
Схема управления шаговым двигателем и принцип работы
ШАГОВЫЕ ДВИГАТЕЛИ — ПРИНЦИП РАБОТЫ
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определённый угол, для совершения механической работы, приводящей в движение различные механизмы.
Принцип работы шаговых двигателей
Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора (состоящего из катушек (обмоток)) и ротора, на котором установлены постоянные магниты.
На картинке изображены 4 обмотки, расположенные на статоре под углом в 90 градусов относительно друг друга. Тип обмотки зависит от конкретного типа подключения шагового двигателя (как подключить шаговый двигатель).На примере выше обмотки двигателя не соединены, значит двигатель с такой схемой имеет шаг поворота в 90 градусов. Обмотки задействуются поочередно по часовой стрелке, а направление вращения вала двигателя обусловлено порядком задействования обмоток.
Шаговые двигатели — применение
Область применения шаговых двигателей довольно широка, они используются в промышленности, в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами (униполярные и биполярные) и двигатели с переменным магнитным сопротивлением (гибридные двигатели).%205V%20shagovoj%20dvigatel%20(f1)-512x512.jpg) С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости.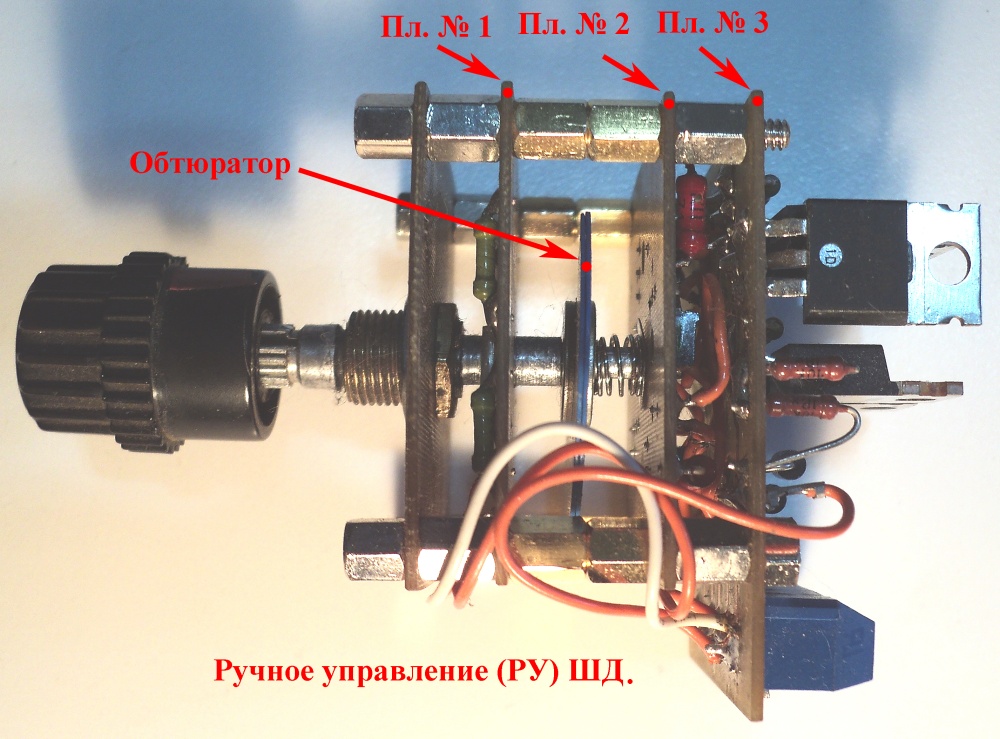 Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Управление биполярным шаговым двигателем требует наличия мостовой схемы. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется физическими возможностями шагового двигателя. При этом скорость регулируется путем изменения размера шага.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению вала двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора)
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.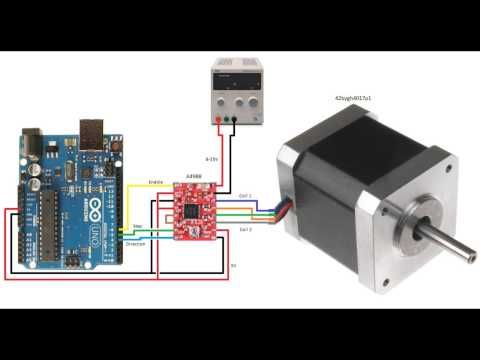
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол.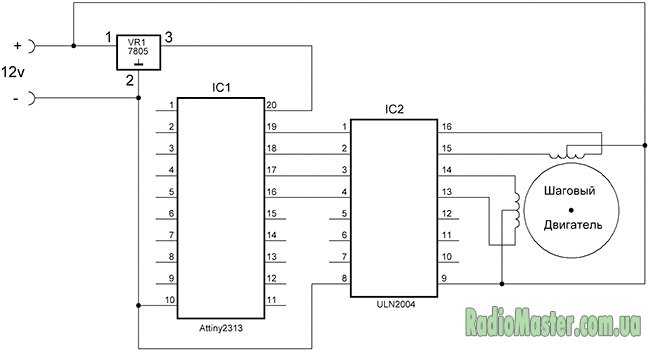 Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.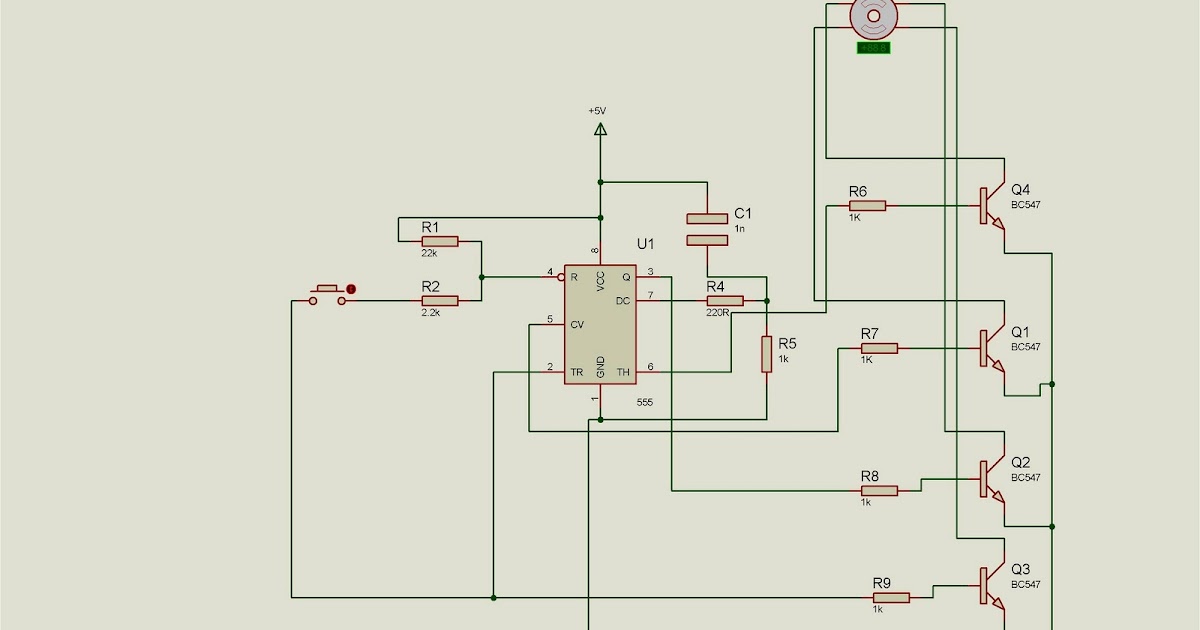
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.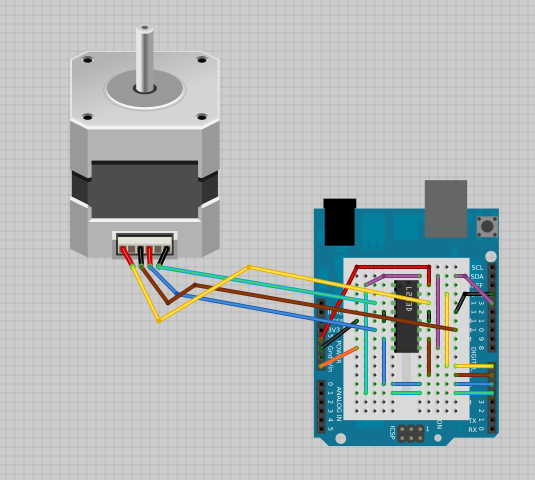
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны.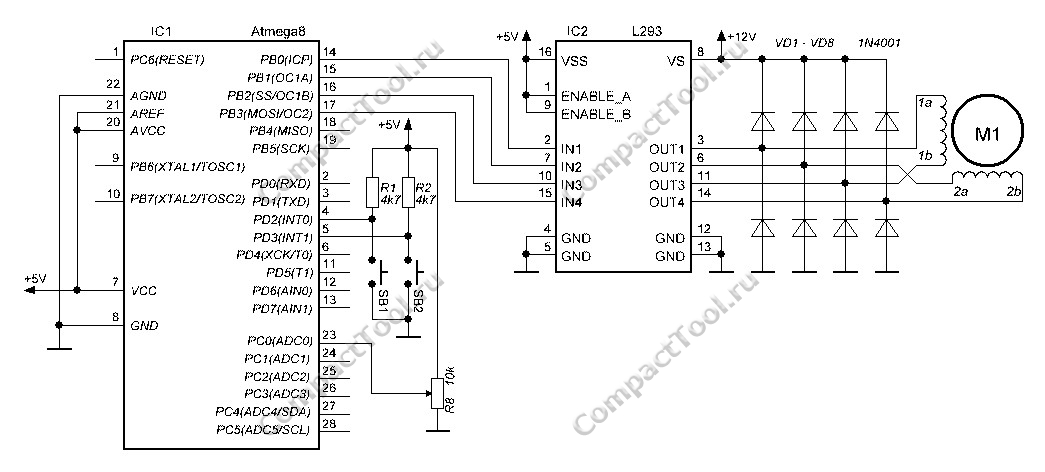 Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.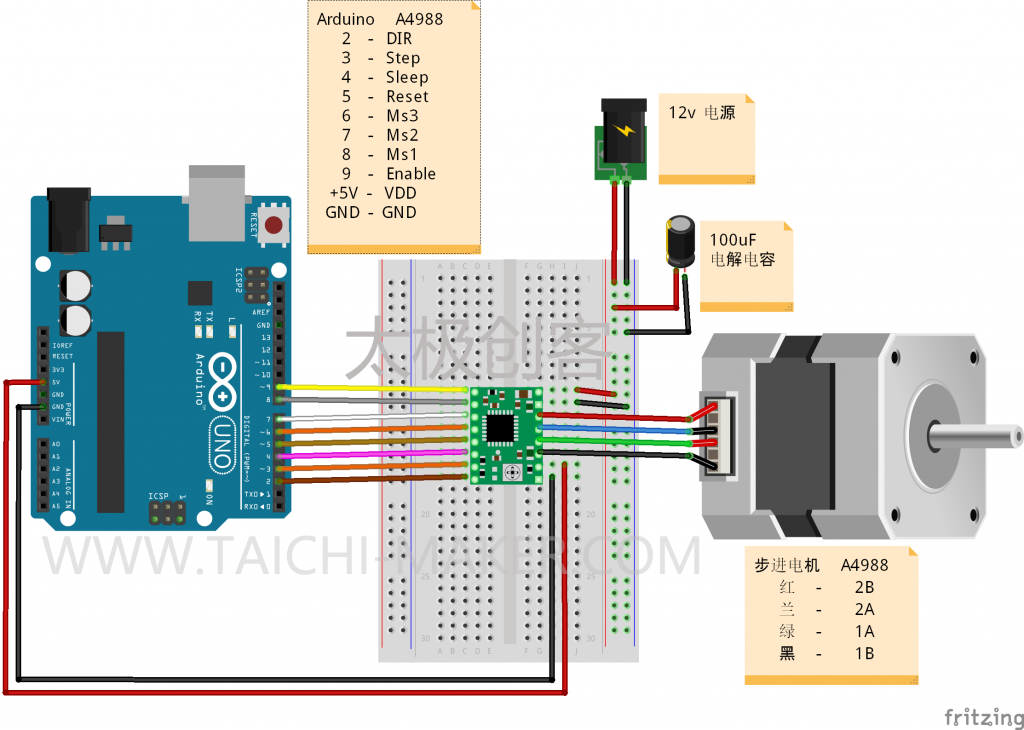
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Важными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемистость падает с увеличением нагрузки.
DARXTON
Как управлять шаговым двигателем с arduino
Управление Ардуино шаговым двигателем от принтера
В этом уроке вы узнаете, как управлять с помощью Ардуино шаговым двигателем, который был взят от старого принтера.
Шаг 1. Что такое шаговый двигатель?
Шаговый двигатель состоит из двух основных частей: ротора и статора.
Ротор является частью двигателя, который фактически вращается и обеспечивает работу. Статор представляет собой неподвижную часть двигателя, в котором размещается ротор. В шаговом двигателе ротор представляет собой постоянный магнит. Статор состоит из нескольких катушек, которые действуют как электромагниты, когда через них проходит электрический ток. Электромагнитная катушка заставит ротор выровняться вместе с ним при зарядке. Ротор приводится в движение путем чередования тока на катушках, протекающий через них.
Шаговые двигатели имеют ряд преимуществ. Они дешевы и просты в использовании. Когда ток не поступает в двигатель, ничего не происходит. Шаговые двигатели также могут вращаться без ограничений и изменять направление в зависимости от установленной полярности.
Шаг 2: Список деталей
Необходимые детали для проекта Ардуино шагового двигателя:
- Шаговый двигатель (этот двигатель был взят от старого принтера)
- Arduino
- Изолированный медный провод
- Проволочные резаки / стрипперы
- Регулятор тока
- транзистор
- драйвер двигателя H-Bridge 1A
- моторный шилд
- паяльник
- припой
- инструменты
- безопасные очки
Шаг 3: Присоединяем провода
Большинство шаговых двигателей имеют четыре провода, поэтому вам нужно будет обрезать четыре медных провода (обратите внимание, что цвет не коррелирует с чем-либо конкретным (обычно есть правило, что черный — это земля, но не сейчас).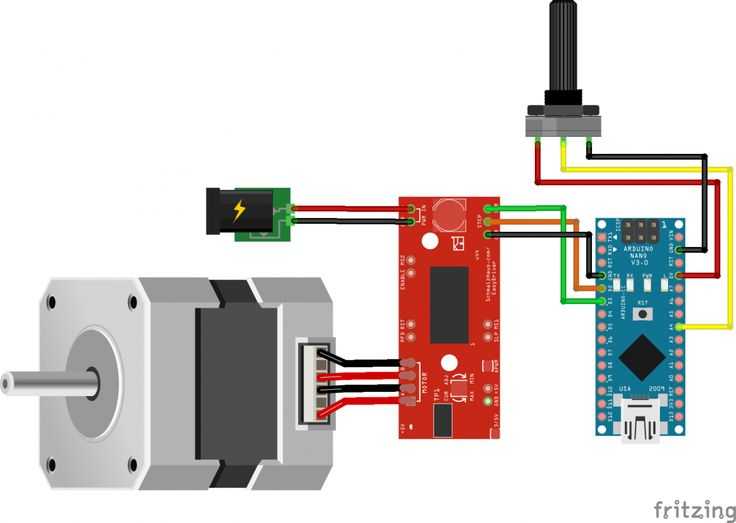 Различные цвета были использованы только для облегчения понимания. Эти выводы будут использоваться для управления, какая катушка в настоящее время активна в двигателе. Для этого проекта Ардуино шаговый двигатель был взят от старого принтера, поэтому пайка проводов была самым простым вариантом для этого проекта. В любом случае, вы можете безопасно установить соединение (пайка, штекер, клипы).
Различные цвета были использованы только для облегчения понимания. Эти выводы будут использоваться для управления, какая катушка в настоящее время активна в двигателе. Для этого проекта Ардуино шаговый двигатель был взят от старого принтера, поэтому пайка проводов была самым простым вариантом для этого проекта. В любом случае, вы можете безопасно установить соединение (пайка, штекер, клипы).
Шаг 4: Эскиз/скетч Arduino
Arduino уже имеет встроенную библиотеку для шаговых двигателей. Просто перейдите в меню:
Файл → Примеры → Шаговые → stepper_oneRevolution
File → Examples → Stepper → stepper_oneRevolution
Затем вам нужно изменить переменную stepsPerRevolution, чтобы она соответствовала вашему конкретному двигателю. После просмотра номера деталей двигателей в Интернете наш конкретный двигатель был рассчитан на 48 шагов для завершения одного оборота.
То, что на самом деле делает библиотека Stepper — чередует сигналы HIGH и LOW для каждой катушки, как показано в анимации выше.
Шаг 5: Что такое мост H-bridge?
H-Bridge — схема, состоящая из 4 переключателей, которые могут безопасно управлять двигателем постоянного тока или шаговым двигателем. Эти переключатели могут быть реле или (чаще всего) транзисторами. Транзистор представляет собой твердотельный переключатель, который можно закрыть, посылая небольшой ток (сигнал) на один из его контактов.
В отличие от одного транзистора, который позволяет вам контролировать скорость двигателя, H-мосты позволяют вам также контролировать направление вращения двигателя. Он делает это, открывая различные переключатели (транзисторы), чтобы ток тек в разных направлениях и, таким образом, изменяя полярность на двигателе.
H-Bridges может помочь вам предотвратить перегорания вашего Arduino моторами, которыми вы пользуетесь. Двигатели являются индукторами, а это означает, что они хранят электрическую энергию в магнитных полях. Когда ток больше не посылается двигателям, магнитная энергия возвращается в электрическую энергию и может повредить компоненты. H-Bridge помогает изолировать ваш Arduino лучше всего. Вы не должны подключать двигатель непосредственно к Arduino.
H-Bridge помогает изолировать ваш Arduino лучше всего. Вы не должны подключать двигатель непосредственно к Arduino.
Хотя H-Bridges можно легко сделать самому многие предпочитают покупать H-Bridge (например, чип L293NE / SN754410) из-за удобства. Это чип, который мы будем использовать в этом уроке. Физические номера контактов и их назначение ниже:
- Пин 1 (1, 2EN) → Мотор 1 Включен/Выключен (HIGH/LOW)
- Пин 2 (1A) → Мотор 1 логический выход 1
- Пин 3 (1Y) → Мотор 1 терминал 1
- Пин 4 → Земля
- Пин 5 → Земля
- Пин 6 (2Y) → Мотор 1 терминал 2
- Пин 7 (2A) → Мотор 1 логический выход 2
- Пин 8 (VCC2) → Питание для двигателей
- Пин 9 → Мотор 2 Включен/Выключен (HIGH/LOW)
- Пин 10 → Мотор 2 логический выход 1
- Пин 11 → Мотор 2 терминал 1
- Пин 12 → Земля
- Пин 13 → Земля
- Пин 14 → Мотор 2 терминал 2
- Пин 15 → Мотор 2 логический выход 2
- Пин 16 (VCC1) → Питание для H Bridge (5В)
Шаг 6: Схема соединения
Схема соединения нашего проекта Ардуино шагового двигателя ниже.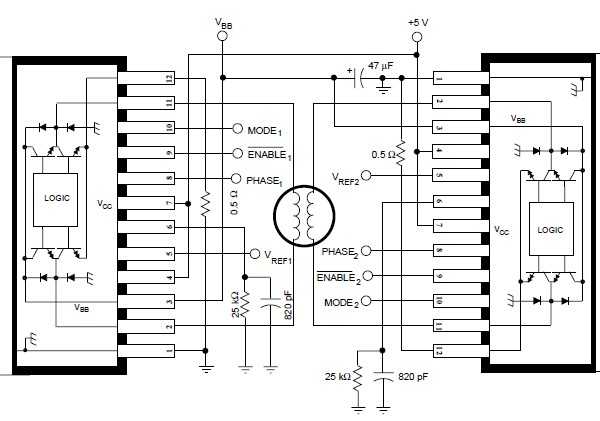
Для шагового двигателя Ардуино 4 вывода на H-Bridge должны подключаться к 4 выводам двигателя. Затем 4 логических вывода подключаются к Arduino (8, 9, 10 и 11). Как показано на диаграмме выше, для питания двигателей можно подключить внешний источник питания. Чип может обрабатывать внешний источник питания от 4,5 до 36 В (мы выбрали батарею 9В).
Шаг 7: Загрузка кода и тестирование
Загрузите свой код в Ардуино. Если вы запустите свой код и все сработает так, как ожидалось, это потрясающе! Если провода вставлены в неправильные контакты, двигатель просто вибрирует, а не полностью вращается. Играйте со скоростью и направлением двигателя, как сочтете нужным.
На этом всё, теперь у вас должен быть рабочий шаговый двигатель Arduino. То, что вы сделаете дальше, зависит только от вас.
Arduino и шаговый мотор
Шаговый мотор, в отличие от обычного мотора постоянного вращения, вращается пошагово и позволяет точно установить свой вал на заданный угол.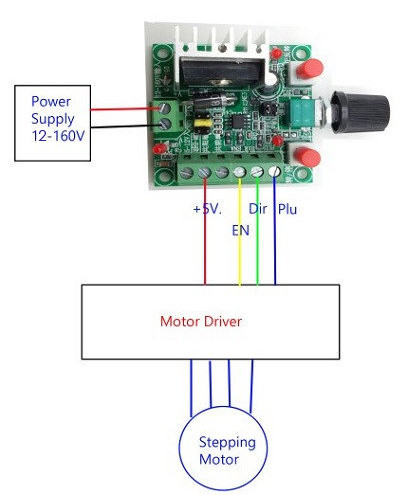 В отличие от сервопривода не имеет обратной связи по углу поворота (не знает, где сейчас находится вал), но зато может вращаться без ограничений. Шаговые моторы используются в ЧПУ станках и прочих устройствах с точным позиционированием частей механизма (2D/3D принтеры, манипуляторы, плоттеры…). В наборе GyverKIT идёт шаговый мотор 28BYJ-48 с драйвером ULN2003:
В отличие от сервопривода не имеет обратной связи по углу поворота (не знает, где сейчас находится вал), но зато может вращаться без ограничений. Шаговые моторы используются в ЧПУ станках и прочих устройствах с точным позиционированием частей механизма (2D/3D принтеры, манипуляторы, плоттеры…). В наборе GyverKIT идёт шаговый мотор 28BYJ-48 с драйвером ULN2003:
Данный мотор питается от 5V, имеет 32 шага на оборот (в полношаговом режиме) и встроенный редуктор с отношением 1/63.68395. Таким образом получается 2038 шагов на один оборот выходного вала.
Фазы мотора выведены следующим образом:
Подключение
Мотор управляется через драйвер, который по сути усиливает сигнал с пинов микроконтроллера (подключать моторы напрямую к пинам нельзя!). Драйвер подключается к питанию 5V, а 4 управляющих входа – к любым цифровым пинам МК. Фаза мотора потребляет около 100 мА, поэтому возможно питание драйвера напрямую от платы Arduino.
Библиотеки
Для шаговых моторов существует несколько библиотек, самые известные из них:
- Stepper – стандартная (идёт в комплекте с Arduino IDE) библиотека с минимальными возможностями – позволяет вращать мотор с плавным ускорением и торможением – моя библиотека с большим количеством возможностей и эффективными алгоритмами движения, читайте на странице библиотеки.
 Также есть расширенная документация
Также есть расширенная документация
 Также есть расширенная документация
Также есть расширенная документацияВ примерах на этом сайте мы будем использовать GyverStepper как самую удобную и функциональную. Библиотека идёт в архиве к набору GyverKIT, а свежую версию всегда можно установить/обновить из встроенного менеджера библиотек Arduino по названию GyverStepper. Краткая документация находится по ссылке выше, базовые примеры есть в самой библиотеке.
Примеры
Воспользуемся версией библиотеки GyverStepper2 (входит в набор GyverStepper). Создаём объект GStepper2 , в угловых скобках указываем тип драйвера STEPPER4WIRE , так как используем 4х проводной драйвер. Далее в круглых скобках – количество шагов на один оборот и пины в порядке (фаза А1, фаза А2, фаза В1, фаза В2). Из второй картинки (с описанием проводов мотора) видно, что первая фаза это провода 2 и 4, а вторая – 3 и 1. Драйвер не меняет порядок проводов, поэтому в программе нам нужно будет указать пины в порядке (1, 3, 2, 4), т.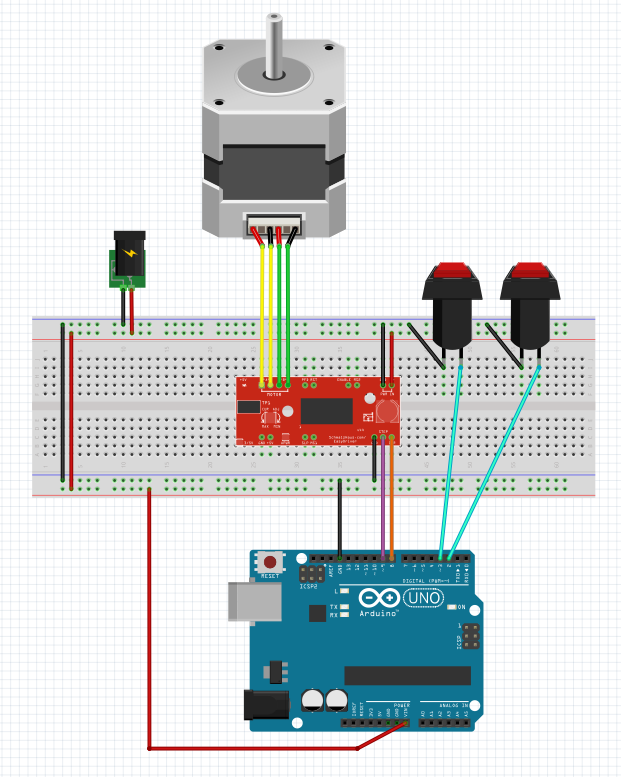 е. центральные нужно поменять местами. На схеме я подключил драйвер к пинам D2, D3, D4, D5, и в программе укажу их как (2, 4, 3, 5). Если прописать по порядку пинов – мотор будет работать некорректно!
е. центральные нужно поменять местами. На схеме я подключил драйвер к пинам D2, D3, D4, D5, и в программе укажу их как (2, 4, 3, 5). Если прописать по порядку пинов – мотор будет работать некорректно!
Данный пример просто крутит мотор на один пол оборота, затем возвращает обратно. Каждый раз ждём, когда мотор приедет на позицию.
Библиотека позволяет двигать мотор не блокируя выполнение кода, поэтому можно переписать следующим образом:
В этом примере также вывожу позицию мотора в порт, можно открыть плоттер и увидеть график:
Позиция здесь выводится в шагах, максимум как раз соответствует половине оборота
В библиотеке также есть поддержка движения с ускорением, добавим настройку setAcceleration()
Мотор перестанет дёргаться при смене направления движения, а график будет выглядеть вот так:
Подключение шагового двигателя к Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Схема подключения шагового двигателя к Arduino UNO
Проекты с использованием шавого двигателя
Проекты с использованием шавого двигателя
Регулятор скорости вращения для униполярного шагового двигателя на базе Arduino UNO
Пошаговая инструкция о том как своими руками собрать регулятор скорости вращения для униполярного шагового двигателя.
А именно о том как собрать электронную часть, как загрузить прошивку в управляющий микроконтроллер, как запустить все в работу и что для всего этого понадобится…
Открыть полностью
Регулятор скорости вращения для биполярного шагового двигателя на базе Arduino Nano
Самодельный димер на базе платы Arduino Nano и драйвера DRV8825
Два варианта управления биполярным шаговым двигателем, с кнопками для пуска и смены направления вращения.
Открыть полностью
Привод для жалюзи на базе Arduino UNO и шаговых двигателях 28BYJ-48 5V
Статья о том
Как собрать привод для жалюзи, на базе Arduino UNO и двух шаговых двигателях 28BYJ-48 5V.
К данной статье прилагаются два готовых скетча…
Открыть полностью
Управление двумя шаговыми двигателями с помощью джойстика на базе Arduino UNO.
Статья о том, из чего и как своими руками собрать привод на базе Arduino UNO, джойстика и двух униполярных шаговых двигателях 28BYJ-48 5V
Имеется схема и скетч, работающий без библиотек.
Открыть полностью
Автоматическая фокусировка на Arduino и Digispark с датчиком расстояния VL53L0X и драйвером DRW8825.
Статья, содержащая материалы для изучения и сборки двух вариантов привода, для автоматической фокусировки микроскопа, на Arduino UNO и Digispark
Как объединить две платы Arduino и Digispark, для совместной работы над общей задачей.
Как подключить биполярный шаговый двигатель к Arduino Uno и к Digispark…
Открыть полностью
Управление двумя униполярными шаговыми моторами по Bluetooth.
Статья о том, как своими руками собрать беспроводное управление, для двух униполярных шаговых моторов 28BYJ-48 5V.
В качестве пульта подойдет любой ANDROID телефон с наличием Bluetooth.
Открыть полностью
Лучший эмулятор Arduino UnoArduSim V2.6. Первая серия.
Набор из 9 простых скетчей, которые использовались в этой серии.
В этой серии рассмотрены принципы работы таких модулей как: светодиод, кнопка, потенциометр, Serial порт, программный Serial порт, 4 фазный шаговый двигатель, 2 фазный шаговый двигатель и DC Motor.
Открыть полностью
Регулятор скорости вращения для униполярного шагового двигателя на базе Didgispark
Простой и не дорогой, регулятор скорости вращения, для униполярного шагового двигателя.
В статье есть перечень материалов, скетч, схема для сборки, и видео инструкция.
Открыть полностью
Arduino управление шаговыми двигателями по Bluetooth при помощи Android смартфона
Статья о том как написать код для электрического привода, для слайдера под видеокамеру, с управлением по Bluetooth, на базе Arduino Nano, драйверов DRV8825 и Bluetooth модуля HC-05.
Открыть полностью
Управление биполярным шаговым двигателем при помощи инкрементального энкодера
Статья о том как подключить инкрементальный энкодер EC11 к Arduino, как управлять биполярным шаговым двигателем при помощи энкодера, как проверить инкрементный энкодер, как подключить драйвер шагового двигателя drw8825 к Arduino.
Открыть полностью
Плавный пуск и остановка биполярного шагового двигателя. Спец драйвер на Digispark Attiny85.
Статья о том, как организовать плавный пуск биполярного шагового двигателя, путём совмещения драйвера шагового двигателя с платой Didispark Attiny85, которая выступает в роли посредника между платой Arduino и драйвером шагового двигателя A4988 или DRW8825
Открыть полностью
ЧПУ станок для намотки трансформаторов на Arduino и Digispark.
Инструкция по управлению ЧПУ станком для намотки трансформаторов на Arduino.
А также материалы, для самостоятельной сборки ЧПУ станка, для намотки трансформаторов на Arduino.
Открыть полностью
ЧПУ станок для намотки трансформаторов с укладчиком провода, и автоматическим натяжением провода на Arduino и Digispark.
Материалы, для самостоятельной сборки ЧПУ станка для намотки трансформаторов на Arduino, с укладчиком провода, и с автоматическим натяжением провода.
А также инструкция, по управлению ЧПУ станком, для намотки трансформаторов на Arduino и Digispark.
Открыть полностью
Управление униполярными двигателями в практических решениях
В статье, опубликованной в [1], автором не были в полном объеме раскрыты вопросы, касающиеся схем управления униполярными шаговыми двигателями, и примененные им на практике варианты решений для приводов на основе шаговых двигателей этого типа. Поскольку тема шаговых двигателей вызвала повышенный интерес, а упомянутый вопрос не был освещен достаточно полно, то предлагается его более подробное рассмотрение. Тем более что по опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных.
Поскольку тема шаговых двигателей вызвала повышенный интерес, а упомянутый вопрос не был освещен достаточно полно, то предлагается его более подробное рассмотрение. Тем более что по опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных.
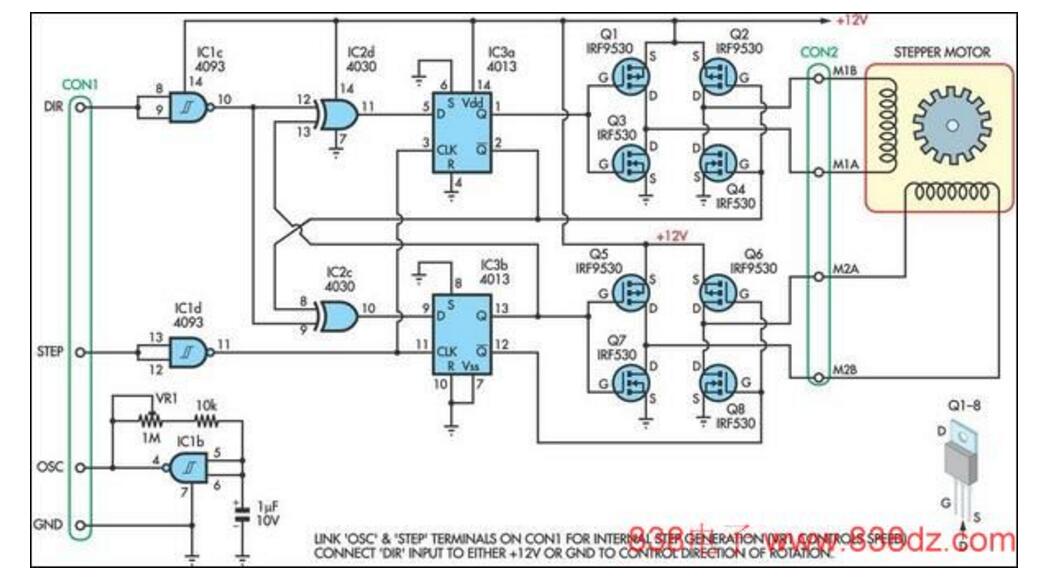
Основное преимущество униполярных шаговых двигателей заключается в простоте систем управления. Они не требуют сложных драйверов и дорогостоящих ИМС. Кроме того, и сами двигатели менее дороги, так как в основном данный тип включения обмоток характерен для двигателей на постоянных магнитах. Все это можно найти в статье автора, опубликованной ранее в [1]. Практическое решение для управления униполярным шаговым двигателем понадобилось при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов.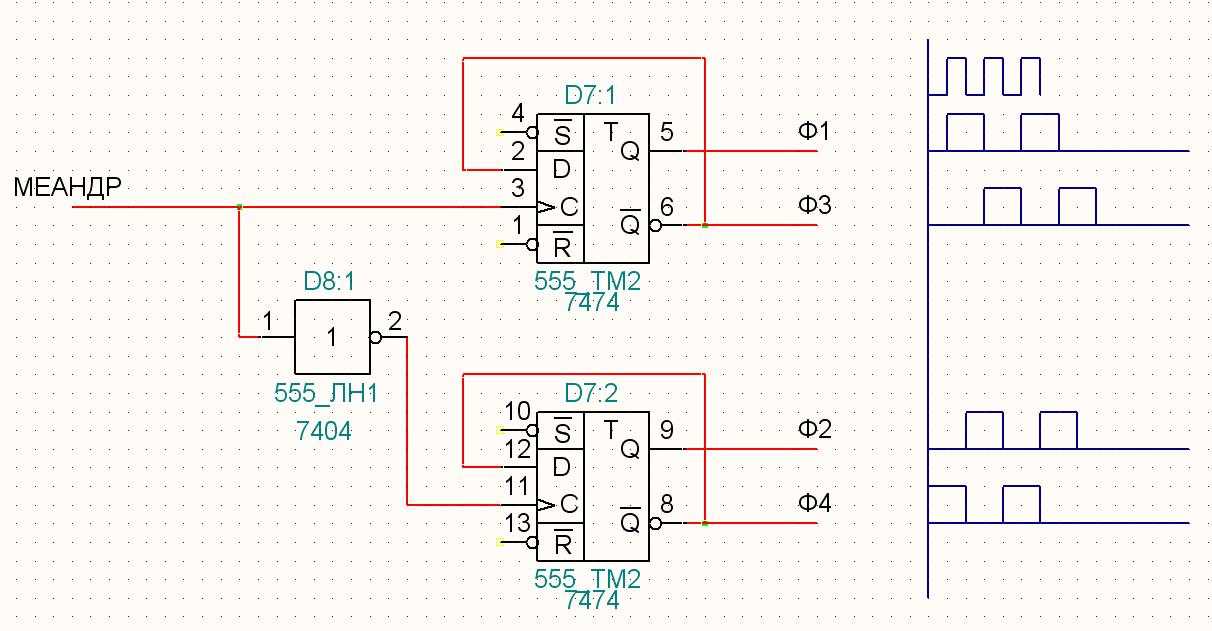 Здесь достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая пригодна для самых различных применений, приведен на рис. 1.
Здесь достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая пригодна для самых различных применений, приведен на рис. 1.
Рис. 1. Схема управления униполярного шагового двигателя с универсальным коммутатором
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «Шаг», необходимое направление вращения устанавливается через вход «Направление вращения». Оба сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис. 1 они не показаны). Временная диаграмма работы коммутатора схемы (рис. 1) приведена на рис. 2.
Рис. 2. Временная диаграмма универсального коммутатора с реверсом (маркеры показывают изменение очередности включения фаз): Q1 D2-2, Q2 D2-2 — верхние две трассы; Q1 D2-1, Q2 D2-1 — нижние две трассы
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис. 2). Если нет необходимости в реверсе, схема коммутатора может быть значительно упрощена (рис. 3), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая приведена на рис. 2 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
[1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис. 2). Если нет необходимости в реверсе, схема коммутатора может быть значительно упрощена (рис. 3), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая приведена на рис. 2 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
Рис. 3. Упрощенная схема коммутатора шагового двигателя (без реверса)
Момент вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использован импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4]. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток, это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте применена ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, то есть режим удержания, осуществляется подачи напряжения с частотой коммутации (вход «Шаг»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя приведен на рис. 4. Такая схема пригодна для запитки шаговых двигателей любого типа.
В авторском варианте применена ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, то есть режим удержания, осуществляется подачи напряжения с частотой коммутации (вход «Шаг»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя приведен на рис. 4. Такая схема пригодна для запитки шаговых двигателей любого типа.
Рис. 4. Схема запитки шагового двигателя с удержанием и выключением
Схема (рис. 4) обеспечивает подачу двух напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1.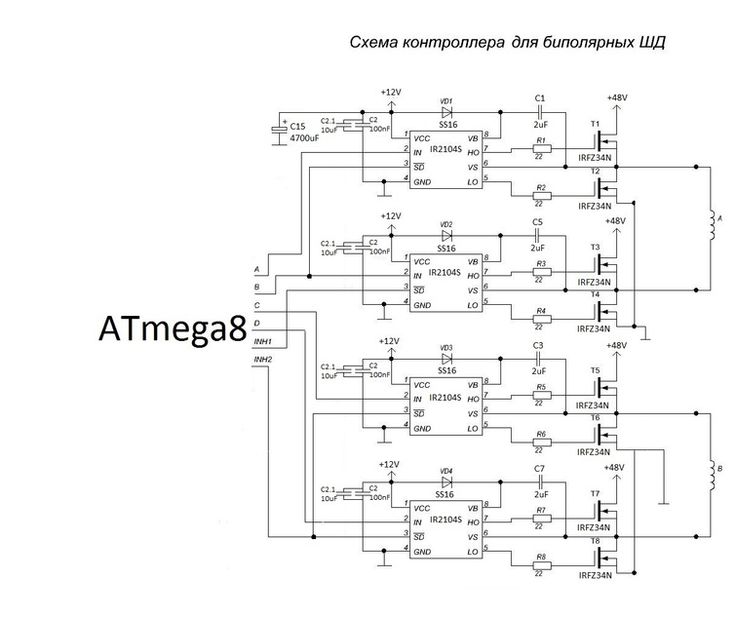 Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором 25:6 равен 19,8 Н·см, а момент вращения всего 6 Н·см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше — практически не отличается. Основная выгода этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 до 230 мА, то есть в два раза, а мощность — в четыре, с 5,52 до 1,38 Вт! Как говорится, почувствуйте разницу. Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема Х1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости.
Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором 25:6 равен 19,8 Н·см, а момент вращения всего 6 Н·см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше — практически не отличается. Основная выгода этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 до 230 мА, то есть в два раза, а мощность — в четыре, с 5,52 до 1,38 Вт! Как говорится, почувствуйте разницу. Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема Х1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости.
Примечание. В этом варианте применение резисторов подтяжки недопустимо! В качестве дросселя автором использовалась катушка SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16-18 В. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16-18 В. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f = (300-500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f×7,5/360=(6,25–10,42) об/с,
где 7,5 — это угол поворота ротора двигателя на один шаг управления, он-то и задан конструктивно. Дальнейшее понижение частоты вращения определяется редуктором.
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого, чтобы компенсировать уменьшение момента вращения, неизбежного с ростом частоты, применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions:») задан для двух условий, а именно: для условия, обозначенного как L/R, и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 вместо 300 Гц. Что это за условия? Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для него не требуется подача напряжения как такового, а необходимо обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions:») задан для двух условий, а именно: для условия, обозначенного как L/R, и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 вместо 300 Гц. Что это за условия? Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для него не требуется подача напряжения как такового, а необходимо обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения Imax = Vdc/R:
I(t)=Imax(1–e—t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где L — это индуктивность обмотки двигателя; R — общее сопротивление в цепи обмотки. Это сопротивление может быть как собственно активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из приведенной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорциональна сопротивлению. Чем быстрее ток достигнет своего максимального уровня:
Imax=Vdc/RL,
где Vdc — это номинальное напряжение запитки обмотки; RL — активное сопротивление в цепи обмотки, — тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель — установить (быстро, насколько возможно) ток в обмотке на уровне Vdc/RL.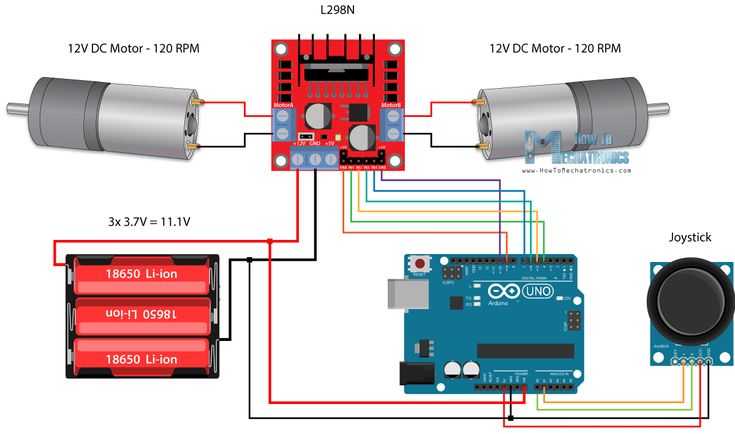
Просто увеличить напряжение на двигателе выше номинального крайне нежелательно, даже если вы уверены в том, что при выбранной скорости вращения ротора ток в обмотках не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vdc лишь на некоторое время, в несколько раз меньшее длительности импульса управления, но это потребует дополнительных ключей, а потому такой способ используется очень редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличением напряжения питания Vdc. Это и ускорит накопление тока в индуктивности, и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот именно на этот режим и «намекает» спецификация [2]. В классической теории применим режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R.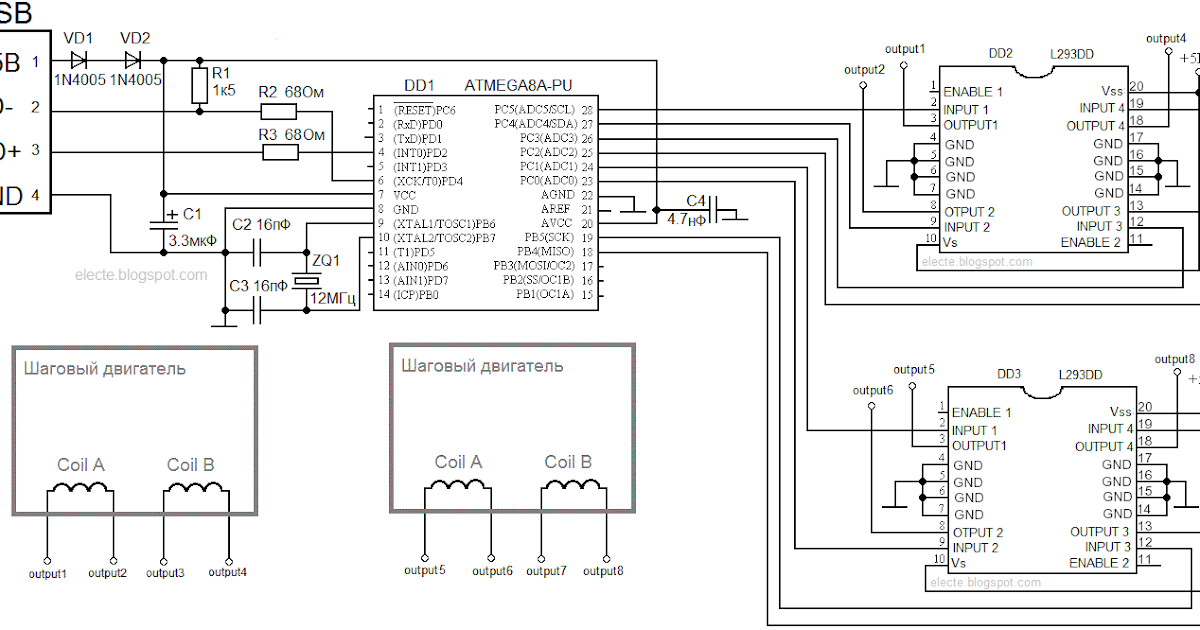 Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4 Vdc на добавочных резисторах при малых скоростях вращения, и особенно при остановке двигателя, будет рассеиваться мощность до:
Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4 Vdc на добавочных резисторах при малых скоростях вращения, и особенно при остановке двигателя, будет рассеиваться мощность до:
PR=(3Vcd)2/3RL.
Фактически, с учетом допустимого коэффициента нагрузки, придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения чрезвычайно низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока. Применение данного метода для биполярных шаговых двигателей было рассмотрено в [1], здесь для управления биполярным двигателем использовался драйвер с встроенной функцией нарезки, так называемый чоппинг (от англ.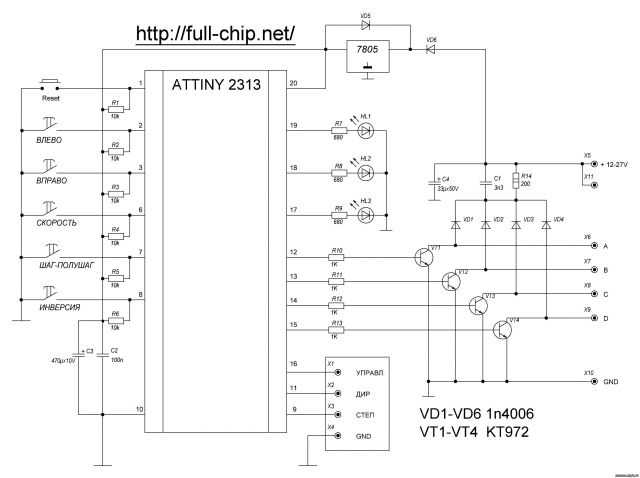 chopping — «нарезка»). В чем его суть? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда для индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД гораздо выше. Сравнение методов управления током в обмотках двигателя приведено на рис. 5.
chopping — «нарезка»). В чем его суть? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда для индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД гораздо выше. Сравнение методов управления током в обмотках двигателя приведено на рис. 5.
Рис. 5. Форма тока в обмотках шагового двигателя при различных вариантах питания [7]
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис. 1). Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение — предусматривать необходимость заряда/разряда емкости затвора.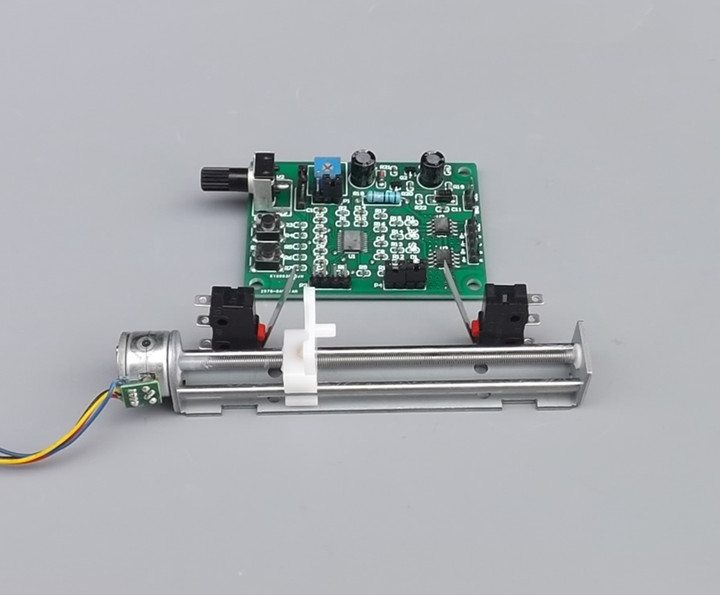 В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае следует выбрать соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае следует выбрать соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, оптимальным вариантом для управления коммутацией обмоток является использование подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше.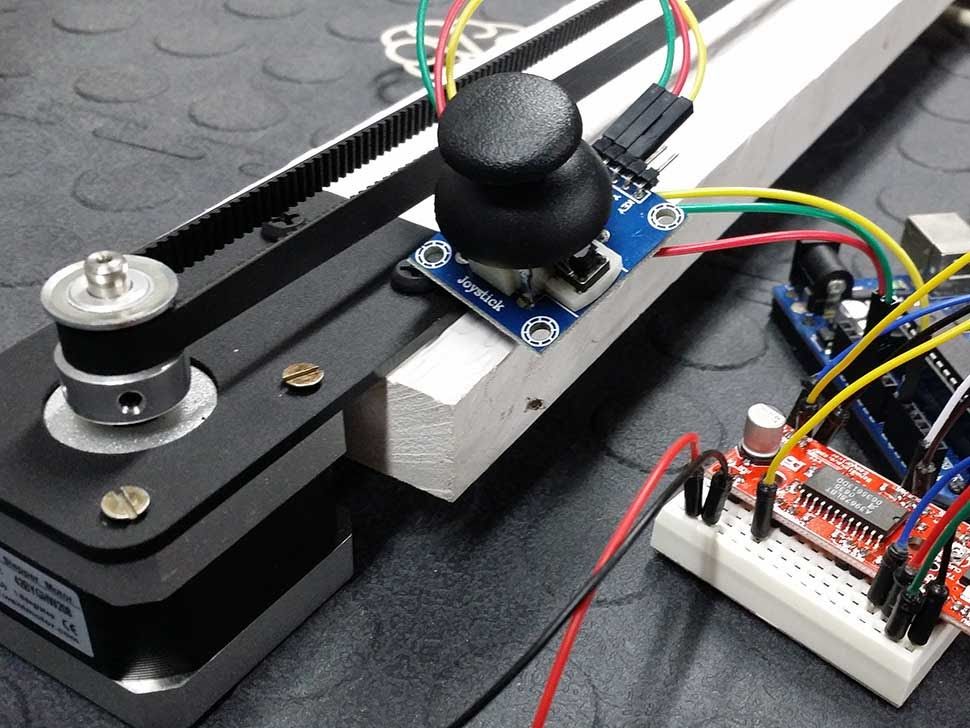 В авторском варианте были применены транзисторы IRLML2803 с Rdc(on) = 0,25 Ом, допустимой мощностью рассеивания 540 мВ и постоянным током стока 0,93 А при температуре +70 °C. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
В авторском варианте были применены транзисторы IRLML2803 с Rdc(on) = 0,25 Ом, допустимой мощностью рассеивания 540 мВ и постоянным током стока 0,93 А при температуре +70 °C. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT< Rdc(on)I2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание: когда речь идет о частоте вращения ротора шагового двигателя, то имеется в виду именно то, о чем говорилось, — вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°).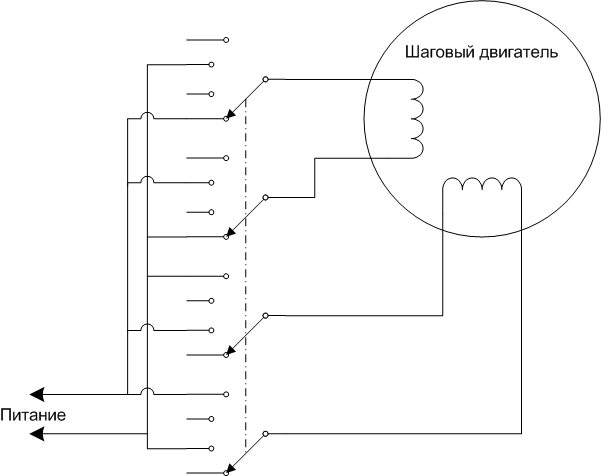 Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все нужные параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все нужные параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
- Рентюк В. Шаговые двигатели и особенности их применения // Компоненты и технологии. 2013. № 10.
- Geared stepper motor P542-M48 series, Mclennan Servo Supplies Ltd. www.mclennan.co.uk
- Rentyuk V. Control stepper motors in both directions // EDN March 18. 2010.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center. Электрик. 2013. № 10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В. П., Маскимчук А. А., Ремнев А. М., Смердов В. Ю. Энциклопедия устройств на полевых транзисторах. М., СОЛОН-Р, 2002.
- Емельянов А. В., Шилин А. Н. Шаговые двигатели: учебное пособие. ВолгГТУ, Волгоград, 2005.

Одноканальное управление шаговым двигателем | Статья в журнале «Молодой ученый»
Библиографическое описание:Воробьев, Д. В. Одноканальное управление шаговым двигателем / Д. В. Воробьев, В. А. Трусов, И. И. Кочегаров, Н. В. Горячев. — Текст : непосредственный // Молодой ученый. — 2015. — № 3 (83). — С. 110-113. — URL: https://moluch.ru/archive/83/15245/ (дата обращения: 02.10.2022).
При конструировании механических узлов РЭС перед конструктором встает задача позиционирования различных узлов: перемещение считывающих головок, поворот антенн на определенный угол, перемещение узла экструдера 3D принтера в пространстве и так далее. Для выполнения этой задачи идеально подходят шаговые двигатели.
Шаговые двигатели имеют ряд преимуществ перед обычными двигателями постоянного тока:
— Угол поворота ротора определяется числом импульсов, которые поданы на двигатель.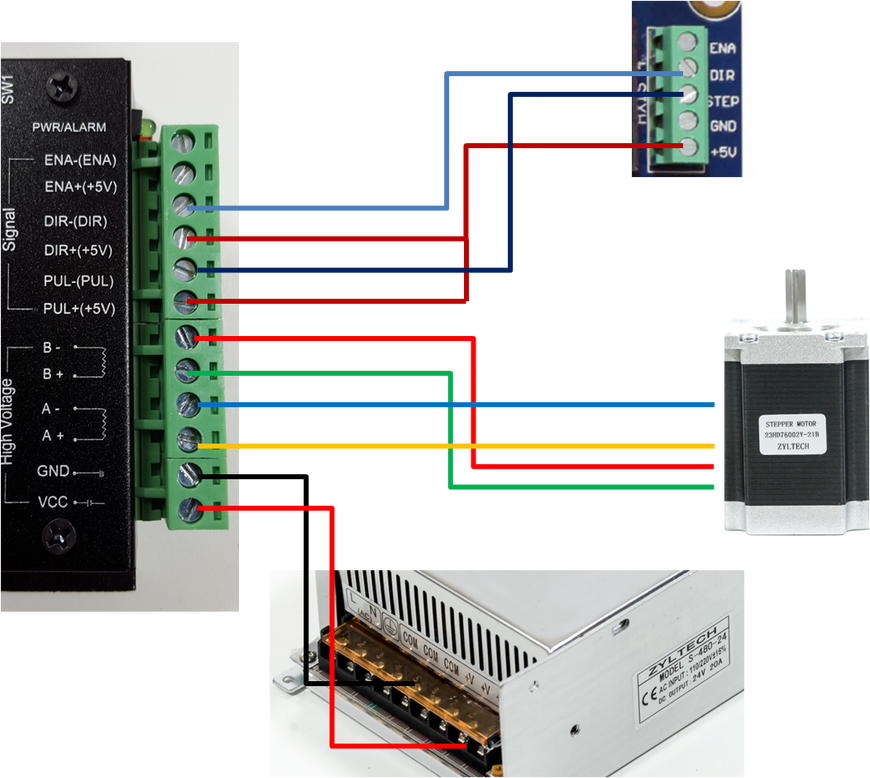
— Прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3–5 % от величины шага. Эта ошибка не накапливается от шага к шагу.
— Возможность быстрого старта/остановки/реверсирования.
— Высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников.
— Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора.
— Может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Итак, перед нами стоит задача организовать одноканальное управление шаговым двигателем.
Выбор двигателя
Шаговые двигатели в зависимости от конфигурации обмоток подразделяются на биполярные, униполярные и четырехобмоточные. Биполярный двигатель имеет одну обмотку в каждой фазе, изменение магнитного поля в которых происходит за счет изменения направления тока.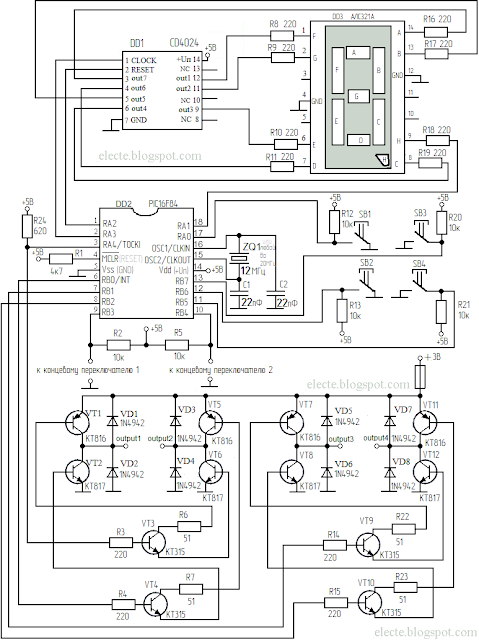 Это делает управляющую схему достаточно сложной. В униполярных двигателях так же по одной обмотке в каждой фазе, но от середины обмотки сделан отвод, что позволяет управлять двигателем при помощи последовательной коммутации полуобмоток. Четырехобмоточные шаговые двигатели имеют по две обмотки в каждой фазе и управляются последовательной коммутацией обмоток. Схема устройства шаговых двигателей показана на рисунке 1.
Это делает управляющую схему достаточно сложной. В униполярных двигателях так же по одной обмотке в каждой фазе, но от середины обмотки сделан отвод, что позволяет управлять двигателем при помощи последовательной коммутации полуобмоток. Четырехобмоточные шаговые двигатели имеют по две обмотки в каждой фазе и управляются последовательной коммутацией обмоток. Схема устройства шаговых двигателей показана на рисунке 1.
Рис. 1. Устройство шаговых двигателей: биполярный (А), униполярный (Б) и четырехобмоточные (В) шаговые двигатели
Выберем для решения нашей задачи униполярный шаговый двигатель, ввиду простоты его управления.
Управление шаговым двигателем
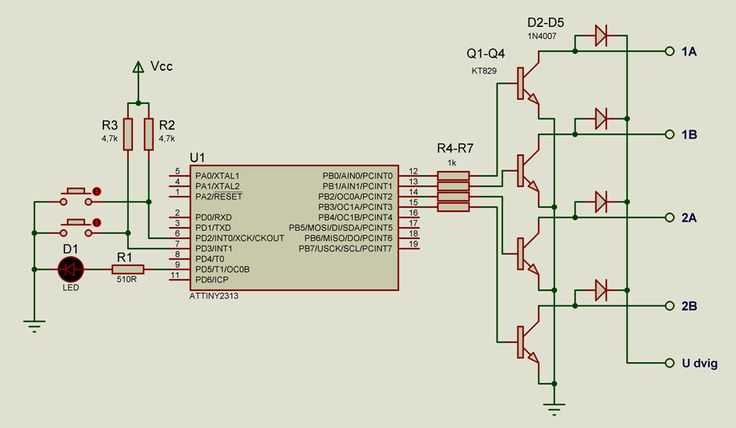
Задача управления униполярным шаговым двигателем состоит в формировании последовательности импульсов, коммутирующих обмотки через транзисторные ключи. Импульсы формируются при помощи унифицированного модуля Arduino в соответствии с данными, подаваемыми на него с ЭВМ или других блоков управления системой, в которой установлен шаговый двигатель. Схема включения шагового двигателя указана на рисунке 2.
Схема включения шагового двигателя указана на рисунке 2.
Рис. 2. Схема включения шагового двигателя
В данной схеме диоды VD1-VD4 используются для ускорения времени спада тока обмоток шагового двигателя. Питание подается на отводы обмоток, так как ток, получаемый на выходе модуля Arduino, сравнительно мал.
Шаговый двигатель может работать в шаговом или полушаговом режиме. В шаговом режиме за одну коммутацию двигатель поворачивается на один шаг, в полушаговом — на половину шага соответственно. Последовательности импульсов, формируемых модулем Arduino, указаны в таблице.
Таблица 1
Последовательность управляющих импульсов для шагового (а) и полушагового (б) режимов
Для поворота двигателя в противоположную сторону управляющие импульсы подаются в обратной последовательности. Скорость поворота двигателя изменяется за счет изменения частоты управляющих импульсов.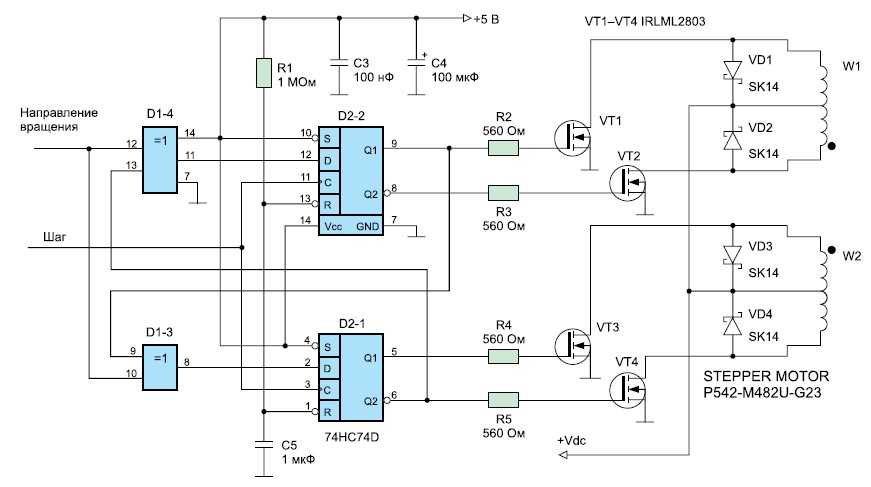
Заключение
Несмотря на все свои положительные стороны, шаговые двигатели имеют ряд недостатков:
— шаговым двигателем присуще явление резонанса;
— возможна потеря контроля положения ввиду работы без обратной связи;
— потребление энергии не уменьшается даже без нагрузки;
— затруднена работа на высоких скоростях;
— невысокая удельная мощность;
— относительно сложная схема управления.
Приведенные выше недостатки следует учитывать при применении шаговых двигателей в различных системах управления.
Литература:
1. Андреев П. Г. Анализ программных пакетов моделирования влияния электромагнитных воздействий на изделия радиоэлектронных средств / П. Г. Андреев, С. А. Бростилов, Т. Ю. Бростилова, Н. В. Горячев, Г. П. Разживина, В. А. Трусов // Информационно-вычислительные технологии и математическое моделирование в решении задач строительства, техники, управления и образования: сб. статей. Междунар. научн.чтения– Пенза: ПГУАС, 2014. — C 126–130.
статей. Междунар. научн.чтения– Пенза: ПГУАС, 2014. — C 126–130.
2. Бростилов С. А. Метрологический анализ измерительной подсистемы информационно-измерительной системы для исследования средств воздушного охлаждения / С.А Бростилов, Н. В. Горячев, Т. Ю. Бростилова // Труды международного симпозиума Надежность и качество. 2014. Т. 2. С. 127–129.
3. Гусев А. М. Структурно-разностный анализ элемента, включающего вершинную, негативную, позитивную и позитивно-контурную пары направлений / А. М. Гусев, Э. В. Лапшин, Г. Г. Беликов, И. Ю. Наумова, Н. В. Горячев, А. К. Гришко // Международный студенческий научный вестник. 2014. № 3. С. 7.
4. Шуваев П. В. Формирование структуры сложных многослойных печатных плат / П. В. Шуваев, В. А. Трусов, В. Я. Баннов, И. И. Кочегаров, В. Ф. Селиванов, Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 364–373.
5. Горячев Н. В. Подсистема расчета средств охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н.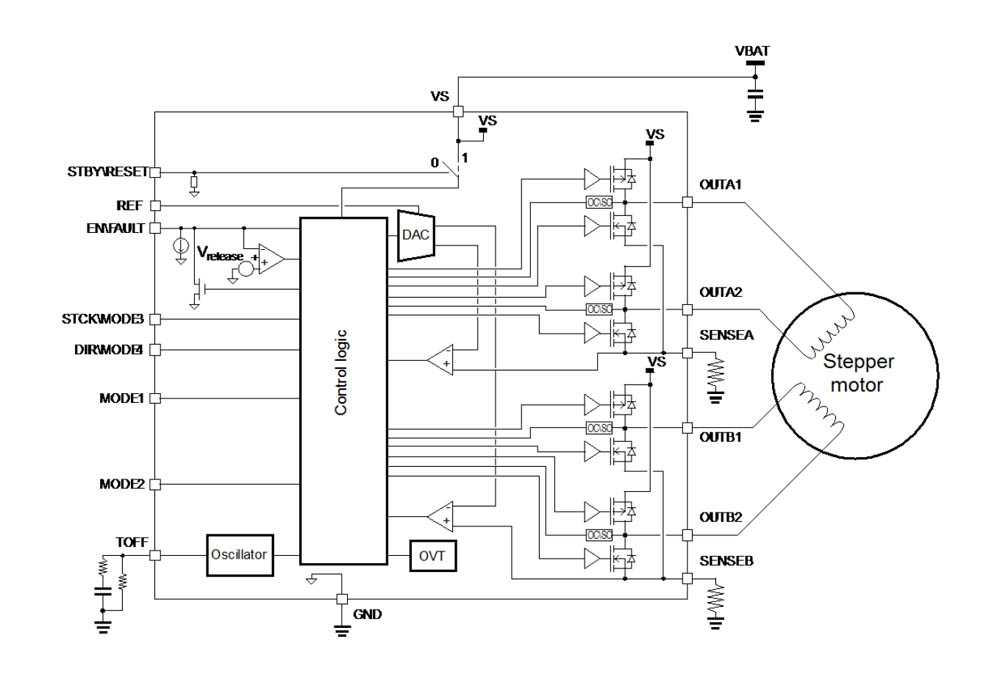 В. Горячев, И. Д. Граб, А. А. Рыжов // Известия высших учебных заведений. Поволжский регион. Технические науки. 2010. № 4. С. 25–30.
В. Горячев, И. Д. Граб, А. А. Рыжов // Известия высших учебных заведений. Поволжский регион. Технические науки. 2010. № 4. С. 25–30.
6. Сивагина Ю. А. Разработка ретранслятора радиосигналов и его компьютерной модели / Ю. А. Сивагина, Н. В. Горячев, Н. К. Юрков, И. Д. Граб, В. Я. Баннов // Современные информационные технологии. 2013. № 17. С. 207–213.
7. Горячев Н. В. Концептуальная схема разработки систем охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, Н. К. Юрков // Проектирование и технология электронных средств. 2009. № 2. С. 66–70.
8. Трифоненко И. М. Обзор систем сквозного проектирования печатных плат радиоэлектронных средств / И. М. Трифоненко, Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2012. Т. 1. С. 396–399.
9. Горячев Н. В. Тепловая модель учебной системы охлаждения / Н. В. Горячев, Д. Л. Петрянин // Прикаспийский журнал: управление и высокие технологии. 2014. № 2. С. 197–209.
2014. № 2. С. 197–209.
10. Grab I. D., Sivagina U. A., Goryachev N. V., Yurkov N. K. Research methods of cooling systems. Innovative Information Technologies: Materials of the International scientific — рractical conference. Part 2. –M.: HSE, 2014, 443–446 pp.
11. Горячев Н. В. Уточнение тепловой модели сменного блока исследуемого объекта / Н. В. Горячев, И. Д. Граб, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 169–171.
12. Горячев Н. В. Методика формирования контура печатной платы в САПР электроники с помощью сторонней механической САПР / Н. В. Горячев, Н. К. Юрков // Цифровые модели в проектировании и производстве РЭС. 2010. № 15. С. 127.
13. Горячев Н. В. Средства и методики анализа и автоматизированного выбора систем охлаждения радиоэлектронной аппаратуры / Н. В. Горячев, А. Ю. Меркульев, Н. К. Юрков // Молодой ученый. 2013. № 12 (59). С. 112–115.
14. Горячев Н. В. Концептуальная структура СППР в области выбора теплоотвода электрорадиоэлемента / Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2012. Т. 2. С. 241–241.
В. Горячев // Труды международного симпозиума Надежность и качество. 2012. Т. 2. С. 241–241.
15. Бростилов С. А. Волоконно-оптические кабели для волоконно-оптических датчиков / С. А. Бростилов, Т. И. Мурашкина, Т. Ю. Бростилова, А. Ю. Удалов, А. В. Архипов // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 108–111.
16. Горячев Н. В. Комплексы и системы теплофизического проектирования электронной аппаратуры / Н. В. Горячев, Ю. А. Сивагина, Е. А. Сидорова // Цифровые модели в проектировании и производстве РЭС. 2011. № 16. С. 178.
17. Подложенов К. А. Разработка энергосберегающих технологий для теплиц / К. А. Подложёнов, Н. В. Горячев, Н. К. Юрков // Современные информационные технологии. 2012. № 15. С. 193–194.
18. Горячев Н. В. Проектирование топологии односторонних печатных плат, содержащих проволочные или интегральные перемычки / Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 122–124.
С. 122–124.
19. Петрянин Д. Л. Анализ систем защиты информации в базах данных / Д. Л. Петрянин, Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 115–122.
20. Горячев Н. В. К вопросу реализации метода автоматизированного выбора системы охлаждения / Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Алгоритмы, методы и системы обработки данных. 2013. № 3 (25). С. 16–20.
21. Меркульев А. Ю. Системы охлаждения полупроводниковых электрорадиоизделий / А. Ю. Меркульев, Н. В. Горячев, Н. К. Юрков // Молодой ученый. — 2013. — № 11. — С. 143–145.
22. Горячев Н. В. Исследование и разработка средств и методик анализа и автоматизированного выбора систем охлаждения радиоэлектронной аппаратуры / Горячев Н. В., Танатов М. К., Юрков Н. К. // Надежность и качество сложных систем. 2013. № 3. С. 70–75.
Основные термины (генерируются автоматически): шаговый двигатель, двигатель, схема включения, униполярный шаговый двигатель.
Как управлять шаговыми двигателями для точных движений роботов
Во многих технологиях, которые движут современным миром, шаговые двигатели активно работают. Эти относительно простые, но высокоэффективные двигатели являются отличным выбором для многих различных применений, включая производственные приложения, в которых используются роботизированные компоненты.
Шаговые двигатели, однако, требуют систем управления, которые могут обеспечить степень точного оперативного управления, которая создает точные и точные движения роботов. И когда инженер проектирует эти системы управления, ему необходимо уделять особое внимание конструкции контроллера и электрической коробки, используемой для его размещения.
В сегодняшнем выпуске блога Polycase TechTalk мы углубимся в основы шагового двигателя и его применения. Затем мы поговорим о том, как управлять шаговыми двигателями для инженеров-механиков и электриков, проектирующих и определяющих системы управления двигателями.
Частично разобранный шаговый двигатель. Обратите внимание на магнитные катушки, окружающие зубчатый ротор.
Что такое шаговый двигатель?Шаговый двигатель — это распространенный тип бесщеточного двигателя с питанием от постоянного тока. Чтобы понять, как работают шаговые двигатели и почему мы их используем, вы должны сначала понять несколько вещей о том, как работают электрические двигатели.
Основное назначение электродвигателя — преобразование электрической энергии в механическую. Для этого в электродвигателе используются различные типы магнитов, которые взаимодействуют друг с другом и заставляют физические компоненты двигателя двигаться. Движение компонентов вращает вал двигателя, который передает механическую энергию от двигателя для питания других частей системы.
Существует два широко используемых типа электродвигателей: коллекторные и бесщеточные. В каждом из них используется свой метод преобразования электрической энергии в механическую:
- Коллекторный двигатель использует электрические контакты, называемые щетками, которые передают ток на якорь, намотанный металлическими катушками. Два постоянных магнита статора, один положительный и один отрицательный, окружают якорь и заставляют якорь, находящийся под напряжением, вращаться. Когда якорь вращается, его кинетическая энергия вращает вал двигателя.
- В бесщеточном двигателе используется несколько электромагнитов статора, расположенных по кольцу вокруг намагниченного ротора. Электромагниты можно активировать и деактивировать последовательно, чтобы управлять вращением ротора и точно совмещать его с каждым магнитом. Здесь вращение ротора создает кинетическую энергию, вращающую вал двигателя.
 Два постоянных магнита статора, один положительный и один отрицательный, окружают якорь и заставляют якорь, находящийся под напряжением, вращаться. Когда якорь вращается, его кинетическая энергия вращает вал двигателя.
Два постоянных магнита статора, один положительный и один отрицательный, окружают якорь и заставляют якорь, находящийся под напряжением, вращаться. Когда якорь вращается, его кинетическая энергия вращает вал двигателя.Коллекторные двигатели все еще используются в различных устройствах, например, в бытовой технике. Однако бесщеточные двигатели вытеснили щеточные во многих других областях, в том числе во многих цифровых технологиях, которые управляют нашим миром.
Таким образом, важно понимать, как управлять шаговыми двигателями и как создавать системы управления, которые управляют ими безопасно и эффективно. Прежде чем мы углубимся в то, как они работают, давайте лучше поймем, как используются шаговые двигатели, рассмотрев преимущества, которые могут предложить шаговые двигатели, и приложения, в которых они обычно используются.
Прежде чем мы углубимся в то, как они работают, давайте лучше поймем, как используются шаговые двигатели, рассмотрев преимущества, которые могут предложить шаговые двигатели, и приложения, в которых они обычно используются.
Пример базовой конструкции шагового двигателя. Каждая из катушек активируется последовательно, чтобы обеспечить постоянное и предсказуемое движение ротора.
Преимущества шаговых двигателейИтак, почему шаговые двигатели часто выбирают для робототехники? Вот некоторые из основных преимуществ шаговых двигателей, благодаря которым они идеально подходят для робототехники:
- Чрезвычайно точное управление движением и позиционированием двигателя
- Намного меньше требований к техническому обслуживанию, чем у коллекторных двигателей
- Высокоэффективная и надежная работа при номинальных скоростях и нагрузках
- Значительно меньшая занимаемая площадь, чем у большинства коллекторных двигателей
- Вырабатывает гораздо меньше тепла и электрического шума, чем коллекторные двигатели питают только одну сторону кольца катушки статора за раз, а также относительно недороги, что делает их популярными как среди любителей электроники, так и среди профессионалов. Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную катушке статора, которая находится под напряжением, сложнее и дороже. Однако их более плавная и точная работа делает их более подходящими для промышленного применения.
Шаговый двигатель подходит не для всех задач. Если ваш проект требует непрерывного вращения двигателя на очень высоких скоростях (обычно более 2000 об/мин), многочисленные полюса в шаговом приводе могут вызвать такие условия, как потери на вихревые токи, которые снижают эффективность двигателя. Кроме того, износ ротора на таких высоких скоростях может сократить срок его службы.
Закажите корпус ЧПУ для вашего проекта обработки с ЧПУ
Робототехника для шаговых двигателейШаговые двигатели используются в самых разных областях, особенно в робототехнике. Поскольку шаговые двигатели обеспечивают точное позиционирование и надежные повторяющиеся движения, они идеально подходят для приложений, требующих длинных последовательностей быстрых и точных движений.
Распространенные применения шаговых двигателей в робототехнике включают:- CNC-обработка
- 3D- и 2D-печать
- Текстильное производство
- Медицинские устройства визуализации
- Системы хранения данных на жестких дисках
Каждое из этих приложений требует точного контроля над роторами, лазерами, печатающими головками, стилусами и другими автоматизированными роботизированными компонентами. Шаговые двигатели обеспечивают точное управление и надежность, необходимые инженерам при проектировании робототехнических систем. Однако для того, чтобы шаговые двигатели реализовали свой потенциал в этих приложениях, важно иметь четкое представление о том, как управлять шаговыми двигателями с использованием различных доступных методов управления напряжением.
Основы управления шаговым двигателемПо сути, основным методом управления шаговым двигателем является включение и выключение катушек, окружающих шестерню, в правильной последовательности.
Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений.Изменения в подаче тока на шаговый двигатель могут привести к чрезвычайно тонким и точным различиям в позиционировании. Точность шагового двигателя зависит от количества его шагов, то есть от количества различных позиций, которые он занимает в течение полного цикла вращения. Шаговый двигатель с большим количеством шагов будет в большей степени способен создавать более точные различия в позиционировании. Уровень точности, которого может достичь шаговый двигатель, известен как разрешение двигателя.
Основные режимы управления шаговым двигателем:
- Волновой привод/Однофазный: последовательно активируется одна катушка. Это самый простой режим работы шагового двигателя, дающий самое низкое разрешение.
- Полный шаг: Две катушки последовательно активируются одновременно, поэтому полярные положения ротора фактически находятся между каждой катушкой. Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешающую способность двигателя, поскольку число шагов остается прежним.
- Полушаг: Активируется одна катушка, а затем одновременно активируются две катушки на следующем этапе. Таким образом, ротор перемещается на полшага за раз от положения прямого выравнивания, когда активна одна катушка, до положения раздельного выравнивания, когда активны две катушки. Этот режим фактически добавляет дополнительные шаги к вращению двигателя, поэтому он существенно увеличивает разрешение.
- Микрошаг: Катушки активируются серией синусоидальных импульсов, которые перемещают ротор очень маленькими шагами. Этот метод дает самое высокое разрешение из всех перечисленных здесь, благодаря его способности подразделять полный цикл ротора на 256 шагов. Микрошаг также перемещает ротор очень плавно и последовательно, что помогает снизить вибрацию, шум и износ компонентов двигателя. Благодаря этим преимуществам микрошаговый режим является наиболее распространенным режимом активации шаговых двигателей в современных приложениях.
Также можно увеличить разрешение шагового двигателя, увеличив количество катушек и полюсов. Большинство шаговых двигателей, используемых профессиональными инженерами, имеют большое количество катушек, которые обеспечивают около 200 шагов до микрошага. В совокупности эти параметры дают инженерам, использующим шаговые двигатели, множество различных возможностей для повышения точности разрешающей способности двигателя.
Каждый шаговый двигатель управляется через схему драйвера, которая передает ток на катушки, чтобы активировать их. Поскольку весь механизм, управляющий шаговым двигателем, начинается с контроллера двигателя, очень важно, чтобы элементы управления шаговым двигателем были разработаны тщательно и в соответствии с передовыми методами. В следующих разделах мы кратко рассмотрим основы, которые вам необходимо знать при разработке схемы драйвера шагового двигателя.
Основы выбора привода шагового двигателяСхема привода шагового двигателя обычно подключается к микроконтроллеру, который обеспечивает оператору двигателя контроль над импульсами напряжения, посылаемыми на катушки. Для схем шагового привода доступно множество различных вариантов, в том числе некоторые модели, предназначенные для готового использования в качестве контроллера шагового двигателя. Другие используют программируемые микроконтроллеры, такие как Arduino Uno, которые можно запрограммировать с помощью библиотеки управления шаговыми двигателями с открытым исходным кодом.
При выборе схемы драйвера шагового двигателя начните с четырех основных факторов:
- Напряжение: Драйвер должен быть рассчитан на самые разные уровни напряжения, так как вам, вероятно, придется протестировать различные напряжения, чтобы найти наилучший вариант. Ваш шаговый двигатель.
- Ток: Драйвер должен быть рассчитан как минимум в 1,4 раза от максимального номинального тока шагового двигателя.
- Микрошаг: Драйвер должен иметь несколько вариантов разрешения шага, чтобы вы могли экспериментировать с различными настройками микрошага.
- Максимальный импульс шага: Драйвер должен быть рассчитан на достаточное количество импульсов шага для вращения ротора со скоростью, требуемой вашим приложением.
Несмотря на относительно простую конструкцию шаговых двигателей, определение правильного шагового двигателя и разработка соответствующей системы управления могут быть сложной задачей. На четыре фактора, которые мы только что обсудили, может влиять множество других факторов, заслуживающих внимания.
При проектировании системы, включающей шаговый двигатель, обязательно учитывайте следующее:
- Если в вашем приложении требуются определенные скорости вращения и крутящий момент, подбор правильного двигателя и привода может оказаться сложной задачей, даже если вышеуказанные условия соблюдены. считается. Как правило, наиболее точным методом согласования двигателя и привода является использование инженерного программного обеспечения с соответствующими кривыми скорость-момент. Начните с привода с требуемыми характеристиками напряжения и тока, а затем сопоставьте его с двигателем, используя кривую скорость-момент.
- Несоответствие крутящего момента является распространенной проблемой в конструкции привода шагового двигателя, которая может вызвать остановку (из-за недостаточного крутящего момента) или вибрацию и шум (из-за чрезмерного крутящего момента). Чтобы получить правильный крутящий момент, начните с расчета крутящего момента нагрузки для желаемой задачи, которую должен выполнить двигатель. После того, как вы определили требуемый крутящий момент нагрузки, используйте методы согласования нагрузки и крутящего момента двигателя, чтобы убедиться, что крутящий момент вашего двигателя находится в оптимальном диапазоне.
- Помните, что шаговому двигателю требуется полный ток для создания удерживающего момента, а это означает, что шаговый двигатель может сильно нагреться, если он удерживается в одном положении в течение длительного времени. Обязательно учитывайте это при проектировании систем охлаждения.
- Биполярные шаговые двигатели требуют несколько более сложных схем управления, чем униполярные шаговые двигатели, потому что они должны одновременно передавать отрицательный ток на противоположную катушку. Если вы используете биполярный шаговый двигатель, убедитесь, что ваш привод рассчитан на управление биполярными двигателями.
- Блок управления шаговым двигателем должен быть защищен электрическими шкафами, чтобы защитить его от опасностей окружающей среды. В зависимости от условий эксплуатации двигателя проводка его распределительной коробки может загрязняться пылью и мусором или повреждаться брызгами воды (среди многих других возможных опасностей).
Электрические шкафы Polycase — отличный выбор для инженеров, проектирующих блоки управления шаговыми двигателями. Инженеры выбирают корпуса Polycase, когда им нужна производительность с рейтингом UL, элегантный дизайн и материалы высочайшего качества для корпусов шаговых двигателей.
Кроме того, мы предлагаем варианты индивидуальной настройки корпуса, которые позволяют невероятно быстро и легко модифицировать корпус с помощью вырезов на станке с ЧПУ и цифровой печати.Ниже приведены некоторые из наиболее популярных электрических шкафов для наших промышленных клиентов, которые используют их для защиты оборудования, такого как блоки управления шаговыми двигателями:
- Серия ZH: Прочные навесные поликарбонатные шкафы, подходящие для использования внутри и вне помещений.
- Серия SA: Корпуса для наружного применения из нержавеющей стали с характеристиками, соответствующими их элегантному внешнему виду.
- Серия EX: Корпуса из экструдированного алюминия с красивой отделкой и встроенными направляющими для удобного монтажа на печатной плате.
Прочный и доступный корпус из поликарбоната
Полностью собранный шаговый двигатель, включая металлический корпус.
Вам нужен идеальный электрический шкаф для размещения шагового двигателя и/или блока управления двигателем? Наши специалисты по электромонтажным шкафам всегда рады помочь вам выбрать модель, соответствующую вашим потребностям.
Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.Кредиты изображений
Alexlmx/shutterstock.com
Fouad A. Saad/shutterstock.com
DarkDiamond67/shutterstock.com
Deniseus/shutterstock.com 3
Deniseus/shutterstock.com 3 Deniseus/shutterstock.com 3 9. .com
asharyu/Shutterstock.com
sspopov/Shutterstock.com
sfam_photo/Shutterstock.com /MichaelShutter.comubub 3
20010
Similis/shutterstock.com
Luchschenf/shutterstock.com
Valeriiaes/Shutterstock.com
ДВИГАТЕЛЬ КАТЕПСЕ Юре
В этой статье мы попытаемся объяснить все важные вещи о драйвере шагового двигателя , которые вам нужно знать.
Содержание
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это электронное устройство, используемое для управления шаговым двигателем.
Сам по себе он обычно ничего не делает и должен использоваться вместе с контроллером типа PoKeys57CNC.Существует множество различных типов драйверов шаговых двигателей, но в целом все они делают одно и то же — двигают шаговые двигатели.
Нужен ли драйвер для шагового двигателя?
Да. Шаговым двигателям требуются напряжения и/или токи, которые контроллер просто не может создать. Поэтому нам нужно использовать драйвер шагового двигателя. Это электронное устройство преобразует наши инструкции движения от контроллера в последовательность, в которой обмотка шагового двигателя будет включаться или выключаться, обеспечивая при этом достаточную мощность.
Все это мы, конечно, будем производить с помощью микроконтроллера, управляющего несколькими полевыми транзисторами, но разработка и программирование потребуют времени. К счастью, уже есть существующие решения.
Подводя итог, можно сказать, что контроллеры, как правило, являются чисто цифровыми устройствами с низкой выходной мощностью, поэтому мы используем аналоговый силовой каскад в качестве интерфейса между цифровым (контроллер) и механическим (двигатель) миром.
Как работают драйверы шаговых двигателей?
Основной задачей драйвера является генерация соответствующего сигнала из входных данных для перемещения оси двигателя. Наиболее распространенный подход к управлению шаговым двигателем мы называем Н-мостом. Схемы Н-моста состоят из 4 полевых транзисторов с очень низким сопротивлением между контактами стока и истока (R DSon ) в активном состоянии. В общем случае нам нужно как минимум два H-моста, так как двигатель имеет минимум две катушки. При правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Попеременное возбуждение двух обмоток вызывает смещение оси двигателя.
Движение катушки вперед и назадКак выбрать драйвер шагового двигателя?
При выборе правильного драйвера для нашей системы нам в первую очередь нужна информация о двигателях, которые мы будем использовать. Это основная важная информация. Мы должны выбрать драйвер в соответствии с мощностью, которую драйвер шагового двигателя может передать двигателю.
Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой характеристикой силы тока.Следующее, что нужно рассмотреть, это то, как и чем мы хотели бы управлять в драйвере. Обычно есть настройки на максимальный ток и микрошаг, о которых мы напишем в отдельной главе этой статьи. У нас может быть возможность настроить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, предел защиты от температуры, ток холостого хода и так далее.
Некоторые драйверы мы можем использовать только с контроллером, который генерирует сигналы шага и направления. С другой стороны, другие мы можем вести по разным протоколам связи.
Типы драйверов
Вообще есть два типа драйверов. Драйверы постоянного напряжения (драйверы L/R) и драйверы постоянного тока (драйверы прерывателя).
- драйверы постоянного напряжения (драйверы L/R):
- они дешевле драйверов постоянного тока
- использовать напряжение для создания крутящего момента
- обычно не эффективен
- производительность хуже, чем у драйверов чоппера
- драйверы постоянного тока (драйверы прерывателя):
- дороже
- более сложные схемы
- использовать постоянный ток для создания крутящего момента
- гораздо лучше работает, чем драйверы L/R
Драйверы постоянного тока используются почти всегда, так как доступно много ИС, которые обеспечивают гораздо лучшую производительность. Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Например, PoStep25-256 использует интегральную схему со встроенными полевыми транзисторами и может обеспечивать ток до 2,5 А, в отличие от PoStep60-256, который использует внешние полевые транзисторы и может обеспечивать до 6 А.
Микрошаговый
Шаговые двигатели двигаются шагами, которые обычно составляют 1,8°, то есть 200 шагов на оборот. Это может быть проблемой, когда нам нужны небольшие движения. Одним из вариантов было бы использование какой-либо трансмиссии, но есть и другой способ — микрошаг. Микрошаг означает, что мы можем иметь более 200 шагов за оборот и, в свою очередь, иметь меньшие движения. Эта опция уже интегрирована в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-256.
При управлении шаговыми двигателями с полными шагами выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и производит грубые движения. Чем больше микрошаг, тем больше выходной сигнал похож на синусоиду, и шаговый двигатель движется более плавно.
Но есть в этом и обратная сторона. С увеличением значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет создать достаточный крутящий момент даже для вращения. Обычно 1/4, 1/8 или даже 1/16 могут обеспечить удовлетворительные плавные движения, при этом создавая достаточный крутящий момент.На следующем изображении показано, как изменяется выходной сигнал при выборе различных значений микрошага. Вы можете видеть, что выходной сигнал все больше напоминает синусоиду.
Так что же вообще означают эти значения микрошагов?
Микрошаг говорит нам, сколько микрошагов должен сделать степпер, чтобы произвести один полный шаг. Значение 1/1 говорит нам, что степпер должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется половиной шага и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага. Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот.
Значение 1/8 говорит нам о том, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошагов.Как управлять драйвером шагового двигателя?
Большинство драйверов шаговых двигателей принимают входные сигналы шага и направления. Это означает, что нам нужно только два сигнала для каждого драйвера. Шаговый сигнал используется для создания шагов и выглядит как ШИМ-сигнал. Каждый импульс означает, что степпер будет двигаться на один шаг (или микрошаг). Сигнал направления используется для указания направления (по часовой стрелке или против часовой стрелки) шагового двигателя. Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому подходящим управлением драйвера является стандартный протокол связи, такой как MODBUS, USB или I2C.
Конфигурация параметров драйвераКак подключить шаговый двигатель?
Если вы изучали шаговые двигатели, то могли заметить, что у них разное количество соединительных проводов.
Наиболее распространены двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.Заключение
Мы выяснили, что драйвер шагового двигателя необходим, если в нашей конструкции требуется использование шагового двигателя, поскольку контроллер не может выдавать достаточный ток и достаточно высокое напряжение. Существуют разные типы, но драйверы чоппера обеспечивают наилучшую производительность. Кроме того, микрошаг предлагает на первый взгляд отличное решение, но создает проблему снижения крутящего момента. Он по-прежнему чрезвычайно полезен, но мы должны использовать его правильно. Существует множество различных интегральных схем для управления шаговым двигателем, а также множество уже готовых решений, таких как PoStep25-256 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
И если вы хотите узнать больше, вот отличная отправная точка.
p.
s.: Статья о драйверах шаговых двигателей была SEO-оптимизирована с помощью словенского SEO-фрилансера Seo-Praktik.si.Кроме того, вы можете проверить некоторые из наших последних блогов и продуктов, которые могут помочь вам улучшить ваши машины или получить некоторые идеи, как сделать их еще лучше:
- плазменный делитель напряжения (продукт)
- Датчик самонаведения (продукт) и сообщение в блоге о датчике самонаведения,
- что такое плазменная резка с ЧПУ (блог),
- Драйвер биполярного шагового двигателя — PoStep25-256 — продукт
- Тестер печатных плат — для PoStep25-256 — блог
- 4-я ось для ЧПУ — блог
- Введение в аппаратную электронику ЧПУ — блог
- оборудование для плазменной резки — блог
- что такое плазменная резка с ЧПУ — блог
- что такое плазменная плавающая головка с ЧПУ — блог
- руководство по поиску и устранению неисправностей плазменного резака — блог
- контроль высоты резака — THC
Related Posts
Как выбрать USB-осциллограф
Характеристики USB-осциллографа В предыдущем посте мы рассказали о ключевых характеристиках производительности.
..Подробнее
Auggie — программное обеспечение контроллера станка с ЧПУ для…
Арт Фенерти, оригинальный автор или контроллер станка с ЧПУ Mach4…
Подробнее
4th ось для ЧПУ — МАЧ5 и…
В этом блоге мы расскажем, как мы модернизируем нашу…
Подробнее
Как использовать шаговый двигатель?
Управление шаговыми двигателями — обширная тема, и эта статья представляет собой упрощенное руководство для начинающих по использованию шаговых двигателей. Он охватывает основы работы шаговых двигателей. Его цель — помочь новичкам запустить шаговые двигатели.
Для привода шагового двигателя обычно требуется следующее оборудование:
- Шаговый двигатель
- Драйвер шагового двигателя
- Контроллер
- Импульсный блок питания
Шаговый двигатель представляет собой электромагнитное устройство, которое движется дискретными шагами.
Он имеет несколько катушек, которые организованы в фазы. Когда на каждую фазу по очереди подается питание, это заставляет двигатель двигаться. Благодаря шаговым двигателям вы можете добиться точного позиционирования и контроля скорости. Существует три основных способа управления шаговым двигателем. Этими тремя способами управления являются полношаговый привод, полушаговый привод и микрошаг.Вам необходимо выбрать правильный шаговый двигатель для ваших требований к скорости и крутящему моменту на основе таких данных, как размер корпуса, угол шага, удерживающий момент, номинальный ток, количество выводов, а также однополярный или биполярный. Далее я объясню некоторые из этих важных концепций.
Nema: Nema не является стандартом для электрических характеристик шаговых двигателей. Это просто стандарт для лицевых панелей и монтажных отверстий, облегчающий взаимозаменяемость двигателей. Например, «17» в «NEMA 17» относится к размеру лицевой панели, который в стандарте NEMA представляет собой «число» NEMA, деленное на 10 дюймов.
Таким образом, двигатель NEMA 17 имеет лицевую панель шириной примерно 1,7 дюйма.Угол шага: Угол шага указывает угол поворота шагового двигателя, когда система управления отправляет сигнал шагового импульса. Угол шага обычного двухфазного шагового двигателя составляет 0,9°/1,8°, трехфазного шагового двигателя — 1,2°, а пятифазного шагового двигателя — 0,72°.
Скорость-момент: Рабочие характеристики шаговых двигателей на малых скоростях имеют большее практическое значение. Шаговые двигатели обычно работают со скоростью от 300 до 600 об/мин. Учитывая, что пользователь использует механическое редукционное устройство для переноса нагрузки, нормальная скорость двигателя часто выбирается на уровне десятков об/мин, чтобы обеспечить достаточный крутящий момент для двигателя. При этом двигатель обеспечивает высокое усилие, высокий КПД и низкий уровень шума.
Что касается проблемы с вибрацией, то ее следует решить путем увеличения разрядности диска. Подразделение — это управление приводом двигателя после того, как каждый импульс, отправленный вышестоящим компьютером, подразделяется на множитель, установленный приводом.
Проще говоря, это уменьшение угла шага двигателя на множитель деления.Формула расчета скорости двигателя: Скорость двигателя (единица измерения: об/мин) = частота импульсов (единица измерения: Гц)*60/дел.
Удерживающий момент: Удерживающий момент — это величина крутящего момента, необходимая для перемещения двигателя на один полный шаг, когда катушки находятся под напряжением, а ротор неподвижен. Обмотка шагового двигателя находится под напряжением, даже если сам ротор неподвижен. Это необходимо для удержания груза на месте в неподвижном состоянии.
Тип вала: Вам необходимо знать физическую форму вала этого двигателя, чтобы согласовать шаговый двигатель с шестернями, шкивами и другими внешними соединениями, такими как муфты вала. Есть несколько распространенных форм. Кроме того, необходимо учитывать длину вала.
Некоторые распространенные типы валов перечислены ниже:
- Круглый вал — вал круглой формы
- Вал «D» — вал «D» формы, который полезен для монтажа шестерен с установочными винтами.
- Вал с редуктором — вал с выгравированной на нем шестерней.
- Вал ходового винта — вал в форме винта, используемый для создания линейных приводов.
Номинальный ток: Относится к пиковому току. Это полезная спецификация, поскольку она позволяет вам выбрать подходящий драйвер и источник питания для вашего шагового двигателя.
2. Драйвер шагового двигателяДрайвер шагового двигателя, как правило, должен использоваться в сочетании с шаговым двигателем, поэтому при покупке шагового двигателя лучше всего подобрать подходящий драйвер одновременно, чтобы уменьшить количество проблем в будущем. .
Почти все драйверы шаговых двигателей используют стандартный протокол для управления двигателем. Он использует 3 контакта:
ENABLE. Драйвер будет работать только тогда, когда на контакте ENABLE установлен НИЗКИЙ или ВЫСОКИЙ уровень, в зависимости от драйвера.
НАПРАВЛЕНИЕ — при НИЗКОМ уровне двигатель будет вращаться в одном направлении, а при ВЫСОКОМ — в другом.
Это связано с тем, как вы подключаете двигатель.STEP — Всякий раз, когда вывод STEP переходит от низкого уровня к высокому, степпер делает один шаг (или микрошаг, в зависимости от настроек драйвера).
3. КонтроллерКонтроллер шагового двигателя способен отправлять высокоскоростные импульсные сигналы и является программируемым. ПЛК, микроконтроллеры и другие устройства являются распространенными контроллерами на рынке.
4. Импульсный блок питанияДля шагового двигателя лучше использовать импульсный блок питания. Он обладает сильной защитой от помех и допускает широкий диапазон колебаний. Ток необходимо выбирать в соответствии с величиной нагрузки. Необходимо оставить определенный запас. Например, ток шагового двигателя 3А, ток нагрузки управления 2А, импульсный источник питания должен быть выбран от 6А до 8А.
Типы шаговых двигателей, драйверы и схемы подключения Биполярные и униполярные двигателиШаговые двигатели бывают двух типов: униполярные и биполярные.
Самая большая разница между ними заключается в том, что оба разных типа имеют свои собственные схемы обмотки, и их соответствующие схемы обмотки влияют на то, как управляются их шаговые двигатели.4-проводной двигатель может управляться только биполярным драйвером. 5-проводной двигатель может управляться только униполярным драйвером, потому что центральный отвод соединен внутри. 6-проводные и 8-проводные двигатели могут использовать оба типа драйверов, потому что вы можете решить, как их подключить извне.
В сущности, униполярные и биполярные моторы работают совершенно одинаково. Электромагниты открываются последовательно, заставляя центральный вал двигателя вращаться. Они различаются по способу подачи питания на катушки внутри двигателя.
Униполярный двигатель обеспечивает смену полярности через центральный отвод катушки, но одновременно возбуждает только половину катушки, поэтому он имеет меньший крутящий момент.
Биполярный драйвер использует схему Н-моста для фактического изменения направления тока, протекающего по каждой фазе.
Поочередно подавая питание на каждую фазу, все катушки можно использовать для вращения двигателя.Двухфазный биполярный двигатель имеет два набора катушек. Двухфазные биполярные двигатели имеют четыре провода, по два на каждую фазу. Для некоторых двигателей с гибкой проводкой можно использовать двигатель как биполярный или униполярный.
Униполярный привод
Двухполярный привод
Драйвер постоянного напряжения и драйвер постоянного тока : постоянное напряжение и постоянный ток. Драйвер постоянного напряжения обеспечивает фиксированное напряжение для двигателя, в то время как драйвер постоянного тока обеспечивает постоянный ток для двигателя, манипулируя напряжением. Драйвер постоянного напряжения также известен как драйвер L/R. Драйвер постоянного тока также известен как драйвер прерывателя.Из-за ограничений по крутящему моменту и скорости приводов L/R в настоящее время более популярны драйверы постоянного тока.
Драйверы постоянного напряжения чаще всего используются для униполярных шаговых двигателей.При использовании драйверов постоянного напряжения номинальное напряжение двигателя в большинстве случаев не имеет значения для практического применения. Поэтому не поддавайтесь влиянию шаговых двигателей с очень низким номинальным напряжением. Важным значением, на которое следует обратить внимание, является номинальный ток. Шаговые драйверы STEPPERONLINE в настоящее время являются драйверами постоянного тока!
Драйвер постоянного тока может управлять шаговым двигателем при гораздо более высоком напряжении, чем номинальное напряжение двигателя. Более высокое напряжение позволяет току проходить через шаговый двигатель быстрее, что позволяет ему вращаться быстрее и получать больший крутящий момент. Драйвер поддерживает ток в двигателе ниже фиксированного значения, что предотвращает перегорание двигателя. Фиксированный ток обычно устанавливается потенциометром на плате привода. Это позволяет изменять максимальный ток в зависимости от необходимого крутящего момента и номинального тока спецификации двигателя.
Кроме того, более высокое напряжение означает меньшее выделение тепла.Привод постоянного напряжения
Привод постоянного тока
Как подключить шаговый двигатель к драйверуВам нужно выяснить, какие провода составляют пары катушек. Вот три способа выяснить это.
1.Можно воспользоваться мультиметром и измерить сопротивление между проводами, идущими от шагового двигателя. Если у вас есть чтение, это пара. Если нет, то это не пара.
2. Кроме того, если у вас нет мультиметра, крутите двигатель, касаясь проводов. Какая бы комбинация не мешала движению мотора, это пара.
3.Конечно, перебирать все возможные комбинации соединений омметром или на ощупь нецелесообразно. Еще проще всего подключить мотор по его техпаспорту. Если у вас его еще нет, прочтите номер модели на двигателе и выполните поиск в Интернете. Возможно, вам придется связаться с поставщиком, чтобы получить паспорт двигателя. STEPPERONLINE предоставляет соответствующий техпаспорт, или вы можете связаться со службой поддержки, если что-то еще неясно.
На следующей схеме показано несколько различных схем обмотки:
Перемещение двигателяПосле того, как вы все подключили правильно, вы можете загрузить прошивку в микроконтроллер, такой как Arduino. При создании некоторых нестандартных вещей вам нужно запрограммировать их на Arduino. Вы можете использовать библиотеку Arduino Stepper, которая поставляется вместе с Arduino IDE. Библиотека шаговых двигателей обрабатывает последовательность импульсов, которые мы будем отправлять на шаговые двигатели, и ее можно использовать для различных двигателей, включая униполярные и биполярные.
В настоящее время встроенная библиотека шаговых двигателей Arduino может управлять только одним шаговым двигателем. Если вам нужно управлять двумя или более шаговыми двигателями, библиотека AccelStepper является очень хорошим выбором. Библиотека AccelStepper — высокоуровневая библиотека, написанная Майком Макколи. Вам нужно будет использовать диспетчер библиотек Arduino IDE для установки этой библиотеки, так как она не включена в Arduino IDE.
Я надеюсь, что эта статья дала вам представление о том, как управлять шаговым двигателем на самом простом уровне, и что в конце концов шаговые двигатели не так уж сложны в использовании. Если вы разрабатываете проект, который требует, чтобы вы могли точно позиционировать что-либо, то шаговый двигатель — идеальный выбор.
Управление шаговым двигателем | Microchip Technology
Вам необходимо точное управление положением с большим удерживающим моментом? Если это так, то шаговые двигатели — лучшее решение. Хотя почти каждый предлагаемый нами микроконтроллер (MCU) или контроллер цифровых сигналов (DSC) может управлять шаговым двигателем, некоторые устройства подходят для этого лучше, чем другие: решения для управления традиционными шаговыми двигателями
- DSC dsPIC33, 32-разрядные микроконтроллеры PIC32MK и Arm ® Cortex ® -M4F и M7 микроконтроллеры SAM предлагают производительность DSP и периферийные устройства для управления двигателем для расширенного управления шаговым двигателем с обратной связью, субмикрошагового режима, высокоскоростного вращения и полного выходного крутящего момента
- IGLOO ® 2 и SmartFusion ® 2 Решения для управления шаговыми двигателями на основе FPGA поддерживают до 2048 микрошагов, что приводит к уменьшению пульсаций крутящего момента и потерь мощности в двигателе
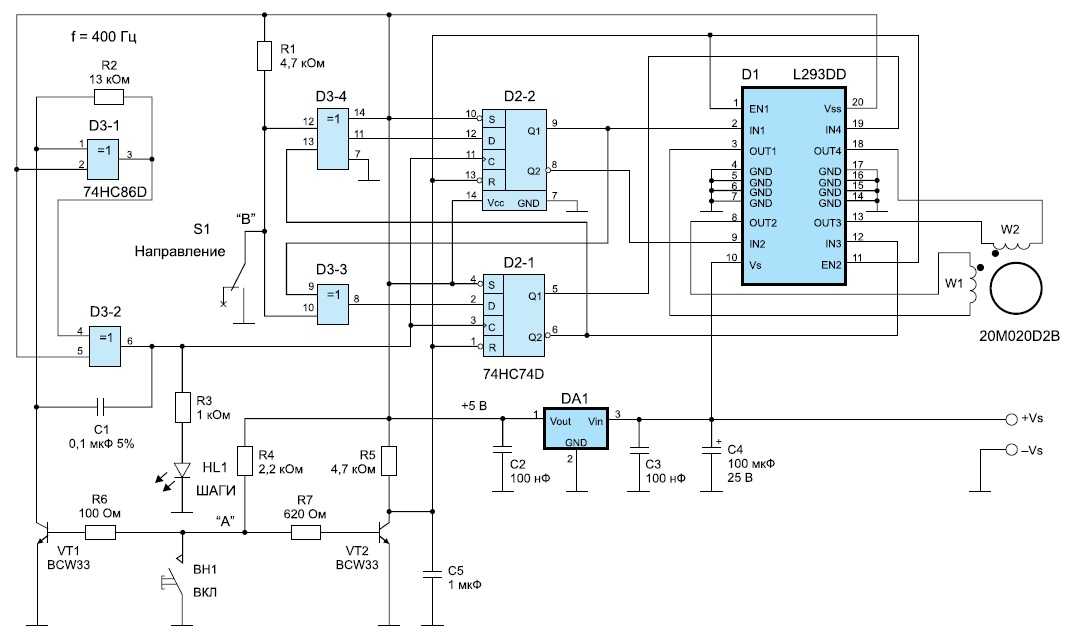 Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную катушке статора, которая находится под напряжением, сложнее и дороже. Однако их более плавная и точная работа делает их более подходящими для промышленного применения.
Биполярные шаговые двигатели, которые также передают обратный ток на катушку, противоположную катушке статора, которая находится под напряжением, сложнее и дороже. Однако их более плавная и точная работа делает их более подходящими для промышленного применения. Распространенные применения шаговых двигателей в робототехнике включают:
Распространенные применения шаговых двигателей в робототехнике включают: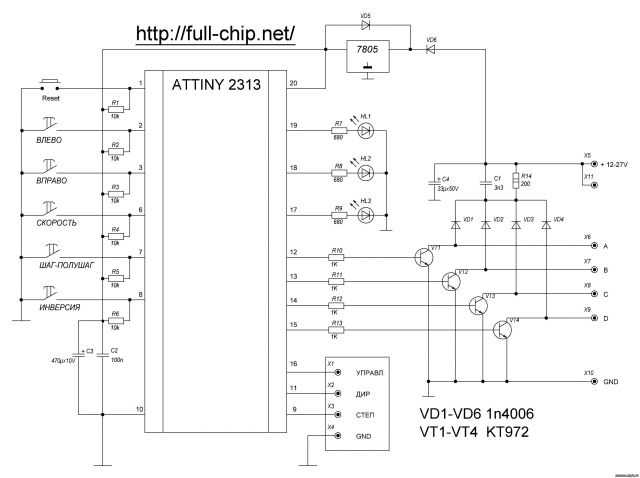 Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений.
Изменение последовательности и времени активации катушки — это то, как инженеры настраивают работу шагового двигателя в соответствии с потребностями своих приложений. Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешающую способность двигателя, поскольку число шагов остается прежним.
Этот режим полезен для улучшения крутящего момента и скорости двигателя, но он не увеличивает разрешающую способность двигателя, поскольку число шагов остается прежним. Благодаря этим преимуществам микрошаговый режим является наиболее распространенным режимом активации шаговых двигателей в современных приложениях.
Благодаря этим преимуществам микрошаговый режим является наиболее распространенным режимом активации шаговых двигателей в современных приложениях.

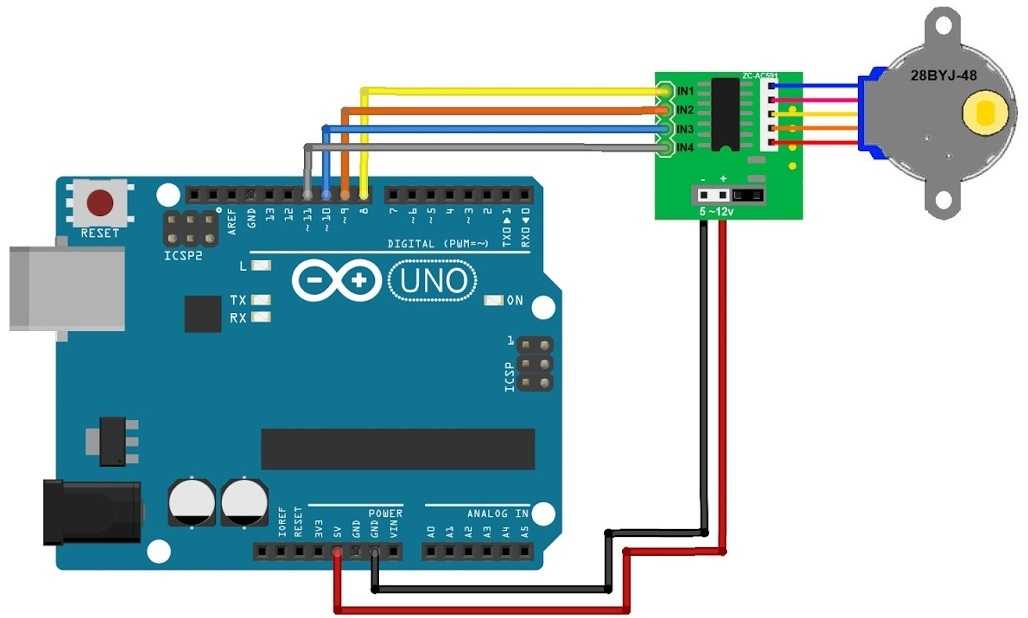 считается. Как правило, наиболее точным методом согласования двигателя и привода является использование инженерного программного обеспечения с соответствующими кривыми скорость-момент. Начните с привода с требуемыми характеристиками напряжения и тока, а затем сопоставьте его с двигателем, используя кривую скорость-момент.
считается. Как правило, наиболее точным методом согласования двигателя и привода является использование инженерного программного обеспечения с соответствующими кривыми скорость-момент. Начните с привода с требуемыми характеристиками напряжения и тока, а затем сопоставьте его с двигателем, используя кривую скорость-момент.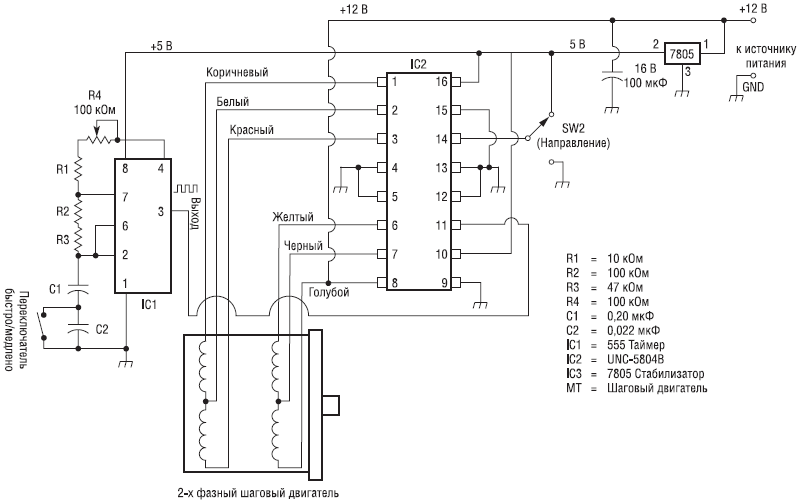 Обязательно учитывайте это при проектировании систем охлаждения.
Обязательно учитывайте это при проектировании систем охлаждения.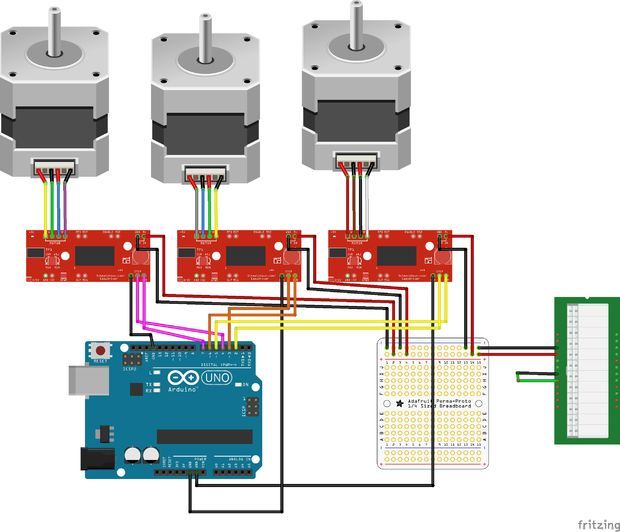 Кроме того, мы предлагаем варианты индивидуальной настройки корпуса, которые позволяют невероятно быстро и легко модифицировать корпус с помощью вырезов на станке с ЧПУ и цифровой печати.
Кроме того, мы предлагаем варианты индивидуальной настройки корпуса, которые позволяют невероятно быстро и легко модифицировать корпус с помощью вырезов на станке с ЧПУ и цифровой печати. Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.
Позвоните в Polycase по телефону 1-800-248-1233, чтобы поговорить со специалистом по корпусам, или свяжитесь с нами через Интернет в любое время.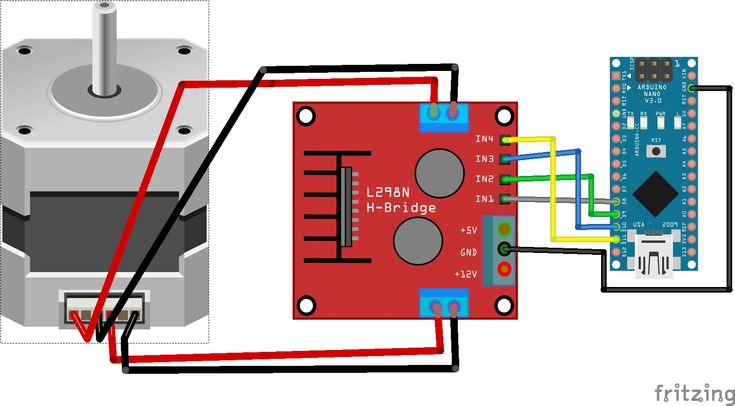 Сам по себе он обычно ничего не делает и должен использоваться вместе с контроллером типа PoKeys57CNC.
Сам по себе он обычно ничего не делает и должен использоваться вместе с контроллером типа PoKeys57CNC.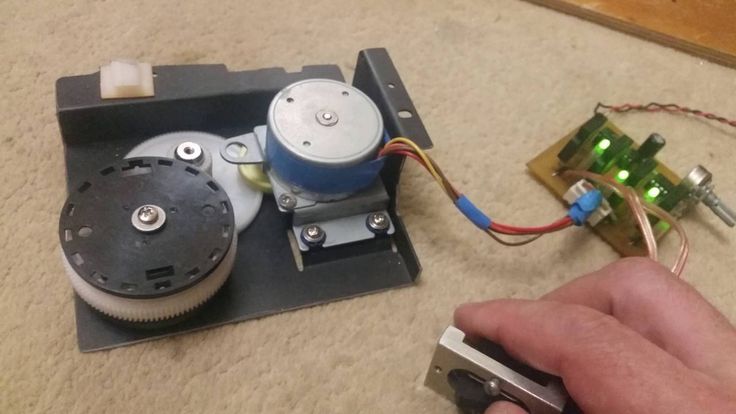
 Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой характеристикой силы тока.
Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой характеристикой силы тока.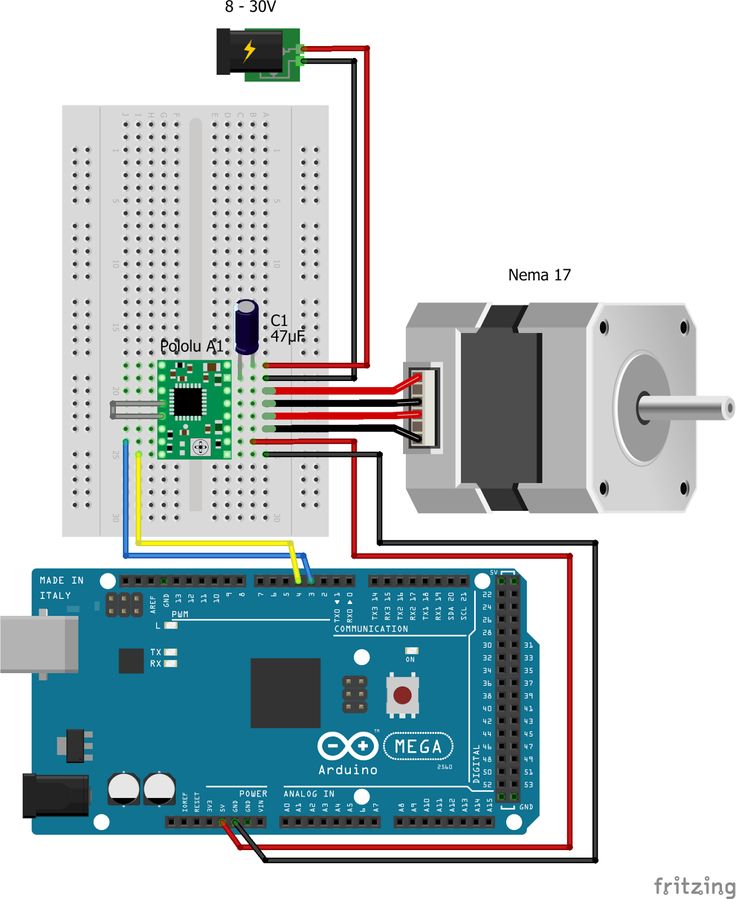
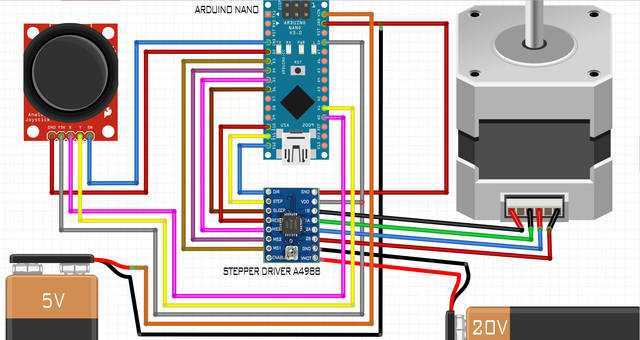
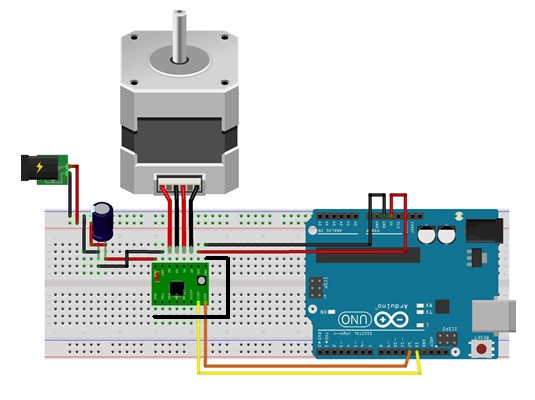 Но есть в этом и обратная сторона. С увеличением значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет создать достаточный крутящий момент даже для вращения. Обычно 1/4, 1/8 или даже 1/16 могут обеспечить удовлетворительные плавные движения, при этом создавая достаточный крутящий момент.
Но есть в этом и обратная сторона. С увеличением значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет создать достаточный крутящий момент даже для вращения. Обычно 1/4, 1/8 или даже 1/16 могут обеспечить удовлетворительные плавные движения, при этом создавая достаточный крутящий момент.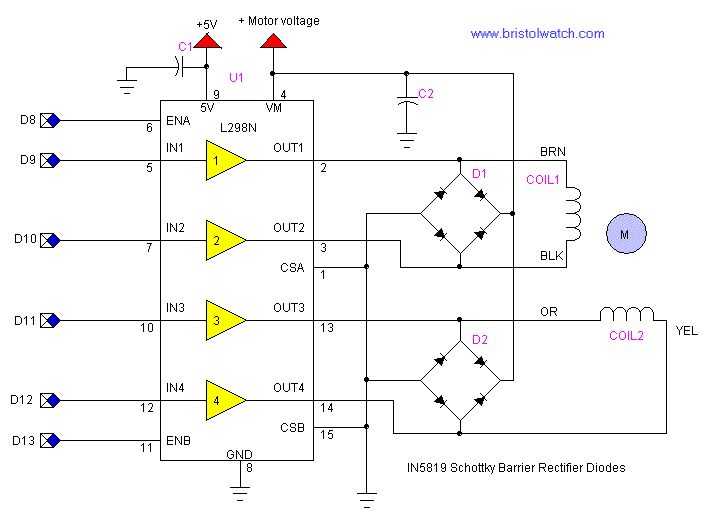 Значение 1/8 говорит нам о том, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошагов.
Значение 1/8 говорит нам о том, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошагов.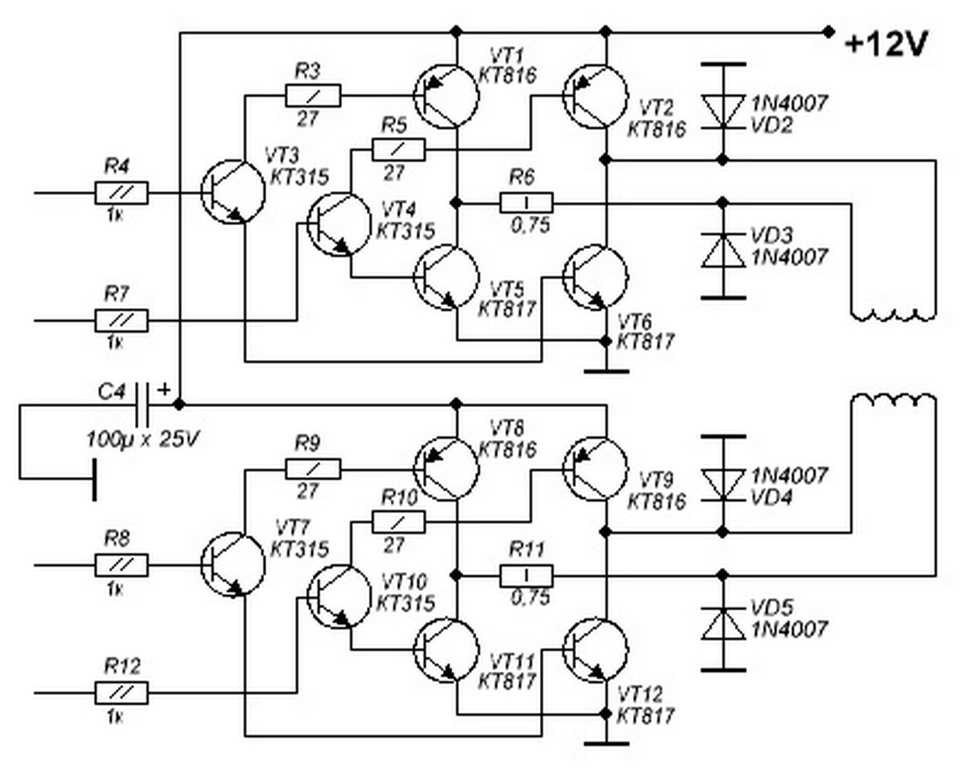 Наиболее распространены двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.
Наиболее распространены двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами. s.: Статья о драйверах шаговых двигателей была SEO-оптимизирована с помощью словенского SEO-фрилансера Seo-Praktik.si.
s.: Статья о драйверах шаговых двигателей была SEO-оптимизирована с помощью словенского SEO-фрилансера Seo-Praktik.si. ..
.. Он имеет несколько катушек, которые организованы в фазы. Когда на каждую фазу по очереди подается питание, это заставляет двигатель двигаться. Благодаря шаговым двигателям вы можете добиться точного позиционирования и контроля скорости. Существует три основных способа управления шаговым двигателем. Этими тремя способами управления являются полношаговый привод, полушаговый привод и микрошаг.
Он имеет несколько катушек, которые организованы в фазы. Когда на каждую фазу по очереди подается питание, это заставляет двигатель двигаться. Благодаря шаговым двигателям вы можете добиться точного позиционирования и контроля скорости. Существует три основных способа управления шаговым двигателем. Этими тремя способами управления являются полношаговый привод, полушаговый привод и микрошаг. Таким образом, двигатель NEMA 17 имеет лицевую панель шириной примерно 1,7 дюйма.
Таким образом, двигатель NEMA 17 имеет лицевую панель шириной примерно 1,7 дюйма. Проще говоря, это уменьшение угла шага двигателя на множитель деления.
Проще говоря, это уменьшение угла шага двигателя на множитель деления.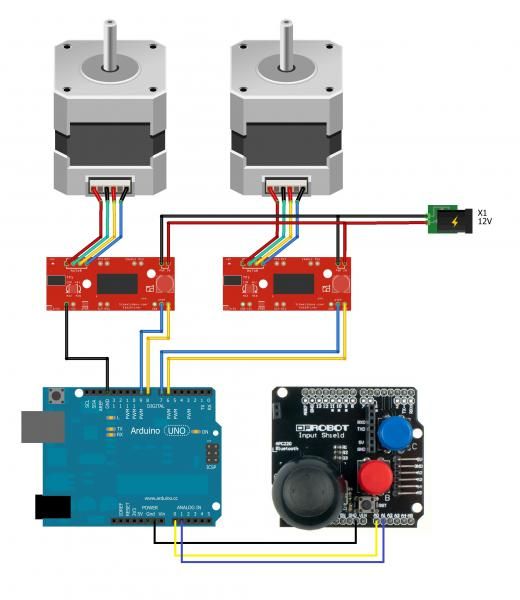
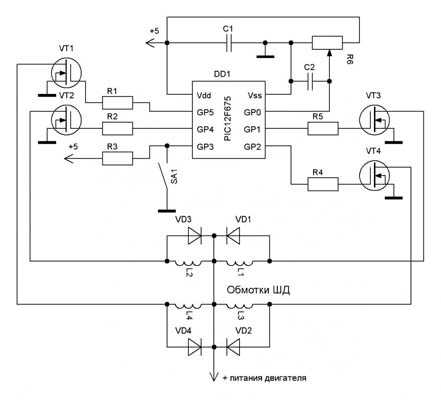 Это связано с тем, как вы подключаете двигатель.
Это связано с тем, как вы подключаете двигатель. Самая большая разница между ними заключается в том, что оба разных типа имеют свои собственные схемы обмотки, и их соответствующие схемы обмотки влияют на то, как управляются их шаговые двигатели.
Самая большая разница между ними заключается в том, что оба разных типа имеют свои собственные схемы обмотки, и их соответствующие схемы обмотки влияют на то, как управляются их шаговые двигатели.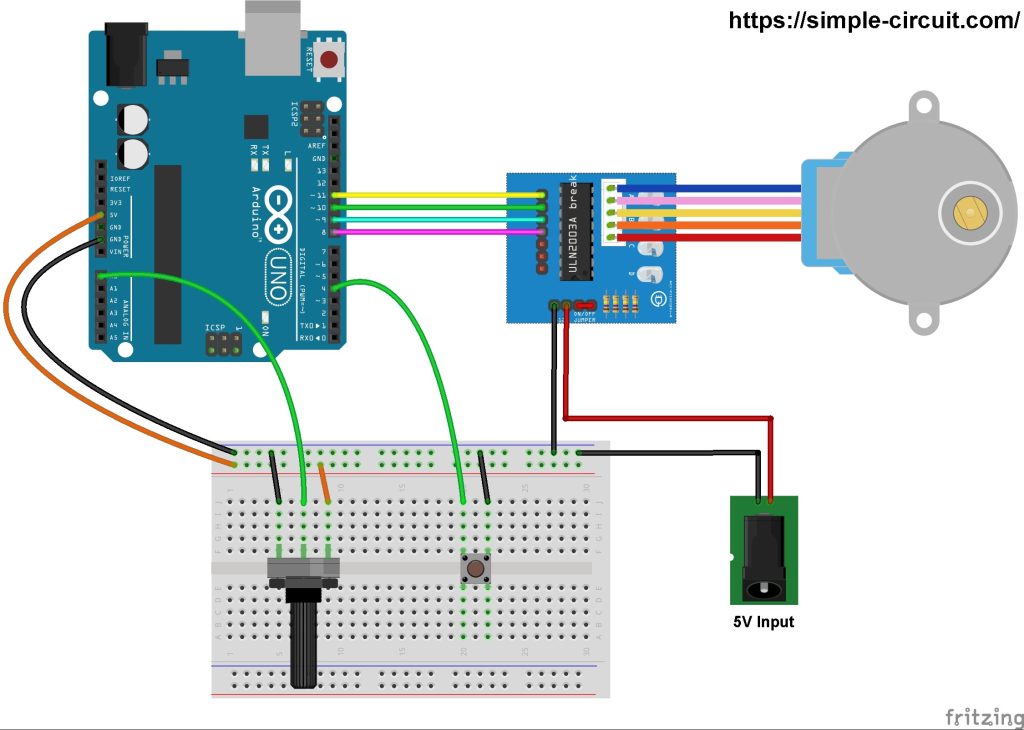 Поочередно подавая питание на каждую фазу, все катушки можно использовать для вращения двигателя.
Поочередно подавая питание на каждую фазу, все катушки можно использовать для вращения двигателя. Драйверы постоянного напряжения чаще всего используются для униполярных шаговых двигателей.
Драйверы постоянного напряжения чаще всего используются для униполярных шаговых двигателей.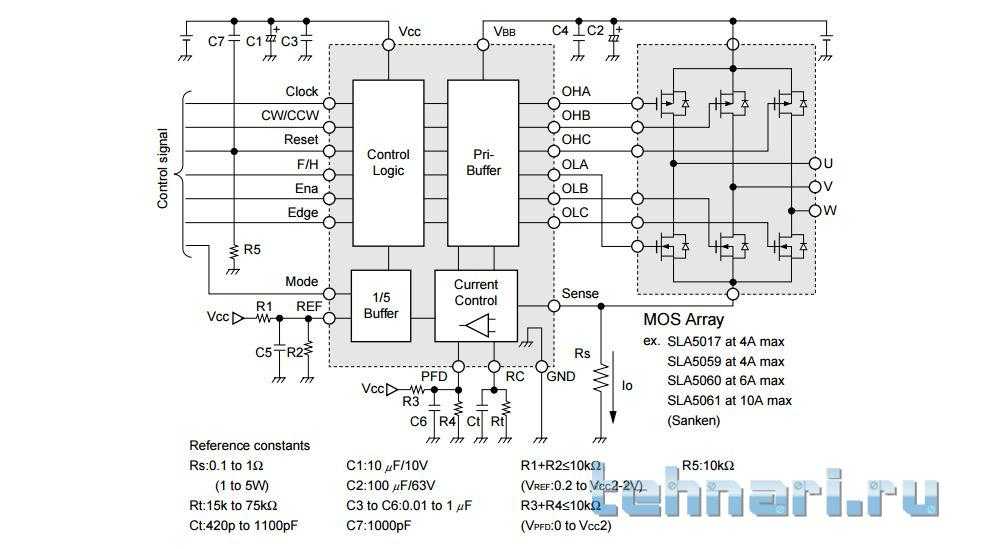 Кроме того, более высокое напряжение означает меньшее выделение тепла.
Кроме того, более высокое напряжение означает меньшее выделение тепла.

Мы также предлагаем полную линейку двойных полномостовых драйверов, предназначенных для управления биполярными шаговыми двигателями и легко подключаемых к любому микроконтроллеру.
Типичные области применения
- Привод управления холостым ходом
- Клапаны рециркуляции отработавших газов
- Лопасти воздуховода
- Элементы управления зеркалом
- Телескопы
- Антенны
- Игрушки
Читать далее
Рекомендуемые продукты для управления шаговыми двигателями
Некоторые основные сведения о шаговых двигателях
Как работает шаговый двигатель
Ротор шагового двигателя с постоянными магнитами состоит из постоянных магнитов и статора с двумя парами обмоток. Ротор состоит из одного магнита, установленного вдоль оси ротора, и двух полюсных наконечников с множеством зубьев. Зубы расположены в шахматном порядке, образуя много выступающих полюсов. Две фазы статора чередуются между включением и выключением и обратной полярностью. Ротор выравнивается с полюсами статора до подачи питания на следующую фазу последовательности.
Коммутация шагового двигателя состоит из четырех шагов:
- Одна фаза отстает от другой фазы на один шаг, что эквивалентно одной четверти электрического цикла или 90°
- Полюса формируются с помощью одного магнита, установленного на одной линии с осью ротора, и двух полюсных наконечников .
- Зубья на полюсных наконечниках расположены в шахматном порядке для получения большого количества полюсов
- Полюса статора шагового двигателя также имеют много зубцов, которые расположены так, что две фазы все еще сдвинуты по фазе на 90°
Характеристики шагового двигателя
- Простота позиционирования – ступенчатое перемещение в зависимости от импульсов, подаваемых на обмотки статора
- Направление вращения изменяется путем реверсирования последовательности импульсов
- Скорость регулируется частотой импульсов или частотой пульса
Внедрение управления шаговым двигателем
Как это работает
Шаговый двигатель легко позиционировать, и он перемещается ступенчато в зависимости от импульсов, подаваемых на обмотки статора.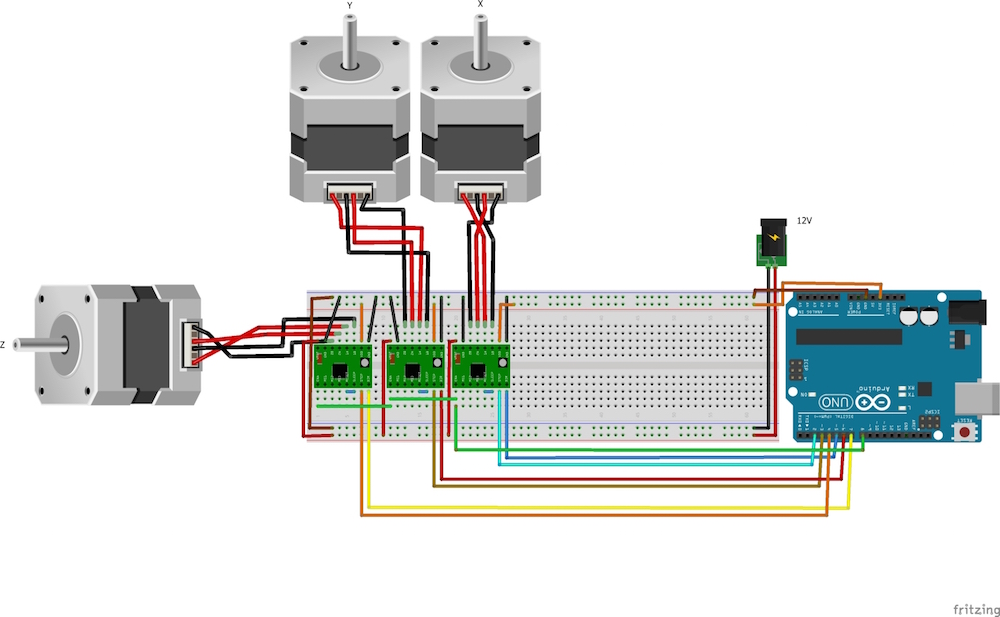 Направление вращения изменяется путем реверсирования последовательности импульсов, а скорость регулируется частотой импульсов или частотой пульса. Раздел о микрошаге ниже демонстрирует этот принцип для шагового двигателя, использующего коммутацию полного шага. Когда ротор выравнивается с одним из полюсов статора, на вторую фазу подается напряжение. Две фазы попеременно включаются и выключаются и меняют полярность. Есть четыре шага. Одна фаза отстает от другой фазы на один шаг. Это эквивалентно одной четверти электрического цикла или 90°. Шаговые двигатели имеют высокий удерживающий момент, но они не могут работать на высоких скоростях.
Направление вращения изменяется путем реверсирования последовательности импульсов, а скорость регулируется частотой импульсов или частотой пульса. Раздел о микрошаге ниже демонстрирует этот принцип для шагового двигателя, использующего коммутацию полного шага. Когда ротор выравнивается с одним из полюсов статора, на вторую фазу подается напряжение. Две фазы попеременно включаются и выключаются и меняют полярность. Есть четыре шага. Одна фаза отстает от другой фазы на один шаг. Это эквивалентно одной четверти электрического цикла или 90°. Шаговые двигатели имеют высокий удерживающий момент, но они не могут работать на высоких скоростях.
Читать далее
Функции микроконтроллера для управления шаговым двигателем
Детали микрошага
Каждый шаговый двигатель будет иметь определенный угол шага, соответствующий полному шагу; микрошаг позволяет расположить вал между этим углом. В примере справа видно, что двухфазный шаговый двигатель имеет угол шага 90°.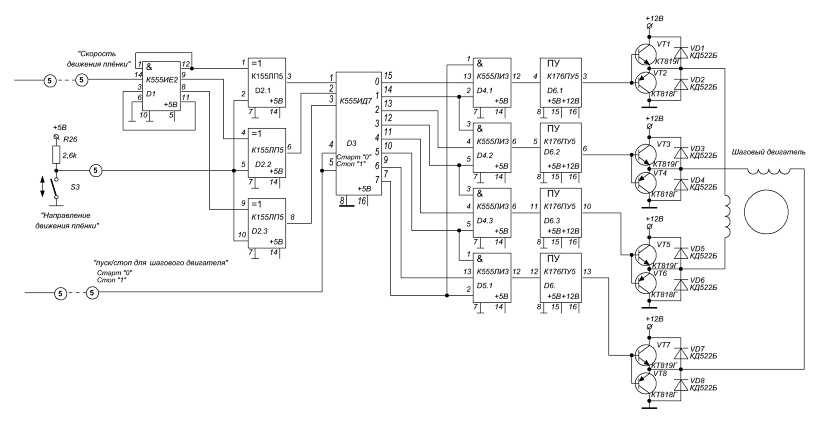 Если вы реализуете методы микрошага, вы можете расположить вал на долю полного угла шага, уменьшив угол шага. Микрошаг дает следующие преимущества:
Если вы реализуете методы микрошага, вы можете расположить вал на долю полного угла шага, уменьшив угол шага. Микрошаг дает следующие преимущества:
- Увеличивает разрешение шага за счет разделения полного шага на подшаги
- Обеспечивает более плавный переход между шагами
- Уменьшает шум и проблемы с резонансом
- Максимизирует выходной крутящий момент как при низкой, так и при высокой скорости шага
Конфигурация драйвера шлюза
Ничего не найдено
Драйвер затвора с однополярным шаговым двигателем
Драйвер затвора с биполярным шаговым двигателем
Многоосевой шаговый двигатель с управлением 9
Создавайте безопасное и надежное многоосевое детерминированное управление двигателем на одной системе на кристалле (SoC) FPGA. ПЛИС обеспечивают множество преимуществ для приложений управления двигателями, в том числе:
- Компактное решение для экономии места на плате и уменьшения размера продукта
- Гибкость проектирования благодаря модульному пакету IP
- Интеграция системных функций SoC для снижения совокупной стоимости владения (TCO)
Читать далее
Узнайте больше о FPGAS для управления двигателем
Скачать ресурсы для FPGAS
Аппаратные и программные решения для управления двигателем
Рекомендуемые программные инструменты
Ничего не найдено
Библиотека алгоритмов и программного обеспечения для управления двигателем
Для поддержки разработки приложений для двигателей мы предоставляем примеры управления щеточными двигателями постоянного тока.
MPLAB® X Integrated Development Environment (IDE)
MPLAB X Integrated Development Environment (IDE) — это расширяемая программа с широкими возможностями настройки, которая включает в себя мощные инструменты, помогающие обнаруживать, настраивать, разрабатывать, отлаживать и аттестовать встроенные конструкции для Микроконтроллеры и контроллеры цифровых сигналов Microchip.
Конфигуратор кода MPLAB (MCC)
Конфигуратор кода MPLAB (MCC) — это бесплатная графическая среда программирования, которая создает бесшовный, простой для понимания код C, который можно вставить в ваш проект.
Рекомендуемые аппаратные инструменты
Ничего не найдено
MTS2916A Оценочная плата драйвера шагового двигателя с двойным мостом
Плата разработки dsPICDEM™ MCSM
Стартовый комплект SmartFusion®2 для управления двухосевым двигателем
Учить больше
Рекомендации по применению
Продукты управления двигателем
- DSC dsPIC33
- Все микроконтроллеры управления двигателем
- 32-разрядные микроконтроллеры
- Драйверы трехфазных двигателей
- Драйверы шаговых/щеточных двигателей постоянного тока
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму.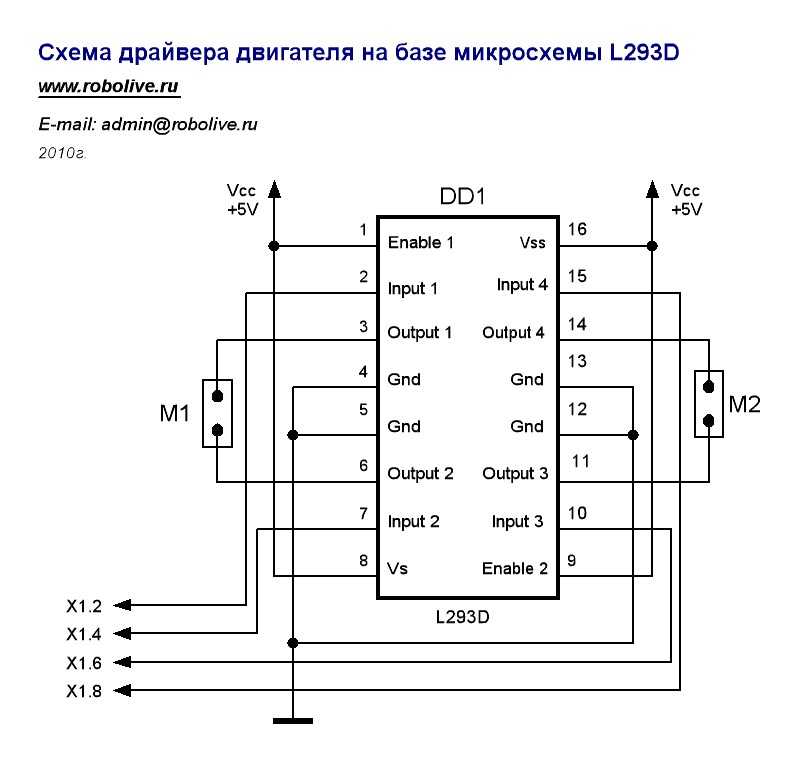 Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти диаграмму, которую вы ищете, пожалуйста, заполните нашу Форма обратной связи на сайте чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти диаграмму, которую вы ищете, пожалуйста, заполните нашу Форма обратной связи на сайте чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму.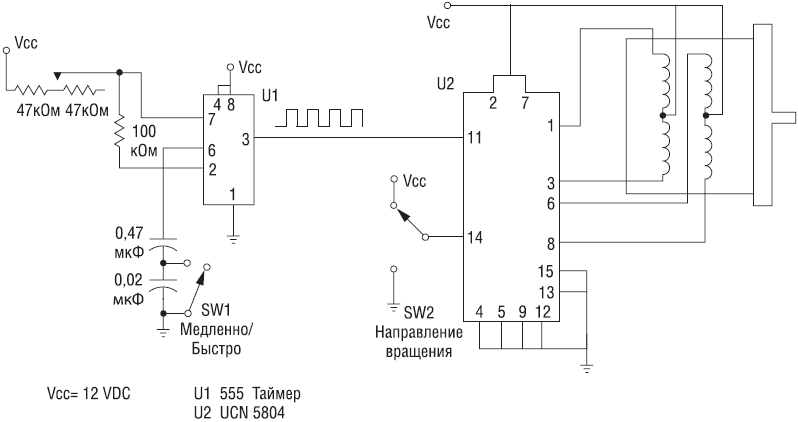 Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти диаграмму, которую вы ищете, пожалуйста, заполните нашу Форма обратной связи на сайте чтобы уведомить нас об этой проблеме.
Документация
- Указания по применению
- Брошюры
- Примеры кода
- Программное обеспечение
- Руководства пользователя
- Белая книга
| Заголовок | Скачать |
|---|---|
| AN1292 — ВОК с двойным шунтированием и ФАПЧ | Скачать |
| AN984 — Введение в управление асинхронным двигателем переменного тока | Скачать |
| AN1305 — бездатчиковое управление 3-фазным бесколлекторным двигателем с PIC16FXXX | Скачать |
| AN1162 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) | Скачать |
| AN1206 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) с использованием ослабления поля | Скачать |
| AN2584 — встроенная коррекция коэффициента мощности (PFC) и бездатчиковая | Скачать |
| AN3049 — Бездатчиковое управление положением щеточного двигателя постоянного тока с использованием метода подсчета пульсаций | Скачать |
| AN955 — VF-управление 3-фазным асинхронным двигателем | Скачать |
| AN900 — Управление трехфазными асинхронными двигателями переменного тока с помощью PIC18F4431 | Скачать |
| AN905 — Основы коллекторного двигателя постоянного тока | Скачать |
| AN967 — Двунаправленное управление VF одно- и трехфазными асинхронными двигателями с использованием PIC16F72 | Скачать |
| AN887 — Основы асинхронного двигателя переменного тока | Скачать |
| AN889 — VF-управление 3-фазными асинхронными двигателями с использованием микроконтроллеров PIC16F7X7 | Скачать |
| AN2520 — Бездатчиковое полеориентированное управление (FOC) для синхронного двигателя с постоянными магнитами (PMSM) с использованием оценщика PLL и ослабления потока на основе уравнения (FW) Примечание по применению | Скачать |
| AN2757 — Сенсорное (на основе энкодера) полеориентированное управление трехфазным синхронным двигателем с постоянными магнитами (PMSM) | Скачать |
| AN2590 — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка Примечание по применению | Скачать |
| AN696 — Серводвигатель постоянного тока PIC18CXXX/PIC16CXXX | Скачать |
| AN843 — Управление скоростью трехфазного асинхронного двигателя с использованием микроконтроллеров PIC18 | Скачать |
| AN822 — микрошаговый шаговый двигатель на PIC18C452 | Скачать |
| AN857 — простое управление бесщеточным двигателем постоянного тока | Скачать |
| Заголовок | Скачать |
|---|---|
| Брошюра по управлению двигателем и приводу | Скачать |
| Заголовок | Скачать |
|---|---|
| CE002 Настройка 10-разрядных аналого-цифровых преобразователей dsPIC DSC для скорости преобразования 1 Мбит/с | Скачать |
| CE019 — Пропорционально-интегрально-дифференциальные (ПИД) регуляторы и управление с обратной связью | Скачать |
| Бездатчиковый анализатор FOC PLL MCLV | Скачать |
| PFC Безсенсорный анализатор FOC PLL MCHV | Скачать |
| CE155 — Пример мониторинга данных в реальном времени (RTDM) | Скачать |
| Заголовок | Скачать |
|---|---|
| Библиотека управления двигателем dsPIC33 для FOC | Скачать |
| Заголовок | Скачать |
|---|---|
| Руководство пользователя макетной платы dsPICDEM MCLV-2 (DM330021-2) | Скачать |
| Руководство пользователя макетной платы dsPICDEM MCSM | Скачать |
| Начальный комплект управления двигателем с руководством пользователя mTouch | Скачать |
| dsPICDEM MCHV-2 Руководство пользователя макетной платы | Скачать |
| Заголовок | Скачать |
|---|---|
| WP100 — Как превратить асинхронный двигатель переменного тока в двигатель постоянного тока (вопрос перспективы) | Скачать |
EasyDriver — Драйвер шагового двигателя — ROB-12779
4.
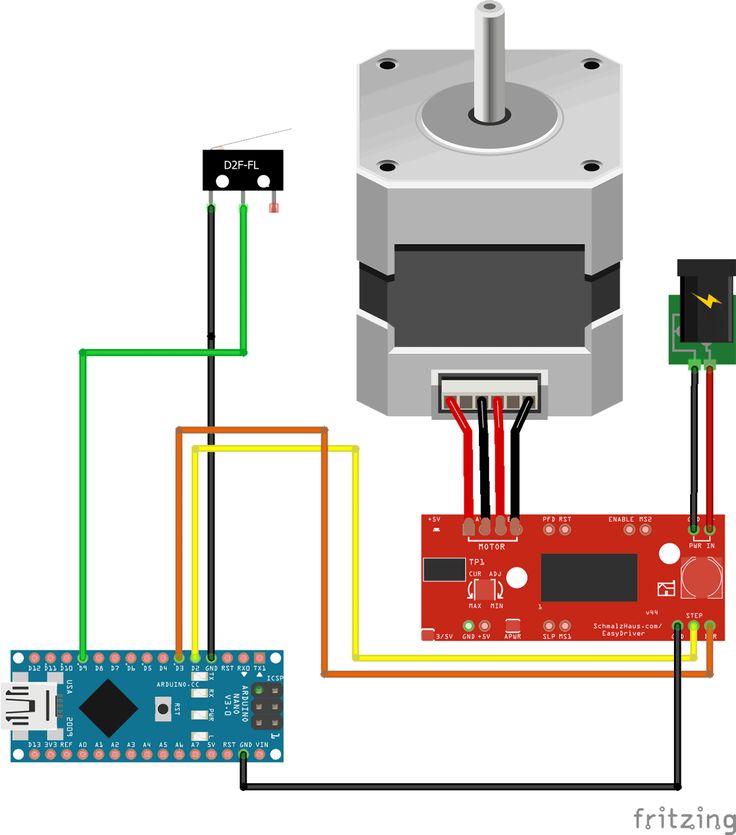 2 из 5
2 из 5На основании 39 оценок:
Сейчас просматриваются все отзывы покупателей.
Показаны результаты со звездным рейтингом.
1 из 1 нашел это полезным:
Управление двигателем стало очень простым!
от пользователя #404942 проверенный покупатель
У меня их 18, чтобы одновременно управлять кучей моторов (ROB-09238). Каждый из них работал безупречно и выдерживал мощность без каких-либо регулировок. Программирование было несложным с использованием библиотеки AccelStepper. Использовал Mega 2560 для управления логикой шага и направления.
Произошла катастрофа: три мои платы были зажаты панелью МДФ и конденсаторы были вырваны напрочь. Я заменил колпачки на типичные полярные колпачки (высокие банки), и платы снова работают нормально.
Я заменил колпачки на типичные полярные колпачки (высокие банки), и платы снова работают нормально.
1 из 1 нашел это полезным:
Умелый маленький водитель
от участника #356554 проверенный покупатель
Честно говоря, это не сработало для проекта, который я планировал. Отсутствие гибкости в выборе + или — общего для моих сигналов было проблемой. Однако я не разочарован, я смогу разрабатывать будущие проекты с учетом этого недостатка. В целом, стоит цена.
1 из 1 нашел это полезным:
Работал отлично, пока я не поджарил его
Брэндон Джеймс проверенный покупатель
После того, как я сделал свой собственный шаговый двигатель, он стоит всех денег, чтобы просто сделать это для вас. Работает фантастически, легко интегрируется, загнал мой прямо с raspberry pi. Выделяет много тепла, если вы используете двигатель на полную мощность, рассмотрите возможность установки вентилятора где-нибудь. Горшок очень маленький, я крутил его металлической отверткой, и он соскользнул, я задел конденсаторы под ним, он заискрился и перестал работать. облом. Я все равно буду заказывать замену! Это зажгло и это весело, Sparkfun.
Редактировать: после проблем с использованием 5 В, которые он подает на тинси, и глядя на схему, в ней нет обратного диода, обязательно включите его в свой проект, если вы собираетесь использовать эту мощность!
Работает фантастически, легко интегрируется, загнал мой прямо с raspberry pi. Выделяет много тепла, если вы используете двигатель на полную мощность, рассмотрите возможность установки вентилятора где-нибудь. Горшок очень маленький, я крутил его металлической отверткой, и он соскользнул, я задел конденсаторы под ним, он заискрился и перестал работать. облом. Я все равно буду заказывать замену! Это зажгло и это весело, Sparkfun.
Редактировать: после проблем с использованием 5 В, которые он подает на тинси, и глядя на схему, в ней нет обратного диода, обязательно включите его в свой проект, если вы собираетесь использовать эту мощность!
4 из 4 нашел это полезным:
Отлично — только будьте осторожны с EMI!
от RobotCamera проверенный покупатель
Работает хорошо.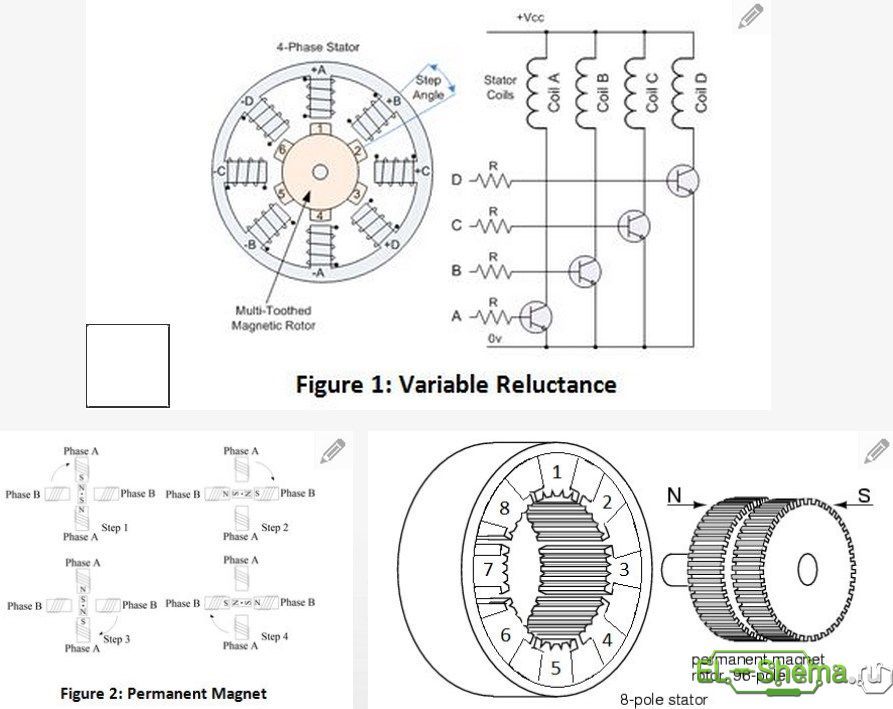 Простота использования буквально с любым микроконтроллером, который только можно себе представить. Я использую свой с Arduino Pro Mini 3,3 В.
Простота использования буквально с любым микроконтроллером, который только можно себе представить. Я использую свой с Arduino Pro Mini 3,3 В.
Просто остерегайтесь электромагнитных помех. Контактные площадки A/B и дорожки, ведущие к ним, вместе с контактами на микросхеме и вашими кабелями, ведущими к шаговому двигателю, сбрасывают массу электромагнитных помех. Это не ошибка платы, это просто то, что происходит, когда вы переключаете шаговый двигатель. Он может возиться с соседними микроконтроллерами и микросхемами. Так что будьте осторожны при планировании своего проекта — устанавливайте некоторое расстояние между EasyDriver + шаговый двигатель и другими компонентами, если можете. Если вы не можете изолировать их на расстоянии, защитите чувствительные компоненты проводящим заземленным материалом.
Я переписывался с Брайаном, когда имел дело с проблемами EMI в моем проекте, он очень хорошо осведомлен и вежлив. Отличная поддержка.
Чип может нагреваться на ощупь. Я рассматриваю возможность добавления радиатора в верхнюю часть чипа.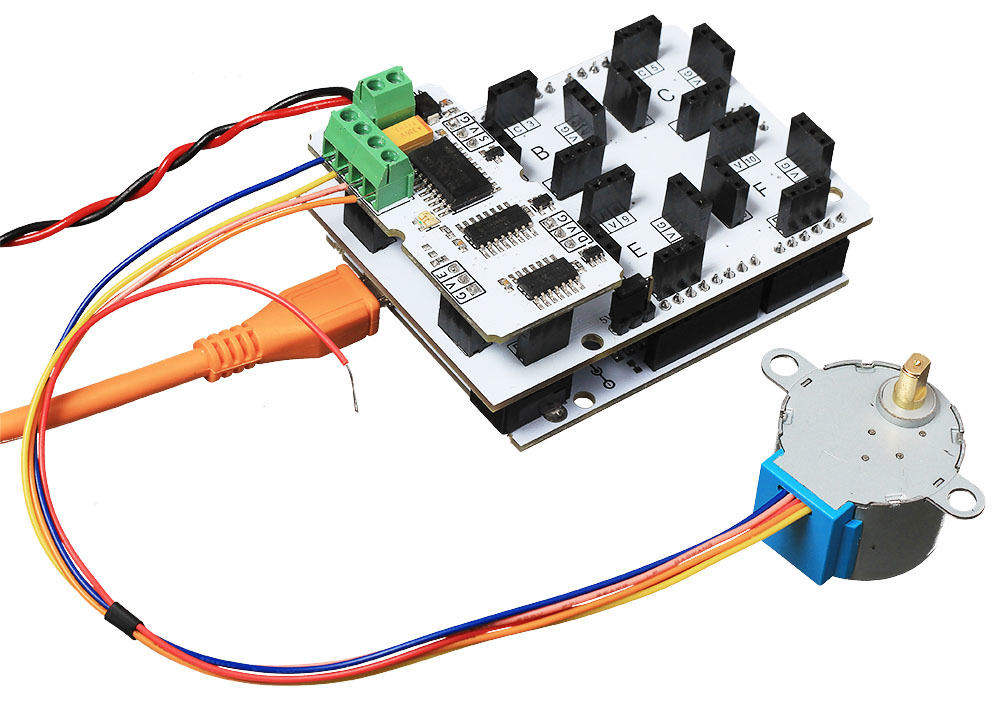
1 из 1 нашел это полезным:
Легко использовать
от Dan199 проверенный покупатель
Это так просто в использовании. В примере кода с веб-сайта очень просто показано, как использовать этот драйвер. Становится очень тепло. Но если вы используете спящий режим, когда двигатель не должен быть включен, плата драйвера успеет слишком остыть.
1 из 1 нашел это полезным:
Работает, но чип горячий
Джон13 проверенный покупатель
Работает отлично, но чип греется при токе 0,5 ампера. Вероятно, это не проблема, но я купил более крупную и немного более дорогую версию (2 ампера), и она работает без заметного нагрева чипа.
Я мог бы добавить, что я не использовал какой-либо связанный код ни для большой, ни для маленькой версии. Я не вижу очевидной необходимости менять параметры микрошага на лету (кроме, может быть, для тестирования), поэтому я жестко подключил их и просто использовал элементы управления направлением и шагом. Я управляю направлением выхода порта и шагаю от счетчика, который автоматически переключает выходной контакт при достижении выбранного значения. (Обратите внимание, что это за пределами стандартного ввода-вывода Audrino, но в долгосрочной перспективе это намного проще. Я предлагаю всем хотя бы взглянуть на руководство Atmel для микросхемы Arduino и попробовать использовать некоторые регистры напрямую.)
Вероятно, это не проблема, но я купил более крупную и немного более дорогую версию (2 ампера), и она работает без заметного нагрева чипа.
Я мог бы добавить, что я не использовал какой-либо связанный код ни для большой, ни для маленькой версии. Я не вижу очевидной необходимости менять параметры микрошага на лету (кроме, может быть, для тестирования), поэтому я жестко подключил их и просто использовал элементы управления направлением и шагом. Я управляю направлением выхода порта и шагаю от счетчика, который автоматически переключает выходной контакт при достижении выбранного значения. (Обратите внимание, что это за пределами стандартного ввода-вывода Audrino, но в долгосрочной перспективе это намного проще. Я предлагаю всем хотя бы взглянуть на руководство Atmel для микросхемы Arduino и попробовать использовать некоторые регистры напрямую.)
1 из 4 нашел это полезным:
Не так здорово, как я надеялся
от участника #678454 проверенный покупатель
Имея в виду, что я новичок в использовании Arduino и сопутствующих продуктов, я действительно разочарован качеством кодирования, которое я нашел на этой плате. Кажется, что все в восторге от него, поэтому покупка была закономерным решением. К сожалению, я чувствую, что вернулся в Commodore 64 дня, загружая тонны кода только для того, чтобы обнаружить, что они не работают. Поэтому я трачу часы на то, чтобы ничего не пропустить и не добавить. И вообще у меня нет. Итак, я заканчиваю тем, что пытаюсь выяснить, что было непреднамеренно добавлено или опущено автором. Затем я начинаю просматривать другие коды и вставлять части того, что, по моему мнению, сработало в новый код, только чтобы обнаружить, что они также несовместимы. Эта доска не исключение. Я уверен, что это, вероятно, такой же хороший продукт, как и другие, но лично я пока не являюсь его большим поклонником. Кстати, у меня тоже есть Seeed Motor Shield и Adafruit Motor Shield V2.0 и у меня точно такие же чувства к ним.
Кажется, что все в восторге от него, поэтому покупка была закономерным решением. К сожалению, я чувствую, что вернулся в Commodore 64 дня, загружая тонны кода только для того, чтобы обнаружить, что они не работают. Поэтому я трачу часы на то, чтобы ничего не пропустить и не добавить. И вообще у меня нет. Итак, я заканчиваю тем, что пытаюсь выяснить, что было непреднамеренно добавлено или опущено автором. Затем я начинаю просматривать другие коды и вставлять части того, что, по моему мнению, сработало в новый код, только чтобы обнаружить, что они также несовместимы. Эта доска не исключение. Я уверен, что это, вероятно, такой же хороший продукт, как и другие, но лично я пока не являюсь его большим поклонником. Кстати, у меня тоже есть Seeed Motor Shield и Adafruit Motor Shield V2.0 и у меня точно такие же чувства к ним.
Отлично, просто, но нужна настроенная библиотека arduino
от участника #422113 проверенный покупатель
Это отличный способ управления шаговым двигателем. Но… Библиотеки шаговых двигателей Arduino отлично подходят для управления подключением к 4-проводному драйверу. Некоторые из них, я уверен, разобрались с задержками, чтобы они не влияли на синхронизацию остальной части вашего кода.
Простой шаговый драйвер был бы намного мощнее, если бы библиотека arduino была настроена (для простых людей, таких как я :), особенно если бы также были включены время ускорения и замедления. Мне трудно писать код без использования задержки в моем проекте. Может я просто не такой умный 🙂
Но… Библиотеки шаговых двигателей Arduino отлично подходят для управления подключением к 4-проводному драйверу. Некоторые из них, я уверен, разобрались с задержками, чтобы они не влияли на синхронизацию остальной части вашего кода.
Простой шаговый драйвер был бы намного мощнее, если бы библиотека arduino была настроена (для простых людей, таких как я :), особенно если бы также были включены время ускорения и замедления. Мне трудно писать код без использования задержки в моем проекте. Может я просто не такой умный 🙂
Тек.
еще не знаю
от участника #812198 проверенный покупатель
Было бы неплохо, если бы Вы предложили к продаже необходимые клеммные колодки, необходимые для купленных плат.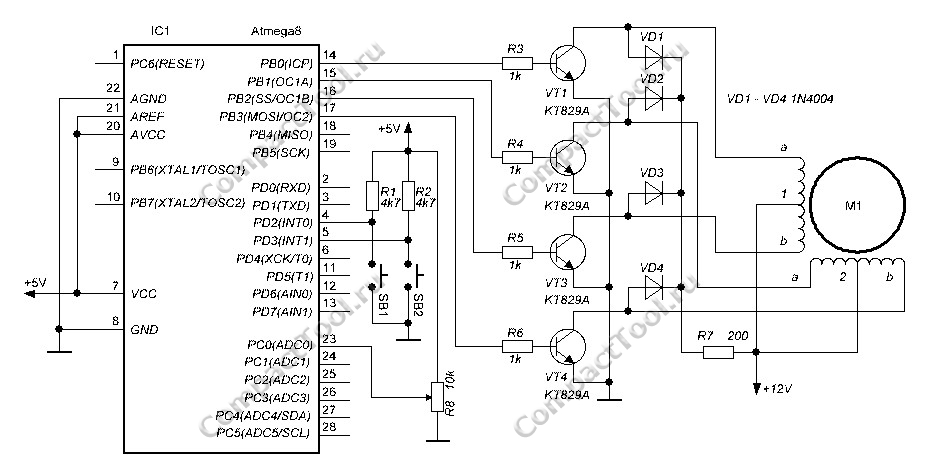
Спасибо
Облегчает жизнь
от пользователя #322613 проверенный покупатель
Подключить его к микроконтроллеру очень просто, а изменить логику на 3.3 вместо 5 просто. В то время как чип может работать быстрее, мой шаговый двигатель не может, поэтому я убедился, что он не пропускает обязательные пробы и ошибки, пока не нашел минимальную задержку, которую может достичь комбинация контроллера и двигателя. Если вы спешите просто заставить все работать (как я), это действительно отличный простой драйвер. Обязательно найдите время, чтобы отрегулировать ограничение тока для вашего двигателя с помощью контрольной точки, прежде чем подключать двигатель — в руководстве есть формула отношения напряжения к току. Для низкой стоимости это очень удобно.
Для низкой стоимости это очень удобно.
Работал отлично!
от участника #866144 проверенный покупатель
Работал точно так, как должен был
от участника #865449 проверенный покупатель
Я использую его для привода всех своих акриловых часов-скелетонов. Это надежно и доступно 24/7…
работает отлично
от пользователя #884667 проверенный покупатель
прекрасно работает при правильном использовании.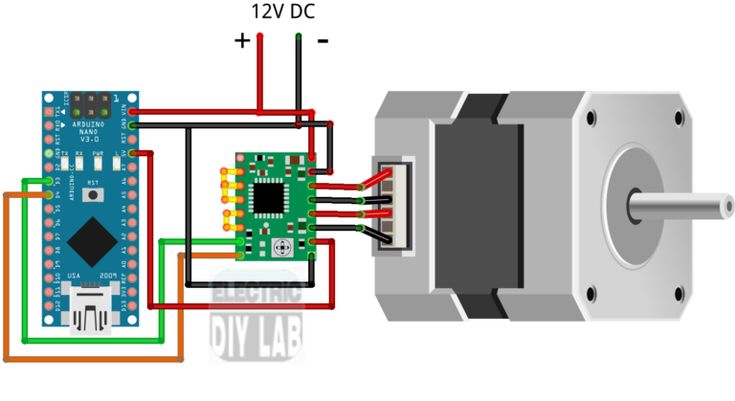 .. Легко взорвется, если использовать его неправильно, ха-ха
.. Легко взорвется, если использовать его неправильно, ха-ха
Отличный водитель
от участника #408903 проверенный покупатель
Работает так, как рекламируется, прост в использовании, просто следуйте инструкциям на веб-странице продукта. Обязательно прислушайтесь к их примечанию с просьбой не подключать / отключать двигатель, когда драйвер включен; это убьет ваш EasyDriver, так что не делайте этого! Я неплотно подключил свой двигатель к плате, и во время тестирования он оторвался, и мой драйвер умер; к счастью, я купил две платы, ожидая, что сожгу первую, поэтому я убедился, что во второй раз припаял правильные клеммы к драйверу, и теперь все работает безупречно.
Отличный, доступный вариант
от участника № 588721 проверенный покупатель
Я новичок в использовании драйверов шаговых двигателей и собирал собственную схему. Он больше, чем большинство других драйверов, но это здорово, когда я пытаюсь научиться использовать драйвер, и мне не нужно, чтобы он напрямую взаимодействовал с чем-либо еще.
Раньше я был разочарован, и после того, как я заказал их, я мог с радостью перейти к следующим шагам в моем проекте. Четкая документация и маркировка, сделанные с их помощью.
Вроде работает хорошо, но чип сильно греется
ГарднерТек проверенный покупатель
Плата хорошо работает и легко программируется. Я заметил, что делать маленькие шаги или всего несколько полных оборотов — это нормально. После полных оборотов и почти высокой скорости чип сильно нагревается, и двигатель начинает работать рывками. Вероятно, это решит радиатор. Кто-нибудь сталкивался с этим и порекомендовал конкретный радиатор?
Я заметил, что делать маленькие шаги или всего несколько полных оборотов — это нормально. После полных оборотов и почти высокой скорости чип сильно нагревается, и двигатель начинает работать рывками. Вероятно, это решит радиатор. Кто-нибудь сталкивался с этим и порекомендовал конкретный радиатор?
Отличная доска
от Бокочоко проверенный покупатель
Мне нравится эта доска. Это намного проще, чем я думал. Моим единственным изменением будет перемещение всех контактов в одну сторону, чтобы упростить подключение.
Отличное устройство, отличное руководство по подключению
от участника #836901 проверенный покупатель
Очень прост в использовании, следуя инструкциям Sparkfun по подключению.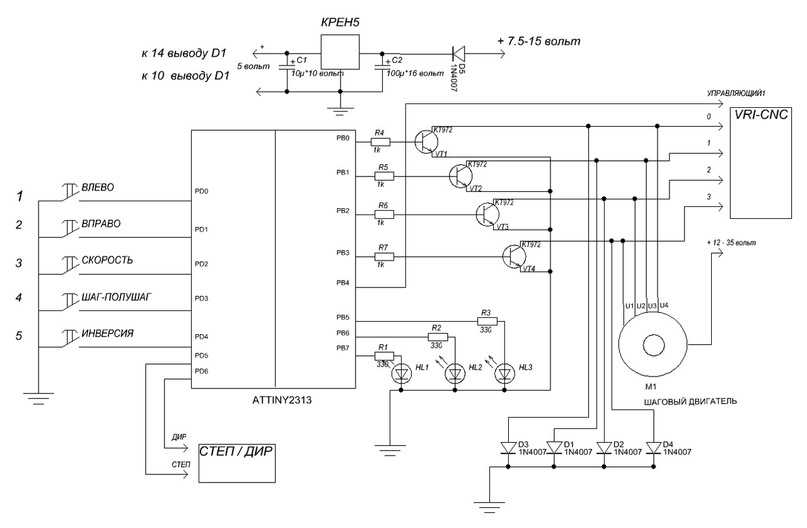 Работает как обещал. Я читал комментарии о количестве тепла, которое он выделяет, но я не видел никаких проблем в этом отношении. EasyDriver — это простая покупка для вашего шагового двигателя.
Работает как обещал. Я читал комментарии о количестве тепла, которое он выделяет, но я не видел никаких проблем в этом отношении. EasyDriver — это простая покупка для вашего шагового двигателя.
отличный для своего размера
от участника #1070410 проверенный покупатель
первоклассный продукт за опыт, который у меня есть и который я приобретаю с каждым проектом, который я делаю настоятельно рекомендуется
Хорошо работает в моем проекте
от участника № 166004 проверенный покупатель
Он может выполнять 4000 шагов в секунду, управляемый Arduino Pro Mini с частотой 16 МГц. Вполне нормально. Он надежен, но я всегда выключаю мотор после того, как сделаю 6000 шагов или меньше. Если вы оставите его включенным, через него непрерывно будет течь полный запрограммированный ток, и он станет очень, очень горячим. Горячо обожгите палец. Я бы порекомендовал радиатор, если вы собираетесь оставить двигатель включенным (например, при микрошаге).
Вполне нормально. Он надежен, но я всегда выключаю мотор после того, как сделаю 6000 шагов или меньше. Если вы оставите его включенным, через него непрерывно будет течь полный запрограммированный ток, и он станет очень, очень горячим. Горячо обожгите палец. Я бы порекомендовал радиатор, если вы собираетесь оставить двигатель включенным (например, при микрошаге).
Поскольку модуль стоит дорого, я провел все свои испытания с подделками и поджарил два из них, а затем добавил этот модуль в готовый продукт для надежности. Я настоятельно рекомендую этот драйвер для небольших двигателей.
пока работает нормально
от пользователя #1251513 проверенный покупатель
Мне не удалось протестировать его с правильным типом шагового двигателя.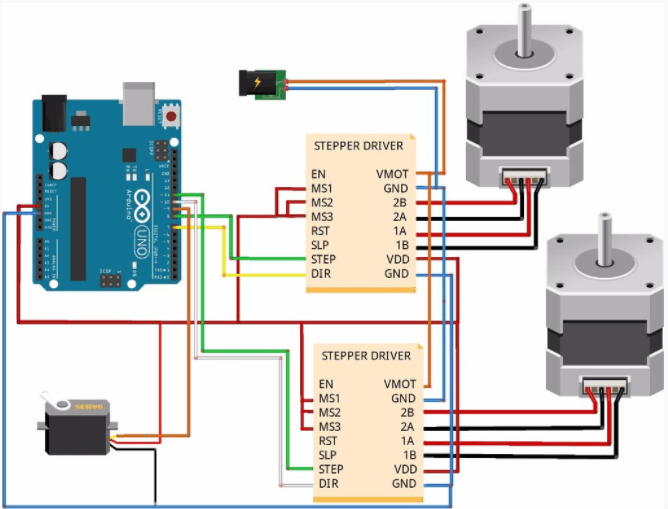 Тот, что у меня сейчас, берет около 2 А, а столько драйвер выдать не может. Моторчик крутится, но не на той скорости, которая мне нужна. Лучший мотор уже в пути, проблем не ожидаю, как только он прибудет.
Кстати, он очень прост в использовании!
Тот, что у меня сейчас, берет около 2 А, а столько драйвер выдать не может. Моторчик крутится, но не на той скорости, которая мне нужна. Лучший мотор уже в пути, проблем не ожидаю, как только он прибудет.
Кстати, он очень прост в использовании!
работает как рекламируется
от пользователя № 736210 проверенный покупатель
Это устройство работало, как заявлено. В конце концов я перешел на Big Easy Driver, потому что мне нужно было больше тока.
EasyDriver — это удобный шаговый контроллер!
от пользователя #625063 проверенный покупатель
Я использовал PIC16F18855 для сопряжения и анализа нескольких датчиков в научных целях.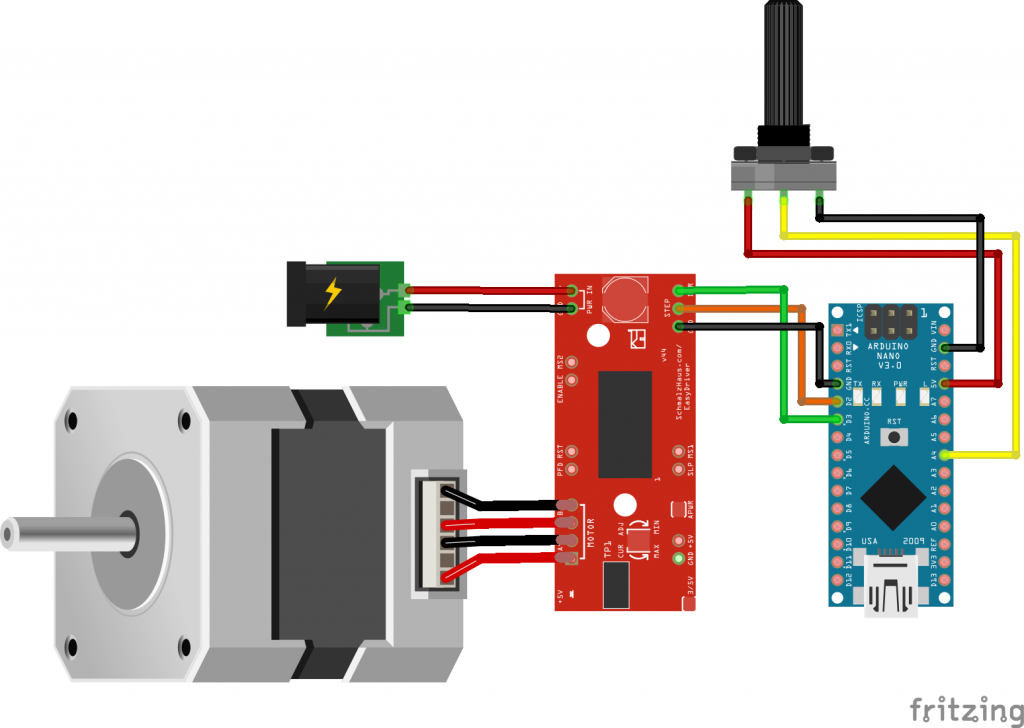 На позднем этапе разработки прототипа стала очевидной необходимость в стадии точного перемещения с шаговым управлением. Из-за нехватки времени, ресурсов процессора и места на печатной плате я решил попробовать EasyDriver. Реализация шагового двигателя и прошивка были выполнены всего за 30 минут благодаря ясной, точной и серьезной документации, которая окружает функциональность платы. С помощью нескольких модификаций я смог еще больше уменьшить размер платы, подключив выходной регулятор EasyDriver +5/3,3 В для питания большинства приложений. Если вам нужен надежный гибкий шаговый контроллер, но вы предпочитаете тратить свое время на другие аспекты вашего приложения, EasyDriver вам поможет!
На позднем этапе разработки прототипа стала очевидной необходимость в стадии точного перемещения с шаговым управлением. Из-за нехватки времени, ресурсов процессора и места на печатной плате я решил попробовать EasyDriver. Реализация шагового двигателя и прошивка были выполнены всего за 30 минут благодаря ясной, точной и серьезной документации, которая окружает функциональность платы. С помощью нескольких модификаций я смог еще больше уменьшить размер платы, подключив выходной регулятор EasyDriver +5/3,3 В для питания большинства приложений. Если вам нужен надежный гибкий шаговый контроллер, но вы предпочитаете тратить свое время на другие аспекты вашего приложения, EasyDriver вам поможет!
Работает супер хорошо.
от пользователя #837686 проверенный покупатель
Я худший программист в мире, но даже я понял это, и мне это нравится.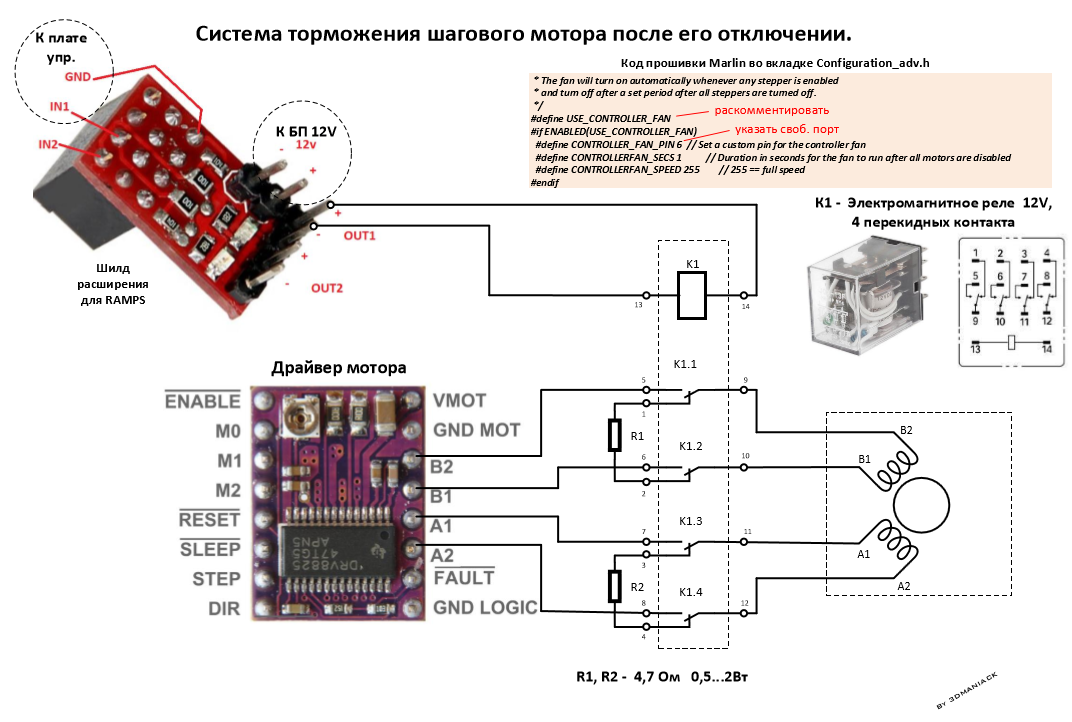 Спасибо!
Бретт Р
Спасибо!
Бретт Р
Подключи и играй
от участника № 1282770 проверенный покупатель
Документация была достаточно подробной, чтобы я мог написать простой скрипт на Python для моей платы Asus tinker, встроенный режим 3,3 В сделал все просто и ясно, расположение выводов имело смысл, а маскировка на плате была сделана хорошо. Как и все доски от sparkfun, она очень хорошо сделана.
0 из 1 нашел это полезным:
ВНИМАНИЕ: Нет защиты от обратной полярности.
от участника № 1331550 проверенный покупатель
Только осторожно с ним, один косяк с проводом или пайкой на входе питания на плате и готово.
Всего четыре звезды, но не по вине водителя!
от участника № 1374590 проверенный покупатель
У меня было очень простое временное приложение для вращения одного двигателя с помощью генератора функций. Это работало без каких-либо проблем, но я вряд ли потребую больше от этой платы на данный момент. Я не могу дать ему пять звезд (пока), потому что я едва протестировал его.
Разные продукты для разных людей?
от участника #1493724 проверенный покупатель
Соавтор прислал нам ссылку, по которой он купил легкий драйвер.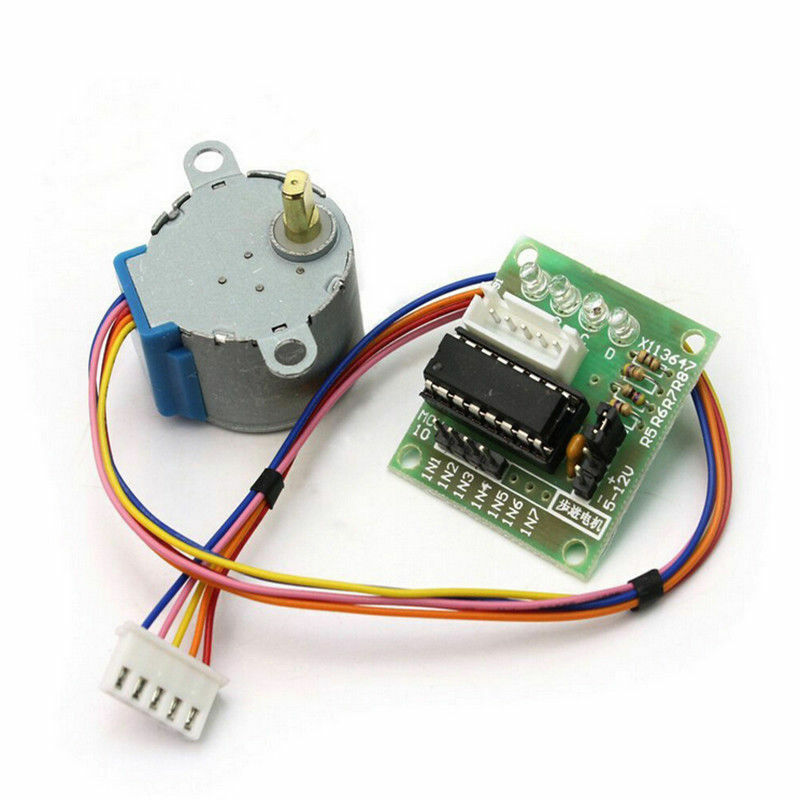 Нам сообщили, что штифты пришли припаянные, заказали такой же товар. Принимая во внимание, что когда мы заказывали, в комплекте не было штифтов или припаяных. Я общался со службой поддержки, и они сказали, что не продают ничего с припаянными контактами, кроме одного другого продукта. За 22,9 доллара0, включая доставку, они должны быть запаяны и готовы к использованию.
Нам сообщили, что штифты пришли припаянные, заказали такой же товар. Принимая во внимание, что когда мы заказывали, в комплекте не было штифтов или припаяных. Я общался со службой поддержки, и они сказали, что не продают ничего с припаянными контактами, кроме одного другого продукта. За 22,9 доллара0, включая доставку, они должны быть запаяны и готовы к использованию.
3D печатная насыпь для доски
от участника № 1340323 проверенный покупатель
Плата 21 х 49 х 7,6 мм. Крепежные отверстия имеют диаметр 3,3 мм. Перейдите на thingiverse, если вы хотите выбрать одно из нескольких доступных средств передвижения. Мне понравилось https://www.thingiverse.com/thing:3477410
Отличный шаговый драйвер
Кшоматик проверенный покупатель
Простота использования
Хорошо, но будьте осторожны
от пользователя № 1623255 проверенный покупатель
Этот продукт работает так, как описано, однако НЕ отключайте шаговый двигатель, пока на плату и шаговый двигатель подается питание! Это поджарит чип, потому что нет встроенной защиты от обратной ЭДС. Я научился этому на собственном горьком опыте. Это также может быть потенциальной проблемой, если двигатель глохнет, но я не проверял это.
Я научился этому на собственном горьком опыте. Это также может быть потенциальной проблемой, если двигатель глохнет, но я не проверял это.
Соответствует своему названию — прост в сборке и эксплуатации
от участника #732101 проверенный покупатель
Силовые линии и линии управления просты в использовании. Мне не нужно ничего знать о шаговых двигателях, чтобы их использовать.
Единственным незначительным изменением является то, что я переместил регуляторы скорости двигателя MS1 и MS2 вместе на плату для облегчения подключения.
Быстро и просто
от участника #722773 проверенный покупатель
Нашел учебник для черного бигльбона, и он заработал в тот же день. С кодом. Хорошо задокументировано и прямолинейно
С кодом. Хорошо задокументировано и прямолинейно
Облегчает работу
от пользователя № 756647 проверенный покупатель
Мне понадобился микрошаг 1/8 для точного управления настроечным конденсатором в небольшой антенне с магнитной рамкой — Easy Driver сделал эту работу очень легкой.
Мне нравится этот Драйвер.
от JB_Remote проверенный покупатель
Работал, как рекламируется !! Много вариантов, так что приятно иметь под рукой, поэтому, когда мне нужно собрать проект, это хороший выбор. Я взорвал один, но он был таким дешевым, что заменить его было проще, чем починить.
Я взорвал один, но он был таким дешевым, что заменить его было проще, чем починить.
Работает
от пользователя #647838 проверенный покупатель
Он делает то, что написано на банке. Однако эта центральная микросхема сильно нагревается. Я еще не выключал его (пока), но я бы рекомендовал переводить его в спящий режим, когда это возможно.
Большой
от пользователя #801638 проверенный покупатель
Отличный инструмент.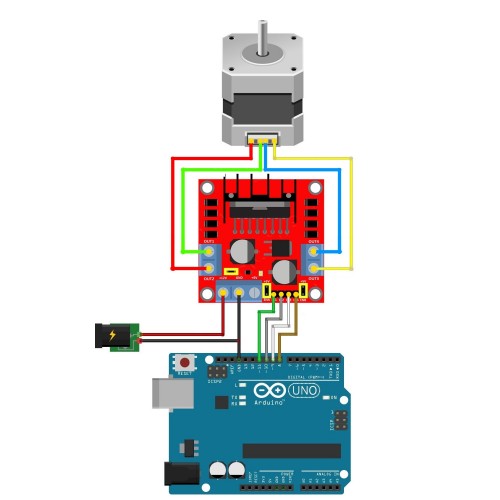 Получил хорошую оценку за свой проект.
Получил хорошую оценку за свой проект.
: пошаговое руководство | Передовой промышленный стандарт
18 декабря 2018 г. | Блог | 1 комментарий
Что такое драйвер шагового двигателя?Драйвер шагового двигателя — это схема драйвера, которая позволяет шаговому двигателю работать так, как он работает. Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. Благодаря этому 9Шаговые двигатели 0247 считаются более совершенными, чем обычные двигатели постоянного тока.
Несмотря на то, что система может показаться сверхсложной, ее можно построить с помощью нескольких транзисторов. Организовав их функции включения и выключения надлежащим образом, система способна обеспечить достаточную мощность фаз, а двигатель может выполнять этот процесс поэтапно. Униполярный драйвер можно сделать в рамках приличного бюджета. Важно помнить, что этот драйвер сможет питать только униполярные двигатели. Если вы хотите подключить биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе возвращать ток на ступени. Их изготовление может оказаться более сложным, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Если вы хотите подключить биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе возвращать ток на ступени. Их изготовление может оказаться более сложным, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Драйверы шаговых двигателей полагаются на входные данные из отдельного источника для функционирования и создания выходных данных.
Следующие четыре сигнала управляют двигателем:
- ЧАСЫ: Тактовый сигнал дает команду шага.
- СБРОС: Устанавливает сигналы конечного уровня в заданное начальное положение.
- НАПРАВЛЕНИЕ: определяет направление вращения оси двигателя.
- ПОЛУШАГ/ПОЛНЫЙ: Определяет, работать ли в полном или полушаге.
Дешевый способ питания простого шагового двигателя — через микроконтроллер. Этого достаточно, поскольку этим драйверам для работы требуется всего пара сигналов. Первый сигнал шага, а второй сигнал направления.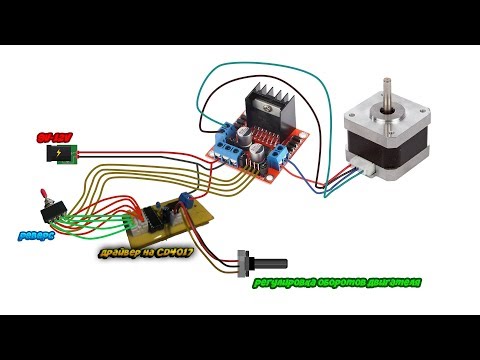 Последний, при высоком логическом уровне +5 В, сообщает двигателю направление работы. Когда сигнал низкий (GND), он движется в противоположном направлении.
Последний, при высоком логическом уровне +5 В, сообщает двигателю направление работы. Когда сигнал низкий (GND), он движется в противоположном направлении.
Полный шаг обычно требует два прямоугольных сигнала в квадратуре . В зависимости от ведущей фазы ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки. Вращение пропорционально тактовой частоте, которая управляет импульсом на линии. Это GND и +5V, о которых упоминалось ранее. Таким образом, в зависимости от DIP-переключателей настройки разрешения шага, двигатель будет переходить от одного положения шага к другому. Например, если он установлен в полношаговый режим, будет сделан полный шаг, и половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертьшага и так далее.
Из-за инерции вы должны увеличивать и уменьшать импульсы, чтобы синхронизироваться с магнитным полем. В противном случае двигатель может заглохнуть. Рампа также должна быть плавной и практически не двигаться, чтобы двигатель не заглох.
Рампа также должна быть плавной и практически не двигаться, чтобы двигатель не заглох.
Крайне важно, чтобы драйвер соответствовал правильному двигателю . Если все сделано неправильно, производительность двигателя будет недостаточной, или он может даже повредить одну часть или обе.
При поиске подходящих двигателей и драйверов обязательно учитывайте ограничения по напряжению и максимальный ток, который может обеспечить драйвер. Обязательно учитывайте «непрерывный» номинальный ток, а не «пиковый» номинальный ток, поскольку они не применимы к шаговым двигателям. Что касается двигателя, убедитесь, что он может принимать ампер на фазу и сопротивление на фазу, которые обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Часто указывается напряжение, но не всегда. Вы можете использовать закон Ома , чтобы рассчитать его и убедиться, что ваш процесс дает продуктивные результаты.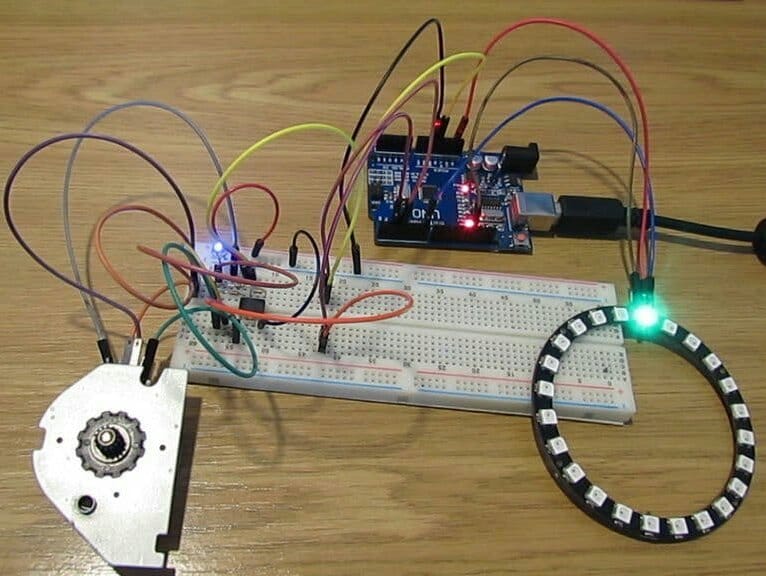 Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не указано, квадратный корень из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение питания.
Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не указано, квадратный корень из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение питания.
Это показано ниже.
Например, если в технических характеристиках двигателя указано, что номинальное напряжение составляет 3 В (3 В * 20 = 60 В), можно безопасно управлять двигателем с драйвером с максимальным рабочим напряжением 60 В.
Пример 2, если в характеристиках двигателя указано, что фазный ток и сопротивление составляют 5 А и 0,6 Ом, (5 А * 0,6 Ом = 3 В * 20 = 60 В).
Пример 3, если в характеристиках двигателя указано, что индуктивность/фаза составляет 2,5 мГн ((√2,5) * 32 = 50,6 В), можно безопасно использовать двигатель с рабочим драйвером на 50 В. Реализация значения индуктивности фаз дает консервативное номинальное напряжение, поскольку это очень точный расчет максимального напряжения питания .