
Управление бесколлекторным двигателем постоянного тока в комбинированном режиме
Авторы работы: И. Джанпан, Р. Чайсричароен, П. Буньянант, Тайланд. Перевод материала выполнен компанией ИНЕЛСО.
Аннотация
Считается, что бесколлекторный двигатель постоянного тока (BLDC) отличается хорошими эксплуатационными характеристиками: не требует высоких затрат на техническое обслуживание, является достаточно универсальным, обладает приемлемым крутящим моментом и скоростью вращения, а также высокой надежностью. Как правило, самый простой BLDC-двигатель состоит из ротора с постоянными магнитами и трех обмоток статора. На каждом шаге управления две из трех обмоток участвуют в создании вращающего магнитного поля, в то время как в обесточенной обмотке наводится обратная электродвижущая сила (ЭДС) и возникает паразитный электрический ток, поступающий на вход контроллера. В данной работе предложена схема управления BLDC-двигателем в комбинированном режиме, в котором генерируемый ток запасается с помощью дополнительной коммутационной схемы для дальнейшего использования. Таким образом, BLDC-двигатель может приводить в движение нагрузку одновременно с выработкой электроэнергии. Предлагаемая коммутационная схема была разработана и смоделирована в ПО PSpice. Результаты моделирования показывают, что на накопительную емкость может быть подано до 75% от входного напряжения.
Таким образом, BLDC-двигатель может приводить в движение нагрузку одновременно с выработкой электроэнергии. Предлагаемая коммутационная схема была разработана и смоделирована в ПО PSpice. Результаты моделирования показывают, что на накопительную емкость может быть подано до 75% от входного напряжения.
1. Введение
В нашем быстро меняющемся мире производство электроэнергии является крайне важным, ведь количество используемых нами электроприборов и потребляемого электричества сейчас выше, чем когда-либо. Для преобразования физической энергии в электрическую было изобретено несколько типов устройств. Основным устройством для преобразования механической энергии в электрическую, и последующего её накопления в аккумуляторных батареях, является генератор. Обратное преобразование электрической энергии в механическую осуществляется с помощью электродвигателя.
В данной статье предложен новый способ управления, позволяющий электродвигателю одновременно генерировать электрическую и механическую энергию. Здесь рассматривается бесколлекторный двигатель постоянного тока (BLDC). Поскольку BLDC-двигатель содержит вращающиеся постоянные магниты и неподвижный якорь, следовательно, подача тока на движущийся ротор больше не является проблемой. BLDC-двигатели обладают рядом преимуществ перед щеточными двигателями постоянного тока и асинхронными двигателями, включая больший крутящий момент на единицу веса и более высокий КПД, имеют пониженный уровень шума, обладают повышенной надежностью и более длительным сроком службы (отсутствует износ щеток и коллектора), а также лишены такого недостатка, как искрение коллектора.
Здесь рассматривается бесколлекторный двигатель постоянного тока (BLDC). Поскольку BLDC-двигатель содержит вращающиеся постоянные магниты и неподвижный якорь, следовательно, подача тока на движущийся ротор больше не является проблемой. BLDC-двигатели обладают рядом преимуществ перед щеточными двигателями постоянного тока и асинхронными двигателями, включая больший крутящий момент на единицу веса и более высокий КПД, имеют пониженный уровень шума, обладают повышенной надежностью и более длительным сроком службы (отсутствует износ щеток и коллектора), а также лишены такого недостатка, как искрение коллектора.
BLDC-двигателями можно управлять в 3 режимах: в режиме двигателя, в режиме генератора, и гибридном. Для управления устройством в режиме двигателя было предложено несколько методов. В [1] Ситай и соавторы выбрали в качестве схемы управления трехфазное двухполупериодное мостовое подключение звездой и проанализировали три схемы замкнутых систем управления с DSP. Ясухиро и др.
В [6, 7] было предложено несколько методов с использованием синхронного выпрямителя и преобразователя для управления устройством в режиме генератора. В [8] постоянный магнит в роторе BLDC-генератора заменен вспомогательной катушкой возбуждения.
Управление устройством в гибридном режиме является главной проблемой в этой области. Гибридный режим – это способ управления, позволяющий устройству работать попеременно двигателем и генератором. В [9] Ким и др. рассмотрели методы управления, которые минимизируют пульсации крутящего момента и максимизируют удельную мощность BLDC-двигателя/генератора постоянного тока в электромобилях и гибридных автомобилях. Кроме того, в [10] была предложена конструкция гибридной системы 20-ти кВт BLDC-двигателя на постоянных магнитах (PM). В статье описана PM BLDC-двигатель, подключенная к дизельному двигателю автомобиля объемом 1,9 л, вырабатывающая электроэнергию для зарядки высоковольтной системы накопления энергии и для приведения в действие асинхронного двигателя, присоединенного к задним колесам. Устройство также может использовать накопленную энергию для запуска двигателя или содействия основному двигателю при разгоне автомобиля. В [11] Афджей и Торкаман сравнили два новых типа конфигурации двигатель/генератор, вентильный реактивный электродвигатель (ВРД) и BLDC-двигатель без постоянных магнитов.
В [9] Ким и др. рассмотрели методы управления, которые минимизируют пульсации крутящего момента и максимизируют удельную мощность BLDC-двигателя/генератора постоянного тока в электромобилях и гибридных автомобилях. Кроме того, в [10] была предложена конструкция гибридной системы 20-ти кВт BLDC-двигателя на постоянных магнитах (PM). В статье описана PM BLDC-двигатель, подключенная к дизельному двигателю автомобиля объемом 1,9 л, вырабатывающая электроэнергию для зарядки высоковольтной системы накопления энергии и для приведения в действие асинхронного двигателя, присоединенного к задним колесам. Устройство также может использовать накопленную энергию для запуска двигателя или содействия основному двигателю при разгоне автомобиля. В [11] Афджей и Торкаман сравнили два новых типа конфигурации двигатель/генератор, вентильный реактивный электродвигатель (ВРД) и BLDC-двигатель без постоянных магнитов.
Отметим, что в обычных гибридных системах устройство поочередно переключается между режимами двигателя и генератора.
2. Управление BLDC-двигателем в комбинированном режиме
В данном разделе описаны вопросы комбинированного режима управления BLDC-двигателем. В предлагаемом режиме генерация и накопление электроэнергии в батареях происходит одновременно с его работой.
Обычно трехфазный BLDC-двигатель имеет три обмотки статора, однако их количество может быть увеличено для уменьшения пульсации крутящего момента. На рисунке 1 приведена электрическая схема статора, состоящего из трех обмоток A, B и C. Ротор BLDC-двигателя содержит четное количество постоянных магнитов. Число магнитных полюсов в роторе также влияет на размер шага и пульсацию крутящего момента двигателя.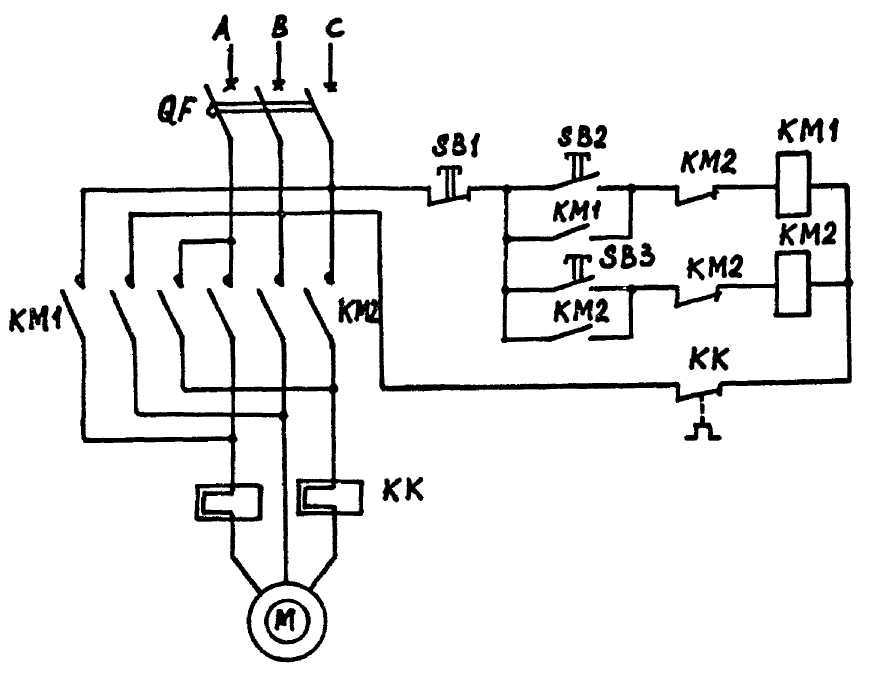 Чем больше количество полюсов, тем меньше шаг двигателя и пульсация крутящего момента. BLDC-двигателя с одной парой полюсов показан на рис. 1.
Чем больше количество полюсов, тем меньше шаг двигателя и пульсация крутящего момента. BLDC-двигателя с одной парой полюсов показан на рис. 1.
Если на обмотки двигателя правильно подано питание, возникает магнитное поле, и ротор приводится в движение. Наиболее простым методом коммутационного управления, используемым для BLDC-двигателей, является схема включения-выключения: через обмотку либо проходит ток, либо нет. В 3-фазном BLDC-двигателе питание подается одновременно только на две обмотки, а третья обмотка остается обесточенной.
В предложенном комбинированном режиме управления устройством неактивная обмотка используется для генерации электроэнергии во время работы двигателя.
Рис. 1. Упрощенные схемы BLDC -двигателей [13]
Рис. 2. Временная диаграмма работы BLDC-двигателя
Для создания вращающего магнитного поля, толкающего ротор, производится одновременная подача энергии на 2 фазы BLDC-двигателя. Статическое выравнивание, показанное на рис. 2, может быть задано за счет прохождения электрического тока от клеммы A к клемме B (путь тока отмечен на схеме рис.1 цифрой 1). Ротор можно заставить повернуться по часовой стрелке на 60 градусов от положения A-B, обеспечив протекание тока от клеммы C к B (этот путь тока отмечен на схеме цифрой 2). Если непрерывно приводить двигатель в действие таким образом, то он может совершить полный оборот на 360° при достижении конечного шага №6. Как видно из временной диаграммы, приведенной на рис. 2, электрическая энергия может быть получена на выходе, когда постоянное магнитное поле ротора движется сквозь обесточенную обмотку. При этом каждая обмотка может генерировать электроэнергию дважды за один оборот.
Статическое выравнивание, показанное на рис. 2, может быть задано за счет прохождения электрического тока от клеммы A к клемме B (путь тока отмечен на схеме рис.1 цифрой 1). Ротор можно заставить повернуться по часовой стрелке на 60 градусов от положения A-B, обеспечив протекание тока от клеммы C к B (этот путь тока отмечен на схеме цифрой 2). Если непрерывно приводить двигатель в действие таким образом, то он может совершить полный оборот на 360° при достижении конечного шага №6. Как видно из временной диаграммы, приведенной на рис. 2, электрическая энергия может быть получена на выходе, когда постоянное магнитное поле ротора движется сквозь обесточенную обмотку. При этом каждая обмотка может генерировать электроэнергию дважды за один оборот.
Рис. 3. Структурная схема аппаратной части системы
На рис. 3 показана структурная схема предлагаемой системы управления BLDC-двигателем в комбинированном режиме. Здесь в качестве входных данных для микроконтроллера PIC16F877 служат команда скорости и сигнал от датчиков Холла.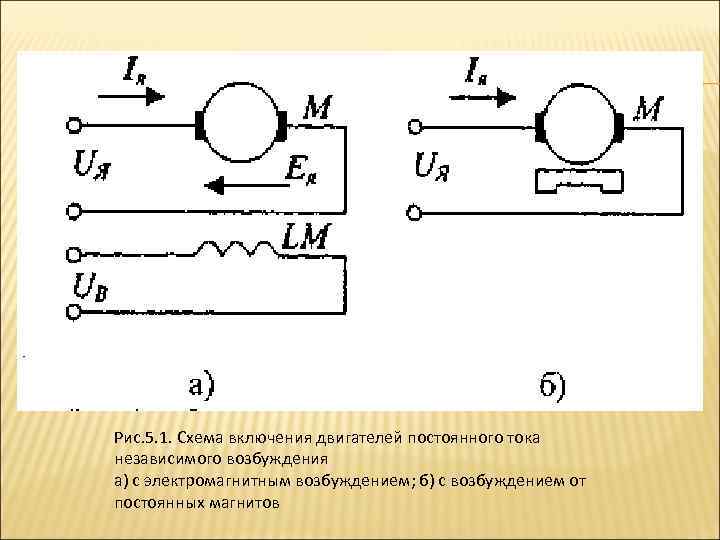
Рис. 4. Схема драйвера комбинированного режима
Для управления ключами MOSFET рассмотрена схема двигателя, приведенная на рис. 1 и временная диаграмма, показанная на рис. 2. В таблице 1 по шагам расписано управляющее воздействие, подаваемое на MOSFET-транзисторы в соответствии с сигналом, поступающим с датчиков Холла.
2. В таблице 1 по шагам расписано управляющее воздействие, подаваемое на MOSFET-транзисторы в соответствии с сигналом, поступающим с датчиков Холла.
Таблица 1. Временная диаграмма для комбинированного режима управления, состоящая из 6 шагов
3. Моделирование системы
На рис. 5 приведена предлагаемая нами схема управления, смоделированная в ПО PSpice – программе, предназначенной для симуляции аналоговой и цифровой логики. В качестве модели обмотки статора трехфазного BLDC-двигателя на симуляции был использован трансформатор. Моделируемая схема управляется в соответствии с 6 ступенчатой временной диаграммой, приведенной на рис. 2.
Рис. 5. Схема предлагаемой системы комбинированного режима управления BLDC-двигателем, смоделированная в PSpice.
4. Результат моделирования
В этом разделе представлены некоторые результаты моделирования схемы комбинированного режима управления BLDC-двигателем/генератором для случая, когда BLDC-двигатель работает от постоянного входного напряжения 12В при 150 об/мин.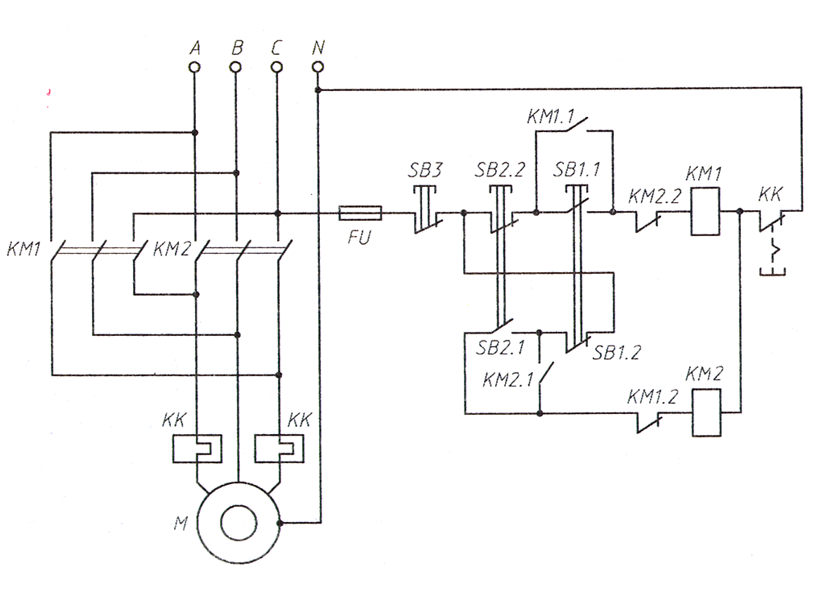
Рис. 6. 3-фазный выходной сигнал для комбинированного режима управления (моделирование)
На рисунке 6 приведены графики выходного напряжения, получаемого от каждой неактивной обмотки, во время работы BLDC-двигателя в комбинированном режиме. На рис. 7 и 8 приведены графики выходного напряжения, полученного на нагрузке 100 кОм и без нагрузки соответственно.
Здесь мы отметили, что выходные напряжения меняется в зависимости от величины нагрузки. Это должно наблюдаться и в реальном эксперименте с использованием зарядной цепи.
Рис. 7. Выходное напряжение при работе двигателя в комбинированном режиме на нагрузке 100 кОм
Рис. 8. Выходное электрическое напряжение при работе двигателя в комбинированном режиме на холостом ходу
5. Заключение
В статье предложен комбинированный режим управления BLDC-двигателем, в котором электроэнергия может быть получена во время работы двигателя. Для выработки электроэнергии, которая может быть подана обратно в систему или запасена в аккумуляторе для других целей, используется преимущества обесточенной обмотки BLDC-двигателя.
Для выработки электроэнергии, которая может быть подана обратно в систему или запасена в аккумуляторе для других целей, используется преимущества обесточенной обмотки BLDC-двигателя.
Было проведено моделирование в ПО PSpice. Результаты показывают, что, используя данный режим работы, мы можем получить выходные напряжения, составляющие около 75% от входного (9В от напряжения входа 12В), в отсутствие нагрузки. Реальная реализация предложенной системы будет дополнительно изучена.
Авторы статьи: И. Джанпана, Р. Чайсричароенб, П. Буньянанта
а Школа информационных технологий, Университет Маэ Фа Луанг, Чианграй, 57100 Таиланд
б Кафедра вычислительной техники, инженерный факультет Кампхаенг саен, Кампус Университета Касетсарт Кампхаенг саен, Накхонпатом, 73140 Таиланд
Список литературы
[1] Wang Xitai, Zhang Xuexiu, Li Lifeng, Liu Bingshan.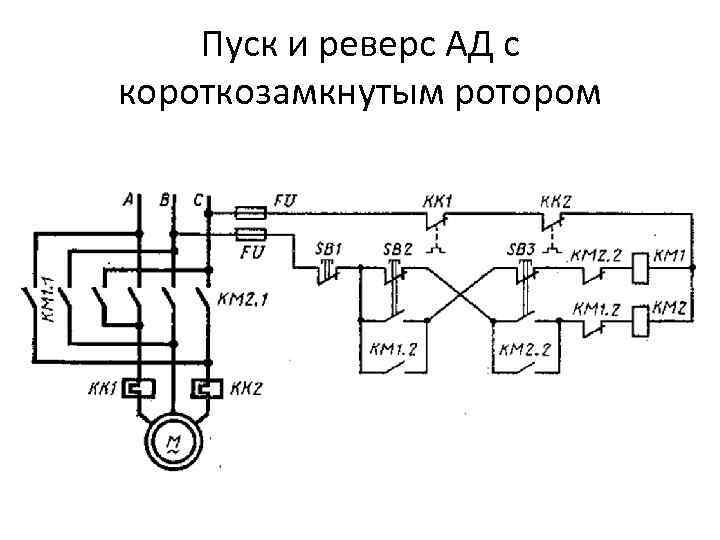 Brushless DC Motor Speed Control System of the Walking Aids
Brushless DC Motor Speed Control System of the Walking Aids
Machine. IEEE/ICINIS; 2009, p. 589-592
[2] Komatsu Yasuhiro, Tur-Amgalan Amarsanaa, Yoshihiko Araki, Syed Abdul Kadir Zawawi, Takamura Keita. Design of the
Unidirectional Current Type Coreless DC Brushless Motor for Electrical Vehicle with Low Cost and High Efficiency.
IEEE/SPEEDAM; 2010, p. 1036-1039
[3] Sun Chunxiang, Mo Bo. Design of Control System of Brushless DC Motor Based on DSP. IEEE/ICICTA;2010, p. 11-14
[4] Chengang Zhao and Yaochun Wu . The Design of Brushless DC Motor Controller. IEEE; 2010, p. 729-731
[5] Jung-Sheng Wen, Chi-Hsu Wang, Ying-De Chang, Ching-Cheng Teng. Intelligent Control of High-Speed Sensorless
Brushless DC Motor for Intelligent Automobiles. IEEE/SMC; 2008, p. 3394-3398
[6] Orner c. Onar, Yusuf Gurkaynak, and Alireza Khaligh.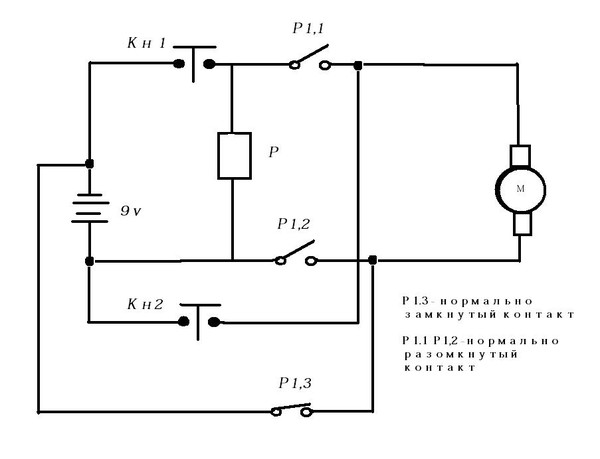 A Brushless DC Generator & Synchronous Rectifier for Isolated
A Brushless DC Generator & Synchronous Rectifier for Isolated
Telecommunication Stations. IEEE/INTLEC; 2009, p. 1-6
[7] G. Gatto – I. Marongiu – A. Perfetto (*) – A. Serpi . Brushless DC Generator controlled by Constrained Predictive
Algorithm. IEEE; 2010, p. 1224-1229
[8] H. Moradi, M. Seyed Yazdi and E. Afjei. Brushless dc Generator without Permanent Magnet. IEEE/SPEEDAM; 2010, p.
278-281
[9] Taehyung Kim, Hyung-Woo Lee, Leila Parsa, Member, and Mehrdad Ehsani4. Optimal Power and Torque Control of a
Brushless DC (BLDC) Motor/Generator Drive in Electric and Hybrid Electric Vehicles. IEEE; 2006, p. 1276-1281
[10] S. M. N. Hasan, I. Husain, R. J. Veillette and J. E. Carletta. A PM Brushless DC Starter/Generator System for a Series#Parallel 2×2 Hybrid Electric Vehicle. IEEE; 2007, p. 1686-1689
[11] E.Afjei, H. Torkaman . Comparison of Two Types of Hybrid Motor/Generator. IEEE/SPEEDAM; 2010, p. 982-986#
Torkaman . Comparison of Two Types of Hybrid Motor/Generator. IEEE/SPEEDAM; 2010, p. 982-986#
[12] http://www.electronics-tutorials.ws/electromagnetism/electromagnetic-induction.html
Схема управления пуском и динамическим торможением асинхронных двигателей
Содержание
Принципиальная электрическая схема агрегата АД-20М (см. рис.1).
В схеме синхронный генератор со статической системой возбуждения показан в свернутом виде.
Она включает в себя бесконтактные и релейно-контактные элементы. Вращение вала электродвигателя передается через фрикционную муфту на червяк, червячное колесо редуктора, ходовой винт, при этом ходовая гайка движется поступательно. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б.
По импульсу от зарядного генератора замыкается цепь реле удавшегося запуска 1РИ. Управление двигателями осуществляется реверсивным магнитным пускателем.
Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени Пуск двигателя осуществляется нажатием кнопки SВ1 рис. Предполагается, что при включении рычажок РБ перемещается вправо, а при отключении — влево. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4 1—2 , нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2.
Реостатный пуск асинхронного двигателя с кз ротором.
Его контакт замкнется в цепи контактора ВК3. Если не работает охлаждающий или рассольный насос, то пуск компрессора невозможен контакт Р или Р1 разомкнут в цепи контактора пуска компрессора ВК3.
Ее роль выполняет массивная бочка ротора. Схемы электрооборудования дизелей В схемах электрооборудования дизелей отсутствует система зажигания, поэтому схема получается несколько проще. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Проекты по теме:
В случае задержки в выставлении счета и коммерческого предложения, а также при возникновении претензий к работе отдела продаж, обращаться к старшему менеджеру. В магнитную станцию входит вся электроаппаратура схемы, кроме резисторов R1—R4. Туда же поступает топливо, прошедшее в полость пружины форсунки через зазор между иглой и распылителем.
Фотографии готовых изделий Главный офис и склад компании г. Схема управления АД с кз предусматривает несколько защит: от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU; от перегрузок — посредством теплореле КК при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка ; нулевая защита — посредством магнитного пускателя КМ при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается.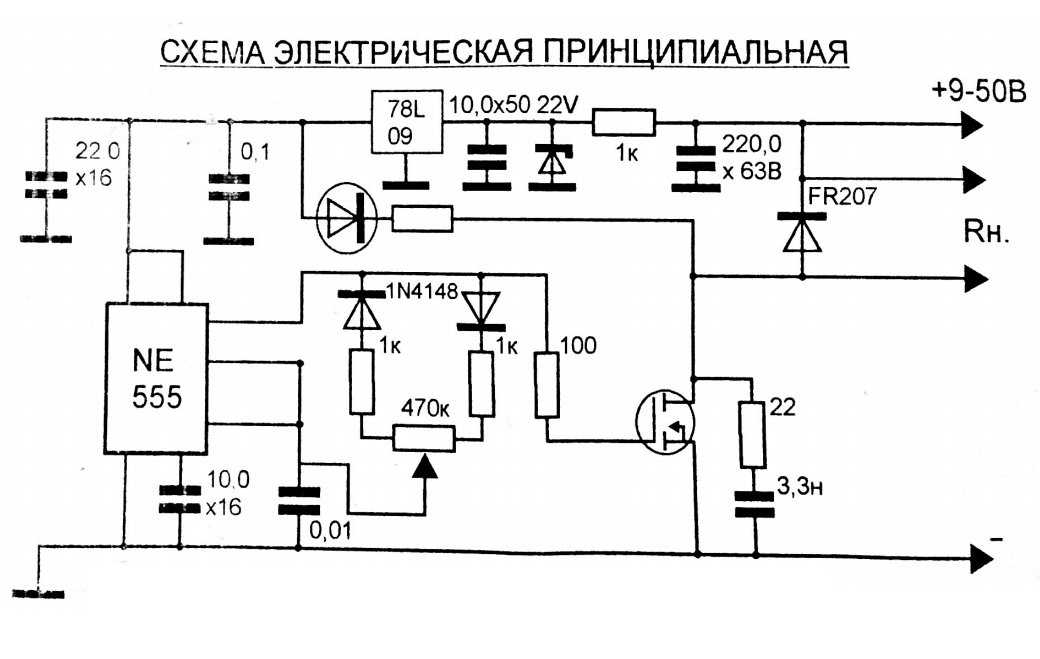 Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Подготовка к работе Заправка топливом Проверить наличие топлива в топливном баке. Сочи — Тел.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Подготовка к работе Заправка топливом Проверить наличие топлива в топливном баке. Сочи — Тел.
Схема управления двигателем с двух и трех мест
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n.
В этих условиях ЭДС машины Еа = сеФn превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n
13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т. е. ток в обмотке возбуждения.
е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:
При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель).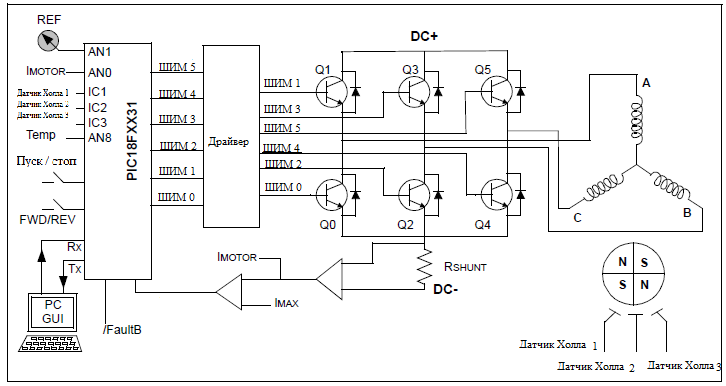 Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Схемы подключения трехфазных электродвигателей
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности схемы соединения обмоток электродвигателя в соответствии с его паспортными данными
Условные обозначения на схемах
Магнитный пускатель (далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя.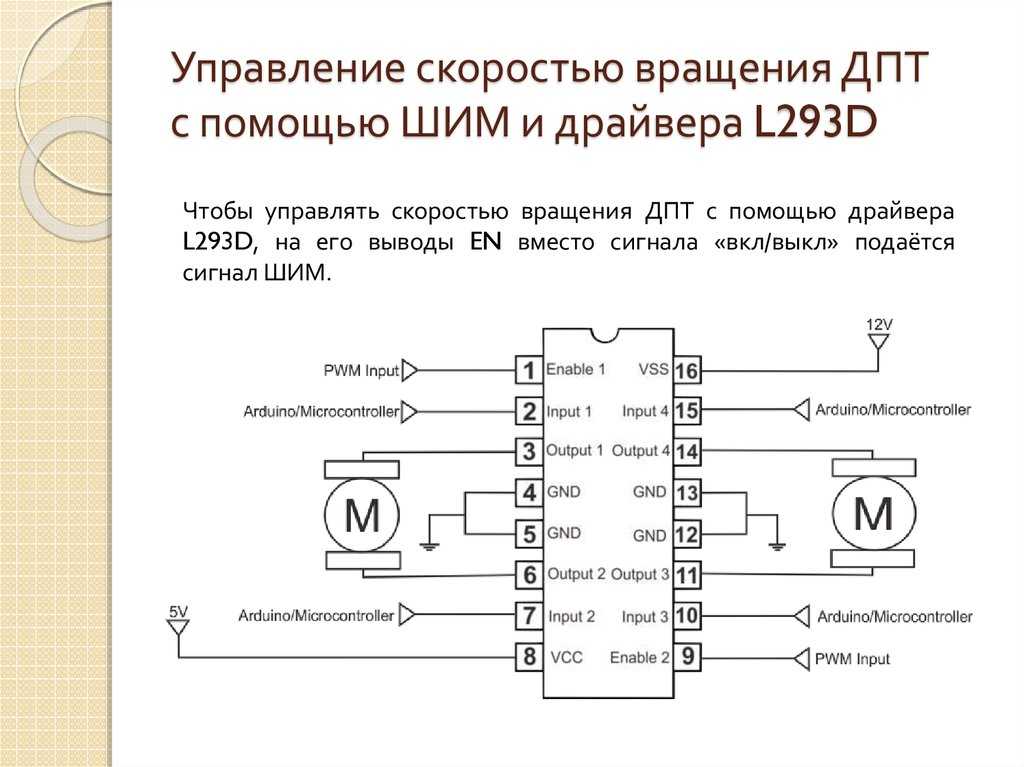 Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
1.Устройство системы пуска двигателя
В обычной системе пуска двигателя можно выделить три основных механизма
- Электромотор – создает вращающий момент.
- Система привода – передает вращение на двигатель.
- Электромагнитный включатель – приводит ведущую шестерню стартера в зацепление с ободом маховика, а также дает электрический ток в электромотор.
Рассмотрим электромотор системы пуска, создающий вращающий момент. Корпус электромотора выполнен из стали и имеет внешний вид цилиндра. Внутри корпуса имеются обмотки возбуждения, намотанные вокруг сердечников, прикрепленных к корпусу. Эти обмотки выполнены из толстой токопроводящей проволоки, способной выдержать сильный электрический ток.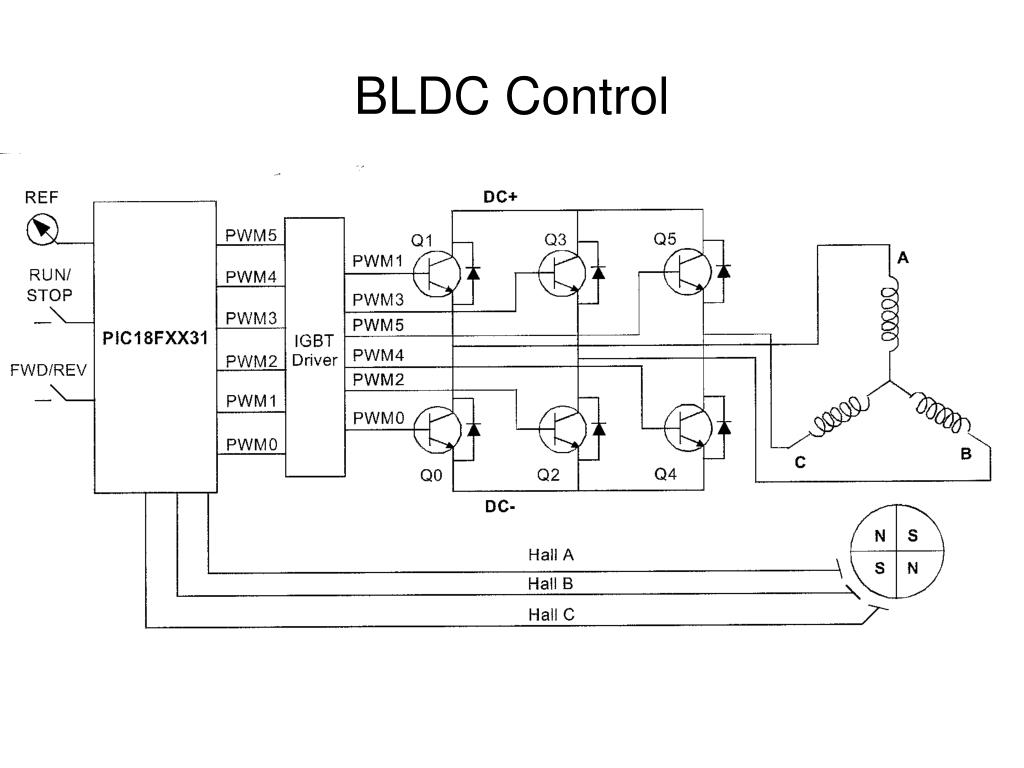 Обмотки генерируют электромагнитное поле, способное вращать якорь стартера. Одним из элементов якоря является сердечник, с канавками вдоль которого располагаются витки обмоток якоря. Оба конца каждой обмотки подключены к коллектору. Вращающие моменты, создаваемые каждой из обмоток, складываются, чтобы можно было вращать якорь, точнее вал якоря. Если посмотреть на стартер со стороны коллектора, то на якоре видно щеткодержатель.
Обмотки генерируют электромагнитное поле, способное вращать якорь стартера. Одним из элементов якоря является сердечник, с канавками вдоль которого располагаются витки обмоток якоря. Оба конца каждой обмотки подключены к коллектору. Вращающие моменты, создаваемые каждой из обмоток, складываются, чтобы можно было вращать якорь, точнее вал якоря. Если посмотреть на стартер со стороны коллектора, то на якоре видно щеткодержатель.
| Якорь стартера состоит из вала, сердечника с пазами на которые устанавливается обмотка стартера. Для подробного изучения предлагаю воспользоваться схемой устройства якоря стартера. |
| Втягивающее реле служит для подачи тока на мотор стартера и вводит бендикс в зацепление с маховиком для запуска двигателя. Устройство втягивающего реле, неисправности тягового реле. Как определить неисправности втягивающего реле? |
Рассмотрим, как устроен щеткодержатель в щеткодержателе объединены 4 щетки, прижимаемые к коллектору.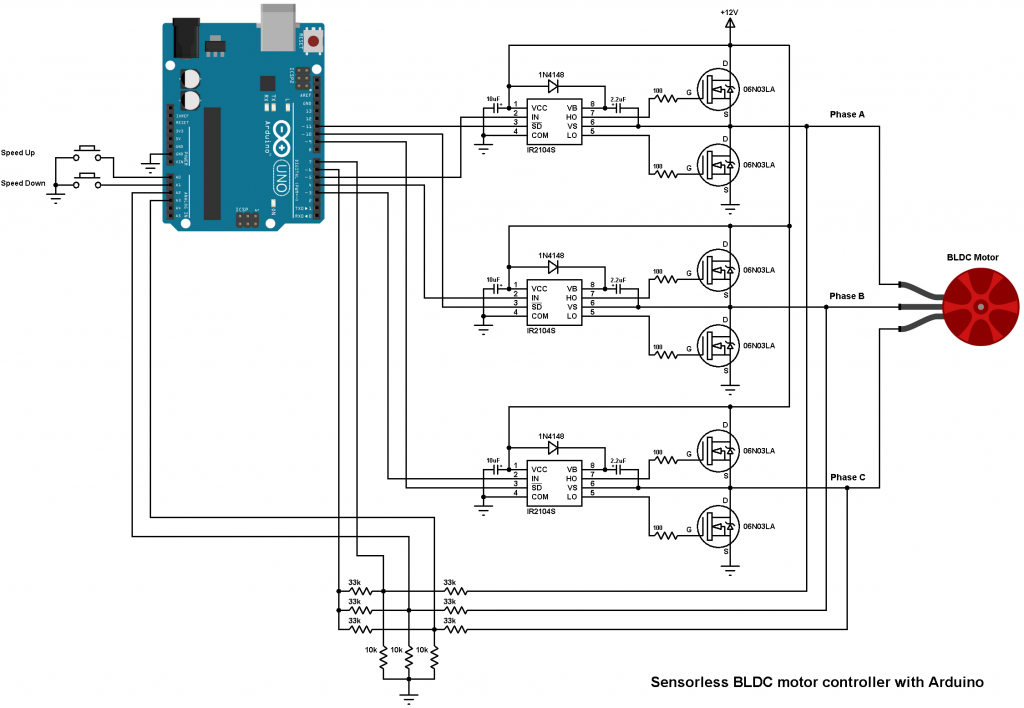 Две из четырех щеток находятся в изолированных оправках и соединены с обмотками якоря и далее через коллектор с обмотками возбуждения. Те и другие заземлены на корпус.
Две из четырех щеток находятся в изолированных оправках и соединены с обмотками якоря и далее через коллектор с обмотками возбуждения. Те и другие заземлены на корпус.
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
Цепь ШИМ управления скоростью двигателя постоянного тока
Фарва Навази
3370 просмотровВведение
Двигатели постоянного тока имеют широкий спектр применения в электронных устройствах. Если вы изучаете электрику или электронику, то вы, должно быть, изучили ее внутреннюю структуру и работали со своими учителями. Если вы человек, который любит делать проекты, то вы, должно быть, использовали его в различных проектах. Или, если вы человек, который просто исследует промышленное и другое простое оборудование, то вы также должны были видеть его в разных местах. Потому что, по-видимому, двигатели постоянного тока есть во всех остальных приложениях. Итак, важно обсудить управление скоростью двигателя постоянного тока.
Потому что, по-видимому, двигатели постоянного тока есть во всех остальных приложениях. Итак, важно обсудить управление скоростью двигателя постоянного тока.
Разным приложениям требуются разные скорости, но многим приложениям нужны разные уровни скорости. Например, роботизированные автомобили могут не хотеть, чтобы скорость назад была такой же, как скорость вперед. Точно так же некоторые промышленные устройства работают на разных уровнях скорости. Итак, в этом уроке мы собираемся создать и понять работу «ШИМ-схемы управления скоростью двигателя постоянного тока»
Говоря о ШИМ, широтно-импульсная модуляция — это сигналы прямоугольной формы, которые переключаются между состояниями ВКЛ и ВЫКЛ. Широтно-импульсная модуляция — это прежде всего метод, который используется для уменьшения средней мощности электрического сигнала. Следовательно, эта схема может управлять яркостью светодиодов. Он также имеет различные другие приложения в различных электронных схемах. Например, он может контролировать скорость двигателя. Для генерации импульсов используется термин, называемый рабочим циклом. Отношение рабочего цикла времени, когда сигнал находится на высоком уровне, к общему времени, которое требуется для завершения одного цикла. Выражается в процентах
Для генерации импульсов используется термин, называемый рабочим циклом. Отношение рабочего цикла времени, когда сигнал находится на высоком уровне, к общему времени, которое требуется для завершения одного цикла. Выражается в процентах
Особенности драйвера двигателя L293D
- Он имеет широкий диапазон напряжения питания от 4,5 В до 36 В
- Кроме того, он включает в себя отдельный источник питания входной логики.
- Драйвер также имеет внутреннюю защиту от электростатических разрядов.
- Обеспечивает вход с высокой помехоустойчивостью.
- Выходной ток: 600 мА
- Пиковый выходной ток: 1,2 А
Требуемое оборудование
| Sr | Компоненты | Кол-во0043 |
|---|---|---|
| 1 | Timer IC (NE555) | 1 |
| 2 | IC (L293D) | 1 |
| 3 | DC Motor (1000 RPM) | 1 |
| 4 | Potentiometer (100KΩ) | 1 |
| 5 | Diode (1N4007) | 2 |
| 6 | Switch | 1 |
| 7 | Bread Board | 1 |
| 8 | Electrolysis Capacitor (0.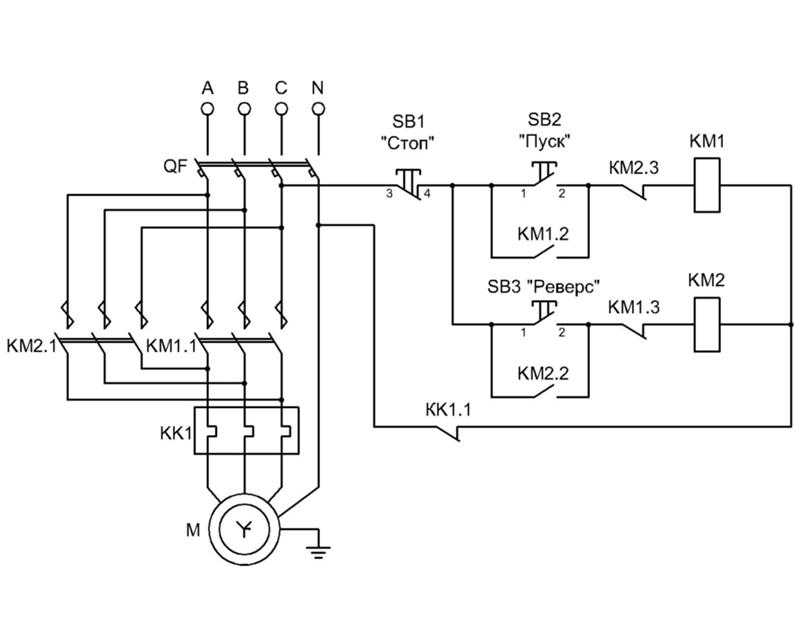 1μF) 1μF) | 1 |
| 9 | Ceramic Capacitor (1μF) | 1 |
| 10 | Resistor (1KΩ,100Ω) | 1, 2 |
| 11 | Connecting wires | – |
| 12 | 9v Battery | 1 |
| 13 | 2-Pin Connector | 2 |
Circuit Diagram
Объяснение работы
В этом таймере схемы ШИМ управления скоростью двигателя постоянного тока IC 555 работает как генератор прямоугольных импульсов в зависимости от значения потенциометра. Ширина выходного импульса или рабочий цикл могут быть изменены, и выходной сигнал от IC 555 немедленно передается драйверу двигателя H-Bridge IC (H-мост — это установка, которая используется для привода или запуска двигателей как по часовой стрелке, так и против часовой стрелки. , Следовательно, IC может запускать два двигателя в любом направлении одновременно) с помощью тумблера. Используя тумблер, вы можете изменить вход L29.3D. Мы подключили двигатель постоянного тока между выводами 1 и 2 микросхемы драйвера двигателя.
, Следовательно, IC может запускать два двигателя в любом направлении одновременно) с помощью тумблера. Используя тумблер, вы можете изменить вход L29.3D. Мы подключили двигатель постоянного тока между выводами 1 и 2 микросхемы драйвера двигателя.
Применение и использование
Схема может использоваться для регулировки скорости двигателя постоянного тока Из:
- Конвейерные ленты.
- Вентиляторы постоянного тока.
- Роботизированные автомобили.
- В медицинских целях.
- Промышленное применение.
- Цепи автоматизации.
- В робототехнике и т. д.
Похожие сообщения:
Контроллер двигателя постоянного тока— Информация по электронике от PenguinTutor
Направление двигателя постоянного тока определяется направлением тока через двигатель, поэтому, меняя положительное и отрицательное питание, мы можем заставить двигатели изменить направление.
Н-мостовая схема
Конфигурация Н-моста является распространенным способом изменения направления подачи питания. H-мост назван так, потому что он имеет форму буквы H и использует две пары переключателей, которые необходимо переключать вместе. Это проще всего объяснить, используя видео ниже.
H-мост назван так, потому что он имеет форму буквы H и использует две пары переключателей, которые необходимо переключать вместе. Это проще всего объяснить, используя видео ниже.
Пары переключателей расположены по диагонали друг к другу. Каждая пара переключателей должна быть замкнута одновременно. Таким образом, на диаграммах ниже S1 и S4 образуют одну пару, а S2 и S3 — другую пару.
Это Н-мост в выключенном состоянии. Все четыре переключателя выключены, и на двигатель не подается питание.
Когда S1 и S4 замкнуты, положительный источник питания идет слева от двигателя, а отрицательный — справа. После этого двигатель будет работать в одном направлении.
Для изменения направления необходимо разомкнуть переключатели S1 и S4, а затем закрыть S2 и S3. Положительное питание теперь подается справа от двигателя, а отрицательное — слева, поэтому двигатель теперь будет вращаться в противоположном направлении.
Важно, чтобы S1 и S3 никогда не закрывались одновременно, и то же самое с S2 и S4. Их совместное включение может привести к короткому замыканию в источнике питания.
ИС H-моста — SN754410 Quad Half-H драйвер IC
Схема Н-моста может быть выполнена с дискретными транзисторами/полевыми транзисторами, интегральной схемой или даже реле (хотя реле затруднило бы реализацию управления скоростью). Для небольших двигателей обычно проще всего использовать интегральную схему (чип) H-моста.
Интегральная схема SN754410 представляет собой счетверенный драйвер Half-H, который содержит четыре модуля. Объединение двух таких модулей обеспечивает единую схему Н-моста. Таким образом, мы можем использовать одну микросхему для управления двумя двигателями.
Схема PIN-кода показана ниже:
На логической схеме показано, как четыре модуля полумоста могут быть сконфигурированы как пара контроллеров H-моста.
Чтобы убедиться, что ИС подходит, мы должны обратиться к техническому описанию, доступному у производителя (в данном случае Texas Instruments). Согласно техническому описанию микросхема может использоваться для переключения до 1 А для источников питания от 4,5 В до 36 В и включает в себя отдельный источник питания для входа и выхода. Все входы совместимы с логикой TTL и CMOS, которая будет работать как с GPIO от Raspberry Pi, так и с Arduino. Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Согласно техническому описанию микросхема может использоваться для переключения до 1 А для источников питания от 4,5 В до 36 В и включает в себя отдельный источник питания для входа и выхода. Все входы совместимы с логикой TTL и CMOS, которая будет работать как с GPIO от Raspberry Pi, так и с Arduino. Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Существует два разных способа использования входных сигналов для контроллера H-bridge.
Один из способов — иметь один выход для направления вращения двигателя, который инвертируется между двумя входами, а затем использовать контакт включения для включения и выключения двигателя. Так, например, если бы у вас был вход высокого направления, который перешел бы на вход 1A и инвертировал бы низкий уровень на входе 2A и наоборот, чтобы изменить направление. Для этого потребуются только два входа для SN754410, но потребуется добавить в схему инвертор. Или это можно реализовать, имея три выхода от GPIO, один из которых инвертирован.
Другой вариант, который мы будем использовать здесь, состоит в том, чтобы постоянно активировать контакт EN, подключив его к высокому уровню, а затем используя два входа для включения и выключения двигателя, а также для определения направления. Это достигается установкой обоих 1A и 2A на низкий уровень, что является выключенным состоянием, а затем переключением одного из них на высокий уровень, чтобы включить двигатель и установить направление.
Принципиальная схема для использования с Raspberry Pi GPIO
На приведенной ниже схеме показано, как можно использовать GPIO для управления контроллером мотора SN754410 H-bridge.
Его можно построить на макетной плате с помощью устройства Raspberry Pi GPIO, как показано ниже.
Он также доступен на печатной плате на основе печатной платы контроллера двигателя Ryanteck.
С диодами или без диодов
Двигатели являются электромагнитными устройствами. Это означает, что они используют электронный ток для создания магнитного поля, которое вызывает действие, в данном случае вращение двигателя. Когда питание отключается, магнитное поле разрушается, или, если двигатель продолжает вращаться, он может действовать как генератор. Когда это происходит, может возникнуть скачок напряжения, вызванный обратной ЭДС (электродвижущей силой), которая может повредить чувствительные электронные компоненты. Обычно диод подключается к магнитной нагрузке в обратном направлении, чтобы предотвратить повреждение электронной схемы обратной ЭДС. Они имеют разные названия, включая обратные диоды, диоды свободного хода, ограничительные диоды или фиксирующие диоды.
Когда питание отключается, магнитное поле разрушается, или, если двигатель продолжает вращаться, он может действовать как генератор. Когда это происходит, может возникнуть скачок напряжения, вызванный обратной ЭДС (электродвижущей силой), которая может повредить чувствительные электронные компоненты. Обычно диод подключается к магнитной нагрузке в обратном направлении, чтобы предотвратить повреждение электронной схемы обратной ЭДС. Они имеют разные названия, включая обратные диоды, диоды свободного хода, ограничительные диоды или фиксирующие диоды.
В техническом описании микросхемы SN754410 показана внутренняя схема на основе приведенной ниже схемы. На нем показаны два диода, подключенных в обратном порядке к выходу транзистора, что поможет рассеять скачок напряжения. Однако в том же листе данных также показан пример принципиальной схемы, где подключены внешние диоды.
Добавление внешних диодов будет стоить лишь небольшую сумму (обычно несколько пенсов за диод), однако добавление их на макетную плату сделает схему более сложной и трудной для понимания.