
устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
 до угла в 90°")
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.

Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.

Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.

То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
Шаговый двигатель для ЧПУ | Техника и человек
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
- Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
FAQ • Шаговые двигатели или серводвигатели?
Отличия
Основное отличие шаговых двигателей от серводвигателей — то, что шаговые двигатели работают без обратной связи, т.е. нет контроля — сделал ШД шаг или нет. Драйвер серводвигателя считывает показания датчика положения вала и корректирует его положение. На самом деле, отсутствие обратной связи в случае с ШД не является минусом, т.к. при правильно спроектированной и настроенной системе шаговые двигатели не пропускают шагов, т.е. пользователь не нуждается в таком контроле.
Достоинства и недостатки
Достоинства ШД:
- Точность и стабильность шага, ШД может работать с инерционными нагрузками.
- Не нужна обратная связь. ШД сам по себе это датчик положения.
- ШД — самый доступный, бюджетный, стандартный электродвигатель. Прост в подключении и настройке.
- ШД имеет долгий срок службы.
- ШД безопасен, имеет конечный момент — он останавливается в случае заклинивания передачи.
- ШД имеет хороший момент на низких оборотах, это позволяет обойтись без редуктора.
Достоинства серводвигателей (щеточных):
- Высокая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Точность позиционирования определяется установленным энкодером.
- Высокий КПД, до 90% с легкими нагрузками.
- Может быстро ускоряться.
- Может кратковременно отдать повышенную мощность (2-3 раза) и повышенный момент (5-10 раза)
- Двигатель не нагревается, потребляется ток пропорционально нагрузке.
- На высоких скоростях не шумит.
- Не резонирует и не вибрирует во всем диапазоне частот вращения.
Недостатки шаговых двигателей:
- Низкий КПД. ШД потребляет достаточно энергии не зависимо от нагрузки.
- Низкая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Крутящий момент сильно зависит от оборотов вращения, сильно падает с увеличением частоты вращения.
- Склонность к резонированию. Требует микрошагового управления для плавного вращения и техник подавления резонансов.
- Отсутствие обратной связи для контроля за пропуском шагов.
- Не может быстро ускоряться.
- ШД сильно нагревается при оптимальном использовании.
- При кратковременной перегрузке, ШД остановится и не сможет восстановить положение вала.
- ШД достаточно шумный (звуковой шум)
Недостатки серводвигателей (щеточных):
- Более высокая стоимость, сравнительно с ШД.
- Система с серводвигателем требует настройки.
- Сложная система. Много соединительных проводов. Наличие энкодера.
- Небезопасная система, если нарушается обратная связь — серводвигатель может провернуть передачу. Требуются системы экстренного отключения.
- Щетки изнашиваются. После 2000 часов работы, требуется их замена.
- Серводвигатель может перегореть при постоянной перегрузке.
- Требуется мощный источник питания, чтобы система была устойчива к кратковременным перегрузкам.
- Серводвигатель отдает максимальный момент на высоких оборотах, поэтому может потребоваться редуктор.
- Серводвигатели плохо охлаждаются. Серводвигатели с вентиляционными отверстиями быстро засоряются продуктами обработки материалов.
Выбор — ШД или серводвигатели
При разработке станка и выборе электродвигателей в первую очередь необходимо рассчитать, какая мощность N(Вт) требуется для управления вашим механизмом. Мы не рекомендуем сначала приобретать электродвигатель а потом пытаться его «приладить» к своей конструкции. Мы рекомендуем использовать шаговые электродвигатели, если расчетная мощность <100Вт и серводвигатели если расчетная мощность >200Вт. Если расчетная мощность находится в диапазоне 100…200Вт — подойдет и шаговый и серводвигатель, выбор ложится на пользователя. При выборе шагового двигателя стоит учитывать тот факт, что у него момент падает с увеличением частоты вращения, согласно приведенным в ТХ графикам.
Метод расчета мощности: Допустим у вас есть ЧПУ плазморез с ременной передачей или подобный ЧПУ станок с малой рабочей нагрузкой (нет усилия для фрезеровки, нужно только перемещать головку плазмореза или лазера). Вам необходимо рассчитать мощность для перемещения оси Y. Допустим Ваша расчетная скорость подачи f=10000 мм/мин, масса перемещаемой конструкции с запасом m=20кг. По инженерной формуле, потребуется мощность N=(f*m)/6120=33Вт. В данном случае можно использовать шаговый двигатель.
Проведем расчет для фрезерного станка ЧПУ. Пусть у вас установлен винт ШВП 1605 — с шагом n=5мм на оборот. Пусть вам необходима скорость подачи f=3000 мм/мин. Рассчитаем необходимые обороты электродвигателя с прямым приводом на винт ШВП RPM=f/n=600 об/мин. Необходимо определить вращающий момент, который нужно приложить к винту ШВП чтобы обеспечить необходимое усилие на фрезе, пусть это будет момент M. Размерность момента Н*м=(кг*см)/10 — масса в кг, которую нужно приложить к рычагу длиной 1см. Пусть в данном случае нам необходим момент 35кг*см=3,5Н*м. Мощность рассчитывается по формуле N=M*RPM*pi/30=220Вт. В данном случае нужно использовать серводвигатель.
Выбор шагового двигателя | PureLogic R&D
- Статьи
- Конструирование портальных станков с ЧПУ
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
Модель работы идеального шагового двигателя
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
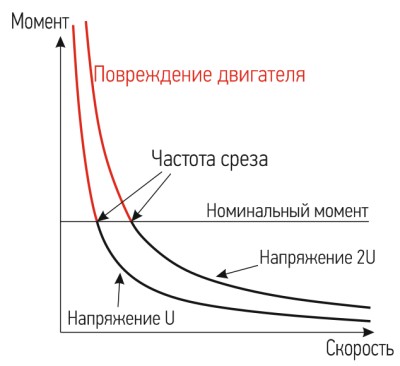
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.

В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики.

Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обусловлено переходным процессом в цепи — драйвер постепенно превращается из источника тока в источник напряжения.
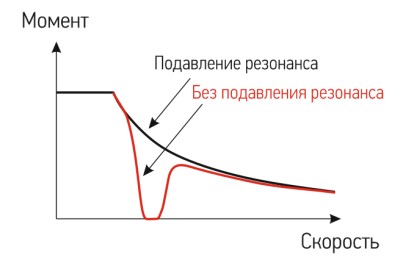
Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
Мощность двигателя
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.

Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
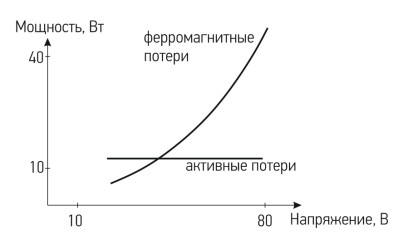
Напряжение питания и нагрев двигателя
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика — кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной.
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания — тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях — «медленный» и «быстрый», с большой и малой индуктивностью. Причем «быстрые» модели пользуются большей популярностью — для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п. Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю — он должен быть способен выдавать именно такой уровень тока. Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 4 вещей — производителя, вида двигателя, размера и индуктивности. Первый параметр поддается оценке с трудом — мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик — размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов — определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Совместно с этими оценками можно использовать оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. — двигатели PL57-76 или аналогичные. Рабочее поле 0,5-1 кв.м. — двигатели PL86-80 или аналогичные. Рабочее поле 1-1,5 кв.м. — двигатели PL86-114 или аналогичные. Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы. Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать — обратиться за консультацией к опытным специалистам.
О шаговых двигателях и том, как их есть
Недавно я уже писал о том, что поимел большую головную боль в виде необходимости выбирать себе новые шаговые движки. Когда-то давно, когда трава была зеленее… Ну, в общем, закупил себе набор движков, который валялся до поры до времени. Закупал их особо не заморачиваясь и не разбираясь, как их выбирать и на что сомтреть. Не повторяйте моих ошибок, изучите вопрос. Ниже я опишу подробно, что мне удалось с тех пор узнать о шаговых движках, а в частности о том, как грамотно подойти к вопросу их выбора.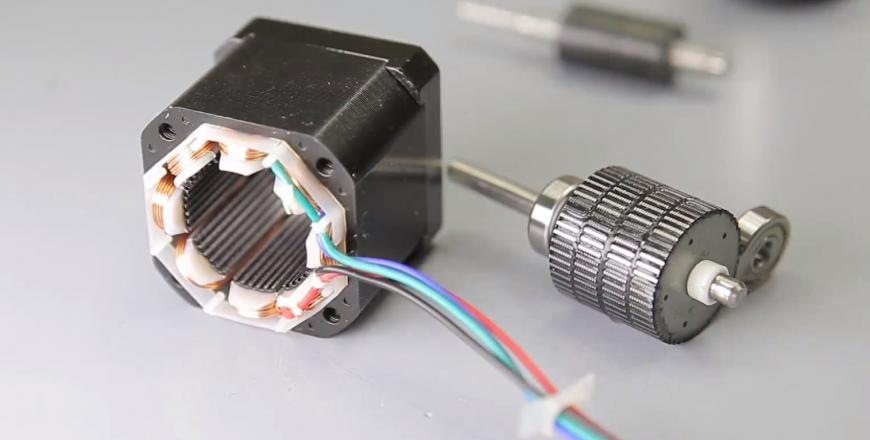 Но сначала, для того, чтобы лучше понимать вопрос — давайте разберёмся,- ‘что же такое шаговый электродвигатель?’.
Но сначала, для того, чтобы лучше понимать вопрос — давайте разберёмся,- ‘что же такое шаговый электродвигатель?’.Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.Так говорит нам википедия, хотя я бы назвал его не ‘бесщёточный’, а ‘бесколлекторный’, но с википедией спорить не будем, её всё таки ‘умные’ люди пишут. Да и суть от этого не сильно меняется, это, по сути своей, такой же двигатель, что и другие. Как, например, на дорогой гоночной машинке с БК движком. Такой же, да вот не такой!
Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.И вот тут мы в плотную подходим к двум парам важных характеристик шагового электродвигателя. Первая пара это удерживающий момент и номинальный ток, а вторая угол поворота (шаг) и погрешность шага. Пройдёмся по каждой паре подробно.
Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.Если ток завышен, то двигатель греется, если ток занижен, то снижается сила, с которой он сопротивляется проворачиванию, и двигатель может начать (и начнёт) пропускать шаги. Так же необходимо помнить, что самый распространённые драйверы для шаговых двигателей A4998 и DRV8825 могут обеспечить только 2А и 2.2А соответственно. Не нужно гоняться за заоблачными показателями. 4000 г/см и 1.7-1.8А хватит за глаза и уши даже для такой брутальной кинематики, как H-Bot.
Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.
И тут можно задаться вопросом, — ‘а как же напряжение?’. Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. Последние — экзотика в наших краях (ну я по крайней мере вообще их в руках не держал). А вот те, что с 6-тью проводами — те встречаются. Если просто, то это тоже самое, что и с 4-мя, но на обеих обмотках есть центральный отвод. Более наглядно можно посмотреть на иллюстрации, которую я честно где-то стырил.

Но я так и не сказал, что брать? Если есть 4-выводной, берём его, если нет, не расстраиваемся и берём 6-выводной. Но лучше берите 4-выводной (мороки меньше). Кстати, на картинке 8-выводной двигатель показан в режиме, когда у него пары обмоток подключены параллельно.
О чём ещё не сказал? О размерах? Ну разве ими кого-то удивишь? Наш типоразмер это Nema17, тут ничего нового. Можно и другие, но это уже снова экзотика.
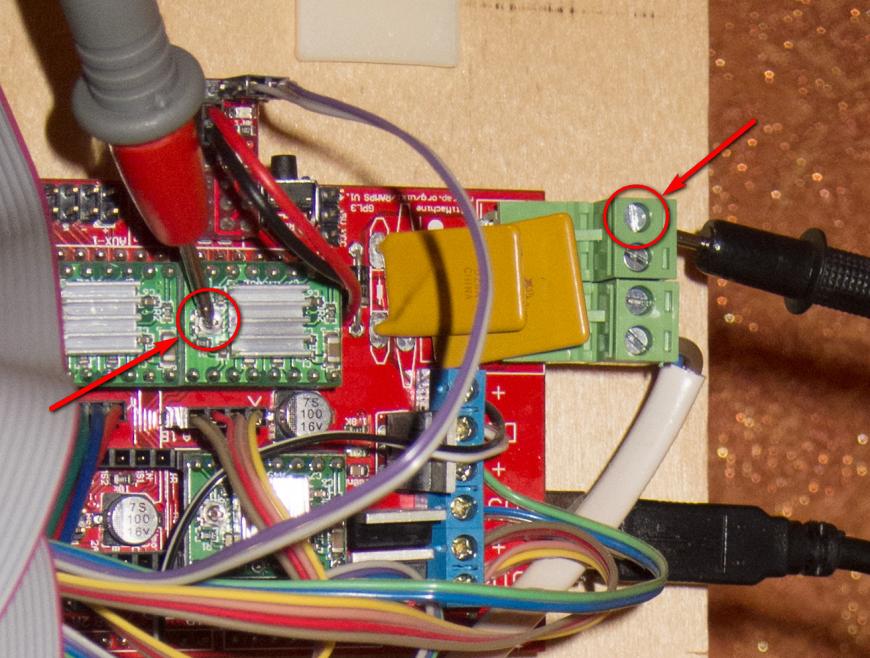
Ну и последнее. Вот я купил двигатель, а дальше что? Как на нём правильно настроит ток? А всё очень просто, я уже поверхностно описывал этот процесс в одном из своих постов. Нам понадобится мультиметр, отвёртка и немного математики. Настройка тока производится методом кручения подсроечника на драйвере и снятия контрольного напряжения. Напряжение можно снимать — как на картинке.
А дальше считаем по формуле, какое контрольное напряжение (Vr) нам надо выставить. Формула различается для разных драйверов.
Для A4988:
Vr = Номинальный ток / 2,5
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 .5 = 0.68V
Для DRV8825:
Vr = Номинальный ток / 2
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 = 0,85V
Шаговый двигатель или сервопривод: как выбрать
Приводный двигатель является одним из важнейших элементов ЧПУ, поэтому к его выбору следует подходить со всей серьёзностью. Причём сложность, как правило, состоит не в выборе конкретной модели, а в подборе типа двигателя: недорогого и простого шагового, или же более совершенного, но и более дорогого, сервопривода.
Следует сразу оговориться, что под понятием «сервопривод» в данном контексте подразумевается бесколлекторный двигатель с обратной связью и возможностью управления, тогда как в общем и целом сервоприводом можно назвать любой тип двигателя, оснащённый управляющим устройством и имеющий функцию обратной связи. Чтобы определиться, шаговый двигатель или сервопривод наилучшим образом подойдёт для использования в каждой конкретной ситуации, важно знать все плюсы и минусы каждого из этих типов движущих элементов.
Плюсы и минусы шаговых двигателей
Первым и, пожалуй, одним из важнейших преимуществ шаговых двигателей является их доступная стоимость. Даже крупногабаритные модели ШД, в сравнении с бесколлекторными сервоприводами, стоят на порядок дешевле. Именно этот фактор зачастую становится решающим при выборе типа двигателя для ЧПУ. Кроме того, шаговые двигатели, отличающиеся простотой конструкции, не требуют дорогостоящего обслуживания и просты как в использовании, так и в настройке: первичные настройки задаются с помощью обычного контроллера, после запуска оборудования шаговый двигатель работает в стабильном режиме. Дополнительным преимуществом шаговых двигателей является более стабильная, чем у сервоприводов, работа в режиме удержания, обеспечивающаяся дискретностью ШД.
Однако у шаговых двигателей есть и ряд недостатков. Так, для крупных станков (с массой портала свыше 100кг, или же рабочим полем более 1м по каждой из осей) использовать шаговые двигатели не рекомендуется, так как они могут довольно сильно резонировать, что чревато пропуском шагов и падением точности. Кроме того, шаговые двигатели, из-за высокой инерции, не приспособлены к быстрым стартам и резким остановкам – работа ШД в таком режиме также может стать причиной пропуска шагов. Кроме того, в сравнение с сервоприводом шаговый двигатель отличается довольно высоким уровнем шума, что особенно ощутимо при работе на высоких скоростях.
Плюсы и минусы бесколлекторных сервоприводов
Основным преимуществом сервопривода является высокий конечный КПД, достигающийся благодаря возможности быстрого старта без потери точности. При этом сервоприводы практически не подвержены резонансу, что, несомненно, также является важным плюсом. Бесколлекторные серводвигатели, при грамотном управлении, легко справляются с кратковременными перегрузками и отличаются длительным роком службы. Кроме того, они практически бесшумны при работе в любых режимах.
Среди минусов серводвигателей, пожалуй, самым значимым, является очень высокая стоимость, объясняющаяся конструктивной сложностью механизмов такого типа. Также следует отметить, что тонкие настройки сервопривода довольно сложны – в большинстве случаев для того, чтобы настроить оптимальный режим работы бесколлекторного серводвигателя требуется специальное оборудование (внешние устройства с соответствующим интерфейсом) и знание программирования.
Купить шаговый двигатель или сервопривод в Stepmotor
Независимо от того, какому типу приводного двигателя – шаговому иди бесколлекторному – вы отдадите предпочтение, купить данные механизмы можно на нашем сайте. В каталоге Stepmotor представлен широкий выбор шаговых двигателей, бесколлекторных сервоприводов, энкодеров и прочих комплектующих для ЧПУ. Если у вас возникла необходимость купить шаговый двигатель или бесколлекторный сервопривод в наличии по доступной цене, внимательно ознакомьтесь с характеристиками интересующего вас устройства.
Как работают шаговые двигатели
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока