0, так как( ω2< ω1,
М1< М2) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристики электродвигателей.
Естественная механическая характеристика – это зависимость ω(), снятаяпри нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе – напряжение, при переменном токе – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
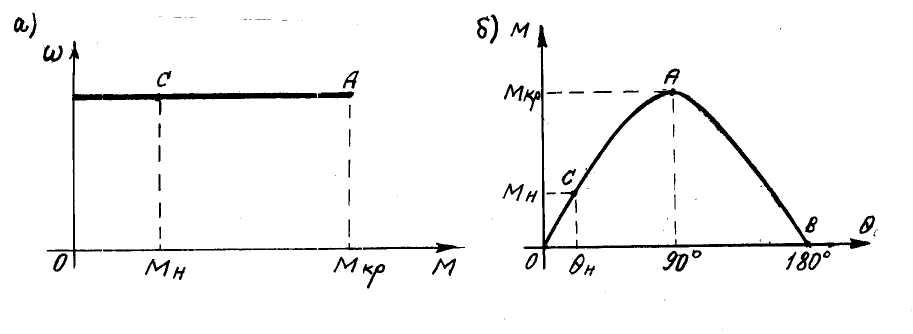
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора