
§49. Виды сопротивлений в электрической цепи переменного тока
При изучении цепей постоянного тока мы установили, что все проводники обладают электрическим сопротивлением, на преодоление которого затрачивается определенное количество электрической энергии. В цепях переменного тока мы встречаемся с несколькими видами сопротивлений, различающихся своей физической природой. Все эти сопротивления можно подразделить на две
Рис. 174. Условные обозначения основных элементов электрических цепей переменного тока
основные
группы: активные и реактивные. В
активных сопротивлениях при включении
в цепь переменного тока электрическая
энергия преобразуется в тепловую.
Активным сопротивлением R обладают,
например, провода электрических линий,
обмотки электрических машин и аппаратов
и пр., т. е. те же устройства, которые
обладают электрическим сопротивлением
в цепи постоянного тока. В реактивных
сопротивлениях электрическая энергия,
вырабатываемая источниками, не
расходуется. Как будет показано ниже,
Как будет показано ниже,
Реактивное сопротивление создают индуктивности и емкости. Под индуктивностью L будем понимать идеализированный элемент электрической цепи (идеализированную катушку индуктивности), способный запасать энергию в своем магнитном поле, который не имеет активного сопротивления R и емкости С. Аналогично под емкостью С будем понимать идеализированный элемент электрической цепи (идеализированный конденсатор), способный запасать энергию в своем электрическом поле, который не имеет активного сопротивления R и индуктивности L.
При
проведении расчетов реальные катушки
индуктивности и конденсаторы, в которых
имеются потери мощности (из-за наличия
активного сопротивления R), часто могут
быть заменены с некоторым приближением
этими идеализированными элементами,
так как переменный ток, проходящий через
реальную катушку индуктивности при
заданном напряжении и частоте, определяется
в основном ее индуктивностью L, а ток,
проходящий через реальный конденсатор,—его
емкостью С.
Ток
и напряжение. При включении в цепь
переменного тока активного сопротивления
R (рис. 175, а) напряжение и источника
создает в цепи ток i. Если напряжение и
изменяется по синусоидальному закону
i = Iт sin ?t
При этом
Iт = Uт / R
Таким образом, ток и напряжение изменяются по одному и тому же закону; они одновременно достигают своих максимальных значений и одновременно проходят через нуль (рис. 175,б). Следовательно, при включении в цепь переменного тока активного сопротивления ток и напряжение совпадают по фазе
Если обе части равенства Iт = Uт / R разделить на ?2, то получим выражение закона Ома для рассматриваемой цепи для действующих значений напряжения и тока:
I = U / R
Следовательно,
для цепи переменного тока, содержащей
только активное сопротивление, этот
закон имеет такую же математическую
форму, как и для цепи постоянного тока.
Электрическая мощность. Электрическая мощность р в цепи с активным сопротивлением в любой момент времени равна произведению мгновенных значений силы тока i и напряжения и. Следовательно, мгновенная мощность р не является постоянной величиной, как при постоянном токе, а изменяется по кривой (см. рис. 175,б). Эту кривую можно также получить графически, перемножая ординаты кривых силы тока i и напряжения и при различных углах ?t. Изменение мощности происходит с двойной частотой ?t по отношению к изменению тока и напряжения, т. е. один период изменения мощности соответствует половине периода изменения тока и напряжения. Все значения мощности являются положительными. Физически положительное значение мощности означает, что энергия передается от источника электрической энергии к приемнику. Максимальное значение мощности при ?t = 90° и ?t = 270°
Pmax = UтIт = 2UI
Рис. 175. Схема включения в цепь переменного
тока активного сопротивления (а), кривые
тока i, напряжения и, мощности р (б) и
векторная диаграмма (в)
175. Схема включения в цепь переменного
тока активного сопротивления (а), кривые
тока i, напряжения и, мощности р (б) и
векторная диаграмма (в)
Практически об энергии W, создаваемой электрическим током, судят не по максимальной мощности, а по средней мощности Рср = Р, так как эта энергия может быть выражена как произведение среднего значения мощности Р на время протекания тока:
Кривая мгновенной мощности симметрична относительно линии АБ, которая соответствует среднему значению мощности Р. Поэтому
P = Pmax / 2 = UI
Используя формулу (67) закона Ома, активную мощность можно выразить также в виде P = I2R или P=U2/R.
В электротехнике среднюю мощность, потребляемую активным сопротивлением, обычно называют активной мощностью, или просто мощностью, и обозначают буквой Р.
Поверхностный
эффект. Следует отметить, что активное
сопротивление проводников в цепи
переменного тока всегда больше их
сопротивления в цепи постоянного тока.
Рис.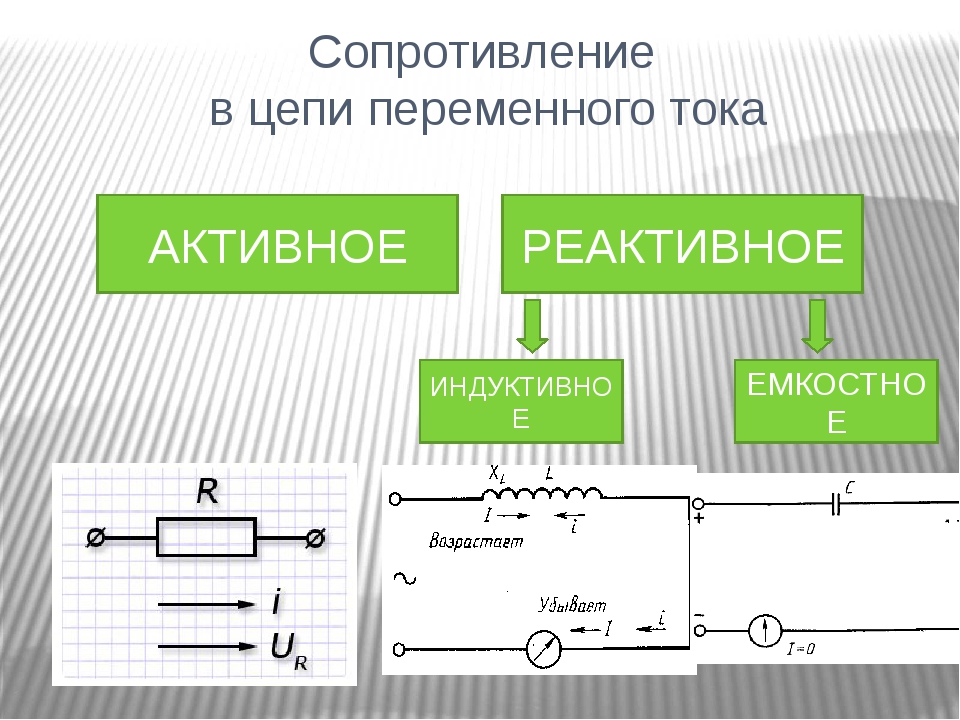 176. Схема протекания постоянного I и
переменного i токов по проводнику (а) и
возникновение поверхностного эффекта
(б)
176. Схема протекания постоянного I и
переменного i токов по проводнику (а) и
возникновение поверхностного эффекта
(б)
Рис. 177. Схема термообработки деталей токами высокой частоты: 1 — высокочастотный индуктор; 2 — закаливаемая деталь; 3 — разогретый слой
тока, последний будет стремиться пройти там, где э. д. с. самоиндукции имеет наименьшее значение, т. е. пройдет преимущественно по поверхностным слоям проводника. В результате этого плотность тока У в поверхностных слоях будет больше, чем во внутренних. Чем больше частота тока, тем больше э. д. с. самоиндукции индуцируется во внутренних слоях проводника и тем в большей степени ток вытесняется на поверхность.
При
частоте 50 Гц увеличение сопротивления
медных и алюминиевых проводников при
малом их диаметре практически ничтожно,
и сопротивление таких проводников в
цепях переменного и постоянного тока
можно считать одинаковым. Но для медных
и алюминиевых проводников диаметром
свыше 10 мм, а для стальных проводников
при еще меньших диаметрах необходимо
при расчетах учитывать влияние
поверхностного эффекта на их активное
сопротивление.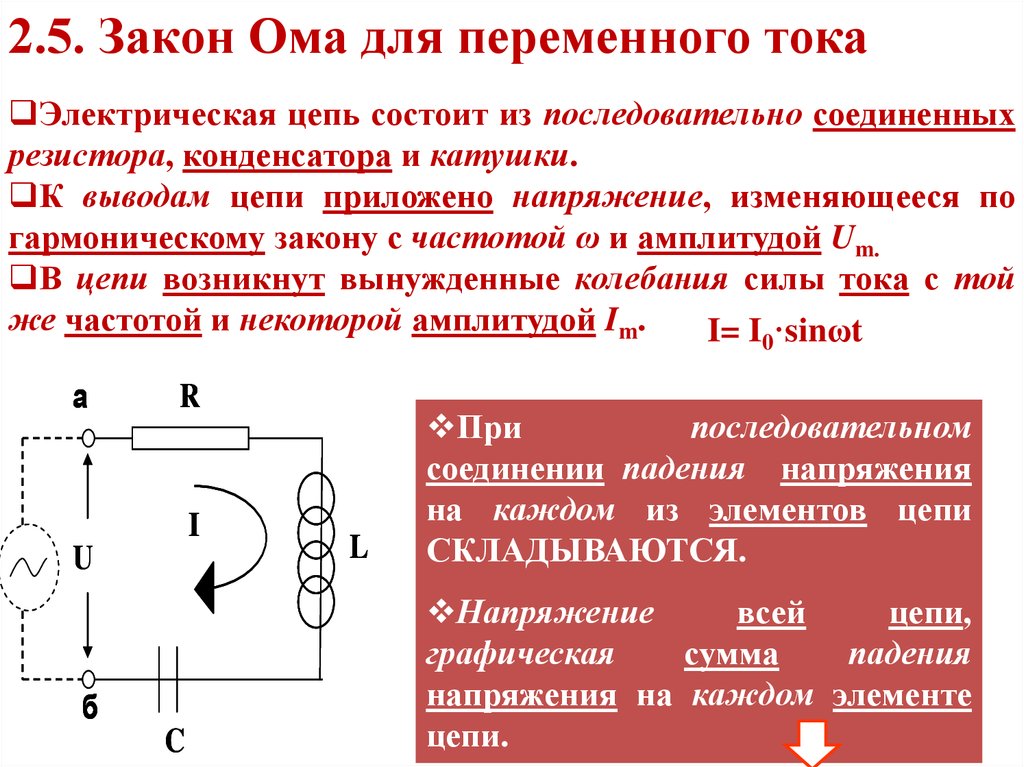
При токах высокой частоты, принятых в радиотехнике, телевидении и различных высокочастотных установках, с целью лучшего использования металла проводников их обычно изготовляют полыми.
На свойстве переменного тока высокой частоты протекать, главным образом, по поверхности проводников основаны различные методы высокочастотной закалки и термообработки. Например, при высокочастотной термообработке деталей вихревыми токами (рис. 177) эти токи индуцируются в основном в поверхностном слое металла. Они быстро разогревают поверхностные слои обрабатываемой детали, раньше, чем ее внутренняя часть успеет заметно нагреться за счет теплопроводности металла.
Виды сопротивлений в цепи переменного тока — Мегаобучалка
В цепях переменного тока сопротивления разделяют на активные и реактивные.
В активных сопротивлениях, включенных в цепь переменного тока, электрическая энергия преобразуется в тепловую, в реактивных сопротивлениях электрическая энергия, вырабатываемая источником, не расходуется.
Если не учитывать взаимное влияние отдельных элементов электрической цепи, то в общем случае электрическая цепь синусоидального тока может быть представлена тремя пассивными элементами: активным сопротивлением R, индуктивностью L и емкостью C.
Электрические машины постоянного тока
Принцип действия генератора постоянного тока.
Упрощенная модель генератора постоянного тока:
между полюсами N и S магнита находится вращающаяся часть генератора — якорь, вал которого механически связан с приводным двигателем.
В двух продольных пазах на сердечнике якоря расположена обмотка в виде одного витка, концы которого присоединены к двум медным изолированным полукольцам, образующих простейший коллектор.
Коллектор – механический преобразователь переменного тока в постоянный и наоборот.
На поверхность коллектора наложены щетки А и В, осуществляющие скользящий контакт с коллектором и связывающие генератор с внешней цепью.
В процессе работы генератора якорь вращается и виток занимает разное пространственное положение, поэтому в витке наводится переменная э. д.с., мгновенное значение которой e=Blvsinα.
д.с., мгновенное значение которой e=Blvsinα.
При замыкании внешней цепи через виток будет протекать синусоидальный ток, который посредством коллектора и щеток преобразуется в пульсирующий ток во внешней цепи, то есть ток неизменный по направлению.
При указанном положении витка направление тока в нем от щетки А к щетке В, при повороте витка на 1800, направление тока в витке измениться на противоположное, однако полярность щеток, а, следовательно, направление тока во внешней цепи останутся неизменными, так как в тот момент, когда ток в витке меняет свое направление, происходит смена коллекторных пластин под щетками. Таким образом под щеткой А всегда находится пластина, соединенная с проводником расположенным под северным полюсом, а под щеткой В — пластина, соединенная с проводником расположенным под южным полюсом. То есть, полярность щеток остается неизменной.
Для ослабления пульсации тока во внешней цепи увеличивают число витков в обмотке якоря при их равномерном распределении по поверхности якоря и соответствующем числе коллекторных пластин.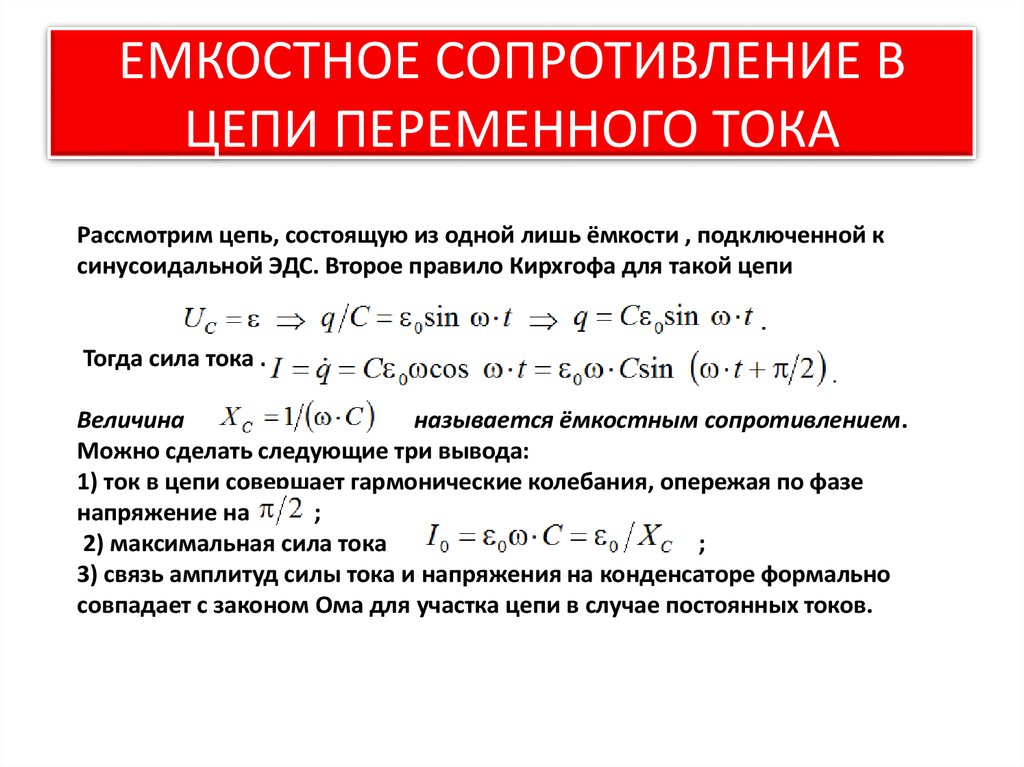 Уже при 16 витках и 16 коллекторных пластинах ток, практически, считается постоянным.
Уже при 16 витках и 16 коллекторных пластинах ток, практически, считается постоянным.
Основные уравнения генератора.
В процессе работы генератора постоянного тока индуцируется э.д.с. Е. При подключении к генератору нагрузки в цепи якоря возникает ток, а на выводах генератора устанавливается напряжение, определяемое уравнением:
U=E-Ia*ΣR.
Якорь генератора приводится во вращение приводным двигателем, который создает на валу генератора вращающий момент М. Если генератор работает на х.х. (I =0),то для вращения его якоря нужен сравнительно небольшой момент х.х. М0. Этот момент обусловлен силами трения и вихревыми токами.
При работе нагруженного генератора в проводах обмотки якоря появляется ток, который, взаимодействуя с магнитным полем возбуждения, создает на якоре тормозной момент Мт.
М=М0+Мт – уравнение моментов для генератора.
Принцип работы двигателя постоянного тока.
В соответствии с принципом обратимости электрических машин упрощенная модель генератора постоянного тока может быть использована в качестве двигателя. Для этого на щетки нужно подать напряжение от источника постоянного тока.
Для этого на щетки нужно подать напряжение от источника постоянного тока.
Например, если на щетку А подать +, а на щетку В -, то в обмотке возникнет ток I. В результате взаимодействия этого тока с магнитным полем возбуждения, появятся электромагнитные силы Fэм, создающие на якоре вращающий момент М.
После поворота якоря на 1800 электромагнитные силы не изменят своего направления, так как одновременно с переходом каждого проводника обмотки якоря из зоны одного магнитного полюса в зону другого полюса, в этих проводниках посредством коллектора и щеток меняется направление тока.
Упрощенная модель не обеспечивает двигателю устойчивой работы, так как при прохождении проводниками обмотки якоря геометрической нейтрали 00|, электромагнитные силы раны нулю (В=0). Однако при увеличении числа проводников обмотки якоря и числа коллекторных пластин вращение якоря двигателя становится устойчивым и равномерным.
Основные уравнения двигателя.
При подключении двигателя постоянного тока к источнику питания, через обмотку возбуждения и обмотку якоря будет протекать ток.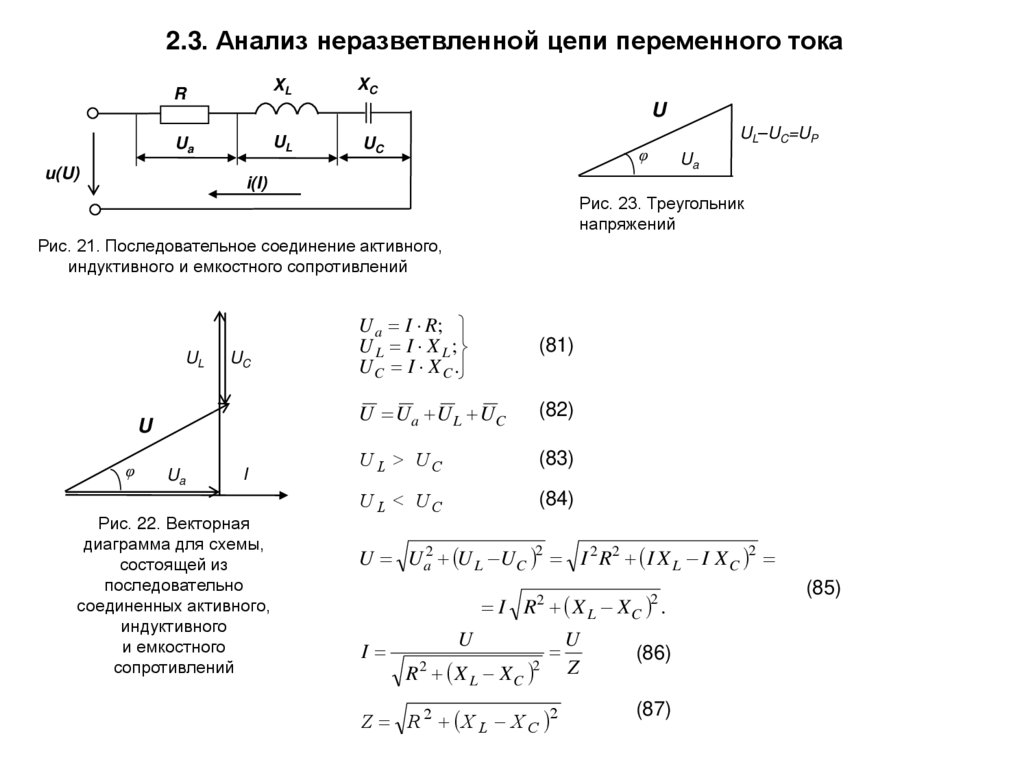 Взаимодействие поля якоря с полем возбуждения создает на якоре электромагнитный момент М, который является вращающим.
Взаимодействие поля якоря с полем возбуждения создает на якоре электромагнитный момент М, который является вращающим.
Вращающий момент определяется по формуле
М=См*Ф*Iа,
где См – коэффициент, зависящий от конструктивных параметров машины.
В процессе работы якорь вращается, в обмотке наводится э.д.с. Еа, которая направлена против тока Iа, поэтому ее называют противо-э.д.с.
Значение противоэ.д.с.
Е=Се* Ф*n, n=Е/Се*Ф,
где Се – конструктивная постоянная для данной машины.
Напряжение, приложенное к зажимам якоря двигателя, должно уравновешивать противо-э.д.с. и компенсировать падение напряжения на внутреннем сопротивлении цепи якоря:
U =E+Ia*ΣR, Е=U-Ia*ΣR, ΣR=Ra+Rд+Rко+Rс+Rщ, где
Ra — сопротивление обмотки якоря; Rд — сопротивление обмотки добавочных полюсов; Rко — сопротивление компенсационной обмотки; Rс — сопротивление последовательной обмотки возбуждения; Rщ — сопротивление переходного щеточного контакта.
Частоту вращения двигателя можно регулировать: изменением магнитного потока, изменяя ток возбуждения; изменением питающего напряжения U; включением добавочного сопротивления в цепь якоря.
Если требуется изменить направление движения двигателя, то необходимо изменить направление электромагнитного момента М, действующего на якорь. Это можно осуществить изменением тока в обмотке якоря Ia или путем изменения направления магнитного потока Ф.
Свойство саморегулирования.
Чтобы двигатель вращался с постоянной частотой n, развиваемый им вращающий мрмент М должен быть равным создаваемому нагрузкой тормозному моменту Мт М=Мт=См*Ф*Iа
Если равенство нарушается, то частота вращения увеличивается или уменьшается до тех пор пока вращающий момент не будет уравновешен тормозным.
Электрические машины переменного тока
Электрические машины переменного тока могут быть однофазными и многофазными. Наиболее широкое распространение нашли синхронные и асинхронные машины, а также коллекторные машины переменного тока.
Синхронные электрические машины
применяются в качестве генераторов и двигателей.
Синхронные двигатели используют для мощных электроприводов, а также для микроприводов в устройствах, требующих поддержания строгого постоянства частоты вращения.
Принцип действия однофазного генератора переменного тока рассмотрен в разделе «Переменный ток». Такие генераторы с вращающимся якорем и неподвижными полюсами применяют только при невысоких напряжениях (380/220 В) и небольших мощностях (до 15 кВА), так как скользящий контакт в машинах большой мощности создает значительные потери мощности.
Наибольшее распространение получили трехфазные генераторы с неподвижным якорем. Обмотка якоря укладывается в пазах статора, а ротор представляет собой электромагнит, к обмотке которого подводится постоянный ток через контактные кольца и щетки. Ротор при этом может быть явнополюсным и неявнополюсным.
В машинах с относительно малой частотой вращения (гидрогенераторы) ротор имеет явно выраженные полюсы, равномерно расположенные по его окружности. Полюс состоит из сердечника, полюсного наконечника и обмотки возбуждения.
Полюс состоит из сердечника, полюсного наконечника и обмотки возбуждения.
Высокоскоростные машины (турбогенераторы) снабжены роторами с неявно выраженными полюсами. Сердечники, которых обычно изготавливаются из цельных поковок, на поверхности которых фрезеруются пазы. После укладки обмоток возбуждения на роторе, пазы его забивают клиньями, а лобовые соединения обмотки возбуждения укрепляют стальными бандажами.
При работе генератора на холостом ходу магнитный поток возбуждения индуцирует в трехфазной обмотке статора э.д.с.
При нагрузке генератора в обмотке статора протекает ток. При симметричной нагрузке токи обмотки статора равны и сдвинуты на 1/3 периода. Токи статора создают вращающееся магнитное поле, частота вращения которого n1=60f/p=n, т.е. магнитное поле, созданное токами в обмотке статора, вращается синхронно с магнитным полем полюсов. Отсюда и название «синхронные».
Для нормальной работы любого приемника электрической энергии требуется постоянное напряжение сети. Регулировать напряжение генератора можно изменением частоты вращения или магнитного потока возбуждения. Для изменения потока возбуждения в цепь обмотки включают регулировочный реостат или автоматический регулятор напряжения (на дизельных или вагонных генераторах).
Регулировать напряжение генератора можно изменением частоты вращения или магнитного потока возбуждения. Для изменения потока возбуждения в цепь обмотки включают регулировочный реостат или автоматический регулятор напряжения (на дизельных или вагонных генераторах).
Асинхронные машины переменного тока
чаще всего используются в качестве двигателей. Принцип действия таких машин основан на использовании вращающегося магнитного поля.
Вращающееся магнитное поле
можно получить с помощью двух одинаковых катушек, питаемых переменным током, если их оси сдвинуты в пространстве относительно друг друга на угол 900, а также с помощью трех одинаковых катушек, оси которых сдвинуты в пространстве на угол 1200.
Устройство асинхронного двигателя.
Сердечник статора набирается из изолированных стальных пластин с пазами. В продольные пазы статора укладывают его обмотки, которые соединяют звездой или треугольником, что дает возможность включать в сеть с двумя различными линейными напряжениями (380/220). Сердечник статора запрессовывают в литой остов. Сердечник ротора также набирают из изолированных стальных пластин, для уменьшения потерь на вихревые токи. Сердечник крепят на валу машины. В продольные пазы укладывают проводники обмотки ротора.
Сердечник статора запрессовывают в литой остов. Сердечник ротора также набирают из изолированных стальных пластин, для уменьшения потерь на вихревые токи. Сердечник крепят на валу машины. В продольные пазы укладывают проводники обмотки ротора.
В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым роторами. Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса: в пазах ротора укладывают без изоляции (напряжение в короткозамкнутом роторе равно нулю) массивные стержни, соединенные на торцах кольцами. Часто короткозамкнутую обмотку изготавливают из алюминия. Алюминий в горячем состоянии заливают в пазы ротора под давлением. Такая обмотка всегда замкнута накоротко, и включение сопротивления в нее не возможно. Обычно двигатели имеют вентиляторы насаженные на вал ротора. Двигатели короткозамкнутыми роторами проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако, сравнительно малый пусковой момент и большой пусковой ток не позволяют их использовать для привода механизмов, которые должны пускаться в ход под большой нагрузкой.
Для улучшения пускового момента применяют двойную беличью клетку или глубокие пазы. В начальный момент пуска ток выталкивается в верхнюю часть паза (наружную обмотку), что объясняется действием э.д.с. самоиндукции, которая сильно сказывается при неподвижном роторе. По мере возрастания частоты вращения ротора ток, главным образом, будет проходить через внутреннюю клетку (нижнюю часть паза).
Недостатком асинхронного двигателя является его низкий коэффициент мощности: при полной нагрузке – 0,85-0,9; при недогрузке – 0,2-0,3. Низкий коэффициент мощности объясняется большим потреблением реактивной мощности для возбуждения магнитного поля.
Асинхронные двигатели с фазным ротором
применяются для привода таких механизмов, которые пускаются в ход под нагрузкой (лифты, краны). Двигатель должен развивать при пуске максимальный пусковой момент, что достигается с помощью пускового реостата, имеющего несколько позиций. На роторе асинхронного двигателя с фазным ротором расположена трехфазная обмотка, состоящая из трех (шести, девяти) катушек сдвинутых одна относительно к другой на 1200 (600 и т.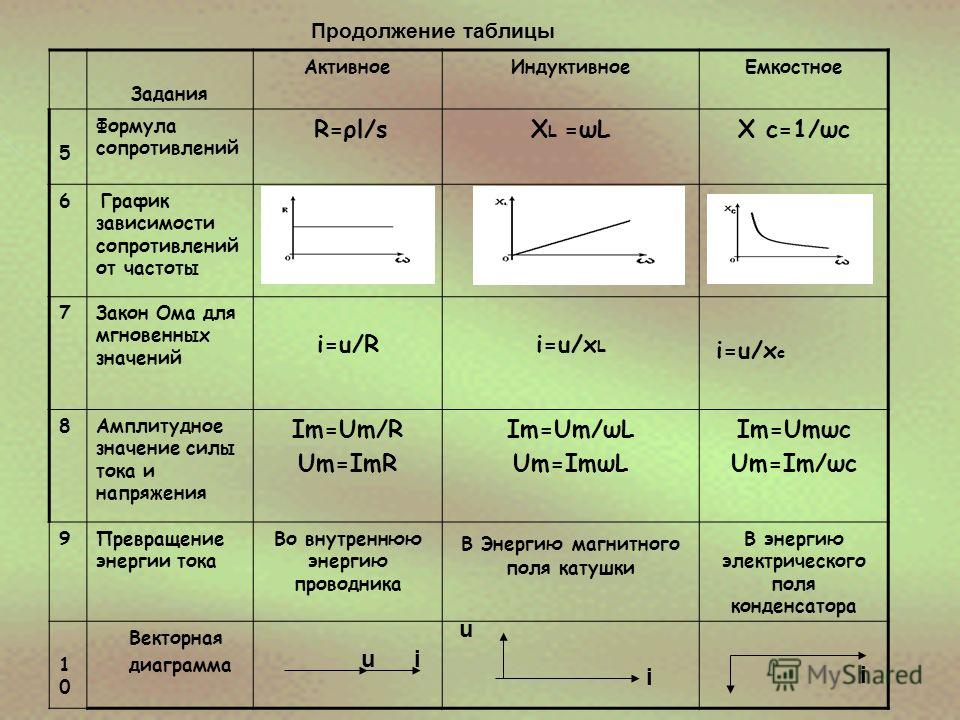 д.). Число полюсов обмоток ротора и статора берутся одинаковыми. Обмотку ротора обычно соединяют звездой. Концы присоединяют к трем кольцам, к которым посредством щеток подключают трехфазный пусковой реостат.
д.). Число полюсов обмоток ротора и статора берутся одинаковыми. Обмотку ротора обычно соединяют звездой. Концы присоединяют к трем кольцам, к которым посредством щеток подключают трехфазный пусковой реостат.
Работа асинхронного двигателя.
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную э.д.с. Так как, обмотка ротора замкнута, то наведенная э.д.с. вызывает в роторе ток. В результате взаимодействия тока ротора с магнитным полем статора возникает электромагнитный момент M=CФmI2cosφ.
В рабочем режиме ротор двигателя вращается с частотой n2, которая меньше частоты поля статора n1, вращающегося в ту же сторону, что и ротор. Поэтому поле, имеющее большую частоту, скользит относительно ротора с частотой, равной разности частот поля статора и ротора, т.е. ns= n1-n2.
Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S.
Скольжение представляет собой отношение частоты вращения магнитного поля статора относительно вращающегося ротора к частоте поля статора.
S= ns/ n1= n1-n2/ n1
В рабочем режиме асинхронного двигателя скольжение 3-5%.
Сопротивление в цепях переменного тока — Цепи переменного тока
Цепи переменного тока
Введение
Как правило, формы сигналов переменного напряжения и тока ряда электронных устройств существенно не отличаются от синусоиды. Дальше, несинусоидальные сигналы могут быть разделены на синусоидальные для целей анализ. Поэтому во всех обсуждениях напряжений и токов в следующем сечения, синусоида будет использоваться как основа математического анализа.
В следующих разделах влияние свойств электрической цепи
будут осмотрены. Эти свойства схемы или параметры схемы
сопротивление, индуктивность и емкость.
Чистая резистивная цепь
Чистая резистивная цепь.
Синусоидальное напряжение подается на сопротивление, как показано на рисунке выше.
Показаны результирующие временные вариации форм тока и напряжения.
на рисунке ниже. По этим формам сигналов можно сделать следующие выводы:
1. Обе волны синусоидальные и имеют одинаковую частоту.
2. Волны совпадают по фазе.
Синфазный ток и напряжение.
Соотношения формы сигнала на рисунке выше могут быть выражены математически. Напряжение, приложенное к сопротивлению цепи чистого сопротивления, равно
Применяя закон Ома в любой момент,
куда
На рисунке ниже показаны две векторные диаграммы. В одном фазор тока и напряжение
phasor показаны как максимальные значения.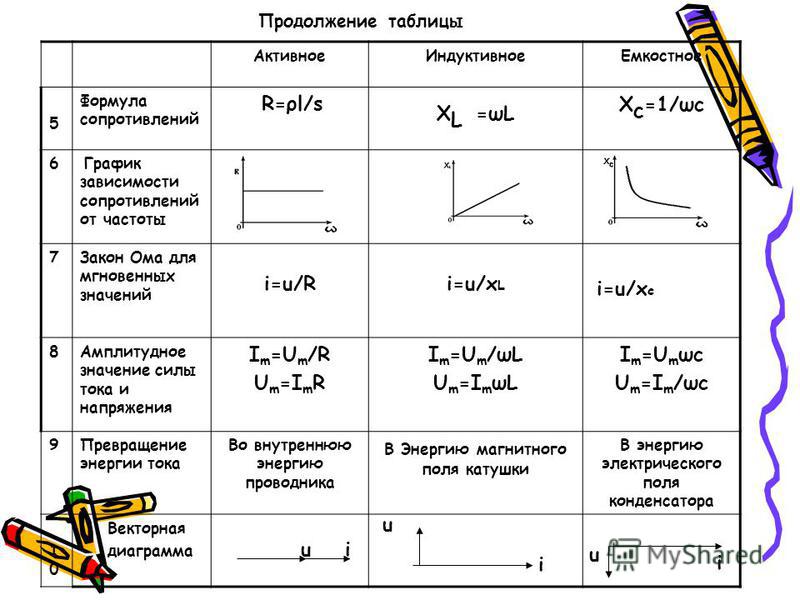 В другом они показаны как эффективные
ценности. Поскольку эти вращающиеся векторы времени представляют собой синусоиды, было бы
правильнее использовать максимальные значения. На практике удобнее
использовать эффективные значения, и, кроме того, эффективные значения
на это указывают традиционные показания счетчика.
В другом они показаны как эффективные
ценности. Поскольку эти вращающиеся векторы времени представляют собой синусоиды, было бы
правильнее использовать максимальные значения. На практике удобнее
использовать эффективные значения, и, кроме того, эффективные значения
на это указывают традиционные показания счетчика.
Векторная диаграмма максимальных и эффективных значений.
Таким образом, закон Ома можно применить к эффективным величинам фазора. ток и векторное напряжение. Проводимость G можно использовать в Уравнения закона Ома для векторного тока и напряжения, как и при постоянном токе. схемы.
Для демонстрации зависимости переменного тока и напряжения по закону Ома от сопротивления приведен следующий пример.
Пример 1: Напряжение, приложенное к сопротивлению чистого
цепь сопротивления v = 150 sin 377 t .
Сопротивление 800 Ом. Рассчитайте (1) максимальное значение тока,
(2) мгновенный ток при t = 0,002 с, и (3) действующее значение
тока.
Решение:
1.
2. Расчет мгновенного напряжения при t = 0,002 с,
Мгновенный ток
Мгновенный ток также можно рассчитать напрямую
3.
Также
Средняя мощность, рассеиваемая на сопротивлении, определяется уравнением
В этом уравнении напряжение и ток даны как эффективные значения. Это здесь следует отметить, что В и I указывают действующие значения переменного тока напряжение и ток, соответственно, если только они не указаны для обозначения максимальные или средние значения. Cos θ — коэффициент мощности, а θ — фазовый угол между током и напряжением. Поскольку в цепь чистого сопротивления ток и напряжение совпадают по фазе, угол θ = 0 и cos θ = 1. Предыдущее уравнение поэтому сводится к уравнению для чисто резистивной цепи
Поведение резистора по переменному току
Поведение резистора по переменному току Для обычных токов и частот резистор ведет себя как диссипативный элемент, преобразующий электрическую энергию в тепло. | Индекс Цепи переменного тока | |||||||||||||||
|
 Он не зависит от направления тока и частоты. Поэтому мы говорим, что импеданс резистора по переменному току равен его сопротивлению постоянному току. Однако это предполагает, что вы используете среднеквадратичные или эффективные значения тока и напряжения в случае переменного тока.
Он не зависит от направления тока и частоты. Поэтому мы говорим, что импеданс резистора по переменному току равен его сопротивлению постоянному току. Однако это предполагает, что вы используете среднеквадратичные или эффективные значения тока и напряжения в случае переменного тока.