
Ардуино: управление двигателем постоянного тока, L293D | Класс робототехники
Ардуино: управление двигателем постоянного тока, L293D
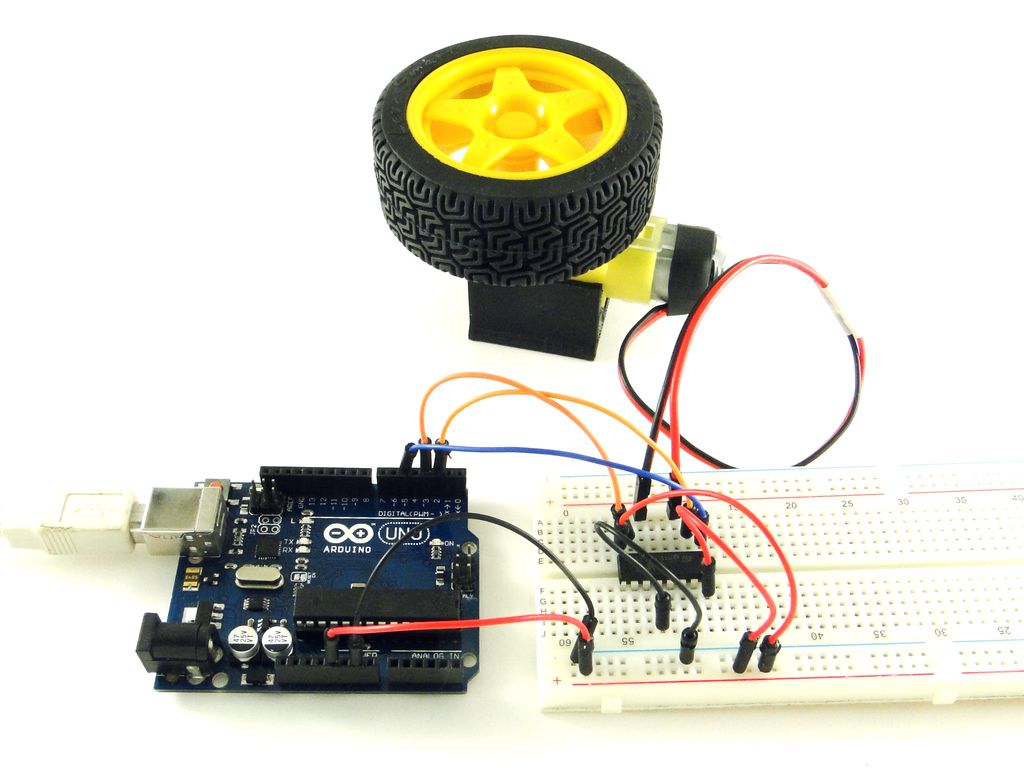
Каждый начинающий робототехник сталкивается с проблемой подключения двигателя к микроконтроллеру. Пройдя урок по управлению светодиодом кажется, что с двигателем можно поступить точно также: подключить его к цифровым выводам Ардуино, а затем включать и выключать по программе. Но не тут-то было. Даже небольшой двигатель, часто используемый в разного рода игрушках, для своей работы требует ток силой от 200 мА до 1 Ампера. А цифровой выход Arduino может дать нам только 20мА. Большинству мощных двигателей требуется напряжение более 5 Вольт, привычных для Ардуино. Распространены двигатели на 12, на 24 и на 48 Вольт. Другими словами, Ардуино очень слаба для прямого управления двигателями. Нужен какой-то мощный посредник!
Биполярный транзистор
Самый простой посредник — это транзистор. Подойдут и полевые транзисторы, и биполярные, работающие в режиме ключа. Ниже представлена схема управления двигателем при помощи биполярного NPN транзистора.
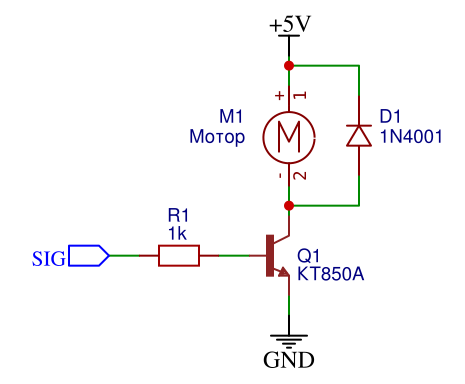
Как видим, схема очень простая. Подаем на базу транзистора слабый сигнал от Arduino через резистор 1кОм, вследствие чего транзистор открывает мощный канал, по которому ток проходит от плюса к минусу, через двигатель. По сути, мы получили примитивный драйвер двигателя!
В цепи обязательно нужно поставить защитный диод, например 1N4001 или 1N4007. Этот диод не даст сгореть транзистору и контроллеру в момент остановки двигателя, когда ЭДС самоиндукции создаст на обмотках скачок напряжения.
В этой схеме можно использовать NPN транзистор КТ850А с током коллектор-эмиттер 2 Ампера. Мотор F130, который мы используем в этом уроке, при пуске может потреблять ток до 1 А, так что транзистор должен иметь некоторый запас по току.
Полевой транзистор
Схема управления мотором через полевой транзистор выглядит схожим образом.
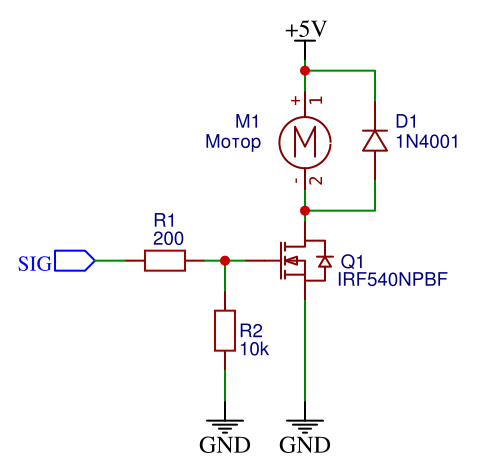
Вывод SIG можно подключить напрямую к любому цифровому выводу Ардуино. Использованный в этой схеме IRF540 имеет внушительный запас по току на канале сток-исток — 30 Ампер. Это значит, что по такой схеме можно управлять куда более мощными моторами.
С помощью одного транзистора мы можем включать и выключать двигатель постоянного тока в одном направлении. Но колесный робот должен передвигаться и в одну сторону, и в другую. Что делать? Нужен более продвинутый драйвер.
Вконтакте
Электродвигатель постоянного тока — устройство, принцип работы, управление двигателем и его пуск

Исторически первый электродвигатель работал именно на постоянном токе, так как во времена его изобретения в 1834 году Борисом Якоби единственным источником тока были гальванические батареи.
Принцип работы электродвигателя постоянного тока прост: в простейшем случае он имеет по одной паре полюсов на статоре и роторе, при этом направление тока в обмотке ротора дважды за оборот изменяется при помощи специального устройства – коллектора, представляющего собой набор пластин, соответствующий числу роторных обмоток.
При вращении ротора различные участки обмотки последовательно соединяются через щетки с внешним источником постоянного тока.
Так как электродвигатель с двухполюсным ротором имеет две мертвые точки, где запуск без внешнего импульса невозможен (полюса ротора находятся точно напротив полюсов статора, и равнодействующая сил отталкивания равна нулю), на практике используются только многополюсные роторы.
Кроме того, увеличение числа полюсов увеличивает равномерность вращения ротора.
Подключение обмотки якоря может быть различным:
- Независимое.
- Обмотка ротора не имеет прямого соединения со статором, такое подключение используется в схемах с регулировкой оборотов.
- Сериесное.
- Обмотка якоря включена последовательно со статором. При увеличении нагрузки на сериесный электродвигатель его обороты резко падают (но возрастает крутящий момент), при уменьшении нагрузки возможен разнос. По этой причине сериесное возбуждение не используется там, где возможен холостой ход электродвигателя. Классический пример сериесного мотора – автомобильный электростартер.
- Шунтовое.
- Смешанное.
- Якорь имеет две обмотки, подключенных последовательно статору и параллельно с ним. По своим электромеханическим характеристикам компаундные электромоторы находятся между сериесными и шунтовыми – они способны поднимать крутящий момент при увеличении нагрузки и вместе с тем не склонны к разносу на холостом ходу.
Компаундное возбуждение часто используется в электроинструменте, где необходимо и ограничение максимальных оборотов, и устойчивость к росту нагрузок.
В зависимости от взаимного направления магнитных потоков обеих обмоток различают прямое и обратное компаундное включение: при обратном включении и правильном конструировании ротора возможно поддержание стабильных оборотов при изменении нагрузки, но такая схема склонна к периодическим колебаниям частоты вращения.
Магнитное поле статора является постоянным, поэтому статор может выполняться из мощных магнитов, не имея обмотки. Благодаря этому снижаются затраты меди на производство электродвигателя и уменьшается его стоимость.
Сфера применения электродвигателей постоянного тока – это в первую очередь устройства и системы с батарейным питанием: от микромоторов карманных плейеров до мощных автомобильных электростартеров, тяговые двигатели легких электромобилей и электрокаров, аккумуляторный электроинструмент.
При всех своих достоинствах (простота устройства, высокий КПД, легкость реверса) электродвигатели постоянного тока имеют ряд серьезных недостатков:
- При вращении ротора в питающей цепи возникают импульсные помехи в момент перехода ламелей коллектора мимо щеток, к которым добавляются радиопомехи из-за искрения на коллекторе.
- Сам коллектор и токопроводящие щетки неизбежно изнашиваются. Неравномерный износ ламелей коллектора и изолятора между ними может приводить к нарушению контакта щеток и коллектора, снижению мощности и обгоранию ламелей.
- В ряде случаев искрение щеток усиливается настолько, что возникает так называемое «кольцевое пламя» — сплошная область ионизированного воздуха, окружающая коллектор с разрушительными последствиями. Для противодействия этому чаще всего используется принудительная вентиляция области коллектора, выносящая ионизированный воздух наружу.
УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Наиболее очевидный способ управления оборотами электродвигателя постоянного тока – это изменение тока в его обмотках и, следовательно, магнитного потока. Изначально в цепь питания ротора включался мощный реостат, однако этот способ управления имел явные недостатки:
Сложность автоматического поддержания оборотов.
Движок реостата приводился либо вручную, либо присоединялся к центробежному регулятору. В любом случае резкое увеличение нагрузки не могло быть быстро скомпенсировано.
Высокие потери мощности.
На мощных электродвигателях реостат значительно нагревался, снижая КПД двигательной установки и требуя введения дополнительного охлаждения.
Применение линейного стабилизатора для управления электродвигателем – это, по сути, замена механического реостата электронным: изменяя мощность, рассеиваемую линейным стабилизатором, изменяют ток в обмотках электродвигателя.
Главное преимущество такой схемы – возможность создания устройств для поддержания оборотов с высокой скоростью реакции. Как известно, при вращении коллектора возникают броски тока в момент подключения очередной секции обмотки ротора.
Частота этих импульсов строго пропорциональна оборотам двигателя, что широко используется в устройствах правления коллекторными двигателями. Например, автомобильный доводчик стеклоподъемников автоматически отключает питание мотора, перестав фиксировать пульсацию тока в цепи питания стеклоподъемника (обнаружение момента остановки электродвигателя).
Совершенствование силовой электроники и в частности создание ключей с низким собственным падением напряжения в открытом состоянии (IGBT, MOSFET) позволило создать системы электронного управления широтно-импульсной модуляцией. Суть широтно-импульсной модуляции (сокращенно ШИМ) состоит в изменении длительности импульсов тока при сохранении их постоянной частоты.
Такой метод регулировки имеет значительно больший КПД, так как отсутствует элемент, на котором рассеивается излишняя мощность, как это было бы в случае использования реостата или линейного стабилизатора напряжения.
Основной проблемой схем с широтно-импульсной является индуктивность обмоток электродвигателя. Она делает невозможным моментальное нарастание и падение тока, искажая форму прямоугольного сигнала, подаваемого на электродвигатель. В свою очередь, при неправильном проектировании силового каскада ШИМ-контроллера это способно привести к перегреву силовых ключей и резкому падению КПД.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
В момент включения электродвигателя постоянного тока в питающую сеть возникает значительный бросок тока, так как пусковой ток электродвигателя в несколько раз (при мощностях, измеряемых киловаттами – до 20) превосходит номинальный. По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
Осциллограмма тока якоря при этом становится близкой к пилообразной, а амплитуда пульсаций зависит от числа ступеней пускового реостата.
В тех случаях, когда нагрузка на электродвигатель находится в определенном заданном диапазоне, реостатный пуск производится в автоматическом режиме с помощью реле времени. Эта схема используется на ряде электропоездов, однако распространены и ручные контроллеры, управляемые машинистами.
Недостаток реостатного пуска – большие потери на нагрев реостатов, из-за чего они должны иметь высокую мощность и в ряде случаев искусственное охлаждение.
Этого лишен пуск изменением питающего напряжения, применяемый в тех случаях, когда возможно управление источником тока, например, в электро трансмиссиях постоянного тока: в момент пуска приводящий генератор двигатель работает на минимальных оборотах, плавно набирая их по мере разгона.
Также могут применяться управляемые выпрямители, но этот способ более применим для электродвигателей низкой мощности.
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Способы управления двигателями
Управление коллекторными электродвигателями постоянного тока
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.

- где
 — угловая частота, рад/с,
— угловая частота, рад/с, - U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
 — угловая частота, рад/с,
— угловая частота, рад/с, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — механическая жесткость двигателя.
— механическая жесткость двигателя.Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма.
Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Скалярное управление
Скалярный метод управления обеспечивает постоянное отношение амплитуды напряжений обмоток статора к частоте. Такой метод позволяет контролировать скорость вращения электродвигателя в диапазоне до 1:10. Метод прост в реализации и подходит для большинства задач управления двигателем, где не требуется высокая динамика работы. Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Векторное управление
Векторное управление позволяет управлять не только амплитудой и частотой, но и фазой управляющих напряжений. Таким образом данный метод обеспечивает максимальное быстродействие и регулирование во всем диапазоне скоростей, что невозможно выполнить с помощью скалярного управления. Недостатками данного метода является сложность реализации и более высокая цена, связанная с необходимостью использования более мощного микроконтроллера. Данный способ управления используется в таких задачах, как: робототехника, беспилотные аппараты, электрические транспортные средства, устройства автоматики и др.
Регулятор оборотов электродвигателя: как сделать
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
 Фото — мощный регулятор для асинхронного двигателя
Фото — мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото — регулятор оборотов двигателя постоянного тока
Фото — регулятор оборотов двигателя постоянного токаЗачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
 Фото — шим контроллер оборотов
Фото — шим контроллер оборотовПринцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото — схема регулятора для коллекторного двигателя
Фото — схема регулятора для коллекторного двигателяВ зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
 Фото — синусоида нормальной работы электродвигателя
Фото — синусоида нормальной работы электродвигателяКак выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
 Фото — схема регулятора для бесколлекторных двигателей
Фото — схема регулятора для бесколлекторных двигателейВ данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото — схема регулятора оборотов своими руками
Фото — схема регулятора оборотов своими рукамиВ описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Управление возбуждением двигателей постоянного тока
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
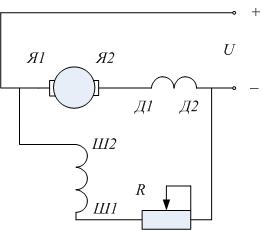 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
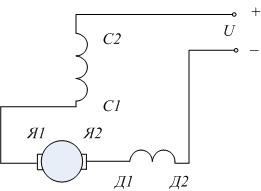 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
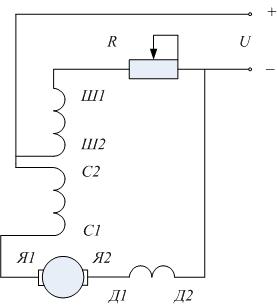 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
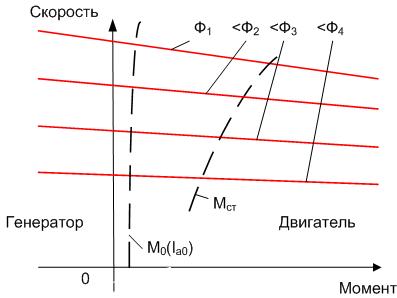
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
По всем возникшим вопросам обращайтесь пишите нам на [email protected], тел.(812) 635-9030