
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования: это соотношениек, при которых работа привода при существующих нагрузках будет устойчивой;
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
 Вверх или вниз от скорости, определяемой
естественной характеристикой.
Вверх или вниз от скорости, определяемой
естественной характеристикой.
 Вверх или вниз от скорости, определяемой
естественной характеристикой.
Вверх или вниз от скорости, определяемой
естественной характеристикой.Запишем уравнение электромеханической характеристики:
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю .
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования: это соотношениек, при которых работа привода при существующих нагрузках будет устойчивой;
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 Оцениваются
капитальные затраты, потери электроэнергии;
Оцениваются
капитальные затраты, потери электроэнергии;Запишем уравнение электромеханической характеристики:
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю .
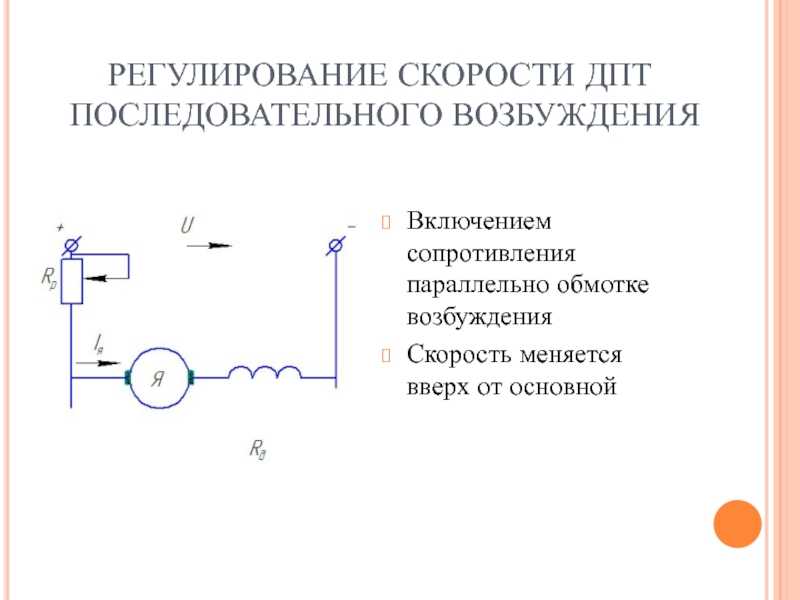
Регулирование скорости изменением сопротивления якорной цепи.
Регулирование скорости введениемобеспечивает приснижение скорости двигателя.
Оценим приведенный способ регулирования:
Диапазон регулирования не превышает 3:1, т.
к. работа при низких скоростях
нестабильна незначительное изменение МРегулирование ступенчатое;
Регулировать можно только вниз от основной скорости.
 к. работа при низких скоростях
нестабильна незначительное изменение М
к. работа при низких скоростях
нестабильна незначительное изменение МII. Регулирование скорости изменением магнитного потока.
Отметим, что изменение Ф возможно лишь в сторону уменьшения, т.е. в режиме, близком к номинальному, магнитная система двигателя насыщена. Уменьшение Ф<ФНприводит к увеличениюи увеличенной просадке скорости.
Т.к. , то при ослаблении поля электрического двигателя, приMC=const,IC.
Оценим заданный способ регулирования:
Диапазон регулирования для большинства двигателей (1,5…2):1
Для двигателя независимого возбуждения можно обеспечить плавное регулирование.
Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения.
Регулирование wвозможно только вверх от основной скорости.
Регулирование скорости изменением подводимого напряжения.
При изменении подводимого напряжения изменяется лишь скорость идеального Х.Х. , поэтому все характеристики расположены параллельно друг другу и параллельно естественной характеристике.
Оценим данный способ регулирования:
Диапазон регулирования (20…30):1
Регулирование скорости плавное
Отличается экономичностью, т.к. энергия торможения возвращается в сеть
Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯвышеUЯН.
6.4.4 Способы регулирования скорости двигателя постоянного тока
Анализ уравнения (6.22) позволяет определить способы регулирования скорости электродвигателей. Для регулирования скорости можно использовать изменение следующих параметров электродвигателя:
изменением сопротивления якорной цепи путем введения добавочных сопротивлений;
изменением магнитного потока путем введения дополнительного сопротивления в цепь обмотки возбуждения;
изменением напряжения, подводимого к якорной цепи при наличии индивидуального источника питания двигателя.
Механические характеристики двигателя при постоянстве параметров rя, Ф0, U, представляют собой линейные зависимости:
ω = а — М · b
Механическая
характеристика двигателя, полученная
при отсутствии добавочных сопротивлений
в якорной цепи, при номинальных значениях
магнитного потока и питающего напряжения
называется естественной.
Изменяя тот или иной параметр механической характеристики можно для заданных значений момента сопротивления на валу двигателя получить различные скорости вращения, т.е. регулировать скорость двигателя. Полученные механические характеристики будут называться
Регулирование скорости двигателя изменением сопротивления якорной цепи. Как видно на рисунке 6.13 все характеристики пересекаются в точке ω0 при М = 0. Эта скорость называется скоростью идеального холостого хода и определяется выражением
Если в цепь якоря
включать дополнительные сопротивления,
то механические характеристики,
полученные при этом, называются
искусственными или реостатными.
Реостатные характеристики так же
линейны, как и естественная, но имеют
значительно больший наклон к оси
моментов, т.е. обладают меньшей
жесткостью. Чем больше сопротивление,
тем круче характеристики, тем меньше
ее жесткость.
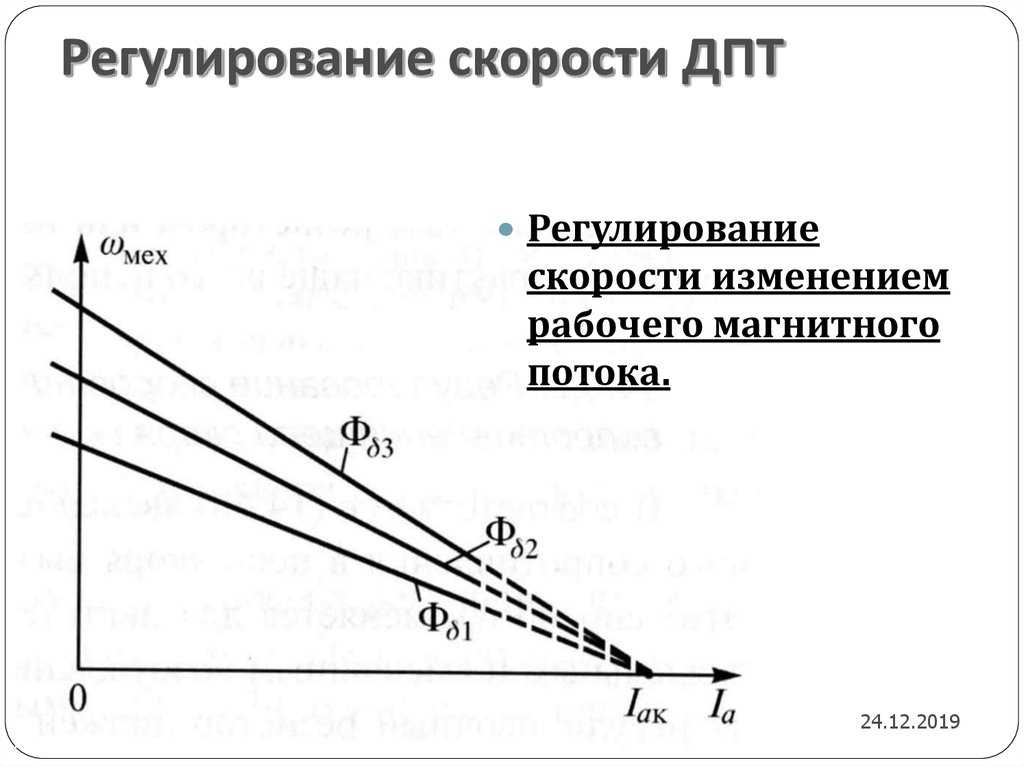
Регулирование скорости вращения двигателя изменением магнитного потока. При включении регулировочного реостата в цепь обмотки возбуждения (рисунок 6.14, а), магнитный поток Ф уменьшается, а скорость двигателя ω растет. Жесткость характеристик при изменении магнитного потока несколько ниже (рисунок 6.14, б), чем у естественной. Следует обратить внимание на то, что при малых значениях тока возбуждения, или при случайном обрыве цепи возбуждения скорость вращения двигателя резко возрастает и становится опасной для механической прочности двигателя. Двигатель идет «в разнос». Поэтому при эксплуатации двигателя необходимо следить за исправностью цепи возбуждения.
Рисунок 6.13 – Механические характеристики при изменении сопротивления якоря.
Рисунок 6.14 — Механические характеристики (а) и схема регулирования
скорости изменением магнитного потока (б).
Регулирование
скорости вращения двигателя изменением
напряжения подводимого к якорю
двигателя (рисунок
6.
Такое регулирование
возможно при наличии индивидуального источника питания двигателя. Жесткость характеристики в данном способе регулирования соответствует жесткости естественной характеристики. Раньше часто использовалась схема Г-Д (генератор-двигатель), теперь чаще применяют полупроводниковые преобразователи. Современные преобразователи позволяют получить диапазон регулирования скорости порядка 10000, т.е.
Рисунок 6.15 — Регулирование скорости вращения двигателя изменением напряжения подводимого к якорю двигателя
=10000.
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки.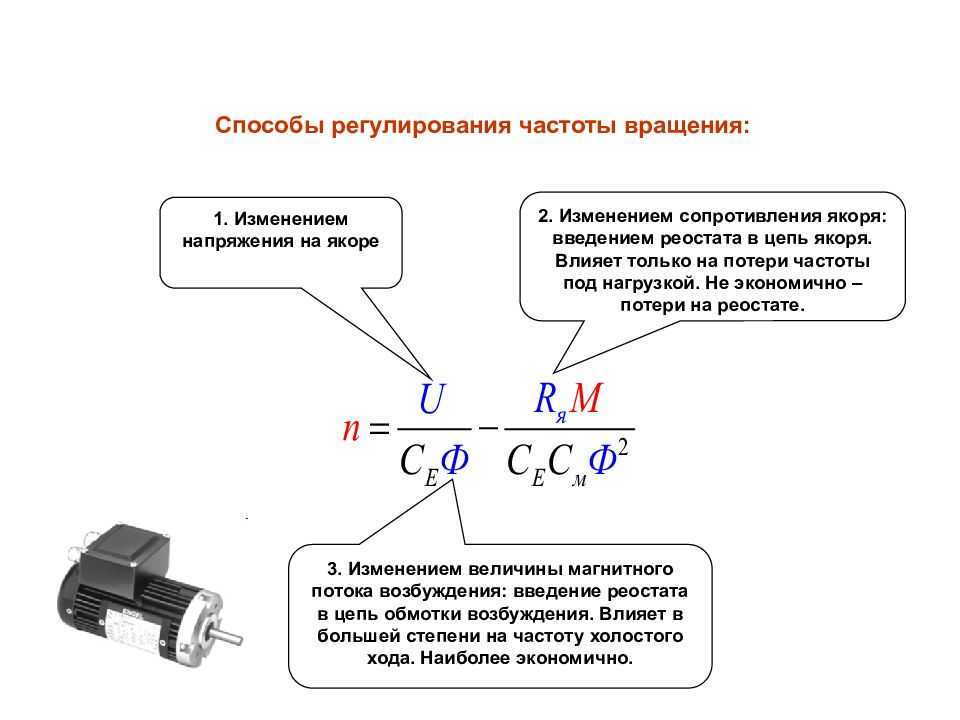 В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Правило левой руки Флеминга В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки. Двигатели постоянного тока имеют высокий пусковой момент.
- Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555. Вот схема этой цепи:
555 Нестабильный мультивибратор с таймером для управления двигателем постоянного тока Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Простой Н-мост Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-Bridge:
Конфигурация транзистора H-Bridge. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D controlling two DC motorsL293D Pin Descriptions
| L293D Pin | Description | ||
| 1 (Enable 1-2) | Controls the left part of the driver | ||
| 2 (Вход-1) | Контакт входа сигнала | ||
| 3 (Выход-1) | Подключается к одной из клемм двигателя | ||
| 4 и 5 | Заземление | 0067 6 (Выход-2) | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала | ||
| 8 (Vcc2) | Напряжение питания двигателя должно быть выше чем 4,5 В | ||
| 9 (enable3-4) | Управляет правой частью драйвера | ||
| 10 (Вход-3) | Входной штифт | ||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Outupt к одному из выводов двигателя | |||
| 12 и 13 | Земля | ||
| 14 (выход-4) | подключается к одной из терминалов мотора | ||
| 15 (вход-4) | Источник питания |
 16 Vss
16 VssНадеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Способы управления скоростью двигателя постоянного тока
Скорость двигателя постоянного тока
Обратная ЭДС E b двигателя постоянного тока есть не что иное, как ЭДС индукции в проводниках якоря из-за вращения якоря в магнитном поле. Таким образом, величина E b может быть задана уравнением ЭДС генератора постоянного тока.
E b = PØNZ / 60A
(где P = количество полюсов, Ø = поток/полюс, N = скорость в об/мин, Z = количество проводников якоря, A = параллельные пути)
E b can also be given as,
E b = V- I a R a
thus, from the above equations
N = E b 60A / P ØZ
, но для двигателя постоянного тока A, P и Z являются константами
Следовательно, N ∝ K E b / Ø (где K = постоянная)
двигатель постоянного тока прямо пропорционален противо-ЭДС и обратно пропорционален потоку на полюс.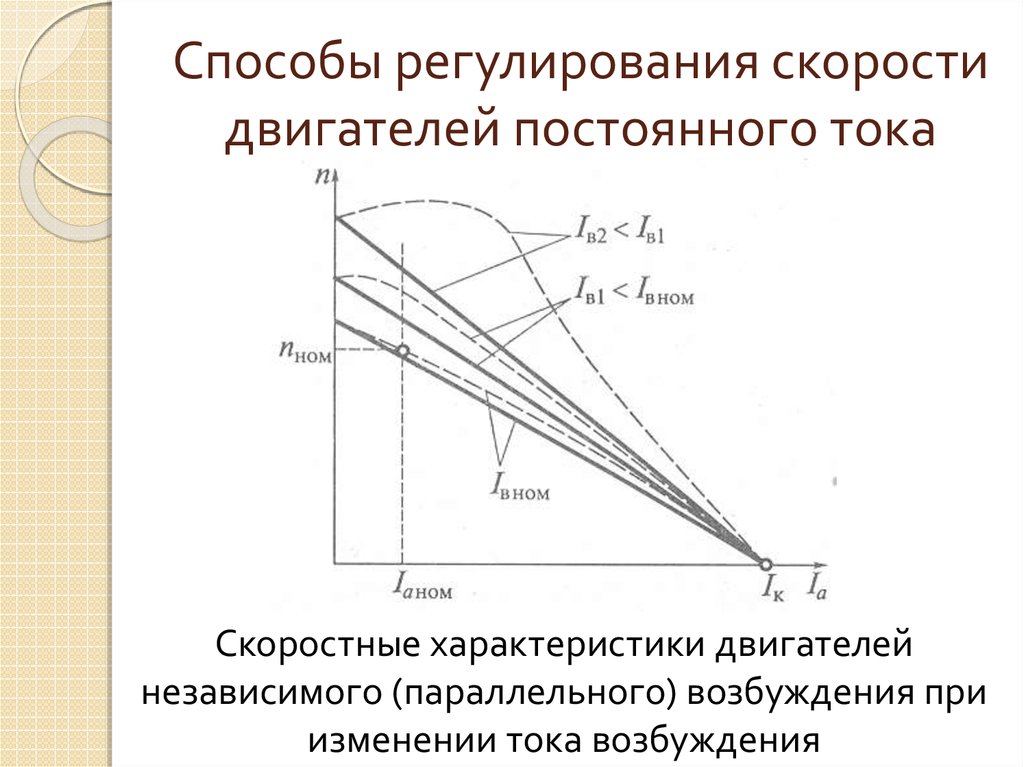
Регулятор скорости шунтового двигателя
1. Метод контроля потока
Выше уже объяснялось, что скорость двигателя постоянного тока обратно пропорциональна потоку на полюс. Таким образом, уменьшая поток, можно увеличить скорость и наоборот.
Для управления потоком последовательно с обмоткой возбуждения добавляется реостат, как показано на принципиальной схеме. Добавление большего сопротивления последовательно с обмоткой возбуждения увеличит скорость, так как уменьшит магнитный поток. В параллельных двигателях, поскольку ток возбуждения относительно очень мал, I ш 2 Р потеря небольшая. Поэтому этот метод достаточно эффективен. Хотя скорость может быть увеличена выше номинального значения за счет уменьшения потока с помощью этого метода, он накладывает ограничение на максимальную скорость, поскольку ослабление потока поля сверх установленного предела отрицательно повлияет на коммутацию.
2. Метод управления якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС E b и E b = V — I a R a . Это означает, что при напряжении питания V и сопротивлении якоря R a остаются постоянными, тогда скорость прямо пропорциональна току якоря I a . Таким образом, если добавить сопротивление последовательно с якорем, I a уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости.
3. Метод контроля напряжения
a) Управление несколькими напряжениями :
В этом методе шунтирующее поле подключается к фиксированному возбуждающему напряжению, а на якорь подается разное напряжение. Напряжение на якоре изменяется с помощью подходящего распределительного устройства. Скорость приблизительно пропорциональна напряжению на якоре.
b) Система Ward-Leonard :
Эта система используется там, где требуется очень чувствительное управление скоростью двигателя (например, электрические экскаваторы, лифты и т. д.). Устройство этой системы показано на рисунке справа.
M 2 — двигатель, для которого требуется регулирование скорости.
M 1 может быть любым двигателем переменного или постоянного тока с постоянной скоростью.
G представляет собой генератор, напрямую соединенный с M 1 .
В этом методе выходной сигнал генератора G подается на якорь двигателя M 2 , скорость которого необходимо контролировать. Выходное напряжение генератора G может изменяться от нуля до максимального значения с помощью его регулятора поля и, следовательно, напряжение якоря двигателя M 2 изменяется очень плавно. Следовательно, этим способом может быть получено очень плавное управление скоростью двигателя постоянного тока .
Регулятор скорости серийного двигателя
1. Метод управления потоком
- Дивертор поля : Переменное сопротивление подключается параллельно последовательному полю, как показано на рис. (a). Этот переменный резистор называется отклоняющим, так как через этот резистор можно отвести желаемую величину тока и, следовательно, можно уменьшить ток через катушку возбуждения. Таким образом, поток можно уменьшить до желаемой величины и увеличить скорость.
- Переключатель якоря : Переключатель подсоединяется к якорю, как показано на рис. (b).
При заданном постоянном крутящем моменте, если ток якоря уменьшается, тогда поток должен увеличиться, как Ta ∝ ØIa
Это приведет к увеличению тока, потребляемого от источника питания, и, следовательно, увеличится поток Ø и, следовательно, скорость двигателя уменьшится. - Управление полем с отводами : Как показано на рис. (c), катушка возбуждения имеет отводы, разделенные числом витков.
