
Кабель ДПТ
Описание и расшифровка оптического кабеля ДПТ
Д — Тип центрального элемента: диэлектрический
П — Тип внутренней оболочки: полиэтиленовая
Т — Тип защитных покровов — с диэлектрическими периферийными силовыми элементами
Конструкция оптического кабеля ДПТ:
1. Центральный силовой элемент (ЦСЭ) — стеклопластиковый диэлектрический стержень.
2. Оптическое волокно.
3. Оптический модуль в оболочке из ПБТ, заполненный гидрофобным гелем.
4. Межмодульный гидрофобный гель.
5. Промежуточная оболочка из полимерного материала.
6. Упрочняющие элементы (ДПТа-арамидные нити /ДПТс- стеклонить).
7. Защитный шланг из полимерного материала.
8. ПЭТ-лента (для спецконстркции ДОТ)
9. Водоблокирующие нити
Варианты исполнения:
ДПТ-Н— оболочка кабеля изготавливается из полимерного материала, не распространяющего горение при одиночной прокладке (Класс ПРГО1).
ДПТ-нг(А)-HF — оболочка кабеля изготавливается из полимерного материала, не распространяющего горение при групповой прокладке, с низким дымовыделением, безгалогенного (Класс ПРГП1).
ДПТ в сухом исполнении — межмодульный гидрофобный заполнитель заменен сухими водоблокирующими материалами.
ДОТ — кабель облегченной конструкции (без промежуточной оболочки).
ДОТа / ДОТс в сухом исполнении— кабель облегченной конструкции (без промежуточной оболочки), межмодульный гидрофобный заполнитель заменен сухими водоблокирующими материалами.
Назначение оптического кабеля ДПТ:
Кабели применяются для подвеса на опорах воздушных линий связи, контактной сети и автоблокировки железных дорог, линий электропередач, столбах освещения, энергообъектах, между зданиями и сооружениями; для прокладки в грунт, в кабельной канализации, в трубах (включая метод пневмопрокладки), в блоках, лотках, в тоннелях, в коллекторах, по мостам и эстакадам, внутри зданий и сооружений.
Технические характеристики оптического кабеля ДПТ:
Рабочая температура: -50°С…+50°С
Температура монтажа: -10°С…+50°С
Температура транспортировки и хранения: -50°С…+50°С
Растягивающая нагрузка — 3,5-35,0 кН
Минимальный радиус изгиба оптического волокна — не менее 3 мм (в течение 10 мин)
Минимальный радиус изгиба не менее 20 диаметров кабеля
Срок службы — 25 лет
«ДПТ» — Аббревиатура.рф — все сокращения России!
дальнобойная планирующая торпеда
детальная планировка территории
детальный план территории
договор простого товарищества
Демократическая партия Таиланда
детектор полупроводниковый тонкоплёночный
двигатель постоянного тока
Демократическая партия Таджикистана
Донецкий политехнический техникум
Демократическая партия Туркменистана
документация по планировке территории
дочерние продукты торона
Транслитерация: DPT
Devlet Planlama Teskilatiперевод: Организация Государственного Планирования
Doctor of Physical Therapy
перевод: Врач лечебной физкультуры
Diphtheria, Pertussis, and Tetanus
перевод: Дифтерии, коклюша и столбняка
Dynamic Packet Transport
перевод: Динамического Пакетного Транспорта
Dial Pulse Terminate
перевод: Циферблат Пульса Прекратить
Double Protective Treatment
перевод: Двойной Защитный Лечение
Demand for Public Transport
перевод: Спрос на общественный транспорт
Defensive Petroleum Transfer
перевод: Оборонительные Передачи Нефти
Department of Particle Theory
перевод: Кафедра теории элементарных частиц
Dirty Page Table
Doctorate in Physical Therapy
перевод: Докторскую степень в физической терапии
day past transfer
перевод: день последние передачи
distance per tile
перевод: расстояние за плитку
Department of Parking and Traffic
перевод: Департамент парковка и трафик
Physical Therapy
перевод: Физиотерапия
Department of Physical Therapy
перевод: Кафедра физической терапии
Diphtheria Pertussis Trichomonas
перевод: Дифтерия Коклюш Трихомонады
Dead pixel tester
перевод: Мертвый пиксель тестер
Daily Pwn Team
перевод: Ежедневно Команда ПВН
Doctorate of Physical Therapy
перевод: Доктора физической терапии
Divinely Professional Therapist
перевод: Божественно Профессиональный Массажист
Dirty Pretty Things
перевод: Грязные Прелести
Physical
перевод: Физические
diphtheria pertussis and tetanus
перевод: дифтерии коклюша и столбняка
Diphtheria Pertussis Tetanus
перевод: Дифтерии Коклюша Столбняка
Видео по этой аббревиатуре:
Свободные доменные имена в зоне РФе:
ДптСервис, Дпт24, Дпт-Строй, Дпт-Дом, ДптМаркет, ДптДом, ДптЦентр, ДптОнлайн, Новый-Дпт, Дпт-Новый, ДптСтрой, Дпт-Сервис, Дпт-Центр, Дпт-24, Дпт-Маркет, Дпт-Онлайн
ДПТ

Назначение:
Кабели применяются для подвеса на опорах воздушных линий связи, контактной сети железных дорог, линий электропередач, в том числе при особо высоких требованиях по устойчивости к внешним электромагнитным воздействиям.

Конструкция:
- Центральный силовой элемент (ЦСЭ) — стеклопластиковый диэлектрический стержень.
- Оптическое волокно.
- Оптический модуль в оболочке из ПБТ, заполненный гидрофобным гелем.
- Межмодульный гидрофобный гель.
- Промежуточная оболочка из полимерного материала.
- Упрочняющие элементы (арамидные нити / стеклонити).
- Защитный шланг из полимерного материала.
- ПЭТ-лента (для спецконстркции ДОТ)
Спецконструкции:
ДПТ-Н — оболочка кабеля изготавливается из полимерного материала, не распространяющего горение, не содержащего галогенов с низким дымовыделением.
ДПТ-нг — оболочка кабеля изготавливается из полимерного материала, не распространяющего горение при групповой прокладке, не содержащего галогенов с низким дымовыделением.
ДПТ-Э — оболочка кабеля изготавливается из трекингостойкого полимерного материала.
ДПТ в сухом исполнении — для вертикальной прокладки и удобства монтажа кабелей (гидрофобный заполнитель в сердечнике заменен сухими водоблокирующими материалами).
ДОТ — кабель облегченной конструкции (без промежуточной оболочки).

Изготавливается по ТУ 3587-001-88083123-2010.
Параметры эксплуатации:
| Рабочая температура | -60°С…+70°С |
| Температура монтажа | -30°С…+50°С |
| Температура транспортировки и хранения | -50°С…+50°С |
| Минимальный радиус изгиба | не менее 20 диаметров кабеля |
| Срок службы | 25 лет |
| Срок гарантийной эксплуатации | 2 года |
| Минимальный радиус изгиба оптического волокна | не менее 3 мм (в течение 10 мин) |
Основные технические параметры ДПТа
| Кол-во ОВ в кабеле | Допустимое растягивающее усилие, кН | Диаметр кабеля, мм | Вес кабеля, кг/км | Радиус изгиба, мм | Раздавливающая нагрузка, кН/см |
|---|---|---|---|---|---|
| до 4 | 3,5 | 12,2 | 113 | 244 | 0,3 |
| до 48 | 12,6 | 119 | 252 | ||
| до 72 | 13,4 | 134 | 268 | ||
| до 96 | 14,2 | 151 | 284 | ||
| до 144 | 16,8 | 208 | 336 | ||
| до 192 | 19,4 | 276 | 388 | ||
| до 4 | 6 | 12,3 | 117 | 246 | 0,3 |
| до 48 | 12,7 | 123 | 254 | ||
| до 72 | 13,5 | 138 | 270 | ||
| до 96 | 14,3 | 155 | 286 | ||
| до 144 | 16,9 | 212 | 338 | ||
| до 192 | 19,5 | 280 | 390 | ||
| до 4 | 8 | 12,5 | 121 | 250 | 0,3 |
| до 48 | 12,9 | 127 | 258 | ||
| до 72 | 13,6 | 141 | 272 | ||
| до 96 | 14,4 | 159 | 288 | ||
| до 144 | 17,0 | 216 | 340 | ||
| до 192 | 19,6 | 283 | 392 | ||
| до 4 | 10 | 13,2 | 137 | 264 | 0,3 |
| до 48 | 13,6 | 143 | 272 | ||
| до 72 | 14,3 | 156 | 286 | ||
| до 96 | 15,2 | 175 | 304 | ||
| до 144 | 17,7 | 233 | 354 | ||
| до 192 | 20,2 | 304,1 | 404 | ||
| до 4 | 12 | 13,3 | 140 | 266 | 0,3 |
| до 48 | 13,7 | 147 | 274 | ||
| до 72 | 14,4 | 161 | 288 | ||
| до 96 | 15,3 | 182 | 306 | ||
| до 144 | 17,8 | 241 | 356 | ||
| до 192 | 20,3 | 307,9 | 406 | ||
| до 4 | 15 | 13,5 | 145 | 270 | 0,3 |
| до 48 | 13,9 | 151 | 278 | ||
| до 72 | 14,6 | 164 | 291 | ||
| до 96 | 15,5 | 186 | 310 | ||
| до 144 | 17,9 | 243 | 358 | ||
| до 192 | 20,4 | 313,6 | 408 | ||
| до 4 | 20 | 14,5 | 159 | 290 | 0,3 |
| до 48 | 14,9 | 164 | 298 | ||
| до 72 | 15,6 | 177 | 312 | ||
| до 96 | 16,6 | 201 | 332 | ||
| до 144 | 19,2 | 259 | 384 | ||
| до 192 | 21,8 | 330,1 | 436 | ||
| до 4 | 25 | 15,2 | 170 | 304 | 0,3 |
| до 48 | 15,6 | 177 | 312 | ||
| до 72 | 16,3 | 190 | 326 | ||
| до 96 | 17,4 | 216 | 348 | ||
| до 144 | 20,0 | 276 | 400 | ||
| до 192 | 22,7 | 343,8 | 454 | ||
| до 4 | 30 | 15,6 | 178 | 312 | 0,3 |
| до 48 | 15,9 | 184 | 318 | ||
| до 72 | 16,6 | 197 | 332 | ||
| до 96 | 17,7 | 224 | 354 | ||
| до 144 | 20,3 | 282 | 406 | ||
| до 192 | 23,0 | 353,4 | 460 |
Основные технические параметры ДПТс
| Кол-во ОВ в кабеле | Допустимое растягивающее усилие, кН | Диаметр кабеля, мм | Вес кабеля, кг/км | Радиус изгиба, мм | Раздавливающая нагрузка, кН/см |
|---|---|---|---|---|---|
| до 4 | 3,5 | 12,3 | 117 | 246 | 0,3 |
| до 48 | 12,7 | 122 | 254 | ||
| до 72 | 13,5 | 137 | 270 | ||
| до 96 | 14,4 | 157 | 288 | ||
| до 144 | 16,9 | 214 | 338 | ||
| до 192 | 19,5 | 282 | 390 | ||
| до 4 | 6 | 12,8 | 128 | 256 | 0,3 |
| до 48 | 13,1 | 133 | 262 | ||
| до 72 | 13,8 | 148 | 276 | ||
| до 96 | 14,7 | 168 | 294 | ||
| до 144 | 17,2 | 225 | 344 | ||
| до 192 | 19,8 | 292 | 396 | ||
| до 4 | 7 | 12,9 | 132 | 258 | 0,3 |
| до 48 | 13,2 | 138 | 264 | ||
| до 72 | 13,9 | 151 | 278 | ||
| до 96 | 14,8 | 172 | 296 | ||
| до 144 | 17,3 | 229 | 346 | ||
| до 192 | 19,9 | 297 | 398 | ||
| до 4 | 8 | 13,0 | 138 | 260 | 0,3 |
| до 48 | 13,4 | 142 | 268 | ||
| до 72 | 14,1 | 156 | 282 | ||
| до 96 | 14,9 | 175 | 298 | ||
| до 144 | 17,4 | 231 | 348 | ||
| до 192 | 19,9 | 300 | 398 | ||
| до 4 | 10 | 13,9 | 157 | 278 | 0,3 |
| до 48 | 14,2 | 161 | 284 | ||
| до 72 | 14,9 | 176 | 298 | ||
| до 96 | 15,8 | 197 | 316 | ||
| до 144 | 18,2 | 255 | 364 | ||
| до 192 | 20,7 | 326,7 | 414 |
Основные технические параметры ДОТа
| Кол-во ОВ в кабеле | Допустимое растягивающее усилие, кН | Диаметр кабеля, мм | Вес кабеля, кг/км | Радиус изгиба, мм | Раздавливающая нагрузка, кН/см |
|---|---|---|---|---|---|
| до 4 | 3,5 | 10,6 | 88,8 | 212 | 0,3 |
| до 48 | 11,0 | 94,6 | 220 | ||
| до 72 | 11,8 | 108,1 | 236 | ||
| до 96 | 12,6 | 122,9 | 252 | ||
| до 144 | 15,2 | 174,9 | 304 | ||
| до 192 | 17,8 | 237,5 | 356 | ||
| до 4 | 6 | 10,8 | 93,3 | 216 | 0,3 |
| до 48 | 11,2 | 99,0 | 224 | ||
| до 72 | 12,0 | 111,5 | 240 | ||
| до 96 | 12,8 | 127,2 | 256 | ||
| до 144 | 15,3 | 178,9 | 306 | ||
| до 192 | 17,9 | 241,3 | 358 | ||
| до 4 | 8 | 10,9 | 97,7 | 218 | 0,3 |
| до 48 | 11,3 | 102,6 | 226 | ||
| до 72 | 12,0 | 114,5 | 240 | ||
| до 96 | 12,9 | 131,4 | 258 | ||
| до 144 | 15,4 | 182,1 | 308 | ||
| до 192 | 18,0 | 244,4 | 360 |
Основные технические параметры ДОТа (в сухом исполнении)
| Кол-во ОВ в кабеле | Допустимое растягивающее усилие, кН | Диаметр кабеля, мм | Вес кабеля, кг/км | Радиус изгиба, мм | Раздавливающая нагрузка, кН/см |
|---|---|---|---|---|---|
| до 4 | 3,5 | 10,6 | 83,6 | 212 | 0,3 |
| до 48 | 11,0 | 88,5 | 220 | ||
| до 72 | 11,8 | 101,4 | 236 | ||
| до 96 | 12,6 | 114,7 | 252 | ||
| до 144 | 15,2 | 164,6 | 304 | ||
| до 192 | 17,8 | 224,8 | 356 | ||
| до 4 | 6 | 10,8 | 88,1 | 216 | 0,3 |
| до 48 | 11,2 | 92,9 | 224 | ||
| до 72 | 11,9 | 104,9 | 238 | ||
| до 96 | 12,7 | 118,9 | 254 | ||
| до 144 | 15,3 | 168,6 | 306 | ||
| до 192 | 17,9 | 228,7 | 358 | ||
| до 4 | 8 | 11,0 | 92,5 | 218 | 0,3 |
| до 48 | 11,3 | 96,4 | 226 | ||
| до 72 | 12,0 | 107,9 | 240 | ||
| до 96 | 12,9 | 123,1 | 258 | ||
| до 144 | 15,4 | 171,8 | 308 | ||
| до 192 | 18,0 | 231,8 | 360 |
Основные технические параметры ДОТс
| Кол-во ОВ в кабеле | Допустимое растягивающее усилие, кН | Диаметр кабеля, мм | Вес кабеля, кг/км | Радиус изгиба, мм | Раздавливающая нагрузка, кН/см |
|---|---|---|---|---|---|
| до 4 | 3,5 | 10,8 | 93,4 | 216 | 0,3 |
| до 48 | 11,1 | 97,5 | 222 | ||
| до 72 | 11,9 | 110,9 | 238 | ||
| до 96 | 12,8 | 129 | 256 | ||
| до 144 | 15,4 | 180,6 | 308 | ||
| до 192 | 18,0 | 243 | 360 | ||
| до 4 | 6 | 11,3 | 105,3 | 226 | 0,3 |
| до 48 | 11,6 | 109,3 | 232 | ||
| до 72 | 12,4 | 122,4 | 248 | ||
| до 96 | 13,2 | 140,2 | 264 | ||
| до 144 | 15,7 | 191,4 | 314 | ||
| до 192 | 18,2 | 253,5 | 364 | ||
| до 4 | 7 | 11,5 | 108,7 | 230 | 0,3 |
| до 48 | 11,8 | 114,3 | 236 | ||
| до 72 | 12,5 | 125,7 | 250 | ||
| до 96 | 13,4 | 145 | 268 | ||
| до 144 | 15,8 | 196 | 316 | ||
| до 192 | 18,3 | 258 | 366 | ||
| до 4 | 8 | 11,7 | 113,7 | 234 | 0,3 |
| до 48 | 11,9 | 117,6 | 238 | ||
| до 72 | 12,7 | 130,6 | 254 | ||
| до 96 | 13,5 | 148,2 | 270 | ||
| до 144 | 15,9 | 199,1 | 318 | ||
| до 192 | 18,4 | 261,0 | 368 |
Рекомендуемые расстояния для подвеса кабеля
На сайте нашей компании вы найдете программу для расчета необходимых характеристик кабеля для заданных условий монтажа и эксплуатации (расстояний между опорами, стрелы провиса, условий окружающей среды). Для более подробной консультации вы всегда можете обратиться к нашим специалистам по тел.: (342) 211-41-41.
Скачать инструкцию по монтажу и эксплуатации кабеля марки ДПТ.
Спецификации
По желанию заказчика, ООО «Инкаб» может предоставить спецификацию на любую номенклатуру оптического кабеля.
В связи с совершенствованием конструкций и технологий, ООО «Инкаб» оставляет за собой право корректировать данные, указанные в спецификациях без предварительного уведомления.
Сертификаты
Сертификат пожарной безопасности №ССПБ.RU.ОП070.В.00120 (марки ДПТ-Н, ТПТ-Н)
Сертификат пожарной безопасности (марки ДПТа-Н) № C-RU.ПБ18.В.00101 от 26.09.2011
Сертификат пожарной безопасности (марки ДПТа-нг-HF, ДПТс-нг-HF, ДОТа-нг-HF, ДОТ-нг-HF) № C-RU.ПБ18.В.00146 от 27.03.2012
Заключение о соответствии требованиям ФСК.
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?
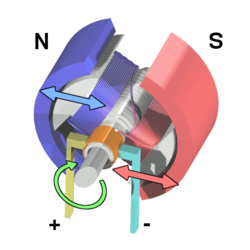
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора, 
 — длина рабочей части витка обмотки [м],
— длина рабочей части витка обмотки [м],  — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад], 
 — время [сек].
— время [сек].Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:

Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):


Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
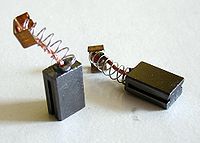
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора  между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные
между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные  , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
 Рисунок 1
Рисунок 1Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

откуда:

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
ДПТ последовательного возбуждения | Электрикам
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = kф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:


Формула частоты вращения примет вид
 . (29.15)
. (29.15)
На рис. 29.9, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.

Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
 , (29.16)
, (29.16)
где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rрг . Кроме того, реостат Rрг , рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).
![clip_image002[1]](/800/600/https/electrikam.com/wp-content/uploads/2014/12/clip_image0021_thumb.jpg "clip_image002[1]")
Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
![clip_image002[6]](/800/600/https/electrikam.com/wp-content/uploads/2014/12/clip_image0026_thumb.gif "clip_image002[6]") .
.
Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 29.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
![clip_image002[3]](/800/600/https/electrikam.com/wp-content/uploads/2014/12/clip_image0023_thumb.jpg "clip_image002[3]")
Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения.
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?
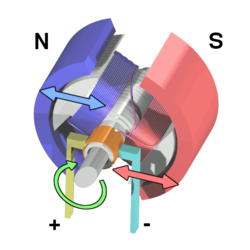
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А],  — длина рабочей части витка обмотки [м],
— длина рабочей части витка обмотки [м],  — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек],  — время [сек].
— время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):

Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
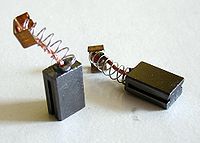
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора  между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные
между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные  , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.