
Устройство электродвигателей переменного тока :: SYL.ru
При помощи электродвигателей переменного тока происходит конвертация электроэнергии в механическую. Бывают моторы переменного и постоянного тока. У них есть много отличий, особенно в конструкции. В промышленности большое распространение получили электродвигатели, работающие на переменном токе. Их можно встретить как в бытовых приборах, так и в промышленности. Они встречаются везде — в стиральных машинах, автомобилях, перфораторах, болгарках, производственных станках.
Как работает электродвигатель?
Функционирование электромоторов напрямую зависит от законов Ампера и электромагнитной индукции Фарадея. Закон Фарадея гласит, что на замкнутых проводниках, которые расположены в магнитном поле, генерируется ЭДС. В моторах поле создается обмотками статора, именно по ним проходит переменный электрический ток. Трехфазные электрические двигатели переменного тока работают именно по этим законам.

Закон Ампера описывает вращение ротора внутри статора. Когда по проводнику протекает электрический заряд, при условии, что воздействует магнитное поле, появляется электродвижущая сила. Причём эта движущая сила направлена перпендикулярно силовым линиям поля. При этом ротор, установленный по центру двигателя на подшипниках, начинает вращаться.
Асинхронный двигатель
В промышленности огромную популярность завоевали асинхронные электродвигатели переменного тока. Они очень неприхотливые, отдают высокую мощность, надежны. Устройство электродвигателя переменного тока асинхронного типа состоит из нескольких частей:
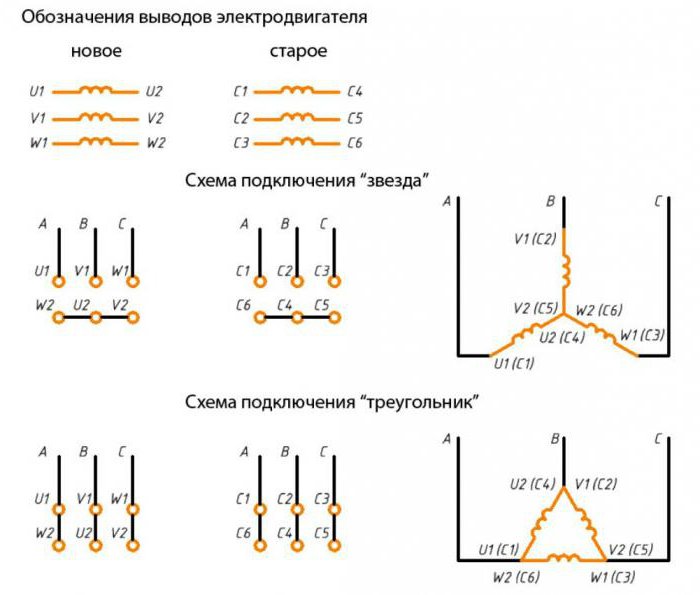
- Неподвижная часть — статор, имеет цилиндрическую форму. Выполнен из стальных листов с пазами, в которые укладываются обмотки. Оси обмоток расположены под углом 120 градусов друг к другу. Все края обмоток выводятся в коробку, расположенную сверху мотора. Всего шесть выводов, которые можно соединить по схеме «звезда» или «треугольник». Зависит от того, какие параметры у электропривода.
- Чаще всего используется короткозамкнутый ротор. Конструкция его называется «беличья клетка» за внешнее сходство. В ней имеется несколько стержней из меди или алюминия, которые коротко замкнуты при помощи металлических колец на торцах.
- Фазный ротор немного иной конструкции. На нем укладывается три обмотки, напоминающие те, которые расположены в статоре. Края всех обмоток выводятся в коробку, где производится их соединение. При помощи фазного ротора можно добавить в цепь питания обмотки резистор, способный менять сопротивление. Это позволяет уменьшить силу тока при запуске.
Обязательно на асинхронном электродвигателе устанавливается крыльчатка, которая позволяет охлаждать обмотки, две крышки, подшипники, коробка, вал.
Как работает асинхронник?

Функционирует асинхронный электрический двигатель по законам электромагнитной индукции. ЭДС возникает в том случае, когда у магнитного поля обмоток статора и ротора разная скорость вращения. В случае, если эти параметры были бы одинаковы, электродвижущая сила не смогла бы сгенерироваться. Но так как на ротор воздействуют тормозящие факторы, например, трение и нагрузка со стороны подшипников, то всегда будут благоприятные условия для работы устройства.
Синхронные электродвигатели
Однофазные электродвигатели переменного тока синхронного типа получили широкое распространение. Конструкция у таких моторов немного отличается от рассмотренной выше. В них ротор вращается с такой же скоростью, с какой движется магнитное поле обмоток статора. А на якоре имеются обмотки, соединенные с коллектором. Конструкция контактных площадок выполнена так, что в один момент времени питание подается при помощи графитовых щеток только на пару противоположных ламелей.

Следовательно, запитана только одна обмотка на роторе. Подобные коллекторные электродвигатели переменного тока получили широкое распространение в бытовой технике. Например, в электроинструментах, стиральных машинах, двигателях привода компрессоров кондиционеров или холодильников.
Как работает синхронный электродвигатель?
Всего можно выделить несколько этапов работы асинхронного электродвигателя:
- Возникновение вращающего момента происходит, как только начинают взаимодействовать магнитный поток в статоре и электрический ток в роторе.
- Магнитный поток изменяет направление своего движения. Причём происходит это одновременно с реверсом тока. При помощи такого поведения получается сохранить вращение ротора в одном направлении.
- Чтобы добиться необходимой частоты вращения ротора, достаточно произвести регулировку питающего напряжения. Во многих бытовых приборах используется для этой цели простой реостат, который изменяет свое сопротивление.
Конструкция синхронного двигателя весьма ненадежная, так как очень часто изнашиваются графитовые щетки, либо ослабляются их пружины. При разрушении подшипников на валу появляется характерный неприятный звук. Со временем загрязняются ламели на коллекторе. Их можно очистить при помощи наждачной бумаги или спиртосодержащими растворами.
Особенности диагностики синхронных двигателей

Чтобы осуществить проверку электродвигателя, необходимо полностью обесточить инструмент и разобрать его. Если имелось короткое замыкание, то внутри изоляционный материал начнёт оплавляться, и появится неприятный запах. Поэтому первым делом необходимо понюхать ротор. Если нет признаков поломки, то проверьте на якоре состояние ламелей. Делается это при помощи мультиметра.
Переключаете его в режим измерения сопротивления с порогом 200 Ом. Прозвоните все соседние ламели. Если сопротивление меняется, то это говорит о том, что внутри катушки имеется поломка. Вместо мультиметра можно использовать простую лампу накаливания. Для этого необходимо подключить электродвигатель к источнику питания 12 Вольт, в разрыв установить лампу накаливания. Вращая вал рукой, необходимо посмотреть на поведение лампы.
В случае если лампа начинает моргать, это говорит о наличии межвиткового замыкания. Если же она совсем не горит, то имеется обрыв в цепи питания, либо неисправна одна из ламелей. Чтобы проводить ремонт, необходимо заменить обмотку и установить новую изоляцию. Только в этом случае двигатель не перегорит. Обязательно после ремонта проведите испытание электродвигателя переменного тока. Для увеличения ресурса мотора обязательно нужно проводить перемотку ротора каждые два года.
Преимущества и недостатки моторов, работающих на переменном токе

Большую популярность приобрели трехфазные электродвигатели переменного тока асинхронного типа. В промышленности их доля составляет более 95%. Но у них имеется недостаток — изменение частоты вращения можно производить только лишь путем регулировки частоты электрического тока. Для этого используются частотные преобразователи, стоимость которых довольно высокая. При изменении частоты вращения снижается, причем существенно, мощность электродвигателя. У асинхронников очень высокий пусковой ток, а момент при старте крайне низкий. Но можно также применять редукторы, чем-то похожие на автоматическую коробку передач, используемую в автомобилях.

У синхронных моторов имеется один большой недостаток — это его конструкция. Щетки из графита очень быстро разрушаются под действием нагрузки, в результате чего теряется контакт. У них также могут выходить из строя подшипники, разрушаться обмотки, а их вдвое больше, нежели у асинхронных машин. Запустить синхронную машину намного сложнее, нежели асинхронную. Поэтому в промышленности они большого распространения не получили. Да и асинхронник способен дольше работать под большими нагрузками, не испытывая «дискомфорт».
Подключение к трехфазной сети питания
Всего имеется две схемы, по которым соединяются обмотки трехфазных электрических двигателей:
- «Звезда» — крайне низкие пусковые токи, но добиться высокой мощности в этом случае вряд ли получится.
- «Треугольник» — пусковой ток очень высокий, поэтому использование такой схемы рекомендуется при работе в устоявшемся режиме.
Подключить асинхронный двигатель к сети переменного тока с трехфазным напряжением очень просто.
Для этого в клеммной коробке необходимо соединить шесть выводов обмоток. Но если вы произведете подключение неверно, то обмотки расплавятся. Потребуется проводить ремонт электрической машины. Синхронные машины намного сложнее подключить, так как необходимо правильно соединить обмотки ротора из статора.
Подключение трехфазного двигателя в однофазную сеть
Для того чтобы произвести подключение трехфазного асинхронного двигателя в бытовую сеть, лучше всего воспользоваться конденсаторами. С их помощью можно произвести сдвиг по фазе питающего напряжения. Таким образом, вы получите третью дополнительную фазу, необходимую для запуска и работы электродвигателя. Если нужно запускать мотор мощностью до 1,5 кВт, то достаточно применять один рабочий конденсатор. Если же мощность свыше 1,5 кВт, то параллельно ему потребуется включать еще один посредством выключателя. Он должен работать только несколько секунд, пока двигатель не запустится. Так запускаются электродвигатели переменного тока 220В и 380В от бытовой сети.
Вентильный двигатель — Википедия
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
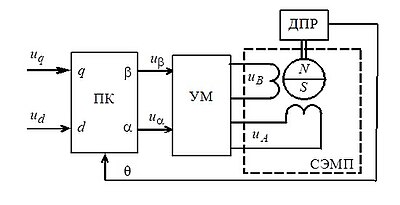
СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид[4]:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструктивно современные вентильные приводы состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор[править | править код]
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор[править | править код]
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора[править | править код]
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления[править | править код]
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Двигатель асинхронный однофазный — устройство, принцип работы и схема подключения
Никто глубоко не задумывался о том, как бы жили люди без такого изобретения, как электродвигатель асинхронный однофазный. Казалось бы, что такое умное слово никого не касается и витает где-то в заоблачной дали. Но этот большой помощник в быту встречается на каждом шагу.
Скажите, как можно обходиться без холодильника или пылесоса. А ведь не будь двигателя, всего этого не было бы сейчас. Предлагаем в статье узнать все подробности об этом устройстве, а дочитавшим до конца будет бонус в виде полезного справочника по асинхронным двигателям

Так выглядит однофазный асинхронный двигатель.
История возникновения
Более 60 лет понадобилось многим ученым, пока однофазный асинхронный двигатель начал покорять просторы земного шара. Началось все с 1820-х годов, когда Джозеф Генри и Майкл Фарадей – открыли явления индукции и начали первые эксперименты.
 Принцип работы асинхронного двигателя (однофазного) основан на этих основных физических законах. В 80-х годах позапрошлого столетия многие умы разрабатывают трансформаторы и генераторы переменного тока. Год 1885 принес идею первого многофазного двигателя переменного тока от Галилео Феррариса, вскоре Никола Тесла уже представил свой многофазный мотор (1888 год).
Принцип работы асинхронного двигателя (однофазного) основан на этих основных физических законах. В 80-х годах позапрошлого столетия многие умы разрабатывают трансформаторы и генераторы переменного тока. Год 1885 принес идею первого многофазного двигателя переменного тока от Галилео Феррариса, вскоре Никола Тесла уже представил свой многофазный мотор (1888 год).В 1889-1891годах русский электротехник, поляк по происхождению, Михаил Осипович Доливо-Добровольский придумал ротор в виде “беличьей клетки”. К этому изобретению его подтолкнул доклад Феррариса «О вращающемся магнитном поле». С началом ХХ века пришло широкое внедрение электромеханических устройств.
Применение однофазных асинхронных двигателей
Известно, что однофазные двигатели уступают трехфазным по некоторым характеристикам. Однофазные моторы имеют в основном бытовое назначение:
- пылесосы;
- вентиляторы;
- электронасосы;
- холодильники;
- машины для переработки сырья.
Для того, чтобы выполнить подключение асинхронного двигателя нужна однофазная сеть переменного тока. Такие двигатели работают при напряжении 220 Вольт и частоте 50 Гц. Прилагательное «асинхронный» указывает на то, что скорость вращения якоря отстает от магнитного поля статора.
Однофазные двигатели имеют две независимых цепи, но работают они в основном на одной, отсюда и название. Основные части двигателя:
- Статор (неподвижный элемент).
- Ротор (вращающаяся часть).
- Механическое соединение этих двух частей.
- Поворотные подшипники.
Соединение состоит из внутренних колец, установленных на закрепленных втулках вала ротора, наружных колец в защитных боковых крышках, прикрепленных к статору.
Для запуска однофазного асинхронного двигателя с пусковой обмоткой установлена другая катушка. Обмотка стартера установлена со смещением от рабочей катушки на 900 С. Для создания сдвига тока, в цепи однофазного двигателя имеется схема сдвига фаз. Сдвиг можно получить при помощи различных элементов. Это могут быть:
- Активное сопротивление.
- Емкостное.
- Индуктивное.
В видео, представленном ниже, показан принцип работы однофазных асинхронных двигателей.
Принцип действия
Обмотки статора при помощи переменного тока образуют магнитные поля. Они имеют одинаковую амплитуду и частоту, но действуют в разных направлениях, поэтому статический ротор начинает вращаться.
Если в двигателе отсутствует пусковой механизм, ротор останавливается, потому что результирующий крутящий момент равен нулю. В случае, когда ротор начинает вращаться в одном направлении, соответствующий крутящий момент становится выше, когда вал двигателя продолжает вращаться в заданном направлении.

Принцип работы однофазного асинхронного двигателя.
Момент запуска
Сигналом к запуску становится магнитное поле двух обмоток, вращающее подвижную часть двигателя. Оно создается 2 обмотками: главной и пусковой. Дополнительная обмотка меньшего размера является пусковой и подключается к основной схеме включения однофазного двигателя через ёмкостное или индуктивное сопротивление.

Подключение происходит только в момент пуска. При удержании пусковой кнопки короткое время (порядка 2-3 секунд) происходит разгон ротора. В момент отпускания кнопки электрический мотор переходит в режим работы основной фазы.
Пусковая обмотка может работать кратковременно. Более длительное время нахождения под нагрузкой может вызвать перегревание и воспламенение изолирующих элементов, что приведет к выходу из строя.
Надежность повышается за счет встраивания в схему однофазного асинхронного двигателя таких элементов как тепловое реле и центробежный выключатель. Последний отключает пусковую фазу в тот момент, когда ротор разгоняется до номинальной скорости. Отключение происходит автоматически.
Работа реле происходит следующим образом: когда обмотки нагреваются до предельного значения, установленного на реле, механизм прерывает подачу питания на обе фазы, предотвращая отказ из-за перегрузки или по любой другой причине. Это защищает от возгорания.
Возможно, вам будет интересно также почитать все, что нужно знать о шаговых электродвигателях в другой нашей статье.
Варианты подключения
Для того, чтобы мотор заработал необходимо иметь одну 220-вольтовую фазу. Это значит, что подойдет любая стандартная розетка. Благодаря этой простоте двигатели завоевали популярность в быту. Любой прибор, начиная от стиральной машины и до соковыжималки, имеет подобные механизмы в своем составе.
Известны два типа однофазных двигателей в зависимости от способа подключения:
- Однофазный асинхронный двигатель с пусковой обмоткой.
- Однофазный двигатель с конденсатором.
Схема подключения однофазного асинхронного двигателя с помощью конденсаторов изображена на рисунке.

Схема подключения однофазного асинхронного двигателя с помощью конденсаторов.
Схема содержит пусковую обмотку с конденсатором. После ускорения ротора происходит выключение катушки. Рабочий конденсатор не позволяет размыкаться пусковой цепи, и запускающая обмотка работает через конденсатор в постоянном режиме.
Одновременно с рабочей обмоткой пусковая катушка снабжена током через конденсатор. При использовании в режиме пуска у катушки более высокое активное сопротивление. Фазовый сдвиг при этом имеет достаточную величину, чтобы началось вращение.
Допускается брать пусковую обмотку, с меньшей индуктивностью и большим сопротивлением. Запуск конденсатора осуществляется при подключении его к пусковой обмотке и временному источнику питания.
Чтобы достичь максимального значения пускового момента требуется вращающееся магнитное поле. Для этого нужно добиться положения обмоток под углом 900. При правильно рассчитанной емкости конденсатора обмотки могут быть смещены на 900 градусов. Расчет однофазного асинхронного двигателя зависит от схем подключения, которые приведены ниже.

Схемы включения однофазного асинхронного двигателя.
Различные варианты подключения:
- временное включение электрического тока на стартовую обмотку через конденсатор;
- подача на пусковое устройство через резистор, без конденсатора;
- запуск через конденсатор на пусковую обмотку постоянно, одновременно с работой рабочей обмотки.
Расчет проводной принадлежности
Для расчета проводов, соединяющих рабочую и пусковую обмотки, понадобится омметр. Измеряется сопротивление обмоток. R рабочей обмотки должно быть ниже, чем у стартера. Например, если измерения составили 12 Ом для одной обмотки и 30 Ом для другой, то сработают обе. У рабочей обмотки поперечное сечение больше, чем у выходной.
Выбор емкости конденсатора
Чтобы определить емкость конденсатора, необходимо знать ток потребления электродвигателя. Если ток 1,4 А, то понадобится конденсатор емкостью 6 микрофарад. Также можно ориентироваться на таблицу расчета емкости конденсатора, приведенную ниже.

Таблица расчета емкости конденсаторов.
Проверка работоспособности
Тестирование начинается с визуального осмотра. Возможные неисправности:
- Если опорная часть на устройстве была сломана, это может привести к неисправностям.
- При потемнении корпуса в средней части идет перегрев. Бывает попадание в корпус различных посторонних предметов, это способствует перегреванию. При износе и загрязнении подшипников возможен перегрев.
- Когда однофазный электродвигатель на 220 вольт имеет в схеме подключения конденсатор увеличенного размера, он начинает перегреваться.
Если есть подозрение на наличие такого элемента, его необходимо отсоединить от пусковой обмотки, включить двигатель в сети и вращать вал вручную.
Запустить двигатель минут на пятнадцать, а затем проверить, не прогрелся ли он. Если двигатель не греется, причиной являлась увеличенная емкость конденсатора. Необходимо установить конденсатор, имеющий меньшую емкость.
Для лучшего понимания механизма работы двигателей, рекомендуем также подробнее прочитать, что такое трехфазный двигатель и как он работает.
Достоинства и недостатки
Основными плюсами являются:
- простота конструкции;
- повсеместная доступность однофазных сетей переменного тока 220 В при частоте 50 Гц (практически во всех районах).
К минусам можно отнести следующие обстоятельства:
- невысокий пусковой момент двигателя;
- низкая эффективность.

Основные достоинства и недостатки однофазных асинхронных двигателей
Заключение
Маломощные однофазные электродвигатели выпускаются в разной модификации и для разного назначения. Перед приобретением необходимо точно знать некоторые характеристики. Подробно с устройством данного типа двигателей можно ознакомиться, скачав книгу Алиева И. И. Асинхронные двигатели в трехфазном и однофазном режимах.
Российские производители предлагают некоторые серии устройств, имеющие мощность от 18 до 600 Вт, частоту вращения 3000 и 1500 об/мин. Все они предназначены для подключения в сеть с напряжением 127, 220 или 380 Вольт и частотой 50 Гц.
Конструкция асинхронного электродвигателя — 160 фото, схемы, чертежи и примеры использования
Асинхронные электродвигатели – это один из самых широко применяемых видов двигателей. Их можно встретить везде – в стиральной машинке, вентиляторе, вытяжке и т.п. вещах. Об особенностях конструкции подобных устройств и пойдёт речь в этой статье.
Краткое содержимое статьи:
Понятие асинхронного электрического двигателя
Как видно на фото асинхронного двигателя, подобный агрегат представляет собой электромашину, назначение которой заключается в преобразовании электроэнергии в энергию механического типа. Другими словами, подобное оборудование, потребляя электроток, даёт крутящий момент. Именно он позволяет вращать многие агрегаты.

Название «асинхронный» значит «неодновременный». Если изучить описание асинхронных двигателей, то можно заметить, что в таких устройствах ротор вращается с меньшей частотой, чем электромагнитное поле статора.

Данное отставание или, как его ещё называют, скольжение можно высчитать, используя следующую формулу:
S = (n1— n2)/ n1 — 100%, где
n1 – частота электромагнитного поля статора;
n2 – частота вращения вала.
Асинхронный двигатель с короткозамкнутым ротором: конструкция, принцип работы
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
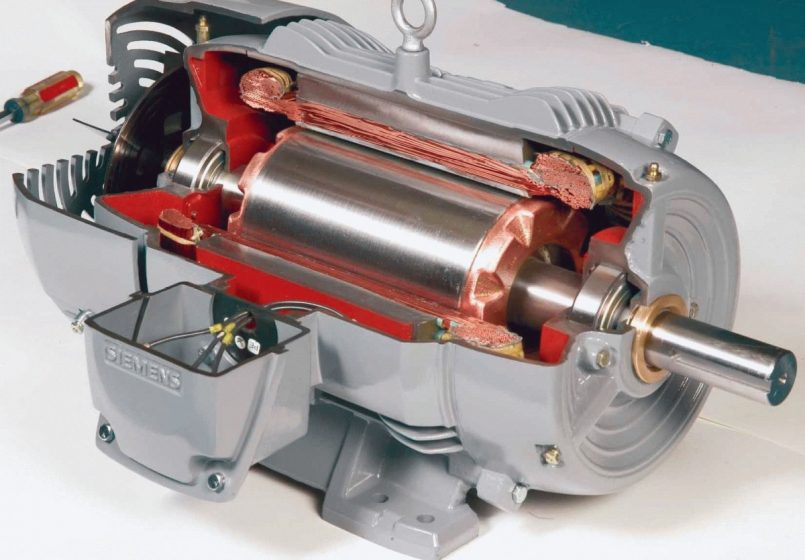
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
 Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Рис. 1. Строение асинхронного двигателя с КЗ РоторомНемного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
 Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Рис. 2. Ротор асинхронного двигателя с КЗ обмоткамиПластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
 Рис. 3. Кривая крутящего момента скольжения
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
 Рис. 4. Схемы подключения
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
 Рис. 5. Примеры схем подключений в однофазную сеть
Рис. 5. Примеры схем подключений в однофазную сетьС целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.