
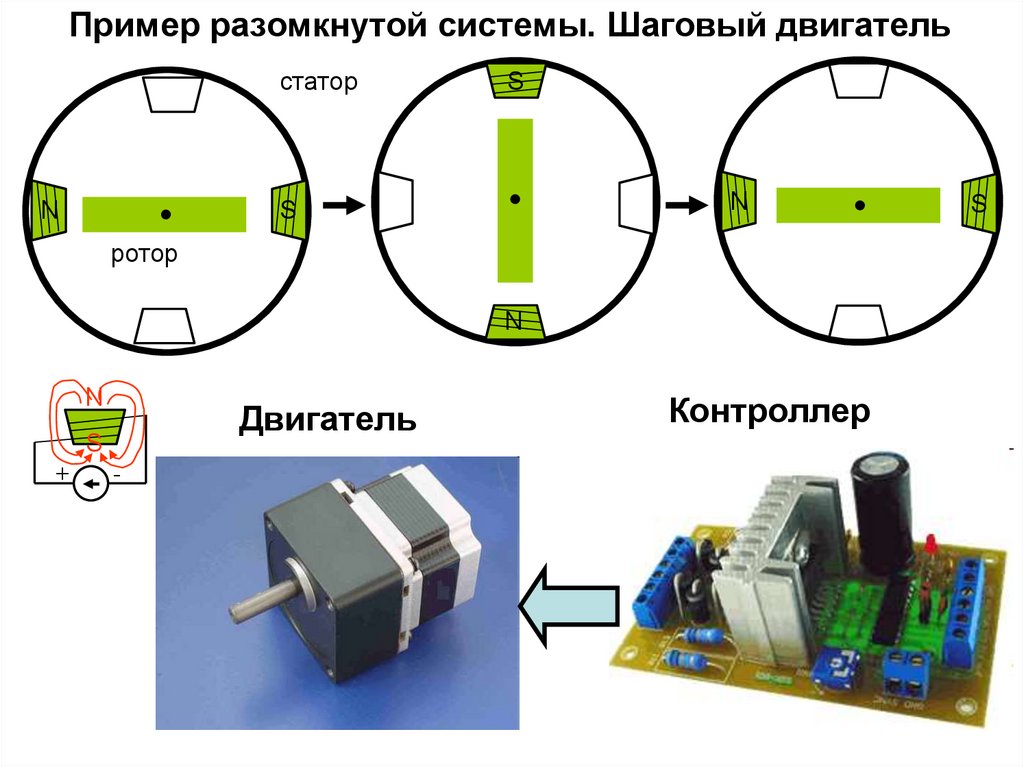
Типы шаговых двигателей — обзор
Существуют многочисленные типы систем управления движения, основанные на коллекторных двигателях постоянного тока, серводвигателях, шаговых двигателях и пр. Рассмотрим управление движением при помощи шаговых двигателей.
Теоретически, шаговый двигатель очень прост. В нем нет щеток или контактных колец. В целом — это
синхронный шаговый двигатель, в котором магнитное поле статора вращаются с помощью электроники, а в роторе находятся постоянные
магниты.
Шаговый двигатель превращает управляющие импульсы в механическое вращение ротора. Преимущество шаговых
двигателей —
низкая стоимость, высокая надежность, высокий крутящий момент в области низких скоростей и простой
конструкции,
которая функционирует практически в любой окружающей среде.
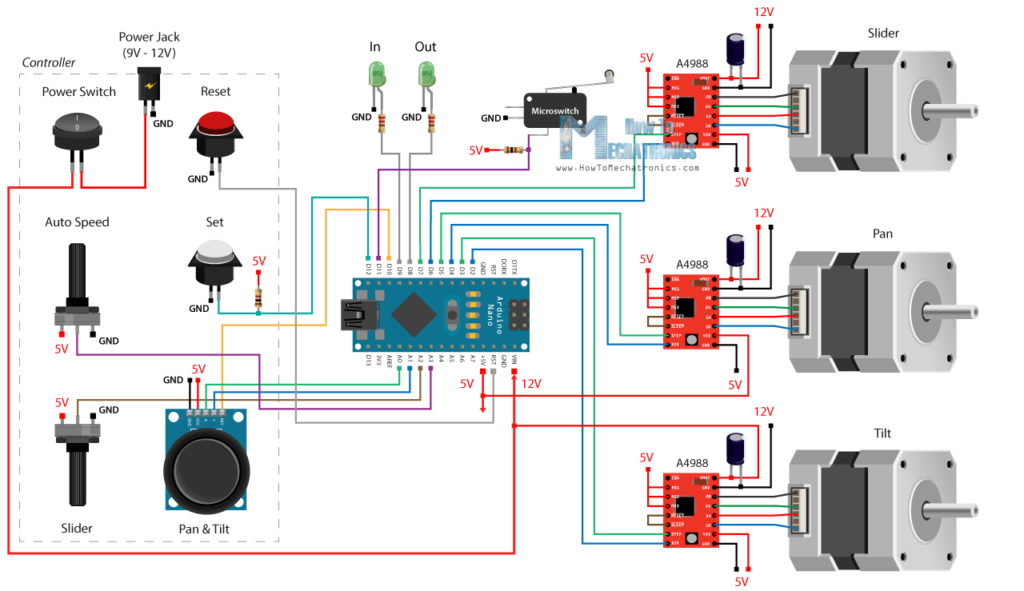
Система управления, основанная на использовании шагового двигателя:
Indexer, он же контроллер — микропроцессор, генерирующий импульс «ШАГ» и «НАПРАВЛЕНИЕ», по сигналам, получаемым от пользователя. Обычно существует множество других сложных функций, возлагаемых на микропроцессор.
Driver, он же силовая часть — преобразователь сигналов контроллера в силовые управляющие импульсы,
необходимые для
вращения ротора. Есть много различных типов драйверов с различными величинами силы тока и формами
управляющих
импульсов. Не все драйверы являются подходящими, для различных двигателей.
купить шаговый двигатель
купить блок управления шаговым двигателем
Существуют три типа шаговых двигателей:
- с переменным магнитным сопротивлением
- с постоянными магнитами
- гибридные
В двигателях с переменным магнитным сопротивлением не используются постоянные магниты.
Как следствие, у двигателя отсутствует так называемый «detent torque» — стопорный момент. Этот тип конструкции не обеспечивает высокого крутящего момента.
У двигателей с постоянными магнитами величина шага редко бывает менее 7,5°, что связано с конструктивными
особенностями его ротора.
Главным достоинством двигателей с постоянными магнитами является их низкая цена, а недостатком — низкие скорости вращения.
В гибридных двигателях многополюсный статор и ротор с постоянными магнитами позволяют, получить значительный крутящий момент (до 300 кгс*см) и малую величину шага (1,8° и менее).
Стопорный момент гибридных шаговых двигателей обычно составляет 10% от величины статического синхронизирующего момента.
По способу питания шаговые двигатели можно разделить на униполярные и биполярные.
Приведенные на рисунке схемы можно использовать как биполярные, так и как униполярные. В случае если отводы
от
средних точек обмоток соединены между собой внутри двигателя и пользователю доступны только пять выводов,
что бывает
очень редко, двигатель можно использовать только как униполярный.
Дополнительные рекомендации по выбору шагового двигателя здесь.
принцип действия, виды, режимы работы
Содержание
- 1 Принцип действия шаговых двигателей, разновидности
- 2 Режимы работы шаговых двигателей
- 3 Шаговые двигатели на постоянном магните
- 4 Гибридные синхронные двигатели
- 5 Вентильные шаговые двигатели
- 6 Шаговые двигатели Лавета
- 7 Параметры шаговых двигателей
- 8 Разновидности драйверов шаговых двигателей
Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом.
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века.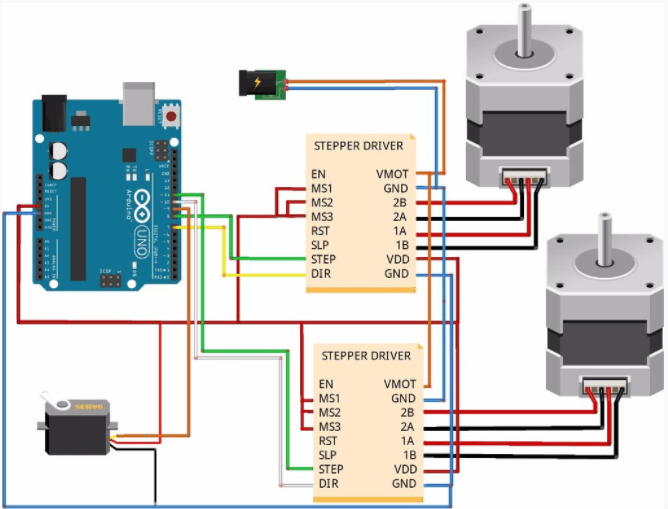 Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности).
В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
 В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
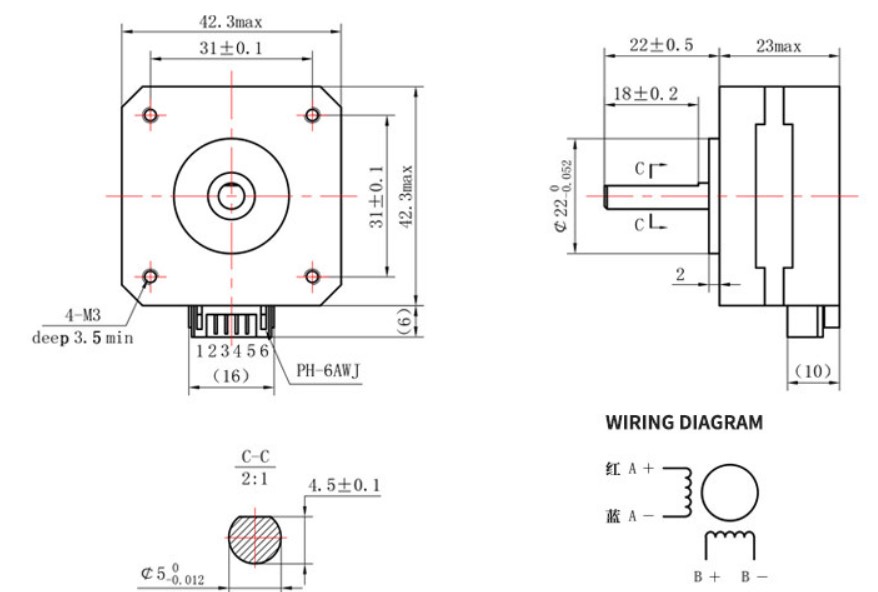
- Унифилярные:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
- Бифилярные:
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
 Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Оранжевый, оранжевый с белым – вторая пара второй обмотки.Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Режимы работы шаговых двигателей
Изделия функционируют в нескольких режимах:
- Полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
- В режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. Получается, на зуб действуют одновременно два полюса. Вал замирает, фиксируя промежуточное положение. Потом первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.
Электрический синхронный мотор
- Микрошаговые режимы считаются искусными ноу-хау наработками конкретных производителей. Режимом заправляет специальный чип, генерирующий управляющие напряжения, чтобы точность позиционирования вала находилась в районе сотой шага (20000 перемещений на 1 оборот). Подобные изыски нужны микроэлектронике, не исключено возникновение потребности тонких технических решениях среди промышленных конвейеров. Драйвер генерирует 50 с лишним тысяч циклов управляющих напряжений на оборот.

Шаговые двигатели на постоянном магните
Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности.
Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера).
Двигатель с постоянным магнитом
Гибридные синхронные двигатели
Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения:
- 0,9 градуса (400 шагов/оборот).
- 3,6 градуса (100 шагов/оборот).

Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.
Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.
Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность. Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
- Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
 Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.Разновидности драйверов шаговых двигателей
В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями:
- Униполярные формируют импульсы тока одного направления. Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям.
- Драйверы с гасящими резисторами сегодня считаются устаревшими. Позволяют выжать из двигателя максимум скорости. Большое количество энергии выделяется теплом на гасящих резисторах.
- Биполярные драйверы популярны сегодня. Игнорируя сложность конструкции, достигается высокая эффективность. Каждый драйвер содержит формирующий блок, составленный четырьмя транзисторами. Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
 Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.RS Компоненты | Промышленные, электронные продукты и решения
Компоненты РС | Промышленные, электронные продукты и решения- Поддержка
- Откройте для себя
- для вдохновения
- Найдите местное отделение
Разделы нашей продукции:
- Аккумуляторы и зарядные устройства
- Соединители
- Дисплеи и оптоэлектроника
- Контроль электростатического разряда, чистые помещения и прототипирование печатных плат
- Пассивные компоненты
- Блоки питания и трансформаторы
- Raspberry Pi, Arduino и средства разработки
- Полупроводники
- Механизм автоматизации и управления
- Кабели и провода
- Корпуса и серверные стойки
- Предохранители и автоматические выключатели
- HVAC, вентиляторы и управление температурным режимом
- Освещение
- Реле и формирование сигналов
- Переключатели
- Доступ, хранение и обработка материалов
- Клеи, герметики и ленты
- Подшипники и уплотнения
- Инженерные материалы и промышленное оборудование
- Застежки и крепления
- Ручной инструмент
- Механическая передача энергии
- Сантехника и трубопровод
- Пневматика и гидравлика
- Электроинструменты, Пайка и сварка
- Компьютеры и периферия
- Уборка и техническое обслуживание помещений
- Офисные принадлежности
- Средства индивидуальной защиты и рабочая одежда
- Безопасность и скобяные изделия
- Безопасность сайта
- Испытания и измерения
|

 Они цифровые и отличаются от двигателей постоянного тока, которые управляются изменением тока через них. Электромагниты шагового двигателя запитываются от внешней схемы управления, например микроконтроллера. Чтобы заставить вал двигателя вращаться, сначала на один электромагнит подается мощность, которая заставляет зубья шестерни магнитно притягиваться к зубьям электромагнита. Когда зубья шестерни совмещены с первым электромагнитом, они немного смещены относительно следующего электромагнита. Таким образом, при включении следующего электромагнита и выключении первого шестерня немного поворачивается, чтобы совпасть со следующим, и оттуда процесс повторяется. Каждое из этих небольших вращений называется «шагом», при этом целое число шагов составляет полный оборот. Таким образом, двигатель можно повернуть на точный угол.
Они цифровые и отличаются от двигателей постоянного тока, которые управляются изменением тока через них. Электромагниты шагового двигателя запитываются от внешней схемы управления, например микроконтроллера. Чтобы заставить вал двигателя вращаться, сначала на один электромагнит подается мощность, которая заставляет зубья шестерни магнитно притягиваться к зубьям электромагнита. Когда зубья шестерни совмещены с первым электромагнитом, они немного смещены относительно следующего электромагнита. Таким образом, при включении следующего электромагнита и выключении первого шестерня немного поворачивается, чтобы совпасть со следующим, и оттуда процесс повторяется. Каждое из этих небольших вращений называется «шагом», при этом целое число шагов составляет полный оборот. Таким образом, двигатель можно повернуть на точный угол.
 Эти намагниченные полюса ротора обеспечивают повышенную интенсивность магнитного потока, и благодаря этому двигатель с постоянными магнитами демонстрирует улучшенные характеристики крутящего момента, чем шаговые двигатели с переменным сопротивлением.
Эти намагниченные полюса ротора обеспечивают повышенную интенсивность магнитного потока, и благодаря этому двигатель с постоянными магнитами демонстрирует улучшенные характеристики крутящего момента, чем шаговые двигатели с переменным сопротивлением.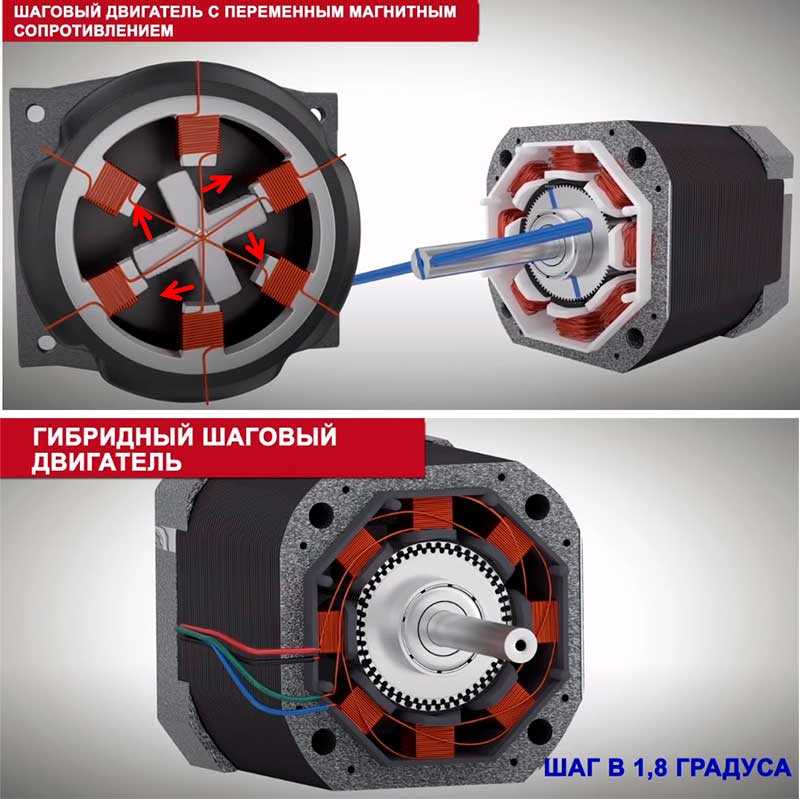 Конструкторы отдают предпочтение постоянным магнитам, если их проект не требует гибридных шаговых двигателей, поскольку стоимость постоянных магнитов меньше, чем у гибридов.
Конструкторы отдают предпочтение постоянным магнитам, если их проект не требует гибридных шаговых двигателей, поскольку стоимость постоянных магнитов меньше, чем у гибридов. Чтобы изменить магнитный полюс, необходимо изменить направление тока в обмотке. Поэтому схема управления должна быть более сложной. На каждую фазу приходится два вывода, и ни один из них не является общим.
Чтобы изменить магнитный полюс, необходимо изменить направление тока в обмотке. Поэтому схема управления должна быть более сложной. На каждую фазу приходится два вывода, и ни один из них не является общим.
 Номинальный ток зависит от приложения. Обычные типы могут потреблять токи в диапазоне от 50 мА до 1 А. Чем выше ток и напряжение, тем выше крутящий момент.
Номинальный ток зависит от приложения. Обычные типы могут потреблять токи в диапазоне от 50 мА до 1 А. Чем выше ток и напряжение, тем выше крутящий момент.