Физические основы механики
Если какое-либо тело привести во вращение относительно произвольной оси и затем предоставить самому себе, то положение оси вращения в пространстве, вообще говоря, изменится: ось будет либо поворачиваться, либо перемещаться относительно инерциальной системы отсчета. Для того, чтобы произвольно взятую ось удерживать в неизменном положении, к ней необходимо приложить определенные силы.
Ось вращения тела, положение которой в пространстве сохраняется без приложения извне каких-либо сил, называется свободной осью тела.
Можно показать, что существуют по крайне мере три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями. Такие оси называются главными осями инерции тела.
Моменты инерции тела относительно главных осей называются главными моментами инерции.
Для тел, обладающих осевой симметрией (например, у однородного цилиндра), одна из главных осей совпадает с осью симметрии, а две любые оси, перпендикулярные к оси симметрии и друг другу и проходящие через центр масс тела, также являются главными (рис. 7.15). Моменты инерции относительно двух последних осей равны друг другу, а момент инерции относительно оси симметрии отличен от них
7.15). Моменты инерции относительно двух последних осей равны друг другу, а момент инерции относительно оси симметрии отличен от них
Такое тело называется симметричным волчком.
Рис. 7.15. Главные оси однородного цилиндра
У тела с центральной симметрией (например, у однородного шара) любые три взаимно перпендикулярные оси, проходящие через центр симметрии, являются главными. Для них
Такие тела называются шаровыми волчками. Любая ось шарового волчка, проходящая через центр симметрии, является главной (а, значит, и свободной).
В общем случае главные моменты инерции тела различны, то есть
Такое тело называется асимметричным волчком. Примером асимметричного волчка может служить однородный прямоугольный параллелепипед (рис. 7.16).
Рис. 7.16. Главные оси однородного параллелепипеда
При «почти» свободном вращении на тело могут действовать малые возмущения. Если при таких возмущениях ось вращения мало изменяет свое положение, то вращение называется устойчивым. В противном случае говорят о неустойчивом вращении.
В противном случае говорят о неустойчивом вращении.
Пусть для асимметричного волчка для определенности имеет место следующее соотношение между главными моментами инерции:
Можно показать, что вращение вокруг осей 1 и 3 (то есть осей с максимальными и минимальными моментами инерции) будет устойчивым, а вокруг оси 2 (с промежуточным по величине моментом инерции) — неустойчивым.
Видео 7.4. Устойчивость полета в воздухе прямоугольного параллелепипеда
Пусть тело вращается вокруг одной из главных осей, например, вокруг оси z. Тогда вектор угловой скорости имеет вид
Компоненты момента импульса тела будут равны
или в векторном виде
То есть этом случае момент импульса параллелен оси вращения
Видео 7.5. Устойчивое вращение стержня, диска и цепочки вокруг той свободной оси, которой соответствует максимальный момент инерции
Если тело вращается в отсутствие внешних сил (), то согласно закону сохранения момента импульса в этом случае
В общем случае вектор угловой скорости вращается вокруг момента импульса. Однако если ось вращения совпадает с одной из главных осей, то ось вращения сохраняет свою ориентацию в пространстве в отсутствие внешних сил.
Однако если ось вращения совпадает с одной из главных осей, то ось вращения сохраняет свою ориентацию в пространстве в отсутствие внешних сил.
Определение моментов инерции твердых тел методом крутильных колебаний
Citation previewМинистерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Техническая физика»
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ Методические указания к лабораторной работе
Минск 2009
Министерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Техническая физика»
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ Методические указания к лабораторной работе
Минск 2009
УДК 531.231 (076.5) ББК 22.213 я7 О 62
Составители: А.Г. Головейко, И.К. Султанова, С.И. Шеденков Рецензент доцент кафедры физики, канд. физ.-мат. наук Н.П. Юркевич В методических указаниях рассмотрены основные вопросы динамики вращательного движения твердого тела, дано подробное описание величин, характеризующих вращательное движение, рассмотрены вопросы экспериментального определения моментов инерции твердых тел.
© БНТУ, 2009
Введение Вращательное движение твердых тел встречается и используется в технике повсеместно. Перечень применения вращательного движения в разнообразных узлах машин и приборов очень велик. Это могут быть маховики, валы, шкивы, турбины, роторы, шпиндели, центрифуги, сепараторы, колеса транспортных средств, компакт-диски в компьютерах и т.д. Важнейшей величиной, которая определяет вращение таких тел, является их момент инерции. Подобно тому, как без данных о массе тела невозможно рассчитать его поступательное движение, так и без данных о моменте инерции тела невозможно рассчитать его вращательное движение. Как известно при поступательном движении тела его ускорение обратно пропорционально массе т. При вращательном движении тела его угловое ускорение обратно пропорционально не массе, а моменту инерции J. Таким образом m и J выражают инертные свойства одного и того же тела, только при поступательном движении эти свойства определяются массой, а при вращательном движении — моментом инерции. Важно подчеркнуть, что если масса данного тела однозначна, то момент инерции этого же тела может иметь самые различные значения в зависимости от выбора оси вращения. Поэтому нельзя утверждать, что «тело обладает моментом инерции J» без добавления слов «относительно данной оси вращения», поскольку при иной оси вращения момент инерции примет другое значение. Таких возможных значений столько, сколько возможных осей вращения, т. е. бесконечно много. Однако для избранной оси вращения момент инерции тела является вполне конкретной однозначной величиной. Математический расчет момента инерции выполним только для тел простой геометрической формы, что недостаточно для решения реальных технических задач. Поэтому экспериментальное определение момента инерции является важной инженерной задачей. В данной работе Вам предлагается экспериментально определить момент инерции тела сложной геометрической формы методом крутильных колебаний.
Важно подчеркнуть, что если масса данного тела однозначна, то момент инерции этого же тела может иметь самые различные значения в зависимости от выбора оси вращения. Поэтому нельзя утверждать, что «тело обладает моментом инерции J» без добавления слов «относительно данной оси вращения», поскольку при иной оси вращения момент инерции примет другое значение. Таких возможных значений столько, сколько возможных осей вращения, т. е. бесконечно много. Однако для избранной оси вращения момент инерции тела является вполне конкретной однозначной величиной. Математический расчет момента инерции выполним только для тел простой геометрической формы, что недостаточно для решения реальных технических задач. Поэтому экспериментальное определение момента инерции является важной инженерной задачей. В данной работе Вам предлагается экспериментально определить момент инерции тела сложной геометрической формы методом крутильных колебаний.
3
Цель работы 1. Ознакомиться с основными характеристиками тела при вращательном движении. 2. Определить момент инерции тела сложной геометрической формы с помощью крутильного маятника. Порядок теоретической подготовки к выполнению работы Изучить и законспектировать в тетрадь ответы на контрольные вопросы. Приборы и принадлежности 1. Крутильный маятник. 2. Секундомер. 3. Эталонное и исследуемое тело. Содержание отчета по лабораторной работе 1. 2. 3. 4. 5. 6. 7. 8.
2. Определить момент инерции тела сложной геометрической формы с помощью крутильного маятника. Порядок теоретической подготовки к выполнению работы Изучить и законспектировать в тетрадь ответы на контрольные вопросы. Приборы и принадлежности 1. Крутильный маятник. 2. Секундомер. 3. Эталонное и исследуемое тело. Содержание отчета по лабораторной работе 1. 2. 3. 4. 5. 6. 7. 8.
Цель работы. Приборы и принадлежности к работе. Схему лабораторной установки. Физическую модель. Математическая модель. Таблица результатов измерений. Результаты расчётов и расчет погрешностей. Вывод. Момент инерции
Твердое тело можно рассматривать как систему материальных точек, расстояние между которыми неизменно. Вращательным движением твердого тела называют такое движение, при котором все точки тела описывают окружности вокруг оси его вращения. Если тело может вращаться вокруг неподвижной оси, то изменение его движения зависит от действующего на тело момента сил. Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку приложения силы В, на силу F (рис. 1): 4
1): 4
M rF , где M – псевдовектор, направление которого совпадает с направлением поступательного движения правого винта при его вращении от r к F.
Рис. 1
Модуль момента силы М = F r sin α = Fl, где l = r sin α – кратчайшее расстояние между линией действия силы и точкой О, называемое плечом силы. Моментом силы относительно неподвижной оси x называется скалярная величина Mx, равная проекции на эту ось вектора M момента силы, определенного относительно произвольной точки О данной оси x. Причем значение Mx не зависит от выбора положения точки О. Величина J = m r2 численно равная произведению массы материальной точки на квадрат расстояния до оси вращения, называется моментом инерции материальной точки. Для твердого тела момент инерции выражается суммой моментов инерции всех материальных точек, образующих тело: J m1r12 m2 r22 … mn rn2 J1 J 2 … J n .
(1) 5
При вращательном движении твердого тела вокруг неподвижной оси его угловое ускорение ε прямо пропорционально действующему на тело моменту сил М и обратно пропорционально его моменту инерции J относительно той же оси
M J
.
Так выражается основной закон динамики вращения твердого тела, когда его ось вращения не меняет своей ориентации и своего положения в пространстве. Этот закон является исходным во всех расчетах вращательного движения, но расчеты не могут быть выполнены без данных о моменте инерции твердого тела. Момент инерции твердого тела относительно данной оси является мерой инертности тела при его вращательном движении. Вращающееся твердое тело обладает кинетической энергией. Если ось вращения неподвижна, то кинетическая энергия определяется через угловую скорость вращения ω и момент инерции тела J относительно данной оси: W=
J 2 2
.
Выражение (1) определяет физическое содержание момента инерции, но оно не пригодно для вычисления этой величины. Необходимо от суммы с большим числом слагаемых перейти к интегралу. Для этого твердое тело можно представить состоящим из элементарных масс dm, каждая из которых обладает своим элементарным моментом инерции dJ = r2dm = r2ρdV относительно данной оси вращения, так что
J dJ r 2 dm r 2 dV , где ρ – плотность тела, r – расстояние элементарной массы до заданной оси вращения, а J – момент инерции всего тела относительно этой же оси. Конкретное интегрирование требует дальнейшего 6
Конкретное интегрирование требует дальнейшего 6
преобразования исходного интеграла путем перехода к декартовой системе координат x, y, z. Но результат такого преобразования зависит от того, где выбрать начало координат и как направить оси x, y, z по отношению к твердому телу. Cамый простой вариант получается в том случае, когда за начало координат избирается центр масс твердого тела, а оси координат х у z направляются по его главным центральным осям. Центральными называются все оси, проходящие через центр масс твердого тела. Их бесконечно много, но среди них есть три главные и они при любой форме тела взаимно перпендикулярны, как оси координат х, y, z. Направление главных осей по отношению к твердому телу определяется не геометрическими, а физическими условиями. Относительно одной из них момент инерции тела должен быть максимальным, относительно другой – минимальным, относительно третьей – иметь промежуточное значение. Моменты инерции относительно этих осей называются главными центральными моментами инерции, соответственно Jx, Jy, Jz.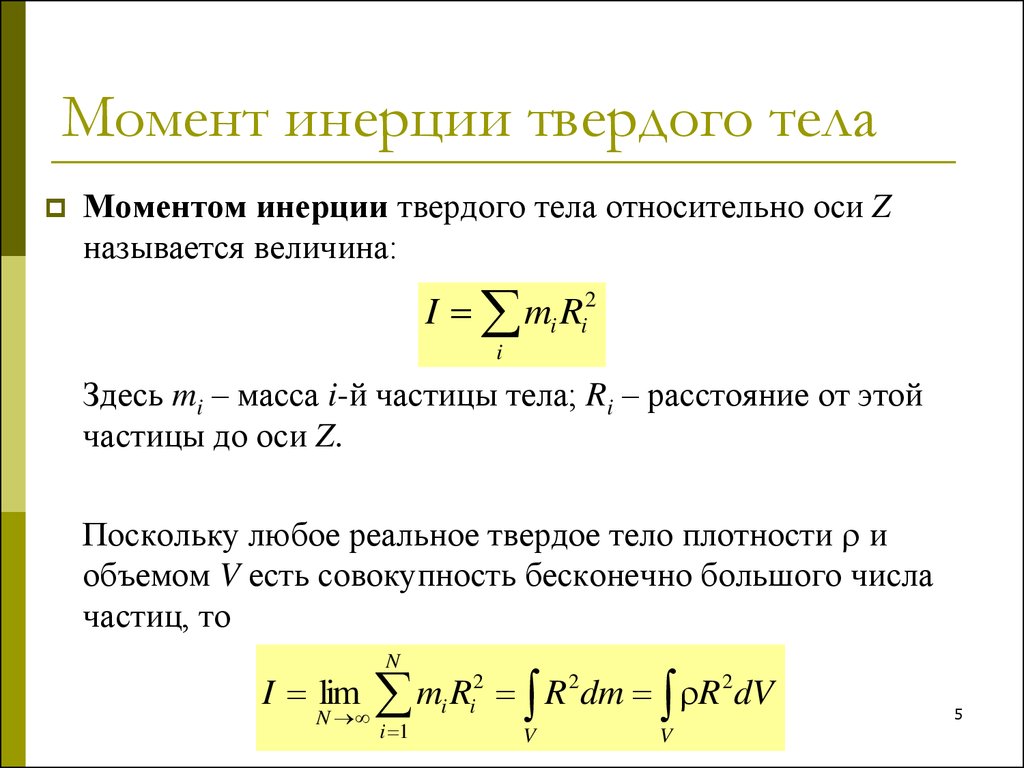 Часто геометрические оси симметрии твердого тела приближаются или даже совпадают с главными осями. Так, если тело имеет форму поверхности вращения, то его ось вращения совпадает с одной из главных осей. Но это возможно только при идеальной форме тела и при полной его однородности, что не всегда выполняется. Момент инерции Jс относительно любой центральной оси при ее ориентации под углами α, β и γ к главным центральным осям х, y и z (рис. 2) определяется простым уравнением Jc = Jx cos2a + Jy cos2β + Jz cos2γ.
Часто геометрические оси симметрии твердого тела приближаются или даже совпадают с главными осями. Так, если тело имеет форму поверхности вращения, то его ось вращения совпадает с одной из главных осей. Но это возможно только при идеальной форме тела и при полной его однородности, что не всегда выполняется. Момент инерции Jс относительно любой центральной оси при ее ориентации под углами α, β и γ к главным центральным осям х, y и z (рис. 2) определяется простым уравнением Jc = Jx cos2a + Jy cos2β + Jz cos2γ.
(2)
При этом главные центральные моменты инерции Jx, Jy, Jz находятся вычислением соответствующих интегралов. Однако такие интегралы берутся только в случае, когда тело имеет правильную простейшую геометрическую форму, например, форму цилиндра, диска, куба, параллелепипеда и т. п. В более сложных случаях Jx, Jy, Jz можно определить только экспериментально. Таким образом, достаточно знать главные центральные моменты инерции Jx, Jy, Jz и углы α, β, γ и момент инерции относительно любой центральной оси Jc находится простым вычислением по формуле (2). Момент инерции J относительно любой нецентральной оси, 7
Момент инерции J относительно любой нецентральной оси, 7
параллельной данной центральной оси, вычисляется согласно теореме Штейнера J = Jc + md2, где т – масса тела, a, d – расстояние между параллельными осями.
Рис. 2
На рис. 2 в качестве примера выделено три параллельные оси 1, 2 и 3, из которых ось 1 центральная (проходит через центр масс С), а две другие 2 и 3 — нецентральные (проходят через точки А и В). Согласно теореме Штейнера можно записать JA = Jc + ma2;
JB = Jc + mb2;
JB = JA + m(b – a)2.
Определение момента инерции твердого тела методом крутильных колебаний Крутильный маятник представлен функциональной схемой на рис. 3. Натянутая струна между базами А и В выполняет функции упругого элемента. При повороте рамки R (вместе с ее деталями Р, ZN, К) 8
струна закручивается на некоторый угол φ, чем создается деформация кручения с возбуждением момента сил М, действующего на возвращение рамки к положению равновесия. Именно этим возвращающим моментом сил и обеспечивается колебания крутильного маятника. Если деформация кручения струны не переходит в пластическую и остается строго упругой, то колебания крутильного маятника будут гармоническими и период колебаний будет постоянным и независящим от φ (при возникновении пластических деформаций колебания становятся ангармоническими).
Если деформация кручения струны не переходит в пластическую и остается строго упругой, то колебания крутильного маятника будут гармоническими и период колебаний будет постоянным и независящим от φ (при возникновении пластических деформаций колебания становятся ангармоническими).
Рис. 3
Движение крутильного маятника носит колебательный характер и подчиняется двум законам, один из которых связан с упругой деформацией кручения струны, а другой – с вращением крутильного маятника: M G
и
M J ,
(3)
где G – коэффициент упругости струны, φ – текущее угловое смещение маятника от положения равновесия, J – момент инерции маятника, ε – его угловое ускорение: 9
d 2 dt 2
.
Крутильные колебания маятника, как следует из (3), описываются следующим дифференциальным уравнением: J G 0
или
2 0 ,
(4)
где принято обозначение
2
G J
(5)
.
Уравнение такого вида соответствует гармоническому осциллятору и описывает его гармонические колебания, в данном случае колебания углового смещения маятника относительно его положения равновесия. Действительно, из решения дифференциального уравнения (4) следует, что колебания крутильного маятника являются гармоническими
Действительно, из решения дифференциального уравнения (4) следует, что колебания крутильного маятника являются гармоническими
0 Sin t , где φ0 – амплитуда углового смещения, равная начальному угловому отклонению маятника перед запуском колебаний, а ω – циклическая частота колебаний, связанная с периодом колебаний соотношением
2 T
.
(6)
Из совместного решения (5) и (6) вытекают простые формулы для определения J или G через экспериментально определяемый период колебаний крутильного маятника J
10
G 4 2
T 2
и
G
4 2 J T2
.
(7)
Из этих формул следует, что данных о периоде колебаний недостаточно для измерения величин J или G, т. к. при определении одной из них необходимы еще данные о другой. Тем не менее, в данной работе предлагается такая методика эксперимента с крутильным маятником, когда J определяется только через Т и сведения о величине G при этом не требуются. Сначала на «холостом ходу» определяется период колебаний базовой рамки крутильного маятника Т0. Затем базовая рамка заправляется эталонным телом с известным моментом инерции Jэ и снова определяется период колебаний маятника Т1 , когда его общий момент инерции складывается из J0 и Jэ. Наконец вместо эталонного тела базовая рамка заправляется исследуемым телом с неизвестным моментом инерции J и снова определяется период колебаний маятника Т2, когда его общий момент инерции складывается из Jo и J. Тогда в соответствии с (7) можно записать J0
Затем базовая рамка заправляется эталонным телом с известным моментом инерции Jэ и снова определяется период колебаний маятника Т1 , когда его общий момент инерции складывается из J0 и Jэ. Наконец вместо эталонного тела базовая рамка заправляется исследуемым телом с неизвестным моментом инерции J и снова определяется период колебаний маятника Т2, когда его общий момент инерции складывается из Jo и J. Тогда в соответствии с (7) можно записать J0
G 4
2
T02 ; J1 J 0 J э
G 4
2
T12 ; J 2 J 0 J
G 4 2
T22 .
Из совместного решения этих уравнений вытекают окончательные расчетные формулы для определения момента инерции: J0 Jэ
J Jэ
T02 T12 T02 T22 T02 T12 T02
;
.
В качестве эталонного твердого тела предлагается металлический цилиндр. После измерения массы и радиуса цилиндра, его момент инерции вычисляется по формуле Jэ
1 2
mR 2 .
При этом предполагается такое закрепление цилиндра в базовой рамке, когда его геометрическая ось совпадает с осью вращения рамки. 11
11
Порядок выполнения работы 1. Измерить массу и радиус эталонного тела (цилиндра) с помощью рычажных весов и штангенциркуля. Данные занести в табл. 1. Таблица 1 m,10-3кг
Δ m, 10-3кг 0,05
R,10-2м
ΔR, 10-2м 0,05
2. По данным табл. 1 рассчитать момент инерции эталонного тела и ошибки его определения: Jэ
1 2
mR 2 ;
J э Jэ
m m
2
R R
;
J э J э .
э
3. Включить секундомер, нажав кнопку «Сеть». Кнопки «Сбр», «Пуск», «Стоп» должны быть отжаты. 4. Повернуть базовую рамку до касания контактной площадки с электромагнитом. Запустить колебания крутильного маятника, нажав кнопку «Пуск». 5. Измерить время десяти полных колебаний t0. Для этого необходимо нажать кнопку «Стоп» в момент, когда показание счетчика периодов колебаний будет равно девяти. Измерения повторить не менее трех раз. Данные занести в табл. 2. 6. Рассчитать значение периода колебаний базовой рамки T0 для трех случаев: T0
t0 n
.
Найти среднее значение T0 . 7. Заправить базовую рамку эталонным телом. Повторить измерения по п.п. 3–6 и определить значение периода колебаний базовой рамки с эталонным телом Т1. Все данные занести в табл. 2. 8. Заправить базовую рамку исследуемым телом. Определить период колебаний базовой рамки с исследуемым телом T2 (см. п.п. 3–6). Данные занести в табл. 2 12
Таблица 2 Колебания маятника Колебания маятника Колебания маятника без эталонного тела с эталонным телом с исследуемым телом to, с n Т0, с ΔТ,с t1, с n Т1, с ΔТ1,с t2, с n Т2, с ΔТ2,с 10 10 10 10 10 10 10 10 10 T0 = ∆T0 = T1 = ∆T1 = T2 = ∆T2 =
9. По данным табл. 2 рассчитать момент инерции базовой рамки крутильного маятника и ошибки его определения: J0 Jэ
0
J 0 J0
J э Jэ
T02 T12 T02
2T0 T0
2
, T1T1 T0 T0
T
2
1
T02
,
J 0 0 J 0 , J э
э берем из п. 2. Jэ 10. По данным табл. 2 рассчитать момент инерции исследуемого тела и ошибки его определения:
где значение
J Jэ
J J
J э Jэ
2
T22 T02 T12 T02
,
T2 T2 T0 T0
T
2 2
T
2 0
2
T1T1 T0 T0
T
1
2
T02
,
J J . 11. Записать окончательный результат с учетом погрешностей. 13
11. Записать окончательный результат с учетом погрешностей. 13
Литература 1. Сивухин, Д.В. Общий курс физики: в 2 т. / Д.В. Сивухин. – М.: Наука,1989. – Т.1, гл. 5, §§ 32–35. 2. Детлаф, А.А. Курс физики: / А.А. Детлаф, Б.М. Яворский. – М.: Высшая школа, 1989. 3. Савельев, И.В. Курс общей физики в 2 т. / И.В. Савельев. – М.: Наука, 1977. – Т.1, §§ 38, 39. Контрольные вопросы 1. Что такое момент инерции материальной точки и твердого тела относительно данной оси вращения? 2. Что такое центральные и главные центральные оси вращения и по каким критериям определяется направление главных центральных осей по отношению к твердому телу? 3. Как связан с главными центральными моментами инерции момент инерции твердого тела относительно любой центральной оси? 4. Как между собой связаны моменты инерции твердого тела относительно двух параллельных осей? Теорема Штейнера? 5. Основной закон динамики вращения твердого тела? 6. Какова связь между моментом упругих сил и углом закручивания при деформации кручения упругого элемента? 7. При каких условиях колебания крутильного маятника будут гармоническими и при каких – ангармоническими?
При каких условиях колебания крутильного маятника будут гармоническими и при каких – ангармоническими?
14
Учебное издание ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ Методические указания к лабораторной работе Составители: ГОЛОВЕЙКО Алексей Георгиевич СУЛТАНОВА Ирина Константиновна ШЕДЕНКОВ Сергей Игнатович Ответственный за выпуск И.Ю. Никитенко Компьютерная верстка Д.К. Измайлович Подписано в печать 27.11.2009. Формат 60841/16. Бумага офсетная. Отпечатано на ризографе. Гарнитура Таймс. Усл. печ. л. 0,87. Уч.-изд. л. 0,68. Тираж 100. Заказ 785. Издатель и полиграфическое исполнение: Белорусский национальный технический университет. ЛИ № 02330/0494349 от 16.03.2009. Проспект Независимости, 65. 220013, Минск.
15
Момент инерции — определение, формула, значение, факты
Что такое момент инерции?
Момент инерции (MOI) — это сопротивляемость тела его угловому ускорению. Момент инерции можно выразить как; I=mk 2 , где m — масса тела, а k — радиус вращения.
Момент инерции Определение
Момент инерции – это величина, выражающая тенденцию тела сопротивляться внешнему угловому ускорению, которая может быть рассчитана как сумма произведений массы каждой частицы тела на квадрат расстояния до нее от оси, вдоль которой он должен вращаться.
Загрузить формулы для GATE Civil Engineering — Fluid Mechanics
Формула момента инерции
Момент инерции – это резистивная способность поперечного сечения при вращении. Момент инерции также известен как площадь второго момента, которая может быть представлена как n Σ 1 A i y i , где y — расстояние центра тяжести площади от ее оси
Момент инерции также можно выразить как I=p/ω, где p — угловой момент, а ω — угловая скорость тела.
Момент инерции также можно рассчитать по формуле I=L/ω
Где I= момент инерции
L= угловой момент
ω= угловая скорость
Единица момента инерции
Как мы знаем, I =mk 2
Таким образом, единицей измерения момента инерции является кг-м 2
Скачать формулы для GATE Civil Engineering — Environmental Engineering
Момент инерции является очень важной темой физики, которая должен быть понятым, прежде чем применять его к любым реальным проблемам. Момент инерции тела при вращательном движении так же важен, как и масса тела при его поступательном движении. Момент инерции – это свойство сечения, показывающее его способность противостоять вращательному движению.
Момент инерции тела при вращательном движении так же важен, как и масса тела при его поступательном движении. Момент инерции – это свойство сечения, показывающее его способность противостоять вращательному движению.
Момент инерции поперечного сечения показывает сопротивление тела вращению, которое зависит от расстояния накопления массы по поперечному сечению. Момент инерции говорит о свойстве поперечного сечения тела.
Момент инерции твердой сферы
Момент инерции твердой сферы представляет собой присущую ей инерцию, которая обеспечивает сопротивление угловому движению. Момент инерции зависит от распределения массы, и он больше, если распределение массы больше удалено от оси вращения.
Момент инерции для различных форм
Момент инерции для различных форм зависит от расположения массы относительно центра тела. По мере удаления массы от центра тела увеличивается его момент инерции относительно центра, что делает сечение более прочным.
Теорема о параллельной оси
Момент инерции поперечного сечения зависит от оси, вокруг которой вращается поперечное сечение. Итак, если известен момент инерции относительно его центра, то его можно вычислить относительно любой оси, используя две теоремы.
Итак, если известен момент инерции относительно его центра, то его можно вычислить относительно любой оси, используя две теоремы.
Теорема о параллельных осях используется для расчета момента инерции твердого тела относительно оси, параллельной центральной оси тела
Согласно теореме о параллельных осях: I=I c +Mh 2
Где I c — момент инерции, M — масса тела, а h — расстояние между новой осью и центральной осью.
Теорема о перпендикулярной оси
Теорема об перпендикулярной оси используется для расчета момента инерции тела относительно оси, перпендикулярной плоскости тела. Теорема перпендикулярной оси очень полезна для нахождения полярного момента инерции и помогает найти жесткость балки при кручении.
Согласно теореме о перпендикулярной оси; I Z =I X +I Y
Влияние вращения оси на момент инерции
Момент инерции зависит от оси вращения тела, а также от распределения массы по всей площади тела. Момент инерции относительно новой оси вращения x’y’ можно рассчитать как
Момент инерции относительно новой оси вращения x’y’ можно рассчитать как
, где I x’y’ – это произведение момента инерции, а θ – вращение преобразованной оси против часовой стрелки.
Вращательная динамика — Что произойдет с моментом инерции, если тело разделить на 2 конгруэнтные части?
спросил
Изменено 4 года, 2 месяца назад
Просмотрено 959 раз
$\begingroup$Если круглый диск разрезать пополам, а квадратную пластину разделить на 2 одинаковых прямоугольных треугольника, при этом ось вращения не меняется, т.е. если квадратная пластина вращалась вокруг оси, проходящей через ее центр перпендикулярно плоскости объекта, как две прямоугольные треугольные пластины будут вращаться вокруг одной оси?
- динамика вращения
- кинематика вращения
- момент инерции
Моменты инерции остаются неизменными, когда объект делится на части, конгруэнтные или нет, до тех пор, пока части не раздвигаются.
Когда вы вычисляете моменты инерции, вы интегрируете бесконечно малые элементы массы $dm$. Неважно, в какой «детали» находится $dm$. Важно только, насколько далеко она находится от оси вращения. 92_3+ … $$
Следовательно, сколько бы частей и каких бы случайных размеров мы ни разрезали, пока мы не нарушаем исходную геометрию, его момент инерции не изменится.
Например, если мы разрежем праздничный торт на разные кусочки случайным образом, но не раздвинем их, его момент инерции не изменится.
Если мы даже переместим части, но поместим их таким образом, чтобы радиус вращения новой формы $r_{gyration} = \sqrt{\frac{I}{m}} \quad , $ был таким же, как у исходного один момент инерции не изменится. 92$ зависимость для жесткого стержня, вращающегося в средней точке плоскости.
Если не менять ось вращения: фактически увеличивает начальную в два раза.
Image Вы вращаете палку, если она цельная, вам легко вращать. Если вы разрежете их пополам и соедините их на самом краю, а затем повернете, вы не почувствуете себя более «тяжелыми»? Если он сломается, вам потребуется гораздо больший угловой момент, чтобы поддерживать движение, иначе он улетит.
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google Зарегистрироваться через Facebook Зарегистрируйтесь, используя электронную почту и парольОпубликовать как гость
Электронная почтаТребуется, но не отображается
Опубликовать как гость
Электронная почтаТребуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания и подтверждаете, что прочитали и поняли нашу политику конфиденциальности и кодекс поведения.