Электротехника
Электротехника
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ ГЛАВА I. ЛИНЕЙНЫЕ ЦЕПИ ПЕРЕМЕННОГО ТОКА 1. ОДНОФАЗНЫЕ ЦЕПИ § 1.2. ПРИНЦИП ПОЛУЧЕНИЯ ПЕРЕМЕННОЙ СИНУСОИДАЛЬНОЙ ЭДС § 1.3. ДЕЙСТВУЮЩИЕ ЗНАЧЕНИЯ ТОКА И НАПРЯЖЕНИЯ § 1.4. СРЕДНЕЕ ЗНАЧЕНИЕ ПЕРЕМЕННОГО ТОКА  5. МЕТОД ВЕКТОРНЫХ ДИАГРАММ 5. МЕТОД ВЕКТОРНЫХ ДИАГРАММ§ 1.6. СОПРОТИВЛЕНИЯ В ЦЕПЯХ ПЕРЕМЕННОГО ТОКА § 1.7. ЦЕПЬ ПЕРЕМЕННОГО ТОКА С АКТИВНЫМ СОПРОТИВЛЕНИЕМ § 1.8. ЦЕПЬ ПЕРЕМЕННОГО ТОКА С ИНДУКТИВНОСТЬЮ § 1.9. ЦЕПЬ ПЕРЕМЕННОГО ТОКА С АКТИВНО-ИНДУКТИВНОЙ НАГРУЗКОЙ § 1.10. ЦЕПЬ ПЕРЕМЕННОГО ТОКА С ЕМКОСТЬЮ § 1.11. ЦЕПЬ ПЕРЕМЕННОГО ТОКА С АКТИВНО-ЕМКОСТНОЙ НАГРУЗКОЙ § 1.12. ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ R, L И С. КОЭФФИЦИЕНТ МОЩНОСТИ § 1.13. РЕЗОНАНС НАПРЯЖЕНИЙ § 1.14. РЕЗОНАНС ТОКОВ § 1.15. СПОСОБЫ ПОВЫШЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ § 1.16. ПРОВОДИМОСТЬ И РАСЧЕТ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ § 1.17. СИМВОЛИЧЕСКИЙ МЕТОД 2. ТРЕХФАЗНЫЕ ЦЕПИ § 1.19. ПРИНЦИП ПОСТРОЕНИЯ ТРЕХФАЗНОЙ СИСТЕМЫ § 1.21. СОЕДИНЕНИЕ ТРЕУГОЛЬНИКОМ § 1.22. МОЩНОСТЬ ТРЕХФАЗНОЙ СИСТЕМЫ ГЛАВА II. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ И ПРИБОРЫ § 2.3. ПОГРЕШНОСТИ ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИЙ § 2.4. ОСНОВНЫЕ ДЕТАЛИ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ § 2.5. МАГНИТОЭЛЕКТРИЧЕСКИЕ ПРИБОРЫ § 2.  6. ЭЛЕКТРОМАГНИТНЫЕ ПРИБОРЫ 6. ЭЛЕКТРОМАГНИТНЫЕ ПРИБОРЫ§ 2.7. ЭЛЕКТРОДИНАМИЧЕСКИЕ ПРИБОРЫ § 2.8. ФЕРРОДИНАМИЧЕСКИЕ ПРИБОРЫ § 2.9. ЭЛЕКТРОДИНАМИЧЕСКИЕ ВАТТМЕТРЫ § 2.10. ОДНОФАЗНЫЙ ФАЗОМЕТР § 2.11. ОДНОФАЗНЫЙ ИНДУКЦИОННЫЙ СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ § 2.12. ОММЕТРЫ § 2.13. ЛОГОМЕТРЫ § 2.14. ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРИБОРЫ § 2.16. ШКОЛЬНЫЕ ДЕМОНСТРАЦИОННЫЕ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ § 2.17. ПОНЯТИЕ О ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРАХ § 2.18. ИЗМЕРЕНИЕ МОЩНОСТИ ТРЕХФАЗНОЙ СИСТЕМЫ § 2.19. ИЗМЕРЕНИЕ ЭНЕРГИИ ТРЕХФАЗНОЙ СИСТЕМЫ § 2.20. СПОСОБЫ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ § 2.21. ПОНЯТИЕ ОБ ИЗМЕРЕНИЯХ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН ЭЛЕКТРИЧЕСКИМИ МЕТОДАМИ ГЛАВА III. ТРАНСФОРМАТОРЫ § 3.2. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ ТРАНСФОРМАТОРА § 3.3. ХОЛОСТОЙ РЕЖИМ РАБОТЫ ТРАНСФОРМАТОРА § 3.4. РАБОЧИЙ РЕЖИМ ТРАНСФОРМАТОРА § 3.5. КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ТРАНСФОРМАТОРА § 3.6. ТРЕХФАЗНЫЕ ТРАНСФОРМАТОРЫ § 3.7. КОНСТРУКЦИИ ТРАНСФОРМАТОРОВ  8. АВТОТРАНСФОРМАТОР 8. АВТОТРАНСФОРМАТОР§ 3.9. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ Глава IV. НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ. ВЫПРЯМИТЕЛИ 4.1. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И ЭЛЕМЕНТОВ § 4.2. ПОЛУПРОВОДНИКОВЫЕ ДИОДЫ § 4.3. ТИРИСТОРЫ § 4.4. ОСНОВНЫЕ СХЕМЫ ВЫПРЯМЛЕНИЯ ПЕРЕМЕННОГО ТОКА § 4.5. ПРИМЕНЕНИЕ ТИРИСТОРОВ ДЛЯ ВЫПРЯМЛЕНИЯ И РЕГУЛИРОВАНИЯ ТОКА § 4.6. СГЛАЖИВАЮЩИЕ ФИЛЬТРЫ § 4.7. ПОНЯТИЕ ОБ ИНВЕРТОРАХ § 4.8. ФЕРРОРЕЗОНАНС В НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ § 4.9. ФЕРРОРЕЗОНАНСНЫЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ § 4.10. ШКОЛЬНЫЕ ВЫПРЯМИТЕЛИ ГЛАВА V. МАШИНЫ ПЕРЕМЕННОГО ТОКА § 5.2. ПРИНЦИП РАБОТЫ И УСТРОЙСТВО АСИНХРОННОГО ДВИГАТЕЛЯ § 5.3. СОЗДАНИЕ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ ТРЕХФАЗНОЙ СИСТЕМОЙ § 5.4. СКОРОСТЬ ВРАЩЕНИЯ МАГНИТНОГО ПОЛЯ. ТИПЫ ОБМОТОК СТАТОРА § 5.5. СКОЛЬЖЕНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ § 1.6. МАГНИТНЫЙ ПОТОК ЭДС И ТОКИ АСИНХРОННОГО ДВИГАТЕЛЯ § 5.7. ВЕКТОРНАЯ ДИАГРАММА АСИНХРОННОГО ДВИГАТЕЛЯ § 5.  8. АСИНХРОННЫЙ ДВИГАТЕЛЬ С КОНТАКТНЫМИ КОЛЬЦАМИ 8. АСИНХРОННЫЙ ДВИГАТЕЛЬ С КОНТАКТНЫМИ КОЛЬЦАМИ§ 5.9. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ § 5.10. ПУСК В ХОД АСИНХРОННЫХ ДВИГАТЕЛЕЙ § 5.11. РЕВЕРСИРОВАНИЕ И РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ § 5.13. ПРИМЕНЕНИЕ ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ § 5.14. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ СИНХРОННОГО ГЕНЕРАТОРА § 5.15. ЭДС СИНХРОННОГО ГЕНЕРАТОРА § 5.16. РЕАКЦИЯ ЯКОРЯ § 5.17. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИНХРОННОГО ГЕНЕРАТОРА § 5.18. УПРОЩЕННАЯ ВЕКТОРНАЯ ДИАГРАММА СИНХРОННОГО ГЕНЕРАТОРА § 5.19. РАБОТА СИНХРОННОГО ГЕНЕРАТОРА ПАРАЛЛЕЛЬНО С СЕТЬЮ § 5.20. ОБРАТИМОСТЬ СИНХРОННЫХ МАШИН. ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ § 5.21. ПУСК И ОСТАНОВКА СИНХРОННОГО ДВИГАТЕЛЯ § 5.22. ВЛИЯНИЕ ТОКА ВОЗБУЖДЕНИЯ НА РАБОТУ СИНХРОННОГО ДВИГАТЕЛЯ. СИНХРОННЫЙ КОМПЕНСАТОР § 5.23. РЕАКТИВНЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ § 5.24. ПРИМЕНЕНИЕ СИНХРОННЫХ ДВИГАТЕЛЕЙ § 6.  2. ПРИНЦИП РАБОТЫ И УСТРОЙСТВО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА. ТИПЫ ОБМОТОК ЯКОРЯ 2. ПРИНЦИП РАБОТЫ И УСТРОЙСТВО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА. ТИПЫ ОБМОТОК ЯКОРЯ§ 6.3. ЭДС И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА § 6.4. РЕАКЦИЯ ЯКОРЯ § 6.5. КОММУТАЦИЯ § 6.6. СПОСОБЫ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА § 6.7. ОБРАТИМОСТЬ МАШИН ПОСТОЯННОГО ТОКА. ДВИГАТЕЛИ § 6.8. ДВИГАТЕЛЬ ПАРАЛЛЕЛЬНОГО И НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ § 6.9. ДВИГАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ § 6.10. ДВИГАТЕЛЬ СМЕШАННОГО ВОЗБУЖДЕНИЯ § 6.11. КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА § 7.2. РЕЛЕ § 7.3. ДАТЧИКИ § 7.4. АВТОМАТИЧЕСКИЙ КОНТРОЛЬ § 7.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ § 7.6. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ § 7.7. ТЕЛЕМЕХАНИКА § 7.8. КОМПЛЕКСНАЯ АВТОМАТИЗАЦИЯ ГЛАВА VIII. ПРОИЗВОДСТВО, ПЕРЕДАЧА И ИСПОЛЬЗОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В НАРОДНОМ ХОЗЯЙСТВЕ § 8.1. ЭЛЕКТРИЧЕСКИЕ СТАНЦИИ § 8.2. ЭНЕРГЕТИЧЕСКИЕ СИСТЕМЫ § 8.3. ПЕРЕДАЧА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПОСТОЯННЫМ ТОКОМ § 8.4. АВТОМАТИЗАЦИЯ ЭЛЕКТРИЧЕСКИХ СТАНЦИЙ И ПОДСТАНЦИЙ ГЛАВА IX.  СОВРЕМЕННЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ ЭЛЕКТРОЭНЕРГЕТИКИ СОВРЕМЕННЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ ЭЛЕКТРОЭНЕРГЕТИКИ§ 10.1. ОПАСНОСТЬ ПОРАЖЕНИЯ ЭЛЕКТРИЧЕСКИМ ТОКОМ ДЛЯ ОРГАНИЗМА ЧЕЛОВЕКА § 10.2. ЭЛЕКТРИЧЕСКОЕ СОПРОТИВЛЕНИЕ ТЕЛА ЧЕЛОВЕКА § 10.3. ОСНОВНЫЕ ПРИЧИНЫ ПОРАЖЕНИЯ ЭЛЕКТРИЧЕСКИМ ТОКОМ § 10.4. ЗАЩИТНОЕ ЗАЗЕМЛЕНИЕ И ЗАЗЕМЛЕНИЕ НА НЕЙТРАЛЬ (ЗАНУЛЕНИЕ) § 10.5. ЗАЩИТНЫЕ СРЕДСТВА И КОНТРОЛЬ СОСТОЯНИЯ ИЗОЛЯЦИИ ЭЛЕКТРОУСТАНОВОК § 10.6. ОКАЗАНИЕ ПЕРВОЙ ПОМОЩИ ПОРАЖЕННОМУ ЭЛЕКТРИЧЕСКИМ ТОКОМ § 10.7. ОСНОВНЫЕ ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ В УЧЕБНЫХ ЛАБОРАТОРИЯХ ЛИТЕРАТУРА |
Понятие скольжения асинхронного двигателя
Содержание
- 1 Что представляет собой скольжение асинхронной машины
- 2 Скольжение в разных условиях работы привода
- 3 Как можно измерить показатель S?
Скольжение может изменяться. Это зависит о того, в каком режиме работает электродвигатель, величины напряжения сети и нагрузки на машину. Но что же это за характеристика и от чего она зависит? Разберемся ниже!
Но что же это за характеристика и от чего она зависит? Разберемся ниже!
В целом, принцип, по которому происходит работа трехфазного мотора очень прост. К обмотке статора подают напряжение, питающее движок. Благодаря ему появляется магнитный поток, смещенный на 120 градусов в каждой из трех фаз. А тот поток, который носит имя суммирующего будет еще и вращающимся.
Обмотка якоря – замкнутый контур. В ней появляется электродвижущая сила (ЭДС), а магнитный поток, возникающей не без ее помощи, приводит ротор в работу: он начинает вращаться. Электромагнитный момент всегда будет пытаться сравнять темпы двух полей главных элементов привода: статора и ротора.
Величина, которая определяет разницу между скоростями вращения вышеописанных магнитных полей и есть то самое скольжение. Мы все знаем, что ротор никогда не будет поспевать за статором, значение это никогда не будет больше единицы. Измерение можно проводить как в процентах, так и в относительных величинах.
Чтобы рассчитать величину скольжения (S), нужно знать показатель частоты, с которой вращается магнитное поле (n1) и частоту, с которой вращается магнитное поле в роторе.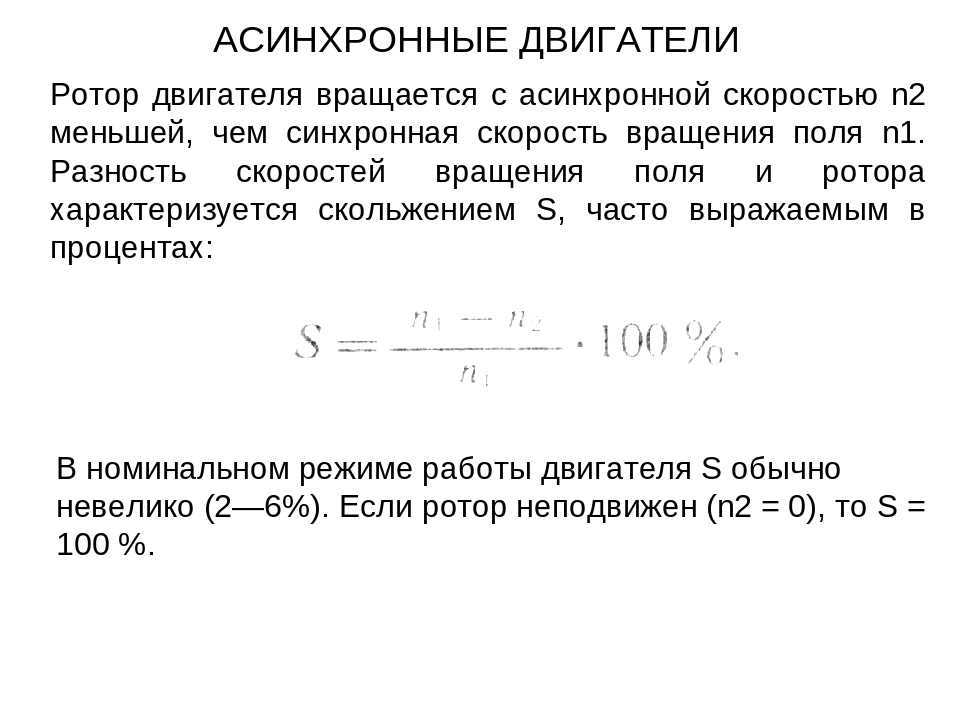 Формула, по которой производится расчет, выглядит так:
Формула, по которой производится расчет, выглядит так:
Скольжение – чрезвычайно важная характеристика мотора. Она описывает то, насколько исправна работа машины.
Если режим работы агрегата – холостой, искомый показатель всегда будет близок к нулевому значению или, по крайней мере, не превысит 3%. Это связано с тем, что n1 будет практически равен n2. Несмотря на то, что значение всегда близко к нулю, нулевым оно быть не может, потому что поля ротора и статора не пересекаются. Другими словами, вращение мотора отсутствует, как и подача на него напряжения.
Скольжение (если считать его в процентах) не будет нулевым даже в том случае, когда электродвигатель находится в режиме идеального холостого хода. Зато, если агрегат запущен в режиме генератора, S может быть отрицательным.
Такой режим (в нем ротор вращается противоположно относительно статора) будет показывать S, значениям бывают разными, но изменяются только в следующих пределах:
-∞<S<0
Надо отметить, что есть также электромагнитное торможение или противовключение якоря.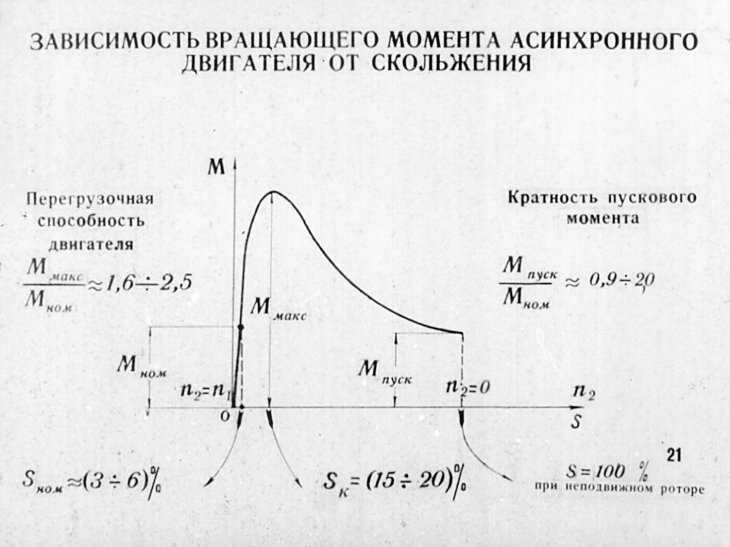 В таком случае скольжение может быть больше, чем единица и положительным.
В таком случае скольжение может быть больше, чем единица и положительным.
Рисунок 1
Частота тока в катушках якоря (f1) равна частоте сетевого тока, но только при пуске агрегата. Если нагрузка номинальная, то частоту электротока (f2) можно высчитать по формуле ниже:
f2=S*f1
Якорный ток имеет прямую зависимость от его индуктивного сопротивления. Это значит, что электроток в якоре зависит от скольжения асинхронного электромотора. Момент вращения агрегата также зависит от S. Его определяют показатели магнитного потока, угла сдвига между электродвижущей силой и якорным электротоком.
Как видно из всего вышесказанного, чтобы провести детальное исследование всех параметров электропривода, нужно установить зависимость. Она схематически изображена на рисунке 1.
Это, в свою очередь, означает, что если ввести в якорную цепь асинхронного двигателя, ротор которого фазный, дополнительное сопротивление, можно регулировать изменение момента в нем, если значения скольжения S различны.
Если ротор в приводе короткозамкнут, момент можно регулировать с использованием преобразователя частоты или двигателя с переменными параметрами.
Если нагрузка на электродвигатель номинальная, S будет равно значениям от 8% до 2%. Это скольжение будет носить название номинального.
Увеличивая нагрузку на вал ротора (то есть момент), будет происходить пропорциональное увеличение величины скольжения.
Выражаясь проще, можно сказать, что роторное магнитное поле никогда не будет быстрее статорного. То есть первое будет тормозить.
Увеличивая скольжение, вы, конечно, добьетесь пропорционального роста тока в якоре. И момент, естественно, тоже вырастет. Но нужно всегда учитывать, что вместе с этим будут расти и активные потери ротора (то есть произойдет увеличение сопротивления). Это повлияет на снижение силы тока и уменьшение коэффициента мощности. Результат: рост момента будет медленнее, чем скольжения.
Критическое скольжение – максимальная величина момента, которой можно достигнуть при определенном S.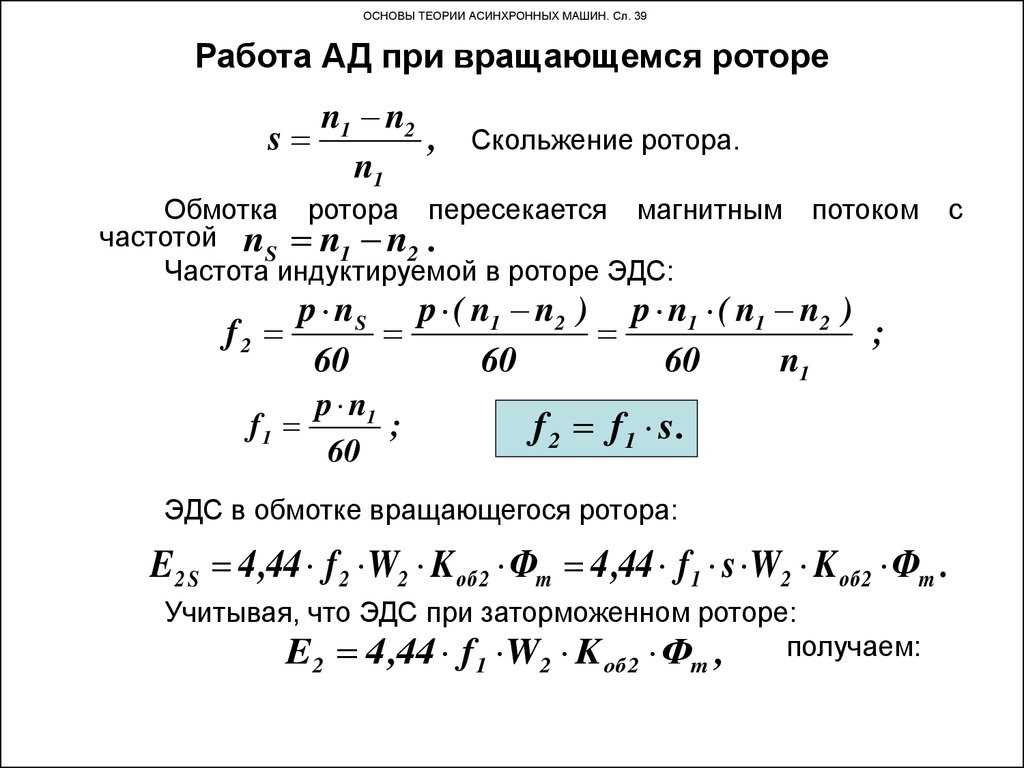 После того, как момент станет максимальным, он начнет идти на убывание. Обозначаю показатель, как правило, через Sкр.
После того, как момент станет максимальным, он начнет идти на убывание. Обозначаю показатель, как правило, через Sкр.
Механическая характеристика, в своем графическом проявлении, выглядит следующим образом:
В данном выражении (его еще называют формулой Клосса) используется величина критического момента (Мк). Его и определяет величина критического скольжения.
График строят, основываясь на характеристиках из документов асинхронной машины. Все вопросы, возникающие по поводу асинхронного агрегата, работающего в режиме движка, решают с помощью данного графика.
Величина допустимого значения мгновенного перегруза электромотора определяется критическим моментом. В случае развития еще более критического М (и, конечно же, увеличения Sкр), можно наблюдать опрокидывание агрегата. Когда это происходит, машина просто перестает работать и выключается. Это аварийный режим.
Для измерения скольжения в электрическом двигателе асинхронного типа есть несколько подходов. При значительной разнице частоты работы от синхронной, S измеряют тахометром или тахогенератором. Это специальный прибор, подключенный к валу электропривода.
При значительной разнице частоты работы от синхронной, S измеряют тахометром или тахогенератором. Это специальный прибор, подключенный к валу электропривода.
Стробоскопический метод. В этом варианте используют неоновую лампу. Замеры можно произвести только в случае, когда скольжение не превышает пяти процентов. На вал движка нужно нанести черту с помощью мелка. Вместе этого можно установить стробоскопический диск. Затем на них светят лампой и считают, сколько раз вал сделал оборот за какой-либо отрезок времени. Окончательные расчеты проводят с помощью специальных формул. В этом методе допустимо использование самого обычного стробоскопа. Его пример приведен ниже.
Третий способ найти скольжение – индуктивная катушка. Как это сделать? Возьмите катушку от электромагнитного реле (контактор) постоянного тока. Она подойдет лучшего всего, так как на ней достаточно много витков, около 20 000. А для таких замеров их требуется не менее 3000. Подключите к катушке точный милливольтметр (он подойдет из-за своей чувствительности). Затем расположите катушку там, где заканчивается вал якоря.
Затем расположите катушку там, где заканчивается вал якоря.
После этого нужно посчитать число совершенных колебаний и по специальной формуле определить скольжение.
Кстати, если ротор у асинхронного мотора фазный, то S можно вычислить, используя магнитоэлектрический амперметр. Устройство подключают к любой их трех фаз в якоре, считают количество колебаний стрелки (за какое-то время) и считают нужный показатель по той формуле, которую используют в методе с катушкой индуктивности.
Скорость скольжения в асинхронном двигателе — электрическое напряжение
Синхронная скорость — это скорость, с которой вращается магнитное поле. Синхронное магнитное поле соединяется с проводником ротора и индуцирует напряжение в роторе. Ток начинает течь в роторе, потому что проводники ротора двигателя замыкаются накоротко. Крутящий момент создается в роторе за счет взаимодействия магнитного поля и тока, протекающего в роторе, и ротор начинает вращаться.
Ток начинает течь в роторе, потому что проводники ротора двигателя замыкаются накоротко. Крутящий момент создается в роторе за счет взаимодействия магнитного поля и тока, протекающего в роторе, и ротор начинает вращаться.
Асинхронный двигатель вращается с синхронной скоростью? Нет, если ротор вращается с синхронной скоростью, индуцированное в роторе напряжение будет равно нулю, и ток ротора также будет равен нулю. Следовательно, крутящий момент двигателя равен нулю. Работа двигателя невозможна, если ротор пытается вращаться с синхронной скоростью. Ротор асинхронного двигателя всегда отстает от синхронной скорости двигателя.
Определение скольжения
Отставание фактической скорости (N) двигателя от синхронной скорости (Ns) называется скольжением.
Скольжение асинхронного двигателя обозначается символом S. Скольжение асинхронного двигателя представляет собой разницу между синхронной скоростью и фактической скоростью и может быть математически записано как ;
S = Ns – N
Фактическая скорость двигателя всегда меньше синхронной скорости двигателя.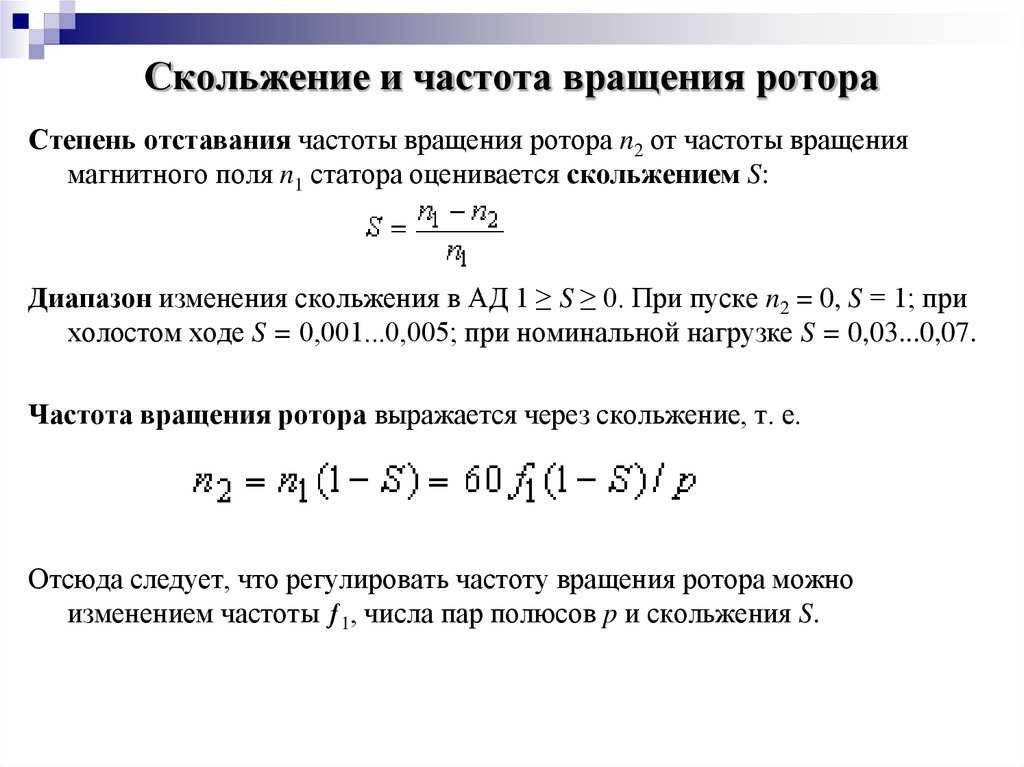
Скольжение может быть представлено в процентах (%) как;
Скольжение также может быть представлено в единицах (о.е.). Дробная часть синхронной скорости называется дробным скольжением или единичным скольжением.
Скорость вращения ротора двигателя можно определить с помощью следующего математического выражения.
Скольжение асинхронного двигателя также может быть выражено угловой скоростью, синхронной скоростью и фактической скоростью.
Скольжение асинхронного двигателя варьируется от 2 до 4 %.
Наглядные примеры:
4-полюсный асинхронный двигатель с частотой 50 Гц имеет скольжение 4 %. Какова реальная скорость двигателя?
Синхронная скорость 4-полюсного асинхронного двигателя 50 Гц составляет
Ns= 120 x 50/4 = 1500 об/мин.
Скольжение = 0,04
Фактическая скорость N = Ns(1-S)
n = 1500 (1-0,04)
n = 1500 x 0,96
n = 1440 об / мин
А 4 столбы, скорость индукционного моторного ротора 50 Гц составляет 1480 об / мин. Какова скорость скольжения двигателя? Двигатель потребляет 500 кВт от источника питания. Каковы потери меди в двигателе.
Какова скорость скольжения двигателя? Двигатель потребляет 500 кВт от источника питания. Каковы потери меди в двигателе.
Синхронная скорость 4-полюсного асинхронного двигателя 50 Гц составляет
Ns = 120 x 50/4 = 1500 об/мин.
Фактическая скорость (N) = 1480 об/мин
Скольжение (S) = (Ns-N)/Ns x 100 1.33 %
Input Power = 500 kW
Copper loss = Slip x Input Power
Copper loss = 0.0133 x 500
Copper loss = 6.66 kW
Read More:
Характеристики момента скольжения асинхронного двигателя
Разноцветные слипоны Math Formula
Перейти к информации о продукте
79,95 €
79,95 €
Цена за единицу / за
Стиль Женские слипоны белого цвета Женские слипоны черного цвета Мужские слипоны белого цвета Мужские слипоны черного цвета Размер США 6 / ЕС36 США 7 / ЕС37 США 7,5 / ЕС38 США 8 / ЕС39США 8,5 / ЕС 39,5 США 9 / ЕС40 США 10 / ЕС41 США 10,5 / ЕС42 США 11 / ЕС 42,5 США 11,5 / ЕС43 США 6 / ЕС39 США 6,5 / ЕС 39,5 США 7 / ЕС40 США 8 / ЕС41 США 9 / ЕС42 США 9.
Черная подошва
Варианты продукта
Женские Слипоны Белый / US 6 / EU36 / Белая подошва
— €79,95
Женские Слипоны Белые / US 7 / EU37 / Белая подошва
— €79,95
Женские слипоны, белые / США 7,5 / ЕС38 / Белая подошва
— 79 евро,95
Женские Слипоны Белые / US 8 / EU39 / Белая подошва
— €79,95
Женские слипоны, белые / США 8,5 / ЕС 39,5 / Белая подошва
— €79,95
Женские слипоны, белые / US 9 / EU40 / Белая подошва
— €79,95
Женские Слипоны Белые / US 10 / EU41 / Белая подошва
— 79 евро,95
Женские слипоны, белые / США 10,5 / ЕС42 / Белая подошва
— €79,95
Женские Слипоны Белые / США 11 / ЕС 42,5 / Белая подошва
— €79,95
Женские слипоны, белые / США 11,5 / ЕС43 / Белая подошва
— €79,95
Женские Слипоны Черный / US 6 / EU36 / Черная подошва
— 79 евро,95
Женские Слипоны Черный / US 7 / EU37 / Черная подошва
— €79,95
Женские Слипоны Черный / US 7.
 5 / Белая подошва
— €79,95
Мужские слипоны, белые / США 11,5 / ЕС45 / Белая подошва
— €79,95
Мужские Слипоны Белые / US 12 / EU46 / Белая подошва
— 79 евро,95
Мужские Слипоны Белые / US 13 / EU47 / Белая подошва
— €79,95
Мужские Слипоны Черный / US 6 / EU39 / Черная подошва
— €79,95
Мужские слипоны, черные / США 6,5 / ЕС 39,5 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 7 / EU40 / Черная подошва
— 79 евро,95
Мужские Слипоны Черный / US 8 / EU41 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 9 / EU42 / Черная подошва
— €79,95
Мужские слипоны, черные / США 9,5 / ЕС 42,5 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 10 / EU43 / Черная подошва
— 79 евро,95
Мужские Слипоны Черный / США 10,5 / ЕС44 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 11 / EU44.
5 / Белая подошва
— €79,95
Мужские слипоны, белые / США 11,5 / ЕС45 / Белая подошва
— €79,95
Мужские Слипоны Белые / US 12 / EU46 / Белая подошва
— 79 евро,95
Мужские Слипоны Белые / US 13 / EU47 / Белая подошва
— €79,95
Мужские Слипоны Черный / US 6 / EU39 / Черная подошва
— €79,95
Мужские слипоны, черные / США 6,5 / ЕС 39,5 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 7 / EU40 / Черная подошва
— 79 евро,95
Мужские Слипоны Черный / US 8 / EU41 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 9 / EU42 / Черная подошва
— €79,95
Мужские слипоны, черные / США 9,5 / ЕС 42,5 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 10 / EU43 / Черная подошва
— 79 евро,95
Мужские Слипоны Черный / США 10,5 / ЕС44 / Черная подошва
— €79,95
Мужские Слипоны Черный / US 11 / EU44.