Замена двигателей постоянного тока на асинхронные двигатели переменного тока
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2. Наличие щеточно-коллекторного узла
Наличие щеточно-коллекторного узла
4. Необходимость в периодическом обслуживании
Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты.
При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам:
1. По номинальной скорости вращения
Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока.
2. По моменту (номинальному, пусковому, максимальному)
На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока
3. По режиму работы
Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов.
Подразделяют следующие режимы работы:
Продолжительный режим (S1) — режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры.
 Режим характеризуется неизменными потерями в течение всего времени работы машины.
Режим характеризуется неизменными потерями в течение всего времени работы машины.Кратковременный режим (S2) — режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния.
Повторно-кратковременный режим (S3-S8) — отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
4. По условиям эксплуатации
Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды.
По всем вопросам, касательно данного применения обращайтесь в ООО «Драйвика» по тел. 8 (812) 635 90 30 или Email: [email protected]
Замена двигателя постоянного тока на асинхронный расчет
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т. д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2. Наличие щеточно-коллекторного узла
3. Большая масса
4. Необходимость в периодическом обслуживании
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т. д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2. Наличие щеточно-коллекторного узла
3. Большая масса
4. Необходимость в периодическом обслуживании
Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты.
При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам:
1. По номинальной скорости вращения
Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока.
2. По моменту (номинальному, пусковому, максимальному)
Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма.
На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока
3. По режиму работы
Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов.
Подразделяют следующие режимы работы:
Продолжительный режим (S1) — режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины.
Режим характеризуется неизменными потерями в течение всего времени работы машины.
Кратковременный режим (S2) — режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния.
Повторно-кратковременный режим (S3-S8) — отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
4. По условиям эксплуатации
Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды.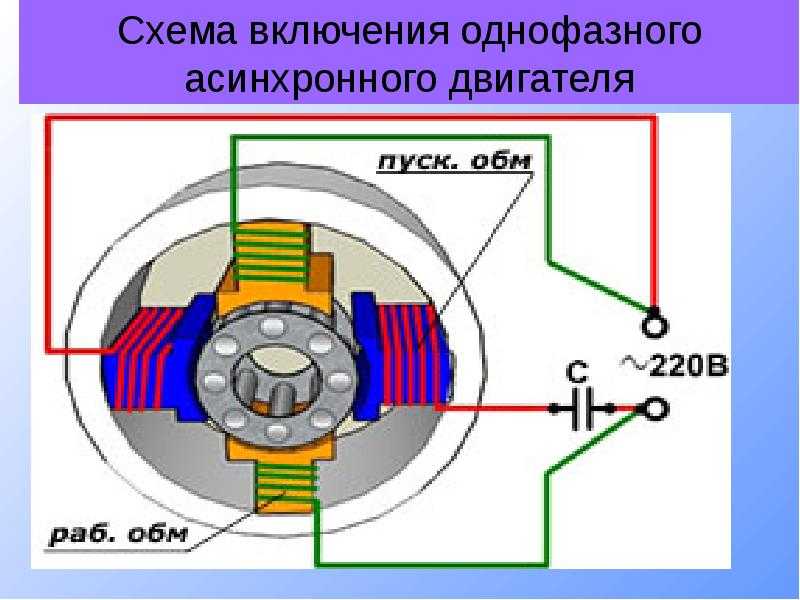 Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.
Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.
Приветствую всех почитателей резьбы по металлу. Прошу совета по подключению двигателя постоянного тока. Хочу поставить его в замен асинхронника. Имею токарный станок 1а616 с двигателем 4 кв. Есть двигатель П22-С1 есть у кого схема подключения. Обязательно с регулировкой оборотов желательно с тахо. Если есть готовые решения стучитесь в личку.
Смотрите также
Комментарии 12
был 616, поставил вообще вместо коробки двиг и частотник, милое дело! ни воя ничего.
У знакомого деда дома стоит именно постоянник только на 3 кВт на такарном. Говорит что все элементарно: на якорь через диодный мост подается 220 за секунду до старта, а на статор тоже через диодный мост с латора киловат на 5 ступенчато 50 -100 -150 -220. Все работает!
Все работает!
Очень надеюсь, что это шутка. Ибо следующий шаг — найти булыжник и спросить, как из него сделать топор.
Если предметно — то есть несколько вариантов управления ДПТ. Самая классическая из ещё встречающихся — система с ламповым каскадом и электромашинным усилителем (в народе — ЭМУ), почти Система Леонардо, почти система Г-Д; места займёт как холодильник и работать не будет ибо не настроите. На закате совка были тиристорные системы, названия не помню, сложнее ламповых во всём и, по-моему, такие приводы шли комплектные, т.е. подобрать под двиг — практически не реально. Места занимает как стиралка.
Вывод: соединяем вал данного двигла муфтой с валом асинхронника и получаем сварочный на постоянку, правда может @бнуть током, если с оборотами промазать))).
А по приводу — серваки на 2 кВт на Али уже до 300 баксов опустились. Самопальные системы со старым постоянником не дадут и близко характеристик современного сервопривода на АД.
Очень не понимаю, зачем постоянник вместо асинхронника. На али сейчас новые частотники на 1,5кВт уже по 90$, сам недавно брал. У меня на фрезере 6е75пф1 стоит ДПТ, был в комплекте с тиристорным драйвером ЭШИР, дохлым, размером с комод ) Весь мозг взорвал, как этот ДПТ подключать. В итоге купил из Англии драйвер Sprint Electric, намного дороже частотника. Но у меня дпт на подачах, там момент постоянный нужен, поэтому асинхронник туда не особо. А зачем на токарнике такой головняк, не понимаю совсем…
На али сейчас новые частотники на 1,5кВт уже по 90$, сам недавно брал. У меня на фрезере 6е75пф1 стоит ДПТ, был в комплекте с тиристорным драйвером ЭШИР, дохлым, размером с комод ) Весь мозг взорвал, как этот ДПТ подключать. В итоге купил из Англии драйвер Sprint Electric, намного дороже частотника. Но у меня дпт на подачах, там момент постоянный нужен, поэтому асинхронник туда не особо. А зачем на токарнике такой головняк, не понимаю совсем…
Не соглашусь. С точки зрения обработки — нужен не постоянный момент, а постоянная скорость. И в этом смысле тип привода не имеет значения. Важен тип системы управления и обратная связь.
Я на расточном на подаче менял ДПТ на асинхронный привод. ОС с энкодера и работало на ура. Правда частотник был Lenze), станочная серия. вроде топ-лайн называлась.
Ну с точки зрения скорости дпт тоже лучше, ибо на моем, например, есть обратная связь на основе тахогенератора, который заведён в привод. На частотнике с асинхронником ос реализуется косвенно, мозгами частотника, что несколько не то. А что касается момента, то на заточном Мож и не важен постоянный момент во всем диапазоне оборотов, но на фрезере очень важен, ибо очень часто бывают малые подачи с большим съемом на которых асинхронник той же мощности (без редуктора) встанет намертво
А что касается момента, то на заточном Мож и не важен постоянный момент во всем диапазоне оборотов, но на фрезере очень важен, ибо очень часто бывают малые подачи с большим съемом на которых асинхронник той же мощности (без редуктора) встанет намертво
Расточной. Это почти как фрезер, только больше и сложнее. И важно поддерживать скорость для постоянства обработки. А из уравнения P=M*w видим, что для поддержания скорости (по которой ОС) при увеличении нагрузки нужно поднимать момент.
Я знаю, что такое расточной, ошибся, написав заточной, да.
Дело в том, что на малых оборотах у асинхронника момент очень мал, поэтому, например на моем фрезере, где редуктора на мотор подач не предусмотрено, асинхронник пойдет только для ускоренной подачи, на малых он встанет.
В классической теории электропривода — да. Но в современной системе управления — не факт. Т.е. меньше он действительно будет (хотя бы в силу внешнего вида характеристики двигателей), но номинал выдаст наверняка. Тут на первое место выходит вопрос охлаждения. Ток и момент пропорциональны. А вот тепло пропорционально квадрату тока. Охлаждать АД нужно принудительно, тогда как ДПТ охлаждения не требует. как правило. И прошу Вас — прекратите этот колхоз)) «момент у асинхронника мал». Момент — величина измеримая и имеет значение. Возьмите двигло киловатт на 100-200. Там момента ХХ на пару Ваших токарных хватит с головой.)))
Тут на первое место выходит вопрос охлаждения. Ток и момент пропорциональны. А вот тепло пропорционально квадрату тока. Охлаждать АД нужно принудительно, тогда как ДПТ охлаждения не требует. как правило. И прошу Вас — прекратите этот колхоз)) «момент у асинхронника мал». Момент — величина измеримая и имеет значение. Возьмите двигло киловатт на 100-200. Там момента ХХ на пару Ваших токарных хватит с головой.)))
Вывод: в системе с ОС АД сначала сгорит, а потом встанет.)
Кстати, в зависимости от системы управления и ещё больше от схемы включения внешняя характеристика ПДТ ОЧЕНЬ сильно меняется. Самый конский момент на низких оборотах у схемы с последовательным возбуждением. «Троллейбусная характеристика», если интересно.
Ну по теории спорить не буду, не силён ) По поводу измеримых величин, так я же писал, что имею в виду дпт и асинхронник одинаковой мощности.
Тупо из практики, асинхронник на 1,5 кВт, подключённый к частотнику векторного типа на частоте 5Гц я спокойно останавливаю рукой за вал. С дпт 1 кВт, подключенному к одноквадрантному приводу Sprint Electric на тех же оборотах не остановлю и пассатижами )
С дпт 1 кВт, подключенному к одноквадрантному приводу Sprint Electric на тех же оборотах не остановлю и пассатижами )
Не соглашусь. С точки зрения обработки — нужен не постоянный момент, а постоянная скорость. И в этом смысле тип привода не имеет значения. Важен тип системы управления и обратная связь.
Я на расточном на подаче менял ДПТ на асинхронный привод. ОС с энкодера и работало на ура. Правда частотник был Lenze), станочная серия. вроде топ-лайн называлась.
Сорри, про ос с энкодера упустил, тогда, конечно же, моя тирада только про момент )
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6.
 Как рассчитать ток и мощность электродвигателя?
Как рассчитать ток и мощность электродвигателя?Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.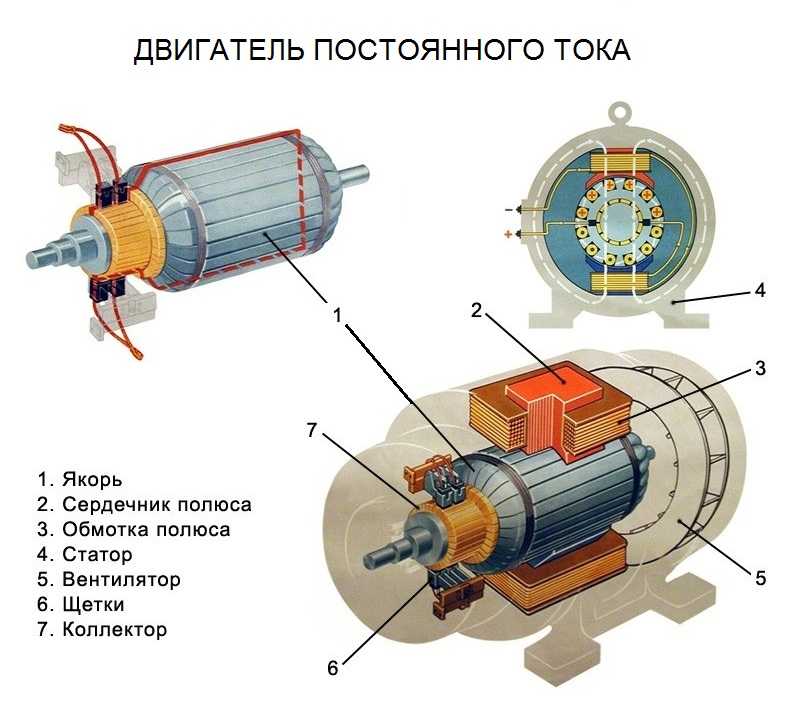
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Замена двигателя/привода постоянного тока на двигатель/привод переменного тока
Использование новой технологии привода позволило расширить возможности применения машин переменного тока там, где обычно использовались машины постоянного тока . В прошлом машины постоянного тока применялись из-за их хороших характеристик крутящего момента во всем диапазоне переменных скоростей. Однако некоторые из этих старых систем привода постоянного тока устаревают, и доступность запасных частей становится проблемой. Такой сценарий часто сопровождается рассмотрением проекта модернизации привода. В этой статье рассматриваются некоторые ключевые моменты и сравнения между двумя разными технологиями, которые могут помочь сделать это решение немного проще.
В прошлом машины постоянного тока применялись из-за их хороших характеристик крутящего момента во всем диапазоне переменных скоростей. Однако некоторые из этих старых систем привода постоянного тока устаревают, и доступность запасных частей становится проблемой. Такой сценарий часто сопровождается рассмотрением проекта модернизации привода. В этой статье рассматриваются некоторые ключевые моменты и сравнения между двумя разными технологиями, которые могут помочь сделать это решение немного проще.
У перехода на переменный ток есть свои преимущества (по сравнению с исходным приложением постоянного тока), но также могут быть и существенные недостатки. Вес каждой из них в уравнении частично зависит от существующей инфраструктуры и возможности ее изменения. Имея это в виду, взгляните на общие плюсы и минусы каждой технологии привода.
Комбинация привод/двигатель постоянного токаПлюсы | Минусы |
Приводы обычно дешевле | Моторы обычно дороже |
Приводы выделяют меньше тепла | Двигатели требуют текущего обслуживания |
Диски занимают меньше места | Для двигателей требуется отдельный источник питания на месте |
Работайте лучше, когда требуется высокий крутящий момент на низких скоростях | Пользователи все больше не знакомы с технологией постоянного тока |
Может выдерживать высокие ударные нагрузки |
Плюсы | Минусы |
Двигатели практически не требуют обслуживания | Аппаратное обеспечение привода более сложное |
Приводы имеют лучший коэффициент мощности | Регенерация линии возможна, но добавляет стоимость |
Общая система переменного тока, как правило, более экономична, чем система постоянного тока | Тормозные прерыватели являются опцией, но тратят энергию и увеличивают нагрев |
Может более эффективно запускать двигатели во всем диапазоне скоростей |
Несмотря на эти различия, есть области, в которых приводы постоянного и переменного тока одинаковы. При рассмотрении современных приводов, таких как семейство приводов Siemens Sinamics, приводы как постоянного, так и переменного тока имеют сопоставимые характеристики, облегчающие ввод в эксплуатацию. Кроме того, оба типа привода надежны и относительно не требуют технического обслуживания.
При рассмотрении современных приводов, таких как семейство приводов Siemens Sinamics, приводы как постоянного, так и переменного тока имеют сопоставимые характеристики, облегчающие ввод в эксплуатацию. Кроме того, оба типа привода надежны и относительно не требуют технического обслуживания.
- Сравните относительную площадь каждого диска.
- Сравните требования к входящей мощности.
- Сравните требования к охлаждению.
- Проверьте протоколы связи и возможность взаимодействия с существующими средствами управления технологической линией.
- Со стороны двигателя обратите внимание на площадь основания машины и высоту вала.
- А как насчет скорости? Требуется ли редуктор, поскольку большинство систем постоянного тока имеют прямой привод?
Если цель состоит в том, чтобы получить такой же выходной крутящий момент на валу двигателя, высока вероятность того, что двигатель переменного тока будет занимать больше места, чем эквивалентный номинал постоянного тока. И не все машины переменного тока созданы одинаковыми: иногда асинхронная машина с короткозамкнутым ротором более рентабельна , иногда асинхронная машина с фазным ротором является лучшим выбором, а иногда лучшим выбором является синхронная конструкция. А иногда (хотите верьте, хотите нет) старая машина постоянного тока подходит для применения.
Если существующая система работает (даже плохо), то рекомендуется измерять амперы и вольты во всем рабочем диапазоне системы. Это определит требуемую мощность, а также должно указать, где на кривой двигателя работает машина и как далеко в зону ослабления поля кривой перемещается система. Также необходимо измерять скорость, потому что от этого будет зависеть, какой крутящий момент должна выдавать новая система и на какой скорости. С помощью этой информации можно выбрать подходящий двигатель. Также настало время выбрать способ охлаждения двигателя (герметичный, с принудительной подачей воздуха, водой и т. д.), а также другие варианты двигателя, такие как размещение клеммной коробки на двигателе, термопары для обмоток, подшипников и смазочного масла.
Механические проблемы включают соответствие диаметра вала и высоты вала, для чего могут потребоваться новые муфты или переходные пластины. Кроме того, может потребоваться изготовление оснований двигателя и/или подрамника для установки нового двигателя.
Что касается электрических параметров, необходимо уделить внимание настройке нового привода, поскольку приводы переменного тока могут реагировать намного быстрее, чем приводы постоянного тока, и это может привести к несоответствию времени отклика с существующим оборудованием или другим нестабильностям. Чтобы получить настоящую производительность постоянного тока, вам может потребоваться установить энкодер (обязательно для подъемных устройств). Кроме того, необходимо учитывать правильность прокладки кабелей и заземления, поскольку электрические помехи могут вызвать проблемы с существующим оборудованием, особенно с контрольно-измерительными приборами.
Клиентам рекомендуется заменить существующее оборудование постоянного тока на систему переменного тока, если:
- Срок службы существующего двигателя постоянного тока подходит к концу, он устарел или больше не подлежит ремонту.

- Когда коэффициент мощности и искажения являются проблемой, например, когда двигатель постоянного тока имеет низкий коэффициент мощности при работе ниже базовой скорости, или при уплате штрафа поставщику коммунальных услуг, или при необходимости добавить коррекцию коэффициента мощности, или при наличии IEEE 519 требование.
- Двигатель небольшой, обычно менее 200 л.с., поэтому разница в стоимости становится незначительной, учитывая множество преимуществ, которые дает система переменного тока
- Машина может быть выведена из строя в течение длительного периода времени.
Клиентам рекомендуется модернизировать свои приводы постоянного тока, когда:
- Существующий двигатель постоянного тока находится в приличном состоянии, а запасные части легко доступны
- Существующий двигатель постоянного тока большой, более 1000 л.с. или 690 В, замена привода постоянного тока стоит меньше, чем замена системы переменного тока. двигатель постоянного тока нелегко заменить двигателем переменного тока. Это может быть из-за разной высоты и диаметра вала, сложного положения или труднодоступности компонентов, или если их применение требует особого охлаждения.
- Ситуация требует быстрого обновления с минимальным временем простоя.
 Это может быть из-за разной высоты и диаметра вала, сложного положения или труднодоступности компонентов, или если их применение требует особого охлаждения.
Это может быть из-за разной высоты и диаметра вала, сложного положения или труднодоступности компонентов, или если их применение требует особого охлаждения.Рассматриваете возможность замены оборудования постоянного тока на оборудование переменного тока и у вас есть вопросы по поводу вашего решения?
Вас также может заинтересовать следующая информация:
- 5 общих терминов, которые следует знать о преобразователях частоты
- Тенденция к интегрированной безопасности в приводах переменного тока
что нужно знать
You are here: Home / New Articles / Основы синхронного двигателя: что нужно знать
Автор: Дэвид Херрес 5 комментариев
Вращающиеся электродвигатели включают взаимодействие двух магнитных полей, статора и ротора. В щеточном двигателе постоянного тока постоянное напряжение прикладывается к статору, создавая стационарное магнитное поле. Постоянный ток также подается на коммутатор, прикрепленный к якорю, входящему в состав ротора. Поскольку коммутатор сегментирован, полярность тока, подаваемого на обмотку ротора, периодически меняется на противоположную. В результате полярность магнитного поля, связанного с ротором, также меняется на противоположную.
В щеточном двигателе постоянного тока постоянное напряжение прикладывается к статору, создавая стационарное магнитное поле. Постоянный ток также подается на коммутатор, прикрепленный к якорю, входящему в состав ротора. Поскольку коммутатор сегментирован, полярность тока, подаваемого на обмотку ротора, периодически меняется на противоположную. В результате полярность магнитного поля, связанного с ротором, также меняется на противоположную.
Постоянное чередование одного магнитного поля по отношению к другому вызывает вращение. Пульсирующее поле может быть связано либо со статором, либо с ротором, тогда как другое поле является статичным. Статическое поле может создаваться постоянными магнитами или постоянным напряжением. Вы могли бы установить батареи на ротор, но никто бы этого не сделал. Вместо того, чтобы создаваться коммутатором, который является частью ротора, коммутация может быть внешней, от электронного или механического контроллера.
Другой вариант — позволить утилите сделать всю работу. Электроснабжение большей части мира осуществляется переменным током с частотой 50 или 60 Гц. При просмотре через осциллограф это достаточно чистая синусоида, являющаяся следствием вращательного характера генерирующего оборудования.
Электроснабжение большей части мира осуществляется переменным током с частотой 50 или 60 Гц. При просмотре через осциллограф это достаточно чистая синусоида, являющаяся следствием вращательного характера генерирующего оборудования.
Если этот источник переменного тока подается на катушки статора, создается вращающееся магнитное поле. Ротор может иметь постоянные магниты или обмотки, питаемые выпрямленным постоянным током, питаемым через щетку и токосъемное кольцо.
Скорость вращения поля статора называется синхронной скоростью. Частота источника питания и число полюсов машины определяют синхронную скорость. Синхронный двигатель — это двигатель, в котором ротор вращается с той же скоростью, что и вращающееся магнитное поле в статоре. Шаговые двигатели, бесщеточные двигатели постоянного тока, двигатели с переменным сопротивлением, двигатели с переключаемым сопротивлением и гистерезисом, а также щеточные двигатели постоянного тока обычно работают как синхронные двигатели.
Название «синхронный» для двигателей происходит от того факта, что ротор движется синхронно с магнитным полем статора, создаваемым при последовательном включении статорных обмоток. В этом примере вал двигателя вращается против часовой стрелки, следуя за полями.
В этом примере вал двигателя вращается против часовой стрелки, следуя за полями.Напротив, асинхронный двигатель — это двигатель, в котором скорость вращения ротора меньше скорости синхронной. Асинхронные двигатели являются асинхронными двигателями. В асинхронном двигателе изменяющееся магнитное поле индуцирует токи в роторе, поэтому ротор всегда будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре. Разница между этими двумя скоростями называется «скольжением» и обычно выражается в процентах от синхронной скорости.
Существует множество разновидностей синхронных двигателей, но во всех случаях их роторы вращаются с синхронной скоростью статора. Возможно, наиболее широко используемым синхронным двигателем является бесщеточный двигатель постоянного тока. Его статор напоминает асинхронный двигатель, но ротор состоит из постоянных магнитов, а не из токопроводящих стержней.
Небольшие синхронные двигатели переменного тока служат в часах и таймерах.