
Четырехквадрантная работа двигателя постоянного тока
Режим двигателя и режим торможения
Двигатель постоянного тока может работать в одном из в двух режимов – в режиме двигателя или в режиме торможения:
- В режиме двигателя происходит преобразование электрической энергию в механическую, двигатель производит крутящий момент, который необходим для осуществления вращения
- В режиме торможения наблюдается обратная ситуация — под действием внешних сил двигатель работает как генератор, преобразуя механическую энергию в электрическую. Нагрузочный момент в этом случае противодействует вращению двигателя
Двигатель может работать как в прямом, так и в реверсном направлении. Таким образом, обеспечивается работа в двигательном режиме или в режиме торможения в двух вариантах направления вращения. Двигатель постоянного тока может работать в обоих направлениях вращения и производить как движение, так и торможение.
Мощность, развиваемая двигателем, определяется произведением угловой скорости на крутящий момент. Режим движения — это такой режим работы двигателя постоянного тока, когда развиваемая им мощность имеет положительный знак. Режим торможения — это режим работы, при котором произведение вектора угловой скорости на крутящий момент имеет отрицательный знак.
Для четырехквадрантной работы двигателя правила знаков скорости и крутящего момента определяются следующим образом:
- Скорость двигателя является положительной при вращении ротора в прямом направлении
- В электромеханических системах с двигателем постоянного тока, осуществляющих поступательное движение вверх и вниз, скорость двигателя при движении вверх является положительной
- Крутящий момент является положительным, если он создает ускорение
- Момент имеет отрицательный знак, если его воздействие вызывает замедление движения
купить блоки управления бесколлекторными двигателями
купить бесколлекторные двигатели
Четырехквадрантная работа двигателя
Четырехквадрантную работу двигателя постоянного тока можно описать следующим образом:
Квадрант I
Мощность, развиваемая электродвигателем в первом квадранте, положительна. Работа осуществляется в двигательном режиме, происходит преобразование электрической энергии в механическую. Работа двигателя в первом квадранте происходит в прямом направлении.
Работа осуществляется в двигательном режиме, происходит преобразование электрической энергии в механическую. Работа двигателя в первом квадранте происходит в прямом направлении.
Квадрант II
Во втором квадранте двигатель вращается в прямом направлении, то есть его скорость имеет положительный знак. Значение крутящего момента имеет отрицательный знак. Направление вращения положительное, то есть скорость положительная, а крутящий момент отрицательный. Следовательно, развиваемая двигателем мощность также имеет отрицательное значение, двигатель работает в режиме генератора, осуществляя противодействие движению. Кинетическая энергия ротора двигателя преобразуется в электрическую энергию. Поэтому работа двигателя во втором квадранте называется торможением в прямом направлении.
Квадрант III
В третьем квадранте и скорость вращения, и крутящий момент имеют отрицательные значения.
Квадрант IV
В четвертом квадранте скорость двигателя имеет отрицательное значение, в то время как развиваемый крутящий момент имеет положительный знак. Следовательно, мощность двигателя является отрицательной, что соответствует режиму торможения. Работа двигателя в четвертом квадранте называется реверсивным торможением.
9 Удивительные факты о схеме проектирования контроллера двигателя постоянного тока.
Как двигатели постоянного тока по-прежнему имеют большое значение в эту эпоху современных технологий?
В эту новейшую эпоху технологий вы можете легко увидеть, что промышленные производители повсеместно используют системы управления двигателями, особенно двигателями постоянного тока.
Например, в нынешней промышленной зоне двигатели постоянного тока присутствуют повсюду.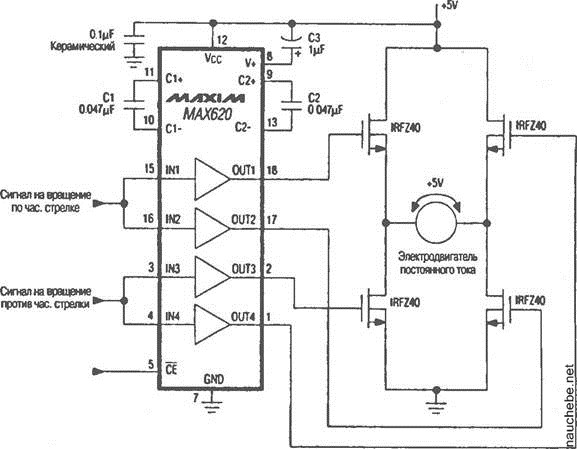
В основном, эти двигатели постоянного тока управляются контроллером двигателя постоянного тока.
Щеточный двигатель постоянного тока имеет ту же конструкцию, что и двигатель постоянного тока с коммутацией, но без механической коммутации.
Щеточные двигатели постоянного тока из-за механической системы переключения демонстрируют многочисленные проблемы, связанные с природой щеток (мягкие проводящие элементы из графита): потребление щеток, которое, помимо неисправности из-за плохого контакта, также приводит к возникновению проводящих пыль (графитовая пыль), которая ухудшает работу электроники.
Кроме того, учитывая характер контакта трущихся щеток, в воздухе возникает большое количество электрических разрядов с высоким риском взрыва и пожара в средах с легковоспламеняющимися компонентами (газ, пластик, упаковка и т. Д.).
Кроме того, электрические разряды представляют собой источник значительного электромагнитного излучения, которое мешает работе управляющей электроники.
Система механического контакта щеток также приводит к потере мощности и, следовательно, эффективности бесщеточного двигателя постоянного тока.
Бесщеточные двигатели постоянного тока были изобретены для решения прикладных задач щеточных двигателей постоянного тока, которые первоначально столкнулись с проблемой щеточных двигателей переменного тока.
Поскольку механическая система переключения служит для переключения направления потока тока в обмотках ротора, идея, которая привела к созданию бесщеточных двигателей постоянного тока, заключалась в том, чтобы электронным образом производить коммутацию вне двигателя, а затем применять ее фиксированным образом к двигатель, чтобы управлять направлением кручения так же, как механический коммутатор.
Электронное переключение управляющего тока двигателя может осуществляться с помощью электронных схем.
Электронное решение для управления электродвигателем, которое привело к созданию бесщеточных двигателей постоянного тока, стало жизнеспособной реальностью с появлением интегрированной электроники, которая позволила снизить затраты и размеры управляющей электроники и сделало производство и использование бесщеточных двигателей постоянного тока.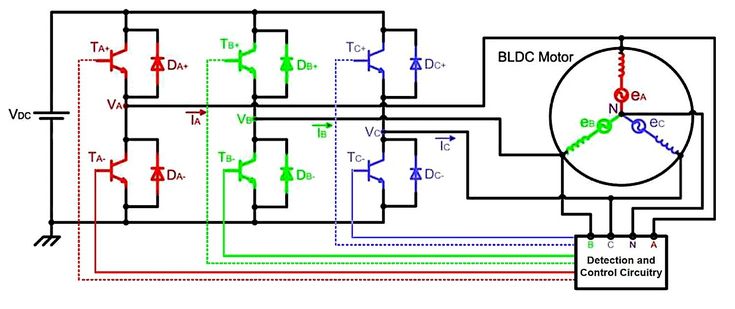
Контроллер двигателя постоянного тока
Линейный электродвигатель
Электродвигатель обычно имеет круговое вращение, поэтому для создания линейного движения ему требуются механические органы для преобразования кругового движения в линейное движение.
Альтернативой роторным двигателям являются линейные асинхронные двигатели.
Линейный двигатель — это электродвигатель, который в отличие от роторных двигателей, вместо того, чтобы производить кручение, создает линейную силу в направлении своей длины.
Интегральные схемы для управления двигателемЭлектронные переключатели, мощный инновационный компонент, основанный на высокой частоте переключения до ультразвуковых частот.
БТИЗ третьего поколения представляют собой основные функциональные возможности устройств управления мощностью, которые хорошо подходят для решения сложных задач управления двигателями.
Карбид кремния: гибридное решениеУстройства на основе карбида кремния (SiC) относятся к категории полупроводников с широкой запрещенной зоной, которые обладают особенно привлекательными характеристиками для категории высокомощных полупроводников.
Использование устройств SiC в приложениях для управления двигателями и управления мощностью представляет собой настоящий момент инноваций благодаря таким функциям, как энергосбережение, уменьшение размеров, интеграция и надежность, всем вопросам, которым особенно подвержены такие секторы, как автомобилестроение и управление в промышленной автоматизации. чувствительный.
Эти устройства сочетают в себе быстрые технологии на основе кремния и SiC-диодов, получая технологическое решение гибридного характера.
Infineon произвела большое количество таких интегрированных устройств питания как часть семейства компонентов под названием CoolSiC.
Увеличение частоты коммутации приводит к важным преимуществам в конструкции двигателей по отношению к магнитной составляющей.
Согласно исследованию, проведенному Infineon, благодаря уменьшению объема и веса стоимость системы снижается до 20%.
Кроме того, вы можете легко увидеть применение двигателей постоянного тока в двигателях малых и средних предприятий.
Среди нескольких других двигателей двигатели постоянного тока являются лучшими из-за их широкого диапазона функций. Фактически, двигатели постоянного тока — это самые старые конструкции электродвигателей.
Но они по-прежнему важны даже в эпоху современных машин.
Все это стало возможным благодаря их большой управляемости. Кроме того, это идеальное преимущество большой управляемости является основной причиной их сохранения.
Сегодня во всем мире насчитывается почти 40 миллионов двигателей постоянного тока или более, которые используются во многих различных операциях.
Более того, это факт, что большинство из нас даже не знает об основах этих двигателей.
Итак, мы здесь, чтобы объяснить основы двигателей постоянного тока, контроллера двигателя постоянного тока, основных типов двигателей постоянного тока и их приложений.
Контроллер двигателя постоянного тока
Что такое двигатель постоянного тока?
По сути, DC означает постоянный ток. Следовательно, двигатель постоянного тока — это электродвигатель.
Следовательно, двигатель постоянного тока — это электродвигатель.
Кроме того, этот мотор работает от постоянного тока. Однако это факт, что двигатели постоянного тока не будут работать без использования Платы печатных плат.
Двигатели постоянного тока — это электрические машины, которые фактически преобразуют электрическую энергию в механическую.
Фактически, двигатели постоянного тока получают электроэнергию через постоянный ток. Кроме того, эти двигатели преобразуют эту электрическую энергию в механическое вращение.
Более того, скорость и выходной крутящий момент полностью зависят от обоих,
- Конструкция мотора
- Электрический ввод.
Кроме того, изящество и элегантность двигателей постоянного тока послужили основой для производства нескольких контроллеров двигателей постоянного тока.
К тому же эти контроллеры очень просты по конструкции. Эти конструкции обеспечивают достаточную производительность по сравнению с их стоимостью.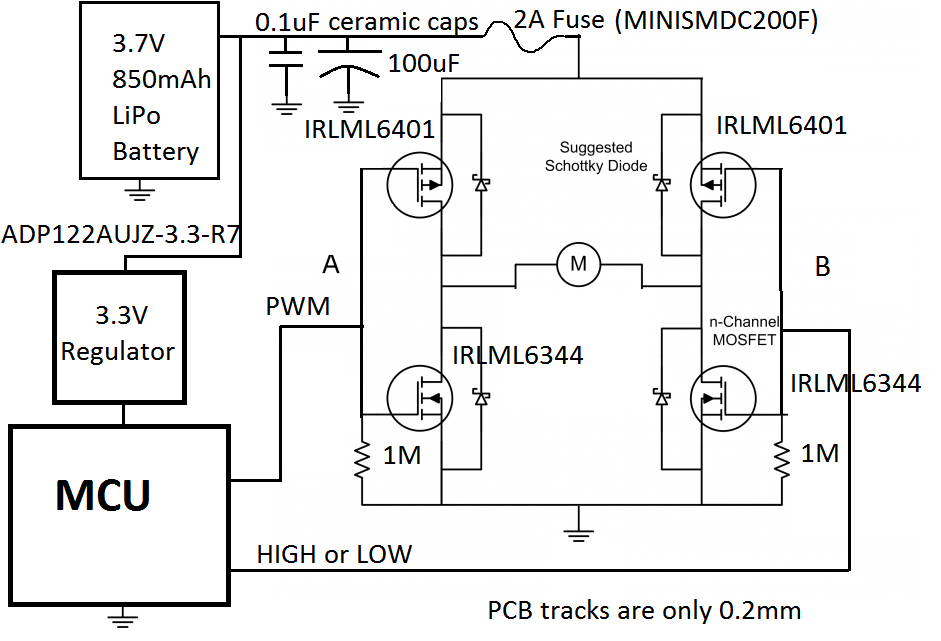
Каковы основные типы двигателей постоянного тока?
В основном существует 4 основных типа двигателей постоянного тока. А это:
- Почищенные щеткой моторы DC
- Бесщеточные двигатели постоянного тока
- Двигатели постоянного тока серии
- Шунтовые двигатели постоянного тока
Кто изобрел двигатель постоянного тока?
Как вы знаете, двигатель постоянного тока является исключительной частью нескольких электрических устройств.
Это чудесное устройство действительно произвело великую революцию в жизни людей несколькими способами.
Но когда мы говорили о его изобретении, мы обнаружили, что он был впервые изобретен в Соединенных Штатах.
По сути, Томас Давенпорт был человеком, который изобрел первый в мире электродвигатель.
Кроме того, он был первым человеком, который запатентовал функциональный электродвигатель в 1837 году.
Это факт, что Давенпорт не был первым человеком, создавшим электродвигатель.
Но на самом деле он запатентовал сверхмощные версии этих электродвигателей.
Фактически, первый в мире практический двигатель постоянного тока был изобретен Фрэнком Джулианом Спрагом в 1886 году.
Более того, это была наиболее значительная разработка, которая теперь привела к изменению различных приложений в отрасли.
Что такое
Контроллер двигателя постоянного тока?Контроллер двигателя постоянного тока — это особый вид электрического устройства. Это специальное устройство способно преобразовывать электрическую энергию в механическую.
Кроме того, двигатели постоянного тока сначала получают электроэнергию, используя постоянный ток.
Затем этот постоянный ток преобразует эту энергию в своего рода автоматическое вращение.
Сегодня промышленные производители практически повсеместно используют двигатели постоянного тока.
Эти двигатели используют магнитное поле, которое создается с помощью генерируемого тока.
Более того, эти токи обычно являются токами, способными приводить в движение ротор, закрепленный на выходном валу. Выходной крутящий момент и скорость зависят от электрической мощности и конструкции двигателя.
Выходной крутящий момент и скорость зависят от электрической мощности и конструкции двигателя.
Контроллер двигателя постоянного тока
Какие типы
Электродвигатели постоянного тока Контроллер?Здесь мы описываем наиболее распространенные методы управления двигателем постоянного тока. Фактически, все эти методы не обширны, и мы можем управлять двигателями постоянного тока несколькими другими способами. но основные 3 контроллера двигателя постоянного тока:
- Контроллер якоря: переменное сопротивление
- Регулятор скорости: широтно-импульсная модуляция (ШИМ)
- Контроллер направления: H-мост.
Контроллер двигателя постоянного тока Работа?
Контроллеры двигателей постоянного тока различаются по мощности и размерам. Вы можете легко увидеть, как используются важные механизмы, чтобы тянуть,
- Лифты и подъемники
- Силовые автомобили
- В маленьких игрушках
- Промышленные вентиляторы
- Насосы и воздуходувки
- Бытовая техника
- Драйвера для дисков и так далее.


Поговорим, как это работает.
Когда мы говорим о его работе, мы видим, что двигатель постоянного тока состоит из двух наиболее важных и важных частей. Это:
- Статор
- Арматура
Фактически статор — это постоянная часть или компонент двигателя. С другой стороны, якорь — это вращающаяся часть контроллера двигателя постоянного тока.
Когда двигатель постоянного тока работает, статор создает особое вращающееся магнитное поле, которое управляет вращением якоря.
Таким образом, все эти основные принципы работы обычно позволяют контроллерам двигателей постоянного тока изменять электрическую энергию с постоянного тока на механическую.
Эта механическая энергия может использоваться для силового оборудования. И все это возможно благодаря вращающемуся движению.
Каковы применения
Контроллер двигателя постоянного тока?Контроллеры двигателей постоянного тока бывают разных типов, так как существует несколько форм и типов двигателей постоянного тока.
Одно из самых сильных преимуществ этих контроллеров — их вариативность.
Более того, поскольку двигатели постоянного тока бывают разных форм, их контроллеры и их применения также бесчисленны.
Кроме того, поля
- Производство
- Робототехника
- Автомобили
- Военное применение и так далее.
Во всех этих областях используется контроллер двигателя постоянного тока в соответствии с потребностями двигателей постоянного тока. Т
Эти контроллеры двигателей обладают способностью обеспечивать идеальное и хорошее управление. Кроме того, их цены также действительно приемлемы.
Тест контроллера двигателя постоянного тока
Кроме того, ниже приведены лишь некоторые конкретные области применения этих контроллеров двигателей:
В поклонниках потребителей:
Они являются идеальным выбором для вентиляторов из-за их энергоэффективного механизма.
Для насосов:
Промышленные производители быстро используют двигатели постоянного тока для приведения в действие насосов.![]()
Из-за их отличной реакции во время движения и легкого регулирования скорости необходимы.
Для последних электрических велосипедов:
Сегодня у электровелосипедов есть двигатели постоянного тока. Итак, контроллеры двигателей постоянного тока специально установлены в ступицах переднего и заднего колеса, чтобы генерировать требуемый крутящий момент и уровни мощности.
Для современных электромобилей:
Двигатели постоянного тока лучше всего подходят для электромобилей. Более того, производители отдают предпочтение им из-за их энергоэффективности и долговечности.
Для детских игрушек
Идеально подходят игрушки, в которых используется двигатель постоянного тока, с огромным разнообразием напряжений.
Поскольку эти игрушки требуют разной скорости и движения, а двигатели постоянного тока способны удовлетворить все их требования.
Почему вы должны выбрать двигатель постоянного тока и
Контроллер двигателя постоянного тока?В некоторых случаях у вас есть выбор между двигателями переменного и постоянного тока.
Но это факт, что двигатели постоянного тока и контроллер двигателя постоянного тока являются первым выбором.
По сути, двигатели постоянного тока имеют несколько преимуществ по сравнению с двигателями переменного тока.
Двигатели постоянного тока и их контроллеры — прекрасный выбор из-за их разнообразия.
Двигатели и контроллеры постоянного тока также являются идеальным и идеальным выбором, когда им требуется больше энергии от источников постоянного тока низкого напряжения. Например, аккумулятор или солнечные батареи.
Но в условиях, когда вы хотите изменить направление наиболее быстро, в таких условиях двигатели постоянного тока идеально подходят для этих приложений.
Вывод:
Следовательно, в этой статье мы попытались объяснить основы двигателей постоянного тока и их очень полезного контроллера двигателя постоянного тока.
Кроме того, двигатели постоянного тока очень полезны для управления чрезвычайно высокими скоростями. Эти двигатели постоянного тока также обладают способностью обеспечивать высокий пусковой момент.
Эти двигатели также обладают способностью обеспечивать высокую точность, которая требуется в чрезвычайно широком диапазоне промышленных применений.
Кроме того, в этих контроллерах двигателей отсутствуют все проблемы и проблемы, связанные с гармониками.
Двигатели и контроллеры постоянного тока могут работать даже на очень высоких скоростях.
И они имеют высокоэффективную конструкцию с идеальным пусковым моментом.
Регуляторы постоянного тока — Bodine Electric
Перейти к основному содержаниюИмя * Адрес электронной почты * Компания Почтовый индекс *
Товар Предмет * Сообщение *
Главная > Продукция > Блоки управления постоянного тока
Регуляторы скорости Bodine PMDC преобразуют сетевую мощность переменного тока в необходимый выходной постоянный ток, необходимый для привода двигателей постоянного тока и мотор-редукторов. Мы предлагаем фильтрованные и нефильтрованные силиконовые управляемые выпрямители (SCR) и фильтрованные регуляторы скорости постоянного тока с широтно-импульсной модуляцией (ШИМ). Нефильтрованные регуляторы SCR FPM типа Bodine — это простой и экономичный выбор для регулирования скорости. Они работают от сети 115 В переменного тока и доступны как в виде шасси, так и в закрытом исполнении. Доступны модели SCR без фильтра UPM, которые принимают входное напряжение 115/230 В переменного тока (50/60 Гц), а также 115 В переменного тока (50/60 Гц). Контроллеры типа WPM имеют схему ШИМ, которая обеспечивает более плавный выходной постоянный ток. Модели с низким напряжением (12 В или 24 В постоянного тока) работают от источника постоянного тока или аккумулятора.
Мы предлагаем фильтрованные и нефильтрованные силиконовые управляемые выпрямители (SCR) и фильтрованные регуляторы скорости постоянного тока с широтно-импульсной модуляцией (ШИМ). Нефильтрованные регуляторы SCR FPM типа Bodine — это простой и экономичный выбор для регулирования скорости. Они работают от сети 115 В переменного тока и доступны как в виде шасси, так и в закрытом исполнении. Доступны модели SCR без фильтра UPM, которые принимают входное напряжение 115/230 В переменного тока (50/60 Гц), а также 115 В переменного тока (50/60 Гц). Контроллеры типа WPM имеют схему ШИМ, которая обеспечивает более плавный выходной постоянный ток. Модели с низким напряжением (12 В или 24 В постоянного тока) работают от источника постоянного тока или аккумулятора.
Регуляторы скорости Bodine PMDC имеют право на расширенную 2-летнюю системную гарантию при покупке вместе с соответствующим мотор-редуктором или двигателем PMDC.
- Шасси, закрытые Доступны модели NEMA-1 / IP-40 AC и NEMA-4X / IP65
- UPM Controls управляет мотор-редукторами и двигателями постоянного тока 90 В или 180 «SCR»
Поиск по спецификации (поиск параметра)
Крутящий момент: Select0 — 1010 — 2525 — 5050 — 100100 — 250250 — 500500+
Единицы измерения крутящего момента
фунт-дюйм
унция в
Нм
Скорость: Select0 — 2525 — 5050 — 100100 — 250250 — 500500 — 10001000+
Единицы измерения скорости
об/мин
Power:Select0 — 1/501/50 — 1/201/20 — 1/101/10 — 1/51/5 — 2/52/5 — 11+
Блоки питания
HP
Вт
Поиск по спецификации (поиск параметра)
Фильтровать по:
Продукты переменного тока
Продукты постоянного тока
продукты БКЭП
Управление движением
Вольтаж:
Спина
Нефильтрованный регулятор скорости двигателя SCR NEMA-4
Мощность (при 90 В): до 1/5 л.
Мощность (при 180 В): до 1/3 л.с.
Напряжение (вход): 115 или 230 В переменного тока
Напряжение (выход): 0–90 или 0–180 В переменного тока
Ампер (выход): от до 4,2
Руководство по электроприводам и управлению двигателями постоянного тока
Электропривод — электромеханическая система, в которой вместо дизеля, паровой или газовой турбины, гидравлики и т.п. в качестве первичного двигателя используется электродвигатель для управления движением и процессами различных машин и механизмов. 1 Типичными областями применения электроприводов являются вентиляторы, вентиляторы, компрессорные насосы, подъемники, краны, конвейеры, экскаваторы, эскалаторы, электровозы и автомобили.
Электропривод имеет ряд преимуществ 3 по сравнению с другими типами приводных систем, например:
- Характеристики управления могут быть адаптированы к требованиям применения.
- Простые и легкие методы контроля скорости.
- Электрическое торможение может быть легко применено.
- Без загрязнения окружающей среды.
- Широкий диапазон значений скорости, мощности, крутящего момента.
- Эффективность выше.
- Кратковременная перегрузочная способность.
- Функционируют в различных рабочих средах, таких как взрывоопасные, радиоактивные и погруженные в воду.
- Самозапуск – нет необходимости во внешнем пусковом оборудовании.
- По сравнению с гидравлическими и дизельными первичными двигателями, его работа более чистая, менее шумная и требует меньше обслуживания.
Типичная система электропривода включает в себя контроллер, трансмиссию, электродвигатель и приводную нагрузку (например, вентиляторы, насосы, конвейеры и т. д., упомянутые ранее). Ключевое различие между различными типами систем электропривода заключается в типе контроллера : (A) отдельное управление двигателем постоянного тока 4 компоненты, такие как пускатели двигателей, выключатели и органы управления, или (B) электронные контроллеры двигателей, называемые средствами управления приводом, которые используют полупроводники с электронными схемами и программным обеспечением для выполнения тех же функций, что и отдельные компоненты управления двигателями постоянного тока.
Типы управления двигателем постоянного тока
Существует три основных типа управления двигателем постоянного тока: ручное, полуавтоматическое и автоматическое. Ручное управление напрямую подключает двигатель постоянного тока к входной линии питания или сети. Требуется вмешательство оператора. 5 Полуавтоматическое управление использует переключатели или датчики (например, предел, давление, температура, уровень поплавка, расход, приближение, синхронизация и фоточувствительные переключатели) 6 для управления магнитным контактором или пускателем, который при включении или закрыт, подключит двигатель к входной линии питания. 7 В полуавтоматическом режиме для запуска или остановки двигателя требуется оператор, а остальные операции контролируются датчиками или переключателями. Автоматическое управление похоже на полуавтоматическое управление с одним важным отличием: вмешательство оператора не требуется. Например, термостат в системе кондиционирования воздуха или холодильнике будет включать или выключать двигатель компрессора для автоматического поддержания заданной температуры.
Функции управления двигателем постоянного тока
Независимо от того, управляется ли двигатель постоянного тока вручную, полуавтоматически или автоматически, система управления будет выполнять ряд общих функций 8 , в том числе:
- Пуск
- Остановка
- Толчковый/шаговый режим
- Заглушка
- Регулятор скорости
- Реверс
- Торможение
- Защита
Пуск
Существует несколько типов пусковых функций. Пуск через линию — самый простой метод запуска. Двигатель подключается непосредственно к линии электропередач через переключатель операторского управления. Замыкание переключателя подключает двигатель к линии. Однако для некоторых типов двигателей постоянного тока подача полного напряжения во время пуска может привести к огромный пусковой ток, который может превышать мощность источника питания, а также может привести к повреждению двигателя. В этих случаях для ограничения пускового тока используется пусковое сопротивление. 9 Это достигается путем временного включения пускового резистора последовательно с обмоткой якоря двигателя. Резистор снижает часть сетевого напряжения, чтобы ограничить пусковой ток. Двигатель будет постепенно ускоряться; это обычно называется плавный пуск . Когда двигатель достигает полной скорости, пусковой резистор снимается.
9 Это достигается путем временного включения пускового резистора последовательно с обмоткой якоря двигателя. Резистор снижает часть сетевого напряжения, чтобы ограничить пусковой ток. Двигатель будет постепенно ускоряться; это обычно называется плавный пуск . Когда двигатель достигает полной скорости, пусковой резистор снимается.
Остановка
Существует три формы остановки: выбег, торможение или замедление. Когда питание отключается от двигателя, он начинает останавливаться по инерции и зависит от времени инерции и нагрузки. Выбег нецелесообразен в некоторых приложениях, потому что двигателю потребуется слишком много времени для остановки. В этих случаях можно использовать тормоз для быстрой остановки двигателя. Существует четыре типа тормозов: механические, магнитная муфта/вихретоковые, динамические и рекуперативные тормоза. Динамическое торможение осуществляется путем рассеяния кинетической энергии якоря на тормозном резисторе. Во время остановки, пока якорь вращается, он действует как генератор. Резистор динамического торможения становится нагрузкой этого генератора, таким образом, происходит передача энергии от якоря (действующего как генератор) в резистор, который рассеивает энергию в виде тепла, вызывая торможение двигателя. 10
Резистор динамического торможения становится нагрузкой этого генератора, таким образом, происходит передача энергии от якоря (действующего как генератор) в резистор, который рассеивает энергию в виде тепла, вызывая торможение двигателя. 10
Толчковый/толчковый режим
Толчковый/толчковый режим перемещает двигатель на очень короткие расстояния для позиционирования или выравнивания. В толчковом режиме для перемещения двигателя используется пониженное напряжение, в то время как в толчковом режиме используется полное напряжение. 11
Заглушка
Заглушка выполняет двойную функцию: останавливает или реверсирует двигатель. Это достигается изменением полярности питания якоря при работающем двигателе. В результате создается противодействующий момент, и двигатель быстро замедляется. Когда двигатель достигает нулевой скорости и начинает обратное вращение, питание двигателя отключается путем замыкания заглушки нулевой скорости. 12
Реверс
Реверс регулирует направление вращения двигателя (по часовой или против часовой стрелки).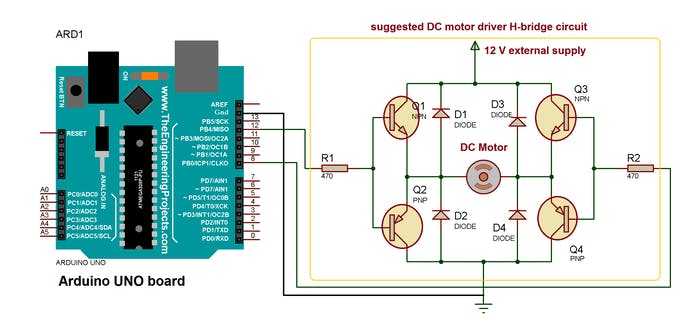 Это осуществляется с помощью переключателя управления или с помощью электронного контроллера привода и влечет за собой изменение полярности соединений якоря, что можно сделать с помощью кнопочного управления механически блокируемыми кнопками прямого и обратного хода или программированием электронного контроллера привода для работы в обратном направлении 13
Это осуществляется с помощью переключателя управления или с помощью электронного контроллера привода и влечет за собой изменение полярности соединений якоря, что можно сделать с помощью кнопочного управления механически блокируемыми кнопками прямого и обратного хода или программированием электронного контроллера привода для работы в обратном направлении 13
Регулятор скорости
Скорость двигателя постоянного тока можно изменять во всем непрерывном диапазоне скоростей путем изменения тока якоря с помощью резистора или электронного контроллера привода. 14
Защита
Защитные цепи защищают двигатель с помощью 15 , предохранителей, автоматических выключателей, реле перегрузки, защиты открытого поля, защиты от превышения скорости, датчиков тока и металлооксидных варисторов (MOV) для защиты от перенапряжений. 16
Знакомство с электронными приводами постоянного тока
Электронный привод постоянного тока, иногда называемый полупроводниковым приводом, является частью всех различных систем электропривода, используемых для управления движением и изменения скорости двигателя постоянного тока.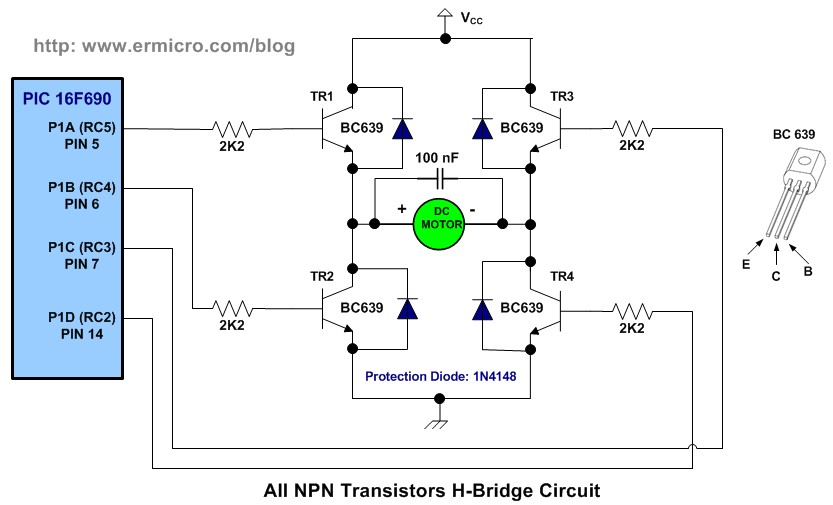 Ранние типы электроприводов, такие как система Уорда-Леонарда, управляли двигателями косвенно. Система Уорда-Леонарда представляет собой генератор переменного тока двигатель постоянного тока, который подает переменное напряжение на якорь двигателя постоянного тока с параллельной обмоткой для изменения скорости двигателя. 17 Несмотря на то, что система Ward-Leonard обеспечивает хорошее регулирование скорости и крутящего момента в диапазоне скоростей 25:1, от нее отказались из-за чрезмерных затрат на покупку трех отдельных вращающихся машин, а также значительного обслуживания, необходимого для поддержания щеток в рабочем состоянии. и коммутаторы двух машин постоянного тока в нормальных условиях эксплуатации. 18 (Аналогичная судьба постигла и вихретоковую муфту. 19 )
Ранние типы электроприводов, такие как система Уорда-Леонарда, управляли двигателями косвенно. Система Уорда-Леонарда представляет собой генератор переменного тока двигатель постоянного тока, который подает переменное напряжение на якорь двигателя постоянного тока с параллельной обмоткой для изменения скорости двигателя. 17 Несмотря на то, что система Ward-Leonard обеспечивает хорошее регулирование скорости и крутящего момента в диапазоне скоростей 25:1, от нее отказались из-за чрезмерных затрат на покупку трех отдельных вращающихся машин, а также значительного обслуживания, необходимого для поддержания щеток в рабочем состоянии. и коммутаторы двух машин постоянного тока в нормальных условиях эксплуатации. 18 (Аналогичная судьба постигла и вихретоковую муфту. 19 )
Современные электронные приводы постоянного тока имеют многочисленные преимущества по сравнению с прежними системами электропривода, такими как привод Уорда-Леонарда. 20 К ним относятся:
- Большой диапазон мощности.
- Способен развивать полный крутящий момент в состоянии покоя без сцепления.
- Очень большой диапазон скоростей без коробки передач.
- Чистая операция.
- Безопасная эксплуатация в опасных условиях.
- Немедленное использование (без времени прогрева)
- Низкие потери холостого хода.
- Низкий акустический шум.
- Отличная управляемость.
- Работа в четырех квадрантах: движение вперед, торможение вперед, движение назад и торможение задним ходом.

Хотя у электронных приводов постоянного тока множество преимуществ, у них есть некоторые недостатки, 21 , такие как:
- Очень сложный и требующий для обслуживания высококвалифицированный технический персонал.
- Ввод гармоник/электрических помех в линию электропередачи 22
Электронные приводы постоянного тока: методология управления и характеристики
Электронный привод постоянного тока представляет собой электронный тиристорный преобразователь/выпрямитель переменного тока в постоянный или преобразователь постоянного тока в постоянный, называемый прерывателем постоянного тока. Преобразователь — это сложная электронная система управления, которая может точно управлять вращением, крутящим моментом и скоростными характеристиками двигателя постоянного тока. Преобразователи переменного тока в постоянный бывают нескольких конфигураций: (A) двухполупериодный, 12-импульсный мост, (B) двухполупериодный, 6-импульсный мост или (C) полуволновой, 3-импульсный мост. 23 Наиболее распространенной конфигурацией является двухполупериодный 6-импульсный мост, поскольку он создает меньше искажений на стороне постоянного тока преобразователя и имеет меньшие потери в двигателе постоянного тока, чем 3-импульсный мост. (12-импульсные мосты обычно используются в более крупных приводах для уменьшения гармоник в линии электропередачи переменного тока.) КПД преобразователя обычно превышает 98 %, а общий КПД привода постоянного тока и двигателя постоянного тока составляет около 90 %. Кроме того, преобразователи переменного тока в постоянный могут быть построены для приложений мощностью до нескольких мегаватт с хорошими характеристиками управления и производительности.
Преобразователь — это сложная электронная система управления, которая может точно управлять вращением, крутящим моментом и скоростными характеристиками двигателя постоянного тока. Преобразователи переменного тока в постоянный бывают нескольких конфигураций: (A) двухполупериодный, 12-импульсный мост, (B) двухполупериодный, 6-импульсный мост или (C) полуволновой, 3-импульсный мост. 23 Наиболее распространенной конфигурацией является двухполупериодный 6-импульсный мост, поскольку он создает меньше искажений на стороне постоянного тока преобразователя и имеет меньшие потери в двигателе постоянного тока, чем 3-импульсный мост. (12-импульсные мосты обычно используются в более крупных приводах для уменьшения гармоник в линии электропередачи переменного тока.) КПД преобразователя обычно превышает 98 %, а общий КПД привода постоянного тока и двигателя постоянного тока составляет около 90 %. Кроме того, преобразователи переменного тока в постоянный могут быть построены для приложений мощностью до нескольких мегаватт с хорошими характеристиками управления и производительности. 24
24
Другим типом контроллера привода постоянного тока является преобразователь постоянного тока в постоянный или прерыватель постоянного тока. В то время как преобразователь переменного тока в постоянный питается от источника переменного тока, прерыватель постоянного тока питается от источника постоянного тока. Оба электронных элемента управления производят переменное напряжение постоянного тока, которое при подаче на якорь двигателя постоянного тока изменяет ток якоря и, следовательно, скорость двигателя. Преобразователь переменного/постоянного тока создает это переменное напряжение постоянного тока, регулируя угол включения своего мостового выпрямителя SCR, в то время как прерыватель постоянного тока изменяет напряжение, контролируя изменяющийся угол для изменения рабочего цикла. 25 Выходное напряжение прерывателя имеет форму импульсов. Отношение времени прерывателя можно контролировать для изменения среднего напряжения. Изменение напряжения на нагрузке может быть достигнуто либо ограничением тока, либо регулированием отношения времени.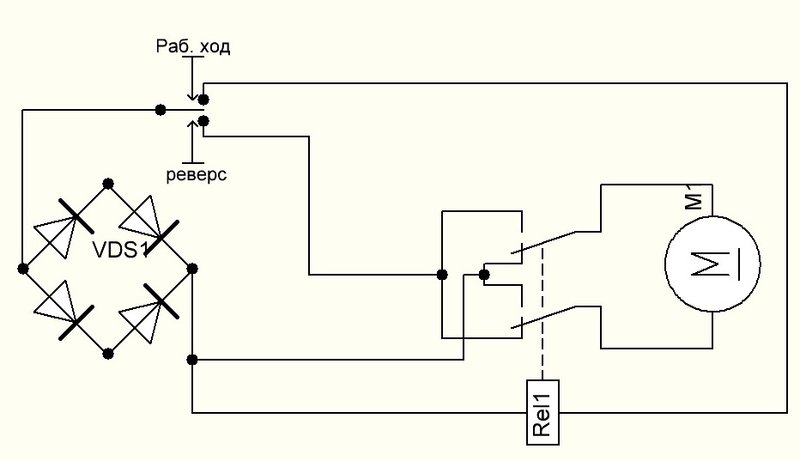 Например, при управлении ограничением тока, когда ток достигает верхнего предела, прерыватель отключается, чтобы отключить двигатель от источника питания. Ток нагрузки проходит через шунтирующий диод и затухает. Когда он падает до нижнего предела, прерыватель включается и подключается к источнику питания, таким образом поддерживается средний ток. 26
Например, при управлении ограничением тока, когда ток достигает верхнего предела, прерыватель отключается, чтобы отключить двигатель от источника питания. Ток нагрузки проходит через шунтирующий диод и затухает. Когда он падает до нижнего предела, прерыватель включается и подключается к источнику питания, таким образом поддерживается средний ток. 26
Методология управления
Основной привод постоянного тока представляет собой систему с регулируемой скоростью и замкнутым контуром. Преимущества 27 замкнутой системы:
- Более точная и надежная
- Реагирует на изменения окружающей среды
- Уменьшены эффекты нелинейности и искажения
- Предпочтительно, когда помехи и колебания непредсказуемы
Система регулирования скорости с обратной связью 28 состоит из схемы задания (уставки скорости), дифференциального усилителя (ошибки), генератора пусковых импульсов, тринисторного моста и сигнала обратной связи по скорости от тахометра или энкодера . Эталонная скорость устанавливается путем настройки усилителя эталонной ошибки (дифференциала) на напряжение, пропорциональное эталонной скорости. Сигнал ошибки (разница между заданным значением скорости и фактической частотой вращения вала) подается на генератор импульсов запуска, который генерирует импульсы запуска, которые затем устанавливают углы открытия тиристоров моста SCR. Выход моста SCR представляет собой переменное напряжение постоянного тока, которое подается на якорь двигателя постоянного тока. Скорость двигателя постоянного тока зависит и прямо пропорциональна этому переменному напряжению. Датчик скорости или тахометр определяет фактическую скорость двигателя в об/мин и преобразует ее в сигнал обратной связи, пропорциональный скорости вала. Этот сигнал замыкает контур управления скоростью. Обратная связь сравнивается с эталонной уставкой и до бесконечности подается на дифференциальный усилитель ошибки. Скорость двигателя будет оставаться постоянной до тех пор, пока не изменится заданное значение скорости.
Эталонная скорость устанавливается путем настройки усилителя эталонной ошибки (дифференциала) на напряжение, пропорциональное эталонной скорости. Сигнал ошибки (разница между заданным значением скорости и фактической частотой вращения вала) подается на генератор импульсов запуска, который генерирует импульсы запуска, которые затем устанавливают углы открытия тиристоров моста SCR. Выход моста SCR представляет собой переменное напряжение постоянного тока, которое подается на якорь двигателя постоянного тока. Скорость двигателя постоянного тока зависит и прямо пропорциональна этому переменному напряжению. Датчик скорости или тахометр определяет фактическую скорость двигателя в об/мин и преобразует ее в сигнал обратной связи, пропорциональный скорости вала. Этот сигнал замыкает контур управления скоростью. Обратная связь сравнивается с эталонной уставкой и до бесконечности подается на дифференциальный усилитель ошибки. Скорость двигателя будет оставаться постоянной до тех пор, пока не изменится заданное значение скорости. 9 30 :
9 30 :
N α V e /Flux Φ
Выходной крутящий момент, T, пропорционален произведению I якоря x Flux Φ:
T α ( я якорь ) Поток Φ
Выходная мощность, P, пропорциональна произведению крутящего момента (T) и скорости (N):
P α (T)N
Обычно скорость двигателя постоянного тока можно регулировать, изменяя напряжение якоря или поток поля (но не то и другое одновременно). Поскольку поток поля остается постоянным ниже базовой скорости, скорость двигателя можно изменять, увеличивая или уменьшая напряжение якоря. Это делается путем регулировки переменного напряжения, создаваемого на выходе привода моста SCR (выпрямитель с фазовым управлением), или среднего переменного напряжения, создаваемого этим мостом SCR, который управляет рабочим циклом прерывателя постоянного тока. При достижении максимального выходного напряжения преобразователя дополнительная скорость может быть достигнута за счет уменьшения потока поля. это называется ослабление поля . При ослаблении поля диапазон скоростей обычно ограничивается примерно 3:1, чтобы обеспечить стабильность и хорошую коммутацию двигателя. Двигатель имеет полный крутящий момент в нормальном диапазоне скоростей и даже в состоянии покоя. При ослаблении поля крутящий момент падает пропорционально скорости, но выходная мощность остается постоянной. 31
это называется ослабление поля . При ослаблении поля диапазон скоростей обычно ограничивается примерно 3:1, чтобы обеспечить стабильность и хорошую коммутацию двигателя. Двигатель имеет полный крутящий момент в нормальном диапазоне скоростей и даже в состоянии покоя. При ослаблении поля крутящий момент падает пропорционально скорости, но выходная мощность остается постоянной. 31
Факторы, влияющие на выбор привода постоянного тока
Выбор или определение размера электронного привода постоянного тока зависит от множества факторов 32 , которые включают:
- Рейтинги и капитальные затраты
- Диапазон скоростей
- Эффективность
- Регулировка скорости
- Управляемость
- Требования к торможению
- Надежность
- Коэффициент мощности
- Коэффициент мощности
- Коэффициент нагрузки и рабочий цикл
- Наличие поставки
- Влияние изменений поставки
- Загрузка подачи
- Окружающая среда
- Операционные расходы
Капитальные затраты зависят от номинала привода. Диски большего размера с большей производительностью будут стоить дороже. Для сравнения, контроллеры привода переменного тока стоят дороже, чем контроллеры привода постоянного тока, но двигатели переменного тока стоят дешевле и требуют меньше затрат на техническое обслуживание, чем щеточные двигатели постоянного тока. 33 Хотя приводы постоянного тока имеют широкий диапазон скоростей, для них могут потребоваться тиристоры с более высокими номиналами из-за более высоких токов, связанных с работой на низкой скорости. КПД – это отношение выходной мощности к входной мощности. Низкий КПД имеет два недостатка: (1) большие потери энергии и (2) чрезмерный нагрев компонентов привода и двигателя. Приводы постоянного тока обычно имеют высокий КПД; однако на низких скоростях они имеют низкий коэффициент мощности. 34 Приводы постоянного тока имеют преимущество по отношению мощности к весу по сравнению с электроприводами Ward-Leonard, но меньшее преимущество по сравнению с приводами переменного тока.
Диски большего размера с большей производительностью будут стоить дороже. Для сравнения, контроллеры привода переменного тока стоят дороже, чем контроллеры привода постоянного тока, но двигатели переменного тока стоят дешевле и требуют меньше затрат на техническое обслуживание, чем щеточные двигатели постоянного тока. 33 Хотя приводы постоянного тока имеют широкий диапазон скоростей, для них могут потребоваться тиристоры с более высокими номиналами из-за более высоких токов, связанных с работой на низкой скорости. КПД – это отношение выходной мощности к входной мощности. Низкий КПД имеет два недостатка: (1) большие потери энергии и (2) чрезмерный нагрев компонентов привода и двигателя. Приводы постоянного тока обычно имеют высокий КПД; однако на низких скоростях они имеют низкий коэффициент мощности. 34 Приводы постоянного тока имеют преимущество по отношению мощности к весу по сравнению с электроприводами Ward-Leonard, но меньшее преимущество по сравнению с приводами переменного тока. 35 Большинство промышленных нагрузок являются индуктивными и работают с отстающим коэффициентом мощности (менее единицы), как и приводы с регулируемой скоростью. Но управляемые тиристорные выпрямители или прерыватели постоянного тока дополнительно снижают коэффициент мощности привода. Конденсаторы коррекции коэффициента мощности на входе линии питания или на выходе привода могут быть добавлены для компенсации запаздывающих коэффициентов мощности. 36 Тиристорные приводы допускают ограниченные колебания напряжения и тока. Однако для источников питания с низким импедансом необходимо будет добавить входные дроссели или изолирующие трансформаторы на вход привода постоянного тока. 37 Для агрессивных или взрывоопасных сред потребуются полностью закрытые двигатели, поскольку двигатели постоянного тока чувствительны к «коррозионным и запыленным средам». 38
35 Большинство промышленных нагрузок являются индуктивными и работают с отстающим коэффициентом мощности (менее единицы), как и приводы с регулируемой скоростью. Но управляемые тиристорные выпрямители или прерыватели постоянного тока дополнительно снижают коэффициент мощности привода. Конденсаторы коррекции коэффициента мощности на входе линии питания или на выходе привода могут быть добавлены для компенсации запаздывающих коэффициентов мощности. 36 Тиристорные приводы допускают ограниченные колебания напряжения и тока. Однако для источников питания с низким импедансом необходимо будет добавить входные дроссели или изолирующие трансформаторы на вход привода постоянного тока. 37 Для агрессивных или взрывоопасных сред потребуются полностью закрытые двигатели, поскольку двигатели постоянного тока чувствительны к «коррозионным и запыленным средам». 38
- У.А.Бакши и М.В.Бакши. Электроприводы и управление. 1-е изд. Технические публикации Пуна, 2009 г. . Страница 1-1 ↩
- Н. К. Де и П. К. Сен. Электроприводы. Prentice Hall of India, 2006. Страница 1 ↩
- У.А.Бакши и М.В.Бакши. Электроприводы и управление. 1-е изд. Технические публикации Пуна, 2009 г. Стр. 1-1 ↩
- Герман, Стивен Л. Управление промышленным двигателем. 6-е изд. Delmar Cengage Learning, 2010. Страница 1 ↩
- Герман, Стивен Л. Управление промышленным двигателем. 6-е изд. Delmar Cengage Learning, 2010. Страница 1 ↩
- Герман, Стивен Л. Управление электродвигателем. 9изд. Delmar Cengage Learning, 2010. Страница 20 ↩
- Герман, Стивен Л. Управление промышленным двигателем. 6-е изд. Delmar Cengage Learning, 2010. Страница 1 ↩
- Герман, Стивен Л. Управление промышленным двигателем. 6-е изд. Delmar Cengage Learning, 2010. Страница 7 ↩
- Герман, Стивен Л. Управление электродвигателем. 9-е изд. Delmar Cengage Learning, 2010. Страница 7 ↩
- Джеффри Дж. Келджик. Электричество Четыре: двигатели переменного / постоянного тока, средства управления и техническое обслуживание. 9-е изд. Delmar Cengage Learning, 2009. Страница 85 ↩
- Герман, Стивен Л. Управление электродвигателем. 9-е изд. Delmar Cengage Learning, 2010. Страница 7 ↩
- С.К. Бхаттачарья, Бриджиндер Сингх, С.К. Бхаттачарья. Управление машинами. Издательство New Age Unternational Ltd 2006. Страница 146 ↩ .
- Джеффри Дж. Келджик. Электричество Четыре: двигатели переменного / постоянного тока, средства управления и техническое обслуживание. 9-е изд. Delmar Cengage Learning, 2009. Страница 83 ↩
- Герман, Стивен Л. Управление электродвигателем. 9-е изд. Delmar Cengage Learning, 2010. Страница 11 ↩
- Герман, Стивен Л. Управление электродвигателем. 9-е изд. Delmar Cengage Learning, 2010. Страница 7 ↩
- Герман, Стивен Л. Управление электродвигателем. 9-е изд. Delmar Cengage Learning, 2010. Страница 12 ↩
- Малкольм Барнс. Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Страница 21 ↩
- Малкольм Барнс. Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Страница 21 ↩
- Г. К. Дубей. Основы электропривода. 2-е изд. Alpha Science International, 2001 Страница 356 ↩
- Андре Вельтман, Дуко В. Дж. Пулле, Р. В. А. А. Де Донкер. Основы электропривода. Springer Science + Business Media, 2007. Страница 2 ↩ .
- Андре Вельтман, Дуко В. Дж. Пулле, Р. В. А. А. Де Донкер. Основы электропривода. Springer Science + Business Media, 2007. Страница 4 ↩ .
- Дж. Б. Диксит, Амит Ядав. Качество электроэнергии. Laximi Publications, 2010. Страница 34 ↩
- Малкольм Барнс. Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Стр. 21 ↩
- Малкольм Барнс. Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Страница 21 ↩
- Ведам Субраманьям. Тиристорное управление электроприводами. Tata McGraw-Hill, 2008. Страница 11 ↩
- Ведам Субраманьям. Электроприводы: концепции и приложения. 2-е изд. Тата Макгроу-Хилл. 2011. Страница 395 ↩
- В.С.Багад и А.П.Годзе. Мехатроника и микропроцессор. 1-е изд. Технические публикации Пуна, 2009 г. Стр. 1-18 ↩
- В.С.Багад и А.П.Годзе. Мехатроника и микропроцессор. 1-е изд. Технические публикации Пуна, 2009 г. Стр. 3-27 ↩
- В.С.Багад и А.П.Годзе. Мехатроника и микропроцессор. 1-е изд. Технические публикации Пуна, 2009 г. Стр. 3-27 ↩
- У.А.Бакши и М.В.Бакши. Электроприводы и управление. 1-е изд. Технические публикации Пуна, 2009 г. Стр. 2-9 ↩
- Малкольм Барнс. Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Стр. 21 ↩
- Уильям Шеперд, Лэнс Норман Халли, Д. Т. В. Лян. Силовая электроника и управление двигателем. 2-е изд. Издательство Кембриджского университета. 1995. Страница 129 ↩
- Уильям Шеперд, Лэнс Норман Халли, Д.
 . Страница 1-1 ↩
. Страница 1-1 ↩ 9-е изд. Delmar Cengage Learning, 2009. Страница 85 ↩
9-е изд. Delmar Cengage Learning, 2009. Страница 85 ↩ Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Страница 21 ↩
Практические приводы с регулируемой скоростью и силовая электроника. Elsevier Lincare House: IDC Technologies, 2003. Страница 21 ↩ Tata McGraw-Hill, 2008. Страница 11 ↩
Tata McGraw-Hill, 2008. Страница 11 ↩