|


 В этом видео мы попробуем разобраться, как оно действует.
В этом видео мы попробуем разобраться, как оно действует.
 Интенсивность этого электрического поля пропорциональна скорости изменения магнитного потока.
Интенсивность этого электрического поля пропорциональна скорости изменения магнитного потока. Андре-Мари Ампер так заинтересовался этим явлением, что принялся за углубленное экспериментальное и математическое исследование взаимосвязи между электричеством и магнетизмом. В результате и был сформулирован закон: Движение электрических зарядов приводит к возникновению магнитных полей.
Андре-Мари Ампер так заинтересовался этим явлением, что принялся за углубленное экспериментальное и математическое исследование взаимосвязи между электричеством и магнетизмом. В результате и был сформулирован закон: Движение электрических зарядов приводит к возникновению магнитных полей.

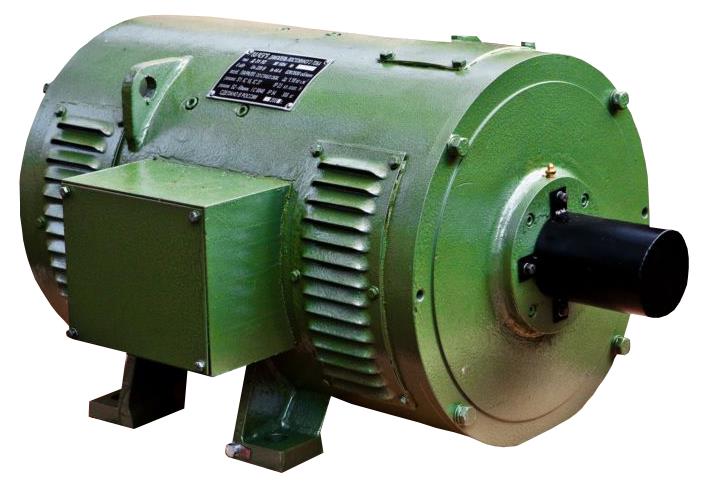
Видео: Двигатель постоянного тока 4ПФМ250SГУХЛ4, 56 кВт, 1500/2800 об/мин, 440/220В, возбуждение независимое, с тахогенераторм,
4158 +2
Биржа ProСтанки
Продам электродвигатели -4ПФМ280МГУХЛ4, 145кВт, 1500об/мин, 440/220В, 258А — 4ПФ160 МВБ04 20 квт, 800-4000 об/мин, 440/220V Новый Смоленск (Россия)
Продам электродвигатели -4ПН-280МГ-ухл4 71квт 1500. об 440/220В -2ПФ225МГУХЛ4, 37квт, 1500 об/мин, 440/220В, 94А -4ПФМ225SУХЛ4, 40кВт Новый
Смоленск (Россия)
об 440/220В -2ПФ225МГУХЛ4, 37квт, 1500 об/мин, 440/220В, 94А -4ПФМ225SУХЛ4, 40кВт Новый
Смоленск (Россия)
Сотрудник
ООО «СЛАВЕРС»
Добавлено: 17.03.2017 в 01:00
Продолжительность: 00:36
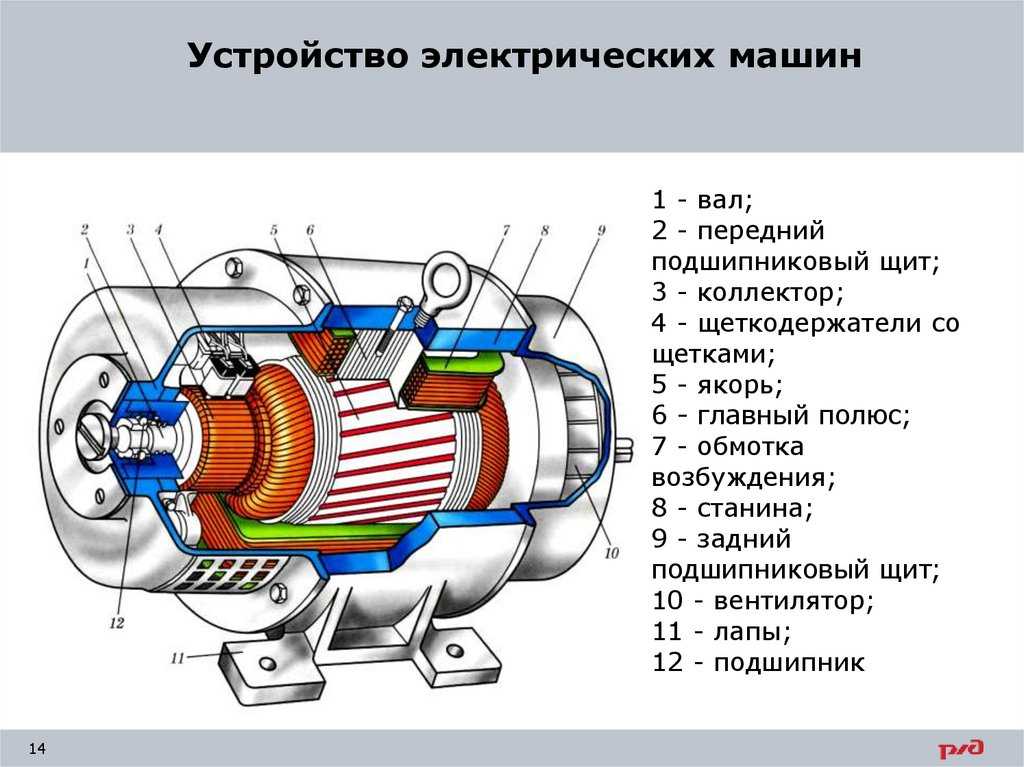
Электродвигатель постоянного тока 4ПФМ250SГУХЛ4 со следующими характеристиками:
— 56 кВт;
— 440В;
— 144А;
— 1500/2800 об/мин;
— возбуждение независимое 220В;
— с тахогенератором;
— с наездником (независимая вентиляция).
Двигатель новый, без эксплуатации.
Комментарии
Пользователь запретил комментирование!
Интересные статьи партнеров
Лазерная резка толстых пластин: методы и навыки отладки процесса
Форматно-раскроечные станки.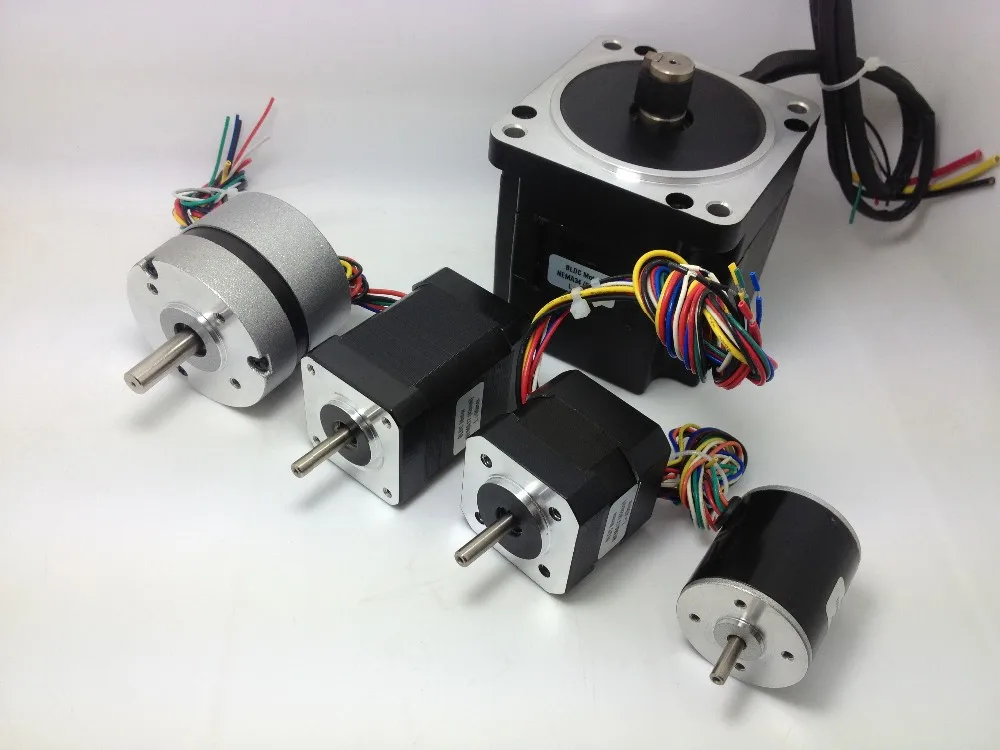 Наличие и ожидаемые поступления.
Наличие и ожидаемые поступления.
Сделай сам: Эксклюзивные карандаши из ценных пород дерева всего за 10 шагов
Поставка и запуск форматно-раскроечного станка Y45-1 в Сергиевом Посаде
Строгание древесины по-японски — это надо видеть!
BMW инвестирует в компанию, создающую 3D-принтер на основе технологии Массачусетского технологического института
Спиннеры и подставки для напитков в стиле Звездных Войн своими руками [чертежи прилагаются]
Как добиться идеально гладкой поверхности древесины без наждачной бумаги
В Твери запущен высокоточный оптоволоконный лазерный станок резки металла LF1390/750 Raycus
Похожее видео
Для отправки комментария необходимы Ваши имя и E-mail адрес.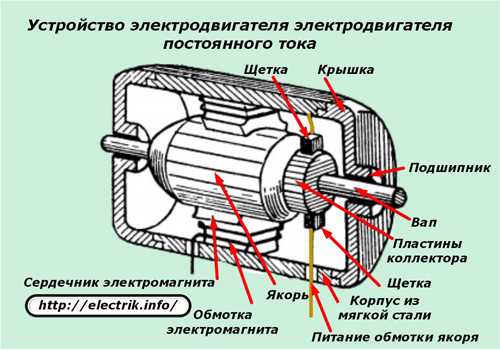
Motor Control, Часть 1: Введение в бесколлекторные двигатели постоянного тока Видео
Из серии: Блок управления двигателем
Мелда Улусой, MathWorks
Изучите основы бесколлекторных двигателей постоянного тока (BLDC). Двигатели BLDC имеют много преимуществ по сравнению с щеточными двигателями постоянного тока. Они имеют высокую эффективность и низкие эксплуатационные расходы и широко используются в бытовой технике, робототехнике и автомобильной промышленности.
Вы узнаете:
- Внутреннее устройство BLDC
- Как смоделировать BLDC в Simulink ® с помощью Simscape Electrical™ и исследовать форму напряжения противо-ЭДС
- Как BLDC управляется с помощью шестиступенчатой коммутации (трапециевидное управление)
- Как BLDC и синхронные машины с постоянными магнитами (PMSM) обычно управляются с помощью трапецеидального и полевого управления, соответственно
Посмотрите это видео, чтобы узнать, как построить модель БКЭП с нуля и смоделировать его противо-ЭДС с помощью Simscape Electrical.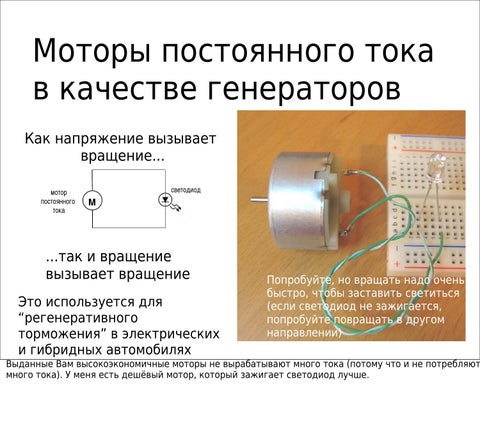
Модель, использованная в этом видео, доступна в этом репозитории GitHub.
В этой серии мы поговорим о бесщеточных двигателях постоянного тока. В этом видео мы расскажем об основах и о том, как работают эти моторы, а в следующих мы подробнее обсудим управление моторами.
От повседневных устройств до более сложных машин используются бесщеточные двигатели постоянного тока, которые преобразуют электрическую энергию во вращательное движение. Бесщеточные двигатели постоянного тока, также называемые BLDC, предлагают множество преимуществ по сравнению со своими щеточными аналогами. BLDC обеспечивают более высокую эффективность и требуют меньшего обслуживания, и поэтому они заменили щеточные двигатели во многих приложениях за последние несколько десятилетий.
Оба типа двигателей работают на основе аналогичного принципа, в котором вращательное движение создается за счет притяжения и отталкивания магнитных полюсов постоянных и электромагнитов. Однако способ управления этими двигателями сильно отличается. Для BLDC требуется сложный контроллер для преобразования мощности постоянного тока в трехфазное напряжение, в то время как щеточным двигателем можно легко управлять с помощью постоянного напряжения.
Для BLDC требуется сложный контроллер для преобразования мощности постоянного тока в трехфазное напряжение, в то время как щеточным двигателем можно легко управлять с помощью постоянного напряжения.
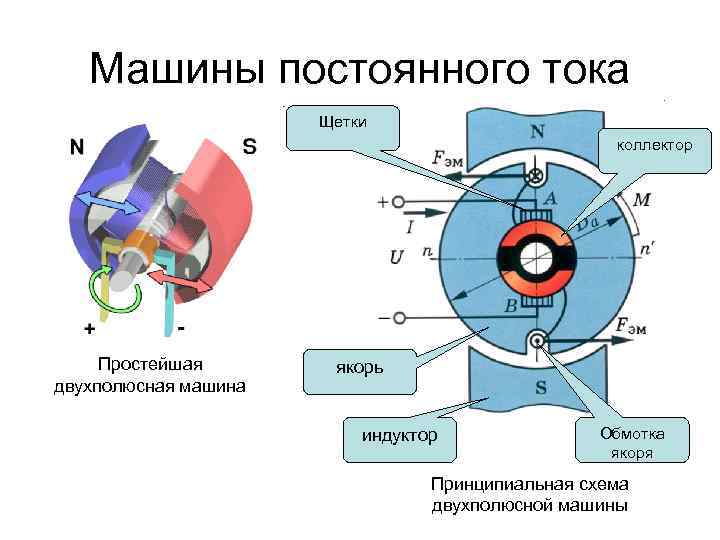
Здесь мы покажем вам упрощенную анимацию коллекторного двигателя постоянного тока. Пропуская постоянный ток через обмотки катушки, мы генерируем электромагнит с этими полюсами. Затем эти полюса взаимодействуют с полюсами постоянного магнита и заставляют ротор вращаться. Обратите внимание, что через каждые пол-оборота ротора, чтобы он продолжал вращаться, нам нужно переставлять полюса электромагнита, что делается путем переключения полярности тока в обмотках катушки. Такое переключение фаз называется коммутацией. В щеточных двигателях коммутация происходит механически, когда щетки соприкасаются с коллектором ротора при вращении двигателя. Из-за этого физического контакта щетки со временем изнашиваются, что влияет на работу двигателя.
BLDC преодолевают недостатки щеточных двигателей, заменяя механическую коммутацию коммутацией с электронным управлением. Чтобы лучше понять это, давайте посмотрим на структуру двигателя BLDC.
Чтобы лучше понять это, давайте посмотрим на структуру двигателя BLDC.
Вы можете думать о BLDC почти как о перевернутой версии коллекторного двигателя, потому что постоянные магниты теперь становятся ротором, а обмотки катушки становятся статором. Существуют двигатели с различным расположением магнитов, в которых статор может иметь разное количество обмоток, а ротор может иметь несколько пар полюсов. Помимо различных конфигураций, вы также можете встретить двигатели с аналогичной структурой, синхронные машины с постоянными магнитами или СДПМ.
BLDC и PMSM определяются как синхронные двигатели с постоянными магнитами в их роторах. Их ключевым отличием является форма напряжения противо-ЭДС. Двигатели действуют как генератор, когда они вращаются. Это означает, что в статорах индуцируется напряжение обратной ЭДС, которое противодействует напряжению привода двигателя. Обратная ЭДС является важной характеристикой двигателя, поскольку, глядя на ее форму, мы можем сказать, какой у нас тип двигателя, а также определяет тип алгоритма управления, который нам нужно использовать для управления нашим двигателем. BLDC имеют трапециевидную форму и обычно управляются трапециевидным управлением. Но СДПМ управляются полевым управлением, потому что они демонстрируют синусоидальную обратную ЭДС. Иногда двигатели PMSM и BLDC используются взаимозаменяемо в сообществе по управлению двигателями, что может вызвать путаницу в отношении их профилей противо-ЭДС. Но в этой серии видеороликов мы будем называть двигатели с трапециевидной противо-ЭДС BLDC, а двигатели с синусоидальной противо-ЭДС — СДПМ.
BLDC имеют трапециевидную форму и обычно управляются трапециевидным управлением. Но СДПМ управляются полевым управлением, потому что они демонстрируют синусоидальную обратную ЭДС. Иногда двигатели PMSM и BLDC используются взаимозаменяемо в сообществе по управлению двигателями, что может вызвать путаницу в отношении их профилей противо-ЭДС. Но в этой серии видеороликов мы будем называть двигатели с трапециевидной противо-ЭДС BLDC, а двигатели с синусоидальной противо-ЭДС — СДПМ.
Простой способ наблюдения за формой обратной ЭДС – это моделирование. Мы можем смоделировать BLDC с одной парой полюсов и клеммами с разомкнутой цепью. Это означает, что ни одна из катушек не управляется. Но мы можем приложить некоторый крутящий момент, чтобы вращать ротор, чтобы он действовал как генератор, а затем измерить напряжение в фазе А, что даст нам противо-ЭДС фазы А. Как вы видите на этом осциллографе, противо-ЭДС двигателя BLDC имеет трапециевидную форму, которая включает в себя области, где напряжение остается постоянным. Это говорит нам о том, что мы можем управлять этим двигателем с помощью постоянного напряжения.
Это говорит нам о том, что мы можем управлять этим двигателем с помощью постоянного напряжения.
Далее мы поговорим о внутренней работе двигателя. Для этого мы будем использовать простую конфигурацию, в которой ротор состоит только из одной пары полюсов, а статор состоит из трех катушек, расположенных под углом 120 градусов. Катушки могут получать питание, пропуская через них ток, который мы будем называть фазами A, B и C. Северный полюс ротора показан красным, а синий представляет южный полюс.
В настоящее время ни одна из катушек не находится под напряжением, а ротор неподвижен. Приложение напряжения к двум фазам, А и С, создает комбинированное магнитное поле вдоль пунктирной линии. В результате теперь ротор начинает вращаться, чтобы выровняться с магнитным полем статора, как показано на этой анимации.
Существует шесть возможных способов возбуждения пар катушек. Коммутируя две фазы одновременно, мы можем заставить магнитное поле статора вращаться, что заставит ротор вращаться и оказаться в положениях, показанных на анимации.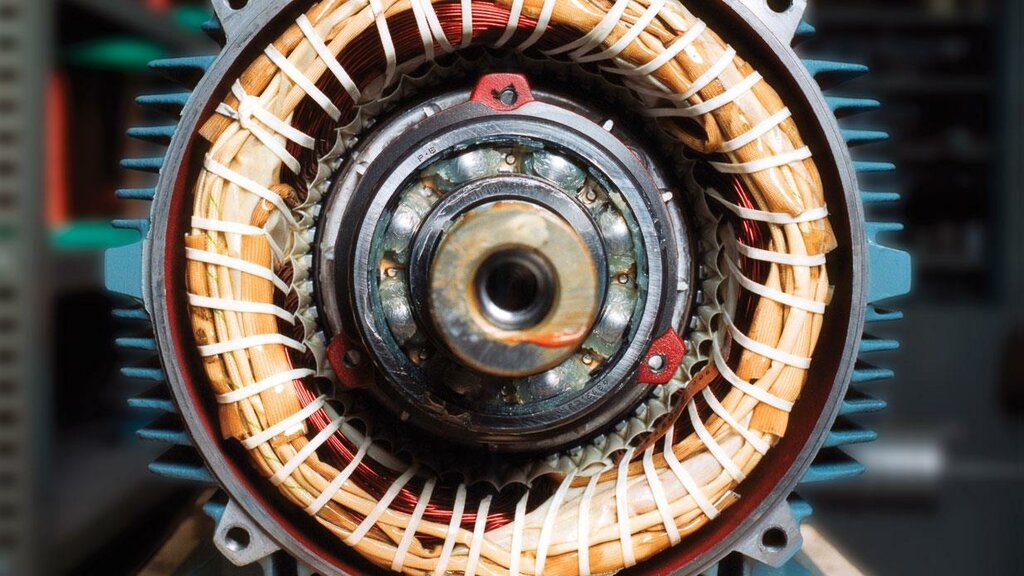 Угол ротора измеряется относительно горизонтальной оси, и существует шесть различных положений ротора, каждое из которых находится на расстоянии 60 градусов друг от друга. Это означает, что если мы сможем коммутировать правильные фазы каждые 60 градусов, мы сможем заставить двигатель вращаться. И это называется шестиступенчатой коммутацией или трапециевидным управлением. Обратите внимание, что при большем количестве пар полюсов коммутация происходит чаще. Чтобы правильно коммутировать двигатель в нужное время с правильными фазами, нам нужно знать положение ротора, которое обычно измеряется с помощью датчиков Холла.
Угол ротора измеряется относительно горизонтальной оси, и существует шесть различных положений ротора, каждое из которых находится на расстоянии 60 градусов друг от друга. Это означает, что если мы сможем коммутировать правильные фазы каждые 60 градусов, мы сможем заставить двигатель вращаться. И это называется шестиступенчатой коммутацией или трапециевидным управлением. Обратите внимание, что при большем количестве пар полюсов коммутация происходит чаще. Чтобы правильно коммутировать двигатель в нужное время с правильными фазами, нам нужно знать положение ротора, которое обычно измеряется с помощью датчиков Холла.
Давайте обсудим, как полюса взаимодействуют друг с другом. Здесь стрелки представляют относительные магнитные силы, а толщина стрелки указывает на напряженность поля. Эти два одинаковых полюса отталкивают друг друга, заставляя ротор вращаться против часовой стрелки. В то же время противоположные полюса притягиваются друг к другу, и ротор продолжает вращаться в том же направлении. Когда он совершает поворот на 60 градусов, происходит следующая коммутация. Давайте также покажем магнитное поле статора, которое мы обсуждали ранее на анимации. Как видите, коммутация происходит таким образом, что ротор никогда не выравнивается с магнитным полем статора, а всегда преследует его.
Когда он совершает поворот на 60 градусов, происходит следующая коммутация. Давайте также покажем магнитное поле статора, которое мы обсуждали ранее на анимации. Как видите, коммутация происходит таким образом, что ротор никогда не выравнивается с магнитным полем статора, а всегда преследует его.
Вот два факта, которые могут объяснить такое поведение. Во-первых, когда магнитные поля ротора и статора идеально совпадают, двигатель создает нулевой крутящий момент. Поэтому мы никогда не позволяем им выравниваться. Во-вторых, максимальный крутящий момент возникает, когда поля расположены под углом 90 градусов друг к другу. Таким образом, цель состоит в том, чтобы приблизить этот угол к 90 градусам. Однако в двигателях BLDC мы никогда не достигаем 90 градусов с помощью шестиступенчатой коммутации, но угол колеблется в некотором диапазоне. И это благодаря простому характеру трапециевидного управления. Но более продвинутые методы, такие как поле-ориентированное управление, обычно используемые для управления СДПМ, как мы обсуждали ранее, позволяют генерировать больший крутящий момент, достигая 90 градусов между магнитными полями статора и ротора.
Для управления фазами шестиступенчатой коммутации используется трехфазный инвертор для преобразования мощности постоянного тока в трехфазные токи, которые показаны на анимации красным и синим цветом. Чтобы подать положительный ток на одну из фаз, необходимо включить переключатель, подключенный к этой фазе на стороне высокого напряжения. А для отрицательного тока переключатель низкой стороны должен быть включен. Постоянное напряжение преобразуется трехфазным инвертором, чтобы поддерживать постоянную скорость двигателя. Но чтобы управлять двигателем на различных скоростях, нам нужно иметь возможность регулировать приложенное напряжение. Один из способов сделать это — использовать ШИМ. Но об этом мы поговорим подробнее в следующих видео. Для получения дополнительной информации о двигателях BLDC не забудьте перейти по ссылкам под этим видео.
Код загрузки и файлы
Получите модели, используемые в этом видео
Сопутствующие товары
- Simscape Electrical
Узнать больше
Скачать модель, использованную в этом видео
Бесплатное пробное ПО для проектирования силовой электроники
Simulink для проектирования силовой электроники
Управление двигателем BLDC с помощью Simulink
Сообщество управления силовой электроникой
Повышение квалификации для перехода на электромобили
Получить технические документы и видеоролики, объясняющие моделирование и симуляцию контроллеров двигателей
Как выбрать электродвигатель: бесщеточные двигатели постоянного тока
 youtube.com/embed/21NiRh25Zu0?rel=0″ frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/21NiRh25Zu0?rel=0″ frameborder=»0″ allowfullscreen=»»/> Ссылки на видео
- Характеристики двигателя
- Сравнительные таблицы двигателей
Стенограмма видео
Это Джанет и я Джо с Грошоппом, и мы добрались до нашего последнего типа двигателя, бесщеточного двигателя постоянного тока, в седьмом видео нашей серии «Как выбрать электродвигатель».
Бесщеточные двигатели постоянного тока, или BLDC, подходят для целого ряда приложений. Их не требующая обслуживания конструкция и высокая удельная мощность делают их хорошим решением для приложений, требующих переменной скорости или не требующих обслуживания.
Несмотря на то, что бесконтактный двигатель постоянного тока считается частью семейства двигателей постоянного тока, его конструкция более близка к двигателям переменного тока. Однако ротор изготовлен из постоянных магнитов из редкоземельных металлов для создания поля. Они коммутируются электронным управлением.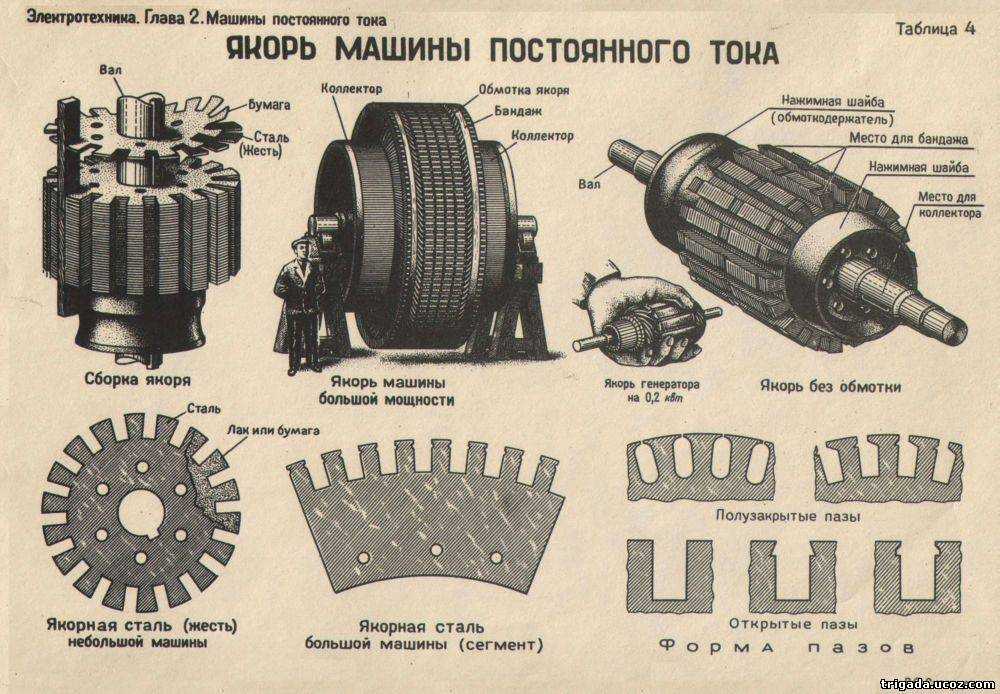 Они могут получать обратную связь от датчиков, определяющих положение вращения ротора, или путем измерения напряжения в катушках во время работы двигателя для определения положения ротора.
Они могут получать обратную связь от датчиков, определяющих положение вращения ротора, или путем измерения напряжения в катушках во время работы двигателя для определения положения ротора.
Двигатели BLDC имеют характеристики скорость-момент, аналогичные коллекторным двигателям постоянного тока, однако для их коммутации требуются датчики Холла и блок управления двигателем. Использование регулятора делает их подходящими для приложений с регулируемой скоростью.
BLDC двигатель использует преимущества двигателей переменного, постоянного и универсального типов и объединяет их в одном устройстве. Он имеет длительный срок службы, низкие эксплуатационные расходы, бесшумную работу и возможность переменной скорости двигателя переменного тока; высокий пусковой момент и линейная кривая скорость-момент двигателя постоянного тока; и, как и двигатели переменного и постоянного тока, он хорошо работает с коробками передач. Бесщеточные двигатели постоянного тока имеют высокую удельную мощность, уступая только универсальному двигателю, и имеют лучший рейтинг эффективности от 65 до 80 процентов.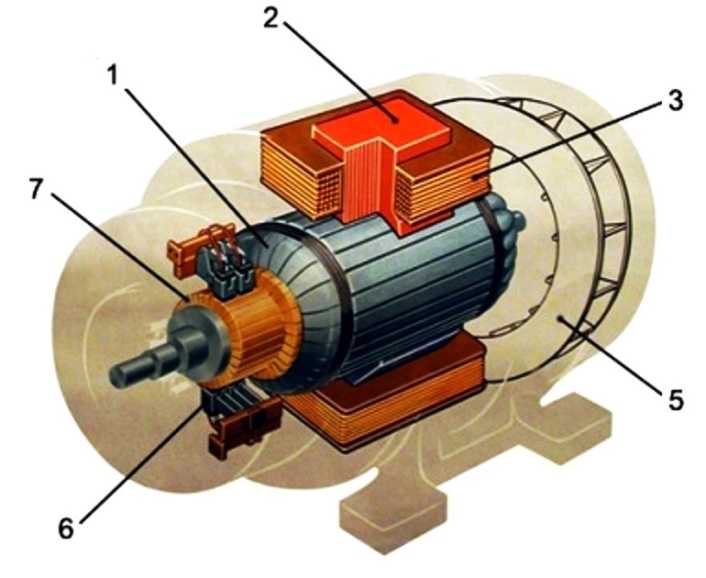
Несмотря на эти преимущества, есть один существенный недостаток: стоимость. Стоимость редкоземельных магнитов и элементов управления, приводящих в действие первоначальный двигатель, стоит выше, чем у двигателя постоянного тока. Но если вы взвесите первоначальные затраты на срок службы двигателя и его сильные стороны, бесколлекторные двигатели постоянного тока могут оправдать вложения для некоторых приложений.
Кривая скорость-момент для двигателя BLDC очень похожа на кривую для двигателя постоянного тока. Эта кривая представляет собой работу двигателя с полным приложенным напряжением, но без управления, влияющего на работу. Поскольку с этим двигателем всегда используется управление, рабочий диапазон бесщеточного двигателя постоянного тока обеспечивает большую гибкость.
Взгляните на золотую область на кривой. Двигатель может работать в любом месте в пределах этой зоны.
Ключевым моментом для оценки двигателя BLDC является крутящий момент. Эта конкретная конструкция рассчитана на крутящий момент 6,9 дюйм-фунтов, и, как и у всех бесщеточных двигателей постоянного тока, максимальный номинальный крутящий момент не зависит от скорости. Единственным ограничением является то, что при скорости ниже 300 об/мин может произойти заклинивание двигателя. Зубчатость можно уменьшить, используя более сложную систему управления и обратной связи.
Единственным ограничением является то, что при скорости ниже 300 об/мин может произойти заклинивание двигателя. Зубчатость можно уменьшить, используя более сложную систему управления и обратной связи.
На этом наш обзор четырех типов моторов завершен. Подведем итоги сравнением и обсудим, как применить эту информацию в процессе разработки вашего приложения.
Когда вы смотрите на кривые для различных типов двигателей по отдельности, трудно получить точное сравнение. Вот почему мы создали этот график, чтобы сравнить кривые скорость-момент для всех четырех типов двигателей. Мы используем одинаковую шкалу, чтобы наглядно проиллюстрировать различия между двигателями.
Например, вы можете увидеть значительно более высокую скорость холостого хода универсального двигателя, фиолетовую кривую, и значительно более высокие пусковые моменты двигателей постоянного тока и бесщеточных двигателей постоянного тока.
Я хотел бы отметить, что все эти двигатели имеют примерно одинаковый физический размер, несмотря на их существенно разные характеристики. Вы можете скачать этот график по ссылке ниже.
Вы можете скачать этот график по ссылке ниже.
Мы также составили эту таблицу, чтобы быстро сравнить типы двигателей и предоставить «отправную точку», когда вы задумаетесь о применении. И снова на этой диаграмме сравниваются двигатели примерно одинакового физического размера.
Ждите следующего видео, в котором мы обсудим настройку мотора. Не забудьте проверить приведенные ниже ссылки на график скорости, крутящего момента и эффективности, а также на сравнительную таблицу двигателей. Для получения дополнительной информации о Groschopp или наших бесколлекторных двигателях постоянного тока посетите наш веб-сайт по адресу www.groschopp.com
Основы мотор-редуктора | Тематические исследования
Мы берем все, что обсудили, и применяем в трех сценариях. Любой мотор-редуктор подойдет для большинства применений, но обычно есть только один или два наиболее подходящих типа.
Основы мотор-редуктора | Подходящие мотор-редукторы – интегрированные решения
В этом видео мы обсуждаем, как выбрать мотор-редуктор за четыре простых шага, выбрав встроенный мотор-редуктор.
Основы мотор-редуктора | Подходящие мотор-редукторы — выбор двигателя
В этом видео мы продолжаем обсуждение выбора мотор-редуктора путем сопряжения отдельных компонентов. Теперь мы рассмотрим, как выбрать двигатель на основе редуктора, выбранного для применения.
Основы мотор-редуктора | Соответствующие редукторные двигатели — выбор редуктора
В этом видео мы начинаем подробное изучение выбора мотор-редуктора. Существует два метода сопряжения двигателей и редукторов для создания оптимального мотор-редуктора. Здесь мы начнем с первого метода, взглянув на выбор коробки передач.
Основы мотор-редуктора | Параметры приложения
В этом видеоролике рассматриваются важные критерии применения, которые необходимо учитывать при выборе мотор-редуктора.
Основы мотор-редуктора | Угловые переходники
Угловые переходники отлично подходят для применений, где размер и пространство имеют первостепенное значение. С возможностью выхода на угол 90 градусов.
С возможностью выхода на угол 90 градусов.
Основы мотор-редуктора | Планетарные редукторы
Планетарные редукторыидеально подходят для приложений, требующих высокого крутящего момента в небольшом корпусе и выходного вала с соосным выравниванием. Мы обсудим конструкцию, характеристики, преимущества и недостатки планетарных редукторов.
Основы мотор-редуктора | Редукторы с параллельными валами
Редукторы с параллельными валами— идеальное решение для непрерывного режима работы; приложения, требующие низкого крутящего момента; приложения с более высокими температурами окружающей среды; или приложения, которые являются экономически сознательными.
Основы мотор-редуктора | Введение в мотор-редукторы
В этом видео мы даем краткий обзор двигателей и объясняем обоснование использования мотор-редукторов — почему использование редуктора (редуктора) с двигателем позволяет использовать двигатель меньшего размера и увеличить крутящий момент и/или скорость.
Технический совет: поиск и устранение неисправностей перегрева двигателя
Даже если двигатель соответствует применению на бумаге, вы все равно можете столкнуться с новыми переменными во время тестирования. Вот шесть общих проверок, которые помогут определить, почему ваш двигатель может перегреваться.
Технический совет: Планетарные коробки передач
В этом видео обсуждаем планетарные редукторы. Узнайте все тонкости работы этих редукторов, а также их преимущества и недостатки.
Как выбрать электродвигатель: инженерные инструменты
В завершение этой серии видеороликов мы поделимся несколькими формулами расчета двигателя и другими инструментами, которые помогут вам в процессе выбора.
Как выбрать электродвигатель: примеры из практики
Мы берем все, что мы обсуждали, и применяем это в трех сценариях с различными уровнями настраиваемых двигателей. Любой двигатель подойдет для большинства применений, но обычно есть только один или два наиболее подходящих типа.
Как выбрать электродвигатель: изготовленные на заказ электродвигатели
В этом видео мы надеемся развеять любые опасения, которые могут возникнуть у вас по поводу того, что связано с настройкой двигателя для вашего приложения. Вам не нужно брать стандартный двигатель и пытаться сделать его «подходящим» для вашего приложения.
Как выбрать электродвигатель: бесщеточные двигатели постоянного тока
В этом видео мы обсуждаем конструкцию, характеристики, преимущества и недостатки двигателей BLDC. Мы также рассмотрим кривые производительности двигателя BLDC для скорости, крутящего момента и эффективности.
Как выбрать электродвигатель: двигатели переменного тока
В этом видео мы обсуждаем конструкцию, характеристики, преимущества и недостатки двигателей переменного тока. Мы также рассмотрим кривые производительности двигателя переменного тока по скорости, крутящему моменту и КПД.
Как выбрать электродвигатель: двигатели постоянного тока
В этом видео мы обсуждаем конструкцию, характеристики, преимущества и недостатки двигателей постоянного тока.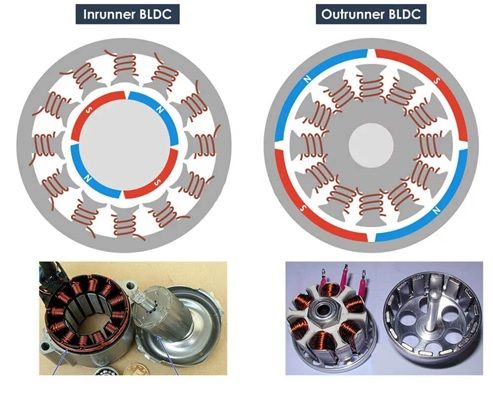 Мы также рассмотрим кривые производительности двигателя постоянного тока по скорости, крутящему моменту и КПД.
Мы также рассмотрим кривые производительности двигателя постоянного тока по скорости, крутящему моменту и КПД.
Как выбрать электродвигатель: Universal Motors
В этом видео мы обсуждаем конструкцию, характеристики, преимущества и недостатки Universal Motors. Мы также рассмотрим кривые производительности универсального двигателя по скорости, крутящему моменту и эффективности.
Как выбрать электродвигатель: критерии применения (часть 2)
Это вторая часть нашего обсуждения критериев подачи заявок. Это кажется очевидным, но мы хотели бы напомнить нашим клиентам всегда учитывать максимальный размер и вес двигателя, который позволяет их применение, и знать, какой ожидаемый срок службы должен быть у двигателя.
Как выбрать электродвигатель: критерии применения (часть 1)
В этом видео (и в следующем) рассматриваются важные критерии приложения. Сначала мы сосредоточимся на ограничениях приложения, которые необходимо учитывать в процессе проектирования.
Как выбрать электродвигатель: введение и основы
Выбор правильного двигателя может быть сложным процессом. В этом первом видео мы знакомим с основными концепциями электродвигателей.
Как переключать напряжение между 12 В и 24–48 В на бесколлекторном контроллере Groschopp
В этом видеоролике показано краткое пошаговое руководство по переключению выходного напряжения на бесщеточном регуляторе Groschopp.
Как установить ограничение тока на бесколлекторном контроллере Groschopp
В этом коротком видеоролике показано, как установить текущий предел для бесколлекторного управления Groschopp.
Как настроить усиление на бесколлекторном контроллере Groschopp
Посмотрите это видео, чтобы узнать об усилении и о том, как установить его на бесколлекторном регуляторе Groschopp.
Технические советы Groschopp: инструмент поиска двигателя
В этом учебном видео показано, как использовать инструмент поиска двигателей Groschopp, чтобы найти идеальный двигатель.
Технические советы: основы бесщеточного управления
Посмотрев это видео, вы изучите основы всех бесколлекторных элементов управления Groschopp, типов их корпусов, а также опций для низкого и высокого напряжения.
Технические советы: масло или смазка
В этом видео мы расскажем о 7 факторах, которые следует учитывать при выборе между маслом и смазкой, чтобы определить, какой тип смазки лучше всего подходит для вашего мотор-редуктора.
Планетарные прямоугольные мотор-редукторы постоянного тока
Groschopp предлагает линейку планетарных прямоугольных мотор-редукторов постоянного тока, которые обладают преимуществами стандартных прямоугольных мотор-редукторов без потери эффективности.
Groschopp представляет модификации и 3D-модели
Groschopp упрощает выбор правильного двигателя или мотор-редуктора, добавляя 3D-модели на каждую страницу продукта, а также на страницы настройки.
Технические советы: основы бесщеточного двигателя постоянного тока
В этом видеоролике с техническими советами объясняются основы бесщеточных двигателей постоянного тока: как они устроены и как работают.
Технические советы: задний привод и торможение
В этом техническом совете обсуждаются преимущества заднего привода и тормозов, а также типы приложений, для которых они лучше всего подходят.
Технические советы: рабочий цикл
В этом видео мы даем вам краткое руководство по важности рабочего цикла для оптимальной работы маломощных двигателей и мотор-редукторов.
Технические советы: суровые условия эксплуатации двигателя
Как двигатели малой мощности рассчитаны на суровые условия эксплуатации. Понимание рейтингов IP и жестких условий эксплуатации важно для точного описания требований приложения.
Технические советы: основы двигателя переменного тока
Понимание характеристик двигателей переменного тока позволяет инженерам выбирать двигатель, наиболее подходящий для их применения.
Преимущество Groschopp
Что делает Groschopp особенной компанией для наших клиентов? Все зависит от людей, которые составляют компанию. Узнайте, как они лежат в основе Groschopp Advantage.
История Groschopp, Inc.
Богатая история Groschopp, Inc. начинается в 1930 году с компании под названием Wincharger. Как мы попали из Wincharger в Groschopp? Смотрите и узнавайте.
Технические советы: как проверить поврежденную арматуру
Вот три быстрые проверки, которые вы можете выполнить с помощью вольтметра, чтобы проверить обмотку якоря двигателя постоянного тока, чтобы определить, правильно ли работает якорь двигателя.
Новый бесщеточный двигатель постоянного тока
Представляем надежную комбинацию бесщеточного двигателя постоянного тока и редуктора. Новый бесщеточный двигатель не требует технического обслуживания, обладает высокой надежностью и имеет срок службы более 20 000 часов.