
Ток электродвигателя, какую силу тока потребляет двигатель, мотор при пуске и работе. « ЭлектроХобби
Производители на самом корпусе электрических двигателей ставят металлическую табличку, на которой написаны основные характеристики данного электродвигателя.
На этой табличке указан и ток, который потребляет данная электрическая машина при своей номинальной работе (средне допустимой, с нормальной нагрузкой на валу двигателя). Данная надпись может иметь два значения, например 5,9/3,4А, что означает – при подключении двигателя в режиме «треугольник» номинальные ток будет равен 5,9 ампер, а при подключении в режиме «звезда» он будет 3,4 ампера. На этой же табличке можно увидеть и символы, указывающие данные режимы работы.
Если по каким-то причинам на корпусе электродвигателя нет надписи, какую номинальную силу тока он потребляет, то ток можно вычислить по следующей формуле (если конечно известны все остальные, имеющиеся в этой формуле, величины!):
При отсутствии металлической таблички с основными характеристиками на корпусе электрического двигателя можно пойти более простым путем, чтобы узнать приближенную силу тока, потребляемой движком. Если известна номинальная мощность двигателя, то применим следующее условие – «киловатт электрической мощности равен двум амперам тока» (это условие подходит для электродвигателей с мощностью от 3-х киловатт и более, то есть будет максимально приближенным). Например, у нас есть асинхронный электрический двигатель мощностью 5 кВт (5000 ватт). Следовательно, приближенное значение потребляемого тока будет около 10 ампер. Может возникнуть небольшая непонятка. Если воспользоваться простой формулой вычисления тока, зная мощность и напряжение: 5000 ватт / 380 вольт = 13,15 ампер. Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Если известна номинальная мощность двигателя, то применим следующее условие – «киловатт электрической мощности равен двум амперам тока» (это условие подходит для электродвигателей с мощностью от 3-х киловатт и более, то есть будет максимально приближенным). Например, у нас есть асинхронный электрический двигатель мощностью 5 кВт (5000 ватт). Следовательно, приближенное значение потребляемого тока будет около 10 ампер. Может возникнуть небольшая непонятка. Если воспользоваться простой формулой вычисления тока, зная мощность и напряжение: 5000 ватт / 380 вольт = 13,15 ампер. Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Практическим вариантом узнать значение силы тока, который потребляется электродвигателем при его номинальной работе, будет использование обычного амперметра, или токоизмерительных клещей.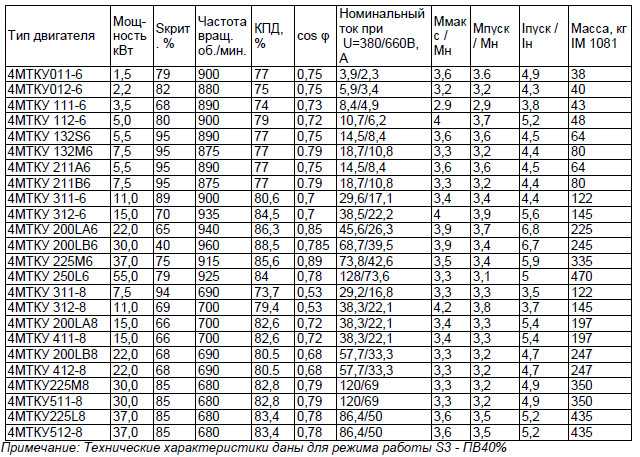 При уверенности в том, что наш электродвигатель точно рассчитан на то напряжение, что мы собираемся на него подать, мы даем питание на него. Далее, все просто, берем токоизмерительные клещи и измеряем силу тока на проводах, что питают наш электродвигатель. Причем еще стоит обратить внимание на то, что у трехфазного электродвигателя рабочие токи должны быть одинаковыми на всех трех фазах. Если Вы вдруг обнаружили факт неодинаковости, то причиной может быть, как перекос фаз электрического питания, так и неисправности самого электродвигателя, который может в скором времени вовсе выйти из строя из-за ненормального режима своей работы. В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
При уверенности в том, что наш электродвигатель точно рассчитан на то напряжение, что мы собираемся на него подать, мы даем питание на него. Далее, все просто, берем токоизмерительные клещи и измеряем силу тока на проводах, что питают наш электродвигатель. Причем еще стоит обратить внимание на то, что у трехфазного электродвигателя рабочие токи должны быть одинаковыми на всех трех фазах. Если Вы вдруг обнаружили факт неодинаковости, то причиной может быть, как перекос фаз электрического питания, так и неисправности самого электродвигателя, который может в скором времени вовсе выйти из строя из-за ненормального режима своей работы. В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
Помимо номинального тока, который потребляется электродвигателем при нормальной своей работе, существует еще так называемый пусковой ток. Его величина может быть превышать номинальный ток аж в 3-8 раз. То есть, когда мы подаем питание на электрический двигатель, который до этого находился в состоянии покоя, в начальный момент по его обмоткам начинает протекать увеличенный ток по причине нескомпенсированности сил электромагнитных полей внутри двигателя. Чем быстрее электродвигатель начинает вращаться, тем меньше тока он начинает потреблять. То есть, пусковым током считается то значение электрического тока, которое существует с момента включения электродвигателя и до выхода его на свои номинальные обороты (время разгона двигателя от нуля до нормального значения).
Чем быстрее электродвигатель начинает вращаться, тем меньше тока он начинает потреблять. То есть, пусковым током считается то значение электрического тока, которое существует с момента включения электродвигателя и до выхода его на свои номинальные обороты (время разгона двигателя от нуля до нормального значения).
Минимальный ток, что будет течь через обмотки электрического двигателя, будет тогда, когда движок работает на холостом ходу (то есть, к его валу не подсоединено ни одной механической нагрузки). Следовательно, чем сильнее мы нагрузим вал двигателя, тем большую силу тока начнет он потреблять. Номинальной нагрузкой считается та, на которую изначально данный электродвигатель был рассчитан при своем изготовлении, и при которой эта электрическая машина может работать продолжительное время без вреда для себя. Имеется также понятие о максимальной нагрузке, при которой сила тока, что потребляется двигателем, находится на предельно допустимом значении. При максимальных токах электродвигатели могут работать лишь незначительный промежуток времени, поскольку длительная работа может негативно влиять на сам движок (перегрев), сокращая его общий срок службы.
Пусковые токи у разных электродвигателей разные, их можно посмотреть в справочных таблицах, где прописаны характеристики каждого конкретного движка. Для чего нужно знать значение пусковых токов? Для того, чтобы правильно подобрать устройства защиты для электрических цепей, которые непосредственно относятся к схеме этого электрического двигателя. Например, зная конкретную величину пускового тока мы правильно можем подобрать тепловую защиту под него, автоматически выключатель, что отвечает за включение и выключение данного двигателя и т.д. Это избавит нас от таких проблем как постоянное срабатывание токовой защиты (если устройство рассчитано на меньший ток, чем нужно) или не срабатывание тогда, когда это нужно (если ток срабатывания устройства гораздо больше нужного).
Большие пусковые токи – это негативное явление, которое на короткий промежуток времени создает просадку питающей сети. В этой электросети возникает кратковременное падение напряжения. Как можно уменьшить пусковые токи электродвигателя? Первый вариант (классический), это запускать электродвигатель по схеме «звезда», а спустя некоторое время переключаться на схему «треугольник». В этом случае при включении начальный, пусковой ток будет относительно небольшой, а при переключении режима в «треугольник» движок выйдет на свои номинальные обороты.
В этом случае при включении начальный, пусковой ток будет относительно небольшой, а при переключении режима в «треугольник» движок выйдет на свои номинальные обороты.
Иными вариантами снижения пусковых токов электродвигателя являются использование различных устройств плавного пуска, которые за счет электронных схем контролируют начальный режим разгона электрической машины. Допустим при использовании преобразователей частоты можно легко задать нужные параметры для старта и последующий работы электрического двигателя.
P.S. Правильные режим работы любого электродвигателя способствует увеличению общего срока службы данного электротехнического устройства, а также щадящей работе тех электрических цепей, что относятся к питанию данного устройства (включая и саму питающую сеть).
Ток электрического двигателя, какой он должен быть и как определить силу тока электродвигателя, формулы. « ЭлектроХобби
Ток электрического двигателя, какой он должен быть и как определить силу тока электродвигателя, формулы. « ЭлектроХобби
« ЭлектроХоббиБлог Формулы и Расчеты
Возможно Вам известно, что именно электрический ток, который протекает по обмоткам электрического двигателя заставляет его ротор вращаться вокруг своей оси! Именно по причине движения потока заряженных частиц (электронов) внутри медного проводника, порождающих электромагнитные силы, создается вращающий момент (из за отталкивания магнитных полей друг от друга). Следовательно, зная ток двигателя мы можем многое сказать о самом электродвигателе (его мощность, исправность, режим работы и т.д.).
Для начала предлагаю картинку с формулами, которые позволяют вычислить силу тока из основных характеристик электрического двигателя:
Немного пояснения к формулам. Первая формула определяет номинальный ток двигателя для постоянного тока, выражаемый в амперах. Вторая же формула вычисляет номинальную силу тока для переменного вида тока, также в амперах. Наиболее значимой характеристикой для электродвигателя (пожалуй и не только для него) является его электрическая мощность.
Не менее основной характеристикой, наравне с мощностью, является напряжение электродвигателя, которое подаётся на него в виде питания, и напрямую связанную с величиной тока двигателя. Выражается оно в вольтах (В). Стандартным напряжением считается 220 и 380 вольт. В однофазной сети используются электрические двигатели с напряжением питания 220 В. Ну, а в трёхфазной сети, естественно, двигатели ставят на напряжение 380 В. Хотя на трёхфазный двигатель можно подать и 220 вольт, применяя дополнительный конденсатор, для пуска.
Как и в любых других электрических устройствах и приборах у электродвигателя есть свои потери (зависящие от материала, качества сборки, конструкции и т.
И последней характеристикой, значительно влияющей на ток двигателя, которая имеется в формуле (для переменного тока) является так называемый косинус фи. Что это такое? Вам должно быть известно, что переменный ток, протекая по катушке, имеет свойство сдвигаться не некоторый временной промежуток относительно напряжения. В свою очередь это не совсем благоприятное явление, которое отрицательно влияет на саму работу электродвигателя. Этот косинус фи в идеале должен быть равен единице. А в реальности он обычно немного меньше нее. Эта самая небольшая разница снижает общий КПД движка, увеличивая энергетические потери.
Таким образом мы с вами видим, что обычная формула нахождения тока двигателя через мощность и напряжение (ток равен электрическая мощность деленная на напряжение) приобретает более точный вид, путём введения в нее дополнительных факторов (характеристик), непосредственно влияющих на работу электродвигателя. Это коэффициент полезного действия и косинус фи (для переменного тока). Обычно все эти номинальные характеристики указываются на самом корпусе двигателя. И чтобы их узнать достаточно просто их прочитать. Но нередки случаи, когда эта самая маркировка стерлась. Тут то нам и пригодится формула.
Если нам особой точности в вычислении не нужно, то просто делим известную нам электрическую мощность на напряжение, получаем примерный номинальный ток двигателя. Если нам известно электрическое напряжение и сопротивление обмоток (которое можно измерить обычным тестером, мультиметром), то мы напряжение делим на сопротивление (выражается в омах). Ну и самым простым практическим способом узнать силу тока электродвигателя будет просто его измерить при работе движка амперметром, токовыми клещами.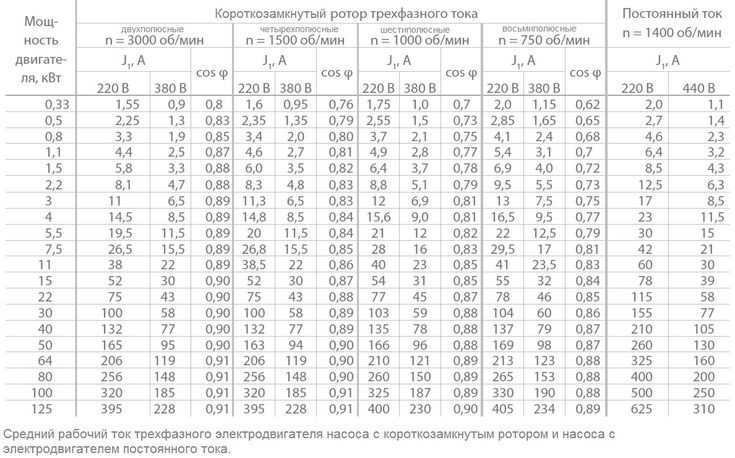
P.S. С опытом Вы научитесь уже по размеру и внешнему виду самого движка определять его мощность, напряжение питания, ну и силу тока, которую он потребляет. Большинство электродвигателей стандартизированы, и сам внешний вид уже указывает на его основные характеристики. Ну, а для большей уверенности уже можно воспользоваться формулами или практическими измерениями.
Диаграммы тока двигателя | R&M Electric Group
Технические ресурсы
Мы собрали ряд технических ресурсов для использования в качестве справочного материала по электрическим проектам.
Скачать в формате PDF
Таблицы выбора – трехфазные двигатели
Электродвигатели переменного тока – таблицы тока при полной нагрузке (приблизительно 1450 об/мин)
(приведены в качестве руководства по выбору подходящего механизма управления MEM). Таблицы основаны на двигателях со средним КПД и коэффициентом мощности примерно 1450 об/мин. Двигатели с более высокой скоростью обычно потребляют меньший ток, чем указанный в таблице; в то время как двигатели с более низкой скоростью обычно потребляют более высокий ток. Могут возникнуть большие отклонения от этих цифр, особенно для однофазных двигателей, и инженеры должны, когда это возможно, определять фактическое значение f.l.c. по паспортной табличке двигателя в каждом случае.
Таблицы основаны на двигателях со средним КПД и коэффициентом мощности примерно 1450 об/мин. Двигатели с более высокой скоростью обычно потребляют меньший ток, чем указанный в таблице; в то время как двигатели с более низкой скоростью обычно потребляют более высокий ток. Могут возникнуть большие отклонения от этих цифр, особенно для однофазных двигателей, и инженеры должны, когда это возможно, определять фактическое значение f.l.c. по паспортной табличке двигателя в каждом случае.
Однофазные двигатели
| НОМИНАЛЬНАЯ МОЩНОСТЬ ДВИГАТЕЛЯ | л.с. | ПРИБЛ. Ф.Л.К. НАПРЯЖЕНИЕ В ЛИНИИ | ||
|---|---|---|---|---|
| 110 В~ | 220 В~ | 240 В~ | ||
| 0,07 кВт | 1/12 | 2,4 | 1,2 | 1,1 |
| 0,1 кВт | 1/8 | 3,3 | 1,6 | 1,5 |
| 0,12 кВт | 1/6 | 3,8 | 1,9 | 1,7 |
| 0,18 кВт | 1/4 | 4,5 | 2,3 | 2,1 |
| 0,25 кВт | 1/3 | 5,8 | 2,9 | 2,6 |
| 0,37 кВт | 1/2 | 7,9 | 3,9 | 3,6 |
| 0,56 кВт | 3/4 | 11 | 5,5 | 5 |
| 0,75 кВт | 1 | 15 | 7,3 | 6,7 |
| 1,1 кВт | 1,5 | 21 | 10 | 9 |
| 1,5 кВт | 2 | 26 | 13 | 12 |
| 2,2 кВт | 3 | 37 | 19 | 17 |
| 3 кВт | 4 | 49 | 24 | 22 |
| 3,7 кВт | 5 | 54 | 27 | 25 |
| 4 кВт | 5,5 | 60 | 30 | 27 |
| 5,5 кВт | 7,5 | 85 | 41 | 38 |
| 7,5 кВт | 10 | 110 | 55 | 50 |
Трехфазные двигатели
| МОЩНОСТЬ ДВИГАТЕЛЯ | л. с. с. | ПРИБЛ. Ф.Л.К. НАПРЯЖЕНИЕ | ||||
|---|---|---|---|---|---|---|
| 220 В~ | 240 В~ | 380 В~ | 415 В~ | 550 В~ | ||
| 0,1 кВт | 1/8 | 0,7 | 0,6 | 0,4 | 0,4 | 0,3 |
| 0,12 кВт | 1/6 | 1 | 0,9 | 0,5 | 0,5 | 0,3 |
| 0,18 кВт | 1/4 | 1,3 | 1,2 | 0,8 | 0,7 | 0,4 |
| 0,25 кВт | 1/3 | 1,6 | 1,5 | 0,9 | 0,9 | 0,6 |
| 0,37 кВт | 1/2 | 2,5 | 2,3 | 1,4 | 1,3 | 0,8 |
| 0,56 кВт | 3/4 | 3,1 | 2,8 | 1,8 | 1,6 | 1,1 |
| 0,75 кВт | 1 | 3,5 | 3,2 | 2 | 1,8 | 1,4 |
| 1,1 кВт | 1,5 | 5 | 4,5 | 2,8 | 2,6 | 1,9 |
| 1,5 кВт | 2 | 6,4 | 5,8 | 3,7 | 3,4 | 2,6 |
| 2,2 кВт | 3 | 9,5 | 8,7 | 5,5 | 5 | 3,5 |
| 3,0 кВт | 4 | 12 | 11 | 7 | 6,5 | 4,7 |
| 3,7 кВт | 5 | 15 | 13 | 8 | 8 | 6 |
| 4,0 кВт | 5,5 | 16 | 14 | 9 | 8 | 6 |
| 5,5 кВт | 7,5 | 20 | 19 | 12 | 11 | 8 |
| 7,5 кВт | 10 | 27 | 25 | 16 | 15 | 11 |
| 9,3 кВт | 12,5 | 32 | 20 | 18 | 14 | |
| 10 кВт | 13,5 | 37 | 34 | 22 | 20 | 15 |
| 11 кВт | 15 | 41 | 37 | 23 | 22 | 16 |
| 15 кВт | 20 | 64 | 50 | 31 | 28 | 21 |
| 18 кВт | 25 | 67 | 62 | 39 | 36 | 26 |
| 22 кВт | 30 | 74 | 70 | 43 | 39 | 30 |
| 30 кВт | 40 | 99 | 91 | 57 | 52 | 41 |
| 37 кВт | 50 | 130 | 119 | 75 | 69 | 50 |
| 45 кВт | 60 | 147 | 136 | 86 | 79 | 59 |
| 55 кВт | 75 | 183 | 166 | 105 | 96 | 72 |
| 75 кВт | 100 | 239 | 219 | 138 | 125 | 95 |
| 90 кВт | 125 | 301 | 269 | 170 | 156 | 117 |
| 110 кВт | 150 | 350 | 325 | 205 | 189 | 142 |
| 130 кВт | 175 | 410 | 389 | 245 | 224 | 169 |
| 150 кВт | 200 | 505 | 440 | 278 | 255 | 192 |
Скачать в формате PDF
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ: Информация на этой странице и в PDF-файле предназначена только для информации, и R&M Electrical Group Ltd не несет ответственности за любую содержащуюся на ней информацию.
Анализ сигнатуры тока двигателя — Artesis
Содержание
В течение многих лет в отрасли мониторинга состояния широко используется анализ вибрации. Использование асинхронных двигателей в промышленных приводах довольно распространено, поскольку они считаются надежными, экономичными и прочными. Фактически, они даже стали рабочими лошадками в промышленности, потому что играют важную роль, когда речь идет о преобразовании электрической энергии в механическую. Поскольку обеспечение безопасной эксплуатации в значительной степени зависит от надлежащего технического обслуживания, диагностики неисправностей, безопасной эксплуатации и эксплуатационной надежности, существует множество традиционных методов и инструментов, используемых для контроля асинхронных двигателей. В этой статье мы более подробно рассмотрим анализ сигнатуры тока двигателя.
Вам может быть интересно: Мониторинг состояния двигателя
Даже со всеми инструментами, используемыми для мониторинга асинхронных двигателей на предмет высокой степени надежности, компании все еще боролись с серьезными проблемами, такими как сокращение срока службы двигателя и непредвиденные системные сбои. Существует несколько методов мониторинга состояния, таких как мониторинг температуры и мониторинг вибрации, для которых требуются дорогостоящие датчики, в то время как текущий мониторинг вообще не требует каких-либо дополнительных датчиков. Итак, давайте сначала разберемся с анализом характеристик тока двигателя и посмотрим, какую важную роль он играет в революции в области мониторинга состояния.
Существует несколько методов мониторинга состояния, таких как мониторинг температуры и мониторинг вибрации, для которых требуются дорогостоящие датчики, в то время как текущий мониторинг вообще не требует каких-либо дополнительных датчиков. Итак, давайте сначала разберемся с анализом характеристик тока двигателя и посмотрим, какую важную роль он играет в революции в области мониторинга состояния.
Концепция MCSA возникла в начале 1970-х годов. Первоначально MCSA предлагался как инструмент, который можно использовать для мониторинга двигателей в суровых условиях и опасных зонах на атомных электростанциях. Анализ сигнатуры тока двигателя можно охарактеризовать как метод, который помогает определить рабочее состояние асинхронного двигателя, не нарушая производственный процесс. Другими словами, он улавливает электрический сигнал, содержащий токовые компоненты, и идентифицирует неисправности на начальном этапе. Таким образом, он играет ключевую роль в предотвращении повреждений и диагностике отказа двигателя. Вы можете подписаться на эта ссылка для дальнейшего чтения.
Таким образом, он играет ключевую роль в предотвращении повреждений и диагностике отказа двигателя. Вы можете подписаться на эта ссылка для дальнейшего чтения.
Анализ характеристик тока двигателя помогает обнаружить следующее:
- Дисбаланс/несоосность
- Дефектные подшипники
- Повреждение стержня ротора
- Проблемы с загрузкой
- Динамический эксцентриситет
- Статический эксцентриситет
Давайте рассмотрим пример сигнала тока, который вы получаете от источника питания двигателя, не нарушая работу машины. При анализе сигнатуры тока двигателя частотный спектр (сигнатура тока) получается путем обработки сигнала тока. В случае неисправности частотный спектр становится не таким, как у исправного двигателя. Обнаружение неисправности асинхронного двигателя и контроль состояния осуществляются с помощью методов обработки сигналов, поскольку они экономически эффективны, а их реализация довольно проста. Кроме того, реализация MCSA помогает провести точный анализ неисправности.
Кроме того, реализация MCSA помогает провести точный анализ неисправности.
Для идентификации эксклюзивных шаблонов сигнатур тока и предоставления более широкого динамического диапазона различных неисправностей используется зависимость децибел (дБ) от частотного спектра. Это помогает выявить такие дефекты, как неисправности статора, блуждания ротора, неисправности подшипников и эксцентриситет, а также может быть комбинация этих неисправностей.
Анализ характеристик тока двигателя эффективен для прогнозирования как электрических, так и механических ошибок. Неисправности, которые может обнаружить MCSAНиже перечислены неисправности, которые может обнаружить анализ характеристик тока двигателя:
Неисправности подшипников Обычно в подшипниках качения имеется два кольца. Когда рабочие условия нормальные и существует баланс между хорошей центровкой и нагрузкой, отказы из-за усталости обычно начинаются с небольших трещин.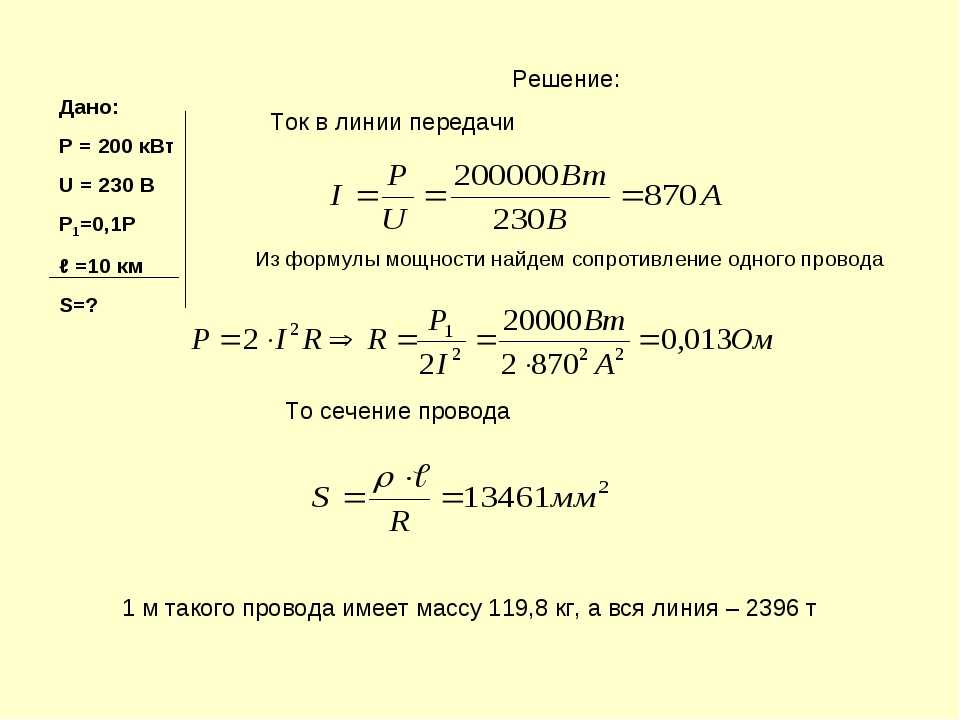 Это означает, что они медленно распространяются, чтобы начать создавать заметные вибрации и уровни шума. Понятно, что обнаружить неисправность подшипников двигателя непросто из-за различных причин, таких как несоосность. Именно здесь MCSA вмешивается для выявления дефектов путем обнаружения частотных составляющих – f 0 (нижняя частота) и f 1 (верхняя частота).
Это означает, что они медленно распространяются, чтобы начать создавать заметные вибрации и уровни шума. Понятно, что обнаружить неисправность подшипников двигателя непросто из-за различных причин, таких как несоосность. Именно здесь MCSA вмешивается для выявления дефектов путем обнаружения частотных составляющих – f 0 (нижняя частота) и f 1 (верхняя частота).
Мы знаем, что определенные асинхронные двигатели сталкиваются с проблемой поломки стержней ротора из-за тяжелых рабочих циклов, но они не вызывают отказ асинхронного двигателя. Однако они могут привести к другим повреждениям. Например, неисправный механизм может сломать детали и вызвать механические повреждения и выход из строя обмотки, что напрямую повлияет на производство и приведет к дорогостоящему ремонту.
Эксцентриситет воздушного зазора Эта неисправность приводит к тому, что длина воздушного зазора не остается постоянной в зависимости от времени и угла окружности статора.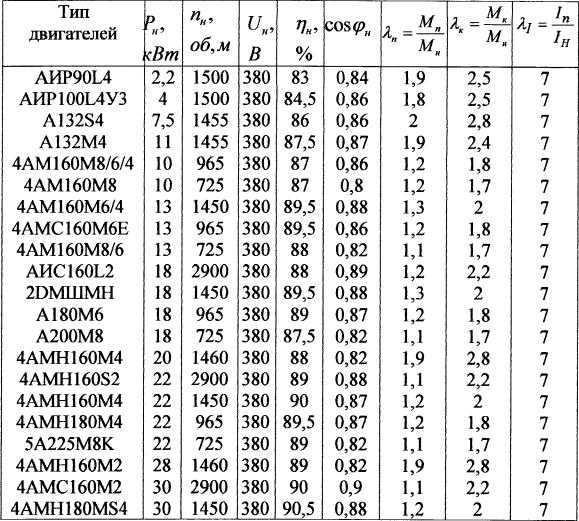 Это происходит при отсутствии равномерного воздушного зазора между статором и ротором. Существует три типа эксцентриситета воздушного зазора: динамический, статический и смешанный эксцентриситет.
Это происходит при отсутствии равномерного воздушного зазора между статором и ротором. Существует три типа эксцентриситета воздушного зазора: динамический, статический и смешанный эксцентриситет.
Электрические подводные насосы (ESP) являются прекрасным примером важности MCSA в изменении лица контроль состояния промышленности . Поскольку ЭЦН играют важную роль в операциях с газом и нефтью, они считаются одним из наиболее подходящих вариантов, поскольку в пласте недостаточно энергии для добычи нефти и требуется экономичный метод подъема для увеличения потока жидкости.
Однако тяжелые условия эксплуатации некоторых насосов влияют на их надежность. В результате возникают отказы ЭЦН из-за наличия мелких частиц породы, резких изменений условий скважины, наличия газа и даже повышения температуры. Учитывая, что ЭЦН начала выходить из строя из-за множества внешних и внутренних факторов, напрямую влияющих на производство, возникла необходимость в решении, которое могло бы снизить риски.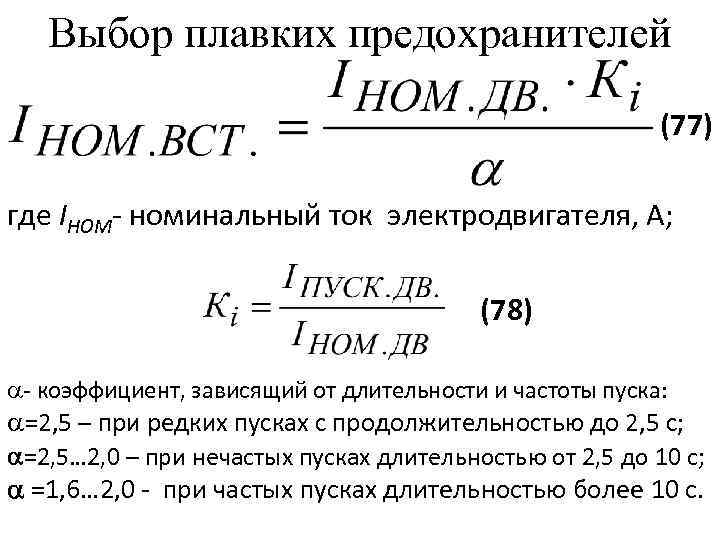 Именно здесь MCSA выступил в качестве идеального решения, поскольку он анализирует данные о токе и напряжении с использованием передовых алгоритмов и помогает обнаруживать проблемы на ранней стадии, чтобы предотвратить любой ущерб.
Именно здесь MCSA выступил в качестве идеального решения, поскольку он анализирует данные о токе и напряжении с использованием передовых алгоритмов и помогает обнаруживать проблемы на ранней стадии, чтобы предотвратить любой ущерб.
С введением MCSA предыдущие средства контроля состояния ESP больше не кажутся очень эффективными, поскольку систему MCSA можно установить в шкафу управления двигателем (идеальная среда для точного снижения рисков системой). Что делает датчики MCSA настолько эффективными, так это то, что они способны собирать данные независимо от условий эксплуатации. Таким образом, MCSA обеспечивает непрерывный поток данных самого высокого качества.
Теперь давайте обсудим алгоритмы обнаружения аномалий в ESP и способы проверки каждого двигателя и насоса. Однако с MSCA нет необходимости проверять каждый насос вручную, так как команда инженеров может легко контролировать сотни насосов. Система на основе MSCA просто устранила кропотливый и трудоемкий процесс ручной проверки каждого двигателя и насоса. Алгоритмы обнаружения аномалий также указывают, какие насосы работают неправильно. Это помогает команде технического обслуживания сосредоточиться на тех насосах, которые требуют срочного ремонта. Кроме того, это также указывает на корень проблемы.
Однако с MSCA нет необходимости проверять каждый насос вручную, так как команда инженеров может легко контролировать сотни насосов. Система на основе MSCA просто устранила кропотливый и трудоемкий процесс ручной проверки каждого двигателя и насоса. Алгоритмы обнаружения аномалий также указывают, какие насосы работают неправильно. Это помогает команде технического обслуживания сосредоточиться на тех насосах, которые требуют срочного ремонта. Кроме того, это также указывает на корень проблемы.
MCSA имеет алгоритмы классификации, которые помогают идентифицировать различные шаблоны, связанные с различными механизмами отказов. Например, при повреждении статора кавитация в насосе будет иметь другую картину. Если какой-то механизм не работает должным образом, он оставит отметку на текущей синусоиде, что указывает на то, что ремонтная бригада должна его проверить. Некоторые другие неисправности, которые может обнаружить MCSA:
- Перегрев и искрение из-за сломанных или поврежденных стержней ротора
- Эксцентриситет воздушного зазора
- Повреждение подшипника
- Влияние нагрузки
- Кавитация
- Влияние износа на оборудование
