
Способы запуска электродвигателя постоянного тока: рабочие схемы
Хорошие тяговые характеристики электрических машин постоянного тока сделали их неотъемлемым элементом большинства устройств промышленной и бытовой механизации. Но вместе с тем возникает и существенная проблема значительных пусковых токов, в сравнении с асинхронными электродвигателями, работающих на переменном напряжении. Именно поэтому многие специалисты детально изучают способы запуска электродвигателя постоянного тока, прежде чем включить агрегат.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку.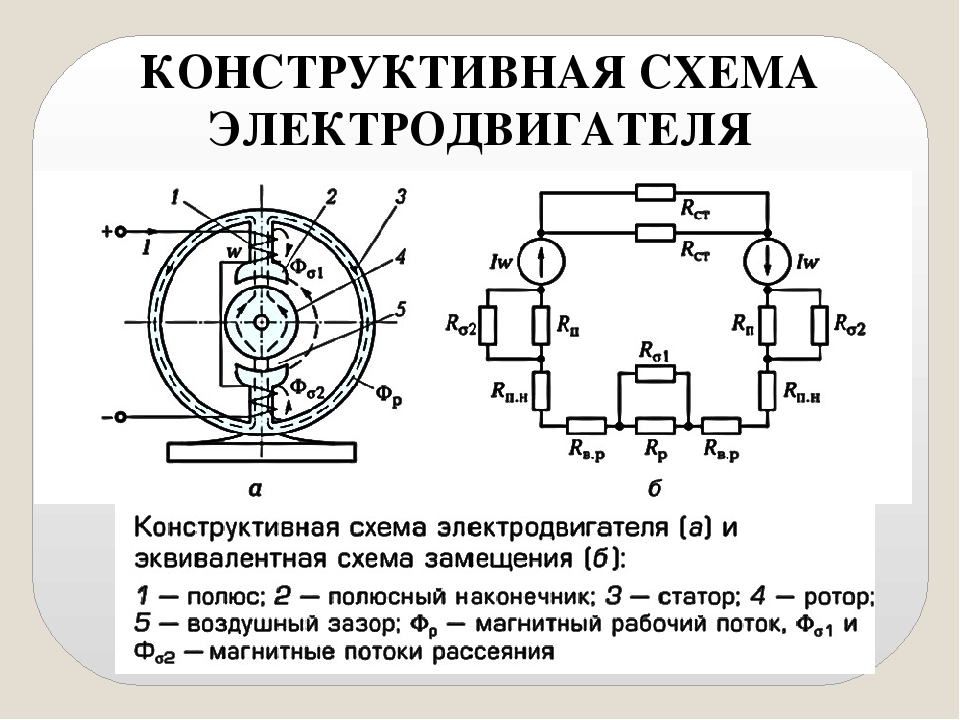
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
I = U/Rобм, где
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
I = (U — Eпрот)/Rобм
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
I = U / (Rобм + Rреостата)
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
Рис 1.
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.

- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.

Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
Рис. 3. Запуск ДПТ с последовательным возбуждениемНа рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
Рис. 4. Запуск ДПТ с независимым возбуждениемНа схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Схема электродвигателя постоянного тока
Электродвигатель постоянного тока — проблема выбораЭлектродвигатель постоянного тока, как известно, работает на основе использования принципа магнитной индукции. При этом
основное и важнейшее преимущество электродвигателя постоянного тока заключается в возможности плавной регулировки в нем скорости вращения в различных диапазонах с высокой точностью.Вследствие этого данный тип электродвигателя приобрел широкое распространение на рельсовом и безрельсовом электрифицированном транспорте, в подъемных кранах, на прокатных станах, в устройствах автоматики и т. п. И, хотя сфера распространения электродвигателя постоянного ока выглядит достаточно внушительной, нельзя не заметить, что данный тип электродвигателя применяют только там, где применение другого типа двигателя — переменного тока невозможно или крайне нецелесообразно. Отсюда неудивительно, что в среднем, на каждые 70 двигателей переменного тока сегодня приходится всего лишь 1 электродвигатель постоянного тока.
Отсюда неудивительно, что в среднем, на каждые 70 двигателей переменного тока сегодня приходится всего лишь 1 электродвигатель постоянного тока.
Этот момент, кстати, так же резко снижает и выбор производителей данного типа электродвигателей на мировом рынке. Тем более, если мы говорим о качественном выборе. И здесь выбор электродвигателей постоянного тока от такого известного европейского производителя как T-T Electric может оказаться порой реально безальтернативным.
Разумеется, лишь в том случае, если Вам нужен именно электродвигатель постоянного тока. Но как понять, что этот именно тот выбор? Как же здесь не ошибиться?
Для этого давайте рассмотрим устройство электродвигателя постоянного тока, проанализируем схему электродвигателя постоянного тока и принципы его работы.
На сегодняшний день фактом является то, что довольно длительное противостояние двух видов тока, развернувшееся в мировой экономике и производстве в конце XIX — начале ХХ веков, привело к практически безоговорочной победе двигателя переменного тока и постепенной капитуляции электродвигателя постоянного тока.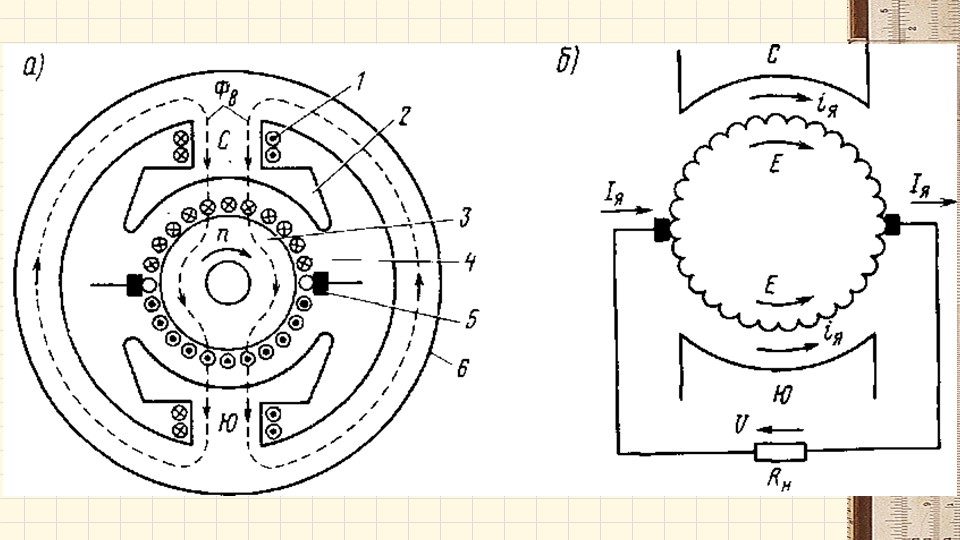
Причины здесь многогранны и связаны как отчасти с относительной дороговизной электродвигателя постоянного тока, необходимостью его постоянного ремонта, так и с факторами прогресса самих «переменников» активно отвоевывающих все новые и новые ниши у электродвигателя постоянного тока. За электродвигатели переменного тока говорит простота их технологичной конструкции, высокие энергетическим показателям, надежность и стабильность работы.
Однако электродвигатели постоянного тока до сих пор также активно совершенствуются, здесь все также разрабатываются новые модели. И они все еще активно используются на производстве и в быту. Для того, чтобы понять, что это так достаточно просто пройтись по каталогу продукции T-T Electric, представленному на нашем сайте.
При этом основное технологическое отличие электродвигателя постоянного тока от двигателя переменного тока заключается наличие у первого коллектора — устройства переключающего обмотки во время вращения, и представляющего собой выведенные на изолированную часть вала начала и концы обмоток ротора двигателя. Тем самым устройство электродвигателя постоянного тока таково, что выводы якоря и выводы обмоток возбуждения здесь выводятся, как правило, на свои клеммы в клеммной коробке двигателя. На якорь поступает полное напряжение питания, в то время как на обмотку возбуждение регулируемый ток, например, от реостата, а в современных приводных системах, с платы обмотки возбуждения. Причем именно благодаря изменению силы этого тока и происходит вращение двигателя. Принцип работы здесь такой — чем больше ток на обмотке якоря, тем выше скорость двигателя.
Тем самым устройство электродвигателя постоянного тока таково, что выводы якоря и выводы обмоток возбуждения здесь выводятся, как правило, на свои клеммы в клеммной коробке двигателя. На якорь поступает полное напряжение питания, в то время как на обмотку возбуждение регулируемый ток, например, от реостата, а в современных приводных системах, с платы обмотки возбуждения. Причем именно благодаря изменению силы этого тока и происходит вращение двигателя. Принцип работы здесь такой — чем больше ток на обмотке якоря, тем выше скорость двигателя.
Правда стоит заметить, что у электродвигателей переменного тока также бывают выводы роторных обмоток, но в отличие от устройства электродвигателя постоянного тока, здесь они представляют из себя три сплошных кольца, на которые через коллекторный аппарат постоянно подаются фазовые напряжения.
Типы электродвигателя постоянного токаВ зависимости от подключения обмотки якоря и обмотки возбуждения двигатели постоянного тока делятся на электродвигатели с независимым возбуждением — обмотка возбуждения питается от своего источника, и с самовозбуждением — параллельное возбуждение, последовательное возбуждение и смешанное.
В промышленности применяются двигатели с независимым возбуждением. В этих двигателях обмотка возбуждения питается от независимого источника напряжения. Обмотки якоря и возбуждения независимы друг от друга.
Схема подключения двигателя с последовательным возбуждением, по сути, является аналогом схемы с независимым возбуждением. Разница в том, что и якорь, и обмотка возбуждения (через сопротивление) подключены к одному источнику питания.
Двигатели с такой схемой подключения применяются в системах с четким механическими характеристиками, как-то: станки, вентиляторы и т.п.
Моторы постоянного тока с последовательным возбуждением применяется в тех случаях, когда необходим большой пусковой ток, а, следовательно, и момент, а также мягкая механическая характеристика.
Двигатели с таким способом подключения применяются на транспорте: электровозы, трамваи, троллейбусы. По этой схеме обмотка якоря и возбуждения подключены последовательно.
Если подать напряжение на двигатель, то токи в обмотках будут одинаковы. Основной недостаток этих двигателей заключается в том, что при уменьшении нагрузки на валу двигателя до 25% от номинального значения, происходит резкое увеличение оборотов двигателя, чреватое для двигателя постоянного тока. Поэтому для предотвращения этого недостатка двигатель все время приходится нагружать.
Основной недостаток этих двигателей заключается в том, что при уменьшении нагрузки на валу двигателя до 25% от номинального значения, происходит резкое увеличение оборотов двигателя, чреватое для двигателя постоянного тока. Поэтому для предотвращения этого недостатка двигатель все время приходится нагружать.
Очень редко применяется схема подключения двигателя со смешанным возбуждением. В этой схеме одна обмотка возбуждения включена последовательно, а другая параллельно якоря.
Таким образом на сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока, однако наиболее распространенным является двигатели с независимым возбуждением, подключаемые через особые приводы постоянного тока обеспечивающие не только рекуперацию энергии, но и точное поддержание скорости и стабильный момент на валу во всем диапазоне регулирования скорости.
Приводы такого типа широко представлены на данном сайте: это приводы постоянного тока серии DCS550 и приводы постоянного тока серии DCS800.
Возбуждение двигателя постоянного тока. Схемы возбуждения
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис. 2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (7) и (9), представленными в статье » «, при U = const и i в = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными .
Если щетки находятся на геометрической нейтрали, при увеличении I а поток Ф δ несколько уменьшится вследствие действия поперечной реакции якоря . В результате этого скорость n , согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока «, будет стремится возрасти. С другой стороны, падение напряжения R а × I а вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 1: 1 – при преобладании влияния R а × I а; 2 – при взаимной компенсации влияния R а × I а и уменьшения Ф δ ; 3 – при преобладании влияния уменьшения Ф δ .
С другой стороны, падение напряжения R а × I а вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 1: 1 – при преобладании влияния R а × I а; 2 – при взаимной компенсации влияния R а × I а и уменьшения Ф δ ; 3 – при преобладании влияния уменьшения Ф δ .
Ввиду того что изменение Ф δ относительно мало, механические характеристики n = f (M ) двигателя параллельного возбуждения, определяемые равенством (9), представленным в статье «Общие сведения о двигателях постоянного тока «, при U = const и i в = const совпадают по виду с характеристиками n = f (I а) (рисунок 1). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рисунок 1) неприемлемы по условиям устойчивой работы (смотрите статью » «). Поэтому двигатели параллельного возбуждения изготавливаются со слегка падающими характеристиками вида 1 (рисунок 1). В современных высокоиспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рисунок 1) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, намагничивающая сила которой составляет до 10% от намагничивающей силы параллельной обмотки возбуждения. При этом уменьшение Ф δ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей , а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
В современных высокоиспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рисунок 1) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, намагничивающая сила которой составляет до 10% от намагничивающей силы параллельной обмотки возбуждения. При этом уменьшение Ф δ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей , а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
Изменение скорости вращения Δn (рисунок 1) при переходе от холостого хода (I а = I а0) к номинальной нагрузке (I а = I ан) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2 – 8% от n н. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и прочее).
Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и прочее).
| Рисунок 2. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения |
Регулирование скорости посредством ослабления магнитного потока
Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения R р.в (смотрите рисунок 1, б в статье » » и рисунок 1 в статье «Пуск двигателей постоянного тока «). При отсутствии добавочного сопротивления в цепи якоря (R ра = 0) и U = const характеристики n = f (I а) и n = f (M ), определяемые равенствами (7) и (9), представленными в статье «Общие сведения о двигателях постоянного тока «, для разных значений R р. в, i в или Ф δ имеют вид, показанный на рисунке 2. Все характеристики n = f (I а) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе I а, который, согласно выражению (5), представленному в статье «Общие сведения о двигателях постоянного тока «, равен
в, i в или Ф δ имеют вид, показанный на рисунке 2. Все характеристики n = f (I а) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе I а, который, согласно выражению (5), представленному в статье «Общие сведения о двигателях постоянного тока «, равен
I а = U / R а.
Однако механические характеристики n = f (M ) пересекают ось абсцисс в разных точках.
Нижняя характеристика на рисунке 2 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой M ст = f (n ) для рабочей машины, соединенной с двигателем (жирная штриховая линия на рисунке 2).
Точка холостого хода двигателя (M = M 0 , I а = I а0) лежит несколько правее оси ординат на рисунке 2. С увеличением скорости вращения n вследствие увеличения механических потерь M 0 и I а0 также увеличиваются (тонкая штриховая линия на рисунке 2).
Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращения n , то E а [смотрите выражение (6) в статье «Общие сведения о двигателях постоянного тока «] будет увеличиваться, а I а и M будут, согласно равенствам (5) и (8), представленным в статье «Общие сведения о двигателях постоянного тока «, уменьшаться. При I а = 0 и M = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скорости I а и M изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рисунке 2 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2. Изготавливаются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (смотрите статью «Регулирование скорости вращения и устойчивость работы двигателей постоянного тока «) или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
Стоимость двигателя при этом увеличивается.
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики
Если последовательно в цепь якоря включить добавочное сопротивление R ра (рисунок 3, а ), то вместо выражений (7) и (9), представленных в статье «Общие сведения о двигателях постоянного тока «, получим
| (1) |
| (2) |
Сопротивление R ра может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Рисунок 3. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а ) и соответствующие механические и скоростные характеристики (б )
Характеристики n = f (M ) и n = f (I а) для различных значений R ра = const при U = const и i в = const изображены на рисунке 3, б (R ра1 R
ра2 R
ра3). Верхняя характеристика (R ра = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (n = 0) в точке, для которой
Верхняя характеристика (R ра = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (n = 0) в точке, для которой
Продолжения этих характеристик под осью абсцисс на рисунке 3 соответствуют торможению двигателя противовключением. В этом случае n E а имеет противоположный знак и складывается с напряжением сети U , вследствие чего
а момент двигателя M действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (I а = I а0) с помощью приложенного извне момента вращения начать увеличивать скорость вращения, то сначала достигается режим I а = 0, а затем I а изменит направление и машина перейдет в режим генератора (участки характеристик на рисунке 3, б слева от оси ординат).
Как видно из рисунка 3, б , при включении R ра характеристики становятся менее жесткими, а при больших значениях R ра – круто падающими, или мягкими.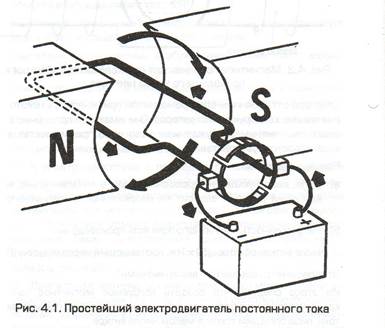
Если кривая момента сопротивления M ст = f (n ) имеет вид, изображенный на рисунке 3, б жирной штриховой линией, то значения n при установившемся режиме работы для каждого значения R ра определяются точками пересечения соответствующих кривых. Чем больше R ра, тем меньше n и ниже коэффициент полезного действия (к. п. д.).
Регулирование скорости посредством изменения напряжения якоря
Регулирование скорости посредством изменения напряжения якоря может осуществляется с помощью агрегата «генератор – двигатель» (Г – Д), называемого также агрегатом Леонарда (рисунок 4). В этом случае первичный двигатель ПД (переменного тока, внутреннего сгорания и тому подобный) вращает с постоянной скоростью генератор постоянного тока Г . Якорь генератора непосредственно подключен к якорю двигателя постоянного тока Д , который служит приводом рабочей машины РМ . Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника – сети постоянного тока (рисунок 4) или от возбудителей (небольших генераторов постоянного тока) на валу первичного двигателя ПД . Регулирование тока возбуждения генератора i в.г должно производиться практически от нуля (на рисунке 4 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя можно изменить полярность генератора (на рисунке 4 с помощью переключателя П ).
Регулирование тока возбуждения генератора i в.г должно производиться практически от нуля (на рисунке 4 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя можно изменить полярность генератора (на рисунке 4 с помощью переключателя П ).
Рисунок 4. Схема агрегата «генератор – двигатель» для регулирования скорости двигателя независимого возбуждения
Пуск двигателя Д и регулирование его скорости осуществляют следующим образом. При максимальном i в.д и i в.г = 0 производят пуск первичного двигателя ПД . Затем плавно увеличивают i в.г, и при небольшом напряжении генератора U двигатель Д придет во вращение. Регулируя, далее, U в пределах до U = U н, можно получить любые скорости вращения двигателя до n = n н. Дальнейшее увеличение n возможно путем уменьшения i в.д. Для реверсирования двигателя уменьшают i в. г до нуля, переключают ОВГ и снова увеличивают i в.г от значения i в.г = 0.
г до нуля, переключают ОВГ и снова увеличивают i в.г от значения i в.г = 0.
Когда рабочая машина создает резко пульсирующую нагрузку (например, некоторые прокатные станы) и нежелательно, чтобы пики нагрузки полностью передавались первичному двигателю или в сеть переменного тока, двигатель Д можно снабдить маховиком (агрегат Г – Д – М, или агрегат Леонарда – Ильгнера). В этом случае при понижении n во время пика нагрузки часть этой нагрузки покрывается за счет кинетической энергии маховика. Эффективность действия маховика будет больше при более мягкой характеристике двигателя ПД или Д .
В последнее время все чаще двигатель ПД и генератор Г заменяют полупроводниковым выпрямителем с регулируемым напряжением. В этом случае рассматриваемый агрегат называют также вентильным (тиристорным ) приводом.
Рассмотренные агрегаты используются при необходимости регулирования скорости вращения двигателя с высоким к. п. д. в широких пределах – до 1: 100 и более (крупные металлорежущие станки, прокатные станы и так далее).
п. д. в широких пределах – до 1: 100 и более (крупные металлорежущие станки, прокатные станы и так далее).
Отметим, что изменение U с целью регулирования n по схеме рисунка 1, б , показанного в статье «Общие сведения о генераторах постоянного тока » и рисунка 3, а , не дает желаемых результатов, так как одновременно с изменением напряжения цепи якоря изменяется пропорционально U также ток возбуждения. Так как регулирование U можно производить только от значения U = U н вниз, то вскоре магнитная цепь окажется насыщенной, вследствие чего U и i в будут изменяться пропорционально друг другу. Согласно равенству (7), представленному в статье «Общие сведения о двигателях постоянного тока «), n при этом существенным образом не меняется.
В последнее время все больше распространяется так называемое импульсное регулирование двигателей постоянного тока. При этом цепь якоря двигателя питается от источника постоянного тока с постоянным напряжением через тиристоры, которые периодически, с частотой 1 – 3 кГц включаются и отключаются. Чтобы сгладить при этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени продолжительности всего цикла. Таким образом, импульсный метод позволяет регулировать скорость вращения двигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя.
Чтобы сгладить при этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени продолжительности всего цикла. Таким образом, импульсный метод позволяет регулировать скорость вращения двигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя.
Импульсный способ регулирования в экономическом отношении весьма выгоден для управления двигателями, работающими в режимах переменной скорости вращения с частыми пусками, например на электрифицированном транспорте.
| Рисунок 5. Рабочие характеристики двигателя параллельного возбуждения P н = 10 кВт, U н = 200 В, n н = 950 об/мин |
Рабочие характеристики
Рабочие характеристики представляют собой зависимости потребляемой мощности P 1 , потребляемого тока I , скорости n , момента M , и к.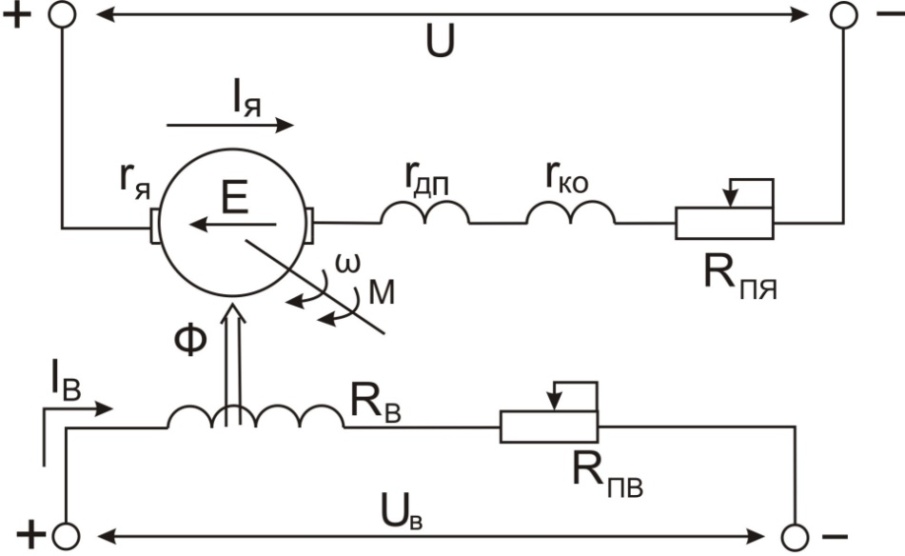 п. д. η от полезной мощности P 2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
п. д. η от полезной мощности P 2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
Одновременно с увеличением мощности на валу P 2 растет и момент на валу M . Поскольку с увеличением P 2 и M скорость n несколько уменьшается, то M ∼ P 2 / n растет несколько быстрее P 2 . Увеличение P 2 и M , естественно, сопровождается увеличением тока двигателя I . Пропорционально I растет также потребляемая из сети мощность P 1 . При холостом ходе (P 2 = 0) к. п. д. η = 0, затем с увеличением P 2 сначала η быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьшаться.
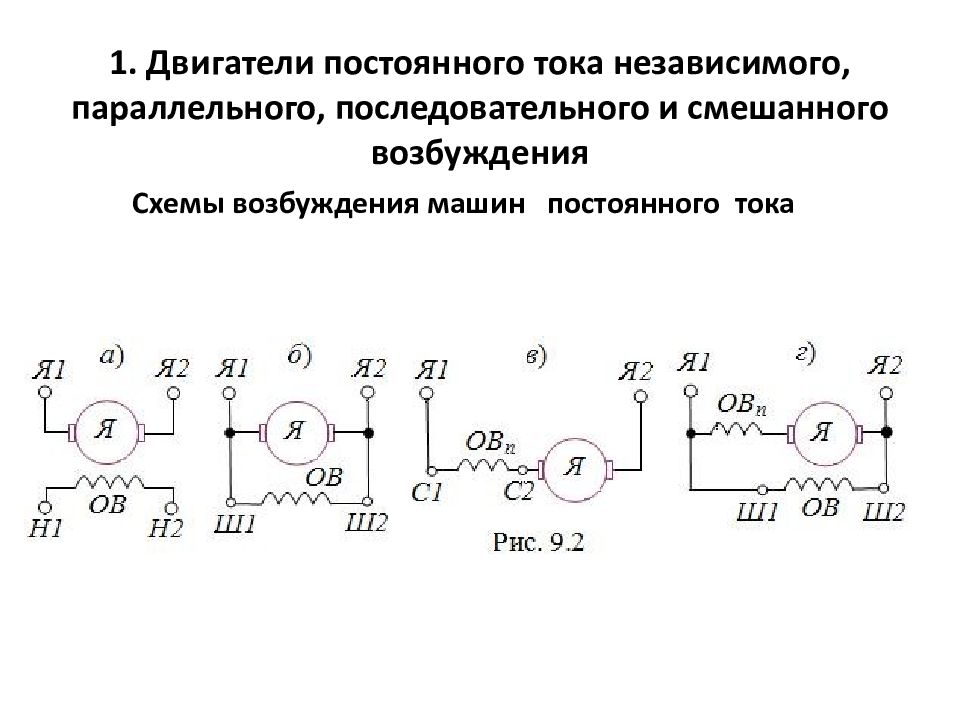
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым , параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой — для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.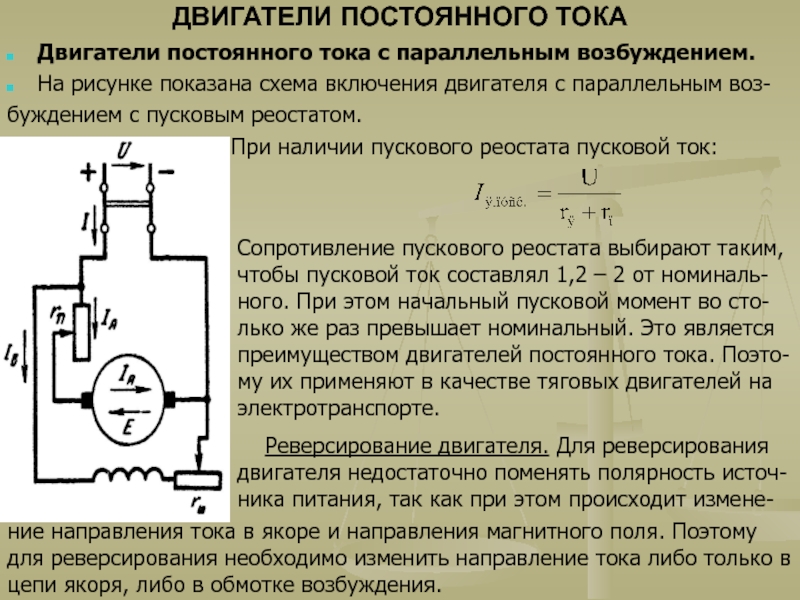 11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 — к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 — к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.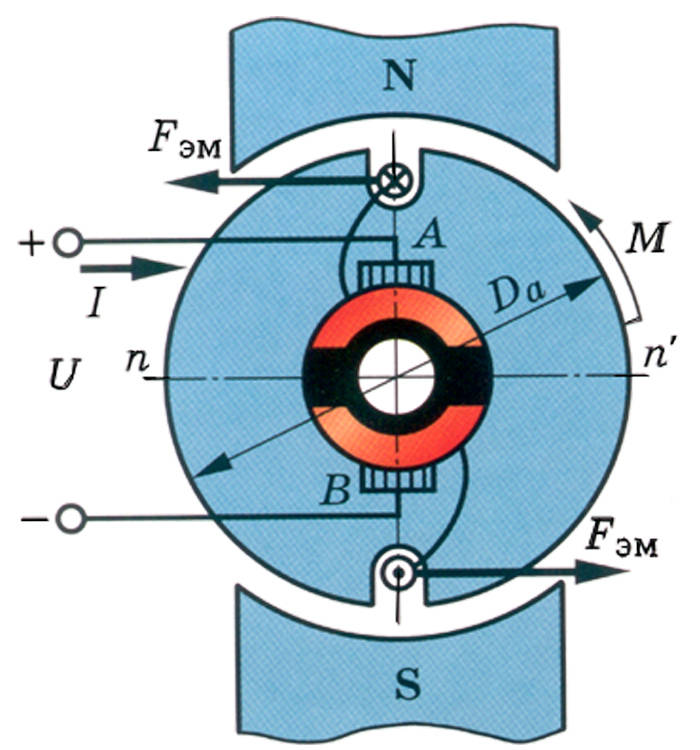
Рис.11.9. Виды возбуждения машин постоянного тока,
а — независимого возбуждения, б — параллельного возбуждения,
в — последовательного возбуждения, г — смешанного возбуждения.
ОВШ — обмотка возбуждения шунтовая, ОВС — обмотка возбуждения сериесная,» ОВН — обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10…40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1 , а при специальном исполнении двигателя — 6:1 . Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения (сериесные) включаются по схеме, (рис.11.9, в). Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря . Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5…2,5)Iн . После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения (компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд . Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П и 4П подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А . Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико — экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5…3 раза. При этом расход меди снижается на 25…30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П — серия машины постоянного тока;
XI — исполнение по типу защиты: Н — защищенное с самовентиляцией, Ф — защищенное с независимой вентиляцией, Б — закрытое с естественным охлаждением, О — закрытое с обдувом от постороннего вентилятора;
Х2 — высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ — условная длина статора: М — первая, L — вторая, Г — с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ — двигатель постоянного тока серии 2П , защищенного исполнения с самовентиляцией Н ,112 высота оси вращения в мм, первый размер статораМ , укомплектован тахогенератором Г , используется для умеренного климатаУ .
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины …………………………меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.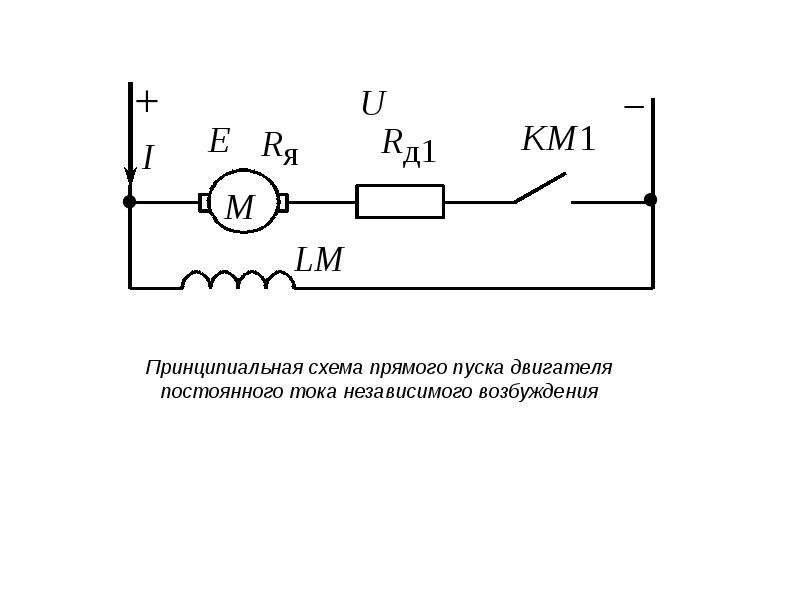
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3…0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм . Данные замеров отобразить в отчете.
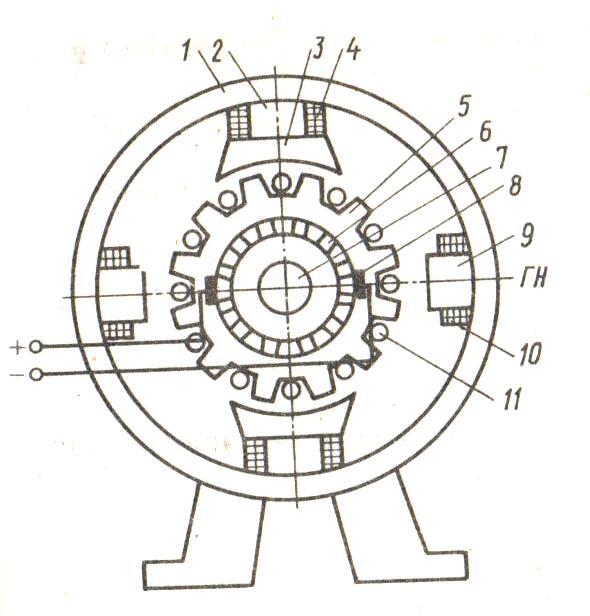
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис.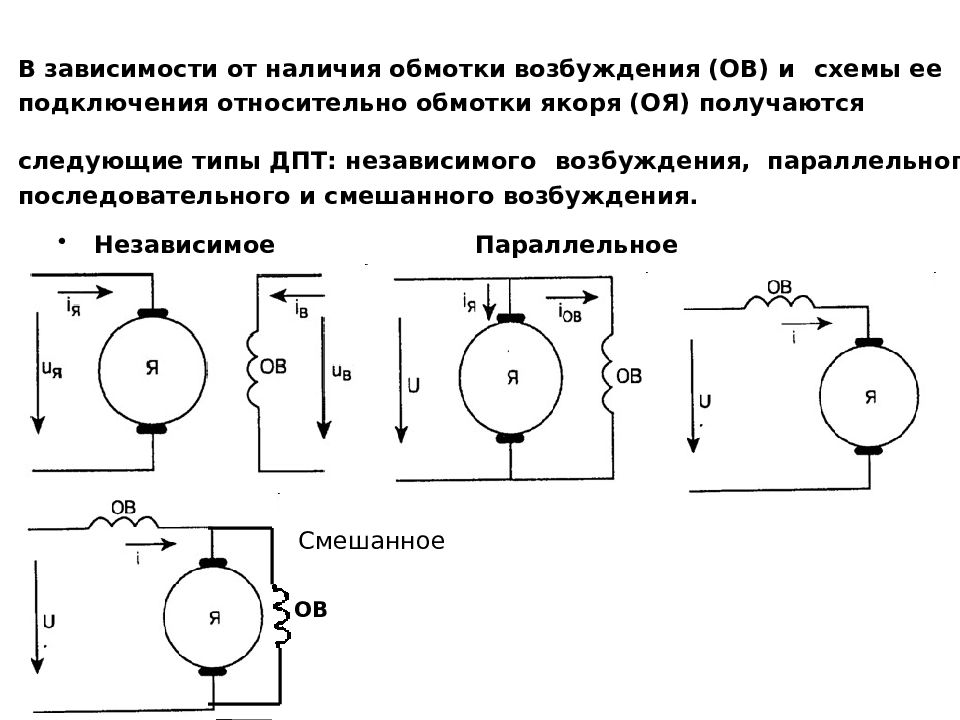 11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 — станина; 2 -якорь; 3 — главные полюсы; 4 — обмотка возбуждения; 5 — полюсные наконечники; 6 — обмотка якоря; 7 — коллектор; Ф — основной магнитный поток; F — сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7. В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18. Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
Как и в случае генератора, обмотки индуктора и якоря двигателя могут быть соединены либо последовательно (рис.339), либо параллельно (рис.340). В первом случае двигатель называют двигателем с последовательным возбуждением (или сериесным двигателем), во втором – двигателем с параллельным возбуждением (или шунтовым двигателем). Применяются также двигатели со смешанным возбуждением (компаунд-двигатели), в которых часть обмоток индуктора соединена с якорем последовательно, а часть параллельно. Каждый из этих типов двигателей имеет свои особенности, делающие его применение целесообразным в одних случаях и нецелесообразным в других.
1.
Двигатели с параллельным возбуждением. Схема включения в сеть двигателей этого
типа показана на рис. 361. Так как здесь цепи якоря и индуктора не зависят друг
от друга, то ток в них можно регулировать независимо при помощи отдельных
реостатов, включенных в эти цепи. Реостат , включенный в цепь якоря, называют
пусковым, а реостат , включенный в цепь индуктора, –
регулировочным. При пуске в ход двигателя с параллельным возбуждением пусковой
реостат должен быть обязательно полностью включен; по мере того как двигатель
набирает частоту вращения, сопротивление реостата постепенно уменьшают и при
достижении нормальной частоты вращения этот реостат выводится из цепи
полностью. Двигатели с параллельным возбуждением, особенно значительной
мощности, ни в коем случае нельзя включать без пускового реостата. Точно так же
при выключении двигателя следует сначала постепенно ввести реостат и лишь после
этого выключить рубильник, соединяющий двигатель с сетью.
Реостат , включенный в цепь якоря, называют
пусковым, а реостат , включенный в цепь индуктора, –
регулировочным. При пуске в ход двигателя с параллельным возбуждением пусковой
реостат должен быть обязательно полностью включен; по мере того как двигатель
набирает частоту вращения, сопротивление реостата постепенно уменьшают и при
достижении нормальной частоты вращения этот реостат выводится из цепи
полностью. Двигатели с параллельным возбуждением, особенно значительной
мощности, ни в коем случае нельзя включать без пускового реостата. Точно так же
при выключении двигателя следует сначала постепенно ввести реостат и лишь после
этого выключить рубильник, соединяющий двигатель с сетью.
Рис. 361. Схема включения двигателя с параллельным возбуждением. Латунная дуга 1, по которой движется рычаг пускового реостата, через зажим 2 присоединена к концу регулировочного реостата, а через зажим 3 – к пусковому реостату. Это делается для того, чтобы при переводе пускового реостата на холостой контакт 4 и выключении тока цепь возбуждения не разрывалась
Нетрудно
понять соображения, которыми вызваны эти правила включения и выключения
двигателей.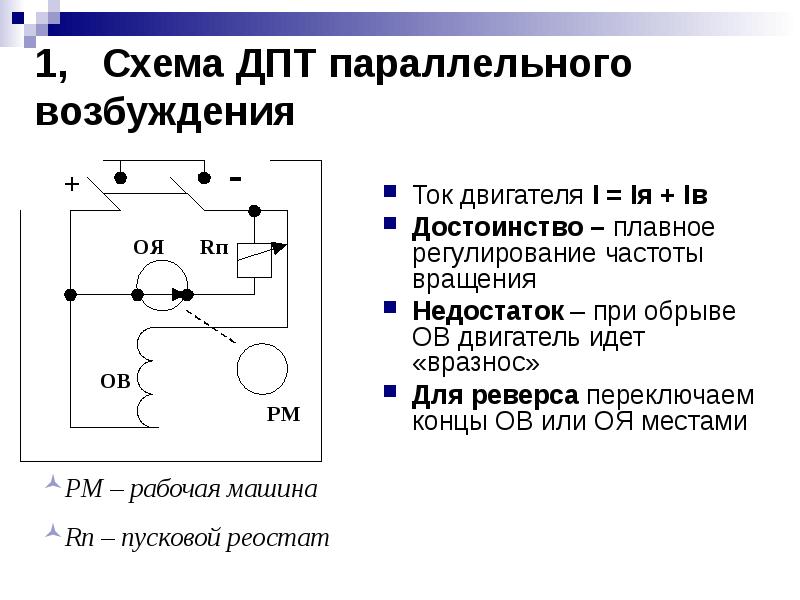 Мы видели (см. формулу (172.1)), что ток в якоре
Мы видели (см. формулу (172.1)), что ток в якоре
,
где – напряжение сети, а — э. д. с., индуцированная в обмотках якоря. В первый момент, когда двигатель еще не успел раскрутиться и набрать достаточную частоту вращения, э. д. с. очень мала и ток через якорь приближенно равен
Сопротивление якоря обычно очень мало. Оно рассчитывается так, чтобы падение напряжения на якоре не превышало 5-10 % от напряжения сети, на которое рассчитан двигатель. Поэтому при отсутствии пускового реостата ток в первые секунды мог бы в 10-20 раз превысить нормальный ток, на который рассчитан двигатель при полной нагрузке, а это для него очень опасно. При введенном же пусковом реостате с сопротивлением пусковой ток через якорь
. (173.1)
Сопротивление пускового реостата подбирают так, чтобы пусковой ток превышал нормальный не больше чем в 1,5-2 раза.
Поясним
сказанное числовым примером. Положим, что мы имеем двигатель мощности 1,2 кВт,
рассчитанный на напряжение 120 В и имеющий сопротивление якоря . Ток через якорь
при полной нагрузке
Ток через якорь
при полной нагрузке
.
Если бы мы включили этот двигатель в сеть без пускового реостата, то в первые секунды пусковой ток через якорь имел бы значение
,
в 10 раз превышающее нормальный рабочий ток в якоре. Если же мы хотим, чтобы пусковой ток превышал нормальный не больше, чем в 2 раза, т. е. был равен 20 А, то мы должны подобрать пусковое сопротивление таким, чтобы имело место равенство
,
откуда Ом.
Ясно также, что для шунтового двигателя очень опасна внезапная его остановка без выключения, например вследствие резкого возрастания нагрузки, так как при этом э. д. с. падает до нуля и ток в якоре возрастает настолько, что избыток выделяемого в нем джоулева тепла может привести к расплавлению изоляции или даже самих проводов обмотки (двигатель «перегорает»).
Регулировочный
реостат ,
включенный в цепь индуктора, служит для того, чтобы изменять частоту вращения
двигателя. Увеличивая или уменьшая сопротивление цепи индуктора с помощью этого
реостата, мы изменяем ток в цепи индуктора, а тем самым и магнитное поле, в
котором вращается якорь. Мы видели выше, что при заданной нагрузке двигателя
ток в нем автоматически устанавливается такой, чтобы возникающий вращающий
момент уравновешивал тормозящий вращающий момент, создаваемый нагрузкой
двигателя. Это осуществляется благодаря тому, что индуцированная э. д. с.
достигает соответствующего значения. Но индуцированная э. д. с. определяется, с
одной стороны, магнитной индукцией, а с другой, – частотой вращения якоря.
Мы видели выше, что при заданной нагрузке двигателя
ток в нем автоматически устанавливается такой, чтобы возникающий вращающий
момент уравновешивал тормозящий вращающий момент, создаваемый нагрузкой
двигателя. Это осуществляется благодаря тому, что индуцированная э. д. с.
достигает соответствующего значения. Но индуцированная э. д. с. определяется, с
одной стороны, магнитной индукцией, а с другой, – частотой вращения якоря.
Чем
больше магнитный поток индуктора, тем меньше должна быть частота вращения
двигателя, чтобы получить определенное значение э. д. с., и, наоборот, чем
слабее магнитный поток, тем больше должна быть частота вращения. Поэтому, для
того чтобы при заданной нагрузке увеличить частоту вращения шунтового
двигателя, нужно ослабить магнитный поток в индукторе, т. е. ввести большее
сопротивление в цепь индуктора при помощи регулировочного реостата. Напротив,
чтобы уменьшить частоту вращения шунтового двигателя, нужно увеличить магнитный
поток в индукторе, т. е. уменьшить сопротивление в цепи индуктора, выводя
регулировочный реостат.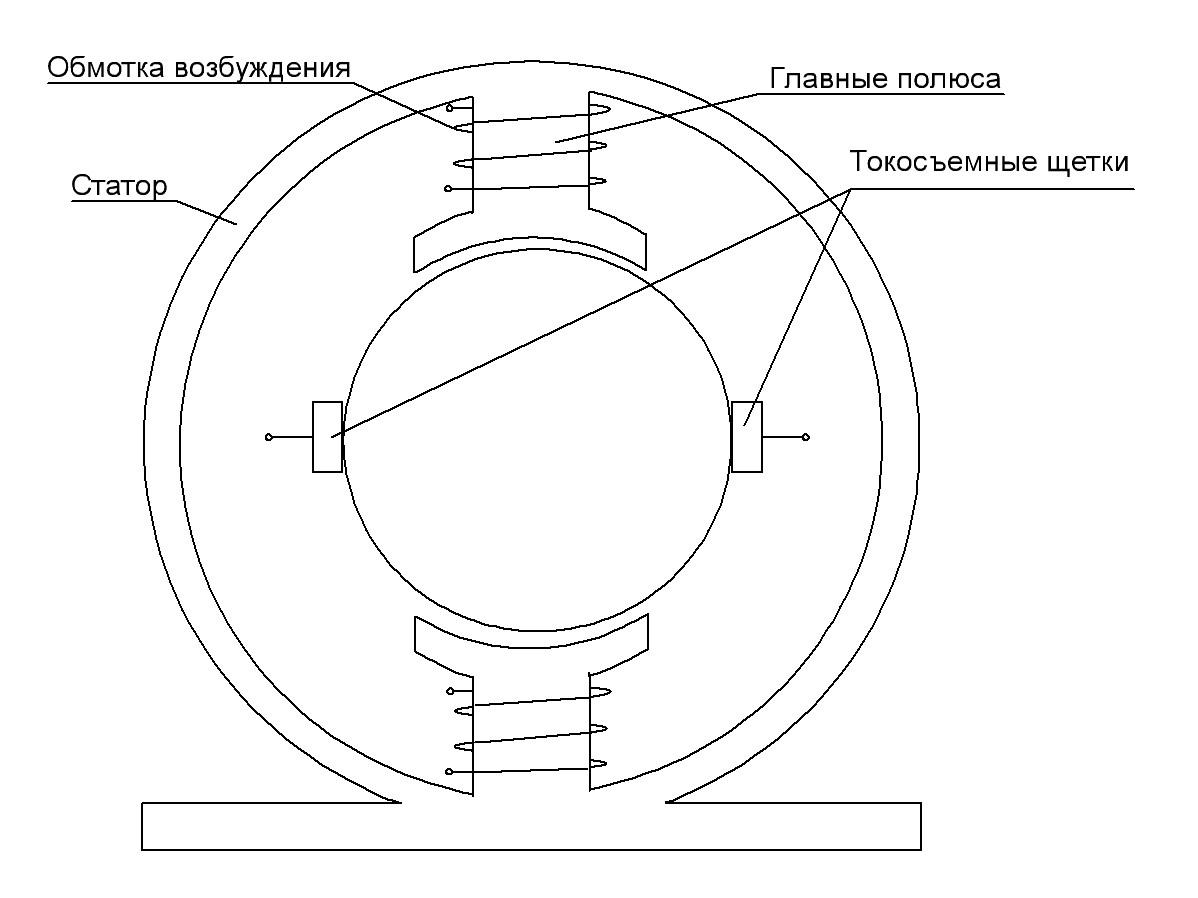
С помощью регулировочного реостата можно при нормальном напряжении и отсутствии нагрузки установить нормальную частоту вращения двигателя. При возрастании нагрузки ток в якоре должен возрастать, а индуцированная в нем э. д. с. – уменьшаться. Это происходит вследствие некоторого уменьшения частоты вращения якоря. Однако уменьшение частоты вращения, обусловленное возрастанием нагрузки от нуля до нормальной мощности двигателя, обычно очень незначительно и не превышает 5-10 % от нормальной частоты вращения двигателя. Это обусловлено главным образом тем, что в двигателях с параллельным возбуждением ток в индукторе не изменяется при изменении тока в якоре. Если бы при изменениях нагрузки мы хотели поддерживать прежнюю частоту вращения, то это можно было бы осуществить, несколько изменяя с помощью регулировочного реостата ток в цепи индуктора.
Таким
образом, с эксплуатационной точки зрения двигатели постоянного тока с
параллельным возбуждением (шунтовые двигатели) характеризуются следующими двумя
свойствами: а) частота их вращения при изменении нагрузки остается почти
постоянной; б) частоту их вращения можно в широких пределах изменять с помощью
регулировочного реостата.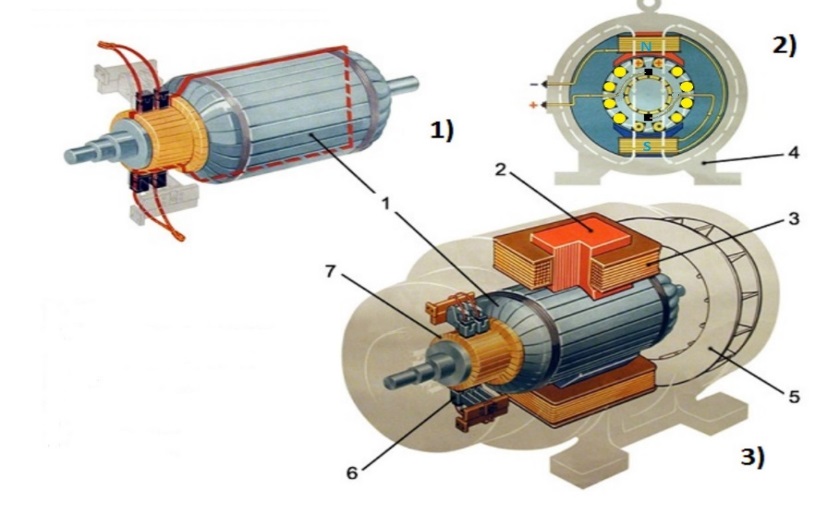 Поэтому такие двигатели довольно широко применяются в
промышленности там, где обе указанные их особенности имеют значение, например
для приведения в действие токарных и других станков, частота вращения которых
не должна сильно зависеть от нагрузки.
Поэтому такие двигатели довольно широко применяются в
промышленности там, где обе указанные их особенности имеют значение, например
для приведения в действие токарных и других станков, частота вращения которых
не должна сильно зависеть от нагрузки.
173.1. На рис. 362 показана схема шунтового двигателя с так называемым комбинированным пуско-регулировочным реостатом. Разберитесь в этой схеме и объясните, какую роль играют отдельные части этого реостата.
Рис. 362. К упражнению 173.1
173.2. Нужно пустить в ход шунтовый двигатель. Для этого даны два реостата: один из толстой проволоки с малым сопротивлением, другой из тонкой проволоки с большим сопротивлением. Какой из этих реостатов следует включить как пусковой и какой как регулировочный? Почему?
2.
Двигатели с последовательным возбуждением. Схема включения в сеть этих двигателей
показана на рис. 363. Здесь ток якоря является в то же время и током индуктора,
и потому пусковой реостат изменяет и ток в якоре, и ток в
индукторе. При холостом ходе или очень малых нагрузках ток в якоре, как мы
знаем, должен быть очень мал, т. е. индуцированная э. д. с. должна быть почти равна
напряжению сети. Но при очень малом токе через якорь и индуктор слабо и поле
индуктора. Поэтому при малой нагрузке необходимая э. д. с. может быть получена
только за счет очень большой частоты вращения двигателя. Вследствие этого при
очень малых токах (малой нагрузке) частота вращения двигателя с
последовательным возбуждением становится настолько большой, что это может стать
опасным с точки зрения механической прочности двигателя.
При холостом ходе или очень малых нагрузках ток в якоре, как мы
знаем, должен быть очень мал, т. е. индуцированная э. д. с. должна быть почти равна
напряжению сети. Но при очень малом токе через якорь и индуктор слабо и поле
индуктора. Поэтому при малой нагрузке необходимая э. д. с. может быть получена
только за счет очень большой частоты вращения двигателя. Вследствие этого при
очень малых токах (малой нагрузке) частота вращения двигателя с
последовательным возбуждением становится настолько большой, что это может стать
опасным с точки зрения механической прочности двигателя.
Рис. 363. Схема включения двигателя с последовательным возбуждением
Говорят,
что двигатель идет «вразнос». Это недопустимо, и поэтому двигатели с
последовательным возбуждением нельзя пускать в ход без нагрузки или с малой
нагрузкой (меньшей 20-25 % от нормальной мощности двигателя). По этой же
причине не рекомендуется соединять эти двигатели со станками или другими
машинами ременными или канатными передачами, так как обрыв или случайный сброс
ремня приведет к «разносу» двигателя.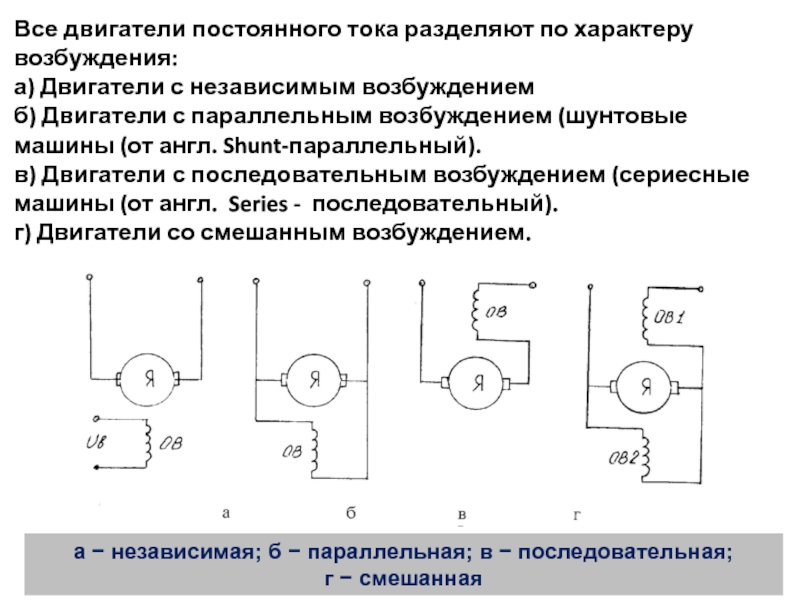 Таким образом, в двигателях с
последовательным возбуждением при возрастании нагрузки увеличиваются ток в
якоре и магнитное поле индуктора; поэтому частота вращения двигателя резко
падает, а развиваемый им вращающий момент резко возрастает.
Таким образом, в двигателях с
последовательным возбуждением при возрастании нагрузки увеличиваются ток в
якоре и магнитное поле индуктора; поэтому частота вращения двигателя резко
падает, а развиваемый им вращающий момент резко возрастает.
Эти свойства двигателей с последовательным возбуждением делают их наиболее удобными для применения на транспорте (трамваи, троллейбусы, электропоезда) и в подъемных устройствах (кранах), так как в этих случаях необходимо иметь в момент пуска при очень большой нагрузке большие вращающие моменты при малых частотах вращения, а при меньших нагрузках (на нормальном ходу) меньшие моменты и большие частоты.
Регулирование
частоты вращения двигателя с последовательным возбуждением производится обычно
регулировочным реостатом, включенным, параллельно обмоткам индуктора (рис.
364). Чем меньше сопротивление этого реостата, тем большая часть тока якоря
ответвляется в него и тем меньший ток идет через обмотки индуктора. Но при
уменьшении тока в индукторе частота вращения двигателя возрастает, а при его
увеличении падает. Поэтому, в отличие от того, что имело место для шунтового
двигателя, для того чтобы увеличить частоту вращения сериесного двигателя,
нужно уменьшить сопротивление цепи индуктора, выводя регулировочный реостат.
Для того чтобы уменьшить частоту вращения сериесного двигателя, нужно увеличить
сопротивление цепи индуктора, вводя регулировочный реостат.
Поэтому, в отличие от того, что имело место для шунтового
двигателя, для того чтобы увеличить частоту вращения сериесного двигателя,
нужно уменьшить сопротивление цепи индуктора, выводя регулировочный реостат.
Для того чтобы уменьшить частоту вращения сериесного двигателя, нужно увеличить
сопротивление цепи индуктора, вводя регулировочный реостат.
Рис. 364. Схема включения реостата для регулирования частоты вращения сериесного двигателя
173.3. Объясните, почему сериесный двигатель нельзя пускать вхолостую или с малой нагрузкой, а шунтовый можно.
Таблица 8. Преимущества, недостатки и области применения двигателей различных типов
Тип двигателя | Основные преимущества | Основные недостатки | Область применения |
Трехфазный двигатель переменного тока с вращающимся полем | 1. Слабая зависимость частоты вращения от нагрузки 2. 3. Применение трехфазного тока | 1. Трудность регулирования частоты вращения 2. Малый вращающий момент при пуске | Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки, но не нуждающиеся в регулировке частоты вращения |
Двигатель постоянного тока с параллельным возбуждением (шунтовый) | 1. Постоянство частоты вращения при изменениях нагрузки 2. Возможность регулирования частоты вращения | Малый вращающий момент при пуске | Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки и возможности регулировать частоту вращения |
Двигатель постоянного тока с последовательным возбуждением (сериесный) | Большой вращающий момент при пуске | Сильная зависимость частоты вращения от нагрузки | Тяговые двигатели в трамваях и электропоездах, крановые двигатели |
 Простота и экономичность
конструкции
Простота и экономичность
конструкцииВ
заключение сопоставим в виде табл. 8 основные преимущества и недостатки
различных типов электродвигателей, рассмотренных нами в этой главе, и области
их применения.
8 основные преимущества и недостатки
различных типов электродвигателей, рассмотренных нами в этой главе, и области
их применения.
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки
ротора и возбуждения подключаются
параллельно к одному источнику питания.
При таком включении ток через обмотку
возбуждения в несколько раз меньше, чем
через ротор. Характеристики электродвигателей
получаются жесткими, позволяющие
использовать их для привода станков,
вентиляторов.
Характеристики электродвигателей
получаются жесткими, позволяющие
использовать их для привода станков,
вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При
этой схеме используются две обмотки
возбуждения, расположенные попарно на
каждом из полюсов электродвигателя. Их
можно подключить так, чтобы потоки их
либо складывались, либо вычитались. В
результате двигатель может иметь
характеристики как у схемы последовательного
или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат r рег, а в цепь якоря — добавочный (пусковой) реостат R п. Характерная особенность ДПТ НВ — его ток возбуждения I в не зависит от тока якоря I я так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n 0 —
частота вращения вала двигателя при
холостом ходе. Δn —
изменение частоты вращения двигателя
под действием механической нагрузки.
Δn —
изменение частоты вращения двигателя
под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n 0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn , обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря R а =∑R + R доб. Поэтому при наименьшем сопротивлении цепи якоря R а = ∑R, когда R доб = 0 , соответствует наименьший перепад частоты вращения Δn . При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если
же хотя бы один из
перечисленных параметров двигателя
изменен (напряжение на обмотках якоря
или возбуждения отличаются от
номинальных значений, или же изменено
сопротивление в цепи якоря введением
R доб ),
то механические характеристики
называют искусственными .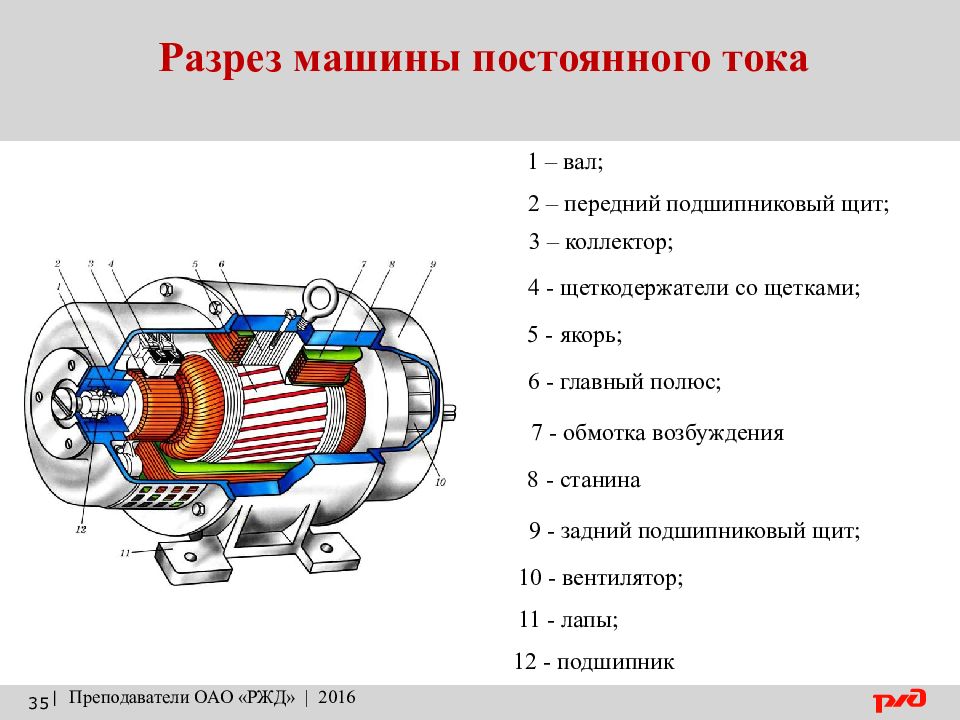
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления R доб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M) . При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора R доб частота вращения уменьшается. Сопротивления резистора R доб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; I я — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n 0 — частота вращения холостого хода, об/мин.
Частота
вращения холостого хода n 0 представляет
собой пограничную частоту
вращения, при превышении которой
двигатель переходит в генераторный
режим.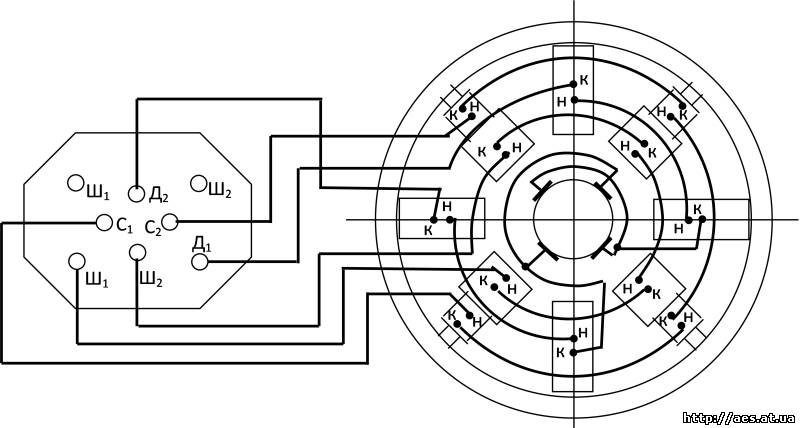 Эта частота вращения превышает
номинальную n ном на
столько, на сколько номинальное
напряжение U ном подводимое
к цепи якоря, превышает ЭДС якоря Е я
ном при
номинальной нагрузки двигателя.
Эта частота вращения превышает
номинальную n ном на
столько, на сколько номинальное
напряжение U ном подводимое
к цепи якоря, превышает ЭДС якоря Е я
ном при
номинальной нагрузки двигателя.
На
форму механических характеристик
двигателя влияет величина основного
магнитного потока возбуждения Ф .
При уменьшении Ф (при
возрастании сопротивления резистора r peг)
увеличивается частота вращения холостого
хода двигателя n 0 и
перепад частоты вращения Δn.
Это приводит к значительному изменению
жесткости механической характеристики
двигателя (рис. 13.13, б). Если же изменять
напряжение на обмотке якоря U (при
неизменных R доб и
R рег),
то меняется n 0 ,
a Δn остается
неизменным [см. (13.10)]. В итоге механические
характеристики смещаются вдоль оси
ординат, оставаясь параллельными друг
другу (рис. 13.13, в). Это создает наиболее
благоприятные условия при регулировании
частоты вращения двигателей путем
изменения напряжения U ,
подводимого к цепи якоря. Такой метод
регулирования частоты вращения получил
наибольшее распространение еще и
благодаря разработке и широкому
применению регулируемых тиристорных
преобразователей напряжения.
Такой метод
регулирования частоты вращения получил
наибольшее распространение еще и
благодаря разработке и широкому
применению регулируемых тиристорных
преобразователей напряжения.
Схемы включения двигателей постоянного тока
| Фиг. 1. Схема включения двигателя постоянного тока параллельного возбуждения. |
| Рис. 66. Схема включения двигателя постоянного тока с независимым возбуждением |
| Рис. 2.2.7. Схемы включения двигателей постоянного тока а — независимого возбуждения б — последовательного возбуждения в — смешанного возбуждения |
 [c.136]
Рассмотрим схему управления двигателем постоянного тока с контроллером КП-2026, приведенную на рис. 6.18. Контроллер имеет дугогасящую катушку МЗ. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]
[c.136]
Рассмотрим схему управления двигателем постоянного тока с контроллером КП-2026, приведенную на рис. 6.18. Контроллер имеет дугогасящую катушку МЗ. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит У В. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже. [c.277]
Измерительным прибором служит мост типа ЭТП-209 со сдвоенным реохордом для включения в систему слежения обратной связи.
 Реохорд задачи программы прибора РУ-5-01 и реохорд обратной связи измерительного прибора ЭТП-209 образуют мостовую схему. При наличии разбаланса в мостовой схеме сигнал поступает в усилительную аппаратуру и на исполнительные органы до устранения в системе разбаланса. Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]
Реохорд задачи программы прибора РУ-5-01 и реохорд обратной связи измерительного прибора ЭТП-209 образуют мостовую схему. При наличии разбаланса в мостовой схеме сигнал поступает в усилительную аппаратуру и на исполнительные органы до устранения в системе разбаланса. Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]С высоким пусковым моментом, большим числом включении в час и регулированием скорости Двигатели постоянного тока последовательного или смешанного возбуждения, иногда с искусственными схемами соединения обмоток Механизмы подъема и передвижения кранов большой производительности и точности, вспомогательные металлургические механизмы, электрическая тяга [c.239]
Двигатели постоянного тока параллельного возбуждения 501, 513 — Пусковая диаграмма 503 — Схема включения 501 — Торможение — Схема 502 —Характеристики 502, 503, 504, 505, 513 [c.708]
Схема электропривода напорного механизма. Этот механизм приводится в действие двигателем постоянного тока ДН, включенным последовательно в цепь якоря генератора напора ГН. Электриче- [c.272]
Схема электропривода поворотного механизма. Для приведения в действие механизма поворота на экскаваторе ЭКГ-4,6 применяются два двигателя постоянного тока 1ДВ и 2ДВ, которые получают питание от генератора поворота ГВ. Электрическая схема управления этим приводом также не отличается от рассмотренной выше схемы привода подъема, за исключением того, что здесь отсутствует узел ослабления поля двигателя. Кроме того, в рассматриваемой схеме предусматривается реле контроля напряжения РП, включенное на падение напряжения в главной цепи (точки 210—240). Это реле включает узел гашения ноля генератора (н. о. контакты 252). [c.273]
Схема электропривода механизма подъема ковша. Подъемная лебедка приводится в действие двигателем постоянного тока ДП (см. рис. 177), включенным последовательно в цепь трехобмоточного генератора подъема ГП. [c.279]
В электроприводе лифтов наиболее часто используют схему включения двигателя с независимым возбуждением (рис. 66). Напряжение и с от источника постоянного тока подводится к зажимам якорной обмотки и Я2, а напряжение и в — к шунтовой обмотке возбуждения двигателя ОВд на зажимы Ш1 и Ш2. [c.106]
В электрических приводах для бесступенчатого изменения скорости вращения шпинделя используется свойство двигателей постоянного тока плавно изменять число оборотов ротора при определенной схеме включения. Однако отсутствие в цехе источников постоянного тока весьма затрудняет использование этого метода на практике. Такая схема регулирования не получила заметного применения и встречается лишь в нескольких моделях токарных автоматов и редко в других моделях станков. [c.24]
Основными обмотками статора двигателя постоянного тока являются шунтовая и сериесная обмотки возбуждения, использующиеся для создания различных схем включения двигателей. [c.125]
Математические модели генераторов и двигателей постоянного тока общеизвестны. Наличие нелинейной характеристики намагничивания и обмотки самовозбуждения генератора усложняет обычную структуру модели генератора. Математическая модель рассматриваемого генератора получается на основе электромагнитных контуров схемы включения. [c.412]
Общий метод расчета механической характеристики двигателей постоянного тока в рассматриваемой схеме (рис. 7-1) включения заключается в нахождении за-, висимостей / =/ (/,1.) и /ц, =/(/я ) и последующем переходе к зависимости n, = f(M,). [c.137]
Тяговые двигатели электровозов переменного тока, которые часто называют двигателями пульсирующего тока, по своей конструкции и схеме включения несколько отличны от обычных двигателей постоянного тока. Для снижения пульсационных потерь в магнитной системе машины обмотки возбуждения постоянно шунтированы активным сопротивлением как показано на рис. 39 и 41. [c.48]
Для управления двигателями постоянного тока, так же как и переменного, можно применять магнитные контроллеры. Схема управления с магнитным контроллером типа П, изображенная на рис. 6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами. [c.280]
В приведенной на рис. 103, б схеме регулятора органом сравнения служит механический дифференциал Д. Сравнение выходного сигнала с МЭП и заданного осуществляется следующим образом. Угловая частота выходного вала 1 дифференциала Др, вращательное движение которого преобразуется винтовой парой 2 в поступательное перемещение ЭИ, зависит от разности угловых частот вращения входных валов дифференциала. Один из этих валов вращается асинхронным двигателем Д с неизменной угловой частотой Шз, а другой (4) — с частотой С04 двигателем постоянного тока, якорь Я которого включен на балластный резистор Я в цепи ГИ— МЭП. Угловая частота выходного вала 1 дифференциала Др [c.178]
Обычно для изменения скорости растяжения образца применяются схемы регулирования числа оборотов электродвигателя постоянного тока с помощью включения в обмотку якоря или обмотку возбуждения управляющего реостата. Включение реостата требует значительного дополнительного расхода электроэнергии в цепи управления. Кроме того, сопротивление реостата ограничивает пределы изменения частоты вращения электродвигателя в области низких значений скорости растяжения, поэтому при такой схеме регулирования приходится использовать электродвигатель с заведомо увеличенной в несколько раз мощностью с тем, чтобы при минимальной частоте вращения получить требуемое значение крутящего момента на валу двигателя и, таким образом, усилие растяжения образца. [c.84]
Выбрав тип и габарит двигателя, намечают по каталогу его механические характеристики— пусковые, тормозные, регулировочные, рабочие, соответственно фиксируя число ступеней пуска, торможения, регулирования скорости. Попутно решают вопрос о роде управления, которое может быть автоматическим, полуавтоматическим, ручным. Последнее в современной практике по условиям производительности, качества продукции, надёжности, расхода энергии и т. п. почти не применяется. Выбирая характеристики двигателя, тем самым намечают схему включения главных цепей двигателя якоря и обмотки возбуждения в машинах постоянного тока, статора и ротора — в асинхронных машинах. [c.3]
Барабанные контроллеры типа КПС и кулачковые контроллеры типа ПКС постоянного тока, предназначающиеся исключительно для управления сериесными электродвигателями механизмов подъёма—спуска, позволяют включать двигатели на положе-. ниях подъёма по нормальной схеме реостатного пуска, а на положениях спуска — по шунтовой схеме, осуществляя тормозной или силовой моменты в зависимости от величины спускаемого груза. В них предусматривается конечное включение вспомогательного тока и допускается присоединение шунтового или сериесного тормозного магнита. [c.851]
Для. быстрой остановки привода может применяться электрическое торможение динамическое или противовключением. На фиг. 3 изображена схема динамического торможения короткозамкнутого двигателя. Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп , которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор Т. Статор подключается к постоянному току от выпрямителя ТВ. Торможение длится в течение выдержки времени реле, пристроенного к контактору. Контакторы Л ж Т сблокированы НЗ блокконтактами. Одновременное включение обоих контакторов могло бы привести к выходу из строя выпрямителя. [c.543]
Вращение от электродвигателя постоянного тока 12 через клиноременную передачу передается гидронасосу 11. Скорость перемещения датчика регулируется изменением подачи масла в гидросистему через число оборотов электродвигателя и эксцентриситет гидронасоса. Гидронасос имеет реверс, что позволяет менять направление перемещения. Масляная магистраль от насоса через кран переключения рода работы 13 подводится к золотнику управления двигателями 8. Золотник перемещается электромагнитами 1 я 2, снабженными микровыключателями 9. Пуск двигателя (схема пуска на рисунке не показана) сблокирован с включением электромагнита 1. При этом золотник 8 перемещается в верхнее положение. [c.244]
С высоким пусковым моментом, большим числом включений в час и регулироианием сио- рости Двигатели постоянного тока последовЭ тельного или смешан кого возбуждения, иногда с искусственными схемами соединения обмоток, а также системы с регулируемым напряжением 1ЮСтоя иного тока Механизмы подъема и передвижения кранов S большой производитель- ности и точности, вело- 1 могательные металлур- i гические механизмы, 1 электрическая тяга [c.126]
Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных Двигателях с переключением полюсов. Выбор между противовключеняем и динамическим торможением зависит от требуемой быстроты торможения и точности остановки при одинаковых исходных токах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля. Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще. [c.8]
Контроллерные диаграммы. Каждая автоматическая схема имеет несколько характерных положений замыкания её элементов. Возьмём для примера нереверсивный сериес-ный двигатель постоянного тока, предназначенный для пуска в одну сторону по трём механическим характеристикам. Схема будет иметь четыре характерных положения включения её автоматических аппаратов а) покой б, в, г) работа на первой, второй и третьей характеристиках. Для уяснения основных условий работы схемы автоматизированного электропривода служит контроллерная диаграмма, Она показывает число типичных положений схемы, число включённых в неё главных аппаратов и какие аппараты включены при каждом положении. Для иллюстрации на фиг. 86 показана схема главной цепи реверсивного сериесного двигателя с двумя парами реверсирующих контакторов, из ко- [c.62]
| Рис. 14.129. Схема автоматического регулирования скорости вращения барабана многоиратного волочилвнопо стана с приводом от двигателей постоянного тока. Двигатели 9 (рис. а) вращают барабаны 4. Проволока 1, огибая барабан, направляется вокруг натяжного ролика 7, затем вокруг холостого ролика 8 и далее через фильер 3 к следующему барабану. Чтобы исключить образование петель и проскальзывание проволоки, натяжной ролик 7 (рис. б), посаженный на ось рычага 15, связанного с зубчатым сектором 12, при повороте смещает ползунок реостата 5, включенного в цепь обмотки возбуждения предшествующего двигателя. Величина натяжения проволоки механически регулируется связанной с роликом 7 пружиной 14. Рычаги 15 и 13 должны располагаться так, чтобы противонатяжение составляло 10—30% от усилия волочения с отклонением не более 10% от принятой величины. |
Рнс. 16. Прннципиаль пая схема включения выпрямителя в цепь тягового двигателя постоянного тока [c.16]
На рис. 14, б представлена схема ПМУ мощностью до 0,5 кет. Схема состоит из питающего однофазного трансформатора Тр с двумя вторичными обмотками 2иЗ, двигателя постоянного тока Д и магнитного усилителя. В магнитный усилитель входят две обмотки управления ОУ и ОУа и две рабочие обмотки ОР и ОР , включенные в плечи выпрямительного моста. Обмотка трансформатора 2 питает цепь якоря двигателя Д, а обмотка 3 питает обмотку возбуждения ОВД двигателя. Выпрямление тока в каждой цепи осуществляется дву хполу пер йодным выпрямителем В1— В4 — в цепи якоря и 1В—4В — в цепи возбуждения. [c.41]
На фиг. 496 показана одна из схем включения двух вентилей, через которые от трансформатора однофазного тока производится питание электроэнергией двигателя постоянного тока. В моменты, когда на вторичной обмотке трансформатора возникает напряжение, которое может вызвать ток от точки а к точке х, фактически ток возникает только в цепи полуобмотка трансформатора о—х, [c.404]
Для автоматического пуска асинхронных двигателей с фазовым ротором или двигателей постоянного тока применяются магнитные контроллеры (контакторные панели), представляющие собой комплект контакторов и реле, соединеннных по определенной схеме. Все сказанное о магнитном пускателе полностью осуществихмо в случае управления электродвигателями с помощью магнитных контроллеров. При напряженном режиме работы, характеризующемся большим числом включений в час, и при значительной мощности двигателя, когда управление с помощью обычного (ручного) контроллера становится затруднительным, применяют магнитные контроллеры. При весьма тяжелых режимах работы кранов, при питании кранов переменным током применя- [c.94]
Электроконтактные регуляторы применяются в двигателях малой мощности. На рис. 31.13 показан электроконтактный регулятор вибрационного действия. В момент включения двигателя ток проходит через замкнутые контакты 3 регу-лятора и подается в цепь питания двигателя. При увеличении частоты вращения сила инерции груза 2 преодолевает силы сопротивления пружин / и 4, отклоняет груз 2 и размыкает контакты 3. Частота вращения якоря уменьшается, вследствие чего контакты вновь замыкаются, и процесс повторяется. Непрерывное замыкание и размыкание контактов дают возможность авто.матически поддерживать угловую скорость Ыср, близкую к постоянной. Изменение задаваемой угловой скорости в этих регуляторах осуществляется подбором элементов электрической схемы. [c.400]
Барабанные контроллеры типа КП и кулачковые контроллеры типа ПК для постоянного тока имеют симметричную схему включения, допускающую присоединение шунто-вого или сериесного тормозного электромагнита, и снабжены дополнительными пальцами для максимально-нулевой и конечной защиты вспомогательного тока. Применяемые преимущественно для управления сериесными двигателями в механизмах передвижения и поворота (вращения поворотной части грузоподъёмных машин), они используются также для управления шунтовыми и компаундными двигателями для механизмов подъёма груза они применяться не могут, за исключением случаев привода механизмов шунтовыми электродвигателями. [c.851]
На автомобилях с генераторами постоянного тока присоединение на массу обмотки дополнительного реле осуществляется через обмотку якоря генератора, что обеспечивает электрическую блокировку стартера, предупреждая ошибочное включение последнего на работающий двигатель (во время работы двигателя оба конца обмотки дополнительного реле находятся под одним и тем же напряжением). При этой схеме отказ в работе дополнительногог реле может быть вызван нарушением контакта в цепи якоря генератора, например вследствие заедания щетки в щеткодержателе. Проверка осуществляется непосредственным соединением вывода обмотки дополнительного реле с массой, минуя генератор. [c.46]
Машины постоянного тока.
Трафарет Visio Машины постоянного тока.
Машины постоянного тока — примеры условных обозначений.
Для фигуры Visio Машина постоянного тока, тип машины меняется в таблице данных фигуры.
Ниже показаны полученные примеры условных обозначений. Для символов генератора, обозначения аналогичны, только происходит замена символа M на символ G.
Двигатель постоянного тока с последовательным возбуждением.
Двигатель постоянного тока с параллельным возбуждением.
Двигатель постоянного тока со смешанным возбуждением.
Двигатель постоянного тока с независимым возбуждением.
Двигатель постоянного тока с обмотками последовательного и независимого возбуждения.
Двигатель постоянного тока с возбуждением от постоянных магнитов.
Для любого из условных обозначений машины, в контекстном меню фигуры, можно показать или скрыть символы щеток, например:
Двигатель постоянного тока с возбуждением от постоянных магнитов
Генератор постоянного тока со смешанным возбуждением.
Изменение символа машины постоянного тока, видео:
Для фигуры Visio, упрощенного условного обозначения двигателя постоянного тока, через контекстное меню фигуры, можно показать или скрыть защитный провод заземления и символ заземления корпуса электрической машины, например:
Двигатель постоянного тока.
Двигатель постоянного тока с защитным проводом заземления.
Двигатель постоянного тока с защитным проводом заземления и заземленным корпусом.
Пример трансформации символа упрощенного условного обозначения двигателя, посмотреть на видео:
Элементы условного обозначения машины постоянного тока.
Кроме фигур условных обозначений машин постоянного тока, в трафарет включены фигуры отдельных элементов машин. Предназначены они для построения электрических схем машин постоянного тока.
Якорь машины постоянного тока (символы щеток можно скрыть в контекстном меню фигуры). Обмотка вспомогательного полюса по продольной оси. Обмотка вспомогательного полюса по поперечной оси. Обмотка компенсационная. Обмотка добавочного полюса. Обмотка последовательного возбуждения. Обмотка параллельного возбуждения. Обмотка независимого возбуждения.Пример схемы, составленной с помощью отдельных элементов:
Схема двигателя постоянного тока.
Составление схемы двигателя постоянного тока с помощью отдельных элементов — видео:
Двигатели постоянного тока с различными системами возбуждения
Страница 7 из 30
Существует две системы возбуждения двигателей постоянного тока: возбуждение от постоянных магнитов; возбуждение от сети, питающей двигатель.
Наиболее распространена вторая система возбуждения. Двигатели с возбуждением от сети встречаются трех видов: с параллельным, последовательным и смешанным возбуждением. Рассмотрим двигатели с наиболее распространенными системами возбуждения.
Рис. 49. Характеристики двигателя параллельного возбуждения:
а — скоростная; б — моментная; ев— к.п.д.; г — механические.
Двигатель с параллельным возбуждением и его характеристики. Обмотка возбуждения двигателя располагается на основных полюсах и включается параллельно с якорем в сеть (рис. 48). Электрическую энергию двигатель получает от сети через рубильник 4 и преобразует ее в механическую энергию, которая используется рабочей машиной 3.
Рис. 48. Схема включения двигателя параллельного возбуждения:
1— якорь; 2 — обмотка возбуждения; 3 — рабочая машина; 4 — рубильник; 5— реостат в цепи якоря; 6 — реостат в цепи возбуждения.
Механическая характеристика двигателя — зависимость частоты вращения от момента при низменных напряжении и токе возбуждения, а также при постоянном добавочном сопротивлении в цепи якоря. При отсутствии добавочного сопротивления в якорной цепи получается естественная характеристика. Свойство механических характеристик при различных сопротивлениях в якорной цепи показано на рисунке 49, г.
1— якорь; 2 — обмотка возбуждения; 3— рабочая машина; 4 — рубильник; 5 — реостат в цепи якоря.
Рис. 51. Характеристики двигателя последовательного возбуждения:
а — скоростная, б — моментная; I в — к. п. д.; г — механические.
Рис. 50. Схема включения двигателя последовательного возбуждения:
Двигатель с последовательным возбуждением и его характеристики. Обмотка возбуждения двигателя располагается на основных полюсах и включается последовательно с якорем в сеть (рис. 50).
Скоростная характеристика — зависимости частоты вращения якоря от полезной мощности на валу при неизменном напряжении якорной цепи. В двигателе последовательного возбуждения ток якоря является одновременно и током возбуждения; с увеличением ток; якоря растет магнитный поток машины. При увеличении полезной мощности на валу частота вращения уменьшается главным образом из-за увеличения магнитного потока, а также из-за падения напряжения в якорной це Пи (см. формулу 67). Скоростная характеристика показана на рисунке 51, а. Двигатель последовательного возбуждения нельзя включать без нагрузки, так как часто та вращения в этом случае может достигнуть опасно; величины.
Моментная характеристика — зависимости момента от полезной мощности на валу при неизменной напряжения якорной цепи (рис. 51,б). Момент двигателя увеличивается прямопропорционально току якоря и потоку, а поток зависит от тока. В двигателе последовательного возбуждения момент изменяется почти пропорционально квадрату тока.
Рис. 52. Схема включения двигателя смешанного возбуждения:
Характеристика к. п. д.— зависимость к. п. д. от полезной мощности на валу при неизменном напряжении якорной цепи (рис. 51,в). Эта характеристика аналогична характеристике двигателя параллельного возбуждения.
1— якорь; 2 — параллельная обмотка возбуждения;
3 — последовательная обмотка возбуждения; 4 — рабочая машина; 5— рубильник; 6— реостат в цепи якоря; 7 — реостат в цепи параллельной обмотки возбуждения.
Механическая характеристика — зависимость частоты вращения от момента при неизменном напряжении якорной цепи (по форме напоминает скоростную характеристику). Семейство механических характеристик показано на рисунке 51, г.
Двигатель смешанного возбуждения и его характеристики.
Параллельную и последовательную обмотки возбуждения двигателя располагают на основных полюсах. Схема включения двигателя смешанного возбуждения сказана на рисунке 52. В двигателе смешанного возбуждения магнитный поток машины создается двумя обмотками:
(68)
де Фш и Фс—соответственно потоки параллельной и последовательной обмоток.
Обмотки возбуждения можно включать согласно, в том случае потоки складываются, при встречном включении — поток последовательной обмотки вычитается из потока параллельной обмотки.
Наиболее распространенным является согласное включение обмоток возбуждения. При этом характеристики двигателя занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения, но ближе к первым.
Регулирование частоты вращения двигателей
Из формулы 67 следует, что частоту вращения двигателей можно менять изменением напряжения на якорь (якорной цепи) и изменением потока.
При введении добавочного сопротивления в якорную цепь частота вращения уменьшается. При уменьшении потока частота вращения растет.
В двигателе параллельного возбуждения поток можно уменьшить введением сопротивления в цепь возбуждения.
В двигателях последовательного возбуждения поток можно уменьшить шунтированием обмотки возбуждена а увеличить шунтированием обмотки якоря. Частоту вращения двигателей постоянного тока можно плавно peгулировать в широких пределах при высоком к. п. д. — это их главное преимущество перед асинхронными двигателями.
Потери в машинах постоянного тока
Суммарные потери в машине постоянного тока выражаются формулой:
(691
где Рмах— механические потери, Вт; рс—потери в стали, Вт; рм—потери в меди якоря, Вт; рв—потери в обмотках возбуждения, Вт; рщ— потери в щетках, Вт; рд—добавочные потери, Вт.
Коэффициент полезного действия может быть определен по формуле 44.
Двигатель постоянного тока с параллельным возбуждением
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
Схема электродвигателя рассматриваемого типа изображена ниже.
- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.
Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
Что такое двигатель постоянного тока — эквивалентная цепь якоря
A Двигатель — это машина, преобразующая электрическую энергию в механическую. С точки зрения конструкции нет разницы между двигателем постоянного тока и генератором постоянного тока. Единственное отличие состоит в том, что генераторы обычно эксплуатируются в более защищенных местах и, следовательно, их конструкция, как правило, открытого типа.
С другой стороны, двигатели обычно используются в местах, где они подвергаются воздействию пыли, влаги, дыма и механических повреждений.Таким образом, двигатель требует защитных кожухов.
Например — Двигатель требует каплезащищенного, огнестойкого и т. Д. Кожуха в соответствии с требованиями. Двигатели постоянного тока очень полезны там, где требуется широкий диапазон скоростей и хорошее регулирование скорости, например, в системе электрической тяги.
Поскольку конструкция двигателя постоянного тока аналогична генератору постоянного тока, который обсуждается в теме «Строительство генератора постоянного тока». Таким образом, для получения информации о конструкции двигателя постоянного тока обратитесь к приведенной ниже ссылке.Существуют различные типы двигателей постоянного тока. Это параллельный двигатель, последовательный двигатель и составной двигатель.
См. Также: Строительство генератора постоянного тока
Уравнение ЭДС двигателя постоянного тока определяется уравнением, показанным ниже:
Где,
- E b — наведенная ЭДС двигателя
- Н — это скорость
- P — количество полюсов
- ϕ — поток на полюс.
- Z — общее количество проводников
- A — количество параллельных путей
Якорь двигателя постоянного тока может быть представлен эквивалентной схемой.Он может быть представлен тремя последовательно соединенными элементами E, Ra и Vb. Элемент E — это обратная ЭДС, Ra — сопротивление якоря, Vb — падение напряжения на контакте щетки.
Эквивалентная схема якоря двигателя постоянного тока показана ниже:
В двигателе постоянного тока ток течет из линии в якорь против генерируемого напряжения. Применяя КВЛ,
Где,
- В — Напряжение на клеммах двигателя
- E b — Задняя ЭДС
- I a — Ток якоря
- R a — Сопротивление цепи якоря
Приведенное выше уравнение (1) называется основным уравнением двигателя.Видно, что обратная ЭДС двигателя всегда меньше, чем напряжение на его клеммах V. Уравнение также можно записать, как показано ниже:
Уравнение (2) считается или применимо, когда также учитывается падение напряжения V b в щетках.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших конструкций электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились.Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются путем простого переключения их проводов, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема — один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
.Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на основе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противодействует крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как будто он питается от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в оставшееся время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — это изменение тока, подаваемого через катушку возбуждения или через якорь.Скорость выходного вала изменится при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря, чтобы уменьшить скорость, или увеличивать сопротивление статора, чтобы увеличить его, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока может быть сложно указать из-за их разнообразия, поэтому список вопросов ниже будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинального напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой постоянный ток может подавать контроллер и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость — одно из их самых сильных преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставлять простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
Лучшие и важные методы управления
В период 18 -го и -го века произошла эволюция двигателей постоянного тока.Развитие двигателей постоянного тока значительно расширилось, и они находят широкое применение во многих отраслях промышленности. В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает от постоянного тока, преобразуя полученную электрическую энергию в механическую. Это вызывает изменение вращения в самом устройстве, обеспечивая, таким образом, мощность для работы различных приложений в нескольких областях.
Регулировка скорости двигателя постоянного тока — одна из наиболее полезных функций двигателя. Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм управления скоростью применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещается в магнитное поле, на него действует механическая сила. В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком, создаваемым обмотками возбуждения в одном направлении, либо нейтрализует магнитный поток, обусловленный обмотками возбуждения. Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС.Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Почему важно регулировать скорость двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы. Во время сверления каждый материал имеет свою собственную скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии насосных установок будет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Управление скоростью двигателя постоянного тока осуществляется либо вручную рабочим, либо с помощью любого автоматического управляющего инструмента. Это, по-видимому, контрастирует с ограничением скорости, при котором необходимо регулирование скорости, препятствующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — скорость двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
i.е., N = (PZ / 60A) (V — IaRa) / ø
Вышеприведенное уравнение также можно записать как:
N = K (V — IaRa) / ø, K — постоянная
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения якоря.
- Скорость двигателя обратно пропорциональна потоку из-за полевых выводов.
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и изменяя ток через обмотку возбуждения.
- Изменяя напряжение якоря и изменяя сопротивление якоря
Множественные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как серийных, так и параллельных двигателей постоянного тока.
Управление скоростью двигателя постоянного тока в серии типов
Его можно разделить на два типа, а именно:
- Техника с управлением якорем
- Техника с полевым управлением
Техника с управлением якорем далее подразделяется на три типа
- Якорь контролируемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Управляемое сопротивление якоря
Этот метод наиболее широко используется там, где регулирующее сопротивление последовательно соединено с сопротивлением источника питания двигателя.Изображение ниже объясняет это.
Контроль сопротивления якоряПотери мощности, которые происходят в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, потому что этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.
Метод управления скоростью двигателя постоянного тока с шунтированным якоремНапряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута путем подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника с полевым управлением далее подразделяется на два типа:
- Полевой дивертер
- Управление задействованным полем (управление полем с отводом)
Техника полевого дивертора
В этом методе используется дивертор. Скорость потока, проходящего через поле, можно уменьшить, шунтируя некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Регулировка скорости двигателя постоянного тока с дивертором поляРегулирование ответвленного поля
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, что достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток. Здесь убирают количество ответвлений в обмотке возбуждения и этот прием используется в электрических тягах.
Управление скоростью параллельного двигателя постоянного тока
Его можно разделить на два типа:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный Поток, создаваемый обмотками возбуждения, изменяется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока
С помощью этого метода скорость двигателя постоянного тока можно регулировать путем управления сопротивлением якоря для управления падением напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре уменьшается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для шунтирующего двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем и может быть синхронным или асинхронным.Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M, изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, так что уровень напряжения якоря изменяется от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и потоку поля до достижения номинальной скорости. И поскольку мощность является произведением скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь, в функциональности, ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение.
Один из таких методов управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда). .
Преимущества и недостатки методики Уорда Леонарда d:
Преимущества использования техники Уорда Леонарда для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавно для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с интенсивным возбуждением действует как привод, поэтому будет происходить приращение коэффициента мощности
- Когда есть импульсная нагрузка, приводным двигателем является асинхронный двигатель, имеющий маховик, который используется для уменьшения мгновенной нагрузки до минимального уровня.
Недостатки метода Уорда Леонарда:
- As, потому что этот метод имеет комплект двигателя и генератора, стоимость более
- Устройство сложное по конструкции и имеет большой вес
- Требуется больше места e для установки
- Требуется регулярное техническое обслуживание, фундамент не рентабелен
- Будут огромные потери, поэтому эффективность системы снизится
- Возникает больше шума
И применение метода Уорда Леонарда плавное регулирование скорости в двигателе постоянного тока.Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым методом является регулирование скорости двигателя постоянного тока с использованием ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжениемНа приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя. Изменение импульсов осуществляется микроконтроллером с входным сигналом от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Итак, в этой статье дается подробное объяснение различных методов управления скоростью двигателя постоянного тока и того, как наиболее важно соблюдать управление скоростью. Кроме того, рекомендуется знать о контроллере скорости двигателя 12 В постоянного тока.
7 фактов о контроллере двигателя постоянного тока
Что такое контроллер двигателя постоянного тока?
Контроллер двигателя постоянного тока (постоянный ток) — это особый тип электрического устройства, которое преобразует электрическую энергию в механическую.Двигатели постоянного тока получают электроэнергию, используя постоянный ток, а затем преобразуют эту энергию в автоматическое вращение.
Двигатели постоянного тока есть почти везде. Они используют магнитное поле, создаваемое генерируемым током. Эти токи являются токами, которые приводят в движение ротор, закрепленный на выходном валу. Скорость и выходной крутящий момент зависят как от конструкции двигателя, так и от входной мощности.
Как работает контроллер двигателя постоянного тока?
Двигатели постоянного токаразличаются по мощности и размеру.Вы можете найти значительные механизмы, используемые для подъема подъемников и лифтов, механических транспортных средств, к маленьким, найденным в игрушках. Но опять же, как работает двигатель постоянного тока? Двигатели постоянного тока состоят из двух основных частей: якоря и статора. Статор — это постоянная часть двигателя, а якорь — это вращающаяся часть.
В двигателе постоянного тока используются стационарные наборы магнитов, установленных в статоре, в дополнение к катушке с проводом. В петле из проволоки протекает ток, который создает выровненное электромагнитное поле.Одна или несколько обмоток изолированного провода наматываются вокруг сердечника двигателя с целью концентрации магнитного поля.
Обмотки изолированного провода подключаются к поворотному электрическому переключателю (коммутатору), который подает электрический ток на обмотки катушки. Вращающийся электрический переключатель позволяет каждой катушке якоря запитаться, создавая крутящий момент или постоянную вращающую силу.
При последовательном включении и выключении катушек создается магнитное поле, которое взаимодействует с различными участками неподвижных магнитов, создавая крутящий момент.Эти фундаментальные принципы работы позволяют двигателям постоянного тока преобразовывать электрическую энергию постоянного тока в механическую, которую можно использовать для силового оборудования. Все это за счет вращательного движения.
Кто изобрел контроллер двигателя постоянного тока?
Двигатель постоянного тока — это выдающееся электрическое устройство, которое произвело революцию в жизни людей во многих отношениях. Но кто был изобретателем двигателя постоянного тока? Как и во всех остальных нововведениях, есть множество людей, которые сыграли свою роль в разработке другого оборудования.
В США Томас Давенпорт был изобретателем первого электродвигателя. Давенпорт был первым человеком, который пошел дальше и подал заявку на патент на пригодный для использования электродвигатель. Это было еще в 1837 году. Однако Давенпорт не был первым человеком, который построил электродвигатель, поскольку другие изобретатели в Европе разработали более мощную версию ранее.
Причина, по которой он хвалил Давенпорта как первого изобретателя, заключается в том, что он ранее подал заявку на патент. В 1834 году Якоби Мориц уже представил очень мощный двигатель (в три раза более мощный), чем у Давенпорта.Год спустя Сибрандус Стратинг и Кристофер Беккер продемонстрировали практическое применение электродвигателя.
Типы контроллеров двигателей постоянного тока и управления двигателями постоянного тока
Стоит знать несколько типов двигателей постоянного тока. До сих пор в этом руководстве подробно объяснялось, что такое двигатели постоянного тока, их функции и история. На этом этапе мы рассмотрим типы двигателей постоянного тока. Короче говоря, существует четыре основных типа двигателей постоянного тока, как показано ниже:
Бесщеточные двигатели постоянного тока
Они также называются синхронными двигателями постоянного тока или двигателями с электронной коммутацией.Основное отличие этих типов двигателей от остальных в том, что в них отсутствует коммутатор. Однако его заменяет сервомеханизм, который может определять и впоследствии регулировать угол поворота ротора. Бесщеточные двигатели постоянного тока долговечны и безопасны.
Электродвигатели постоянного тока с щетками
Это оригинальные двигатели постоянного тока, разработанные компанией Sprague. Хотя они остаются популярными для бумагоделательных машин, кранов и прокатных станов, в последнее время их популярность уменьшается.
Параллельные двигатели постоянного тока
Это тип щеточных двигателей с подключением обмоток возбуждения параллельно якорю.У них меньший ток за счет параллельности обмоток. Шунтовые двигатели находят широкое применение в нескольких приложениях, где требуется постоянный крутящий момент. Больше всего от них полагаются смесители, конвейерные ленты и подъемники.
Двигатели постоянного тока серииЭто последняя разновидность. Последовательное соединение обмоток возбуждения отличает их от параллельных двигателей. Следовательно, это означает, что ток якоря действительно проходит через обмотку возбуждения, создавая гораздо более высокие скорости. Серийные двигатели постоянного тока идеально подходят для задач, требующих высокого пускового момента.
Наиболее распространенные методы управления двигателем постоянного тока:
Регулятор направления: H-мост
H мостовая схема является одним из простейших способов управления двигателем постоянного тока. Здесь вы найдете четыре переключателя, управляемых попарно. Когда любая из этих пар замыкается, они немедленно замыкают цепь и впоследствии приводят в действие двигатель. H-мост также может контролировать скорость.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
ЦепиШИМ изменяют скорость двигателя, моделируя увеличение или уменьшение напряжения питания.ШИМ легко и недорого применять, аспект, который позволяет непрерывно контролировать скорость двигателя. Здесь вы найдете контроллеры привода с регулируемой скоростью, которые работают, отправляя на двигатель периодические импульсы. Когда индуктивность катушки с использованием обычного импульса дает некоторый эффект сглаживания привязки, электродвигатель работает как от высокого или низкого напряжения.
Контроллер якоря: переменное сопротивление
Это еще один способ воздействия на скорость двигателя постоянного тока. Здесь изменяется ток, протекающий через якорь или катушку возбуждения.Если вам интересно, вы заметите, что скорость выходного вала изменяется при изменении тока катушек. Переменные резисторы могут изменять ток, чтобы вы могли увеличить скорость.
Что нужно знать при покупке двигателей постоянного тока
Купить двигатели постоянного тока очень просто. Все, что вам нужно сделать, это найти своего поставщика, заключить сделку, заплатить за нее и забрать товар, верно? Если вы так думаете, то ошибаетесь. Перед покупкой двигателей постоянного тока необходимо учесть несколько важных моментов.Вот несколько важных факторов, которые следует учитывать:
НапряжениеЧем выше энергия, тем выше крутящий момент. Энергия поддерживает чистый ток в одном направлении. Обязательно проверьте рекомендованное натяжение двигателя постоянного тока в инструкции по эксплуатации. Если таковой не хватает, отправляйтесь в другое место.
Текущий
Ток питает двигатель, и слишком большая его часть опасна, так как может повредить двигатель. Перед покупкой убедитесь, что вы знаете рабочий ток и ток остановки вашего контроллера двигателя постоянного тока.
Скорость
Скорость несколько сложна, когда дело касается двигателей. Двигатели эффективно работают на высоких скоростях, но это невозможно при необходимости переключения передач. Добавление передач не ограничивает эффективность двигателя. Следовательно, вам нужно также учитывать снижение крутящего момента и скорости.
Материал печатной платы в них
Тип материала печатной платы, используемого при производстве двигателей постоянного тока, имеет значение. Выбор двигателей постоянного тока, состоящих из печатных плат из некачественных материалов, сопряжен с риском для управления двигателями постоянного тока.
Почему выбирают двигатель постоянного тока?
Хотя у вас есть возможность использовать двигатели переменного тока, настоятельно рекомендуется использовать двигатель постоянного тока в качестве первого выбора. Но почему, спросите вы. Двигатели постоянного тока обладают рядом преимуществ по сравнению с двигателями переменного тока. Например, они отлично подходят, когда вам нужен высокий пусковой крутящий момент, направленный на движение высокоинерционных нагрузок. Кроме того, в отличие от двигателей переменного тока, легко контролировать скорость двигателей постоянного тока.
Двигатели постоянного токатакже идеальны, когда им требуется питание от источников постоянного тока низкого напряжения, таких как солнечные панели или аккумулятор.Если вы хотите быстро изменить направление вращения, вы найдете двигатели постоянного тока, идеально подходящие для ваших приложений. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Области применения контроллера двигателя постоянного тока
Поскольку сейчас на рынке представлены различные двигатели постоянного тока, мы широко их используем. Дома двигатели постоянного тока находят применение в игрушках, инструментах и другой бытовой технике. В промышленном секторе их требования включают в себя переходы от поворотных столов к конвейерам и реверсирование, чтобы упомянуть лишь некоторые из них.Ниже приведены лишь некоторые области применения контроллеров двигателей постоянного тока:
Для насосов
Двигатели постоянного токаиспользуются для приведения в действие насосов благодаря их отличной реакции при движении и легкости регулирования скорости.
В вентиляторах
Им отдают предпочтение вентиляторы из-за их энергосберегающего механизма.
Для игрушек
При большом разнообразии напряжений игрушки с двигателем постоянного тока требуют различных типов движения и скорости.
Для электромобилей
Двигатели постоянного тока, предназначенные для электромобилей, предпочтительнее из-за их долговечности и энергоэффективности.
Для электровелосипедов
Электровелосипеды имеют двигатели постоянного тока, расположенные в ступицах заднего и переднего колеса, чтобы обеспечить требуемые уровни мощности и крутящего момента.
Сводка
Без сомнения, не будет конца и конца тому, когда прекратится использование контроллеров двигателей постоянного тока. Они продолжают находить применение в нескольких приложениях, несмотря на жесткую конкуренцию со стороны современных и интеллектуальных устройств. На рынке представлены четыре типа двигателей постоянного тока. Все они содержат печатные платы.Без печатных плат контроллеры двигателей постоянного тока не будут работать должным образом. Печатные платы являются сердцем контроллеров двигателей постоянного тока.
Вы ищете лучшие печатные платы для контроллеров двигателей постоянного тока? Не смотрите дальше, чем произведенные WellPCB. У нас есть одни из лучших на рынке печатных плат для контроллеров двигателей постоянного тока. Позвоните нам сегодня, чтобы узнать, как мы можем вам помочь.
Как управляются двигатели постоянного тока? — Контроль скорости двигателей постоянного тока
Электродвигателипостоянного тока питаются от постоянного тока.Они имеют широкий спектр применения в таких продуктах, как бытовая техника, автомобили и фабрики. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Во-первых, электродвигатель — это машина, которая использует электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую.Электродвигатели в общих чертах делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
переменного тока приводятся в движение переменным током, а шаговые двигатели — импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока.Щеточные двигатели постоянного тока имеют катушки в роторе и изменяют способ протекания тока через катушки на основе механизма, использующего коммутаторы и щетки. Щеточные двигатели постоянного тока генерируют электрический и акустический шум и требуют частого обслуживания, поскольку их щетки и коммутатор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если регулирование скорости не требуется.
Бесщеточный двигатель постоянного тока, напротив, избавляет от необходимости в коммутаторе и щетках за счет наличия постоянного магнита в роторе.Это, однако, означает, что они требуют схемы возбуждения. Они также отличаются низкими эксплуатационными расходами, тихой работой и долгим сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании из-за легкости изменения их скорости. Итак, как этого добиться на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящего момента-скорости, которая наклоняется вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси.Скорость максимальна при отсутствии нагрузки, снижаясь вправо до достижения максимального крутящего момента при нулевой скорости.
Крутящий момент и скорость меняются в зависимости от нагрузки, как показано этой кривой крутящего момента-скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличивается до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогично, если крутящий момент нагрузки затем увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на соотношение между крутящим моментом и током показывает, что они пропорциональны друг другу.Отношение между ними является постоянным для двигателя, причем соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения силы тока двигателя достаточно для определения крутящего момента двигателя.
Кривая крутящего момента-скорости двигателя постоянного тока и крутящего момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящего момента-скорости при изменении напряжения, используемого для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений.Удвоение напряжения привода увеличивает вдвое как скорость двигателя без нагрузки, так и пусковой крутящий момент (крутящий момент, когда двигатель заблокирован в положении). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость параллельно вверх. Кривая крутящего момента-скорости для двигателя постоянного тока может быть отрегулирована по желанию путем изменения напряжения, подаваемого на двигатель.
Кривая напряжения и крутящего момента привода двигателя
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как можно вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая крутящего момента двигателя постоянного тока преобразуется с изменениями напряжения привода.Это означает, что вышеуказанная цель может быть достигнута путем простой регулировки напряжения возбуждения. Если посмотреть на график ниже, если требуется вращение со скоростью ω1, когда крутящий момент нагрузки равен T0, например, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 является правильным для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, двигатель постоянного тока может вращаться с желаемой скоростью независимо от момента нагрузки.
Методы управления напряжением привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя в качестве последовательно подключенного переменного резистора можно использовать транзистор или другое полупроводниковое устройство, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводник), и поэтому в наши дни он редко используется.
Альтернативный способ — управление ШИМ. Напряжение, подаваемое на двигатель, можно изменять путем включения и выключения полупроводникового переключателя (например, транзистора или полевого транзистора) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-контроль
Контроль скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока.Однако требуется дополнительное управление, чтобы двигатель работал с постоянной скоростью. Это связано с тем, что крутящий момент двигателя изменяется из-за самой нагрузки, а также других факторов, таких как температура, влажность и изменения во времени. Простое управление двигателем с постоянным напряжением приведет к колебаниям его скорости при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки.На приведенном ниже графике показан пример, в котором момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае уменьшение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, поддержание постоянной скорости двигателя ω0 требует увеличения напряжения привода до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и желаемой скоростью двигателя (погрешность скорости), и напряжение привода регулируется таким образом, что оно увеличивается, если скорость слишком низкая, и уменьшается, если скорость слишком высокая.Это позволяет поддерживать постоянную скорость двигателя. В то время как в прошлом для управления напряжением привода использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Принципиальная схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
- Датчик скорости
Выводит сигнал, указывающий скорость двигателя. Для этого используются датчики на эффекте Холла, энкодеры и тахогенераторы.
- Схема определения скорости
Рассчитывает скорость двигателя по сигналу датчика скорости.
- Задание скорости
Выводит заданную скорость двигателя.
- Компаратор
Вычисляет разницу между заданной скоростью и измеренной скоростью.
- Схема расчета управляющего напряжения
Рассчитывает напряжение привода двигателя на основе вычисленной ошибки скорости.
- Цепь привода
Схема, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
Двигатель постоянного тока может достигать стабильной работы, контролируя его скорость, чтобы оставаться постоянной независимо от изменений нагрузки.Эти двигатели также подходят для самых разных методов управления, которые можно реализовать с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой частоты вращения
Двигателипостоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящего момента-скорости, в которой скорость и крутящий момент нагрузки обратно пропорциональны.Эта кривая крутящего момента-скорости транслируется с изменениями напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, можно заставить его работать с любой скоростью независимо от момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление. ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение путем включения и выключения полупроводникового переключателя с высокой скоростью таким образом, чтобы изменение ширины импульса включения и выключения изменяло напряжение.
Преодоление проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, которые включают системы привода и управления, а также механическую конструкцию. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым для различных отраслей промышленности, приложений и продуктов клиентов, а также для конкретных производственных условий.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних этапах разработки. Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или чертежей, но нужна консультация по двигателям?
- У вас нет сотрудников, имеющих опыт работы с двигателями, и вы не можете определить, какой двигатель лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и передать на аутсорсинг приводные системы и разработку двигателей?
- Хотите сэкономить время и силы, связанные с изменением конструкции существующих механических компонентов при замене двигателя?
- Уникальное требование
- Нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался от него?
- Не можете найти двигатель, который дает вам необходимый контроль, и вот-вот теряете надежду?
Ищете ответы на эти проблемы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Двигатель постоянного тока
Двигатель постоянного токаДалее: Рабочие примеры Up: Магнитная индукция Предыдущая статья: Двигатель переменного тока В установившемся режиме двигатель переменного тока всегда вращается с частотой смены источника питания. Таким образом, двигатель переменного тока, питаемый от бытовой сети, вращается с частотой 60 Гц в США и Канада, а также 50 Гц в Европе и Азии.Предположим, однако, что нам необходим электродвигатель с регулируемой скоростью . Мы всегда могли использовать двигатель переменного тока, приводимый в действие источником переменного тока переменной частоты, но такая мощность расходные материалы очень дорогие. Намного дешевле Альтернативой является использование двигателя постоянного тока с питанием от источника постоянного тока. Разрешите нам исследуйте двигатели постоянного тока.
Двигатель постоянного тока состоит из тех же основных элементов, что и электрический генератор постоянного тока: , то есть , многооборотная катушка, которая может свободно вращаться в постоянном магнитном поле. поле.Кроме того, вращающаяся катушка подключена к внешней цепи. точно так же, как и в генераторе постоянного тока: , т.е. , через разъемное кольцо коммутатор, который меняет полярность катушки относительно внешняя цепь всякий раз, когда катушка проходит через перпендикулярную плоскость к направлению магнитного поля. Предположим, что внешний источник постоянного напряжения ЭДС (, например, , аккумулятор или генератор постоянного тока) подключена к двигателю. Источник напряжения управляет постоянным током вокруг внешнего цепь, и через мотор.Поскольку ток течет по катушке, магнитное поле оказывает на катушку крутящий момент, который заставляет ее вращаться. Предположим, что двигатель в конце концов достигает установившегося вращения. частота . Вращающаяся катушка генерирует обратную ЭДС, величина прямо пропорциональна частоте вращения [см. (222)].
На рисунке 44 показана рассматриваемая схема.Мотор смоделирован
как резистор, который представляет внутреннее сопротивление
мотор, включенный последовательно с противо-ЭДС. Конечно, обратная ЭДС
действует в направлении, противоположном внешней ЭДС. Применение Ома
закон вокруг цепи дает
| (228) |
который дает
| (229) |
Скорость, с которой двигатель выполняет механическую работу, равна
| (230) |
Предположим, что двигатель постоянного тока подвергается небольшой внешней нагрузке, так что только должен выполнять механическую работу с относительно низкой скоростью.В таком случае, мотор будет раскручиваться до тех пор, пока его противо-ЭДС не станет немного меньше чем внешняя ЭДС, так что через двигатель [согласно формуле. (229)], и, следовательно, механический выходная мощность двигателя относительно низка [согласно формуле. (230)]. Если нагрузка на двигатель увеличится, тогда двигатель замедлится, так что его уменьшается противоэдс, увеличивается ток, протекающий через двигатель, и, следовательно, механическая выходная мощность двигателя увеличивается до тех пор, пока он соответствует новой нагрузке.Обратите внимание, что текущий текущий через двигатель постоянного тока обычно ограничивается обратной ЭДС, а не внутреннее сопротивление мотора. Фактически, обычные двигатели постоянного тока спроектированы в предположении, что противо-ЭДС всегда будет ограничивать ток, протекающий через мотор на сравнительно небольшую стоимость. Если мотор заклинивает, так что катушка останавливается вращается, и обратная ЭДС падает до нуля, тогда ток, который потоки через двигатель, как правило, настолько велики, что могут сжечь двигатель если позволить течь в течение любого значительного периода времени.По этой причине, мощность электродвигателя всегда следует немедленно отключать, если двигатель заклинивает. Когда двигатель постоянного тока запускается, катушка сначала вращается недостаточно быстро, чтобы генерируют значительную обратную ЭДС. Таким образом, есть небольшой промежуток времени, сразу после включения двигателя, при котором двигатель тянет относительно большой ток от его источника питания. Это объясняет, почему огни в доме иногда временно тускнеет, когда большой двигатель, такой как двигатель кондиционера включен.
Предположим, что двигатель постоянного тока подвергается постоянной, но относительно небольшой нагрузке. Как упоминалось выше, мотор будет раскручиваться до тех пор, пока его обратная ЭДС почти не соответствует внешней ЭДС. Если внешняя ЭДС увеличена, то мотор будет расти дальше, пока его обратная ЭДС не будет соответствовать новому внешнему ЭДС. Точно так же, если внешняя ЭДС уменьшается, двигатель замедляется. Видно, что скорость вращения двигателя постоянного тока контролируется ЭДС источника постоянного тока, к которому подключен двигатель.Чем выше ЭДС, тем выше скорость вращения. Таким образом, относительно легко изменить скорость двигателя постоянного тока, в отличие от двигателя. Двигатель переменного тока, который по сути является двигателем с фиксированной скоростью.
Далее: Рабочие примеры Up: Магнитная индукция Предыдущая статья: Двигатель переменного тока Ричард Фицпатрик 2007-07-14
Простая схема двигателя постоянного тока | Блог Simply Smarter Circuitry
Путешествие в тысячу миль начинается с одного шага.Этот проект начнется с простой конструкции схемы двигателя постоянного тока, однако вы можете реализовать этот проект в других проектах, таких как робототехника, электромобили, ирригационные системы, умные дома и т. Д.
Тема проекта — День Земли. Мы сделаем ветряную мельницу, чтобы представить идею использования природы для сохранения энергии для улучшения окружающей среды.
Список деталей
Двигатель постоянного тока
Конденсатор 100 пФ
Переключатель ВКЛ / ВЫКЛ
Батарейный отсек
Светодиод (опция)
Картонная коробка для вторичной переработки
Собрать
Сначала вырежьте паз для двигателя постоянного тока.
Затем вырежьте прорезь для переключателя Вкл / Выкл.
Затем вырежьте область для батарейного отсека.
Пришло время соединить все вместе. Конденсатор 101 очень важен для бесперебойной работы двигателя.
Я приложу схему ниже для справки.
Наконец, приклейте все детали на место.
Я использовал запасную трубу как ось для пропеллера ветряка.
Окончательный продукт должен выглядеть так.
Я приложу видео, в котором мы используем его в одной из наших последних серий видео:
Заключение
Схема двигателя постоянного тока проста и понятна и используется для многих приложений, таких как водяные насосы, электромобили, робототехника и т.