
Устройство шагового двигателя и его управление
Типы шаговых двигателей
Конфигурация обмоток определяет деление ШД на биполярные и униполярные.
У биполярного двигателя одна обмотка на каждую фазу. Всего их в биполярном двигателе две. Выводов, соответственно, четыре. Для изменения направления силовых линий магнитного поля драйвер переполюсовывает обмотку.
Аналогично описанному устройству на каждую фазу униполярного двигателя также приходится одна обмотка. Отличием является отвод из середины обмотки. Это решение позволяет изменять направление силовых линий магнитного поля, просто переключая части обмотки. Выводы из срединной части обмоток иногда объединяются внутри корпуса мотора, поэтому выводов может насчитываться и пять, и шесть.
В ряде случаев униполярные двигатели оснащаются четырьмя раздельными обмотками. Из-за этого неопытные пользователи часто неправильно называют эти моторы 4-х фазными. От каждой обмотки идут свои выводы, и поэтому общее их количество равняется восьми. Такой ШД при соответствующей схеме соединения обмоток может стать как биполярным, так и униполярным. Нижеприведённые иллюстрации наглядно демонстрируют этот момент. На рис. а) изображена схема биполярного ШД, на рис. б) – схема униполярного, на рис. в) четырёхобмоточного.
Такой ШД при соответствующей схеме соединения обмоток может стать как биполярным, так и униполярным. Нижеприведённые иллюстрации наглядно демонстрируют этот момент. На рис. а) изображена схема биполярного ШД, на рис. б) – схема униполярного, на рис. в) четырёхобмоточного.
Эксплуатационные свойства ШД
Шаговые двигатели как компоненты, используемые в автоматизации станков, обладают рядом важных эксплуатационных свойств, к которым относятся следующие.
1. Дискретность перемещений.
Это главное свойство, определяющее все остальные параметры шагового двигателя. Львиная доля шаговых двигателей выполняет 200 или 400 шагов за один оборот ротора. Однако благодаря возможности промежуточной фиксации ротора можно добиваться увеличенного количества шагов до 800 и более. В сверхточных моделях число дискретных перемещений может достигать 10 тысяч шагов за оборот.
2. Ограничения в точности установки ротора.
Погрешность установки ротора в большинстве выпускаемых сегодня ШД составляет 5% от размера шага.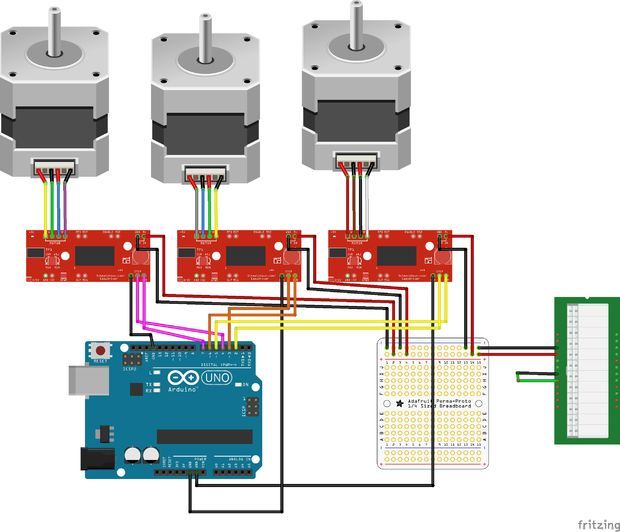 Таким образом, при шаге в 1.8° неточность установки будет равняться примерно 5.4´. На практике, при дроблении шага, например, 1 к 10, шаг будет равен погрешности установки, причём, увеличение количества делений не приведёт к повышению точности перемещения. Единственное, в чём это может оказаться эффективным, – в обеспечении плавности перемещения ротора.
Таким образом, при шаге в 1.8° неточность установки будет равняться примерно 5.4´. На практике, при дроблении шага, например, 1 к 10, шаг будет равен погрешности установки, причём, увеличение количества делений не приведёт к повышению точности перемещения. Единственное, в чём это может оказаться эффективным, – в обеспечении плавности перемещения ротора.
3. Соотношение крутящего момента и скорости вращения ротора.
С большой степенью приближения можно говорить о том, что значение произведения момента и скорости вращения вала шагового двигателя является постоянным. При возрастании скорости вращения ротора величина крутящего момента уменьшается пропорционально.
Достоинства шаговых электродвигателей
В число основных достоинств, определяющих широкое применение этого типа электрических двигателей, входят следующие.
1. Зависимость угла поворота ротора от количества импульсов, поданных на обмотку двигателя.
2. Обеспечение полного момента при остановке двигателя (при подаче питания на обмотки).
3. Повторяемость. Точность шаговых двигателей составляет от 3 до 5% величины шага, причём, ошибка от шага к шагу не накапливается.
4. Быстрый старт, мгновенная остановка, минимальное время переключения на реверс.
5. Надёжность, обусловленная отсутствием щёток. В общем случае длительность срока исправной службы двигателя зависит только от надёжности подшипников.
6. Жёсткая зависимость положения ротора от входного сигнала позволяет позиционировать ротор, не прибегая к использованию обратной связи.
7. Возможность вращения полезной нагрузки, присоединенной напрямую к валу электромотора без редуктора, с предельно малой скоростью.
8. Широкий интервал скоростей.
9. Более доступная цена в сравнении с сервоприводами.
Недостатки шаговых электродвигателей
Однако при всех положительных моментах существует и ряд недостатков, присущих шаговым электрическим моторам. Их краткий перечень:
- возникновение резонансных явлений при функционировании;
- вероятность пропуска шагов, что из-за отсутствия обратной связи приводит к невозможности контроля положения ротора;
- снижение момента и потеря стабильности при высокой скорости;
- малое значение удельной мощности.


Организация управления шаговым двигателем
Наиболее простым вариантом является следующий.
В составе двигателя 4 электромагнитные катушки A, B, C и D. Если подавать на них напряжение, то они превращаются в магниты. При этом катушки А и В активны при протекании тока в прямом направлении, а C и D — в обратном. Предположим, что полезной нагрузкой для данного двигателя является зубчатое колесо, зубчики которого притягиваются к катушкам при подаче на них напряжения.
Таким образом, при последовательном включении тока в катушках колесо начнёт вращаться. Для обеспечения плавности движения в общем случае можно увеличить либо число зубчиков, либо количество катушек. Принцип управления мотором при этом останется неизменным. Изменяться будут лишь усилие и угол поворота за один цикл включения-отключения питания. В обычных условиях применяется такая конфигурация, когда располагают по четыре катушки вдоль траектории вращения, и на каждую группу катушек приходится по зубчику. Система выглядит как шестерня, окружённая катушками.
Система выглядит как шестерня, окружённая катушками.
Для простоты понимания принципа управления рассмотрим упрощённую модель – 4 катушки и 1 зубчик (стрелка на колесе). Предположим, что перед включением двигателя зубчик находился возле катушки D.
1. Самое очевидное решение для запуска вращения – подать питание на катушку А. Колесо провернётся, и стрелка замрёт возле этой катушки. Отключаем А и подаём питание на В. Стрелка движется к В и встаёт рядом с этой катушкой. Отключаем В, и подключаем C. Стрелка останавливается около неё. Отключаем C, включаем D – стрелка останавливается на D. Отключаем D, включаем A, и процесс повторяется.
За каждый цикл включения-отключения питания колесо поворачивается на угол в 90°. Следовательно, на полный круг потребуется четыре цикла, что обуславливает довольно высокую угловую скорость. Если масса колеса будет высокой, то скоростной поворот вызовет возникновение значительной инерции. Инерционное ускорение может снизить точность поворота колеса, так как разогнавшееся колесо не сможет остановиться мгновенно. Всё это может привести к потере контроля вращения, а при самом неблагоприятном сценарии к отрыву колеса и разрушению системы.
Всё это может привести к потере контроля вращения, а при самом неблагоприятном сценарии к отрыву колеса и разрушению системы.
Достоинством данного принципа управления является сравнительная простота реализации.
2. Не таким очевидным, но достаточно эффективным является следующее решение. Подаём питание на катушки А и D. Колесо проворачивается, и стрелка фиксируется между А и D. Отключаем D, подключаем В. Стрелка замирает между катушками А и В. Отключаем А, подключаем C. Стрелка встаёт между В и C. Отключаем В, подключаем D. Стрелка между C и D. Отключаем C, подключаем А. Стрелка фиксируется между D и А. Далее процесс повторяется. За один цикл включения-отключения те же 90°, полный круг за те же четыре цикла. Кажется, что всё то же самое? Однако отличием является увеличенный крутящий момент, поскольку «в силе» оказывается одновременно две катушки. Следовательно, пороговое значение скорости, при которой инерция становится неуправляемой, повышается, что выгодно отличает этот принцип от первого.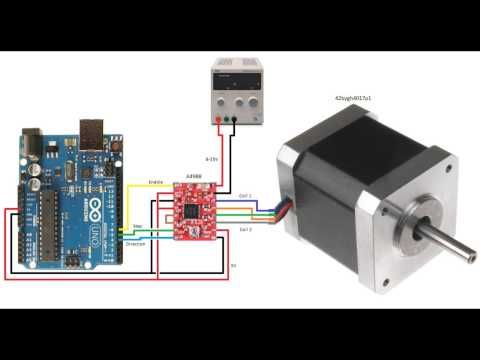
3. Дробление шага. Допустим, что реализована схема не только включения и отключения катушек, а и подачи на них промежуточных значений напряжения питания – 0, 25, 50, 75, 100%. При этом схема подаёт питание в такой последовательности (для пары A и C):
C100%, А 0% – C 75%, А 25% – C 50%, А 50% – C 25%, А 75% – C 0% и А 100%.
По тому же правилу напряжение питания подаётся на пары катушек А-В, В-D, D-Cи C-В.
Дробление шага позволяет снизить уровень шума и избавиться от дребезжания. Кроме того, обеспечивается плавность движения. Инерция пренебрежимо мала, и управление не теряется. Недостатком является сложность реализации.
4. Подача напряжения аналоговым способом. Концептуально принцип напоминает дробление шага на бесконечное количество положений. Напряжение, подаваемое на катушку C, плавно снижаем со 100% до 0. Для катушки А напряжение, напротив, плавно увеличиваем с 0% до 100. Точно так же поступаем с парами А-В, В-C, C-Dи D-В. Обеспечивается плавное вращение, надёжный контроль, отличный крутящий момент. Главный недостаток – отсутствие точности, присущее аналоговым схемам.
Главный недостаток – отсутствие точности, присущее аналоговым схемам.
5. Этот принцип обеспечивает более высокий крутящий момент. Реализуется он следующим образом. Подключается D и А: стрелка между D и А. Выключаем D: стрелка у А. Включаем В: стрелка между А и В. Выключаем А: стрелка у В. Включаем: стрелка между C и В. Выключаем В: стрелка у C. Включаем D: стрелка между D и C. Отключаем C – стрелка находится у D. Подключаем А – стрелка перемещается в точку между D и А. Процесс повторяется. Отличается от вышеописанного способа дробления шага (п.3) более высоким крутящим моментом.
Принципы 1, 2, 3 и 5 являются типовыми и применяются очень часто. Для них разработаны даже свои обозначения. Если принять положение «рядом с катушкой» за 1, а положение «между катушками» за 2, то обозначения будут следующими.
1 – «1 phase» (полношаговый). Стрелка фиксируется лишь на фазе «1». Данный метод используется редко, поскольку при нём обеспечивается недостаточный крутящий момент.
2 – «2 phase» (полношаговый).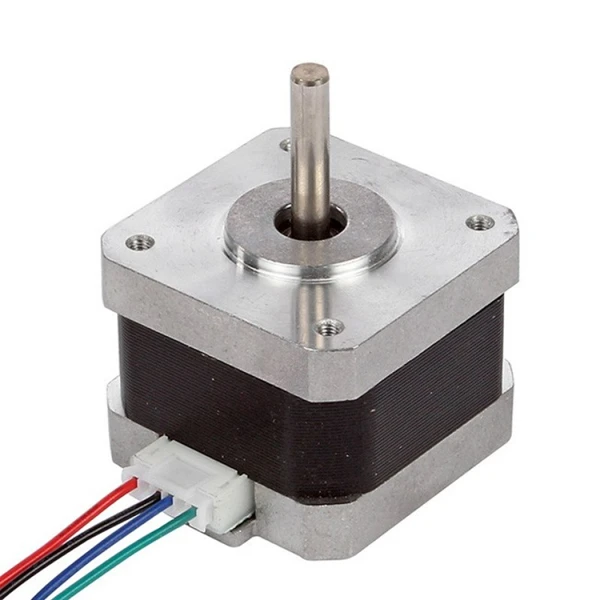 Стрелка фиксируется лишь на фазе «2».
Стрелка фиксируется лишь на фазе «2».
3 – так как число фаз зависит от частоты дробления шага, то обозначений существует несколько. Например, «4: 2W1-2 phase» (2×2=4) обозначает, что переход из положения «перед катушкой» в «перед следующей катушкой» выполняется за 4 шага. А обозначение «8: 4W1-2 phase» (4×2=8) расшифровывается так же, только количество шагов равняется 8. Иначе такой механизм называется микрошаговым.
5 – «1-2 phase» (полушаговый). Стрелка фиксируется на обеих фазах – на «1» и «2».
Гибридный шаговый двигатель принцип работы
Дмитрий Левкин Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления. Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода сервопривода разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства меньше элементов и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые электродвигатели. Виды и работа. Особенности
- Устройство шагового двигателя
- Сравнение сервоприводов и шаговых двигателей
- Как работает шаговый двигатель?
- Шаговые двигатели
- Как работает шаговый электродвигатель?
Шаговый электродвигатель - Шаговый двигатель
- Шаговые двигатели — конструкция, принцип работы и применение
- Шаговый двигатель: особенности и принцип работы
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Принцип работы шагового двигателя на примере Nema 17/ ШД HS4401
 youtube.com/embed/D0fPwugty0E» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/D0fPwugty0E» frameborder=»0″ allowfullscreen=»»/>Шаговые электродвигатели. Виды и работа. Особенности
Шаговый двигатель 2. Что такое Шаговая система? Щеточные моторы постоянного тока 4. Безщеточные моторы постоянного тока 5. Униполярное и биполярное соединение обмоток 2-х фазных шаговых двигателей. Двигатель преобразует электрическую энергию в механическую. Шаговый двигатель преобразует электрические импульсы в направленные вращающие перемещения. Движения, которые создаются каждым импульсом, являются точными и повторяющимися, поэтому шаговые двигатели очень эффективны для позиционирования.
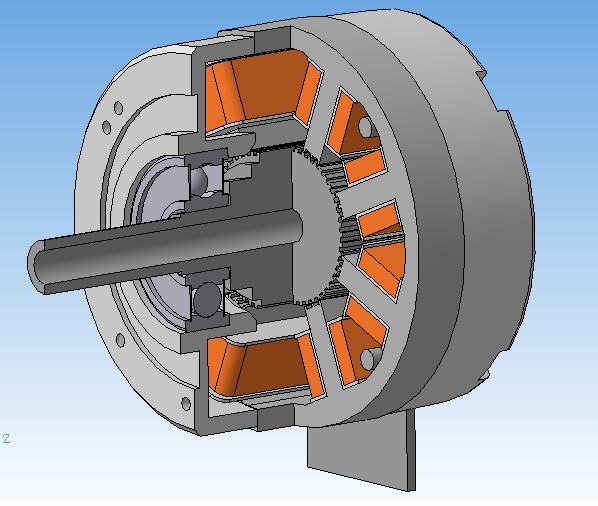
Шаговые двигатели с постоянными магнитами состоят из ротора с постоянным магнитом, катушки и магнитопровода статора. Возбуждение обмотки создает направленное электромагнитное поле. Магнитное поле может изменятся путем последовательного «пошагового» возбуждения обмоток статора, которые генерируют вращательное движение.
На рисунке 1 показана типичная шаговая последовательность для двухфазного двигателя. На первом шаге только фаза А из двух фаз находится под напряжением. Ротор магнитно блокирован в показанном положении, так как противоположные полюса притягиваются. Когда отключается фаза А и включается фаза В, то ротор поворачивается по часовой стрелке на 90 градусов. На третьем шаге включается фаза А, но с противоположной полярностью в отличии от первого шага, что вызывает поворот еще на 90 градусов. На четвертом шаге фаза А выключается и включается фаза В с полярностью противоположной шагу 2.
На первом шаге только фаза А из двух фаз находится под напряжением. Ротор магнитно блокирован в показанном положении, так как противоположные полюса притягиваются. Когда отключается фаза А и включается фаза В, то ротор поворачивается по часовой стрелке на 90 градусов. На третьем шаге включается фаза А, но с противоположной полярностью в отличии от первого шага, что вызывает поворот еще на 90 градусов. На четвертом шаге фаза А выключается и включается фаза В с полярностью противоположной шагу 2.
Повторяя эту последовательность ротор вращается с шагом в 90 градусов по часовой стрелке. Однако, в каждый момент времени включается лишь полярность показанная на рисунке 2. Двигатель также может вращаться с половинным шагом путем вставки выключенного состояния при переходе между фазами.
Таким образом, полный угол шага делится пополам. Например, двигатель с шагом 90 градусов будет двигаться с углом 45 градусов на каждой половине шага. Так, одна из обмоток не питается на протяжении каждого меняющегося полушага, что приводит к уменьшению электромагнитной силы действующей на ротор, в результате чего происходит потеря момента.
В отличие от типичных приводов переменного тока используемых для управления скоростью , шаговые приводы и шаговые моторы используются в основном для управления положением. Типичная одноосевая шаговая система состоит из контроллера, шагового драйвера, шагового двигателя с или без редуктора и источника питания. Шаги обычно задаются двумя цифровыми входами: импульсным и битом направления. Один импульс на импульсном входе перемещает вал мотора на один шаг. Нижеприведенный график показывает зависимости механических и электрических параметров двигателей постоянного тока.
На нем показаны скорость n, ток I, выходная мощность Р и КПД в зависимости от момента М для данного напряжения питания. Скорость холостого хода не является функцией напряжения питания и достигается тогда, когда Е становится почти равным U; ток холостого хода I 0 является функцией от момента трения:.
Максимальная длительная выходная мощность определяется гиперболой разделяющей непрерывный и прерывистый диапазон работ. Его значение зависит от соотношения статического момента и момент трения и таким образом является функцией напряжения питания:. Максимальный постоянный момент зависит от рассеиваемой мощности I 2 R , его максимальное значение определяется выражением:.
Где T max — максимально допустимая температура якоря, T amb — температура окружающей среды, R max — сопротивление ротора при температуре T max и R th — полное термосопротивление ротор — корпус — окружающая среда. При данном моменте М, увеличение или уменьшение питающего напряжения будет увеличивать или уменьшать скорость. Функция скорость-момент изменяется пропорционально питающему напряжению U. Принцип работы такого мотора основан на том, что управляющий им контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был перпендикулярным вектору магнитного поля ротора.
С помощью широтно-импульсной модуляции ШИМ контроллер управляет током, протекающим через обмотки двигателя, и следовательно вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор двигателя.
Знак угла между векторами определяет направление момента действующего на ротор. Коммутация производится так, что поток возбуждения ротора — Ф 0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием датчика положения ротора ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя. В обычных коллекторных моторах коммутация производится механически с помощью токосъемника. В BLDC моторах коммутация производится в электронным способом. В этом случае необходимо знать мгновенное положение ротора для определения фазы для возбуждения.
Угловое положение ротора может определяться: — использованием датчика положения датчик Холла, оптический энкодер, резольвер — электрически, путем анализа противо-ЭДС незапитанных обмоток.
Простая логика позволяет оптимально подавать питание на фазы, как функция положения ротора, так же как коллекторный узел в обычных ДПТ. Положение ротора может быть также определено с помощью энкодера или резольвера.
Коммутация может быть организована очень просто, аналогично использованию датчиков Холла, или более сложно путем модуляции синусоидальных токов в трех фазах. Этот способ называется векторным управлением и его преимущество заключается в минимизации пульсации крутящего момента, а также высокого разрешения для точного позиционирования. Третий вариант не требующий датчика положения использует особенности электрических машин.
Двигатели с таким управлением не требуют наличия датчиков или электронных компонентов, и поэтому нечувствительны к агрессивной среде.
Это очень удобно для таких приложений, как ручные электроинструменты, где кабель питания постоянно перегибается и наличие всего трех проводов является преимуществом.
Принцип работы бездатчикового мотора очень прост. Во всех двигателях, отношение противо-ЭДС и крутящего момента для противоположного положения ротора одинаково. Пересечение напряжения, индуцируемого в невозбужденной обмотке, с нулем соответствует положению с максимальным вращающим моментом генерируемым двумя другими запитанными фазами.
Эта точка прохождения через ноль следовательно позволяет определить момент для следующей коммутации в зависимости от скорости мотора. Этот промежуток времени, на самом деле эквивалентен времени, которое требуется двигателю для перехода от позиции предыдущей комутации до позиции перехода противо-ЭДС нуля.
Электронные устройства разработанные для этих функций коммутации позволяют легко управлять бездатчиковыми моторами. С увеличением скорости, то есть частоты коммутации тока увеличивается реактивное сопростивление обмоток статора, и характеристика вентильного двигателя становится более чувствительна к перепадам нагрузки.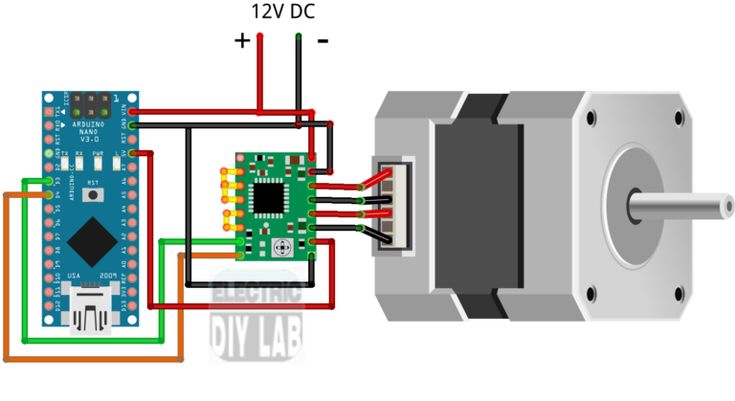 Зависимости скорости вращения от напряжения питания преобразователя для управления вентильным двигателем имеют вид:.
Зависимости скорости вращения от напряжения питания преобразователя для управления вентильным двигателем имеют вид:.
Так, например, для преобразователя BLDINTB2 итальянского производителя Intecno в технических характеристиках указаны пределы рабочего напряжения 20 — 36В постоянного тока. Важно понимать, что величина подводимого напряжения будет влиять на максимальную скорость вращения вентильного электродвигателя. Вследствие особенностей характеристик вентильного двигателя их можно использовать для механизмов, работающих на низких скоростях с высокой точностью.
Соединения Униполярное и Биполярное половина обмотки, из-за использования меньшего количества витков, не дает нам высокий крутящий момент на низких оборотах, но благодаря низкой индуктивности поддерживает момент до высоких скоростей. Биполярное последовательное соединение использует всю обмотку, это дает высокий крутящий момент на низких скоростях. Но из-за высокой индуктивности момент момент быстро спадает с увеличением скорости.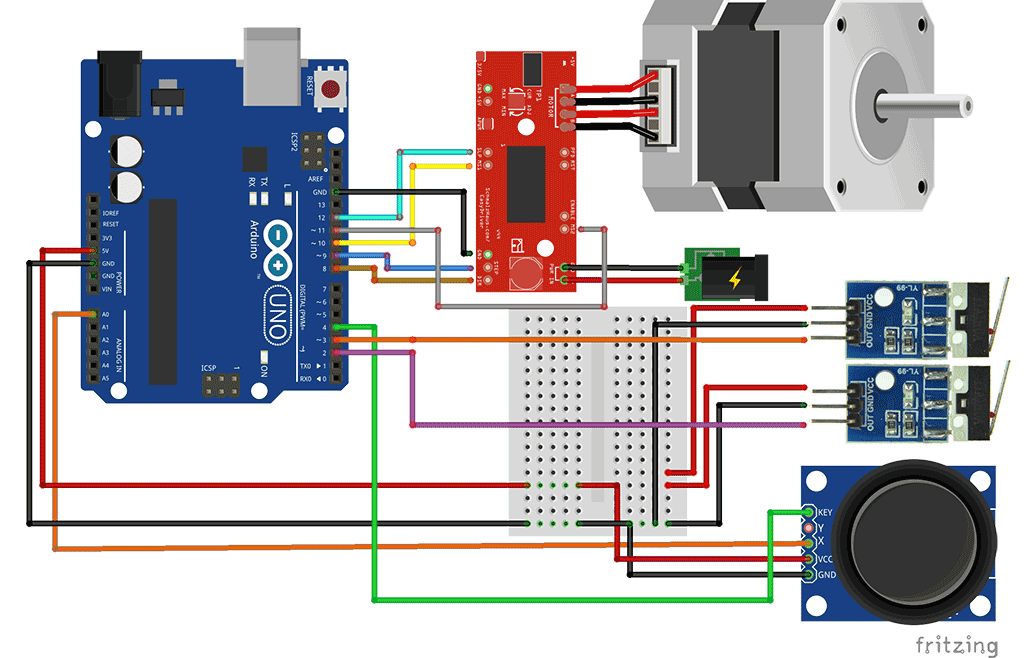 Биполярное паралельное соединение также использует полную обмотку, что дает хорошие низкоскоростные характеристики.
Биполярное паралельное соединение также использует полную обмотку, что дает хорошие низкоскоростные характеристики.
И низкая индуктивность такого соединения позволяет удерживать момент до высоких скоростей. Вверх страницы. Шаговые двигатели, приводы, контроллеры MotionKing. Новости СВ Альтера. Принцип работы бесщеточного двигателя постоянного тока. Шаговые двигатели, приводы, контроллеры MotionKing www. Теория 1. Униполярное и биполярное соединение обмоток 2-х фазных шаговых двигателей Шаговый двигатель Двигатель преобразует электрическую энергию в механическую.
Рисунок 1 — Шаговая последовательность. Однофазное переключение. Двухфазное переключение. Половинный шаг Двигатель также может вращаться с половинным шагом путем вставки выключенного состояния при переходе между фазами.
Устройство шагового двигателя
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора. Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной. У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной. У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Стоит помнить, что шаговый двигатель, принцип работы которого будет .. Гибридные синхронные двигатели используются промышленностью по.
Сравнение сервоприводов и шаговых двигателей
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Первые шаговые двигатели появились в х годах XIX века и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1]. Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. Таким образом по конструкции ротора выделяют следующие разновидности шагового двигателя [2] :. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. Таким образом по конструкции ротора выделяют следующие разновидности шагового двигателя [2] :. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Как работает шаговый двигатель?
В статье рассматриваются типы шаговых двигателей, особенности их применения и схемы несложных устройств управления, позволяющие оценить возможности и освоить этот тип двигателей на практике. Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров.
А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров.
Практически все электрические приборы функционируют с помощью приводных механизмов.
Шаговые двигатели
Служба распространения пресс-релизов. Рассылка Личный кабинет. Добавить пресс-релиз. Рассылка Личный кабинет Добавить свой пресс-релиз. Фондовые и валютные рынки. Новости эмитентов ЦБ Финансы и банки Обучение, образование, наука Добывающая промышленность PR, маркетинг, реклама Интернет Интерьер, дизайн, декор Недвижимость Безопасность Культурные события, спорт, шоу бизнес Рынки и торговля Мода, одежда, аксессуары, стиль Оборудование, техника Сфера услуг Страхование АПК и пищевая промышленность Нефть, газ, ГСМ Электроэнергетика, альтернативная энергетика Металлургия Химия и нефтехимия Связь и телекоммуникации Мебель и материалы Hi-tech компании Медицина и фармацевтика, красота и здоровье Машиностроение Транспорт, автомобили Строительство и строительные материалы Выставки.
Как работает шаговый электродвигатель?
Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода сервопривода разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства меньше элементов и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала. Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2]. Поэтому в задачах, где требуются высокие характеристики точность, быстродействие используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели. Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора.
стендом и принципами работы шагового двигателя». 57 . Фактически гибридный двигатель представляет собой двигатель с.
Шаговый электродвигатель
В современной электротехнике используется множество самых разнообразных устройств, некоторые из них предназначаются для автоматизации технологических операций. Таковым является и шаговый двигатель. Принцип работы и устройство данного прибора описаны в статье.
Шаговый двигатель
ВИДЕО ПО ТЕМЕ: Разгон трехфазного гибридного шагового двигателя
Чтобы тот или иной электрический прибор работал, ему требуется специальный приводной механизм. Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется. Шаговый двигатель может быть униполярным или биполярным. Он является электрическим и бесщеточным двигателем постоянно тока , способным делить полный оборот на несколько одинаковых шагов. В него входят такие детали:.
Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется. Шаговый двигатель может быть униполярным или биполярным. Он является электрическим и бесщеточным двигателем постоянно тока , способным делить полный оборот на несколько одинаковых шагов. В него входят такие детали:.
Шаговый двигатель — принцип работы Чтобы тот или иной электрический прибор работал, ему требуется специальный приводной механизм. Одним из таких механизмов является шаговый двигатель.
Шаговые двигатели — конструкция, принцип работы и применение
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем — везде, где необходима повышенная точность позиционирования. Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора неподвижного элемента и таким образом фиксирует ротор подвижную часть в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название. Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками.
Затем ток поступает в другую обмотку и ротор совершает новое движение. И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название. Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками.
Шаговый двигатель: особенности и принцип работы
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором.
механизм его действия и назначение, где и как применяется
Шаговые двигатели постоянного тока очень часто используют при работе с установками с числовым программным руководством и робототехнике. Главная отличительная особенность такого вида двигателя – это то, как именно действует.
Суть в том, что его работа не непрерывна, а осуществляется пошагово со сменой установленного угла оборота на один шаг. Так образом рабочий элемент имеет конкретный угол поворота в определенный момент, что позволяет контролировать процесс.
Питание такого мотора делимое, совершаемое импульсно. Именно импульсы и обеспечивают поворот вала на какой-то установленный угол.
В основном такие двигатели функционируют совместно с редуктором, который делает установку на валу максимально четкой и с энкодером, который определяет положение вала в данное время. Все эти детали нам нужны для передачи и меняет угол вращения.
Сегодня мы хотим поделиться с вами своими знаниями о данном типе механизмов, о том, как он работает и зачем нужен.
Конструкция шагового двигателя
Если классифицировать данный тип мотора, то его мы отнесем к бесколлекторному синхронному мотору, в составе которого присутствуют статор и ротор.
Ротор имеет раздельные отсеки, состоящие из электротехнической стали, имеет «зубатую» структуру, а они разграничены постоянными магнитами.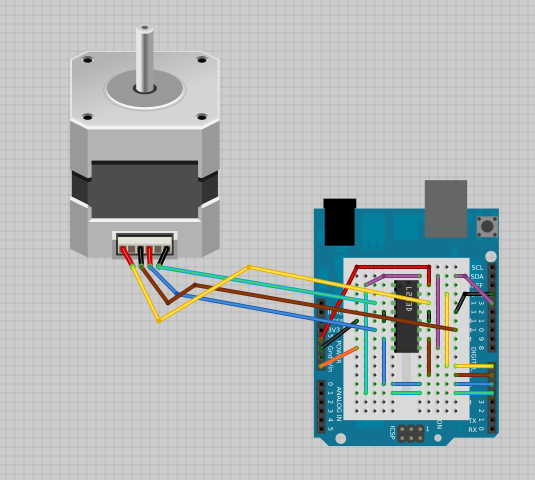 Статоре имеет специальные обмотки, которые схожи с катушками.
Статоре имеет специальные обмотки, которые схожи с катушками.
Как же это выглядит на деле?
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.
При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.
При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Обмотки бывают разные
В шаговых моторах используют биполярные или униполярные обмотки. Как это работает мы объясняли на примере биполярного устройства. Такой механизм предполагает применение отличных друг от друга фаз для снабжения обмоток.
Такая схема достаточно трудная, кроме того, для нее нужны сильные платы управления, которые стоят немалых денег.
Приборы с униполярными обмотками имеют более простой тип управления. Такие схемы имеют общий «плюс» подключения. На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
Каждый из этих типов имеет преимущества и недостатки. Биполярные шаговые моторы мощнее униполярных, их крутящий момент на сорок процентов превосходит униполярки, хотя вторые легче в управлении.
Типы двигателей по конструкции ротора
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много.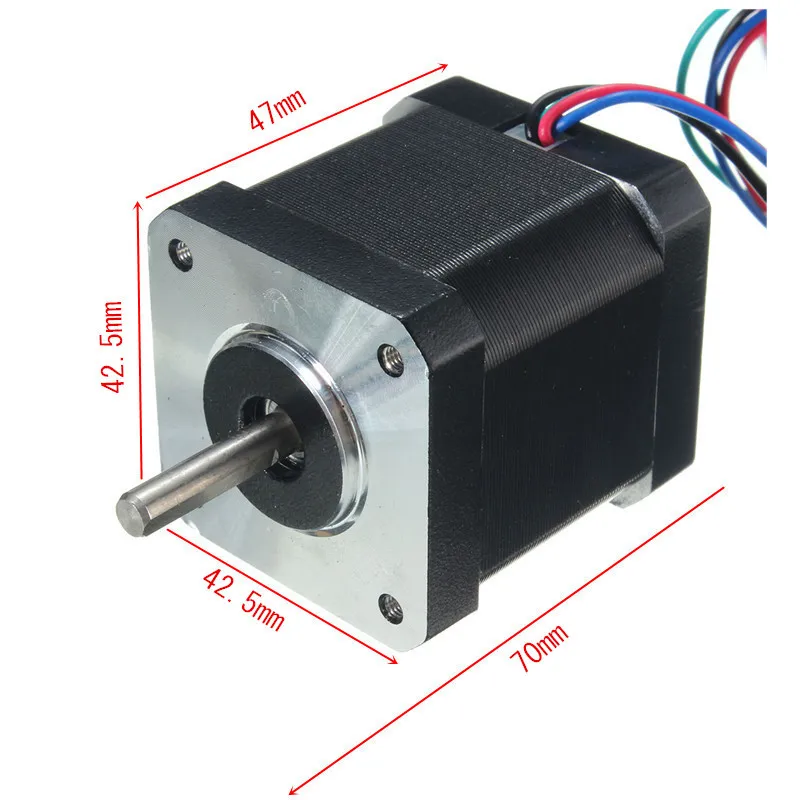 Они расположены на одном диске.
Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.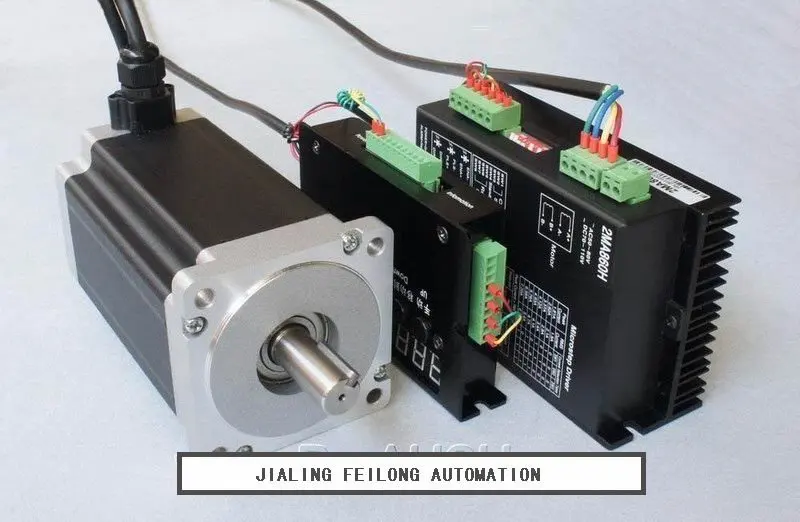
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей.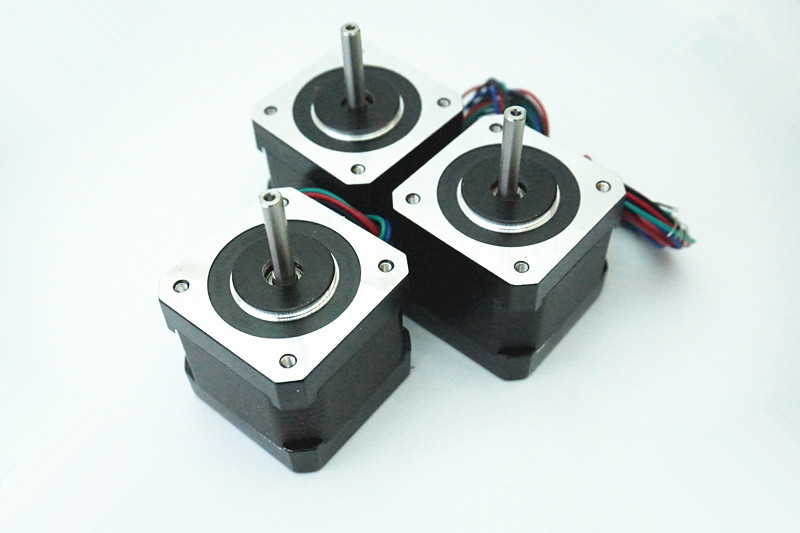 Но, есть одно «но» — цена.
Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.

Плюсы и минусы шаговых моторов
Смело запишем к преимуществам следующее:
- высокие скорости старта, тормоза и реверса;
- вал делает оборот в согласно команде главного устройства на указанный угол;
- точная фиксация позиции после тормоза;
- четкость установки позиции;
- максимальная надежность в связи с отсутствием коллектора;
- обеспечение наибольшего крутящего момента при низких скоростях.
Минусы:
- есть риск изменения позиции в случае перегрузки вала, которая превышает ПДК для шагового мотора;
- риск резонанса;
- трудности в управлении;
- низкая скорость оборотов, хотя это не совсем минус, так так ШД применяют не для обеспечения вращения, а для обеспечения определенных позиций элемента в конкретный момент.
Наш шаговый мотор имеет второе имя, которое дает максимальное описание устройства, а именно: «электродвигатель с конечным числом положений ротора». Их используют в новых устройствах, таких, как 3D-принтеры, роботы, станки.
Конкурентоспособной альтернативой для него есть сервопривод, хотя они оба имеют свою нишу использования, которая определяется случаем.
Шаговый двигатель для ЧПУ | Техника и человек
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
- Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
 Если мы в качестве примера рассмотрим мотор с переме
Если мы в качестве примера рассмотрим мотор с переме При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования.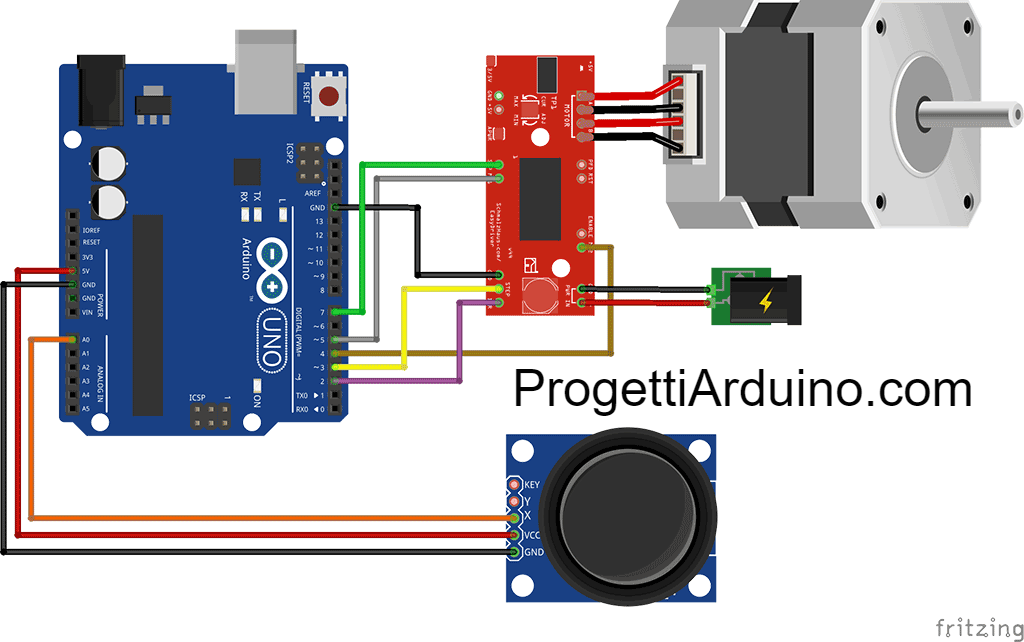 Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
 Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
 Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.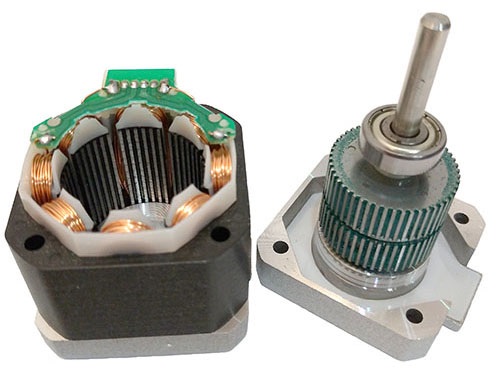 А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
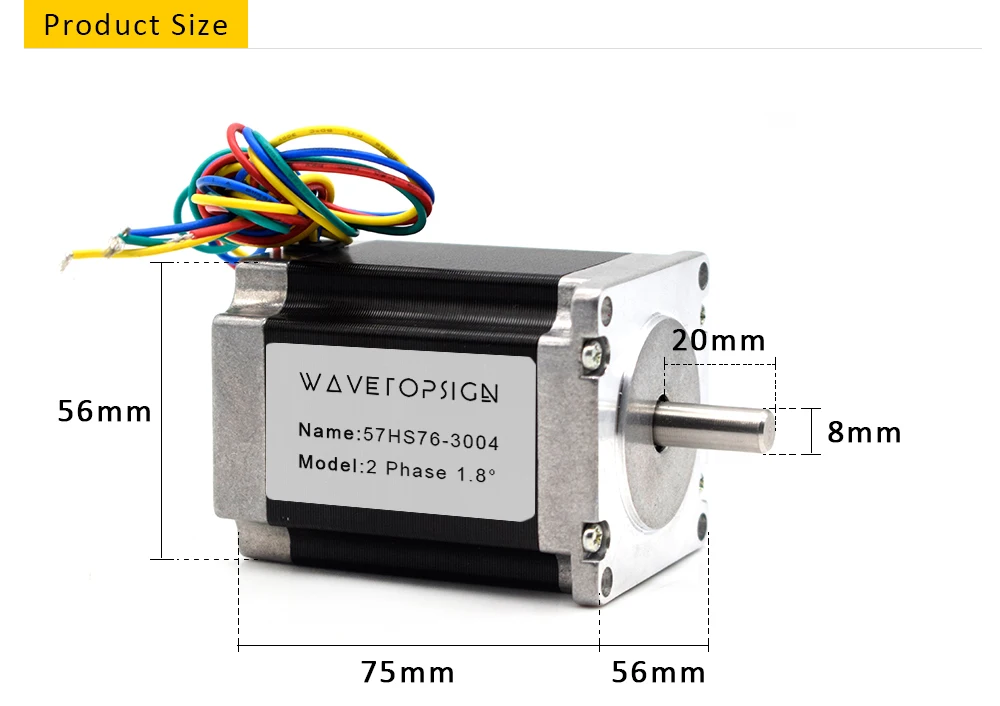
А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1. 7 7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.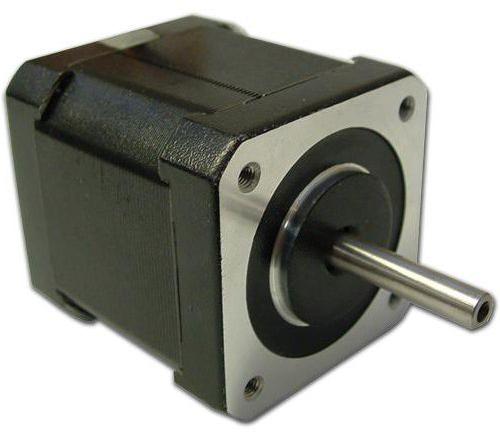 3±20% 3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода.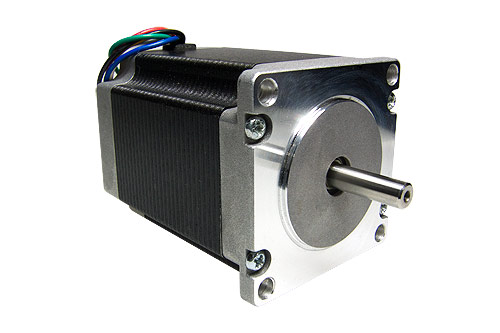 Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
Применение шаговых двигателей в станках с ЧПУ управлением
Применение шаговых двигателей
2016-09-02
Применение шаговых двигателей и сравнение двигателей.
В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.
Сегодня существуют три основных типа/вида шаговых двигателей
Серводвигатели
Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.
На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике. Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Для сервоприводов характерны показатели
Сравнение работы простого cерво и iагового двигателей
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).
Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине. Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».
В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Преимущества шагового двигателя
Преимущества серводвигатель
Выводы
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.
Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
какова разница и что выбрать? — MULTICUT
Обновлено: 31.08.2022
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.
Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Пройти тест
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене |
Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям
|
| Точность перемещений исполнительного органа |
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм. Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки |
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм. Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки |
| Время разгона и скорость перемещения портала |
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м. Время разгона — 120 об/мин за секунду |
Сервопривод может перемещать портал со скоростью более 60 м/мин. Время разгона составляет до 1000 об/мин за 0,2 секунды |
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |

Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
-
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
-
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
-
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки.
Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
-
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
-
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.

 Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также
Обновлено: 18.09.2022
Фрезерные станки с ЧПУ для малого бизнеса
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
Подробнее
Обновлено: 18.09.2022
Технические характеристики и сфера применения фрезерных станков с ЧПУ
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…
Подробнее
Обновлено: 18.09.2022
Фрезы для деревообрабатывающих станков с ЧПУ
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Подробнее
Обновлено: 06.09.2022
Характеристики шагового двигателя
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…
Подробнее
Обновлено: 06.09.2022
Специфика сверлильных станков с ЧПУ
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии. ..
..
Подробнее
Возврат к списку
Поделиться:
типов степперов | Все о шаговых двигателях
Типы степперов
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Существует множество типов шаговых двигателей, некоторые из которых требуют очень специализированных водителей. Для наших целей мы сосредоточимся на шаговых двигателях, которые можно управляется общедоступными драйверами. Это: шаговые двигатели с постоянными магнитами или гибридные, двухфазные биполярные или четырехфазные однополярные.
В первую очередь необходимо учитывать работу, которую должен выполнять двигатель. Как и следовало ожидать, более крупные двигатели способны развивать большую мощность. Размер шаговых двигателей варьируется от размера арахиса до огромных монстров NEMA 57.
Размер шаговых двигателей варьируется от размера арахиса до огромных монстров NEMA 57.
Большинство двигателей имеют номинальный крутящий момент. Это то, на что вам нужно обратить внимание, чтобы решить, достаточно ли у двигателя силы, чтобы делать то, что вы хотите.
NEMA 17 — это стандартный размер, используемый в 3D-принтерах и небольших станках с ЧПУ. Меньшие двигатели находят применение во многих робототехнических и аниматронных приложениях. Более крупные рамы NEMA распространены в станках с ЧПУ и в промышленных приложениях.
Номера NEMA определяют стандартные размеры лицевой панели для монтажа двигателя. Они не определяют другие характеристики двигателя. Два разных двигателя NEMA 17 могут иметь совершенно разные электрические или механические характеристики и не обязательно являются взаимозаменяемыми.
Следующее, на что следует обратить внимание, это требуемое разрешение позиционирования. Количество шагов на оборот варьируется от 4 до 400. Обычно доступны 24, 48 и 200 шагов.
Обычно доступны 24, 48 и 200 шагов.
Разрешение часто выражается в градусах на шаг. Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов.
Платой за высокое разрешение является скорость и крутящий момент. Двигатели с большим числом шагов работают на более низких оборотах, чем двигатели аналогичного размера. А более высокая частота шагов, необходимая для вращения этих двигателей, приводит к более низкому крутящему моменту, чем двигатель аналогичного размера с малым числом шагов при аналогичных скоростях.
Еще одним способом достижения высокого разрешения позиционирования является передача. Зубчатая передача 32: 1, подаваемая на выход двигателя с 8 шагами / оборотами, приведет к двигателю с 256 шагами.
Зубчатая передача также увеличивает крутящий момент двигателя. Некоторые крошечные шаговые двигатели с редуктором способны развивать впечатляющий крутящий момент. Но компромисс, конечно, скорость. Редукторные шаговые двигатели обычно ограничиваются приложениями с низкими оборотами.
Люфт — еще одна проблема мотор-редукторов. Когда двигатель меняет направление, он должен компенсировать любую слабину, которая может быть в зубчатой передаче. Это может повлиять на точность позиционирования.
Еще одна вещь, которую следует учитывать, — это то, как двигатель будет взаимодействовать с остальной системой привода. Доступны двигатели с различными типами валов:
- Круглый или D-образный вал : Они доступны в различных стандартных диаметрах, и существует множество шкивов, шестерен и муфт валов, разработанных для соответствия. Валы «D» имеют одну плоскую сторону, чтобы предотвратить проскальзывание. Это желательно, когда задействованы высокие крутящие моменты.
- Вал-шестерня : На некоторых валах прямо врезаны зубья шестерни. Обычно они предназначены для сопряжения с модульными зубчатыми передачами.
- Вал ходового винта : Двигатели с валом ходового винта используются для создания линейных приводов. Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах.
 Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах.
Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах. Существует множество вариантов подключения шагового двигателя. Для наших целей мы сосредоточимся на шаговых двигателях, которыми можно управлять с помощью общедоступных драйверов. Это шаговые двигатели с постоянными магнитами или гибридные, подключенные как 2-фазные биполярные или 4-фазные униполярные.
Шаговый двигатель может иметь любое количество катушек. Но они соединены в группы, называемые «фазами». Все катушки в фазе находятся под напряжением вместе.
Униполярные драйверы всегда подают питание на фазы одинаковым образом. Одно отведение, «общее» отведение, всегда будет отрицательным. Другой вывод всегда будет положительным. Униполярные драйверы могут быть реализованы с помощью простой транзисторной схемы. Недостатком является то, что доступный крутящий момент меньше, потому что только половина катушек может быть запитана одновременно.
Драйверы Bipolar используют схему H-моста, чтобы фактически изменить направление тока, протекающего по фазам. При подаче питания на фазы с чередованием полярности все катушки можно заставить работать, вращая двигатель.
Двухфазный биполярный двигатель имеет 2 группы катушек. Четырехфазный униполярный двигатель имеет 4 провода. Двухфазный двухполярный двигатель будет иметь 4 провода — по 2 на каждую фазу. Некоторые двигатели поставляются с гибкой проводкой, которая позволяет использовать двигатель как биполярный, так и униполярный.
5-проводной двигатель
Этот тип распространен в небольших униполярных двигателях. Все общие провода катушки связаны внутри и выведены как 5-й провод. Этот двигатель может работать только как униполярный двигатель.
6-проводной двигатель
Этот двигатель подключается только к общим проводам двух парных фаз. Эти два провода можно соединить для создания 5-проводного униполярного двигателя.
Или вы можете просто игнорировать их и относиться к этому как к биполярному двигателю!
8-проводной двигатель
8-проводной униполярный двигатель является наиболее универсальным двигателем из всех. Его можно вести несколькими способами:
- 4-х фазный однополюсный — Все общие провода соединены вместе — как у 5-ти проводного двигателя.
- 2-фазный последовательный биполярный — Фазы соединены последовательно — так же, как 6-проводной двигатель.
- 2-фазный параллельный биполярный — Фазы соединены параллельно. Это приводит к уменьшению сопротивления и индуктивности в два раза, но требует удвоения тока для возбуждения. Преимуществом такой проводки является более высокий крутящий момент и максимальная скорость.
Что такое шаговый двигатель? Управление шаговым двигателем
Это руководство было впервые опубликовано 05 мая 2014 г. Оно было последним
обновлено 05 мая 2014 г.
Оно было последним
обновлено 05 мая 2014 г.
Эта страница (Типы степперов) последний раз обновлялась 04 октября 2022 г.
Текстовый редактор на базе tinymce.
Шаговые двигатели. Множество размеров и версий мощности.
Шаговые двигатели с обратной связью как альтернатива двигателям BLDC
Технология шаговых двигателей долгое время считалась экономичной альтернативой приложениям, не требующим высокой производительности, обеспечиваемой серводвигателями. Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
.
Эта тенденция была остановлена и даже обращена вспять в последние годы благодаря разработке управляемых шаговых двигателей с обратной связью. Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
В сочетании с более выгодной ценой системы шаговых двигателей, шаговые двигатели с обратной связью являются экономичной альтернативой сервосистемам. Тем не менее, системам с обратной связью не всегда удавалось вытеснить системы без обратной связи в традиционных приложениях с шаговыми двигателями, таких как автоматизация лабораторий или небольшие фрезерные станки с ЧПУ. Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Виртуальный энкодер заменяет реальный энкодер
Чтобы воспользоваться преимуществами ориентированного на поле управления в этих приложениях, Nanotec разработала бездатчиковое, т.е. без энкодера, управление шаговыми двигателями, в котором фактическое положение а скорость ротора определяется «виртуальным энкодером» в контроллере.
Системы без датчиков уже много лет используются в двигателях BLDC, особенно в вентиляторах и насосах, не требующих управления положением. Во всех бессенсорных системах используется физический эффект, заключающийся в том, что двигатель индуцирует противодействующее напряжение (противоЭДС) во время работы, которое пропорционально скорости.
Простейший безсенсорный контроль заключается в непосредственном измерении противо-ЭДС, когда катушка обесточена в цикле коммутации. Однако по сравнению со стандартной активацией этот метод требует специального оборудования и стабилен только прибл. 10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Все двигатели Plug & Drive от Nanotec реализуют управление, ориентированное на поле (замкнутый контур). BLDC и шаговые двигатели контролируются по полю в зависимости от нагрузки и отличаются только рабочими точками из-за разного количества полюсов. Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Отсутствие потерь на шаг, отсутствие резонансов
Критически важным фактором для качества контроллера на основе наблюдателя является хорошая модель используемого двигателя, как с точки зрения математических формул, так и с точки зрения констант двигателя подключенного двигателя.
Таким образом, перед нами стояла задача найти достаточно точную математическую модель двигателя, которую можно было бы полностью рассчитать в каждом цикле управления даже в небольшом микропроцессоре. В принципе, шаговые двигатели математически аналогичны двигателям BLDC, но имеют только две фазы вместо обычных трех фаз BLDC, а также демонстрируют некоторые особенности в модели на более высоких скоростях из-за большего количества полюсов.
Другим важным аспектом практического использования бездатчикового контроллера является идентификация параметров модели. Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Бессенсорная система от Nanotec, напротив, работает с очень небольшим количеством параметров, которые на самом деле не обязательно знать пользователю: процедура автоматической настройки измеряет подключенный двигатель и автоматически определяет все необходимые параметры.
В зависимости от типа двигателя информация о скорости и положении поступает в диапазоне от 100 до 250 об/мин. Эта информация столь же точна, как и у оптического энкодера с шагом 500 или 1000. Результирующее управление двигателем имеет такое же качество и крутящий момент, как и управление двигателем с помощью энкодера. Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Напротив, на высоких скоростях безсенсорная система работает лучше, чем поворотный энкодер, который всегда демонстрирует допуск на биение, что приводит к синусоидальной угловой ошибке. В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и погрешность угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
Управление на основе наблюдателя делает ненужным использование двигателей с очень высокой противо-ЭДС, но недостатком которых является высокая индуктивность и, следовательно, более низкая динамика. Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Сочетание разомкнутого и замкнутого контура
Бездатчиковое управление особенно удобно для шаговых двигателей, поскольку его можно использовать не только для управления скоростью, но и для позиционирования в сочетании с управлением без обратной связи. Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку обычно на низких скоростях в режиме разомкнутого контура проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.
Шаговые приводы и системы — Приводы шаговых двигателей
УПРАВЛЕНИЕ ДВИЖЕНИЕМ НА СКОРОСТИ ТЕХНОЛОГИИ™
1.877.737.8698
Валюта
USD — доллар США
- CAD — канадский доллар
877-378-0240
Свяжитесь с нами
Поиск
Поиск
Войти Свяжитесь с нами
Переключить навигацию
Шаговые системы (двигатель + привод) — это системы с разомкнутым контуром, которые принимают цифровые входные данные шага и направления, предоставляемые «индексатором» или «контроллером движения», который в основном представляет собой программируемый генератор импульсов.
Команды шага и направления обычно генерируются ПЛК (программируемый логический контроллер), генератором сигналов, ПК или программируемым контроллером движения.
Последовательность командных импульсов «переводится» в движение двигателя приводом («транслятором»). В результате получается очень экономичная полностью цифровая система Smart Motion.
Electromate является поставщиком шаговых приводов и систем, таких как микрошаговые драйверы, драйверы с осцилляторами и многое другое. Чтобы получить дополнительную информацию, поговорите со специалистом сегодня.
Полушаговые/полушаговые драйверы:
В полношаговом режиме гибридный шаговый двигатель делает шаг на нормальный угол шага (например, 200 шагов/оборот), заставляя двигатель вращаться на 1,8° за полный шаг, в то время как в полушаге двигатель поворачивается на 0,9° за полный шаг. Полношаговый режим обычно используется в приложениях, где характеристики крутящего момента и скорости менее важны, когда двигатель работает с фиксированной скоростью, а условия нагрузки четко определены.
Как правило, шаговые двигатели используются в полношаговом режиме для замены существующих систем шаговых двигателей и не используются в новых приложениях. В полушаговом режиме генерируются шаги, размер которых составляет половину нормального шага. Таким образом, этот режим обеспечивает вдвое большее разрешение, чем полношаговый режим.
Системы с шаговыми двигателями могут быть с разомкнутым или замкнутым контуром:
Система с разомкнутым контуром — Система, в которой не используется обратная связь для проверки достижения желаемого результата или выхода. Большинство систем с шаговыми двигателями работают в разомкнутом контуре.
Система с замкнутым контуром — Система, использующая обратную связь для проверки достижения желаемого результата или вывода. Например, устройство обратной связи, такое как энкодер, обычно используется для предоставления информации о положении или скорости контроллеру движения. Замыкание контура положения с помощью энкодера в системе с шаговым двигателем с разомкнутым контуром улучшает общую производительность системы, поскольку обеспечивает обнаружение опрокидывания, проверку положения и/или коррекцию траектории.
Замыкание контура положения с помощью энкодера в системе с шаговым двигателем с разомкнутым контуром улучшает общую производительность системы, поскольку обеспечивает обнаружение опрокидывания, проверку положения и/или коррекцию траектории.
Шаговые приводы, которые мы предлагаем:
Микрошаговые драйверы Шаговые двигатели обычно приводятся в действие микрошаговыми приводами. Микрошаговый драйвер подает питание на соответствующую обмотку шагового двигателя для создания крутящего момента. Он точно распределяет ток между фазами двигателя, таким образом позиционируя шаговый двигатель с меньшим шагом между полными шагами. Он обеспечивает более высокое разрешение, но с меньшим крутящим моментом. Микрошаг не увеличивает точность шага, но позволяет двигателю работать с меньшим шумом, минимизирует эффекты резонанса на низких скоростях и обеспечивает плавное вращение в широком диапазоне скоростей. Микрошаг обычно используется для увеличения разрешения двигателя. Степень улучшения зависит от точности шага двигателя.
Степень улучшения зависит от точности шага двигателя.
Подробнее
Драйверы с генераторамиГенератор — это устройство, которое используется для создания импульсов для управления шаговым двигателем с заданной скоростью. В микрошаговых драйверах генератор обычно встроен в аппаратную часть шагового привода.
В режиме осциллятора импульсный вход становится сигналом запуска/останова: когда этот сигнал установлен на низкий уровень, двигатель разгоняется до заданной скорости и поворачивается. Повышение входного высокого уровня (до 5 вольт) заставляет шаговый драйвер замедляться до состояния покоя.
Подробнее
Преимущества шагового привода:
Приводы и системы с шаговыми двигателями обеспечивают исключительный крутящий момент и точность. Они также:
|
|
Области применения:
Шаговые приводы могут использоваться в различных приложениях, в том числе:
|
|
Шаговый привод Продукция:
Позиции 1–30 из 61
Страница
- Вы сейчас читаете страницу 1
- Страница 2
- Страница 3
- Страница Следующий
Показывать
30 60 100 Все
на страницу
Сортировать по Должность наименование товара Цена Установить нисходящее направление
Позиции 1–30 из 61
Страница
- Вы сейчас читаете страницу 1
- Страница 2
- Страница 3
- Страница Следующий
Показывать
30 60 100 Все
на страницу
Сортировать по Должность наименование товара Цена Установить нисходящее направление
Поиск шаговых приводов по поставщику:
- Applied Motion Products
- ЭлектроКрафт, Инк.
- Хейдон Керк Motion Solutions
- Коллморген
Шаговые двигатели — Tipteh
Перейти к содержимомуШаговые двигателиИгорь Ликар2022-01-03T08:13:29+01:00
Шаговые двигатели представляют собой бесщеточные синхронные электромеханические детали, которые преобразуют электрические сигналы в механическое вращение вала. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение со скоростью вращения, прямо пропорциональной частоте импульсов. Каждый оборот двигателя делится на несколько шагов, и двигатель должен посылать импульс для каждого шага от контроллера. Положением двигателя можно управлять без какого-либо механизма обратной связи, если размер шагового двигателя соответствует применению.
Нужна помощь? Позвольте нам помочь вам.
Используйте только качественные шаговые двигатели для вашего приложения
Приводы с шаговыми двигателями используются в различных приложениях для позиционирования, подготовки, вращения и перемещения различных деталей или оборудования. Мы предлагаем шаговые двигатели от R.T.A. Group, которая является ведущей европейской компанией в области управления движением с более чем 45-летним опытом. За это время они создали сеть из 46 дистрибьюторов на 5 континентах и продали более 1 миллиона драйверов шаговых двигателей 9.0052
Мы предлагаем шаговые двигатели от R.T.A. Group, которая является ведущей европейской компанией в области управления движением с более чем 45-летним опытом. За это время они создали сеть из 46 дистрибьюторов на 5 континентах и продали более 1 миллиона драйверов шаговых двигателей 9.0052
Их компьютеризированная линия тестирования выполняет тестирование каждого диска двумя различными операциями, обеспечивая его качество. Квалифицированные инженеры компании обеспечивают профессиональную и быструю помощь и поддержку клиентов.
Хотите приобрести наше оборудование?
Преобразование импульсов во вращение вала
Шаговый двигатель преобразует каждый цифровой импульс в механическое перемещение. Каждый импульс заставляет двигатель поворачиваться на точный угол. В случае шагового двигателя с типичным разрешением 1,8° это означает, что вал двигателя делает 1 полный оборот после 200 импульсов или шагов (360°/1,8° = 200).
Ротор шагового двигателя состоит из магнита и двух зубчатых чашек ротора, каждая из которых обычно имеет 50 зубьев. Статор шагового двигателя имеет 8 радиально расположенных полюсов, которые выполнены из тонких магнитных пластин, изолированных друг от друга. На них 8 витков обмотки.
Статор шагового двигателя имеет 8 радиально расположенных полюсов, которые выполнены из тонких магнитных пластин, изолированных друг от друга. На них 8 витков обмотки.
Знакомство с преимуществами шаговых двигателей
- Угол поворота двигателя пропорционален входному импульсу.
- Точное позиционирование и повторяемость движения.
- Простота использования (установка и запуск),
- Универсальность использования (для различных применений),
- Отличная реакция на запуск/остановку/реверс.
- Простая конструкция,
- Высокая надежность и прочность (подходит для сложных условий).
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением) и высокий крутящий момент на низких скоростях.
- Низкая цена по сравнению с другими системами управления приводом.
- Низкие затраты на обслуживание.
Выберите идеальный принцип работы для вашего процесса
Полный шаг
Полный шаговый двигатель имеет 200 полных шагов на один оборот вала двигателя. Они работают с одной фазой, активируемой в данный момент времени, или с двумя фазами, активируемыми одновременно, с полным углом шага 1,8°.
Они работают с одной фазой, активируемой в данный момент времени, или с двумя фазами, активируемыми одновременно, с полным углом шага 1,8°.
При включении двух фаз крутящий момент двигателя на 30–40 % выше, чем при включении одной фазы.
Полный шаг, одна фаза
Полный шаг, двухфазный
Половина шага
Шаговый двигатель вращается со скоростью 400 шагов за один оборот, при этом на одну обмотку подается питание, а затем на две обмотки поочередно подается напряжение, заставляя ротор вращаться на половине пути, или 0,9°.
Хотя он обеспечивает примерно на 30% меньший крутящий момент, чем полношаговый режим, полушаговый режим обеспечивает более плавное движение, чем полношаговый режим.
Полушаговый
Микрошаг
Здесь полный шаг (1,8°) можно разбить на 256 микрошагов — чтобы сгладить вращение двигателя на малых скоростях. Контроллер шагового двигателя посылает 2 синусоидальных волны напряжения, сдвинутых по фазе на 90°, на обмотки двигателя.
Микрошаг используется в приложениях, требующих точного позиционирования и плавного движения на различных скоростях.
Микрошаг
Просто выполните следующие простые шаги
Полюса имеют 48 зубьев, т.е. на 2 меньше, чем у ротора. Соосность полюсов статора относительно ротора следующая (рис. 1): 2 полюса соосны, 2 полюса не соосны и 4 полюса наполовину соосны с ротором. Катушки статора представляют собой два независимых набора катушек (рис. 2).
При разработке приложения с шаговыми двигателями вам просто нужно выполнить следующие простые шаги:
Шаг 1Совмещенные красные полюса (полюса противоположной полярности притягиваются) и несовмещенные желтые полюса (полюса одной полярности отталкиваются) .
Этап 2 Ротор перемещается на зуб/4 или 1,8°, выравнивая синие полюса и не выравнивая зеленые полюса.
Ротор перемещается на 1,8°, совмещая оранжевые полюса и раздвигая красные.
Шаг 4Ротор перемещается на 1,8°, совмещая зеленые полюса и не совмещая синие.
Шаг 5Шаг 5 равен Шагу 1 . Так как ротор имеет 50 зубьев и перемещение зубьев происходит с каждым новым шагом (т. е. импульсом от контроллера привода), общее количество шагов на один полный оборот вала составляет 200.
Выберите правильный шаговый двигатель
R.T.A. предлагает вам огромный ассортимент шаговых двигателей, чтобы вы могли выбрать идеальное решение для своего приложения.
Выберите среди:
Шаговый двигатель с разомкнутым контуром Шаговые двигатели по своей сути являются устройствами с разомкнутым контуром, способными выполнять точные движения без обратной связи относительно положения двигателя, т. е. без устройств измерения положения. Его вал вращается, совершая шаги, то есть перемещаясь на фиксированное количество градусов. Эта функция достигается благодаря внутренней структуре двигателя и позволяет узнать точное угловое положение вала, просто подсчитав, сколько шагов было выполнено, без необходимости использования датчика. Таким образом, положение можно точно контролировать, если размер шагового двигателя соответствует требованиям приложения.
е. без устройств измерения положения. Его вал вращается, совершая шаги, то есть перемещаясь на фиксированное количество градусов. Эта функция достигается благодаря внутренней структуре двигателя и позволяет узнать точное угловое положение вала, просто подсчитав, сколько шагов было выполнено, без необходимости использования датчика. Таким образом, положение можно точно контролировать, если размер шагового двигателя соответствует требованиям приложения.
Шаговые двигатели с энкодером, встроенным на вал, используют обратную связь энкодера для точного управления как скоростью, так и положением. Шаговые двигатели с замкнутым контуром используются, если потеря положения может иметь катастрофические последствия для приложения, но система требует высокого крутящего момента при низкой скорости, относительно простой архитектуры и относительно низкой стоимости (по сравнению с настоящей серводвигательной системой).
На валу шаговых двигателей может быть установлен тормоз, обеспечивающий более высокий удерживающий момент при остановленном двигателе.
Щелкните здесь, чтобы загрузить брошюру
Ознакомьтесь с применением шаговых двигателей
- XY-позиционирующие столы,
- Хранение, системы Pick & Place,
- Оборудование для этикеток и оборудования для упаковочных систем ,
- Различные транспортно-логистические системы (внутренние перемещения, ориентация),
- Системы наведения и выравнивания (угловые и линейные),
- Системы для замены форматных частей или инструментов,
- Измерительные и лабораторные инструменты,
- Конвейерные ленты,
- …
Какие машины вы можете разработать?
- Упаковочные машины и этикетировочное оборудование,
- Машины для розлива жидкостей и порошкообразных продуктов,
- Машины для резки пластика, металлов, дерева, керамики, стекла, камня и кожи,
- Shaping Machines,
- Robots,
- Laboratory Instruments,
- 2D & 3D Printers,
- …
Read the latest Drives news
Žan Kovačič2022-09-01T09:17:18 +02:00
Драйверы шаговых двигателей с Modbus TCP/IP
Драйверы шаговых двигателей подключаются к устройствам с протоколом Modbus TCP/IP, обеспечивая синхронизированную работу и более короткое время отклика.
Simona Prevorčnik2022-03-17T13:17:00+01:00
Преобразователь частоты Yaskawa для промышленного применения
Гибкий и простой преобразователь повысит вашу производительность, энергоэффективность и сократит общие затраты благодаря улучшенной совместимости с окружающей средой.
Simona Prevorčnik2022-01-27T08:22:58+01:00
Приводы переменного тока Yaskawa для крановых установок
Используйте конструктивные преимущества приводов переменного тока CR700 для снижения капиталовложений в заводское строительство, повышения производительности и снижения энергопотребления .
Симона Преворчник2021-12-08T07:47:57+01:00
Приводы серии ADW от R.T.A.
Воспользуйтесь преимуществами приводов серии ADW от R.T.A. для простого подключения к ПЛК и надежного управления скоростью шагового двигателя при экономии до 70 % места.
Симона Преворчник2021-12-20T09:36:32+01:00
Драйверы двигателей серии X-PLUS от R.T.A.
Используйте драйверы серии X-PLUS для точной, бесшумной и плавной работы шагового двигателя с питанием непосредственно от основного источника переменного тока.
Simona Prevorčnik2022-01-31T09:20:26+01:00
Сервоприводы Yaskawa Сервоприводы серии Sigma-7
Запустите Sigma-7 за несколько минут и воспользуйтесь преимуществами быстрого, специализированного привода настройки для вашего промышленного сервопривода.
Подпишитесь на нашу рассылку!
Вы будете получать только качественные новости и напоминания о вебинарах о ведущем оборудовании для автоматизации, чтобы сокрушить своих конкурентов.
Я прочитал и согласен с условиями.
Ссылка для загрузки страницыШаговые двигатели — Шаговые двигатели марки TorquePower™
Серия шаговых двигателей ElectroCraft TorquePower™ установила
Стандарт качества, надежности и долговечности шаговых двигателей.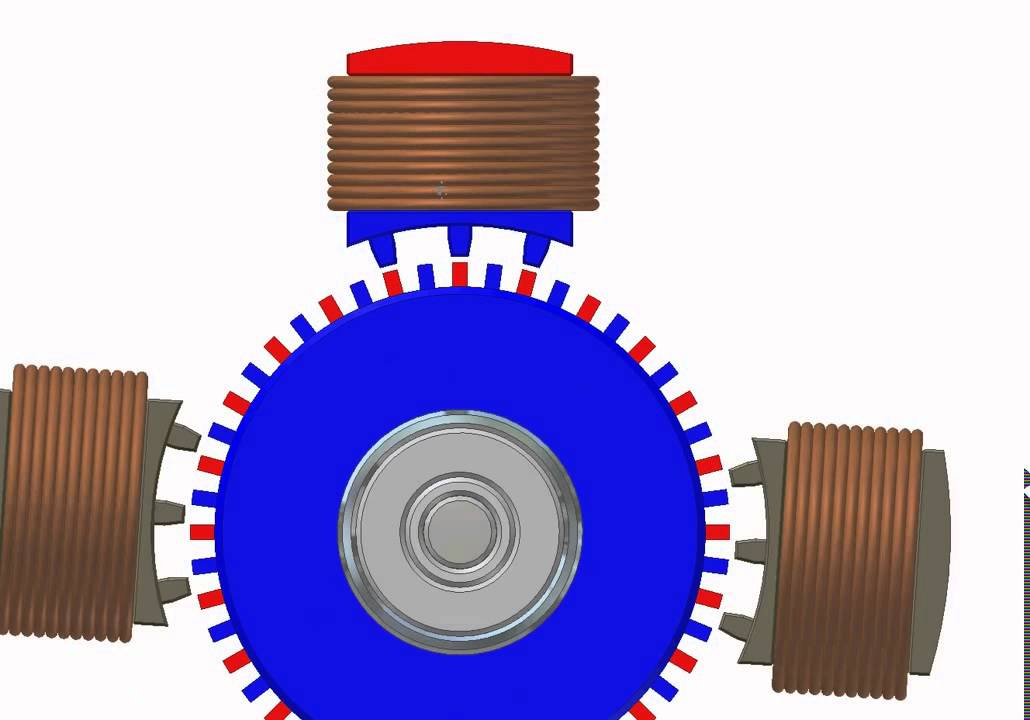 Точность наших двигателей TorquePower сравнима только с
надежность их работы. Все двигатели TorquePower
двунаправленный и полностью закрытый с постоянно смазываемым шариком
подшипники для долговечной и плавной работы. Подробнее ▸
Точность наших двигателей TorquePower сравнима только с
надежность их работы. Все двигатели TorquePower
двунаправленный и полностью закрытый с постоянно смазываемым шариком
подшипники для долговечной и плавной работы. Подробнее ▸
Для дополнительной мощности и надежности попробуйте наш TorquePower Enhanced моторы.
- Шаговый двигатель TorquePower™
- Шаговый двигатель TorquePower™ Plus
- Усовершенствованный шаговый двигатель TorquePower™
Шаговый двигатель TorquePower™
Линейка TorquePower (TP) от ElectroCraft представляет собой более дорогой шаговый двигатель, который включает экологические защита для тех применений, где герметичный корпус нужно.
TP23: герметичный шаговый двигатель NEMA 23 1,8°
Размер: Nema 23, 1,8°
Удерживающий момент: до 210 унций на дюйм или 148 Н·см
Скорость: до 85 об/секПосмотреть продукт
TP34: герметичный шаговый двигатель NEMA 34 1,8°
Размер: Nema 34, 1,8°
Удерживающий момент: до 620 унций на дюйм или 438 Н·см
Скорость: до 34 об/секПосмотреть продукт
TP42: герметичный шаговый двигатель NEMA 42 1,8°
Размер: Nema 42, 1,8°
Удерживающий момент: до 2100 унций на дюйм или 1482,81 Н·см
Скорость: до 24 об/секПосмотреть продукт
Шаговый двигатель TorquePower™ Plus
Наша линейка TorquePower Plus (TPP) — самая производительная и самая низкая
стоимость полной линейки шаговых двигателей. Они сверхпрочные, изготовлены
для приложений, управляемых движением, и для тех специальных операций, где
вам нужно немного больше крутящего момента.
Они сверхпрочные, изготовлены
для приложений, управляемых движением, и для тех специальных операций, где
вам нужно немного больше крутящего момента.
TPP11M: шаговый двигатель NEMA 11 1,8°
Размер: Nema 11, 1,8°
Удерживающий момент: до 18 унций на дюйм или 13 Н·см
Скорость: до 140 об/сПосмотреть продукт
TPP17: Шаговый двигатель NEMA 17 1,8°
Размер: Nema 17, 1,8°
Удерживающий момент: до 58 унций на дюйм или 41 Н·см
Скорость: до 80 об/сПосмотреть продукт
TPP23: Шаговый двигатель NEMA 23 1,8°
Размер: Nema 23, 1,8°
Удерживающий момент: до 240 унций на дюйм или 169 Н·см
Скорость: до 90 об/сПосмотреть продукт
TPP34: Шаговый двигатель NEMA 34 1,8°
Размер: Nema 34, 1,8°
Удерживающий момент: до 1190 унций на дюйм или 840 Нсм
Скорость: до 35 об/секПосмотреть продукт
Шаговый двигатель TorquePower™ Enhanced
Линейка двигателей TorquePower Enhanced (TPE) обеспечивает повышенный удерживающий момент и
улучшенные характеристики на низких скоростях по сравнению с нашей линейкой TorquePower Plus. Серия TPE
в настоящее время доступны размеры NEMA 11, 17 и 23.
Серия TPE
в настоящее время доступны размеры NEMA 11, 17 и 23.
TPE11M: шаговый двигатель NEMA 11 1,8°
Размер: Nema 11, 1,8°
Удерживающий момент: до 16 Нсм или 23 унций на дюйм
Скорость: до 100 об/секПосмотреть продукт
TPE17: шаговый двигатель NEMA 17 1,8°
Размер: Nema 17, 1,8°
Удерживающий момент: до 78 унций на дюйм или 55 Н·см
Скорость: до 80 об/сПосмотреть продукт
TPE23: Шаговый двигатель NEMA 23 1,8°
Размер: Nema 23, 1,8°
Удерживающий момент: до 294 унции на дюйм или 208 Нсм
Скорость: до 50 об/секПосмотреть продукт
Руководство по выбору шаговых двигателей
Преимущества
- Угол поворота двигателя пропорционален входным импульсам.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
- Точное позиционирование и повторяемость движения, поскольку точность большинства шаговых двигателей составляет 3–5 % от шага, и эта ошибка не накапливается от одного шага к другому.
- Отличный отклик на запуск, остановку и реверс.
- Чрезвычайно надежен, так как в двигателе нет контактных щеток, поэтому срок службы двигателя в основном зависит от срока службы подшипников.
- Реакция двигателей на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной.
- Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, которая напрямую связана с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.

Недостатки
- При неправильном контроле могут возникнуть резонансы.
- Двигатель неудобен в эксплуатации на очень высоких скоростях, 3000+ об/мин.
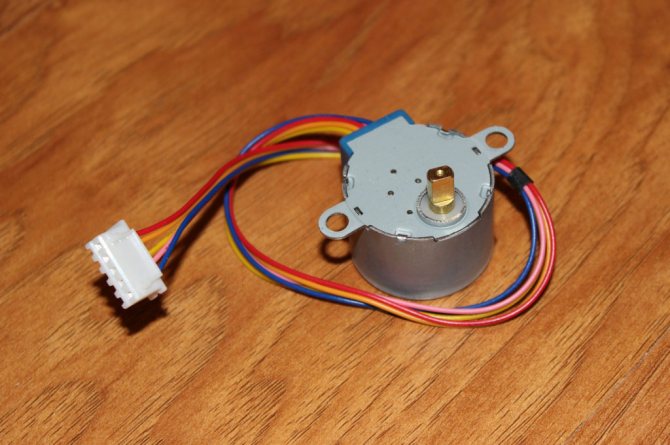
Существует три основных типа шаговых двигателей. Это:
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель с постоянными магнитами
- Гибридный шаговый двигатель
Шаговый двигатель с переменным сопротивлением (VR)
Этот тип шагового двигателя используется уже давно. Вероятно, его легче всего понять со структурной точки зрения. Этот тип двигателя состоит из многозубчатого ротора из мягкого железа и обмотки статора. Когда обмотки статора питаются постоянным током, полюса намагничиваются, вращение происходит, когда зубья ротора притягиваются к полюсам статора, находящимся под напряжением.
Шаговый двигатель с постоянными магнитами (PM)
Шаговый двигатель с постоянными магнитами, который часто называют «консервным» или «баночным», представляет собой недорогой двигатель с низким разрешением и типичным углом шага 7,5°. до 15° (48 – 24 шага/оборот). Двигатели с постоянными магнитами, как следует из названия, имеют постоянные магниты, добавленные к конструкции двигателя. Ротор больше не имеет зубьев, как в двигателе VR, вместо этого ротор намагничен чередующимися северным и южным полюсами, расположенными по прямой линии, параллельной валу ротора. Эти намагниченные полюса ротора обеспечивают повышенную интенсивность магнитного потока, благодаря чему двигатель с постоянными магнитами демонстрирует улучшенные характеристики крутящего момента по сравнению с двигателем типа VR.
до 15° (48 – 24 шага/оборот). Двигатели с постоянными магнитами, как следует из названия, имеют постоянные магниты, добавленные к конструкции двигателя. Ротор больше не имеет зубьев, как в двигателе VR, вместо этого ротор намагничен чередующимися северным и южным полюсами, расположенными по прямой линии, параллельной валу ротора. Эти намагниченные полюса ротора обеспечивают повышенную интенсивность магнитного потока, благодаря чему двигатель с постоянными магнитами демонстрирует улучшенные характеристики крутящего момента по сравнению с двигателем типа VR.
Двумя наиболее часто используемыми типами шаговых двигателей являются двигатели с постоянными магнитами и гибридные двигатели. Вообще говоря, гибридный шаговый двигатель может быть лучшим выбором наряду со снижением стоимости, поскольку он обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости.
II. ВЫБОР ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель может быть хорошим выбором, когда требуется контролируемое движение.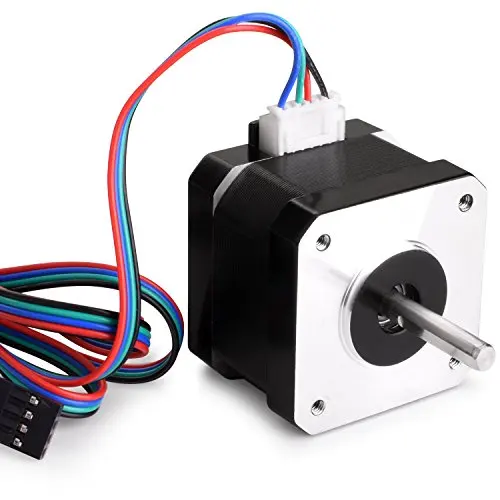 Их можно использовать в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронность. Благодаря преимуществам, перечисленным ранее, шаговые двигатели нашли свое применение во многих различных приложениях. Некоторые из них включают принтеры, плоттеры, координатные столы, лазерные резаки, гравировальные станки, устройства для захвата и так далее.
Их можно использовать в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронность. Благодаря преимуществам, перечисленным ранее, шаговые двигатели нашли свое применение во многих различных приложениях. Некоторые из них включают принтеры, плоттеры, координатные столы, лазерные резаки, гравировальные станки, устройства для захвата и так далее.
При выборе шагового двигателя для вашего приложения необходимо учитывать несколько факторов:
- Как двигатель будет связан с нагрузкой?
- Как быстро груз должен двигаться или ускоряться?
- Какой крутящий момент требуется для перемещения груза?
- Какая степень точности требуется при позиционировании груза?
Фазы, полюса и углы шаговых двигателей
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели. Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют «четырехфазным двигателем», хотя у него всего две фазы. Двигатели с двумя отдельными обмотками на фазу могут работать как в биполярном, так и в униполярном режиме.
Иногда шаговый двигатель называют «четырехфазным двигателем», хотя у него всего две фазы. Двигатели с двумя отдельными обмотками на фазу могут работать как в биполярном, так и в униполярном режиме.
Полюс можно определить как одну из областей в намагниченном теле, где сосредоточена плотность магнитного потока. И ротор, и статор шагового двигателя имеют полюса. Шаговый двигатель гибридного типа имеет ротор с зубьями. Ротор разделен на две части, разделенные постоянным магнитом, образующим половину зубьев с южным полюсом и половину с северным полюсом. Количество пар полюсов равно количеству зубьев на одной из половин ротора. Статор гибридного двигателя также имеет зубцы для создания большего количества эквивалентных полюсов (меньший шаг полюсов, количество эквивалентных полюсов = 360/шаг зубьев) по сравнению с основными полюсами, на которых намотаны катушки обмотки. Обычно 4 основных полюса используются для гибридов 3,6° и 8 для 1,8° и 0,9°.° виды.
Следующее уравнение показывает взаимосвязь между количеством полюсов ротора, эквивалентными полюсами статора, количеством фаз и углом полного шага шагового двигателя.
Угол шага = 360/(NPh/Ph) = 360/N
Где:
NPh = количество эквивалентных полюсов на фазу = количество полюсов ротора
Ph = количество фаз
7 N Общее количество полюсов для всех фаз вместе = NPh/Ph
Если шаг зубьев ротора и статора неодинаков, существует более сложная взаимосвязь.
Размер
Шаговые двигатели классифицируются не только по углу шага, но и по размеру корпуса, который соответствует размеру корпуса двигателя. Например, шаговый двигатель NEMA размера 11 имеет размер корпуса примерно 1,1 дюйма (28 мм). Точно так же шаговый двигатель NEMA размера 23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может варьироваться от двигателя к двигателю в рамках одной и той же классификации размеров корпуса. Вообще говоря, доступный крутящий момент двигателя определенного размера рамы будет увеличиваться с увеличением длины корпуса.
Крутящий момент
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, тепловыделения двигателя, рабочего цикла, обмотки двигателя и типа используемого привода.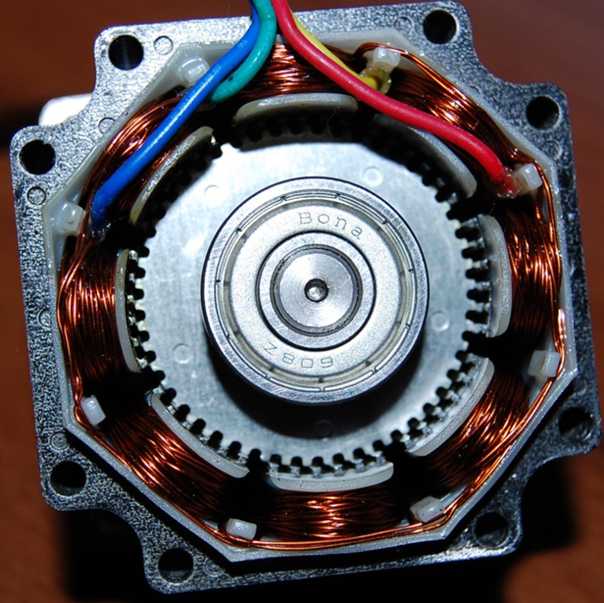 Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек резонанса собственных колебаний могут быть обнаружены либо по звуку, либо с помощью датчиков вибрации. Полезный крутящий момент шагового двигателя может быть резко снижен за счет резонансов. Следует избегать операций на резонансных частотах. Для уменьшения эффекта резонанса можно использовать внешнее демпфирование, дополнительную инерцию или микрошаговый привод.
Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек резонанса собственных колебаний могут быть обнаружены либо по звуку, либо с помощью датчиков вибрации. Полезный крутящий момент шагового двигателя может быть резко снижен за счет резонансов. Следует избегать операций на резонансных частотах. Для уменьшения эффекта резонанса можно использовать внешнее демпфирование, дополнительную инерцию или микрошаговый привод.
В шаговом двигателе крутящий момент возникает, когда магнитные потоки ротора и статора смещаются друг относительно друга. Интенсивность магнитного потока и, следовательно, крутящий момент пропорциональны количеству витков обмотки и току и обратно пропорциональны длине пути магнитного потока. По мере увеличения скорости вращения время, необходимое для нарастания тока, становится значительной частью интервала между шаговыми импульсами. Это снижает средний уровень тока, поэтому крутящий момент будет падать на более высоких скоростях.
Разрешение и точность позиционирования
На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шагового двигателя (полная длина шага шагового двигателя), выбранный режим привода (полный шаг, полушаг). шаг или микрошаг) и скорость передачи. Это означает, что существует несколько различных комбинаций, которые можно использовать для получения желаемого разрешения. Из-за этого проблема разрешения конструкции шагового двигателя обычно может быть решена после определения размера двигателя и типа привода.
III. ОБЫЧНЫЕ ЭТАПЫ ВЫБОРА
1. Определение компонента приводного механизма
Определите механизм и требуемые характеристики. Во-первых, определите некоторые особенности конструкции, такие как механизм, приблизительные размеры, пройденные расстояния и период позиционирования.
2. Рассчитайте требуемое разрешение
Найдите требуемое для двигателя разрешение. По требуемому разрешению определите, будет ли использоваться только двигатель или мотор-редуктор. Однако, используя технологию микрошага, достижение необходимого разрешения становится очень простым.
Однако, используя технологию микрошага, достижение необходимого разрешения становится очень простым.
3. Определите режим работы
Определите режим работы, отвечающий требуемым спецификациям. Найдите период разгона (торможения) и скорость рабочего импульса, чтобы рассчитать момент ускорения.
4. Рассчитайте требуемый крутящий момент
Рассчитайте момент нагрузки и момент ускорения и найдите требуемый крутящий момент двигателя.
5. Выберите двигатель
Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите двигатель, который будет использоваться, по характеристикам скорость-момент.
6. Проверьте выбранный двигатель
Подтвердите коэффициент ускорения/замедления и коэффициент инерции.
IV. ШАГОВЫЕ ДВИГАТЕЛИ КОМПАНИИ MOTION CONTROL PRODUCTS
Продукты Motion Control предлагают множество серий шаговых двигателей, таких как 2-фазные шаговые двигатели и 3-фазные шаговые двигатели (от NEMA типоразмера 8 до 42).