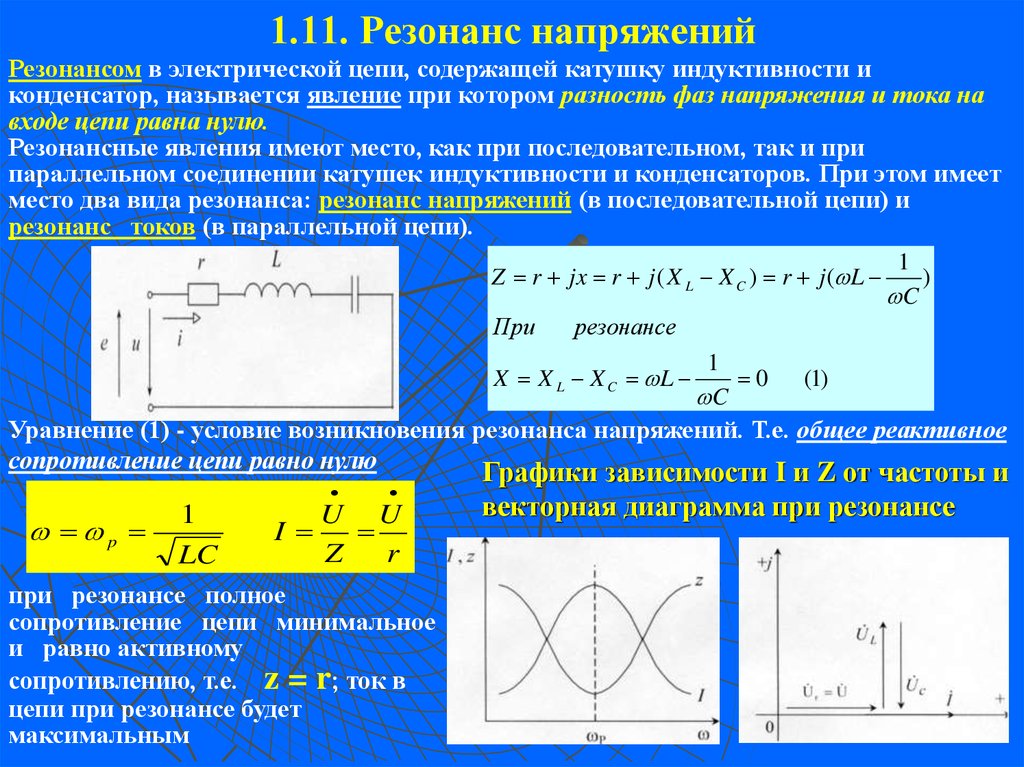
Зависимость частоты и напряжений от баланса мощности
Остановимся прежде всего на основном и общем для рассматриваемых задач вопросе: выясним, от чего зависят величины частоты и напряжений, устанавливающиеся в электроэнергетической системе.
Каждый из приемников энергии, присоединенных к электрической сети, потребляет активную и реактивную мощности, величины которых, как уже отмечалось ранее, определяются величиной напряжения на его зажимах и частотой. Мощность, идущая на питание приемников энергии и покрытие потерь в сети, соединяющей приемники с некоторой узловой точкой системы, в данном режиме нагрузки зависит только от частоты и величины напряжения в данной узловой точке.
Следовательно,
нагрузка любой узловой точки однозначно
(в области нормальных значений частоты
и напряжения) определяется частотой и
напряжением в этой точке. Статические
характеристики нагрузки в некоторой
узловой точке представляют собой, как
известно, зависимости активной и
реактивной мощностей этой нагрузки от
напряжения при заданной частоте.
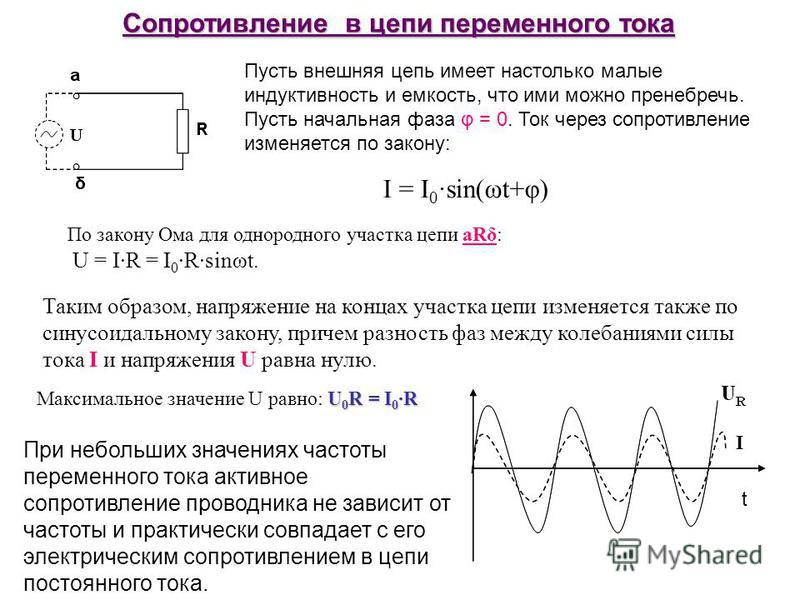
Рис. 2. Зависимости активной и реактивной мощности от напряжения
Обеспечить в данной узловой точке некоторые заданные значения частоты и напряжения можно, только передавая к ней из системы совершенно определенные величины активной и реактивной мощностей. Эти величины при заданных частоте и напряжении можно определить по соответствующим статическим характеристикам нагрузок. Если почему-либо из внешней сети в узловую точку будет поступать недостаточная активная или реактивная мощность, то заданные значения частоты и напряжения не могут установиться в этой узловой точке: параметры фактического режима будут иными. Рассмотрим несколько детальнее этот вопрос.
Пусть заданные семейства статических характеристик выражаются в неявной форме следующими зависимостями:
Величины
активной и реактивной мощностей,
притекающих к данной узловой точке
системы, зависят как от величины U и
фазы
напряжения в этой узловой точке, так и
от величин и фаз напряжений в смежных
узловых точках и сопротивлений,
соединяющих участки сети.
Эти два уравнения с двумя неизвестными и позволяют определить U и .
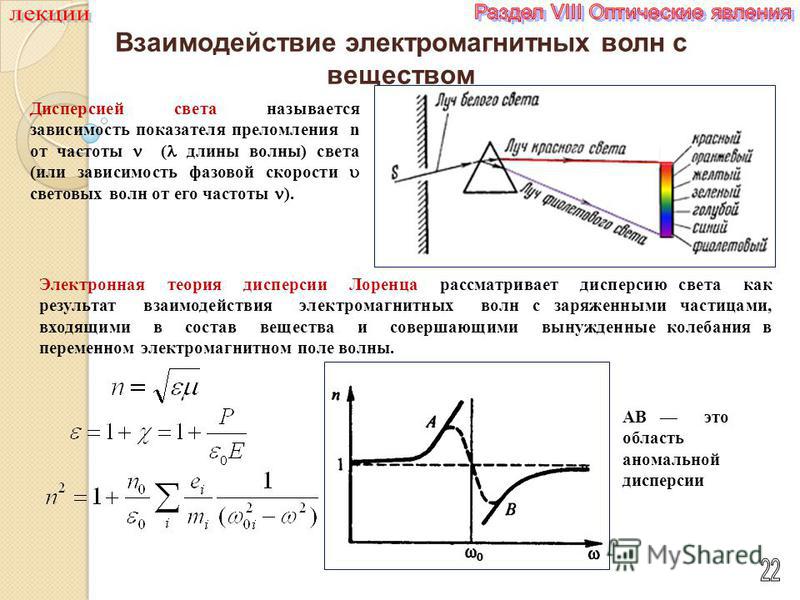
Покажем,
как графически решается эта задача.
Совместим на одной диаграмме (рис. 3)
характеристику PН = Ф1(U),
соответствующую заданному значению f,
и семейство характеристик Pг=1(U, ),
соответствующих тому же значению f,
но при разных значениях . Так как PГ = PН,
то из этой диаграммы по точкам пересечения
может быть определена зависимость
= Ф(
Так как PГ = PН,
то из этой диаграммы по точкам пересечения
может быть определена зависимость
= Ф(
 4).
4).Рис. 3. Определение зависимости угла сдвига (фазы) от величины напряжения
Все наши предыдущие рассуждения относились к случаю неизменности по величине и фазе напряжений в смежных узловых точках и частоты в системе. В действительности такой неизменности нет и напряжения во всех узловых точках могут изменяться по величине и фазе; может также изменяться и частота системы.
Рис. 4. Построение характеристики зависимости Q от U
Однако в системе можно найти такие узловые точки, в которых поддерживается неизменное по величине и фазе или только по величине напряжение или из которых в сеть передается определенная активная мощность.
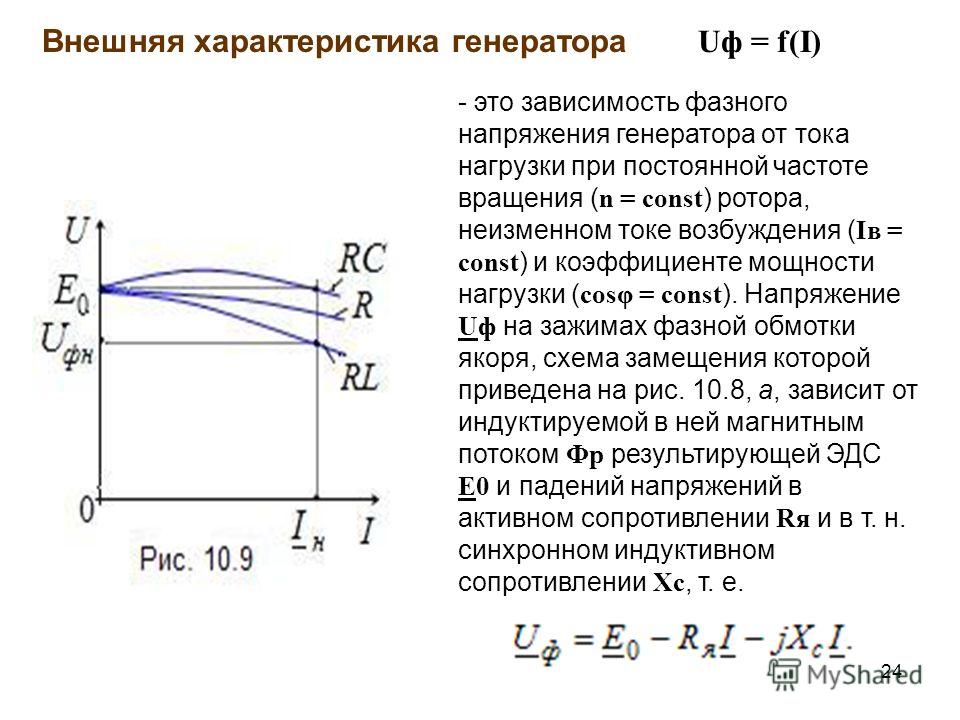
При определенном впуске энергоносителя и нормальных значениях параметров режима первичный двигатель развивает мощность, зависящую только от частоты сети, и, следовательно, электромагнитная мощность генератора в этих условиях зависит только от частоты:
Pг=Ф(U).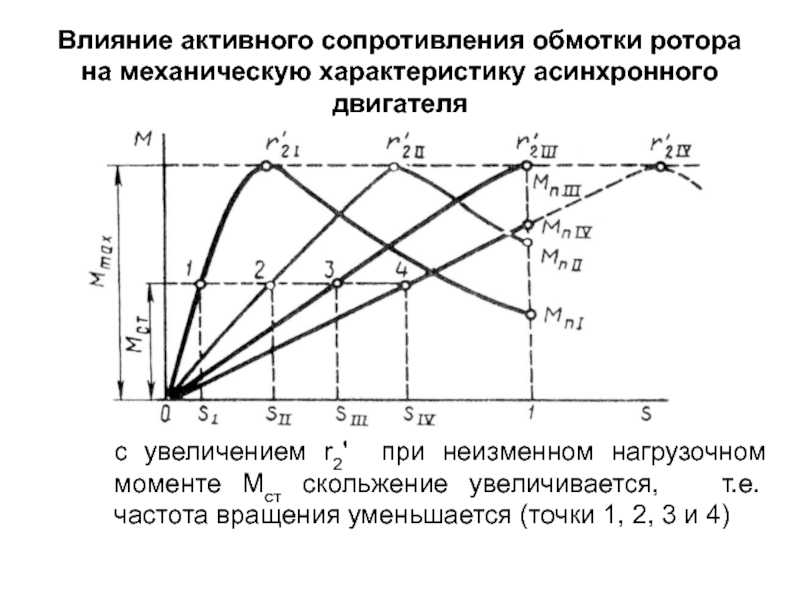
При постоянстве тока возбуждения генератора неизменной является величина э.д.с. генератора Ed, а при наличии регуляторов возбуждения неизменной или почти неизменной будет величина напряжения на его выводах.
В системе должен быть баланс активных и реактивных мощностей: сумма активных и реактивных мощностей всех генераторов должна равняться сумме активных и реактивных мощностей нагрузок всех узловых точек и потерь активной и реактивной мощностей во всех элементах сетей. Следовательно, частота во всей системе, а также величина и фаза напряжения в каждой из узловых точек установятся как раз такими, которые требуются по условию баланса мощностей.
Пусть
в системе установился некоторый режим.
Изменим впуск энергоносителя в первичный
двигатель одного из генераторов. Угол
сдвига ротора этого генератора также
изменится. Во всей системе произойдет
изменение частоты, а также изменение
величин и фаз напряжений во всех узловых
точках. Эти изменения будут происходить
во времени до тех пор, пока не установится
новый режим баланса мощностей в системе.
Процесс этот является далеко не таким
простым, как можно было бы предполагать.
В самом деле, например, уменьшение впуска
энергоносителя вызовет уменьшение угла
сдвига ротора данного генератора
относительно других, активные нагрузки
других генераторов возрастут. Появится
небаланс на валах каждого из этих
генераторов, и они начнут тормозиться.
В связи с этим генератор, у первичного
двигателя которого уменьшился впуск
энергоносителя, также должен начать
тормозиться, так как при уменьшении
углов сдвига роторов остальных генераторов
он должен принять добавочную нагрузку.
Торможение всех генераторов будет
приводить к снижению общей частоты в
системе. По мере ее снижения будут
уменьшаться активные мощности нагрузок
узловых точек в соответствии с их
частотными статическими характеристиками
и увеличиваться мощности всех других
генераторов в соответствии со статическими
характеристиками регуляторов скорости
первичных двигателей
Эти изменения будут происходить
во времени до тех пор, пока не установится
новый режим баланса мощностей в системе.
Процесс этот является далеко не таким
простым, как можно было бы предполагать.
В самом деле, например, уменьшение впуска
энергоносителя вызовет уменьшение угла
сдвига ротора данного генератора
относительно других, активные нагрузки
других генераторов возрастут. Появится
небаланс на валах каждого из этих
генераторов, и они начнут тормозиться.
В связи с этим генератор, у первичного
двигателя которого уменьшился впуск
энергоносителя, также должен начать
тормозиться, так как при уменьшении
углов сдвига роторов остальных генераторов
он должен принять добавочную нагрузку.
Торможение всех генераторов будет
приводить к снижению общей частоты в
системе. По мере ее снижения будут
уменьшаться активные мощности нагрузок
узловых точек в соответствии с их
частотными статическими характеристиками
и увеличиваться мощности всех других
генераторов в соответствии со статическими
характеристиками регуляторов скорости
первичных двигателей

Оба эти фактора приведут к тому, что при достаточно большом снижении частоты вновь наступит баланс на валу каждого из генераторов; мощности, развиваемые первичными двигателями, будут балансироваться с мощностями нагрузки
генераторов. Дальнейшее снижение частоты прекратится. Необходимо учесть, что снижение частоты вызывает изменение Э.Д.С. всех генераторов, реактивных сопротивлений всех ветвей системы, а, следовательно, и всех напряжений в сети, что в свою очередь приведет к изменению активных и реактивных нагрузок всех узловых точек в соответствии с их статическими характеристиками по напряжению и частоте. Таким образом, процесс оказывается достаточно сложным.
Рассмотрим другой
случай. Пусть уставка регулятора
возбуждения на одном из крупных
генераторов системы будет снижена.
Тогда уменьшится выпуск реактивной
мощности от данного генератора, что
приведет к снижению напряжения по
крайней мере в близлежащем районе
электрической сети. Снижение напряжения
в свою очередь вызовет уменьшение
активных и реактивных нагрузок всех
узловых точек в соответствии с их
статическими характеристиками по
напряжению. Появится небаланс на валу
каждого из генераторов; углы сдвига их
роторов, а, следовательно, и скорости
их вращения будут расти. Это приведет
к повышению частоты, так как генераторы,
особенно близлежащие, разгрузятся.
Частота в системе будет расти, пока не
наступит новый баланс, обусловленный
ростом активных нагрузок системы. Рост
частоты в свою очередь повлияет на
увеличение напряжений.
Снижение напряжения
в свою очередь вызовет уменьшение
активных и реактивных нагрузок всех
узловых точек в соответствии с их
статическими характеристиками по
напряжению. Появится небаланс на валу
каждого из генераторов; углы сдвига их
роторов, а, следовательно, и скорости
их вращения будут расти. Это приведет
к повышению частоты, так как генераторы,
особенно близлежащие, разгрузятся.
Частота в системе будет расти, пока не
наступит новый баланс, обусловленный
ростом активных нагрузок системы. Рост
частоты в свою очередь повлияет на
увеличение напряжений.
Такова сложная взаимосвязь изменений частоты, напряжения и активных и реактивных мощностей в системе. Однако для решения практических вопросов можно упростить задачу путем некоторой идеализации.
Так, отвлекаясь от изменений напряжений и реактивных мощностей, можно считать, что изменение баланса активных мощностей в системе определенным образом сказывается только на изменении частоты.
Действительно,
рост активной нагрузки потребителей
или снижение активной мощности генераторов
в первую очередь вызывает
определенное
для данного режима снижение частоты в
системе. Практически именно это является
наиболее существенным. Менее существенным
является то, что это изменение частоты
будет в некоторой степени различным в
зависимости от того, в какой узловой
точке выросла активная нагрузка или у
какого именно генератора снизилась
активная мощность. Это различие
обусловлено влиянием других факторов
(напряжений, реактивных мощностей) и не
столь велико. Снижение частоты,
обусловленное возникновением дефицита
активной мощности, обязательно приведет
к восстановлению баланса, так как при
этом в связи со снижением частоты и
напряжений активная нагрузка уменьшается.
В то же время регуляторы скорости
первичных двигателей и частоты увеличивают
впуск энергоносителя, и активная мощность
генераторов растет.
Практически именно это является
наиболее существенным. Менее существенным
является то, что это изменение частоты
будет в некоторой степени различным в
зависимости от того, в какой узловой
точке выросла активная нагрузка или у
какого именно генератора снизилась
активная мощность. Это различие
обусловлено влиянием других факторов
(напряжений, реактивных мощностей) и не
столь велико. Снижение частоты,
обусловленное возникновением дефицита
активной мощности, обязательно приведет
к восстановлению баланса, так как при
этом в связи со снижением частоты и
напряжений активная нагрузка уменьшается.
В то же время регуляторы скорости
первичных двигателей и частоты увеличивают
впуск энергоносителя, и активная мощность
генераторов растет.
Количественное соотношение, т.е. зависимость относительного изменения частоты от относительного небаланса активной мощности, не является неизменным и в зависимости от режима работы системы может колебаться в довольно широких пределах.
Преобразователь частоты это | Принцип действия, КПД, конвертер, типы, описание, применение, устройства
Преобразователь частоты: вся информация об устройстве
Оглавление
Физическая основа преобразователей частоты.
Конструкция и принцип работы преобразователей частоты.
Выпрямитель.
Промежуточная цепь.
Инвертор.
Типы управления частотным преобразователем.
Интерфейсы частотных преобразователей.
ГОСТы и ТУ для частотных преобразователей.
Преимущества использования частотных преобразователей.
Недостатки преобразователей частоты.
Назначение и область применения частотных преобразователей.
Как выбрать частотный преобразователь?
Как осуществляется подключение преобразователя частоты?
Техника безопасности при подключении преобразователя частоты.
Преобразователь частоты – это статическое преобразовательное устройство, которое предназначено для регулировки частоты электрического тока. Преимущественно он используется для управления скоростью вращения двигателей асинхронного типа и позволяет повысить эффективность их работы, а также снизить изнашиваемость узлов.
Теоретические основы по работе преобразователей частоты были изложены еще в 30-х годах 20 столетия, но на тот период из-за отсутствия транзисторов и микропроцессоров практическая их реализация была невозможной. Только, когда в США, Европе и Японии были разработаны недостающие компоненты, начали появляться первые вариации частотных преобразователей. С тех пор они претерпели существенных технологических изменений, но принцип их работы до сих пор строится на одних и тех же физических законах.
Только, когда в США, Европе и Японии были разработаны недостающие компоненты, начали появляться первые вариации частотных преобразователей. С тех пор они претерпели существенных технологических изменений, но принцип их работы до сих пор строится на одних и тех же физических законах.
Работа преобразователей частоты строится на следующей формуле:
Из данного выражения сразу становится ясно, что при изменении частоты входного напряжения, которое в формуле обозначено, как f1, будет меняться и угловая скорость магнитного поля статора, которая определяет и скорость вращения самого статора. Такой эффект может быть достигнут только в случае, если величина p (количество пар полюсов) будет оставаться неизменной.
Что же это дает нам? Во-первых, возможность плавного регулирования скорости вращения. Особенно актуально это на пиковых нагрузках при запуске. Во-вторых, такая зависимость позволяет повысить скольжение двигателя асинхронного типа, увеличив его КПД.
Стоит также отметить, что такие характеристики, как коэффициент мощности, КПД, коэффициент перегрузочной способности принимают высокие значения именно при одновременном регулировании частоты и напряжения тока. Закономерности изменения этих параметров напрямую зависят от нагрузочного момента, который может принимать следующий характер:
- Постоянный. При таком характере нагрузочного момента напряжение на статоре будет прямо пропорционально зависеть от частоты:
- Вентиляторный. В данном случае напряжение будет пропорционально частоте в квадрате:
- Обратно пропорциональный. В данном случае формула будет иметь следующий вид:
Вышеописанные выкладки подтверждают, что при одновременной регулировке частоты и напряжения с помощью частотного преобразователя можно обеспечить плавное и равномерное изменение скорости вращения вала.
Если рассматривать общую конструкцию преобразователей частоты, то в ней стоит выделить два основных блока компонентов:
- Управления.

- Электропреобразований.

Первый блок обычно представлен микропроцессором, который воспринимает команды от внешних систем управления и интерфейсов и передает непосредственно на электропреобразовательные элементы.
Блок электропреобразований является основным рабочим механизмом всей системы. Именно он отвечает за прием входного тока и преобразование его параметров до нужных значений, установленных оператором через управляющий блок. В состав данного блока входят следующие элементы:
- Выпрямитель.
- Промежуточная цепь.
- Инвертор.
Поговорим о каждом более подробно.
Данный компонент предназначен для формирования пульсирующего напряжения в одно- или трехфазных сетях переменного тока. Выпрямители обычно строятся либо на диодах, либо на тиристорах. В первом случае они считаются неуправляемыми, а во втором управляемыми.
- Неуправляемые выпрямители. В их конструкции используется две группы диодов, которые подсоединены к различным клеммам и проводят различные напряжения – положительное и отрицательное. В конечном счете выходное напряжение равняется разности напряжений на этих группах диодов и в математическом выражении имеет следующее значение: 1,35*входное напряжение сети.
- Управляемые выпрямители. В конструкции таких выпрямителей вместо диодов используются тиристоры. На них может подаваться входящий сигнал a, который стимулирует задержку тока, выражаемую в градусах. В случаях, когда значение данного параметра колеблется в пределах 0-90 градусов, тиристоры играют роль выпрямителей, а когда в 90-300 градусов – инвертора. Выходное значение постоянного напряжения составляет: 1,35* входное напряжение сети*cos α.
 В конечном счете выходное напряжение равняется разности напряжений на этих группах диодов и в математическом выражении имеет следующее значение: 1,35*входное напряжение сети.
В конечном счете выходное напряжение равняется разности напряжений на этих группах диодов и в математическом выражении имеет следующее значение: 1,35*входное напряжение сети.Промежуточная цепь выполняет роль своеобразного хранилища, из которого электродвигатель получает энергию через инвертор. В зависимости от комбинации инвертора и выпрямителя промежуточная цепь может иметь одну из следующих формаций:
- Инвертор-источник питания. В данном случае промежуточная цепь имеет в составе мощную индуктивную катушку, которая преобразует напряжение выпрямителя в изменяющийся постоянный ток. Само напряжение двигателя определяется по нагрузке. Такой тип цепей может работать только с управляемыми выпрямителями.
- Инверторы — источники напряжения. В данном случае в промежуточной цепи используется фильтр, в состав которого входит конденсатор. Он сглаживает напряжение, поступающее от выпрямителя. Такие цепи способны работать с любыми типами выпрямителей.
- Цепь изменяющегося постоянного напряжения. В данном случае перед фильтром устанавливается прерыватель, в котором имеется транзисторы, выключающий и включающий подачу напряжения от выпрямителя. В данном случае фильтр обеспечивает сглаживает прямоугольные напряжения после прерывателя, а также поддерживает постоянное напряжение на заданной частоте.
 Само напряжение двигателя определяется по нагрузке. Такой тип цепей может работать только с управляемыми выпрямителями.
Само напряжение двигателя определяется по нагрузке. Такой тип цепей может работать только с управляемыми выпрямителями.Инвертор является последним звеном в частотном преобразователе перед самим электродвигателем. Именно он окончательно преобразует напряжение в нужный для работы вид. Вследствие вышеописанных преобразований, происходящих на выпрямителе и промежуточной цепи, инвертор получает:
- Постоянный ток изменяющегося характера.
- Изменяющееся или неизменное напряжение постоянного тока.
Собственно, сам инвертор и обеспечивает подачу напряжения необходимой частоты. Если на него поступает изменяемое напряжение или ток, то он создает только нужную частоту. Если же неизменяемое, то он создают и нужную частоту, и нужное напряжение.
Обычно в конструкции инверторов используются высокочастотные транзисторы, частота коммутации которых находится в диапазоне от 300 до 20 кГц.
Существует два основным метода управления электродвигателями с использованием частотных преобразователей:
- Скалярный.
- Векторный.
Асинхронные системы управления на сегодняшний день считаются самыми распространенными. Они используются в приводах вентиляторов, насосов, компрессоров и т.д. Главный принцип, который лежит в основе скалярного управления, состоит в изменении частоты и амплитуды напряжения по закону U/fn = const, где n всегда больше 1. Соответственно, меняя напряжение U, мы изменяем и частоту f в степени n.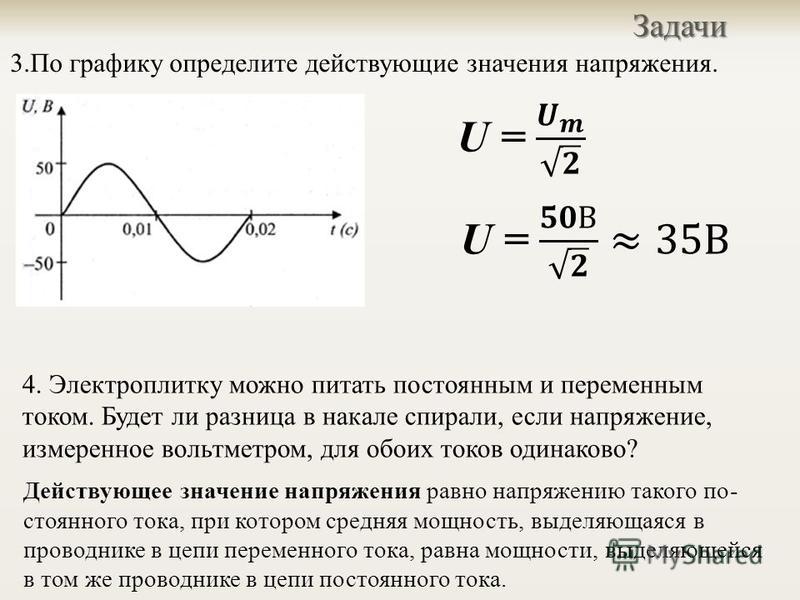 При этом степенное значение определяется в зависимости от особенностей самого частотного преобразователя и его назначения.
При этом степенное значение определяется в зависимости от особенностей самого частотного преобразователя и его назначения.
Сама методика скалярного управления достаточно проста с точки зрения ее технической реализации, но при этом имеет два существенных недостатка. Первый заключается в том, что без дополнительного датчика скорости вы не сможете регулировать скорость вала, ведь она напрямую зависит от нагрузки. Данную проблему можно решить простым приобретение датчика.
Но существует еще один недостаток – невозможность регулировки момента. Казалось бы, данная проблема тоже решается покупкой датчика момента. Но он достаточно дорог, да и само управление получится весьма спорным. К тому же, совместно управлять и скоростью и моментом при скалярном типе управления невозможно.
Векторный тип управления подразумевает, что в саму систему закладывается математическая модель работы электродвигателя, что позволяет на программном уровне по входным параметрам рассчитывать и скорость, и момент. При этом обязательно только наличие датчика, который будет снимать показатели тока фаз статора.
При этом обязательно только наличие датчика, который будет снимать показатели тока фаз статора.
Существует два класса векторных систем управления:
- Без датчиков скорости.
- С датчиками скорости.
Их использование в тех или иных случаях определяется в зависимости от условий эксплуатации двигателя. Если диапазон изменения скорости вращения вала не превышает 1:100, а требования по точности не более 0,5%, то отлично подойдет система без датчиков.
Если же диапазон изменения скорости составляет 1:1000, а требования по точности установлены на уровне до 0,02%, то лучше использовать системы управления с датчиками.
Стоит отметить, что у векторного управления также есть свои недостатки. Например, для их настройки требуются большие вычислительные мощности и знание рабочих параметров двигателей. Кроме того, векторное управление не может использоваться там, где в преобразователю частот подключено сразу несколько рабочих агрегатов – там целесообразно применять скалярные системы.
В конструкции большинства современных частотных преобразователей имеется целый набор различных интерфейсов, через которые можно осуществлять подключение стороннего оборудования или синхронизировать несколько частотников. Рассмотрим основные входы и выходы, используемые в подобных устройствах:
- Аналоговый вход. Данный интерфейс служит для приема стандартного аналогового сигнала производственного диапазона, который располагается в пределах от 0(4) до 20мА или от 0 до 10В. Через него можно осуществлять регулировку работы частотного преобразователя. Например, минимальная величина аналогового сигнала может сигнализировать устройству о том, что выходная частота, поступающая на двигатель, должна иметь свое минимальное значение и наоборот – максимальная должна соответствовать максимальной.
- Аналоговый выход. Данный выход по своему функционалу аналогичен входу. Только в этом случае он передает информацию о частоте, поступающей на двигатель, через аналоговый сигнал определенной величины, что позволяет контролировать режим работы.
- Дискретный вход. Данный вход способен принимать скачкообразные сигналы. Как и аналоговый вход, он способен изменять параметры. Например, минимальный сигнал может соответствовать мгновенной минимальной выходной частоте преобразователи, а максимальный – максимальной выходной частоте.
- Дискретный выход. Данный выход позволяет выполнять аналогичные входу операции только в обратном порядке.
- RS-485. Данный интерфейс является полноценным входом, который позволяет в полной мере взаимодействовать с преобразователем частот, например, через компьютер. С его использованием можно настраивать рабочие параметры оборудования, отслеживать его состояние и т.д. В интерфейсе RS-485 используется особенный дифференциальный сигнал, который позволяет проводить линии длиной до 120 метров. Таким образом, можно установить преобразователь частот на производственном участке, а управление им осуществлять в командной рубке, удаленной от рабочего пространства.
Кроме того, в частотных преобразователях могут использоваться и другие интерфейсы. Все зависит от конкретной модели устройства и его производителя.
Все зависит от конкретной модели устройства и его производителя.
Собственно, как и любые технические средства, используемые на производственных предприятиях и в оборудовании, частотные преобразователи и требования к ним регламентируются определенной технической базой, а именно следующими документами:
- Правила устройства электроустановок 7-е издание.
- ГОСТ 24607-88 Преобразователи частоты.
- ГОСТ 13109-97 Совместимость технических средств электромагнитная.
- ГОСТ Р 51137-98 Электроприводы регулируемые асинхронные.
- ФЗ 261 Федеральный закон об энергосбережении и энергоэффективности.
- ТР ТС 00_2011 Электромагнитная совместимость технических средств.
- ГОСТ26284-84 — Преобразователи электроэнергии полупроводниковые. Условные обозначения.
- ГОСТ23414-84 — Преобразователи электроэнергии полупроводниковые. Термины и определения.
- ГОСТ 4.139-85 Система показателей качества продукции. Преобразователи электроэнергии полупроводниковые. Номенклатура показателей.
 Номенклатура показателей.
Номенклатура показателей.В соответствии с описанными в этих документах требованиями должен осуществлять выбор конкретной модели устройства, а также ее установка и отладка.
Частотные преобразователи нашли широкое применение в самых различных производственных нишах и оборудовании. Столь высокий спрос на подобные устройства обусловлен следующими преимуществами их использования:
- Уменьшение тока запуска. В случае запуска электродвигателя с помощью прямых пускателей наблюдается резкое увеличение тока, значения которого превышают номинальное в 7-15 раз. Это негативно сказывается на электропривод и может привести к пробою изоляции, выгоранию контактов и ряду других негативных последствий. Кроме того, такой способ запуска оказывает влияние и на механические компоненты системы. В момент пуска рабочие узлы двигателя подвергаются высоким нагрузкам, что приводит к их более быстрому износу. Благодаря частотным преобразователям можно существенно снизить пусковые нагрузки на электродвигатель, продлив срок его безремонтной эксплуатации.
- Экономичность. Как правило, двигатели, поддерживающие работу вентиляционных и насосных систем, всегда работают на одной и той же частоте, а регулировка давления и других рабочих показателей осуществляется с помощью арматуры (шиберы, заслонки и т.д.). Это приводит к нерациональному расходованию электроэнергии. В случае использования преобразователей частот можно осуществлять настройку рабочих параметров системы за счет корректировки интенсивности работы двигателя. Это дает возможность более рационально расходовать его ресурсы.
- Повышенная адаптивность. При использовании частотных преобразователей можно конструировать автоматизированные системы, которые по установленным алгоритмам будут корректировать работу оборудования. Это снижает трудозатраты производственных процессов и позволяет сделать их более точными за счет исключения человеческого фактора.
- Ремонтопригодность. В случае поломки преобразователя частот вы можете отдать его в мастерскую, где мастер заменит вышедшие из строя детали. Правда, это касается только электропреобразующего блока – с блоками управления все намного сложнее и они более требовательны с точки зрения восстановления.
 Правда, это касается только электропреобразующего блока – с блоками управления все намного сложнее и они более требовательны с точки зрения восстановления.
Правда, это касается только электропреобразующего блока – с блоками управления все намного сложнее и они более требовательны с точки зрения восстановления.Частотные преобразователи являются оптимальным решением для организации самых различных производственных процессов и отладки рабочего оборудования, на базе которого используются электромоторы.
Частотные преобразователи также имеют и свои недостатки. К ним следует отнести:
- Дороговизна. Частотные преобразователи являются самым дорогим преобразовательным оборудованием. Правда, данный недостаток весьма относителен с учетом того, что такие устройства позволяют продлить срок эксплуатации электродвигателей, а также увеличить срок их безремонтной эксплуатации.
- Ограниченность. Далеко не все старые электродвигатели способны работать в связке с частотным преобразователем. Даже, если это возможно с технической точки зрения, то эксплуатационного ресурса устаревших моделей может просто не хватить на постоянные скачки частоты и скорости вращения вала.
- Сложность настройки и подключения. Преобразователь частот достаточно сложно установить самостоятельно, поэтому для выполнения подобных работ часто приходится привлекать сторонних специалистов, а это в свою очередь влечет определенные финансовые затраты.

Если сопоставить недостатки и преимущества частотных преобразователей, то они, все равно, выглядят более эффективными даже на фоне других преобразовательных устройств. Именно это и делает их особенно популярными в производственных отраслях, где они используются практически повсеместно.
Частотные преобразователи уже много лет используются в строительстве электромеханических устройств и агрегатов. Они позволяют модулировать частоту тока, что в свою очередь делает возможной точную регулировку скорости вращения двигателя. На сегодняшний день частотники используются во многих отраслях деятельности. Мы рассмотрим лишь некоторые из них:
- Пищевая промышленность. Частотные преобразователи часто используются для регулировки работы фасовочных линий. Они позволяют настроить скорость подачи продукта и движения ленты в соответствии с пропускной способностью самого упаковочного станка. Кроме того, их часто используют в крупных миксерных агрегатах, вентиляционных системах и т.д.
- Механизация производственного оборудования. Без преобразователей частоты не обходятся конвейерные ленты, покрасочные и моющие станки, прессы, штамповочное оборудование и т.д. Такие устройства позволяют контролировать скорость рабочих процессов, снижая вероятность повреждения продукции и повышая качество конечного результата.
- Медицина. Относительно любого медицинского оборудования всегда устанавливаются самые высокие технические требования, добиться соответствия которым невозможно без использования управляемых электродвигателей в связке с частотником. Они устанавливаются в различных системах жизнеобеспечения, подъемных механизмах кроватей и т.д.
- Подъемно-транспортное обеспечение. Лифты, подъемные краны, подъемники – все эти средства уже давно используют преобразователи частоты. Они позволяют точно контролировать скорость выполнения различных операций, а также продлевать срок безремонтной эксплуатации оборудования.
 Они позволяют настроить скорость подачи продукта и движения ленты в соответствии с пропускной способностью самого упаковочного станка. Кроме того, их часто используют в крупных миксерных агрегатах, вентиляционных системах и т.д.
Они позволяют настроить скорость подачи продукта и движения ленты в соответствии с пропускной способностью самого упаковочного станка. Кроме того, их часто используют в крупных миксерных агрегатах, вентиляционных системах и т.д. Они позволяют точно контролировать скорость выполнения различных операций, а также продлевать срок безремонтной эксплуатации оборудования.
Они позволяют точно контролировать скорость выполнения различных операций, а также продлевать срок безремонтной эксплуатации оборудования.Перечислять области применения частотных преобразователей можно бесконечно, ведь их можно использовать в любом оборудовании, использующем электродвигатели.
Следует выделить несколько основных параметров, на которые нужно обращать внимание при выборе частотного преобразователя:
- Мощность. Данный параметр частотного преобразователя должен соответствовать мощности двигателя, с которым он будет использоваться. Следует выбирать устройство, мощность которого будет соответствовать номинальному току. Покупать частотный преобразователь с очень завышенными характеристиками попросту бессмысленно, ведь он обойдется намного дороже, да и с наладкой могут возникнуть проблемы.
- Тип нагрузки. Тут все зависит от того, как осуществляется работа агрегата, к которому будет подключен частотный преобразователь. Например, при вентиляторных нагрузках не бывает перегрузок, а в случае с работой пресса – ток может превышать номинальные значения на 60 и более процентов. Соответственно, необходимо учитывать это при выборе и оставлять определенный запас «хода».
- Тип охлаждения двигателя. Двигатели могут оснащаться принудительными системами охлаждения либо иметь самообдув. Во втором случае к крыльчатке ротора прикрепляются специальные лопасти, которые вращаются вместе с ним и обдувают двигатель. Соответственно, нормальная степень обдува в данном случае напрямую зависит от частоты вращения. Если двигатель продолжительное время будет работать на пониженной частоте, то это может привести к перегреву. Соответственно, лучше позаботиться о дополнительном охлаждении, если изменение частоты будет больше 10% от номинального значения.
- Входное напряжение. Данный показатель определяет, при каком напряжении способен работать преобразователь частот. Тут мало знать, что в сети напряжение обычно составляет около 380 В. Часто происходят скачки в диапазоне +-30%. Кроме того, в сетях, куда подключено большое количество силового оборудования, часто случаются выбросы в 1 кВ. Соответственно, чем шире диапазон рабочих напряжений у преобразователя частот, тем надежнее он будет работать.
- Способ торможения. Остановка двигателя может осуществляться либо инверторным мостом, либо электродинамическим способом. Первый метод больше подходит для точного и быстрого торможения, а второй – в механизмах с частым торможением либо при необходимости постепенной остановки. На это обязательно следует обратить внимание.
- Окружающая среда и защита. Обычно в паспорте преобразователя частоты указаны условия, при которых должно использоваться устройство. Например, влагозащищенные модели соответствуют стандарту IP 54 – они устойчивы к воздействию влаги и могут использоваться в помещениях с паровыми испарениями и повышенной влажностью.
- Тип управления и интерфейсы. Обязательно необходимо обратить внимание на наличие подходящих для подключения разъемов, а также возможностей правления – некоторые модели предназначены для монтажа на месте, а другие – в отдельной рубке управления.
 Соответственно, необходимо учитывать это при выборе и оставлять определенный запас «хода».
Соответственно, необходимо учитывать это при выборе и оставлять определенный запас «хода». Соответственно, чем шире диапазон рабочих напряжений у преобразователя частот, тем надежнее он будет работать.
Соответственно, чем шире диапазон рабочих напряжений у преобразователя частот, тем надежнее он будет работать.
Если вы никогда не работали с преобразователями частоты, лучше обратиться за консультацией к специалисту.
Если рассмотреть монтаж преобразователя частоты схематически, то вес процесс сводиться к соединению контактов самого устройства, электродвигателя и управляющего блока-предохранителя. Достаточно соединить провода всех элементом, подключить двигатель к сети и запустить его.
На первый взгляд, ничего сложного в этом нет, но, на самом деле, процедура монтажа имеет некоторые свои нюансы:
- Очень важно, чтобы в цепи между самим частотником и источником питания был установлен предохранитель. Он позволит своевременно отключать устройства в случае перепадов напряжения, сохраняя их работоспособность. Примечательно, что при подключении к трехфазной сети, необходимо, чтобы сам предохранитель также был трехфазным, но имел общий рычаг для отключения. Это даст возможность отключать питание сразу на всех фазах даже, если только на одной случилось короткое замыкание или перегрузка. Если преобразователь подключается к однофазной сети, то и предохранитель должен быть однофазным. В данном случае при расчетах необходимо учитывать ток только одной фазы, но умноженный на 3. Всегда стоит помнить, что в инструкции практически к любому преобразователю указаны требования и нормы по его установке. С ними необходимо ознакомиться еще до начала работ.
- Фазовые выходы частотного преобразователя подключаются к контактам самого электродвигателя. При этом в зависимости от напряжения частотника обмотки двигателя могут иметь формацию «звезда» или «треугольник». Обычно на корпусе двигателя указано два значения напряжения. Если частотник соответствует меньшему, то обмотки соединяются «звездой», если большему – «треугольником». Вся эта информация обычно пропечатывается в инструкции.
- В комплекте практически с каждым преобразователем частоты прилагается выносной пульт управления. Он не является обязательным элементов цепи, ведь на самом устройстве также есть свои элементы управления, но позволяют существенно упростить работу с оборудованием. Пульт можно монтировать на любом расстоянии от частотника. Обычно делается это следующим образом: преобразователи частоты, которые имеют низкую степень защиты располагаются подальше от двигателя, а сам пульт выносится непосредственно к рабочему месту около оборудования.
 Если преобразователь подключается к однофазной сети, то и предохранитель должен быть однофазным. В данном случае при расчетах необходимо учитывать ток только одной фазы, но умноженный на 3. Всегда стоит помнить, что в инструкции практически к любому преобразователю указаны требования и нормы по его установке. С ними необходимо ознакомиться еще до начала работ.
Если преобразователь подключается к однофазной сети, то и предохранитель должен быть однофазным. В данном случае при расчетах необходимо учитывать ток только одной фазы, но умноженный на 3. Всегда стоит помнить, что в инструкции практически к любому преобразователю указаны требования и нормы по его установке. С ними необходимо ознакомиться еще до начала работ. Пульт можно монтировать на любом расстоянии от частотника. Обычно делается это следующим образом: преобразователи частоты, которые имеют низкую степень защиты располагаются подальше от двигателя, а сам пульт выносится непосредственно к рабочему месту около оборудования.
Пульт можно монтировать на любом расстоянии от частотника. Обычно делается это следующим образом: преобразователи частоты, которые имеют низкую степень защиты располагаются подальше от двигателя, а сам пульт выносится непосредственно к рабочему месту около оборудования.Не менее важным этапом установки частотного преобразователя является его тестовый запуск. Он осуществляет по следующей схеме:
- После подключения всех элементов системы (предохранитель, панель управления, частотник, двигатель) необходимо перевести рукоять на пульте управления в активное положение на несколько градусов.
- Тумблеры предохранителя переключить в положение «ВКЛ». После этого на частотном преобразователи должны загореться световые индикаторы, которые будут сигнализировать, что оборудование подключено правильно, а двигатель должен начать медленно вращаться.
- Если вал двигателя начал вращаться в другу от нужной сторону, необходимо перепрограммировать сам частотный преобразователь на реверсное движение. Практически все современные устройства поддерживают такую функцию.
- Постепенно передвигайте рукоять управления и следите за работой двигателя – частота вращения вала должна расти по мере того, как вы передвигаете рукоять.
 Практически все современные устройства поддерживают такую функцию.
Практически все современные устройства поддерживают такую функцию.Если при тестовом запуске никаких проблем обнаружено не было, значит, вы сделали все правильно и система может включаться в рабочий процесс.
Следует выделить несколько основных правил безопасности, о которых нужно помнить при выполнении работ по подключению частотных преобразователей:
- Категорически запрещается касаться любой частью тела к токоведущим элементам цепи. Это может нанести ущерб вашему здоровью или даже лишить жизни. Перед началом работ рекомендуется полностью обесточить оборудование и использовать специальные электромонтажные инструменты с защитой от ударов током.
- Стоит помнить, что даже после угасания индикаторов на устройстве в цепи может оставаться напряжение. Чтобы избежать ударов током при работе с системами до 7 кВт необходимо выждать 5 минут до начала работ, с агрегатами свыше 7 кВт – 15 минут. Этого времени должно хватить, чтобы все конденсаторы в цепи разрядились.
- Заземление является неотъемлемой частью любой электрической цепи, включая цепь частотный преобразователь-двигатель. Оно должно устанавливаться в виде отдельного кабеля и ни в коем случае не может присоединяться к нулевой шине.
- Стоит помнить, что отключения частотного преобразователя не гарантирует, что в других узлах сети не осталось напряжения, поэтому перед ремонтом или обслуживанием необходимо полностью отключить цепь от сети.
 Этого времени должно хватить, чтобы все конденсаторы в цепи разрядились.
Этого времени должно хватить, чтобы все конденсаторы в цепи разрядились.Выполнять работы по подключению преобразователей частоты могут только квалифицированные специалисты, имеющие соответствующую подготовку, а также необходимые допуски.
Рекомендации по покупке частотных преобразователей
Покупка частотного преобразователя является достаточно ответственным делом, ведь подобные устройства стоят достаточно дорого и на них возлагаются очень серьезные задачи, поэтому некорректность работы оборудования может привести не только к финансовым потерям, но и остановке всего производства или других работ.
Перед тем как покупать преобразователь частот, необходимо:
- Определиться с параметрами, которые будут соответствовать вашему электродвигателю.
- Составить рабочую схему, по которой будет осуществляться монтаж и подключение оборудования.
- Выбрать дополнительные модели, которые будут подключаться к самому преобразователю.
- Закупить все необходимые кабеля, крепления и каркасы, необходимые для установки.
- Подготовить рабочую площадку для монтажа. Возможно, нужно будет оборудовать дополнительные источники питания или реорганизовать производственное оборудование для возможности его подключения к преобразователю.
Многие в связи с дороговизной преобразователей частот покупают б/у устройства. Такой подход более рискованный, чем покупка новой продукции, но позволяет сэкономить некоторую сумму денег. Если вы также решили купить бывший в употреблении преобразователь, то стоит его тщательно проверять не только по внешним признакам, но и в работе. Лучше всего, если продавец не будет демонтировать его со своего объекта и сможет продемонстрировать его работоспособность на практике.
Лучше всего, если продавец не будет демонтировать его со своего объекта и сможет продемонстрировать его работоспособность на практике.
Опять же, если вы никогда не сталкивались с покупкой преобразователя частоты, лучше поручить это дело профессионалу, который сможет подобрать для вас подходящую модель и помочь с ее установкой.
Устройство и принцип работы преобразователя частоты
7408
Преобразователи частоты (ПЧ, частотники, частотные преобразователи), которые сейчас используются с асинхронными двигателями, как правило, строятся по схеме двойного преобразования электроэнергии. Первое преобразование осуществляется выпрямителем, второе инвертором.
Основные составные части ПЧ: выпрямитель, звено постоянного тока, инвертор
Рис. 1. Принципиальная схема ПЧ
Выпрямитель строится на выпрямительных диодах либо, что бывает реже, по диодно-тиристорной схеме. Остановимся на самом простом – диодном выпрямлении.
Трехфазное сетевое напряжение с частотой 50 Гц и напряжением 380 В поступает на вход выпрямителя. После выпрямления мы получаем пульсирующее напряжение, оно уже имеет определенного рода пульсации, но постоянным еще не является. Постоянным напряжение становится после попадания на звено постоянного тока и сглаживания пульсаций. Между выпрямителем и звеном постоянного тока расположен так называемый резистор предзаряда.
Резистор предзаряда ограничивает ток заряда конденсаторов в первый момент времени, таким образом предохраняя диоды выпрямителя и сеть от большого броска тока. По мере заряда конденсатора этот резистор отключается и в дальнейшей работе участия не принимает.
Звено постоянного тока представляет собой, как правило, набор конденсаторов довольно большой емкости. Задача этого элемента максимально сгладить пульсации напряжения, привести его к постоянному значению. В нормальной ситуации, когда сетевое переменное напряжение 380 В, значение на звене выпрямленного постоянного тока составляет 540 В. Если сетевое напряжение больше или меньше, то величина выпрямленного напряжения пропорционально увеличивается или уменьшается.
Если сетевое напряжение больше или меньше, то величина выпрямленного напряжения пропорционально увеличивается или уменьшается.
Структура и особенности работы инвентора
После выпрямителя напряжение поступает на инвертор. Инвертор является самой сложной и важной частью преобразователя частоты. С выхода инвертора сигнал поступает уже непосредственно на электродвигатель. Форма напряжения на выходе инвертора представляет собой набор прямоугольных импульсов разной ширины и определенной длительности. Так строится силовая часть преобразователя частоты.
Схема прибора включает в себя также слаботочные цепи, которые помогают взаимодействию всех основных частей ПЧ. В частности, есть центральный процессор, который является, по сути, мозгом преобразователя, управляет как работой инвертора, так и других частей устройства. Информацию о выходном токе процессор получает от датчиков тока, расположенных на выходных цепях ПЧ. Сигнал с датчиков тока обрабатывается, и процессор далее формирует управляющий алгоритм, чтобы преобразователь мог функционировать в заданных пользователем условиях. Также еще есть источник питания собственных нужд, он питает как процессорную часть, так и часть, отвечающую за измерения выходного тока и измерение напряжения на звене постоянного тока. Помимо этого, есть блок драйверных микросхем, которые в свою очередь управляют транзисторами инверторной части, и еще ряд вспомогательных элементов.
Также еще есть источник питания собственных нужд, он питает как процессорную часть, так и часть, отвечающую за измерения выходного тока и измерение напряжения на звене постоянного тока. Помимо этого, есть блок драйверных микросхем, которые в свою очередь управляют транзисторами инверторной части, и еще ряд вспомогательных элементов.
Рис. 2. Принципиальная схема инвертора
Рассмотрим принципиальное устройство инверторной части. Основными элементами силовой части инвертора являются IGBT-транзисторы – мощные, специально спроектированные для работы в ключевом режиме. Это гибрид полевого и биполярного транзисторов. Управляющая часть представляет собой изолированный затвор (как у полевого), а силовая часть повторяет устройство биполярного, у которого имеется коллектор–эмиттер.
Силовые элементы выпускаются в виде сдвоенного модуля, состоящего из двух силовых транзисторов, включенных последовательно. Каждый из транзисторов шунтируется диодом в обратном направлении. Поскольку на выходе должно быть 3 фазы, в конструкции инвертора имеется 3 плеча (см. рис 2).
Поскольку на выходе должно быть 3 фазы, в конструкции инвертора имеется 3 плеча (см. рис 2).
Рис. 3. Эквивалентная схема работы транзисторов
Чтобы лучше понять принцип работы, рассмотрим эквивалентную схему, где каждый транзистор заменен обычным выключателем. На схеме (рис. 3) условными обозначениями показаны 6 выключателей (транзисторов) и электродвигатель.
Изучим, как формируются выходные токи в обмотках двигателя. За управление транзисторами (переключателями на схеме) отвечает центральный процессор. Он переключает их строго по определенной программе, которая задается изначально алгоритмом его действия.
На схеме показано срабатывание ключей № 1, № 4, № 6. Обратите внимание, категорически не допускается ситуация, когда в одном плече замкнут и верхний ключ, и нижний – это короткое замыкание и отказ изделия. В ситуации, показанной на схеме, ток протекает через открытый ключ № 1, далее заходит в обмотку А электродвигателя, выходит из обмоток B и C, и через открытые нижние ключи №4 и № 6 уходит в минусовое звено.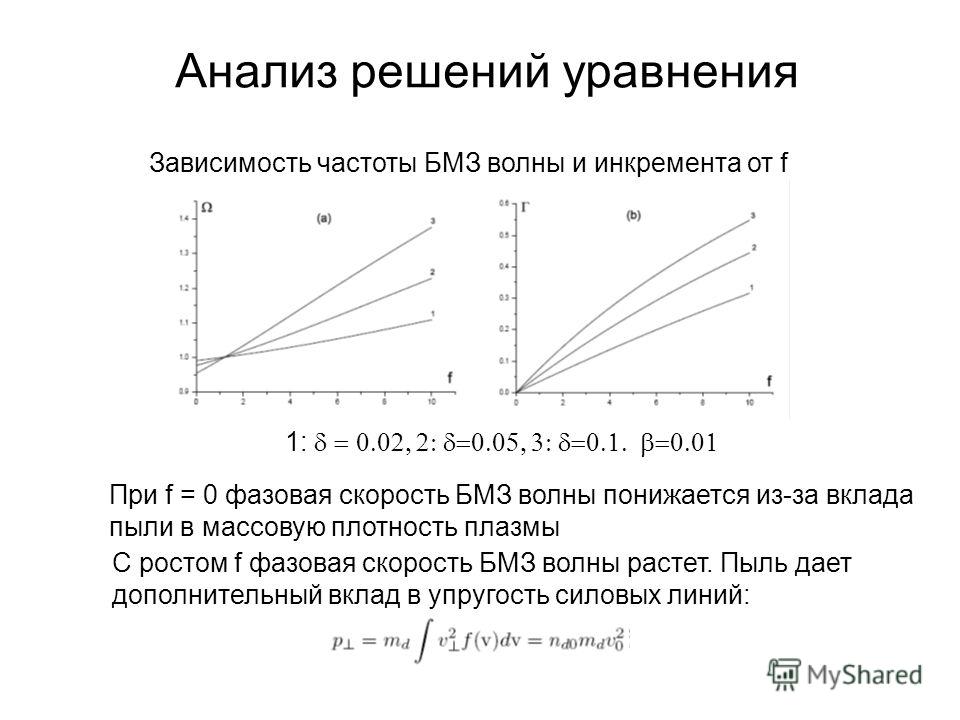
Для того чтобы поменять ток в обмотке C, нужно переключить ключи среднего плеча. Ток по-прежнему будет протекать через открытый ключ № 1, а уходить через обмотку B и ключ №6 в минусовое плечо. При этом, одновременно, через замкнутый ключ № 3 и втекающий ток через обмотку C уходит в минус. Меняя положение открытых и закрытых ключей можно менять ток в обмотках двигателя. Если это делать по определенной программе, то получится изменяемый ток, как при работе двигателя от сети, то есть будет происходить плавное перетекание одной фазы в другую.
Рис. 4. Протекание тока в инверторе
Теперь вместо упрощенной схемы с выключателями рассмотрим, как протекает ток в цепи транзисторов на примере реального инвертора (рис. 4). По своей сути этот процесс ничем не отличается от рассмотренного ранее ключевого режима, за исключением того, что мы имеем дело с реальным двигателем, который, в принципе, является индуктивной нагрузкой.
В момент закрытия ключа индуктивность двигателя не позволит току мгновенно прекратиться за счет явления самоиндукции. Этот остаточный ток гасится обратными диодами, которые подключены к закрытым транзисторам (см. рис. 4), т.е. в момент выключения (закрывания) транзисторов остаточный ток протекает через обратные диоды, таким образом предотвращаются выбросы напряжения на ключе.
Этот остаточный ток гасится обратными диодами, которые подключены к закрытым транзисторам (см. рис. 4), т.е. в момент выключения (закрывания) транзисторов остаточный ток протекает через обратные диоды, таким образом предотвращаются выбросы напряжения на ключе.
Но поскольку транзистор работает как ключ, он может выдать либо полное напряжение на двигатель, либо не выдать вообще. На практике же нужно получить некое плавное напряжение синусоидальной формы, причем изменяемое как по величине, так и по частоте, для того чтобы иметь возможность управлять скоростью вращения асинхронного двигателя.
Алгоритм работы ШИМ
Далее рассмотрим, как формируется выходное напряжение методом широтно-импульсной модуляции (ШИМ). Для примера возьмем некую гидравлическую модель, которая нам поможет понять, что происходит.
Рис. 5. Гидравлическая модель
Представим себе, что имеется ряд емкостей сосудов. В нижней части у каждого есть отверстия. С помощью некого устройства, которое выдает капельки воды определенных размеров с неизменной частотой, начинаем наполнять эти сосуды. Понятно, что там, где размер капель небольшой, уровень жидкости установится на низком уровне, а чем больше размер капель, тем более высокий уровень будет иметь жидкость в сосуде. Подобрав определенным образом размер капель, можно получить огибающую этих уровней (см. рис. 5). Таким образом получилось изобразить статическую картину, которая дает понимание процесса, как можно из дискретных частей сделать некое подобие аналоговых.
С помощью некого устройства, которое выдает капельки воды определенных размеров с неизменной частотой, начинаем наполнять эти сосуды. Понятно, что там, где размер капель небольшой, уровень жидкости установится на низком уровне, а чем больше размер капель, тем более высокий уровень будет иметь жидкость в сосуде. Подобрав определенным образом размер капель, можно получить огибающую этих уровней (см. рис. 5). Таким образом получилось изобразить статическую картину, которая дает понимание процесса, как можно из дискретных частей сделать некое подобие аналоговых.
Теперь перейдем к работе в динамике. Представим, что сосуд один, но меняем размер капель, которыми он заполняется. В нижней части рис. 5 показан процесс в этот момент времени – по оси x время (t), по оси y напряжение (U) или, по-другому – уровень воды в сосуде. По мере того, как изменяется размер капли, изменяется и средний уровень жидкости, он возрастает, а затем начинает падать. Это уже динамический процесс. Теперь проводим аналогию с электричеством.
Рис 6. Преобразование дискретного сигнала в аналоговый
На рис. 6 наглядно показано, что происходит с дискретным сигналом, если мы будем открывать ключ и закрывать с определенной частотой и на определенное время: чем шире импульс открытия транзистора, тем выше некий средний уровень напряжения (красная огибающая сигнала).
Введем несколько параметров и объясним их.
- Период сигнала ШИМ – это время между импульсами. Параметр строго задан и не меняется (из ранее описанного примера это когда капельки все капают с одинаковой частотой, только разного размера).
- Частота ШИМ-модуляции — обратно пропорциональна длительности периода, это то, что мы имеем как один из параметров при программировании преобразователя частоты. Определяет частоту следования импульсов на выходе каждого из каналов IGBT-модуля.
- Длительность импульса (t-импульса). Определяется уже самим процессором. То есть процессор в зависимости от заданного значения выходного сигнала в данный момент определяет, на какое время нужно открыть каждый ключ. Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.
 Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.
Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.За тем, чтобы двигатель не перегружался, и напряжение, которое подводится к нему на этой частоте, пропорционально уменьшалось или увеличивалось, следит преобразователь частоты. Он сам определяет необходимое время открытия каждого ключа, то есть определяя t-импульс. И такая ситуация происходит одновременно на трех каналах, ведущих на выход преобразователя на электродвигатель.
Из рисунка видно, что чем чаще будут идти импульсы, тем ближе форма напряжения будет к синусоидальной.
Критерии выбора частоты
На практике частота ШИМ может задаваться пользователем, как правило, в пределах от 1 до 15 килогерц. Для того чтобы получить напряжение по форме более-менее близкой к синусоидальной, частота ШИМ должна быть в 20-30 раз больше максимальной выходной частоты, которую вы хотите получить.
Вы можете выбрать частоту ШИМ произвольно под свою конкретную задачу. Есть несколько параметров, которые определяют выбор.
Рис.7. Параметры, влияющие на выбор частоты ШИМ
1. Длина кабеля до двигателя. Чем длиннее кабель, тем меньшую частоту ШИМ можно задать. Например если у вас длина кабеля 100 метров и больше, то частоту ШИМ больше 2,3 килогерц нет смысла ставить, иначе на этой длине будут большие потери и напрасный расход мощности.
2. Акустический шум двигателя. При питании двигателя от преобразователя частоты слышится посторонний шум. Он зависит именно от частоты ШИМ, которую вы задали. Чем она выше, тем выше тон звука. Если задана чистота более 8,10 килогерц, шума практически не слышно. На более низких частотах (1,3,5 килогерц) этот шум значителен и вызывает дискомфорт.
3. Максимальная выходная частота. Большинство двигателей используют максимальную выходную частоту инвертора 50 гц, поэтому здесь частота ШИМ должна быть не менее чем в 20 раз выше. Здесь можно задавать частоту 1, 2, 3, 5 килогерц из всего диапазона.
Здесь можно задавать частоту 1, 2, 3, 5 килогерц из всего диапазона.
Если вы используете высокоскоростной двигатель, например 400-герцевый, то здесь уже частоту ШИМ 1,3,5 килогерц ставить не стоит: на выходе будет не синусоида. Для таких скоростных двигателей частота ШИМ выбирается максимально возможной для данного инвертора, скажем, 15 килогерц.
4. Тепловыделение инверторной части преобразователя. Оно связано с тем, что IGBT-транзисторы, которые формируют выходное напряжение, не идеальны, подвержены разогреву в процессе работы. Для того чтобы эффективно отводить тепло, надо применять соответствующие радиаторы, вентиляторы охлаждения. Чем больше тепловыделение в этой инверторной части, тем более мощные приборы для охлаждения надо использовать.
Потери энергии в частотном преобразователе и способы их снижения
Рассмотрим вопрос тепловыделения в инверторной части преобразователя. Чем определяются потери транзистора?
Рис. 8. Потери энергии
8. Потери энергии
Возьмем условный IGBT-транзистор, который включен в цепь с напряжением 500 вольт, ограничивающий резистор.
Закрытое состояние: на затворе напряжения нет, напряжение на коллекторе равно сетевому напряжению, ток отсутствует, утечки мизерные, тепловыделения никакого нет. Открываем транзистор с помощью напряжения 10 вольт на затворе, это стандартное напряжение практически для всех транзисторных модулей. Транзистор переключается в открытое состояние не мгновенно, у каждого транзистора есть параметр, который называется время включения или время выключения. Типичное значение для самых распространенных транзисторов — 0,2 микросекунды. Время небольшое, но за это время на кристалле транзистора присутствует как напряжение, которое быстро спадает, так и нарастающее значение тока, которое тоже нарастает не мгновенно. В этот момент происходят потери. И чем выше частота ШИМ, про которую мы раньше говорили, чем чаще включается и выключается транзистор, тем больше идет тепловыделения за счет потерь переключений.
Когда транзистор открылся, установился статический режим на какое-то небольшое время, тепловыделение продолжается: оно происходит за счет того, что в момент состояния открытия, напряжение на транзисторе тоже не равно нулю, он определяется потерями на кристалле в открытом состоянии. Типичное его значение 1,5 вольта. Оно может незначительно варьироваться в зависимости от технологии изготовления транзистора и пр.
В этот момент тепловыделение тоже существует, но с потерями в открытом состоянии мы ничего не можем сделать, максимум — применить транзисторы с меньшим напряжением в открытом состоянии. С потерями при переключении мы можем бороться путем уменьшения частоты ШИМ. Это бывает полезно, если преобразователь находится в закрытом шкафу, где он греется больше. Понизив частоту ШИМ, мы можем снизить потери на преобразователе и снизить его температуру.
Общие потери преобразователя частоты в виде тепла составляют около 3%.
Потери на выпрямителе происходят через открытые диоды. Падение напряжения на открытом диоде, а также протекающий через него выпрямленный ток приводят к его нагреву. Звено постоянного тока, состоящее из электролитических конденсаторов большой емкости, тоже нагревается, потому что постоянно происходит процесс заряда и разряда. Также к потерям можно отнести собственные нужды преобразователя частоты: работу вентиляторов охлаждения, электронной схемы, вторичного источника питания и так далее.
Падение напряжения на открытом диоде, а также протекающий через него выпрямленный ток приводят к его нагреву. Звено постоянного тока, состоящее из электролитических конденсаторов большой емкости, тоже нагревается, потому что постоянно происходит процесс заряда и разряда. Также к потерям можно отнести собственные нужды преобразователя частоты: работу вентиляторов охлаждения, электронной схемы, вторичного источника питания и так далее.
Состав типового частотного преобразователя (на примере 75 кВт)
Рис.9. Состав типового преобразователя частоты
Рассмотрим некий преобразователь частоты мощностью 75 кВт с выходным током 150 ампер. В таком преобразователе используются выпрямительные диоды с номинальным током 200 ампер на рабочее напряжение 1600 вольт, их здесь 6 штук. Звено постоянного тока состоит из набора электролитических конденсаторов, они обычно включаются параллельно и последовательно для получения необходимой емкости и рабочего напряжения.
В данном случае суммарная емкость будет равна 6800 микрофарад и рабочее напряжение батареи — 800 вольт. Инверторная часть состоит из IGBT-транзисторов с током в открытом состоянии 300 ампер и рабочим напряжением 1200 вольт. Ниже фотографии некого типичного диодного модуля, он состоит из двух диодов в верхней и нижней части (верхнее и нижнее плечо). И IGBT-транзистор точно также состоит из двух транзисторов, верхнего и нижнего плеча.
В преобразователях малой мощности (до 15, 22 киловатт и меньше) в качестве силового элемента используется матрица IGBT. Выпрямительная часть собрана в виде готового модуля с тремя выводами для подключения переменного напряжения и выходом на плюс-минус звена постоянного тока. Здесь включается резистор предзаряда либо другие элементы между выпрямительной частью и инверторной. Инверторная часть собрана на 6 транзисторах, шунтированных диодами, то есть готовых выходов для подключения на двигатель.
Один из обязательных элементов матрицы IGBT — ключ для управления тормозным резистором. Как правило, матрица IGBT снабжается встроенным терморезистором, который позволяет преобразователю частоты оценивать температуру силовых элементов и соответственно управлять вентиляторами для обдува радиатора.
Как правило, матрица IGBT снабжается встроенным терморезистором, который позволяет преобразователю частоты оценивать температуру силовых элементов и соответственно управлять вентиляторами для обдува радиатора.
AB-029: Вибрационные двигатели – напряжение, частота и амплитуда
Вибрационные двигатели: напряжение, частота и амплитуда
Введение
Нас часто спрашивают, как настроить амплитуду или частоту вибрации наших различных вибрационных двигателей. В этой статье мы рассмотрим, насколько это просто, почему это может быть полезно и как мы можем предсказать поведение двигателя, используя график управляющего напряжения и типичных рабочих характеристик.
Существует два основных типа вибрационных двигателей: эксцентриковые вращающиеся массы (ERM) и линейные резонансные приводы (LRA). Для оптимальной работы LRA требуется очень специфическая резонансная частота и сигнал возбуждения переменного тока, поэтому в этой статье основное внимание будет уделено ERM.
Зачем менять амплитуду вибрации?
Важно понимать, что, хотя мы можем измерять амплитуду вибрации в контролируемой лабораторной среде, реальное восприятие этой вибрации будет варьироваться из-за множества факторов, включая (но не ограничиваясь):
- Жесткость или гибкость устройства
- Ориентация двигателя
- Вес устройства
- Возраст пользователя
- Положение устройства на теле
- Частота вибрации
- Факторы окружающей среды
Применения могут иметь очень разные требования к амплитуде вибрации, небольшое носимое устройство для детей потребует гораздо более низкой интенсивности вибрации, чем промышленный бункер.
Изменение интенсивности вибрации также позволяет реализовать расширенные тактильные эффекты. Это растущая и захватывающая область, поскольку она позволяет различным встроенным технологиям передавать все большее количество информации только с помощью вибрации. Изменяя интенсивность и характер вибрации, можно создать практически безграничное количество комбинаций, ритмов или сообщений. В частности, в носимых и автомобильных областях наблюдается растущее распространение этой технологии.
В частности, в носимых и автомобильных областях наблюдается растущее распространение этой технологии.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и моторы, соответствующие вашим требованиям.
Зачем менять частоту вибрации?
Результаты нашего тестирования тактильной обратной связиВажно отметить, что в ERM амплитуда вибрации и частота вибрации неразрывно связаны. На изображении выше светло-голубая линия представляет измеренную амплитуду вибрации. Величина волны — это амплитуда, а период — это частота колебаний. Обратите внимание, как по мере увеличения амплитуды период сокращается (= увеличивается частота).
Поскольку невозможно изменить одно без изменения другого, наиболее распространенной причиной изменения частоты вибрации является изменение амплитуды. Однако частота вибрации также имеет свои последствия.
Подобно тому, как человеческое ухо воспринимает звуки определенной частоты громче, чем другие, вибрации воспринимаются немного по-разному в зависимости от их частоты. Различные механорецепторы обнаруживают вибрации на разных частотах, например, тельца Пачини лучше всего обнаруживают вибрации в диапазоне от 40 до 800 Гц, а его пиковое восприятие находится в диапазоне от 200 до 300 Гц.
Автомобильная среда имеет много источников вибрации, например, двигатель, дорога, кондиционер и радио могут создавать вибрации в диапазоне частот. Чтобы предотвратить потерю тактильной обратной связи среди этого шума, часто необходимо использовать легко различимые частоты.
Для небольшого подмножества приложений требуется очень специфическая частота, возможно, необходимо вызвать биологический эффект или существуют определенные механические требования. Используя поворотные энкодеры или измерение обратной ЭДС, мы можем разработать алгоритм управления с обратной связью, который поддерживает скорость двигателя, при необходимости регулируя напряжение возбуждения. Это гарантирует, что скорость остается в пределах допуска, более жесткого, чем производственные спецификации.
Это гарантирует, что скорость остается в пределах допуска, более жесткого, чем производственные спецификации.
Другим аспектом, который часто упускают из виду, является смещение, возникающее при вибрации двигателя. Если мы возьмем два двигателя с одинаковой амплитудой вибрации, но с разными частотами вибрации, более медленный двигатель будет производить больший рабочий объем. Это может иметь значительное влияние на восприятие вибрации. Например, мы можем использовать наш Quick Vib Estimator (справа) для расчета смещения от двух двигателей с одинаковой амплитудой, но с очень разными скоростями.
Как Uni Vibe™ 324-102, так и Uni Vibe™ 310-114 имеют типичную нормированную амплитуду 6 Гс, но 324-102 рассчитан на 2800 об/мин, а 310-114 рассчитан на 12000 об/мин. Введя эти данные в оценочное устройство с заданной массой 100 г, мы увидим, что 324-102 создает смещение 0,684 мм, а 310-114 — всего 0,037 мм. Это только теоретические модели, и фактическая разница очень мала, но, если сравнивать, 324-102 создает гораздо больший рабочий объем, который пользователь, вероятно, заметит.
Влияние скорости на амплитуду
В системе вращения зависимость между скоростью двигателя и амплитудой вибрации не линейная, а скорее экспоненциальная, это ясно показано в следующем уравнении. Он описывает силу (центростремительную), создаваемую вращающейся массой:
Здесь m — масса внецентренной нагрузки, r — ее «эксцентриситет», а последний элемент ω (омега) — скорость вращения в радианах в секунду.
Номинальное процентное увеличение скорости двигателя приведет к большему увеличению амплитуды. Теоретически это означает, что мы можем добиться значительных изменений, внося относительно небольшие корректировки в скорость двигателя.
Модификация ERM, в частности его веса или эксцентриситета, является еще одним способом изменения интенсивности вибрации. Однако это, очевидно, гораздо менее гибко, так как устанавливается во время производства и не может быть изменено «на лету».
Связь между скоростью и частотой
Для вибрационных двигателей ERM скорость двигателя и частота вибрации представляют одно и то же.
Скорость двигателя — это просто число оборотов в минуту (об/мин), а частота вибрации выражается в герцах (Гц) и представляет собой количество колебаний в секунду. Чтобы преобразовать из Гц в обороты в минуту, мы просто умножаем на 60, так как в каждой минуте 60 секунд. Точно так же, чтобы преобразовать из RPM в Гц, мы делим на 60.
Как изменить скорость
Для управления скоростью двигателя нам просто нужно отрегулировать управляющее напряжение. Повышенное напряжение означает, что двигатель может выдавать больший крутящий момент, а поскольку нагрузка фиксирована, скорость увеличивается.
Для надежной и стабильной работы двигателя рекомендуемый диапазон управляющего напряжения определяется двумя спецификациями. Минимальное напряжение для запуска двигателя определяется максимальным пусковым напряжением. Использование максимального значения для определения минимального напряжения может показаться странным, но на то есть веская причина. Хотя возможно, что двигатель может работать ниже этого напряжения, это не гарантируется, и работа двигателя может быть менее чем надежной.
Верхним пределом напряжения является максимальное номинальное рабочее напряжение. Важно не допускать превышения максимального номинального рабочего напряжения двигателя, так как это может привести к его повреждению. Лучше не превышать номинальное напряжение в течение длительного периода времени — такие значения, как максимальный рабочий ток, могут быть неточными, если они превышают это значение, а повышенная скорость (и ток) приводит к более быстрому износу щеток и сокращению срока службы двигателя. . Обе эти спецификации и многое другое можно найти в соответствующих технических паспортах продуктов.
В зависимости от вашей схемы и приложения существует множество способов изменить приложенное напряжение, однако наиболее распространенным методом является использование ШИМ-управления. Другие методы включают использование базового линейного делителя напряжения или специальных драйверов двигателей. На самом деле, некоторые драйверы, такие как DRV2605, содержат библиотеки сигналов, например. «щелчки» и «разгоны», которые автоматически регулируют напряжение привода для вас. Интересно, что при использовании аккумулятора в качестве нерегулируемого источника питания вы, как правило, видите снижение напряжения питания по мере разряда аккумулятора, что затем приводит к падению скорости.
«щелчки» и «разгоны», которые автоматически регулируют напряжение привода для вас. Интересно, что при использовании аккумулятора в качестве нерегулируемого источника питания вы, как правило, видите снижение напряжения питания по мере разряда аккумулятора, что затем приводит к падению скорости.
Изменение скорости бесколлекторного вибрационного двигателя постоянного тока зависит от используемого драйвера. Например, 910-101 имеет встроенный драйвер, который принимает переменное напряжение, но не работает с ШИМ. И наоборот, оценочная плата M10-400 использует драйвер DRV11873, который принимает ШИМ-сигнал.
Техника тактильного вождения
Регулировка управляющего напряжения повлияет не только на максимальную скорость двигателя, но и на то, как быстро он ее достигнет. Это входит в мир тактильной обратной связи и специальных методов вождения, разработанных для того, чтобы эффекты вибрации ощущались «четче». Если вы не используете такие эффекты, как «щелчки» или «пульсация» для передачи информации пользователю, вы можете пропустить этот раздел.
Поскольку приложенное напряжение в конечном итоге определяет выходную мощность двигателя, мы знаем, что более высокое напряжение заставит двигатель вращаться с более высокой скоростью. Из этого следует, что более высокое напряжение также заставит двигатель запускаться быстрее, потому что у него больше мощности для преодоления инерции эксцентриковой массы.
Техника «Перегрузки» применяет более высокое напряжение, чем номинальное, чтобы дать двигателю дополнительную мощность и быстрее запуститься, прежде чем быстро упасть до номинального напряжения, чтобы двигатель не был поврежден. Идеальное тактильное устройство не имело бы запаздывания и мгновенно начинало бы вибрировать с желаемой амплитудой (в зависимости от приложенного напряжения).
Вибрация, динамическая реакция двигателя На приведенном выше графике показано, сколько времени требуется двигателю для запуска и остановки. Время запаздывания показывает, как быстро вибрационный двигатель достигает 0,08 G, время нарастания — от пуска до 50% типичной амплитуды для данного напряжения, а время останова — это время, необходимое двигателю для остановки при заданном напряжении.
Когда мы увеличиваем управляющее напряжение, наблюдается явное падение времени запаздывания и нарастания, но аналогично увеличивается время остановки из-за увеличения импульса массы. «Активное торможение» является противоположностью Overdrive, когда полярность управляющего напряжения инвертируется. Это заставляет двигатель двигаться в противоположном направлении, эффективно действуя как «тормоз». Уменьшение времени остановки является важной частью получения четкого тактильного эффекта.
См. дополнительную информацию по его теме в разделе улучшение тактильной производительности нашего контента тактильной обратной связи.
Трудности в прогнозировании амплитуды и частоты вибрации
Как и в большинстве теоретических моделей, могут возникнуть проблемы при попытке предсказать реальную амплитуду вибрации на основе изменения напряжения. В этом случае есть три основные причины, по которым измеренное значение амплитуды может отличаться от нашей оценки.
Нелинейное поведение напряжения/скорости
Удвоение напряжения не обязательно приводит к удвоению скорости. Некоторые двигатели имеют высокое пусковое напряжение и очень плоскую зависимость напряжения/скорости, в то время как другие имеют очень низкое пусковое напряжение, но могут не иметь линейной зависимости.
Некоторые двигатели имеют высокое пусковое напряжение и очень плоскую зависимость напряжения/скорости, в то время как другие имеют очень низкое пусковое напряжение, но могут не иметь линейной зависимости.
Как правило, для прогнозирования скорости требуются дополнительные уравнения и знание констант двигателя постоянного тока, что выходит за рамки данного бюллетеня по применению. Кроме того, обычно это не требуется, поскольку производительность двигателя в диапазоне напряжений можно узнать из наших спецификаций (обсуждается ниже).
Производственный допуск
Даже имея доступ к приведенной выше информации (постоянные двигателя и т. д.), существуют допуски при производстве двигателей, и два двигателя из одной партии могут вести себя не совсем одинаково. Между партиями разница может быть еще больше.
Обратите внимание, что в разделе «Эксплуатационные характеристики» спецификаций к номинальной скорости добавлено значение допуска. Как мы описали выше, изменение скорости оказывает влияние на амплитуду вибрации.
Неточности измерений
Приведенные выше уравнения основаны на упрощенной модели с использованием ограниченных степеней свободы. На самом деле вибрационный двигатель имеет несколько режимов вибрации с разными скоростями/амплитудами, а также необходимо учитывать материал и технику крепления (особенно в отношении жесткости).
Таким образом, хотя они полезны для объяснения теории влияния напряжения на скорость и амплитуду, их нельзя использовать для чрезвычайно точных прогнозов. Однако при необходимости их можно использовать для общих оценок.
К счастью, вам не нужно рассчитывать амплитуду или частоту вибрации для наших двигателей ERM — мы уже сделали эту работу за вас. Наши таблицы данных включают графики типичных рабочих характеристик, на которых показано линейное напряжение в зависимости от амплитуды вибрации, частоты, эффективности и потребляемого тока.
График ниже относится к 307-103, где мы можем видеть (слегка) нелинейную зависимость напряжения/частоты и гораздо более выраженную нелинейность с амплитудой вибрации:
307-103 Характеристики вибрации двигателяИндивидуальные двигатели
Конечно, изменение управляющего напряжения — не единственный способ изменить скорость двигателя или амплитуду вибрации, есть две основные области настройки, которые могут повлиять на производительность двигателя.
Ранее мы обсуждали процесс проектирования индивидуальных эксцентриковых масс и их влияние на производительность в Бюллетене по применению 027: Параметры эксцентриковых масс для вибрационных двигателей. По сути, конструкция массы может влиять на нагрузку, воспринимаемую двигателем постоянного тока, и, следовательно, влиять на соотношение напряжения и скорости двигателя.
Кроме того, двигатели постоянного тока можно оснастить электродвигателями постоянного тока с индивидуальными электрическими и/или механическими характеристиками, например, перемотав их для другого номинального напряжения. Двигатели постоянного тока также бывают разных форм-факторов, что может ограничивать выбор определенных конструкций. Например, модель 308-103 может позволить себе иметь большую эксцентриковую массу для дополнительной амплитуды, но это невозможно для инкапсулированных или монетных вибрационных двигателей.
Обе эти настройки позволяют создавать различные профили для балансировки размера двигателя, скорости, напряжения и нагрузки — комбинация, которая дает нам различные продукты вибрационных двигателей, адаптированные для различных приложений.
Заключение
Мы можем легко управлять напряжением возбуждения, чтобы регулировать скорость двигателя и, в свою очередь, изменять амплитуду и частоту вибрации. Мы также объяснили, что амплитуда и частота вибрации связаны и не могут независимо контролироваться напряжением, потому что они оба зависят от скорости.
Мы видели, что зависимость между амплитудой вибрации и частотой (и, следовательно, скоростью) не является линейной, и мы также показали, что может быть трудно предсказать реальную амплитуду по изменению напряжения. Однако графики типичных рабочих характеристик Precision Microdrives значительно упрощают этот процесс и позволяют вам читать поведение двигателей (типичное) при заданном напряжении.
Кроме того, изменение напряжения может повлиять на скорость вращения двигателя, а не только на максимальную скорость. По этой причине можно использовать напряжение для улучшения тактильных эффектов и двигательной активности.
Убедившись, что управляющее напряжение находится между максимальным пусковым напряжением и максимальным номинальным рабочим напряжением, мы можем обеспечить долговечность и надежность двигателя. Чтобы помочь выбрать правильный двигатель, вам может пригодиться наше Руководство по сравнению вибрационных двигателей .
Чтобы помочь выбрать правильный двигатель, вам может пригодиться наше Руководство по сравнению вибрационных двигателей .
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.
Зарегистрироваться
ИмяПервый Последний
Электронная почта (обязательно)
Согласие с условиями (обязательно)Я прочитал и согласен с Условиями и политикой конфиденциальности Precision Microdrives
Согласие на обсуждение (обязательно)Я рад, что Precision Microdrives получил мои данные, чтобы мы могли обсудить мой запрос
Узнать больше
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Глобальные стандарты напряжения и частоты
В этой таблице указаны напряжения, частоты и типы вилок, которые используются во всем мире.
Ниже приведен список всех вилок, частот и напряжений, перечисленных во всем мире. Каждая страна указана вместе с типом вилки, частотой (Гц/Гц) и напряжением.
Под типом вилки вы увидите разные буквы, обозначающие вилки, используемые в этой стране. Если вы когда-либо уезжали в отпуск в другую страну и вам нужно было купить штепсельный преобразователь, эти буквы указывают, какой из этих преобразователей вам нужно будет использовать. Информация о глобальном напряжении получена из мировых стандартов.
| Страна/штат/территория | Однофазное напряжение (вольт) | Частота (герц) | Заглушка типа |
|---|---|---|---|
| Абу-Даби (не страна, а столица Объединенных Арабских Эмиратов) | 230 В | 50 Гц | G |
| Афганистан | 220 В | 50 Гц | C/F |
| Албания | 230 В | 50 Гц | C/F |
| Алжир | 230 В | 50 Гц | C/F |
| Американское Самоа | 120 В | 60 Гц | A / B / F / I |
| Андорра | 230 В | 50 Гц | C/F |
| Ангола | 220 В | 50 Гц | C |
| Ангилья | 110 В | 60 Гц | A / B |
| Антигуа и Барбуда | 230 В | 60 Гц | A / B |
| Аргентина | 220 В | 50 Гц | I |
| Армения | 230 В | 50 Гц | C/F |
| Аруба | 120 В | 60 Гц | A / B / F |
| Австралия | 230 В | 50 Гц | I |
| Австрия | 230 В | 50 Гц | C/F |
| Азербайджан | 220 В | 50 Гц | C / F |
| Азорские острова | 230 В | 50 Гц | B / C / F |
| Багамские острова | 120 В | 60 Гц | A / B |
| Бахрейн | 230 В | 50 Гц | G |
| Балеарские острова | 230 В | 50 Гц | C/F |
| Бангладеш | 220 В | 50 Гц | A / C / D / G / K |
| Барбадос | 115 В | 50 Гц | A / B |
| Беларусь | 220 В | 50 Гц | К/Ф |
| Бельгия | 230 В | 50 Гц | C/E |
| Белиз | 110 В / 220 В | 60 Гц | A / B / G |
| Бенин | 220 В | 50 Гц | C / E |
| Бермуды | 120 В | 60 Гц | А/В |
| Бутан | 230 В | 50 Гц | C / D / G |
| Боливия | 230 В | 50 Гц | Переменный ток |
| Бонэйр | 127 В | 50 Гц | Переменный ток |
| Босния и Герцеговина | 230 В | 50 Гц | C / F |
| Ботсвана | 230 В | 50 Гц | Д/Г |
| Бразилия | 127 В / 220 В | 60 Гц | C / N |
| Британские Виргинские острова | 110 В | 60 Гц | A / B |
| Бруней | 240 В | 50 Гц | G |
| Болгария | 230 В | 50 Гц | C/F |
| Буркина-Фасо | 220 В | 50 Гц | С/Е |
| Бирма (официально Мьянма) | 230 В | 50 Гц | A / C / D / G / I |
| Бурунди | 220 В | 50 Гц | C/E |
| Камбоджа | 230 В | 50 Гц | A / C / G |
| Камерун | 220 В | 50 Гц | C/E |
| Канада | 120 В | 60 Гц | А/Б |
| Канарские острова | 230 В | 50 Гц | C / E / F |
| Кабо-Верде | 230 В | 50 Гц | C/F |
| Каймановы острова | 120 В | 60 Гц | A / B |
| Центральноафриканская Республика | 220 В | 50 Гц | C / E |
| Чад | 220 В | 50 Гц | К/Д/Э/Ф |
| Нормандские острова (Гернси и Джерси) | 230 В | 50 Гц | C / G |
| Чили | 220 В | 50 Гц | C / L |
| Китай, Народная Республика | 220 В | 50 Гц | A / C / I |
| Остров Рождества | 230 В | 50 Гц | I |
| Кокосовые острова (острова Килинг) | 230 В | 50 Гц | I |
| Колумбия | 110 В | 60 Гц | A / B |
| Коморские острова | 220 В | 50 Гц | C / E |
| Конго, Демократическая Республика | 220 В | 50 Гц | C / D / E |
| Конго, Народная Республика | 230 В | 50 Гц | C/E |
| Острова Кука | 240 В | 50 Гц | I |
| Коста-Рика | 120 В | 60 Гц | A / B |
| Кот-д’Ивуар (Берег Слоновой Кости) | 220 В | 50 Гц | C / E |
| Хорватия | 230 В | 50 Гц | C/F |
| Куба | 110 В / 220 В | 60 Гц | A / B / C / L |
| Кюрасао | 127 В | 50 Гц | А/В |
| Кипр | 230 В | 50 Гц | G |
| Кипр, Север (непризнанное, самопровозглашенное государство) | 230 В | 50 Гц | G |
| Чехия (Чехия) | 230 В | 50 Гц | C/E |
| Дания | 230 В | 50 Гц | C / E / F / K |
| Джибути | 220 В | 50 Гц | C/E |
| Доминика | 230 В | 50 Гц | D / G |
| Доминиканская Республика | 120 В | 60 Гц | A / B / C |
| Дубай (не страна, а крупнейший город ОАЭ) | 230 В | 50 Гц | G |
| Восточный Тимор (Тимор-Лешти) | 220 В | 50 Гц | C/E/F/I |
| Эквадор | 120 В | 60 Гц | A / B |
| Египет | 220 В | 50 Гц | C/F |
| Сальвадор | 120 В | 60 Гц | A / B |
| Англия | 230 В | 50 Гц | G |
| Экваториальная Гвинея | 220 В | 50 Гц | С/Е |
| Эритрея | 230 В | 50 Гц | C / L |
| Эстония | 230 В | 50 Гц | C/F |
| Эфиопия | 220 В | 50 Гц | C/F |
| Фарерские острова | 230 В | 50 Гц | C / E / F / K |
| Фолклендские острова | 240 В | 50 Гц | G |
| Фиджи | 240 В | 50 Гц | I |
| Финляндия | 230 В | 50 Гц | C/F |
| Франция | 230 В | 50 Гц | C/E |
| Французская Гвиана | 220 В | 50 Гц | C / D / E |
| Габон (Габонская Республика) | 220 В | 50 Гц | C |
| Гамбия | 230 В | 50 Гц | G |
| Сектор Газа (Газа) | 230 В | 50 Гц | C/H |
| Грузия | 220 В | 50 Гц | C/F |
| Германия | 230 В | 50 Гц | C/F |
| Гана | 230 В | 50 Гц | D / G |
| Гибралтар | 230 В | 50 Гц | Г |
| Великобритания (GB) | 230 В | 50 Гц | G |
| Греция | 230 В | 50 Гц | C/F |
| Гренландия | 230 В | 50 Гц | C / E / F / K |
| Гренада | 230 В | 50 Гц | G |
| Гваделупа | 230 В | 50 Гц | C / E |
| Гуам | 110 В | 60 Гц | A / B |
| Гватемала | 120 В | 60 Гц | A / B |
| Гвинея | 220 В | 50 Гц | C / F / K |
| Гвинея-Бисау | 220 В | 50 Гц | C |
| Гайана | 120 В / 240 В | 60 Гц | A / B / D / G |
| Гаити | 110 В | 60 Гц | A / B |
| Голландия (официально Нидерланды) | 230 В | 50 Гц | C/F |
| Гондурас | 60 Гц | A / B | |
| Гонконг | 220 В | 50 Гц | G |
| Венгрия | 230 В | 50 Гц | C/F |
| Исландия | 230 В | 50 Гц | Х/Ф |
| Индия | 230 В | 50 Гц | C / D / M |
| Индонезия | 230 В | 50 Гц | C/F |
| Иран | 230 В | 50 Гц | C/F |
| Ирак | 230 В | 50 Гц | C / D / G |
| Ирландия (Ирландия) | 230 В | 50 Гц | Г |
| Ирландия, Северная | 230 В | 50 Гц | G |
| Остров Мэн | 230 В | 50 Гц | C / G |
| Израиль | 230 В | 50 Гц | C/H |
| Италия | 230 В | 50 Гц | C / F / L |
| Ямайка | 110 В | 50 Гц | A / B |
| Япония | 100 В | 50 Гц / 60 Гц | A / B |
| Иордания | 230 В | 50 Гц | C / D / F / G / J |
| Казахстан | 220 В | 50 Гц | Х/Ф |
| Кения | 240 В | 50 Гц | G |
| Кирибати | 240 В | 50 Гц | I |
| Корея, Северная | 220 В | 50 Гц | С |
| Южная Корея | 220 В | 60 Гц | F |
| Косово | 230 В | 50 Гц | C/F |
| Кувейт | 240 В | 50 Гц | G |
| Кыргызстан | 220 В | 50 Гц | Х/Ф |
| Лаос | 230 В | 50 Гц | А/Б/К/Е/Ф |
| Латвия | 230 В | 50 Гц | C/F |
| Ливан | 230 В | 50 Гц | C / D / G |
| Лесото | 220 В | 50 Гц | M |
| Либерия | 120 В | 60 Гц | A / B |
| Ливия | 230 В | 50 Гц | C / L |
| Лихтенштейн | 230 В | 50 Гц | C/J |
| Литва | 230 В | 50 Гц | C/F |
| Люксембург | 230 В | 50 Гц | C/F |
| Макао | 220 В | 50 Гц | G |
| Македония, Республика (бывшая югославская Республика Македония, БЮРМ) | 230 В | 50 Гц | К/Ф |
| Мадагаскар | 220 В | 50 Гц | C / E |
| Мадейра | 230 В | 50 Гц | C/F |
| Малави | 230 В | 50 Гц | G |
| Малайзия | 240 В | 50 Гц | G |
| Мальдивы | 230 В | 50 Гц | C / D / G / J / K / L |
| Мали | 220 В | 50 Гц | C/E |
| Мальта | 230 В | 50 Гц | G |
| Маршалловы Острова | 120 В | 60 Гц | A / B |
| Мартиника | 220 В | 50 Гц | C / D / E |
| Мавритания | 220 В | 50 Гц | C |
| Маврикий | 230 В | 50 Гц | С/Г |
| Майотта | 230 В | 50 Гц | C / E |
| Мексика | 120 В | 60 Гц | A / B |
| Микронезия, Федеративные Штаты | 120 В | 60 Гц | A / B |
| Молдова | 230 В | 50 Гц | Х/Ф |
| Монако | 230 В | 50 Гц | C/E/F |
| Монголия | 230 В | 50 Гц | C/E |
| Черногория | 230 В | 50 Гц | C/F |
| Монтсеррат | 230 В | 60 Гц | A / B |
| Марокко | 220 В | 50 Гц | C/E |
| Мозамбик | 220 В | 50 Гц | К/Ж/М |
| Мьянма (ранее Бирма) | 230 В | 50 Гц | A / C / D / G / I |
| Намибия | 220 В | 50 Гц | Д/М |
| Науру | 240 В | 50 Гц | I |
| Непал | 230 В | 50 Гц | C / D / M |
| Нидерланды | 230 В | 50 Гц | К/Ф |
| Новая Каледония | 220 В | 50 Гц | C/F |
| Новая Зеландия | 230 В | 50 Гц | I |
| Никарагуа | 120 В | 60 Гц | A / B |
| Нигер | 220 В | 50 Гц | C / D / E / F |
| Нигерия | 230 В | 50 Гц | Д/Г |
| Ниуэ | 230 В | 50 Гц | I |
| Остров Норфолк | 230 В | 50 Гц | I |
| Северный Кипр (непризнанное, самопровозглашенное государство) | 230 В | 50 Гц | G |
| Северная Ирландия | 230 В | 50 Гц | G |
| Северная Корея | 220 В | 50 Гц | C |
| Норвегия | 230 В | 50 Гц | C/F |
| Оман | 240 В | 50 Гц | G |
| Пакистан | 230 В | 50 Гц | C/D |
| Палау | 120 В | 60 Гц | A / B |
| Палестина | 230 В | 50 Гц | C/H |
| Панама | 120 В | 60 Гц | А/В |
| Папуа-Новая Гвинея | 240 В | 50 Гц | I |
| Парагвай | 220 В | 50 Гц | C |
| Перу | 220 В | 60 Гц | Переменный ток |
| Филиппины | 220 В | 60 Гц | A / B / C |
| Острова Питкэрн | 230 В | 50 Гц | я |
| Польша | 230 В | 50 Гц | C/E |
| Португалия | 230 В | 50 Гц | C/F |
| Пуэрто-Рико | 120 В | 60 Гц | A / B |
| Катар | 240 В | 50 Гц | G |
| Реюньон | 230 В | 50 Гц | C / E |
| Румыния | 230 В | 50 Гц | П/Ф |
| Россия (официально Российская Федерация) | 220 В | 50 Гц | C/F |
| Руанда | 230 В | 50 Гц | C/J |
| Саба | 110 В | 60 Гц | A / B |
| Сен-Бартельми (неофициально также называемый Сен-Барт или Сен-Бартс) | 230 В | 60 Гц | С/Е |
| Сент-Китс и Невис (официально Федерация Сент-Кристофер и Невис) | 230 В | 60 Гц | D/G |
| Сент-Люсия | 230 В | 50 Гц | G |
| Сен-Мартен | 220 В | 60 Гц | C / E |
| Остров Святой Елены | 230 В | 50 Гц | G |
| Синт-Эстатиус | 110 В / 220 В | 60 Гц | A / B / C / F |
| Сен-Мартен | 110 В | 60 Гц | A / B |
| Сент-Винсент и Гренадины | 110 В / 230 В | 50 Гц | A / B / G |
| Самоа | 230 В | 50 Гц | I |
| Сан-Марино | 230 В | 50 Гц | C / F / L |
| Сан-Томе и Принсипи | 230 В | 50 Гц | C/F |
| Саудовская Аравия | 230 В | 60 Гц | G |
| Шотландия | 230 В | 50 Гц | G |
| Сенегал | 230 В | 50 Гц | C / D / E / K |
| Сербия | 230 В | 50 Гц | C/F |
| Сейшелы | 240 В | 50 Гц | G |
| Сьерра-Леоне | 230 В | 50 Гц | D / G |
| Сингапур | 230 В | 50 Гц | G |
| Словакия | 230 В | 50 Гц | C / E |
| Словения | 230 В | 50 Гц | C/F |
| Соломоновы Острова | 230 В | 50 Гц | Г/В |
| Сомали | 220 В | 50 Гц | C |
| Сомалиленд | 220 В | 50 Гц | C |
| Южная Африка | 230 В | 50 Гц | C/M/N (ещё редко) |
| Южная Корея | 220 В | 60 Гц | F |
| Южный Судан | 230 В | 50 Гц | С/D |
| Испания | 230 В | 50 Гц | C/F |
| Шри-Ланка | 230 В | 50 Гц | Д/Г |
| Судан | 230 В | 50 Гц | C/D |
| Суринам | 127 В / 230 В | 60 Гц | A / B / C / F |
| Свазиленд | 230 В | 50 Гц | М |
| Швеция | 230 В | 50 Гц | C/F |
| Швейцария | 230 В | 50 Гц | C/J |
| Сирия | 220 В | 50 Гц | C / E / L |
| Таити | 220 В | 50 Гц / 60 Гц | C / E |
| Тайвань | 110 В | 60 Гц | A / B |
| Таджикистан | 220 В | 50 Гц | C/F |
| Танзания | 230 В | 50 Гц | D / G |
| Таиланд | 230 В | 50 Гц | A / B / C / O |
| Того | 220 В | 50 Гц | C |
| Токелау | 230 В | 50 Гц | I |
| Тонга | 240 В | 50 Гц | I |
| Тринидад и Тобаго | 115 В | 60 Гц | A / B |
| Тунис | 230 В | 50 Гц | C/E |
| Турция | 230 В | 50 Гц | C/F |
| Туркменистан | 220 В | 50 Гц | Х/Ф |
| Острова Теркс и Кайкос | 120 В | 60 Гц | А/В |
| Тувалу | 230 В | 50 Гц | I |
| Уганда | 240 В | 50 Гц | G |
| Украина | 230 В | 50 Гц | Х/Ф |
| Объединенные Арабские Эмираты (ОАЭ) | 230 В | 50 Гц | G |
| Соединенное Королевство (Великобритания) | 230 В | 50 Гц | Г |
| Соединенные Штаты Америки (США) | 120 В | 60 Гц | A / B |
| Виргинские острова США | 110 В | 60 Гц | A / B |
| Уругвай | 220 В | 50 Гц | C / F / L |
| Узбекистан | 220 В | 50 Гц | C/F |
| Вануату | 230 В | 50 Гц | я |
| Ватикан | 230 В | 50 Гц | C / F / L |
| Венесуэла | 120 В | 60 Гц | A / B |
| Вьетнам | 220 В | 50 Гц | A / B / C |
| Виргинские острова (Британские) | 110 В | 60 Гц | A / B |
| Виргинские острова (США) | 110 В | 60 Гц | А/Б |
| Уэльс | 230 В | 50 Гц | G |
| Йемен | 230 В | 50 Гц | A / D / G |
| Замбия | 230 В | 50 Гц | C / D / G |
| Зимбабве | 240 В | 50 Гц | Д/Г |
Зачем нам нужна вся страна на одной частоте
Современный мир держится на изменчивой, шипящей паутине электричества.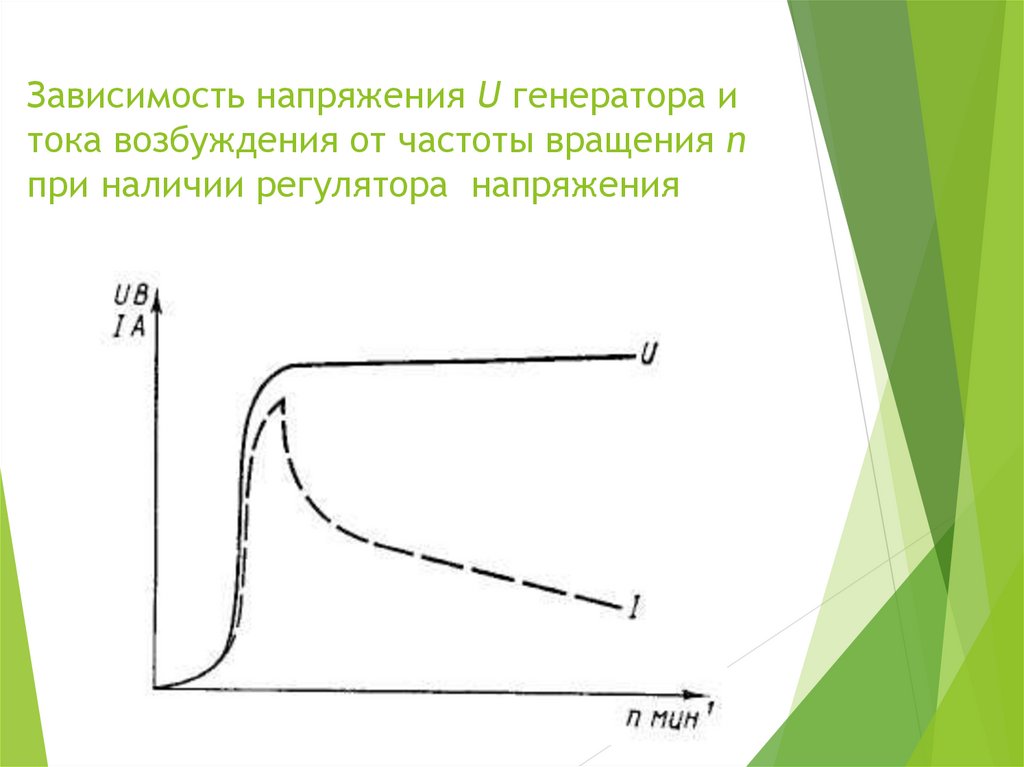 Согласно государственной статистике, в 2015 году Великобритания потребляла примерно 303 тераватт-часа (ТВтч) электроэнергии. Это ужасно много энергии, и в этой стране мы считаем само собой разумеющимся, что электричество находится под контролем. Это означает, что источник питания, поступающий в ваш дом или на работу, надежен и не отключит блок предохранителей. Короче говоря, это означает, что ваш мобильный телефон будет продолжать заряжаться, а ваша стиральная машина будет продолжать работать.
Согласно государственной статистике, в 2015 году Великобритания потребляла примерно 303 тераватт-часа (ТВтч) электроэнергии. Это ужасно много энергии, и в этой стране мы считаем само собой разумеющимся, что электричество находится под контролем. Это означает, что источник питания, поступающий в ваш дом или на работу, надежен и не отключит блок предохранителей. Короче говоря, это означает, что ваш мобильный телефон будет продолжать заряжаться, а ваша стиральная машина будет продолжать работать.
Но производство и циркуляция электроэнергии на безопасных и пригодных для использования уровнях — непростая задача. Одним из наиболее игнорируемых аспектов этого является электрическая частота и то, как она регулируется.
Что такое электрическая частота? Чтобы понять важность частоты, нам нужно понять пару важных вещей о производстве электроэнергии. Генераторы работают путем преобразования кинетической энергии вращающейся турбины в электрическую энергию.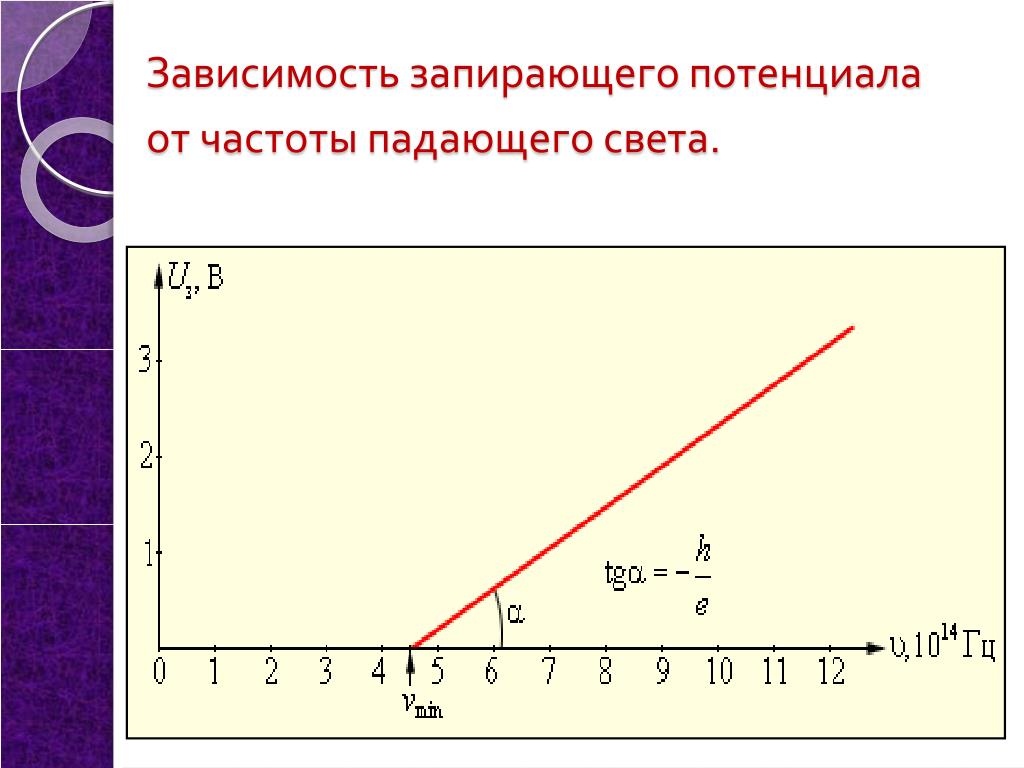 В паровом генераторе (например, на электростанции Дракс) пар высокого давления вращает турбину, которая вращает ротор, установленный внутри статора. Медная проволока намотана вокруг ротора, находящегося под напряжением, что превращает его в электромагнит с северным и южным полюсами.
В паровом генераторе (например, на электростанции Дракс) пар высокого давления вращает турбину, которая вращает ротор, установленный внутри статора. Медная проволока намотана вокруг ротора, находящегося под напряжением, что превращает его в электромагнит с северным и южным полюсами.
Статор состоит из больших прочных медных стержней, окружающих ротор. Когда ротор вращается, его магнитное поле проходит через медные стержни и индуцирует электрический ток, который направляется в систему передачи.
Поскольку магнитное поле имеет северный и южный полюса, медные стержни испытывают изменение направления магнитного поля каждый раз, когда ротор вращается. Это заставляет электрический ток менять направление дважды за оборот и называется переменным током (AC). На самом деле в статоре есть три набора медных стержней, производящих три электрических выхода или фазы, называемые красной, желтой и синей.
Электрическая частота является мерой скорости этого колебания и измеряется числом изменений в секунду, также называемым герцами (Гц).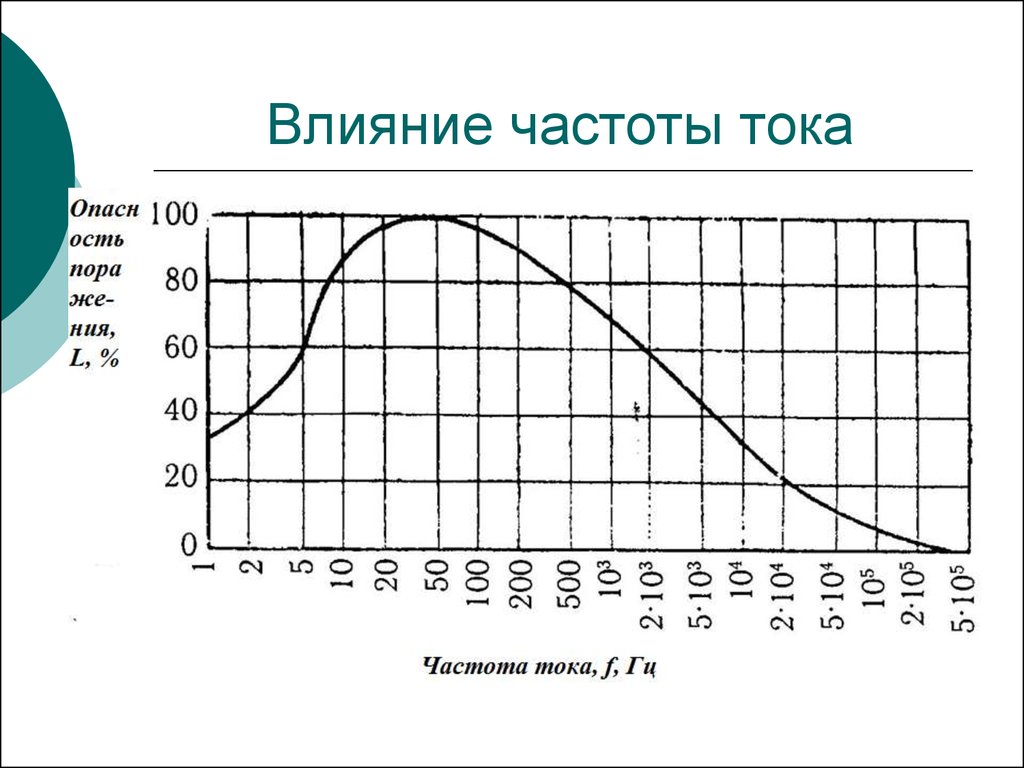 Генератор с двумя магнитными полюсами, работающий со скоростью 3000 об/мин, производит электричество с частотой 50 Гц.
Генератор с двумя магнитными полюсами, работающий со скоростью 3000 об/мин, производит электричество с частотой 50 Гц.
Поддержание постоянной электрической частоты важно, поскольку несколько частот не могут работать параллельно друг с другом, не повреждая оборудование. Это имеет серьезные последствия при обеспечении электроэнергией в национальном масштабе.
Точное значение менее важно, чем необходимость поддерживать стабильную частоту во всех подключенных системах. В Великобритании частота сети составляет 50 Гц. В США это 60 Гц. В Японии западная половина страны работает на частоте 60 Гц, а восточная половина страны работает на частоте 50 Гц — цепочка электростанций в центре страны повышает и понижает частоту электричества, когда оно течет между двумя сетки.
Работа на одной национальной частоте — это командная работа. Каждый генератор в Англии, Шотландии и Уэльсе, подключенный к системе передачи высокого напряжения, синхронизирован со всеми остальными генераторами.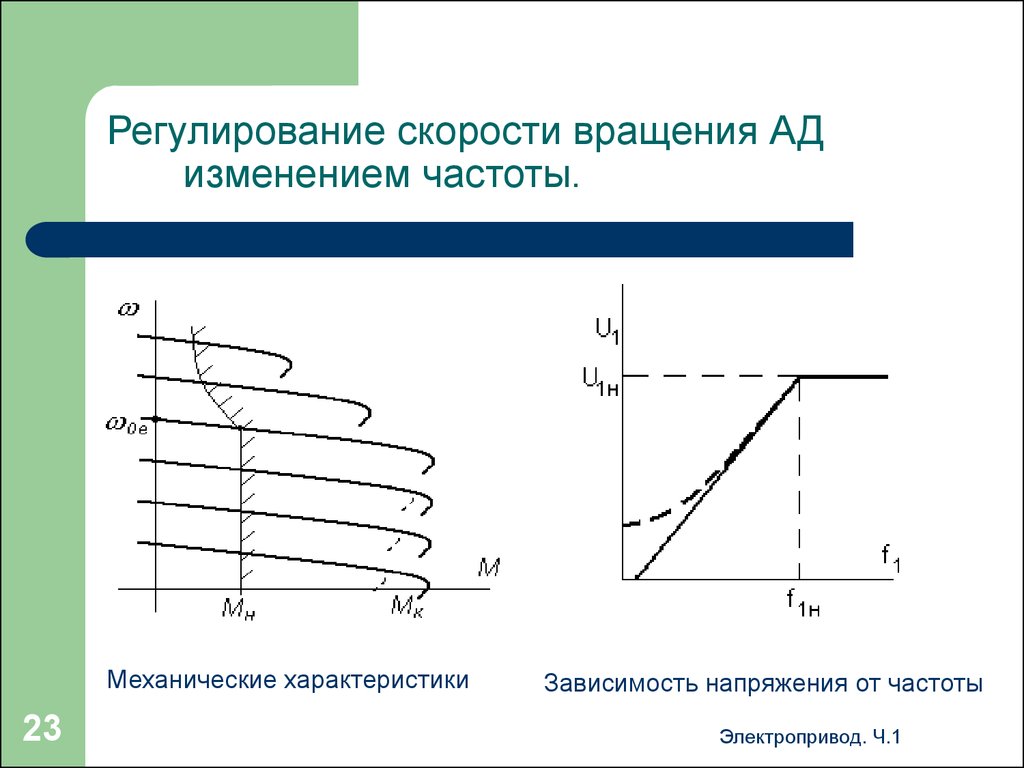
Когда мощность любой из трех фаз — красной, желтой или синей — находится на пике, мощность всех других фаз того же цвета на каждом другом генераторе в Великобритании также находится на пике. Все они соединены вместе – синхронизированы – для формирования единого однородного источника, обеспечивающего стабильность и гарантированное качество.
Как осуществляется управление частотой?Проблема в том, что частоту может быть трудно контролировать — если точное количество используемой электроэнергии не соответствует выработке, это может повлиять на частоту электричества в сети.
Например, если спрос на электроэнергию больше, чем предложение, частота упадет. Если есть слишком много питания, частота будет расти. Чтобы сделать вопросы более деликатными, существует очень небольшая погрешность.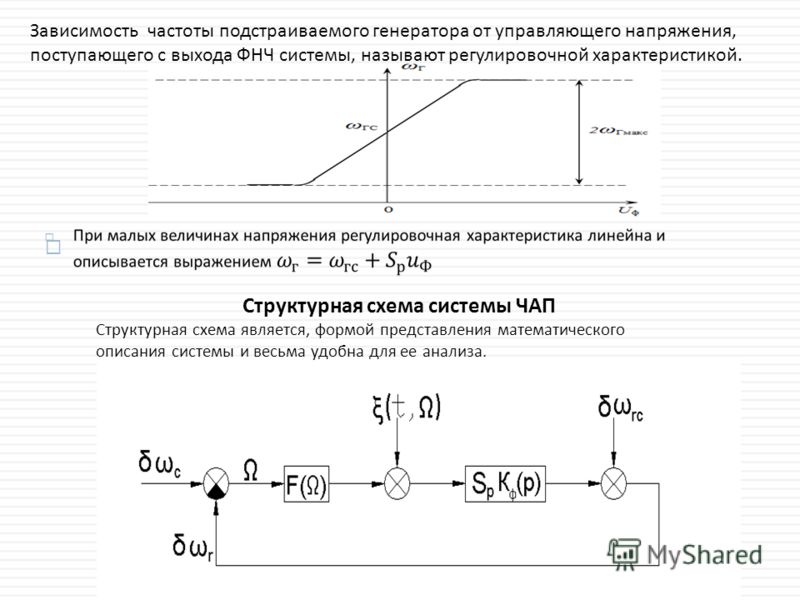 В Великобритании все, что на 1% выше или ниже стандартных 50 Гц, может повредить оборудование и инфраструктуру. (Посмотрите, насколько сильно частота страны в настоящее время отклоняется от 50 Гц.)
В Великобритании все, что на 1% выше или ниже стандартных 50 Гц, может повредить оборудование и инфраструктуру. (Посмотрите, насколько сильно частота страны в настоящее время отклоняется от 50 Гц.)
Управление электрической частотой возлагается на оператора системы передачи высокого напряжения страны (Национальная электросеть в Великобритании). Сеть может дать указание генераторам энергии, таким как Дракс, заставить их генераторы автоматически реагировать на изменения частоты. Если частота повышается, турбина уменьшает расход пара. Если он упадет, он увеличится, изменяя электрическую мощность — изменение, которое должно произойти за секунды.
В случае генераторных установок на электростанции Дракс реакция начинается менее чем через секунду после начального отклонения частоты. Силы инерции во вращающемся генераторе помогают замедлить скорость изменения частоты, действуя как демпферы на подвеске автомобиля, что сводит к минимуму большие колебания частоты.
Частота в быстро меняющейся системе Не все технологии производства электроэнергии подходят для обеспечения высококачественных частотных характеристик, и по мере того, как Великобритания переходит к экономике с низким уровнем выбросов углерода, вспомогательные услуги, такие как стабилизация частоты, становятся все более важными.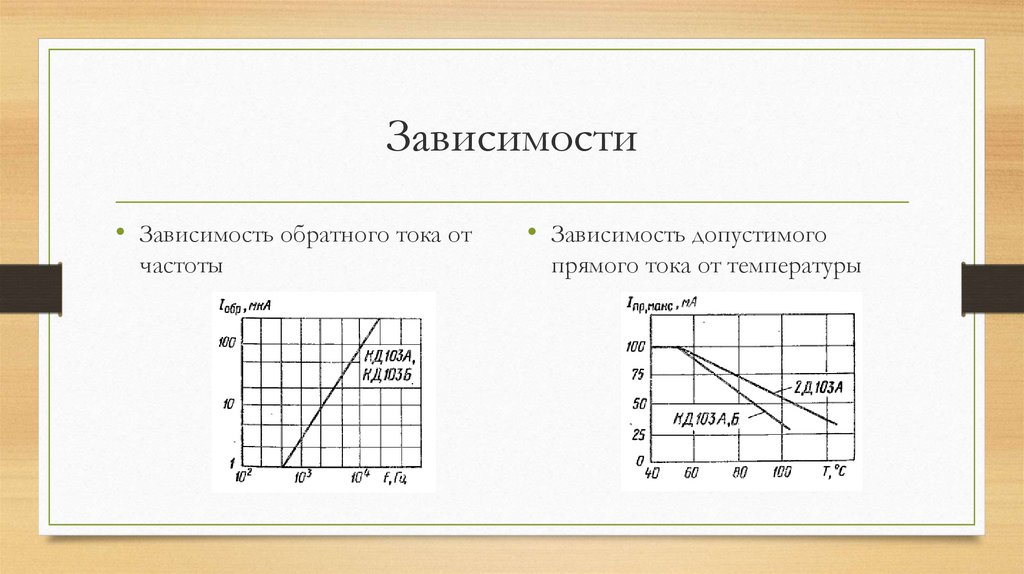
Ни солнечную, ни ветровую энергию нельзя так легко контролировать. Можно уменьшить мощность ветра или заблокировать ветряные турбины, чтобы обеспечить восходящую частотную характеристику при достаточном ветре.
Точно так же можно включать и выключать солнечные батареи для имитации частотной характеристики. Поскольку солнечные фермы так широко рассредоточены и, как правило, встроены, то есть они работают за пределами национальной системы, National Grid не так просто инструктировать и контролировать их. И ветер, и солнечная энергия не имеют инерции, поэтому также отсутствует важнейший демпфирующий эффект. Использование этих прерывистых или зависящих от погоды технологий выработки электроэнергии для управления частотой может быть дорогостоящим по сравнению с тепловыми электростанциями.
Нынешний парк ядерных реакторов также не является гибким — ядерные реакторы в Великобритании были спроектированы для непрерывной работы при высоких нагрузках (известных как мощность базовой нагрузки). Хотя они не могут предоставлять услуги частотного отклика, атомные электростанции страны обеспечивают инерцию.
Хотя они не могут предоставлять услуги частотного отклика, атомные электростанции страны обеспечивают инерцию.
Технологии производства тепловой энергии, такие как возобновляемая биомасса или ископаемые виды топлива, такие как уголь и газ, идеально подходят для услуг частотной характеристики в масштабе, поскольку их можно легко увеличивать или уменьшать. Поскольку подача топлива в их котлы и пара в их турбинах могут регулироваться, тепловые энергоблоки мощностью 645 МВт в Drax имеют возможность реагировать на потребности сети всего за полсекунды или меньше, завершая изменение мощности за меньше одной секунды и сохраняют свою реакцию в течение многих минут или даже часов.
До введения больших объемов ветровой и солнечной генерации почти все генераторы (за исключением атомных), работающие в системе, могли обеспечивать частотную характеристику. Поскольку эти генераторы все чаще заменяются прерывистыми технологиями, системный оператор должен искать новые услуги для поддержания стабильности системы.
Примером может служить недавний тендер National Grid на расширенную частотную характеристику, в ходе которого требовалось решение, обеспечивающее стабилизацию частоты менее чем за секунду, что в 20 раз быстрее, чем первичная характеристика, обеспечиваемая существующими тепловыми электростанциями. Drax была единственной участвующей тепловой электростанцией, однако все контракты были выиграны проектами аккумуляторных батарей.
Будущая частотаПринимая во внимание снижение выработки электроэнергии на ископаемом топливе и неопределенность в отношении нашей энергетики в ближайшие десятилетия, National Grid проводит консультации о том, как лучше всего использовать такие услуги, как частотная характеристика. Идеальным сценарием для National Grid является тот, в котором услуги могут все чаще предоставляться за счет надежных, гибких и доступных форм низкоуглеродной генерации или реагирования на спрос.
Атомные электростанции следующего поколения, как и некоторые уже действующие во Франции, могут предоставлять услуги частотной характеристики.