Three.js
.isVector3
Свойство используется для проверки, является ли данный класс и производные от него классы трехмерными векторами (Vector3). Значением по умолчанию является
true.
Не изменяйте это свойство, так как оно используется для оптимизации внутри three.js.
.x
.y
.z
.add( v )
Метод добавляет к данному вектору вектор
v.
.addScalar( s )
Метод добавляет скалярное значение
sк значениям данного вектора
x,
yи
z.
.addScaledVector( v, s )
Добавляет к данному вектору множество из вектора (
v) и скаляра (
).
.addVectors( a, b )
Устанавливает данный вектор как сумму векторов
a + b.
.angleTo( v )
Метод возвращает угол в радианах между данным вектором и вектором, указанном в параметре
v.
.applyAxisAngle( axis, angle )
axis — нормализованный вектор Vector3.
angle — угол в радианах.
Метод применяет к данному вектору поворот, определяемый осями (параметр
axis) и углом (параметр
angle.applyEuler( euler )
Метод конвертирует угол Эйлера, заданный в параметре
euler, в кватернион и применяет его к данному вектору.
.applyMatrix3( m )
Метод умножает данный вектор на матрицу, указанную в параметре
m.
.applyMatrix4( m )
Перемножает данный вектор (с подразумеваемой
1в четвертом измерении) с матрицей
и делит согласно перспективы.
.applyQuaternion( quaternion )
Метод перемножает данный вектор с кватернионом, переданным в аргументе
quaternion.
.ceil( )
Компоненты вектора
x,
yи
zокругляются вверх до ближайшего целочисленного значения.
.clamp( min, max )
min — минимальные значения x, y и z в желаемом диапазоне.
max — максимальные значения x, y и z в желаемом диапазоне.
Если значение
x,
yили
zданного вектора больше значения
x,
yили
zвектора, указанного в параметре
max, оно заменяется этим соответствующим значением.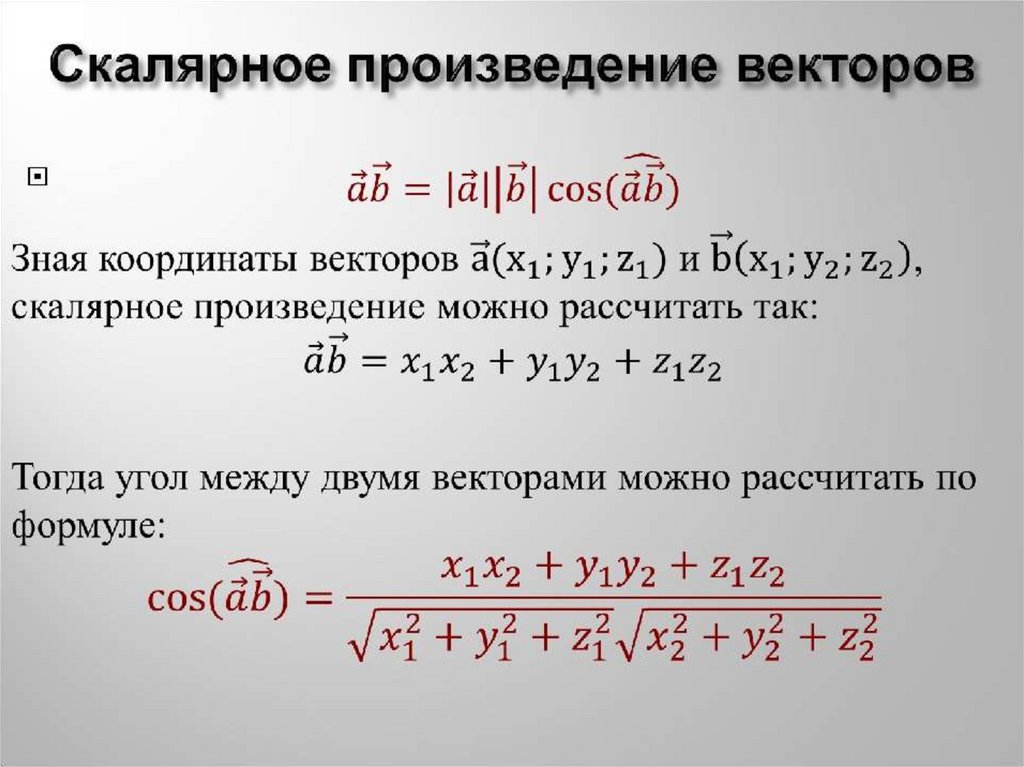
Если значение
,
yили
z,
yили
zвектора, указанного в параметре
min, оно заменяется этим соответствующим значением.
.clampLength( min, max )
min — минимальное значение длины, на котором она будет зафиксирована (зажата).
max — максимальное значение длины, на котором она будет зафиксирована (зажата).
Если длина данного вектора больше значения, указанного в параметре
max, она заменяется на значение
max.
Если длина данного вектора меньше значения, указанного в параметре
, она заменяется на значение
min.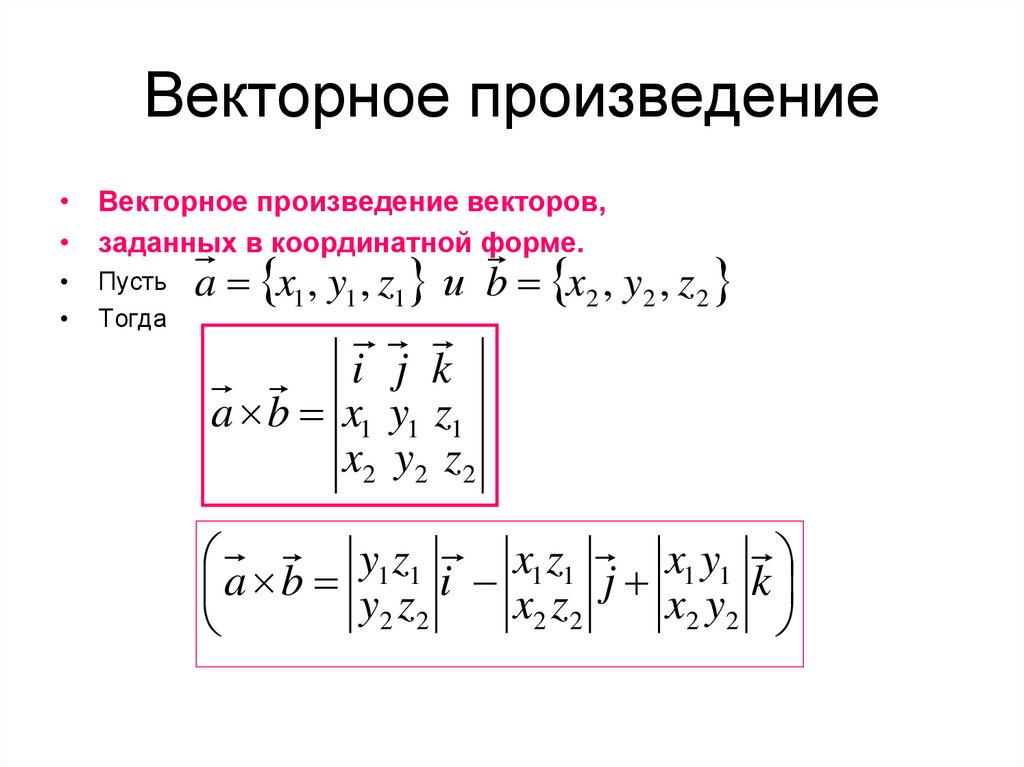
.clampScalar( min, max )
min — минимальное значение компонентов, на котором они будут зафиксированы (зажаты).
max — максимальное значение компонентов, на котором они будут зафиксированы (зажаты).
Если значение
x,
yили
zданного вектора больше значения, указанного в параметре
, оно заменяется на значение
max.
Если значение
,
yили
zданного вектора меньше значения, указанного в параметре
min, оно заменяется на значение
min.
.clone( )
Возвращает новый Vector3 с такими же значениями
x,
yи
z, что и у данного вектора.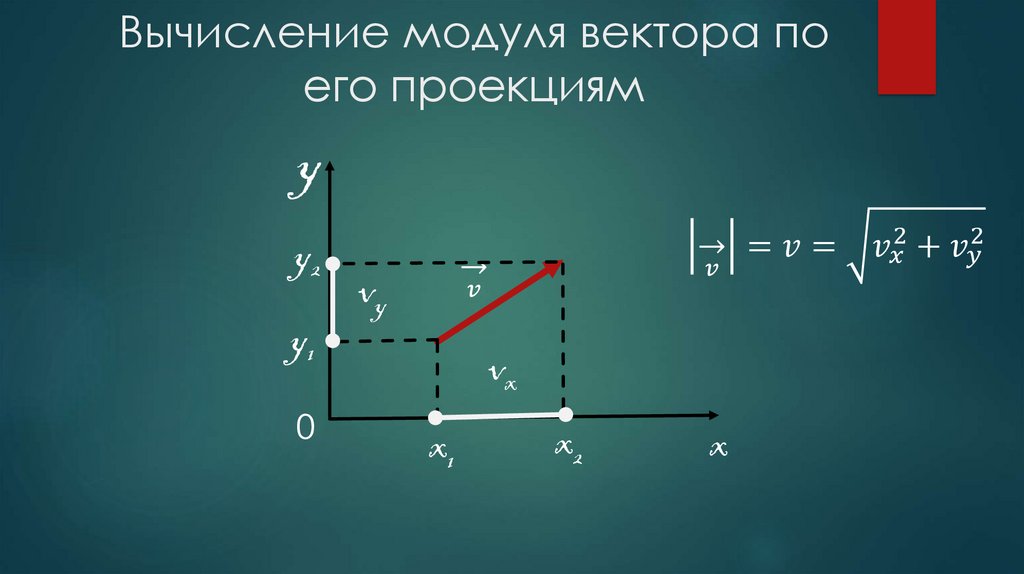
.copy( v )
Копирует значения свойств
x,
yи
zиз вектора, переданного в параметре
v, в данный трехмерный вектор.
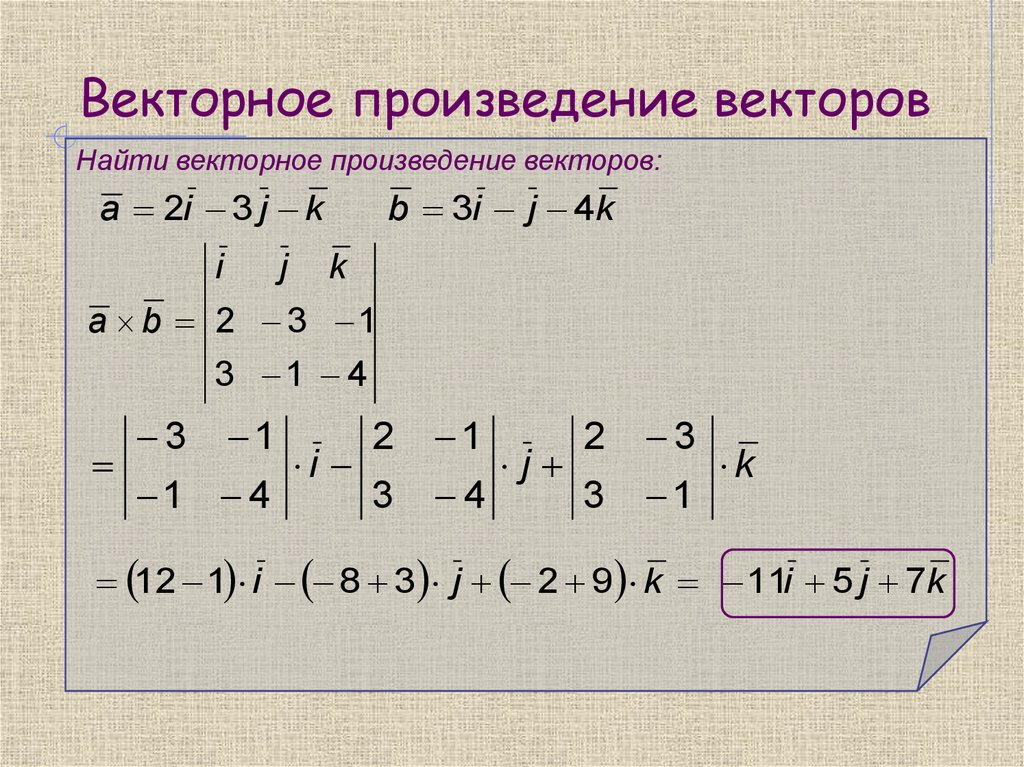
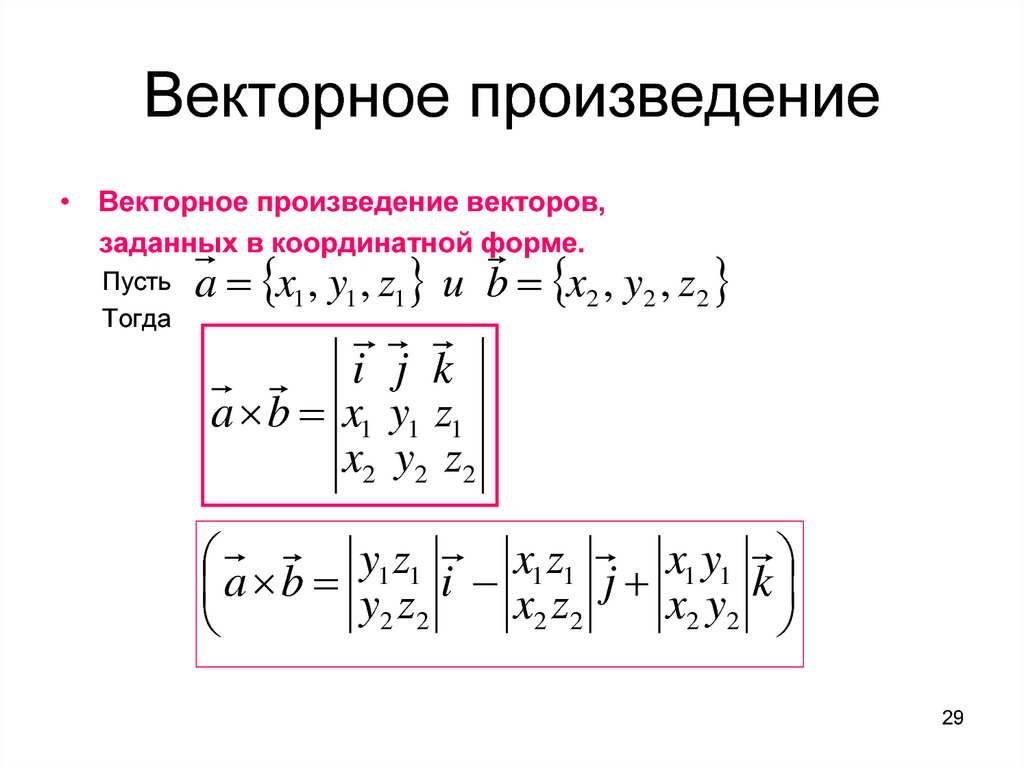
.cross( v )
Метод устанавливает данный вектор как векторное произведение (в англоязычном варианте это cross product) самого себя и вектора, указанного в параметре
v.
.crossVectors( a, b )
Устанавливает данный вектор как векторное произведение (в англоязычном варианте это cross product) векторов, указанных в параметрах
aи
b.
.distanceTo( v )
Метод вычисляет расстояние от данного вектора до вектора, указанного в параметре
v.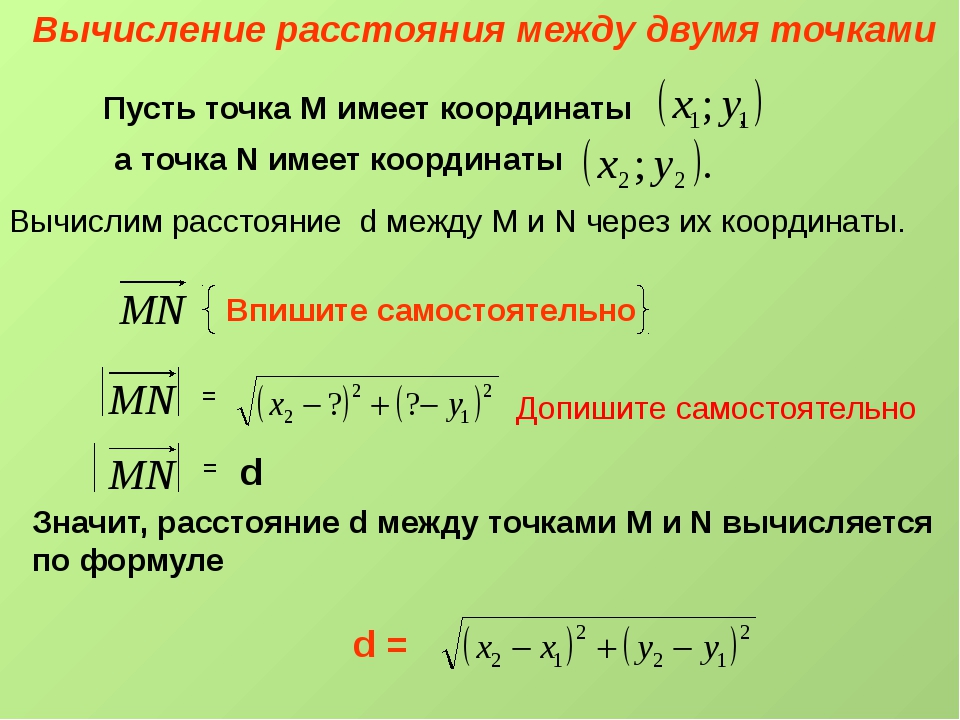
.distanceToManhattan( v )
Метод вычисляет манхэттенское расстояние (Manhattan length) от данного вектора до вектора, указанного в параметре
.
.distanceToSquared( v )
Вычисляет квадрат расстояния от данного вектора до вектора, указанного в параметре
v. При простом сравнении одного расстояния с другим взамен следует сравнивать именно квадраты расстояний, так как это вычисление несколько более эффективно.
Примечание переводчика: Вычисление расстояния методом distanceTo это вычисление квадратного корня из результата, полученного методом distanceToSquared.
.divide( v )
Метод делит данный вектор на вектор, указанный в параметре
.
.divideScalar( s )
Делит данный вектор на скалярное значение
s. Если значение скаляра равно нулю (
Если значение скаляра равно нулю (
), вектор устанавливается как
(0, 0, 0).
.dot( v )
Метод вычисляет скалярное произведение (dot product) данного вектора и вектора, переданного в параметре
v.
.equals( v )
.
.floor( )
Этим методом компоненты вектора округляются вниз, до ближайшего целочисленного значения.
.fromArray ( array, offset )
array — исходный массив в виде [x, y, z, w].
offset — смещение массива (дополнительный, необязательный параметр). Значение по умолчанию равно 0.
Метод устанавливает для данного вектора значение
xравное
array[ offset + 0 ], значение
yравное
и значение
zравное
array[ offset + 2 ].
.fromBufferAttribute( attribute, index )
attribute — исходный атрибут.
index — индекс в атрибуте.
Устанавливает значения
x,
yи
zданного вектора из атрибута, указанного в параметре
attribute.
.getComponent( index )
index — целочисленное значение, может быть 0, 1 или 2.
Если индекс равен
0, возвращается значение
x.
Если индекс равен
, возвращается значение
y.
Если индекс равен
, возвращается значение
z.
.length( )
Вычисляет евклидову длину(Euclidean length),
т. е. расстояние по прямой линии, от точки начала координат
е. расстояние по прямой линии, от точки начала координат
до точки с заданными координатами
(x, y, z).
.lengthManhattan( )
Метод вычисляет манхэттенское расстояние (Manhattan length) данного вектора.
.lengthSq( )
Метод вычисляет квадрат евклидовой длины(Euclidean length), т.е. квадрат расстояния по прямой линии, от точки начала координат
(0, 0, 0)до точки с заданными координатами
(x, y, z). При сравнении длин векторов, взамен сравнения длин, следует сравнивать квадраты длины, так как для расчета это несколько более эффективно.
Примечание переводчика: Вычисление длины вектора методом length это вычисление квадратного корня из результата, полученного методом lengthSq.
.lerp( v, alpha )
v — трехмерный вектор (Vector3), до которого будет проводится операция интерполирования.
alpha — коэффициент интерполяции в закрытом интервале [0, 1].
Метод выполняет операцию линейного интерполирования между данным вектором и вектором, переданным в параметре
v, с коэффициентом интерполяции
alpha, причем
alphaможно рассматривать как расстояние вдоль линии соединения этих двух векторов — при
alpha = 0, он будет равен данному вектору, а при
alpha = 1— вектору
v.
.lerpVectors( v1, v2, alpha )
v1 — начальный трехмерный вектор (Vector3).
v2 — трехмерный вектор (Vector3), до которого будет проводится операция интерполирования.
alpha — коэффициент интерполяции в закрытом интервале [0, 1].
Метод устанавливает данный вектор как линейно интерполированный вектор между векторами
v1и
v2, и где
alpha— это расстояние вдоль линии соединения этих двух векторов — при
alpha = 0, он будет равен вектору
v1, при
alpha = 1— вектору
v2.
.max( v )
Если значение
x,
yили
zданного вектора меньше значения
x,
yили
zвектора, переданного в параметре
v, то это значение заменяется соответствующим значением вектора
v.
.min( v )
Если значение
x,
yили
zданного вектора больше значения
x,
yили
zвектора, переданного в параметре
v, то это значение заменяется соответствующим значением вектора
v.
.multiply( v )
Метод умножает данный вектор на вектор, указанный в параметре
v.
.multiplyScalar( s )
Метод умножает данный вектор на скаляр, переданный в параметре
s.
.multiplyVectors( a, b )
Устанавливает данный вектор равным произведению
a × b.
.negate( )
Метод инвертирует данный вектор, т.е. устанавливает
x = -x,
y = -yи
z = -z.
.normalize( )
Метод преобразовывает данный вектор в единичный вектор (unit vector) — то есть, направление его остается тем же самым, а длина вектора (
length) устанавливается равной
1.
.project( camera )
camera — камера, используемая в проекции.
Метод проецирует вектор на камеру.
.projectOnPlane( planeNormal )
planeNormal — вектор, представляющий нормаль к плоскости.
Метод проецирует данный вектор на плоскость путем вычитания из данного вектора проекции данного вектора на нормаль к этой плоскости.
.projectOnVector( Vector3 )
Метод проецирует данный вектор на другой вектор (параметр
Vector3).
.reflect( normal )
normal — нормаль (перпендикуляр) к плоскости отражения.
Метод отражает вектор от плоскости, перпендикулярной (ортогональной) к нормали (параметр
normal). Предполагается что нормаль имеет единичную длину.
.round( )
Метод округляет компоненты вектора до ближайшего целочисленного значения.
.roundToZero( )
Метод округляет компоненты вектора к нулю (если значение отрицательно — происходит округление вверх, если положительное — вниз) до целочисленного значения.
.set( x, y, z )
Устанавливает компоненты
x,
yи
zданного вектора.
.setComponent( index, value )
index — целочисленное значение, может быть 0, 1 или 2.
value — число с плавающей запятой.
Если индекс равен
0, устанавливается значение
x.
Если индекс равен
, устанавливается значение
y.
Если индекс равен
, устанавливается значение
z.
.setFromCylindrical( c )
Метод устанавливает данный вектор из координат в цилиндрической системе, переданных в
c.
.setFromMatrixColumn( matrix, index )
Устанавливает компоненты
x,
yи
zданного вектора равными колонке матрицы (аргумент
matrix), определяемой по индексу (
index).
.setFromMatrixPosition( m )
Метод устанавливает данный вектор равным элементам положения матрицы преобразования, переданной в аргументе
m.
.setFromMatrixScale( m )
Метод устанавливает данный вектор равным элементам масштабирования матрицы преобразования, переданной в аргументе
m.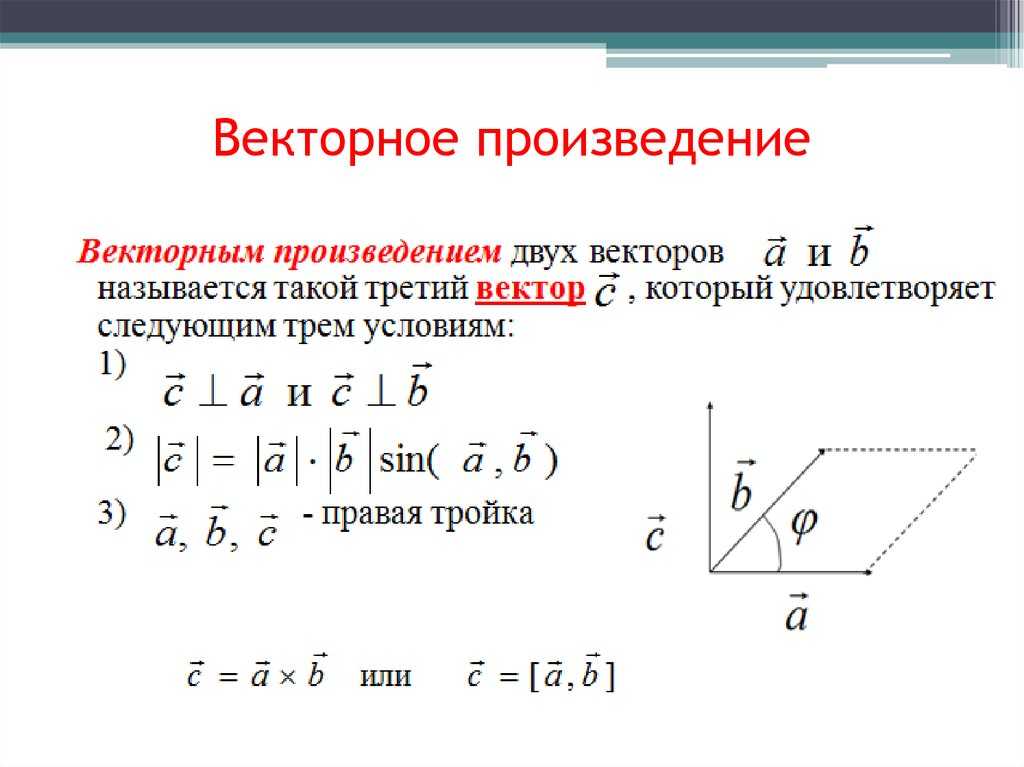
.setFromSpherical( s )
Метод устанавливает данный вектор из координат в сферической системе, переданных в
s.
.setLength( l )
Метод устанавливает данный вектор как вектор с тем же самым направлением, но длиной (
length) равной значению, переданному в
l.
.setScalar( scalar )
Устанавливает значения компонентов
x,
yи
zданного вектора равными скалярному значению, указанному в параметре
scalar.
.setX( x )
Метод заменяет значение
xданного вектора на значение, переданное в параметре
x.
.setY( y )
Метод заменяет значение
yданного вектора на значение, переданное в параметре
y.
.setZ( z )
Метод заменяет значение
zданного вектора на значение, переданное в параметре
z.
.sub ( v )
Метод вычитает из данного вектора вектор, указанный в параметре
v.
.subScalar( s )
Метод вычитает из компонентов
x,
yи
zданного вектора скалярное значение, указанное в параметре
s.
.subVectors( a, b )
Метод устанавливает данный вектор как разность векторов
a — b.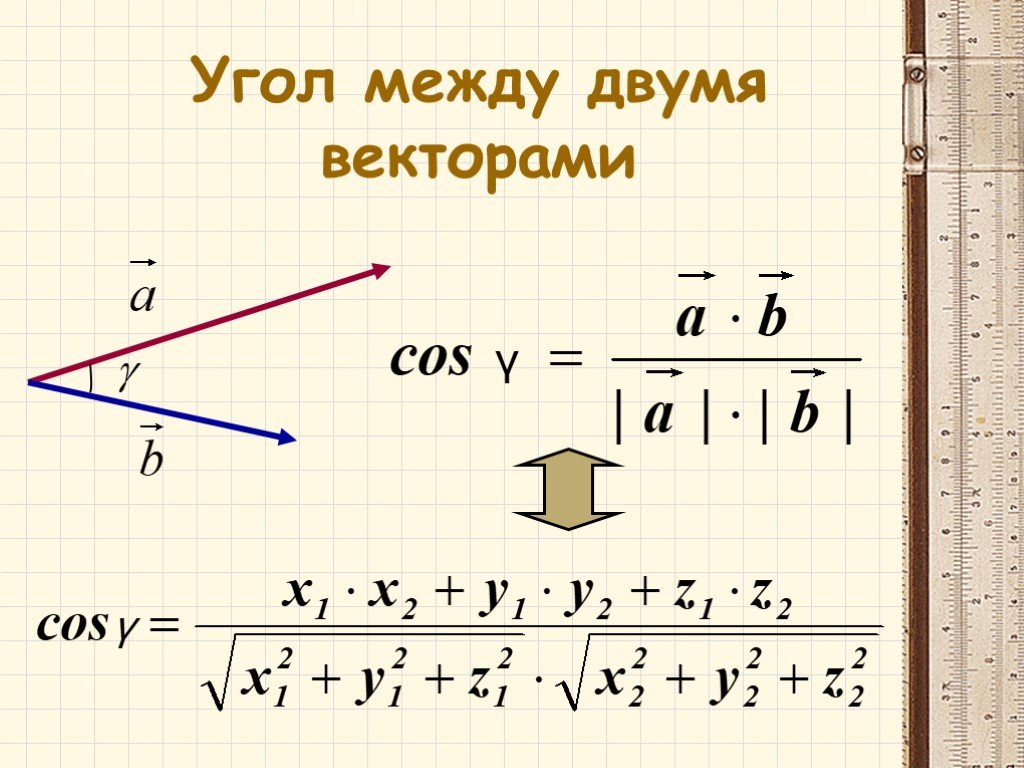
.toArray( array, offset )
array — дополнительный, необязательный массив для хранения вектора. Если он не предоставлен, создается новый массив.
offset — дополнительное, необязательное смещение в массиве.
Возвращает массив в виде
[x, y, z], или копирует
x,
yи
zв предоставленный (
array) массив.
.transformDirection( m )
Метод изменяет данный вектор на матрицу (набор
3 × 3вверху слева в матрице, переданной в параметре
m) и затем нормализует результат.
.unproject( camera )
camera — камера, используемая в проекции.
Отменяет проецирование вектора на проекционную матрицу камеры.
Алгоритм вектора ориентации устройства | Microsoft Learn
Twitter LinkedIn Facebook Адрес электронной почты
- Статья
- Чтение занимает 2 мин
В этой статье описывается алгоритм, используемый пакетом Windows Hardware Lab Kit (Windows HLK) для определения различий между полученным и ожидаемым вектором для точности данных 9 осей в расширенных тестах датчика ориентации. Тесты проверяют правильность интеграции датчиков и правильность интеграции всех датчиков, необходимых для слияния датчиков.
Тесты проверяют правильность интеграции датчиков и правильность интеграции всех датчиков, необходимых для слияния датчиков.
Примечание
В некоторых случаях вы можете использовать средство диагностики датчиков для проверки трехмерного инклинометра и агрегированного датчика ориентации устройства, который находится в тестируемом режиме.
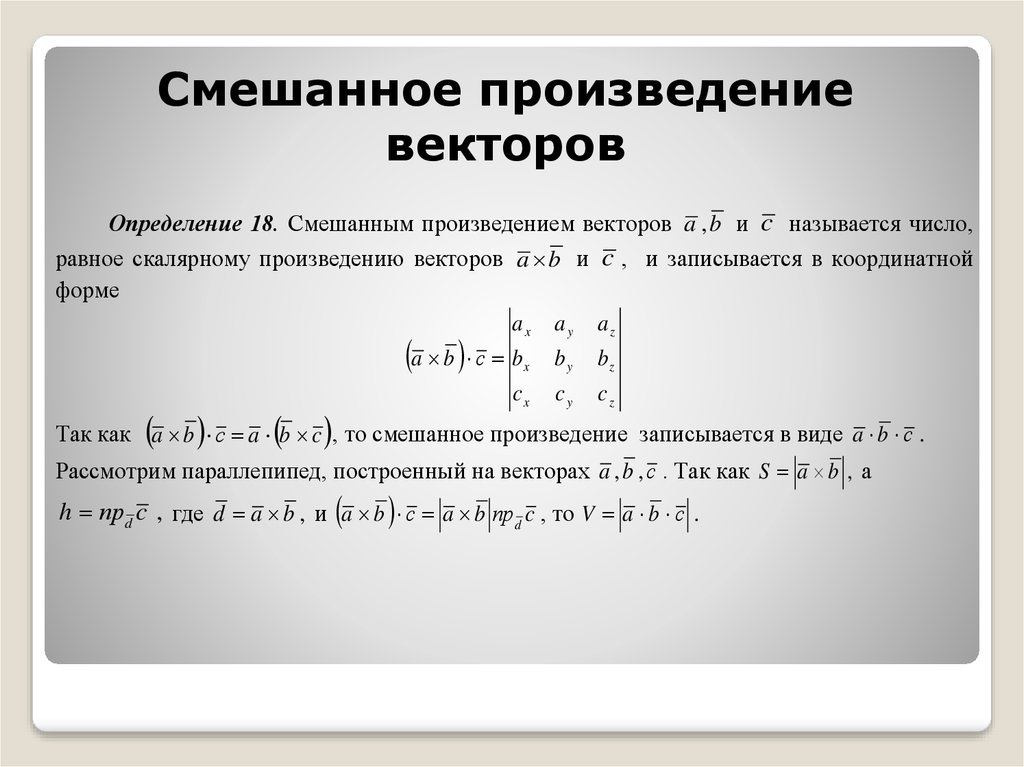
Алгоритм вектора кватерниона
Алгоритм использует дугу 4-точечный продукт двух векторов, разделенный на произведение величины двух векторов и разделенный на 2. Этот алгоритм показан на рисунке 1 Формула векторного алгоритма кватерниона:
Матричные значения поворота преобразуются в значения кватерниона для проверки точности. Вычисляемый вектор кватерниона должен отклоняться не более +/- 5 градусов от ожидаемого вектора кватерниона (допуска по сравнению с угловой формой между векторами кватерниона) (точность **+/- 10 градусов, разрешенная в направлении оси заголовка). Тест Windows HLK позволяет использовать дельту Øt до 15 градусов.
Вычисление угла дельта между полученными и ожидаемыми векторами Кватерниона
В этом разделе описывается вычисление, вычисляющее угол дельты между полученными и ожидаемыми векторами кватерниона в расширенных тестах ориентации в Windows HLK.
Следующие два значения данных представляют интерес к отчету об агрегированном датчике ориентации устройства:
Вектор кватерниона
Матрица поворота
Тест состоит из следующих двух проверок:
Проверка полученного вектора Quaternion в отчете о данных датчика. Вектор Quaternion имеет форму (xi + yj + zk + w).
Ожидается, что значение w всегда будет положительным.
Ожидается, что вектор кватерниона будет нормализован и ненулевым. Например, величина вектора должна быть близка к 1,0. Для округления ошибок в расчете величины предоставляется один процент (1%) литерал.
Разностный угол вычисляется с помощью delta = 2 * Acos( Exp.
 Rec ) / ( | Exp | * | Rec | ) ), где:
Rec ) / ( | Exp | * | Rec | ) ), где:\* указывает скалярное умножение.
. indicates dot product
Exp — ожидаемый вектор Quternion
Rec — полученный вектор Кватерниона
| Q | указывает величину вектора квтерниона.
дельта — угол в градусах
Если дельта больше 360 градусов, дельта вычисляется повторно как delta = delta — 360.
На этом этапе разностное значение должно быть меньше или равно допустимому значению погрешности; например, 10 градусов.
Проверка полученной матрицы поворота. Ожидается, что матрица поворота будет матрицей 3×3.
Каждый столбец и вектор строки матрицы поворота должен быть нормализован и ненулевым. Для округления ошибок в расчете величины предоставляется один процент (1).
Полученная матрица поворота преобразуется в вектор кватерниона.
Все шаги от <a> до <e> проверки (1) используются повторно.
 Rec ) / ( | Exp | * | Rec | ) ), где:
Rec ) / ( | Exp | * | Rec | ) ), где: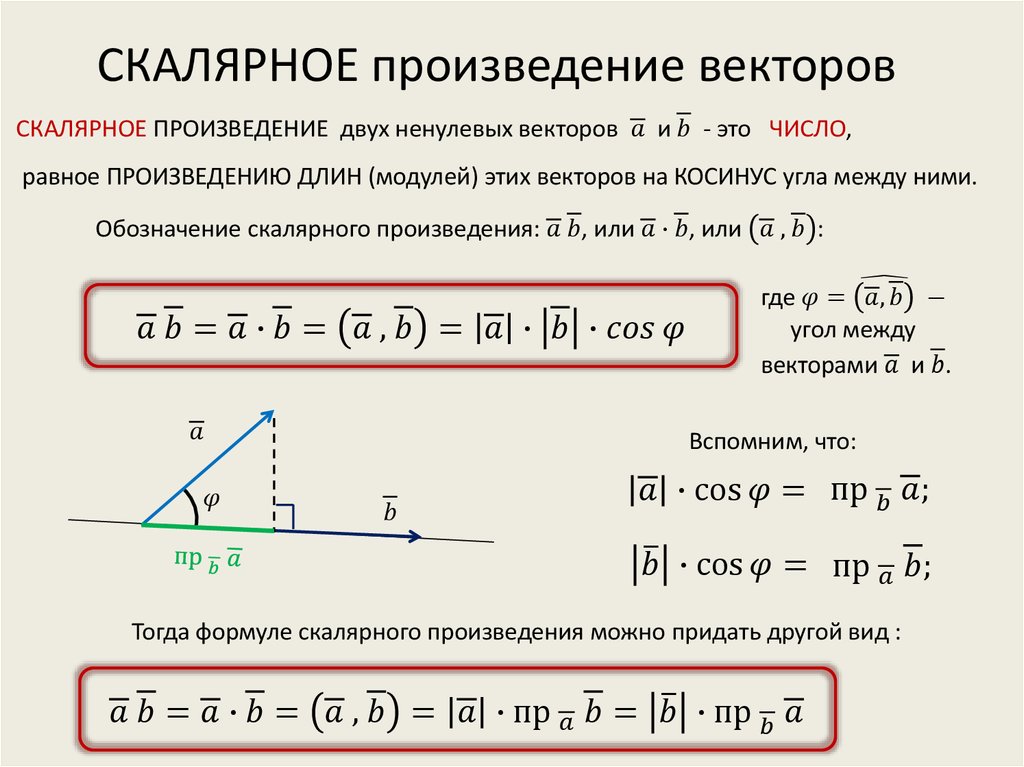
Тестирование функциональных возможностей датчика с помощью средства диагностики датчиков
Интеграция датчиков движения и ориентации
2 }\\ d = \sqrt{ 11 } \end{align}Следовательно, расстояние между точками $P$ и $Q$ равно $\sqrt{11}$.
Предположим, что у нас есть вектор $\vec{u}$. Если этот вектор умножить на скаляр $k$, то норма вектора $k\vec{u}$ будет в k раз больше, чем $k$. Однако есть проблема. Мы определяем норму как величину или длину вектора, поэтому норма должна быть положительной. Отсюда получаем следующее соотношение:
(4)
\begin{align} \| к \vec{u} \| = \ середина к \ середина \ | \vec{и} \| \end{выравнивание}
Заметим, что $\mid k \mid$ представляет абсолютное значение k , то есть:
(5)
\begin{align} \mid k \mid = \left\{\begin{matrix} k & \mathrm{if \: k >0}\\ -k & \mathrm{if \: k < 0} \ конец{матрица}\справа.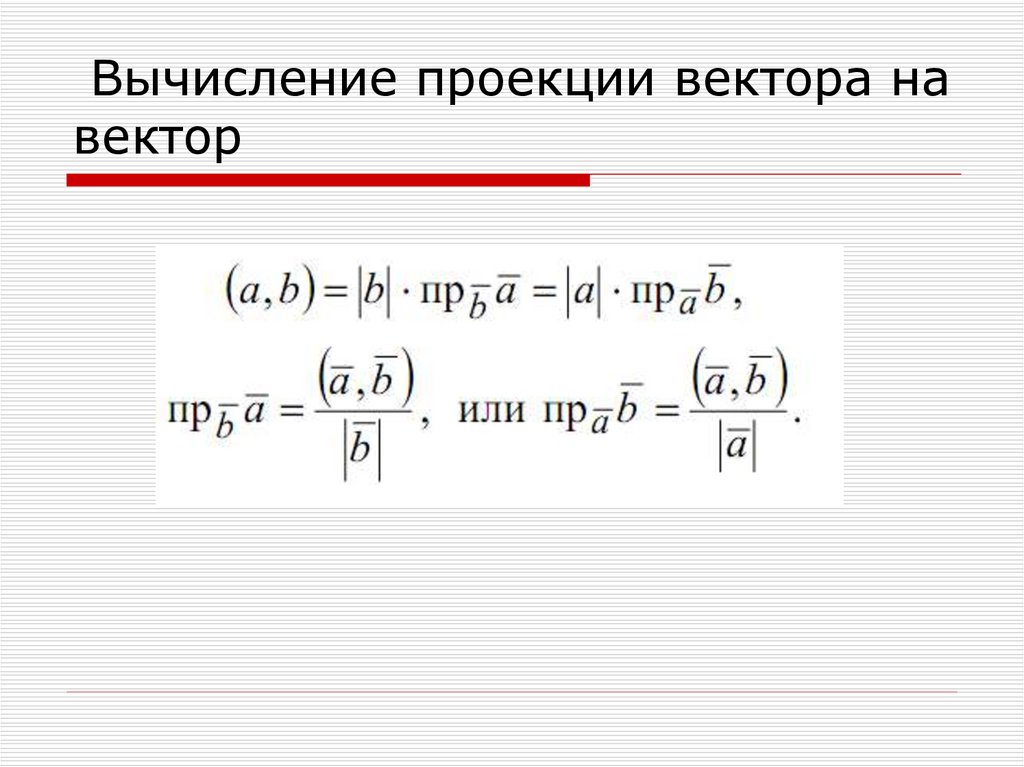 \end{align}
\end{align}
Таким образом, если $k$ отрицательное, то мы берем положительное значение $k$, иначе $k$ остается прежним. Например, $\mid -3 \mid = 3$. Обратите внимание, что иногда для обозначения абсолютного значения будет использоваться обозначение $\mathrm{abs} (k)$.
Из этого мы можем вывести соотношение между скалярным множителем вектора и его нормой, то есть:
(6)
\begin{align} \| к \vec{u} \| = \ середина к \ середина \ | \vec{и} \| \end{align}
Пример 4
Учитывая, что $\| \vec{и} \| = 4$, найти $\| -3\vec{u} \|$.
Из приведенной формулы заметим, что $\| -3 \vec{u} \| = \середина -3 \середина \| \vec{и} \| = (3)(4) = 12$.
Как рассчитать единичный вектор?
Физические величины делятся на два типа: «векторные» и «скалярные». Термин «вектор» относится к физической величине, которая имеет как величину, так и направление. Это физические величины, которые подчиняются треугольному закону сложения векторов.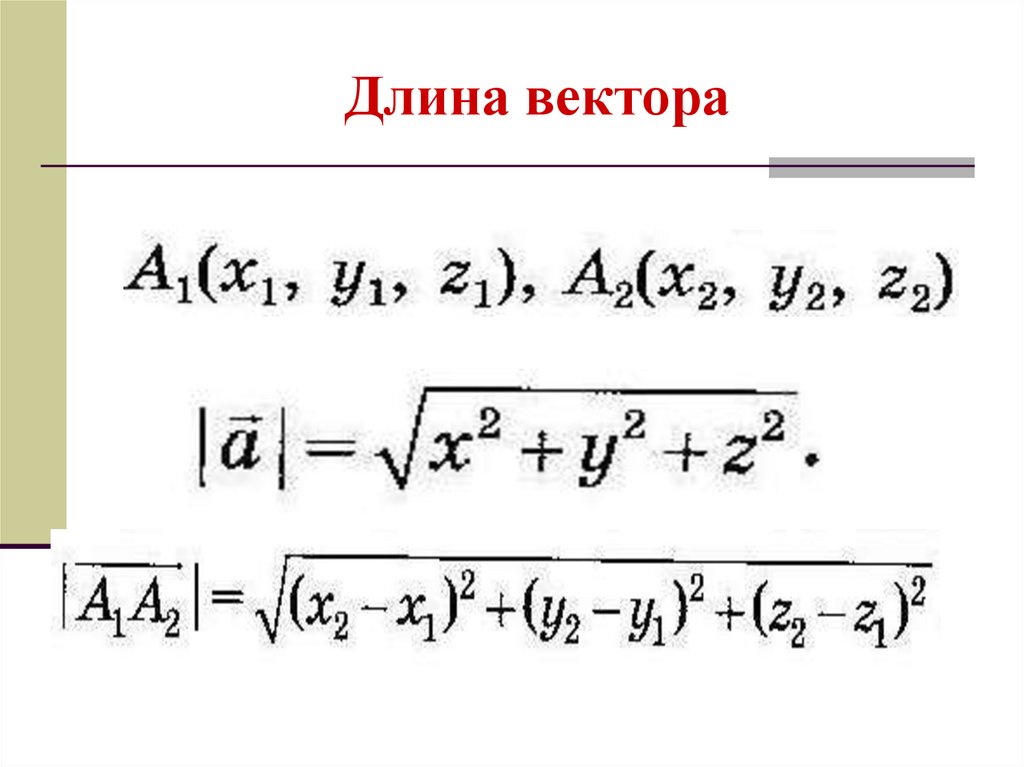 Некоторыми примерами векторных величин являются электрическое поле, смещение, импульс, скорость, сила и ускорение. Все эти величины имеют как величину, так и направление. С другой стороны, «скалярные» величины имеют только величину. Некоторыми примерами скалярных величин являются расстояние, длина, объем, температура и площадь.
Некоторыми примерами векторных величин являются электрическое поле, смещение, импульс, скорость, сила и ускорение. Все эти величины имеют как величину, так и направление. С другой стороны, «скалярные» величины имеют только величину. Некоторыми примерами скалярных величин являются расстояние, длина, объем, температура и площадь.
Типы векторов
- Равные векторы: Векторы, имеющие одинаковую величину и одинаковое направление, называются равными векторами.
- Коллинеарные векторы: Векторы, направленные либо в одном, либо в противоположном направлении друг другу, называются коллинеарными векторами.
- Параллельные векторы: Параллельные векторы также известны как подобные векторы . Коллинеарные векторы с одинаковыми направлениями называются параллельными векторами. Угол между этими векторами равен нулю.
- Антипараллельные векторы: Антипараллельные векторы также известны как непохожие векторы. Коллинеарные векторы с противоположными направлениями называются антипараллельными векторами. Угол между этими векторами 180°.
- Копланарные векторы: Все векторы, лежащие в одной плоскости, называются копланарными векторами.
- Нулевые векторы: Вектор с одинаковыми начальной и конечной точками называется нулевым вектором. Его также называют .Нулевой вектор . Величина такого вектора равна 0, а его направление неопределенно.
 Коллинеарные векторы с противоположными направлениями называются антипараллельными векторами. Угол между этими векторами 180°.
Коллинеарные векторы с противоположными направлениями называются антипараллельными векторами. Угол между этими векторами 180°.Вычисление единичного вектора
Единичный вектор представляет собой вектор величины 1 и с направлением вдоль заданного вектора. Он представляет направление данного вектора. Единичный вектор вектора находится путем деления вектора на его модуль. Модуль вектора — это величина вектора.
Он представлен символом ‘ ‘(шляпа или кепка) над переменной как и определяется как,
Где |А| — модуль вектора A, а для вектора |A| определяется как,
Таким образом, для вектора единичный вектор определяется как,
.
 Найдите .
Найдите . Решение:
=Модуль вектора,
= = √9
= 3
Вектор единиц,
=
=
=
=
=Проблема 2: Является ли вектор, заданный , также единичным вектором?
Решение:
Модуль вектора,
= = √3
Величина этого вектора не равна 1. Следовательно, это не единичный вектор.
Задача 3. Найдите единичный вектор в направлении .
Решение:
Модуль вектора,
= = √3
Единичный вектор,
=
=
Задача 4. Если — единичный вектор, найдите значение z.
Solution:
Magnitude of a unit vector is 1, which means:
which means,
Squaring both sides,
Question 5: Find единичный вектор .