
Основы метрологии и электрические измерения
Основы метрологии и электрические измерения
ОглавлениеПредисловиеВведение Раздел А. ОБЩИЕ СВЕДЕНИЯ ОБ ИЗМЕРИТЕЛЬНОЙ ТЕХНИКЕ Глава первая. ОСНОВНЫЕ ПОНЯТИЯ ИЗМЕРИТЕЛЬНОЙ ТЕХНИКИ И КЛАССИФИКАЦИЯ ИЗМЕРЕНИЙ 1-2. ВИДЫ И МЕТОДЫ ИЗМЕРЕНИЙ Глава вторая. ПОГРЕШНОСТИ ИЗМЕРЕНИЙ 2-1. ОСНОВНЫЕ ПОНЯТИЯ И ВИДЫ ПОГРЕШНОСТЕЙ 2-2. ВЕРОЯТНОСТНЫЙ ПОДХОД К ОПИСАНИЮ ПОГРЕШНОСТЕЙ 2-3. ВЕРОЯТНОСТНЫЕ ОЦЕНКИ ПОГРЕШНОСТЕЙ Глава третья. ОСНОВЫ МЕТРОЛОГИЧЕСКОГО ОБЕСПЕЧЕНИЯ 3-2. ЭТАЛОНЫ ЕДИНИЦ ФИЗИЧЕСКИХ ВЕЛИЧИН 3-3. ГОСУДАРСТВЕННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ ЕДИНСТВА ИЗМЕРЕНИЙ Раздел Б. ЭЛЕКТРИЧЕСКИЕ СРЕДСТВА ИЗМЕРЕНИЙ 4-2. ГОСУДАРСТВЕННАЯ СИСТЕМА ПРИБОРОВ 4-3. ХАРАКТЕРИСТИКИ СРЕДСТВ ИЗМЕРЕНИЙ 4-4. СИГНАЛЫ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ Математические модели сигналов. Дискретизация сигналов. 4-5. СТРУКТУРНЫЕ СХЕМЫ И СВОЙСТВА СРЕДСТВ ИЗМЕРЕНИЙ В СТАТИЧЕСКОМ РЕЖИМЕ Средства измерений прямого преобразования.  Средства измерений уравновешивающего преобразования. 4-6. СРЕДСТВА ИЗМЕРЕНИЙ В ДИНАМИЧЕСКОМ РЕЖИМЕ Переходные и импульсные переходные характеристики. Частотные характеристики. Передаточные функции. Глава пятая. МЕРЫ, ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРИБОРЫ 5-3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРИБОРЫ МАГНИТОЭЛЕКТРИЧЕСКИЕ ПРИБОРЫ Амперметры и вольтметры. Омметры. Гальванометры. Баллистические гальванометры. Кулонметры. Вибрационные гальванометры. ЭЛЕКТРОДИНАМИЧЕСКИЕ И ФЕРРОДИНАМИЧЕСКИЕ ПРИБОРЫ ЭЛЕКТРОМАГНИТНЫЕ ПРИБОРЫ ЭЛЕКТРОСТАТИЧЕСКИЕ ПРИБОРЫ ИНДУКЦИОННЫЕ ПРИБОРЫ 5-4. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРИБОРЫ С ПРЕОБРАЗОВАТЕЛЯМИ Глава шестая. ЭЛЕКТРОННЫЕ АНАЛОГОВЫЕ ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ 6-2. ЭЛЕКТРОННЫЕ ВОЛЬТМЕТРЫ 6-3. ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЙ ЧАСТОТЫ И ФАЗЫ 6-4. ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЙ МОЩНОСТИ И ЭНЕРГИИ 6-6.  ЭЛЕКТРОННО ЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ ЭЛЕКТРОННО ЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ6-7. АНАЛИЗАТОРЫ СПЕКТРА, ИЗМЕРИТЕЛИ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ Глава седьмая. МОСТЫ И КОМПЕНСАТОРЫ 7-2. ТЕОРИЯ МОСТОВЫХ СХЕМ 7-3. МОСТЫ ДЛЯ ИЗМЕРЕНИЙ СОПРОТИВЛЕНИЯ НА ПОСТОЯННОМ ТОКЕ 7-4. МОСТЫ ПЕРЕМЕННОГО ТОКА ДЛЯ ИЗМЕРЕНИЙ ЕМКОСТИ, УГЛА ПОТЕРЬ, ИНДУКТИВНОСТИ И ДОБРОТНОСТИ 7-5. КОМПЕНСАТОРЫ ПОСТОЯННОГО ТОКА 7-6. КОМПЕНСАТОРЫ ПЕРЕМЕННОГО ТОКА 7-7. АВТОМАТИЧЕСКИЕ МОСТЫ И КОМПЕНСАТОРЫ Глава восьмая. ЦИФРОВЫЕ ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ 8-3. УЗЛЫ ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ 8-4. ЦИФРОВЫЕ ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА ПОСЛЕДОВАТЕЛЬНОГО СЧЕТА ЦИУ С НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАНИЕМ В КОД ЧАСТОТЫ ЦИУ С НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАНИЕМ В КОД НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА ЦИУ С НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАНИЕМ В КОД ПЕРЕМЕЩЕНИЯ 8-5. ЦИФРОВЫЕ ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА ПОСЛЕДОВАТЕЛЬНОГО ПРИБЛИЖЕНИЯ 8-6. ЦИФРОВЫЕ ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА СЧИТЫВАНИЯ 8-7.  ХАРАКТЕРИСТИКА СОВРЕМЕННЫХ ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ И ПЕРСПЕКТИВЫ ИХ РАЗВИТИЯ ХАРАКТЕРИСТИКА СОВРЕМЕННЫХ ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ И ПЕРСПЕКТИВЫ ИХ РАЗВИТИЯ9-2. САМОПИШУЩИЕ ПРИБОРЫ ПРЯМОГО ПРЕОБРАЗОВАНИЯ 9-3. СВЕТОЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ 9-4. МАГНИТОГРАФЫ, ГРАФОПОСТРОИТЕЛИ, ЭЛЕКТРОННЫЕ ОСЦИЛЛОГРАФЫ, ЦИФРОПЕЧАТАЮЩИЕ УСТРОЙСТВА Глава десятая. ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЙ МАГНИТНЫХ ВЕЛИЧИН 10-2. МАГНИТОИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЙ МАГНИТНОГО ПОТОКА ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЙ МАГНИТНОЙ ИНДУКЦИИ И НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ 10-3. АППАРАТУРА ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК И ПАРАМЕТРОВ МАГНИТНЫХ МАТЕРИАЛОВ Глава одиннадцатая. ПРИБОРЫ И ПРЕОБРАЗОВАТЕЛИ ДЛЯ ИЗМЕРЕНИЙ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН 11-2. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ГЕНЕРАТОРНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ 11-4. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ И МЕХАНИЧЕСКИХ ВЕЛИЧИН 11-5. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЙ КОНЦЕНТРАЦИИ ЖИДКОЙ И ГАЗООБРАЗНОЙ СРЕДЫ Глава двенадцатая.  ИЗМЕРИТЕЛЬНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ ИЗМЕРИТЕЛЬНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ12-2. ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ 12-3. ТЕЛЕИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ 12-4. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ 12-5. ИЗМЕРИТЕЛЬНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ НА ОСНОВЕ АГРЕГАТНЫХ КОМПЛЕКСОВ ГОСУДАРСТВЕННОЙ СИСТЕМЫ ПРИБОРОВ И СРЕДСТВ АВТОМАТИЗАЦИИ Глава тринадцатая. ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЕ СРЕДСТВА 13-3. ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЕ КОМПЛЕКСЫ Раздел В. ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН Глава четырнадцатая. ПОДГОТОВКА ИЗМЕРИТЕЛЬНОГО ЭКСПЕРИМЕНТА И ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ 14-2. ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ 14-3. СУММИРОВАНИЕ ПОГРЕШНОСТЕЙ Глава пятнадцатая. ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ, МАГНИТНЫХ И НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН 15-2. ИЗМЕРЕНИЯ МОЩНОСТИ, ЭНЕРГИИ И КОЛИЧЕСТВА ЭЛЕКТРИЧЕСТВА 15-3. ИЗМЕРЕНИЯ ЧАСТОТЫ, ФАЗЫ, ВРЕМЕННЫХ ИНТЕРВАЛОВ, АНАЛИЗ СПЕКТРА ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ 15-4. ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЦЕПЕЙ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА 15-5.  МАГНИТНЫЕ МАТЕРИАЛЫ И ИХ ХАРАКТЕРИСТИКИ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК И ПАРАМЕТРОВ МАГНИТНЫХ МАТЕРИАЛОВ 15-6. ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН ИЗМЕРЕНИЯ ДАВЛЕНИЙ, ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ И РАССТОЯНИЙ Глава шестнадцатая. ИЗМЕРЕНИЯ ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ 16-2. ИЗМЕРЕНИЯ МАТЕМАТИЧЕСКОГО ОЖИДАНИЯ И ДИСПЕРСИИ СЛУЧАЙНОГО ПРОЦЕССА 16-3. ИЗМЕРЕНИЕ ФУНКЦИЙ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ 16-4. ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННОЙ ФУНКЦИИ 16-5. АНАЛИЗ СПЕКТРА МОЩНОСТИ Список литературы |

Приборы измерительные | Символы УГО для Visio
- Главная
- Схема электрическая принципиальная.
- Состав
 org/ListItem»>Библиотеки Visio
org/ListItem»>Библиотеки VisioТрафареты Visio:
<
Трафарет Visio Приборы измерительные.
| Фигура Visio | Условное обозначение |
|---|---|
| Измеритель тока: килоамперметр, амперметр, миллиамперметр, микроамперметр. Примечания: 1, 2. | |
| Измеритель напряжения: киловольтметр, вольтметр, милливольтметр, микровольтметр, вольтметр двойной, вольтметр дифференциальный. Примечания: 1, 2. | |
Измеритель мощности: вольтамперметр, мегаваттметр, киловаттметр, ваттметр, ваттметр суммирующий, мегаварметр, киловарметр, варметр. |
|
| Измеритель сопротивления: мегаомметр, килоомметр, омметр, миллиомметр, микроомметр. Примечания: 1, 2. | |
| Гальванометр. Примечание 1. | |
| Синхроноскоп. Примечание 1. | |
| Осциллограф. Примечание 1. | |
| Гальванометр осциллографический: тока или напряжения, мгновенной мощности. |
|
| Частотомер: MHz, kHz, Hz. Примечания: 1, 2. | |
| Фазометр (измеритель сдвига фаз), измеритель коэффициента мощности. Примечания: 1, 2. | |
| Часы электрические: первичные, вторичные, с контактным устройством. | |
Измеритель неэлектрических параметров: термометр, тахометр, измеритель давления, измеритель уровня жидкости, соленомер. Примечания: 1, 2. Примечания: 1, 2. |
|
| Термопара. | |
| Термопара с нагревательным элементом. |
Примечания:
- Показывающий, регистрирующий, комбинированный.
- Характеристика отсчетного устройства: отклоняться влево, отклоняться вправо, отклоняться обе стороны, вибрационной системы, с цифровым отсчётом, с непрерывной регистрацией, с точечной регистрацией, с цифровой регистрацией.
Для символов условных обозначений приборов измерительных, в контекстном меню фигуры Visio, можно выбрать или изменить:
тип прибора: показывающий, регистрирующий или комбинированный (рис. 1),
<
Рис. 1. Изменение типа измерительного прибора на условном обозначении.
измеряемые параметры (рис. 2)
<
Рис. 2. Выбор измеряемых параметров измерительного прибора на условном обозначении.
характеристику отсчетного устройства. На рис. 3, для прибора измерения температуры, выбрана характеристика с цифровым отсчетом
На рис. 3, для прибора измерения температуры, выбрана характеристика с цифровым отсчетом
<
Рис. 3. Выбор характеристики отсчетного устройства измерительного прибора на условном обозначении.
Если выбрана какая либо характеристика отсчетного устройства для отображения на условном обозначении прибора, текстовый блок, предназначенный для обозначения измеряемой величины, автоматически смещается, как показано на рис. 3.
В таблице ниже, показаны возможные варианты отображения отсчетного устройства для милливольтметра показывающего
| Фигура Visio | Варианты условного обозначения |
|---|---|
| Миллиамперметр, подвижная часть которого может отклоняться от нулевой отметки вправо. | |
| Миллиамперметр, подвижная часть которого может отклоняться от нулевой отметки влево. | |
Миллиамперметр, подвижная часть которого может отклоняться в обе стороны от нулевой отметки. |
|
| Миллиамперметр, с цифровым отсчетом. | |
| Миллиамперметр, с непрерывной регистрацией (записывающий). | |
| Миллиамперметр, с точечной регистрацией (записывающий). | |
| Миллиамперметр, печатающий с цифровой регистрацией. |
- Назад
- Вперед
Подписи предоставлены нашими авторами.
RM ID: Идентификатор изображения: RFWBJY
Предварительный просмотр
Сведения о изображении
Вклад:
Book Worm/
Alamy Stock Photo
ID ID:
RFWBJY
. 419,4 КБ Сжатая загрузка)
419,4 КБ Сжатая загрузка)Откройте файл изображения в полном размере с помощью программного обеспечения для обработки изображений.
Выпуски:
Модель — нет | Собственность — нет Нужен ли релиз?
Размеры:
1565 x 1596 пикселей | 26,5 х 27 см | 10,4 х 10,6 дюйма | 150 dpi
Дополнительная информация:
Это изображение является общественным достоянием, что означает, что либо срок действия авторских прав на изображение истек, либо правообладатель отказался от своих авторских прав. Alamy взимает с вас плату за доступ к копии изображения в высоком разрешении. 9.. Кио. 43.—Схема электрических соединений ртутного выключателя. Верхняя часть диаграммы представляет собой термометры и соединения, а также гальванометр, с которым соединен мост. Четыре секции этой системы тепловых соединений соединены с четырьмя верхними ключами переключателя. Четыре секции внутренней системы тепловых спаев, z. д., № i, связаны с четырьмя ключами, расположенными непосредственно под ключами для системы № 3. Для того, чтобы алгебраическая сумма электродвижущих сил для четырех частей системы. Обратите внимание, что эти изображения извлечены из отсканированных изображений страниц, которые, возможно, были улучшены в цифровом виде для удобства чтения — цвет и внешний вид этих иллюстраций могут не совсем соответствовать оригинальной работе. Вашингтонский институт Карнеги. Вашингтон, Институт Карнеги в Вашингтоне
д., № i, связаны с четырьмя ключами, расположенными непосредственно под ключами для системы № 3. Для того, чтобы алгебраическая сумма электродвижущих сил для четырех частей системы. Обратите внимание, что эти изображения извлечены из отсканированных изображений страниц, которые, возможно, были улучшены в цифровом виде для удобства чтения — цвет и внешний вид этих иллюстраций могут не совсем соответствовать оригинальной работе. Вашингтонский институт Карнеги. Вашингтон, Институт Карнеги в Вашингтоне
Search stock photos by tags
bookauthorcarnegiebookcentury1900bookdecade1900bookyear1905
US Patent for Galvanometer controller and laser machining apparatus Patent (Patent # 6,674,045 issued January 6, 2004)
BACKGROUND OF THE INVENTION
1. Field of the Invention
Настоящее изобретение относится к контроллеру гальванометра для управления гальванометром, выполняющим сканирование лазерным лучом с высокой скоростью и с высокой точностью, и к устройству лазерной обработки, имеющему контроллер гальванометра.
2. Описание предшествующего уровня техники
Устройства лазерной обработки использовались для сверления, резки, сварки, маркировки, обрезки и т. д. на заготовках. Также для механической обработки обычно используются методы сканирования лазерным лучом заготовки в двух измерениях. В одном методе лазерный луч сканируется с помощью гальванометра или многоугольного зеркала, а в другом методе сканирование альтернативно выполняется путем перемещения стола X-Y, на котором установлена заготовка.
Метод сканирования таблицы X-Y имеет проблемы, связанные с трудностью выполнения высокоскоростного вождения, проблемой медленного отклика и проблемой увеличения общего размера устройства. Напротив, метод гальванометрического сканирования с использованием гальванометра, который осуществляет вращательный привод вдоль каждого из направлений X и Y, имеет преимущества, заключающиеся в обеспечении высокоскоростного сканирования, обеспечении высокой точности и упрощении конструкции устройства, включающего сканер.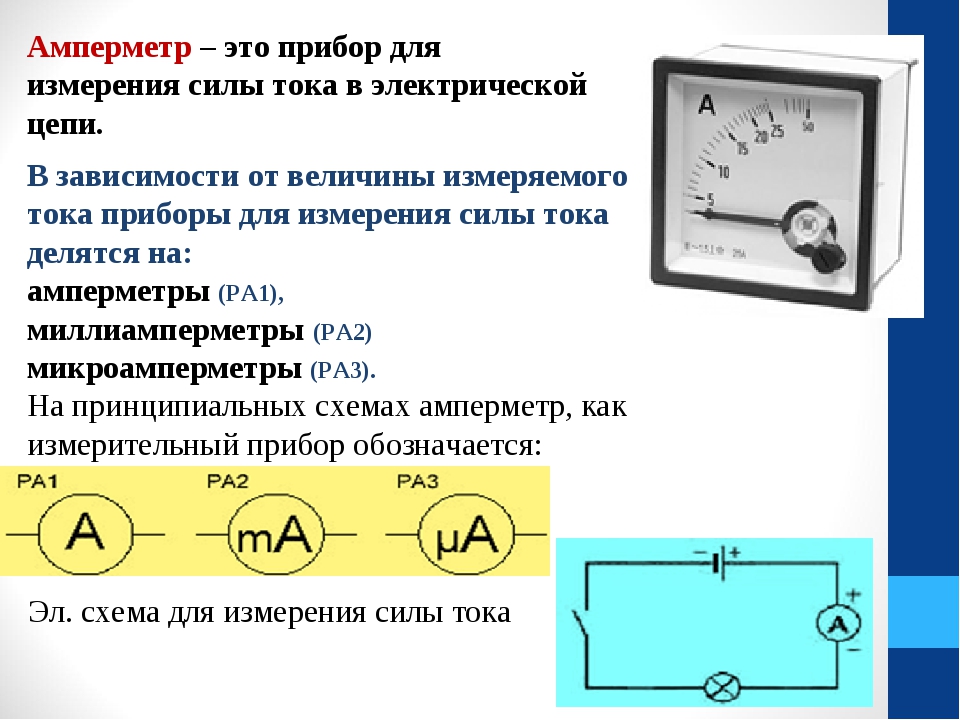 уменьшен в размере.
уменьшен в размере.
Устройство для лазерной обработки с использованием гальванометра выполняет обработку таким образом, что вращательные операции гальванометра, имеющего две оси в направлениях X и Y, контролируются вращательным приводом, а заготовка облучается лучом лазерного света отражается зеркалами и конденсируется оптическим устройством, таким как конденсорная линза, и обрабатывается за счет расплавления и испарения под действием энергии лазерного луча, как показано на фиг. 1 Этот тип лазерного обрабатывающего устройства имеет высокое разрешение порядка микрорадиан и широкий угол сканирования, способен работать на высокой скорости и особенно подходит для использования в области обработки для точного формирования мелких отверстий размером на порядка микрон.
Гальванометр в устройстве для лазерной обработки имеет датчик положения, такой как емкостной датчик, для определения положения каждого зеркала. Гальванометр точно приводится в действие на высокой скорости за счет управления с обратной связью, используя воспринятый сигнал положения от емкостного датчика.
Однако обычный контроллер для управления гальванометром, используемым для выполнения сканирования лазерным лучом в устройствах лазерной обработки, обычно состоит из элементов аналоговой схемы и поэтому имеет проблемы, описанные ниже.
Во-первых, во время использования гальванометра после времени первоначальной настройки гальванометра настроенное состояние изменяется из-за изменений во времени аналоговых устройств, составляющих аналоговую схему. То есть, вообще говоря, устройства, составляющие схему, изменяются со временем, а изменения со временем в устройствах по своей сути добавляются к обработанному сигналу. По этой причине возникает ошибка в контроле положения гальванометра.
Во-вторых, изменение настроенного состояния гальванометра обусловлено изменением характеристик аналоговых устройств, составляющих цепь, в зависимости от изменения температуры окружающей среды. То есть в случае, когда температура окружающей среды, в которой установлено устройство для лазерной обработки, может сильно изменяться, происходит значительное изменение характеристики схемы управления, и поэтому по своей природе требуется частая регулировка положения гальванометра в соответствии с изменениями температуры окружающей среды.
В-третьих, как правило, аналоговая схема имеет много точек настройки, таких как регулировка переменного резистора и повышенное количество технологических шагов, поэтому для точной настройки также требуется квалифицированный специалист. Соответственно, при регулировке, основанной на использовании аналоговой схемы, требуется сложная процедура регулировки, и лицам, не имеющим опыта обращения с устройством, становится трудно выполнять операции регулировки.
В-четвертых, трудно количественно оценить отрегулированное состояние гальванометра, потому что гальванометр настраивается путем настройки переменных аналоговых элементов схемы, и желаемое качество управления не может быть получено со стабильностью. То есть при аналоговой регулировке опыт и интуиция опытного оператора являются важными факторами, а регулировка зависит от оператора, так что аппарат не всегда может работать в одних и тех же условиях.
В-пятых, в случае, когда требуется новая функция контроллера гальванометра, необходимо изменить аппаратное обеспечение самого контроллера, поскольку контроллер состоит из аналоговой схемы. Соответственно, сложно расширять или добавлять функции в контроллере с использованием элементов аналоговой схемы.
Соответственно, сложно расширять или добавлять функции в контроллере с использованием элементов аналоговой схемы.
В-шестых, в целом характеристики гальванометра меняются в зависимости от изменения температуры и изменения влажности. Таким образом, даже если характеристика схемы контроллера гальванометра поддерживается постоянной в условиях изменения температуры, характеристики самого гальванометра по своей сути изменяются в зависимости от изменения температуры и изменения влажности, вызывая тем самым ошибочную работу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Ввиду вышеописанных проблем, целью настоящего изобретения является создание контроллера гальванометра, способного управлять гальванометром со стабильностью и устойчивостью к изменениям во времени и колебаниям температуры окружающей среды. и с улучшенной работоспособностью и расширяемостью.
Другой целью настоящего изобретения является создание устройства для лазерной обработки, имеющего упомянутый выше контроллер гальванометра.
Для достижения вышеописанной цели в соответствии с настоящим изобретением предусмотрен контроллер гальванометра, который управляет направлением лазерного сканирования, выполняемого гальванометром по каждой из двух осей, причем контроллер гальванометра содержит корректирующее устройство, выполненное в цифровом виде. схема, кроме того, корректирующее устройство, имеющее секцию коррекции искажения для исправления рабочего искажения оптического блока, включающего в себя линзу, секцию коррекции ортогональности для коррекции ортогональности между двумя осями гальванометра и секцию коррекции линейности для коррекции линейности по каждой из двух осей. Кроме того, предпочтительно, чтобы контроллер гальванометра включал в себя детектор температуры/влажности и средство управления характеристикой для управления его характеристикой в соответствии с изменением температуры или изменением влажности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые и другие цели, особенности и преимущества настоящего изобретения станут более очевидными при обращении к следующему подробному описанию изобретения в сочетании с прилагаемыми чертежами, на которых:
РИС. 1 представляет собой схему, схематически показывающую обрабатывающее устройство с использованием гальванометров, в котором применяется настоящее изобретение;
1 представляет собой схему, схематически показывающую обрабатывающее устройство с использованием гальванометров, в котором применяется настоящее изобретение;
РИС. 2 представляет собой схему, схематически показывающую конфигурацию контроллера гальванометра согласно первому варианту осуществления настоящего изобретения;
РИС. 3 представляет собой блок-схему блока управления гальванометром, показанного на фиг. 2;
РИС. 4 показывает набор диаграмм для пояснения искажения, вызванного оптическим блоком;
РИС. 5 показана арифметическая схема для исправления искажения, показанного на фиг. 4;
РИС. 6 схематично показан процесс определения коэффициентов, применяемых к арифметической схеме, показанной на фиг. 5;
РИС. 7 показывает арифметическую схему для исправления ортогональной ошибки согласно настоящему изобретению;
РИС. 8 схематично показан процесс определения коэффициентов, применяемых к арифметической схеме, показанной на фиг. 7;
РИС. 9 показывает набор диаграмм для схематического пояснения коррекции линейности согласно настоящему изобретению;
9 показывает набор диаграмм для схематического пояснения коррекции линейности согласно настоящему изобретению;
РИС. 10 представляет собой еще одну диаграмму для схематического пояснения линейности согласно настоящему изобретению;
РИС. 11 представляет собой блок-схему, схематически показывающую блок управления гальванометром согласно второму варианту осуществления настоящего изобретения;
РИС. 12 представляет собой блок-схему, схематически показывающую блок управления гальванометром согласно третьему варианту осуществления настоящего изобретения.
РИС. 13 представляет собой блок-схему, схематически показывающую контроллер гальванометра согласно четвертому варианту осуществления настоящего изобретения;
РИС. 14 показана конфигурация датчика положения в четвертом варианте осуществления, показанном на фиг. 13; и
РИС. 15 схематично показана конфигурация стола преобразователя температуры/влажности в четвертом варианте осуществления, показанном на фиг. 13.
13.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Контроллер гальванометра и устройство лазерной обработки, использующее контроллер гальванометра, будут описаны со ссылкой на фиг. 1, 2 и 3. Устройство лазерной обработки по фиг. 1 содержит оптический блок гальванометра, содержащий гальванометр с осью X, гальванометр с осью Y, зеркала сканера и f&thgr. объектив. На фиг. 1, лазерный луч отклоняется для сканирования зеркалами сканера, прикрепленными к гальванометрам с осями X и Y, и конденсируется f&thgr; линза на заготовке. ИНЖИР. 2 представляет собой схему, схематически показывающую конфигурацию контроллера гальванометра согласно первому варианту осуществления настоящего изобретения, а фиг. 3 показана деталь части на фиг. 2. На фиг. 2, устройство для лазерной обработки имеет источник лазерного луча (не показан), отражатели 6а и 6b гальванометра, которые соответственно отражают по осям X и Y лазерный луч, датчики положения 7а и 7b, которые соответственно определяют положение гальванометра. дефлекторы, контроллер 16 гальванометра, который управляет дефлекторами гальванометра, обращаясь к воспринимаемым сигналам от датчиков положения, оптический блок, который конденсирует на изделии лазерный луч, отраженный дефлекторами гальванометра, и главный контроллер 1, который управляет контроллером гальванометра.
дефлекторы, контроллер 16 гальванометра, который управляет дефлекторами гальванометра, обращаясь к воспринимаемым сигналам от датчиков положения, оптический блок, который конденсирует на изделии лазерный луч, отраженный дефлекторами гальванометра, и главный контроллер 1, который управляет контроллером гальванометра.
Как показано на фиг. 2, контроллер 16 гальванометра состоит из порта 8 ввода/вывода, через который сигнал цифровой команды положения вводится от главного контроллера 1, цифрового блока управления 2, который выполняет цифровую обработку сигнала, цифро-аналоговых преобразователей 3a и 3b, которые преобразуют выходные сигналы управления гальванометра от цифрового блока управления 2 в аналоговые сигналы, усилители мощности 4а и 4b, которые усиливают выходные сигналы цифро-аналоговых преобразователей 3а и 3b и управляют дефлекторами гальванометра 6а и 6b, и аналого-цифровые преобразователи 5а и 5b, которые поставляются с выходными сигналами от датчиков положения 7а и 7b, предусмотренных на дефлекторах гальванометра с осями X и Y, и которые преобразуют эти аналоговые сигналы в цифровые сигналы.
Работа сконструированного таким образом контроллера 16 гальванометра будет описана ниже. Команда положения и параметры, поступающие от главного контроллера 1, вводятся в цифровой блок управления 2. Воспринятые сигналы в аналоговой форме от датчиков положения 7а и 7b на дефлекторах гальванометра 6а и 6b преобразуются в цифровые сигналы с помощью аналого-цифрового преобразователя. преобразователи 5а и 5б. Преобразованные цифровые сигналы вводятся в цифровой блок управления 2. С другой стороны, цифровые сигналы для управления дефлекторами 6а и 6b гальванометра выводятся из цифрового блока управления 2 и преобразуются в аналоговые сигналы цифро-аналоговыми преобразователями 3а. и 3б. Усилители мощности 4а и 4b усиливают преобразованные аналоговые сигналы и, соответственно, управляют дефлекторами 6а и 6b гальванометра усиленными сигналами. Оптический блок сканирует поверхность детали, установленной на столе, лазерным лучом, отраженным от дефлекторов гальванометра 6а и 6б, для выполнения различных видов работ, таких как маркировка, обрезка, растачивание и сварка.
Ссылаясь на фиг. 3, в цифровом блоке 2 управления, характеризующемся настоящим изобретением, обработка коррекции различных видов выполняется секцией 9 коррекции искажения, секцией 10 коррекции ортогональности и секциями 11a и 11b коррекции линейности, в то время как данные команды положения от главного контроллера 1 до порт ввода/вывода 8 является входным. Секция 9 коррекции искажения корректирует рабочее искажение, которое возникает, когда используется рабочий объектив, имеющий оптическое искажение. Секция 10 коррекции ортогональности корректирует ошибку ортогональности между двумя осями дефлекторов 6а и 6b гальванометра. Каждая из секций 11а и 11b коррекции линейности корректирует ошибку линейности на соответствующей оси. Блоки 12а и 12b следующей ступени являются блоками пропорционального, интегрального и дифференциального (ПИД) управления и хорошо известны в области техники, в которых обработка ПИД-управления выполняется с использованием сигналов положения 13а и 13b обратной связи, представляющих положения гальванометра. дефлекторы 6а и 6б. Результаты этой обработки выводятся в виде выходных сигналов 14а и 14b для управления дефлекторами 16а и 6b гальванометра. Параметры для каждой обработки коррекции и обработки управления могут быть перезаписаны в таблице параметров 15 путем подачи от главного контроллера 1 через порт ввода/вывода 8.
дефлекторы 6а и 6б. Результаты этой обработки выводятся в виде выходных сигналов 14а и 14b для управления дефлекторами 16а и 6b гальванометра. Параметры для каждой обработки коррекции и обработки управления могут быть перезаписаны в таблице параметров 15 путем подачи от главного контроллера 1 через порт ввода/вывода 8.
Будет описана коррекция в секции 9 коррекции искажения. В оптическом блоке, использующем гальванометры, бочкообразные и звездообразные искажения, как показано на фиг. 4, вызваны в рабочей плоскости искажениями оптического блока, включая f&thgr; объектив и зеркала сканера. Чтобы скорректировать бочкообразные и звездообразные искажения, обработка коррекции выполняется цифровой арифметической схемой, показанной на фиг. 5. Данные после коррекции искажения выражены Xo и Yo.
Xo=(1+Ko2Yi2)Xi
Yo=(1+Ko1Xi2)Yi
Где; Xi и Yi представляют собой командные данные оси X и оси Y соответственно.
Из этих уравнений искажение в направлении оси X можно скорректировать с помощью коэффициента усиления Ko2, выраженного функцией второго порядка по оси Y. Кроме того, искажение в направлении оси Y можно скорректировать с помощью коэффициента усиления Ko1. Как показано на фиг. 6, для поиска коэффициентов Ko1 и Ko2 используются следующие уравнения после обнаружения фактических искажений (ошибок) &Dgr;X и &Dgr;Y по осям X и Y, в то время как командные данные квадратной фигуры, показанные на фиг. 4 применяются.
Кроме того, искажение в направлении оси Y можно скорректировать с помощью коэффициента усиления Ko1. Как показано на фиг. 6, для поиска коэффициентов Ko1 и Ko2 используются следующие уравнения после обнаружения фактических искажений (ошибок) &Dgr;X и &Dgr;Y по осям X и Y, в то время как командные данные квадратной фигуры, показанные на фиг. 4 применяются.
Ko1=&Dgr;Y/(Yi Xi2)
Ko2=&Dgr;X/(Xi Yi2)
Далее будет описана коррекция ортогональной ошибки, выполняемая в секции 10 коррекции ортогональности. Имеются ошибки ортогональности относительно осей X и Y, зависящие от крепления гальванометров по осям X и Y, наклона зеркал сканера и т. д. Для исправления ошибки ортогональности используется цифровая арифметическая схема, показанная на фиг. . 7 применяется. Данные после коррекции ортогональности выражены Xo и Yo.
Xo=(1+Kp2Yi)Xi
Yo=(1+Kp1Xi)Yi
Где; Xi представляет собой командные данные по оси X, а Yi представляет собой командные данные по оси Y. Из этих уравнений ортогональная ошибка в направлении оси X корректируется с помощью коэффициента наклона Kp2, выраженного линейной функцией по оси Y. Кроме того, ортогональная ошибка в направлении оси Y корректируется Kp1. Как показано на фиг. 8, для поиска коэффициентов Kp1 и Kp2 используются следующие уравнения после обнаружения фактических искажений (ошибок) &Dgr;X и &Dgr;Y по осям X и Y, в то время как данные квадратной команды, показанные на фиг. Вводится 8.
Из этих уравнений ортогональная ошибка в направлении оси X корректируется с помощью коэффициента наклона Kp2, выраженного линейной функцией по оси Y. Кроме того, ортогональная ошибка в направлении оси Y корректируется Kp1. Как показано на фиг. 8, для поиска коэффициентов Kp1 и Kp2 используются следующие уравнения после обнаружения фактических искажений (ошибок) &Dgr;X и &Dgr;Y по осям X и Y, в то время как данные квадратной команды, показанные на фиг. Вводится 8.
Kp1=&Dgr;Y/Xi
Kp2=&Dgr;X/Yi
Далее будет описана коррекция линейности (коррекция сетки). Погрешности из-за разницы в точности гальванометров и искажений в оптическом блоке влияют на точность работы. Коррекция линейности предназначена для исправления нелинейных ошибок, которые не могут быть исправлены ни с помощью вышеуказанной коррекции искажения, ни с помощью коррекции ортогональности. Коррекция линейности выполняется таким образом, что величина ошибки измеряется заранее в каждой из точек измерения, установленных в соответствии с ячейками, как показано на фиг. 9. В этом случае точки пересечения сеток соответствуют командным точкам, которые заранее установлены для обнаружения ошибок от X1 до X4. После этого, по отношению к каждой командной точке во время операции обработки, значение коррекции по оси X вычисляется из величин ошибки &Dgr;X1 до &Dgr;X4 в четырех точках, окружающих командную точку, и из заданных данных положения от a до d на командная точка, как показано на фиг. 9. Как показано на фиг. 10, поправочное значение &Dgr;Xp по оси X можно вычислить с помощью следующих уравнений:
9. В этом случае точки пересечения сеток соответствуют командным точкам, которые заранее установлены для обнаружения ошибок от X1 до X4. После этого, по отношению к каждой командной точке во время операции обработки, значение коррекции по оси X вычисляется из величин ошибки &Dgr;X1 до &Dgr;X4 в четырех точках, окружающих командную точку, и из заданных данных положения от a до d на командная точка, как показано на фиг. 9. Как показано на фиг. 10, поправочное значение &Dgr;Xp по оси X можно вычислить с помощью следующих уравнений:
&Dgr;X5=&Dgr;X1+(&Dgr;X2-&Dgr;X1)*a/(a+b)
&Dgr;X6=&Dgr;X3+(&Dgr;X4-&Dgr;X3)*a/( a+b)
&Dgr;Xp=&Dgr;X5+(&Dgr;X6-&Dgr;X5)*c/(c+d)
Значение коррекции по оси Y вычисляется таким же образом.
В контроллере гальванометра 16 этого варианта осуществления схемы для выполнения различных видов обработки, включая обработку для исправления рабочего искажения линзы, обработку для исправления ортогональности между двумя осями, обработку для исправления линейности по каждой оси , и обработка ПИД-управления с использованием воспринятых сигналов 13а и 13b положения в качестве сигналов обратной связи, а также таблица управления для хранения и управления параметрами для каждой обработки коррекции предусмотрены в цифровом блоке 2 управления, что позволяет уменьшить изменения характеристик из-за к изменениям со временем в контроллере или факторах рабочей среды и, таким образом, к стабильному управлению дефлекторами гальванометра. За счет управления параметрами для каждой обработки с главного контроллера 1 операции по регулировке дефлекторов гальванометра могут выполняться более легко, и, кроме того, неквалифицированный оператор может легко и надежно выполнять операции по регулировке.
За счет управления параметрами для каждой обработки с главного контроллера 1 операции по регулировке дефлекторов гальванометра могут выполняться более легко, и, кроме того, неквалифицированный оператор может легко и надежно выполнять операции по регулировке.
Далее со ссылкой на фиг. 11 и 12. Фиг. 11 показан цифровой блок 2′ управления второго варианта осуществления, а на фиг. 12 показана другая конфигурация контроллера гальванометра третьего варианта осуществления. Второй вариант отличается выполнением функции снижения влияния резонанса дефлекторов гальванометра. Третий вариант отличается выполнением функции автоматической оптимизации параметров в дополнение к параметрам по первому варианту. В остальном эти варианты осуществления аналогичны первому варианту осуществления. Ссылаясь на фиг. 11, цифровой блок 2′ управления дополнительно включает в себя схемы 17а и 17b режекции. Ссылаясь на фиг. 12, цифровой блок 2″ управления дополнительно включает в себя схему 18 автоматического поворота. В общем, дефлектор гальванометра имеет определенную резонансную частоту из-за своей конструктивной характеристики. Если рабочая частота дефлектора гальванометра близка к резонансной частоте, дефлектор гальванометра резонирует и возникает вибрация вращающегося вала дефлектора, что приводит к невозможности точного сканирования лазерным лучом. Во втором варианте с целью повышения точности сканирования схемы 17а и 17b режекции подключены к блокам ПИД-регулирования 12а и 12b для снижения резонирующей вибрации дефлекторов гальванометра.
В общем, дефлектор гальванометра имеет определенную резонансную частоту из-за своей конструктивной характеристики. Если рабочая частота дефлектора гальванометра близка к резонансной частоте, дефлектор гальванометра резонирует и возникает вибрация вращающегося вала дефлектора, что приводит к невозможности точного сканирования лазерным лучом. Во втором варианте с целью повышения точности сканирования схемы 17а и 17b режекции подключены к блокам ПИД-регулирования 12а и 12b для снижения резонирующей вибрации дефлекторов гальванометра.
Схема 18 автоматической настройки получает параметры из таблицы 15 параметров для сохранения и управления параметрами для использования в обработке коррекции и обработке управления, сравнивает параметры со значениями, введенными заранее, выполняет вычисления с использованием параметров и выполняет автоматическое управление таким образом, что параметры сходятся к оптимальным значениям.
Как описано выше, в цифровой блок встроены секции разного рода поправок и блоки ПИД-регулирования, а в блоке 2 предусмотрены дополнительные схемы, что позволяет управлять дефлекторами гальванометра с большей точностью при достижении одинакового эффект как у первого варианта.
В соответствии с вышеприведенными вариантами осуществления можно предотвратить изменение характеристики контроллера гальванометра из-за изменения температуры. Однако компенсировать характерное изменение самого гальванометра пока невозможно. В общем, характеристика гальванометра изменяется из-за изменения температуры и изменения влажности, и, следовательно, сигнал, определяемый положением от датчика 7 положения, изменяется. Четвертый вариант осуществления, показанный на фиг. 13 способен компенсировать характерные изменения гальванометра при изменении температуры и влажности. На фиг. 13, предусмотрен датчик температуры 19., детектор 20 влажности и таблица 23 преобразователя температуры/влажности. Обнаруженный сигнал температуры и обнаруженный сигнал влажности от детекторов 19 и 20 подаются на таблицу 23 преобразователя температуры/влажности через аналого-цифровые преобразователи 21 и 22 соответственно. В таблице 23 преобразователя температуры/влажности предварительно задан коэффициент усиления для воспринятого сигнала Vp положения, вырабатываемого датчиком 7 положения. В этом случае ошибка определения положения из-за изменения температуры и изменения влажности предварительно измеряется на практике, а после этого определяется и сохраняется в таблице коэффициент усиления для компенсации ошибки измерения положения. В качестве альтернативы, если коэффициент усиления может быть выражен функциональным уравнением в соответствии с изменением температуры и изменения влажности, можно составить таблицу 23, применив по меньшей мере одну функциональную таблицу. Кроме того, когда степень ошибки определения положения изменяется в соответствии с положением гальванометра, коэффициент усиления определяется в соответствии с обнаруженным положением в дополнение к температуре и влажности. Данные коэффициента усиления Dg выводятся из таблицы 23 и подаются датчиком положения 7 через цифро-аналоговый преобразователь 24.
В этом случае ошибка определения положения из-за изменения температуры и изменения влажности предварительно измеряется на практике, а после этого определяется и сохраняется в таблице коэффициент усиления для компенсации ошибки измерения положения. В качестве альтернативы, если коэффициент усиления может быть выражен функциональным уравнением в соответствии с изменением температуры и изменения влажности, можно составить таблицу 23, применив по меньшей мере одну функциональную таблицу. Кроме того, когда степень ошибки определения положения изменяется в соответствии с положением гальванометра, коэффициент усиления определяется в соответствии с обнаруженным положением в дополнение к температуре и влажности. Данные коэффициента усиления Dg выводятся из таблицы 23 и подаются датчиком положения 7 через цифро-аналоговый преобразователь 24.
На фиг. 14, показывающий датчик 7 положения, начальный уровень измеренного положения от детектора 25 угла регулируется в ответ на сигнал коэффициента усиления Vg от цифро-аналогового преобразователя 24. На фиг. 15, показывающий один пример таблицы 23 преобразователя температуры/влажности, данные Dt температуры и данные Dw влажности преобразуются в функциональных таблицах 27 и 28, и преобразованные данные перемножаются. Далее перемноженные данные корректируются на индивидуальный разностный коэффициент Ky в зависимости от каждого гальванометра 6 в цепи коррекции 29..
На фиг. 15, показывающий один пример таблицы 23 преобразователя температуры/влажности, данные Dt температуры и данные Dw влажности преобразуются в функциональных таблицах 27 и 28, и преобразованные данные перемножаются. Далее перемноженные данные корректируются на индивидуальный разностный коэффициент Ky в зависимости от каждого гальванометра 6 в цепи коррекции 29..
Как описано выше, контроллер гальванометра и устройство для лазерной обработки с контроллером гальванометра имеют преимущества, описанные ниже.
Во-первых, поскольку почти вся обработка сигналов, относящаяся к управлению дефлекторами гальванометра, выполняется цифровым способом в цифровом блоке управления, в состоянии настройки не происходит никаких изменений из-за изменения во времени компонентов схемы.
Во-вторых, не происходит никаких изменений из-за изменения температуры окружающей среды по той же причине, что и первое преимущество.
В-третьих, качество настройки может быть улучшено по той же причине, что и третье преимущество.