
Самые простые схемы управления вращением двигателя постоянного тока

Электрика для начинающих
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе. Если рассматривать

Интересное
Для изготовления приспособления, которое позволит бесконтактно включать и выключать свет в комнате, потребуется не

Своими руками
Карманный автономный паяльник, работающий от одной литий ионной батарее, удобное решение, как говорится,

Мужик в доме
Содержание1 Двигаемся навстречу воде 2 Рециркуляция 3 Высокое давление в скважине 4 Тандем водокачек

Аккумуляторы и батареи
Всем привет, мы давно не делали индикаторы разряда автомобильного аккумулятора. Но в этой статье

Аккумуляторы и батареи
Содержание1 Вариант 12 Вариант 23 Вариант 34 Итог Многие самодельные блоки имеют такой недостаток,
Простая схема реверса двигателя постоянного тока с концевыми переключателями
Что-то не так?
Пожалуйста, отключите Adblock.
Портал QRZ.RU существует только за счет рекламы, поэтому мы были бы Вам благодарны если Вы внесете сайт в список исключений. Мы стараемся размещать только релевантную рекламу, которая будет интересна не только рекламодателям, но и нашим читателям. Отключив Adblock, вы поможете не только нам, но и себе. Спасибо.
Как добавить наш сайт в исключения AdBlockПри использовании двигателя постоянного тока в различных устройствах иногда возникает необходимость остановки двигателя в любом положении, а также в крайних положениях позиционирования с последующим реверсом.
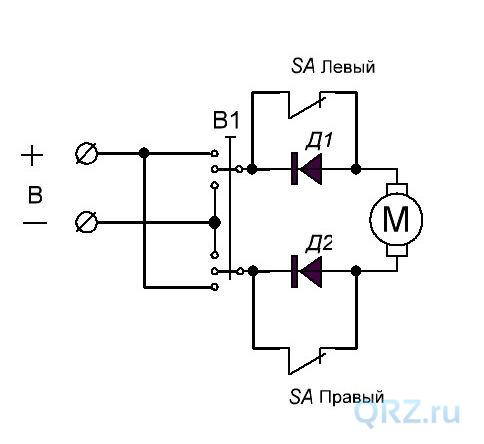
Эту задачу решает предлагаемая схема.
В1 — тумблер со средним положением для реверса двигателя. В зависимости от задачи он может иметь фиксацию в крайних положениях или без неё.
Диоды Д1 и Д2 подбираются по максимальному току двигателя при его нагрузке.
SA – концевики, установленные в устройстве.
Работа схемы
В исходном состоянии питание на двигатель не поступает и он не вращается.
Если тумблер перевести в верхнее по схеме положение двигатель вращается (допустим) влево. В крайнем левом положении SA левый размыкается и диод Д1 не пропускает напряжение питания. Двигатель останавливается.
Если тумблер перевести в нижнее положение — то происходит переполюсовка напряжения питания. Двигатель тогда вращается в правую сторону. Д1 этому уже не препятствует.
Далее концевик SA левый замыкается. При достижении крайнего правого положения SA правый размыкается и диод Д2 не пропускает напряжение питания. Двигатель останавливается.
Переключением положения тумблера меняется направление вращения двигателя.
Схему можно применить для вращения антенн, КПЕ, вариометров и т.п.
Матвийчук Валерий US3UT. 098-553-7459
Комментарии
Отзывы читателей — Скажите свое мнение!
Оставьте свое мнение
Отзывы читателей — Скажите свое мнение!
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ

Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.

В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.

При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора

Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:

Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:

Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:

В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения — отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.

При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:

Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал
Форум
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Реверс двигателя постоянного и переменного тока: схемы подключения
Реверс двигателя — это изменение вращения ротора на противоположное. Изменить направление вращения можно у электродвигателя постоянного тока, асинхронного и коллекторного двигателя переменного тока. Сложно представить себе устройство, в котором не применяется реверсивное вращение электродвигателя. Без изменения вращения невозможно представить работу тельфера, кран-балки, лебедок, грузоподъемных механизмов, лифтов, задвижек и т.п. Исключение составляют такие устройства, как заточные станки, вытяжки и т.д. В этой статье мы расскажем читателям сайта Сам Электрик, как осуществить реверс электродвигателей разных типов.Реверсивное включение двигателей постоянного тока
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т.к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.

На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.

КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.
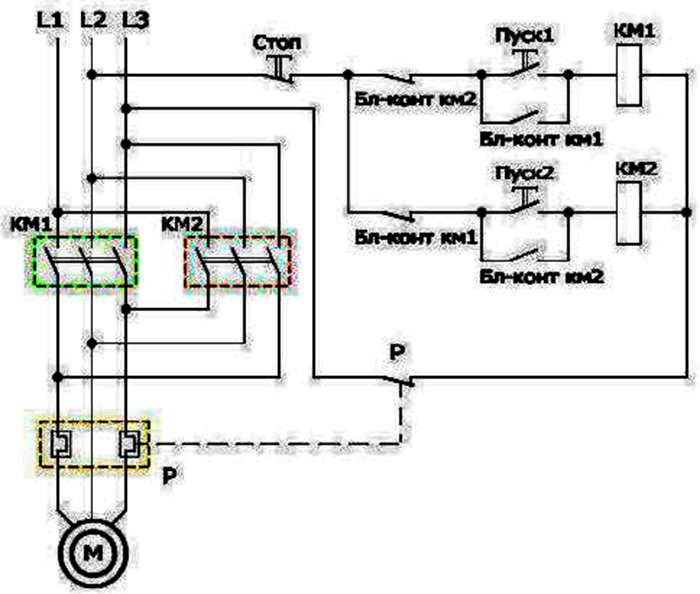
Получила распространение схема подключения, выполненная на двух магнитных пускателях. Собственно для двигателей постоянного тока она аналогична, но используются двухполюсные контакторы или пускатели. Эту схему так и называют «схема реверсивного пускателя» или «реверсивная схема пуска асинхронного трёхфазного электродвигателя».

При включении пускателя КМ1 кнопкой «Пуск 1», происходит прямая подача напряжения на обмотки и блокируется кнопка «Пуск 2» от случайного включения, посредством размыкания нормально-замкнутых контактов КМ-1. Двигатель вращается в одну сторону.
После отключения пускателя КМ1 кнопкой «Стоп» или полным снятием напряжения, можно включить КМ2 кнопкой «Пуск 2». В результате через контакты линия L2 подается напрямую, а L1 и L3 меняются местами. Кнопка «Пуск 1» заблокирована, так как нормально-замкнутые контакты пускателя КМ2 приводятся в движение и размыкаются. Двигатель начинает вращаться в другую сторону.
Схема применяется повсеместно и по сей день для подключения трехфазного двигателя в трехфазной сети. Простота схемного решения и доступность комплектующих — её весомые преимущества.
Наибольшее распространение находят электронные системы управления. Коммутационные схемы, которых собранные на тиристорах без пускателей. Хотя пускатели могут быть и установлены для дистанционного включения или выключения в этой цепи.

Они сложнее, но и надежнее устройств на контакторах. Для управления используется системы импульсно-фазного управления (СИФУ), системы частотного управления. Это многофункциональные устройства, с их помощью можно не только осуществлять реверс асинхронного электродвигателя, но и регулировать частоту вращения.
В домашних условиях возникает необходимость подключения двигателя 380В на 220 с реверсом. Для этого необходимо произвести переключение обмоток звезда треугольник. Подробнее мы рассматривали различия этих схем в статье размещенной на сайте ранее: https://samelectrik.ru/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Однако, если предполагается подключение трехфазного электродвигателя к однофазной сети, то для этого применяется конденсатор, который подключается по нижеприведенной схеме.

При этом чтобы осуществить реверс, достаточно переключить провод сети с В на клемму А, а конденсатор отсоединить от А и подсоединить к клемме В. Удобно это сделать с помощью 6-контактного тумблера. Это типовое включение асинхронного электродвигателя к сети 220В с конденсатором.
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.

Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.
Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.

Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.
Схема реверса электродвигателя на ардуино
В конструировании моделей или робототехнике часто применяются небольшие щеточные электродвигатели постоянного тока, для управления которыми используется программируемый микроконтроллер ардуино.
Если вращение двигателя предполагается только в одну сторону, и мощность электродвигателя небольшая, а напряжение питания от 3,3 до 5 вольт, то схему можно упростить и запитать непосредственно от ардуино, но так делают редко.
В моделях с дистанционным управлением, где необходимо использовать реверс моторов с напряжением более 5В, применяют ключи, собранные по мостовой схеме. В этом случае схема подключения двигателя с реверсом на ардуино будет выглядеть подобно тому что изображено ниже. Такое включение применяется чаще всего.

В мостовой схеме могут применяться полевые транзисторы или специальное согласующее устройство — драйвер, с помощью которого подключаются мощные моторчики.
В заключение отметим, что собирать схему реверса электродвигателя должен подготовленный специалист. Однако, при самостоятельном подключении необходимо соблюдать условия техники безопасности, выбрать подходящую схему соединения и подобрать необходимые комплектующие, строго следуя инструкции по монтажу. В этом случае у конструктора не возникнет трудностей в подключении и эксплуатации электродвигателя.
Теперь вы знаете, что такое реверс электродвигателя и какие схемы подключения для этого используют. Надеемся, предоставленная информация была для вас полезной и интересной!
Материалы по теме:
Схема реверса с описанием подключения
Практически любой электродвигатель можно заставить вращаться как в одну, так и в другую сторону. Это часто необходимо, особенно при конструировании различных механизмов, например, систем закрывания и открывания ворот. Обычно на корпусе двигателя указывается заводское направление движения вала, которое считается прямым. Кручение в другую сторону в этом случае будет реверсивным.
Что такое реверс
Проще говоря, реверс – это изменение направления движения какого-либо механизма в противоположную сторону от выбранного основного. Схему реверса можно получить несколькими способами:
- Механическим
- Электрическим.
В первом случае при помощи переключения шестеренчатых связей, соединяющих ведущий вал с ведомым, добиваются вращения последнего в обратную сторону. По такому принципу работают все коробки передач.
Электрический способ подразумевает непосредственное воздействие на сам двигатель, где в изменении движения ротора принимают участие электромагнитные силы. Этот метод выигрывает тем, что не требует применения сложных механических преобразований.
Для того, чтобы получить реверс электродвигателя, необходимо собрать специальную электрическую схему, которая так и называется – схема реверса двигателя. Она будет отличаться для разных типов электрических машин и питающего напряжения.
Где применяется реверс
Легче перечислить случаи, когда реверс не используется. Практически вся механика построена на передаче крутящего момента по часовой стрелке и наоборот. Сюда можно отнести:
- Бытовую технику: стиральные машины, аудиопроигрыватели.
- Электроинструмент: реверсивные дрели, шуруповерты, гайковерты.
- Станки: расточные, токарные, фрезерные.
- Транспортные средства.
- Спецтехнику: крановое оборудование, лебедки.
- Элементы автоматики.
- Робототехнику.
Ситуация, с которой чаще всего сталкивается обычный человек на практике, это необходимость собрать схему подключения реверса электродвигателя асинхронного переменного тока либо коллекторного мотора постоянного тока.
Подключение асинхронного мотора 380 В к трехфазной сети в реверс
Схема подключения асинхронника в прямом направлении имеет определенную последовательность подачи фаз A, B, C на контакты двигателя. Ее возможно доработать, например, добавив переключатель, который бы менял местами любые две фазы. Таким способом можно получить схему реверса электродвигателя. В практических схемах такими фазами принято считать B и A.
Дополнительное оборудование:
- Пускатели магнитного типа (КМ1 и КМ2).
- Станция на три кнопки, где два контакта имеют нормально разомкнутое положение (в исходном состоянии контакт не проводит ток, при нажатии на кнопку происходит замыкание цепи), один нормально замкнутый.
Схема работает следующим образом:
- Включением автоматических предохранителей АВ1 (силовая линия), АВ2 (цепь управления) ток поступает на трехкнопочный переключатель и клеммы магнитных контакторов, которые в исходном состоянии разомкнуты.
- Нажатием кнопки «Вперед» ток проходит на катушку электромагнита контактора 1, который притягивает якорь с силовыми контактами. Одновременно при этом происходит обрыв цепи управления контактора 2, его теперь невозможно включить кнопкой «Реверс».
- Вал двигателя начинает вращаться в основном направлении.
- Нажатием кнопки «Стоп» ток в цепи обмотки управления прерывается, электромагнит отпускает якорь, силовые контакты размыкаются, замыкается блокировочный контакт кнопки «Реверс», и ее теперь можно нажать.
- При нажатии кнопки «Реверс» происходят аналогичные процессы только в цепи контактора 2. Вал двигателя будет вращаться в обратную сторону от основного направления.
Подключение мотора 220В к однофазной сети в реверс
Добиться реверса движения вала двигателя в этом случае возможно, если есть доступ к выводам его пусковой и рабочей обмоток. Эти моторы имеют 4 вывода: два на пусковую обмотку, подключенную с конденсатором, два на рабочую.

Если нет информации о назначении обмоток, ее можно получить методом прозвонки. Сопротивление пусковой обмотки всегда будет больше, чем рабочей за счет меньшего сечения провода, которым она намотана.
В упрощенном варианте схемы подключения мотора 220 В подают на рабочую обмотку, один конец пусковой обмотки на фазу или ноль сети (без разницы). Двигатель начнет вращаться в определенную сторону. Чтобы получить схему реверса, нужно отсоединить конец пусковой обмотки от контакта и туда подключить другой конец той же обмотки.
Чтобы получить полную рабочую схему включения, необходимо оборудование:
- Защитный автомат.
- Пост кнопочный.
- Электромагнитные контакторы.
Схема реверса и прямого хода в этом случае очень похожа на схему подключения трехфазного мотора, но коммутация здесь происходит не фаз, а пусковой обмотки в одном либо другом направлении.
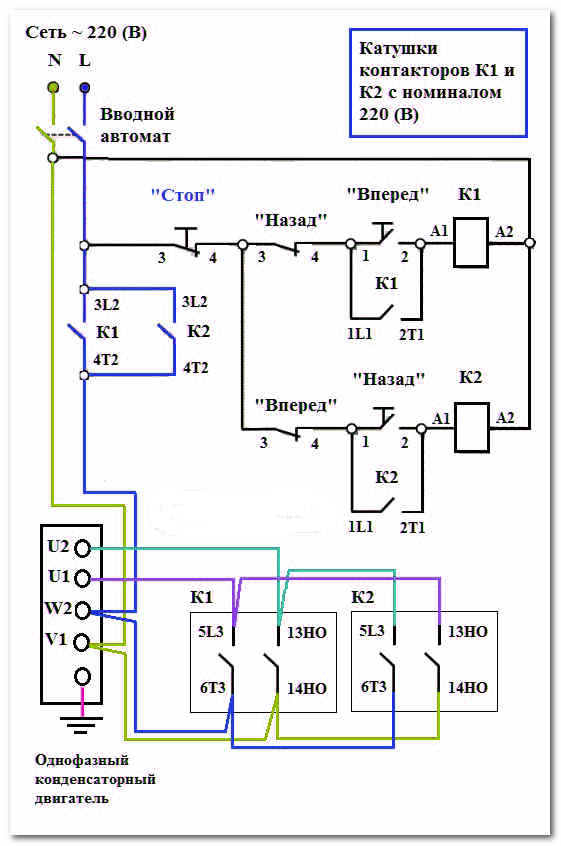
Схема реверса трехфазного двигателя в однофазной сети
Так как трехфазному асинхронному двигателю будет недоставать двух фаз, их нужно компенсировать конденсаторами – пусковым и рабочим, на которые коммутируют обе обмотки. От того, куда присоединить третью, зависит кручение вала в ту или иную сторону.
На схеме ниже видно, что обмотка под номером 3 через рабочий конденсатор подсоединяется к трехпозиционному тумблеру, который и отвечает за режимы работы двигателя вперед/назад. Два других его контакта объединены с обмотками 2 и 1.
При включении двигателя нужно придерживаться следующего алгоритма действий:
- Подать питание на схему через вилку либо рубильник.
- Тумблер для переключения режимов работы перевести в положение вперед или назад (реверс).
- Тумблер питания поставить в положение ON (вкл).
- Нажать кнопку «Пуск» на время, не превышающее трех секунд, чтобы произвести запуск двигателя.
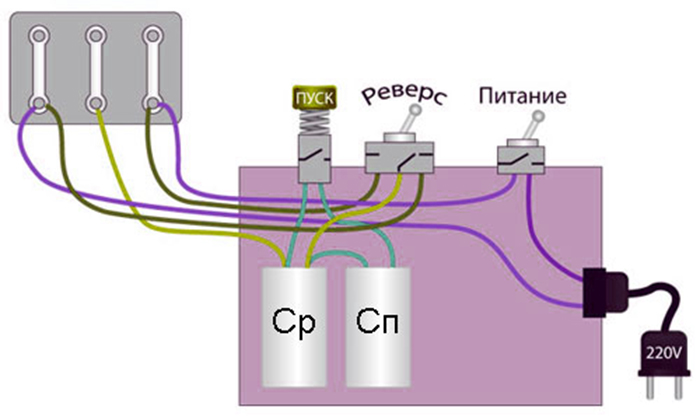
Схема подключения двигателя с реверсом от постоянного тока
Моторы, работающие от постоянного тока, несколько сложнее подключить, нежели электрические машины переменной сети. Затруднение состоит в том, что конструкции таких устройств могут быть разными, а точнее разным является способ возбуждения обмотки. По этому признаку различают двигатели:
- Независимого способа возбуждения.
- Возбуждения самостоятельного (бывают последовательного, параллельного и смешанного подключения).
Касаемо первого типа устройств, то здесь якорь не связан с обмоткой статора, они питаются каждый от своего источника. Этим добиваются огромных мощностей двигателей, используемых на производстве.
В станочном оборудовании и вентиляторах применяют моторы параллельного возбуждения, где энергия источника одна для всех обмоток. Электрические транспортные средства построены на основе последовательного возбуждения обмоток. Реже встречается смешанное возбуждение.
Во всех описанных типах конструкций двигателей возможно запустить ротор в противоположном направлении от основного хода, то есть реверсом:
- При последовательной схеме возбуждения роли не играет, где менять направление тока в якоре или статоре – в обоих случаях двигатель будет стабильно работать.
- В других вариантах возбуждения машин рекомендовано задействовать только обмотку якоря в целях реверсирования. Это связано с опасностью обрыва в статоре, скачка электродвижущей силы (ЭДС) и, как следствие, повреждения изоляции.
Запуск мотора схемой звезда-треугольник
При прямом запуске мощных трехфазных электродвигателей, применяя схему управления реверсом, происходят просадки напряжения в сети. Это связано с большими пусковыми токами, протекающими в этот момент. Чтобы снизить значение тока, применяют постепенный запуск мотора по схеме звезда-треугольник.
Суть заключается в том, что начало и конец каждой обмотки статора выводят в коробку с клеммами. Управляется схема тремя контакторами. Они поэтапно включают обмотки в звезду, а далее при разгоне двигателя выводят систему на рабочее состояние при подключении треугольником.
Как отличить реверсивный пускатель от прямого
Реверсивный пускатель — более сложное устройство. На самом деле, он состоит из двух обычных прямых пускателей, последние объединены в одном корпусе. Внутренняя схемотехника реверсивного устройства характерна тем, что невозможно запустить одновременно два режима – прямой и реверс. За этот процесс отвечает схема блокировки, которая может быть электрической или механической.

В заключение
Необходимо помнить, что подключать двигатели трехфазного напряжения к сети на 380В дозволено только квалифицированным специалистам, имеющим допуск к работе с высоковольтным оборудованием. Кустарные электрические схемы могут быть причиной возникновения электрических травм!
Как управлять мотором постоянного тока
Двигатель постоянного тока
Для начала рассмотрим повнимательней обычный двигатель постоянного тока. Любой двигатель имеет две основные части — ротор и статор. В коллекторном двигателе статор — неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) — вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) — возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V — Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.
Максимальной
мощности (Torque — крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента — линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.
Мы
видим, что рабочее напряжение данного
мотора — 12В, потребляемый ток под
нагрузкой — 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора — индуктивность — сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность — при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).
Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает
схема очень просто. Если открыть верхний
правый и левый нижний транзистор, то на
клемах мотора справа будет плюс, а слева
будет минус. Мотор будет крутиться в
одну сторону. Если открыть левый верхний
и правый нижний, то справа будет минус,
а слева плюс — полярность тока сменится,
и мотор будет крутиться в другую сторону.
Паразитные диоды внутри MOSFET транзисторов
будут защищать всю схему (параметры
этих диодов не очень хорошие и в реальных
схемах могут понадобиться более
быстродействующие диоды Шотке параллельно
паразитным диодам, для снижения нагрева
полевого транзистора), так что лишние
компоненты не понадобятся, кроме
искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.
N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор — открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему — добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.
Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая
частота:
Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще — лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста, а для регулирование скорости нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора. Как лучше ими управлять? На какой транзистор подавать ШИМ сигнал? Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
когда транзистор закрыт, то ток ЭДС мотора идёт через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике — будем делать плату управления 4-мя моторами для робота.
Схемы управления реверсом электродвигателей различных типов » ЭЛМАШ
В зависимости от вида питающего тока электрические двигатели промышленного назначения можно разделить на две большие группы: электрические машины постоянного и переменного тока. Соответственно схемы реверса для различных типов электродвигателей реализованы по-разному. Рассмотрим наиболее распространенные схемы реверсирования разных видов электрических двигателей.Схемы управления и реверса двигателей постоянного тока
Для смены направления вращения вала в электрических машинах постоянного тока необходимо изменить полярность напряжения на обмотке возбуждения или якоре электродвигателя. На практике для реверсирования двигателей со смешанным параллельным и независимым возбуждением чаще применяют второй способ, так как при коммутации цепи обмотки ток в ней многократно возрастает, что увеличивает вероятность ее перегрева.

В данной схеме управления двигателем постоянного тока с параллельным возбуждением реверс реализован при помощи магнитных пускателей. При нажатии кнопки Sв на катушку пускателя KM 1 подается напряжение, нормально разомкнутые контакты К 1 замыкаются, нормально замкнутые размыкаются, ток проходит по цепи ”плюс” питающей сети – силовой нормально разомкнутый контакт K 1 – якорь электродвигателя – нормально замкнутый контакт K2 –“минус” питающей сети.
При нажатии кнопки Sс цепь питания катушки КМ 1 разрывается, контакт К1 в силовой цепи размыкается, двигатель останавливается. При нажатии кнопки Sн ток протекает по цепи “плюс” питающей сети – силовой контакт К2 – якорь двигателя – нормально замкнутый контакт К 1 – минус питающий сети. Таким образом, изменяется направление тока в цепи якоря, он вращается в обратную сторону.
В схемах управления и реверса двигателей постоянного тока широко распространены бесконтактные коммутирующие устройства, тиристорные и транзисторные ключи, смонтированные в составе широтноимпульсных преобразователей.

При подаче питающего напряжения на трехфазный выпрямитель постоянный ток с него подается на транзисторы Т 1 и Т 2, которые открываются и закрываются управляющими сигналами U 1 и U 2. Обмотка возбуждения и якорь двигателя подключены между транзисторами и нулевым проводником питающей сети. Подачей напряжения U 3 на катушку реле отключается динамическое торможение электродвигателя. При подаче управляющего напряжения U 1 на транзистор T 1 осуществляется пуск двигателя. Подачей отпирающего сигнала U 2 осуществляется реверс.
Схемы реверсирования двигателей переменного тока
Наиболее распространенными типами электрических машин переменного тока являются однофазные и трехфазные электродвигатели. Изменение направления вращения вала последних достигается реверсом магнитного поля статора. Для этого необходимо изменить порядок подключения 2-х фаз питания статорной обмотки.
Реверсивные магнитные пускатели получили наибольшее распространение, эта схема проста и надежна. Элементы схемы дешевы, при поломке их легко купить и заменить.

При замыкании контакта Sв на катушку KM 1 подается питание, в силовой части схемы замыкаются КМ1, двигатель запускается. При нажатии кнопки Sc цепь, питающая катушки пускателей разрывается, контакты в силовой цепи размыкаются, двигатель останавливается. Для реверса двигателя необходимо нажать кнопку Sн. Цепь питания пускателя KМ 2 замыкается, его контакты KМ 2 в силовой цепи двигателя замыкаются, порядок фаз меняется. Двигатель вращается в обратном направлении.
Реверс однофазных двигателей переменного тока реализуется изменением направления тока пусковой или рабочей обмотки.
Для пуска двигателя включается тумблер Sa 1. Ток протекает по цепи: силовой диод VD 1 – пусковой конденсатор C 1, а так же параллельно подключенные резистор R 1 и рабочий конденсатор C 2 – обмотка двигателя. Изменение направления тока, питающего обмотку, достигается переключением тумблера Sa 2. Ток поступает на пусковой конденсатор C 4, резистор R 2, рабочий конденсатор C 3 и обмотку. Двигатель вращается в обратную сторону.
В многофункциональных устройствах управления электродвигателями переменного тока на базе частотных и широтноимпульсных преобразователей для реверса используют бесконтактные коммутирующие элементы: симисторы, транзисторы. Однако, принцип реверса остается таким же: изменение порядка подключения фаз для трехфазных двигателей и изменение направления тока в обмотках для однофазных.
Отправить заявку или сообщение Вы можете через форму обратной связи, или позвонить +7 (495) 545-44-32.
Другие новости по теме:
Вернуться