
| |||||
| |||||
| |||||
| |||||
Шаговые двигатели.
 Создаем робота-андроида своими руками [litres]
Создаем робота-андроида своими руками [litres]Читайте также
Советские ядерные двигатели
Советские ядерные двигатели В Советском Союзе работы над ядерными ракетными двигателями начались в середине 50-х годов. В НИИ-1 (научный руководитель — Мстислав Келдыш) инициатором и руководителем работ по ЯРД был Виталий Иевлев. В 1957 году он сделал по этой теме сообщение
Электротермические двигатели
Электротермические двигатели Нам уже известно, что одним из способов увеличения эффективности двигателей для космических кораблей является повышение температуры (а значит и скорости) истекающих газов. Но эту температуру можно поднимать не только с помощью химической
2.
 Вечные двигатели XVI и XVII столетий
Вечные двигатели XVI и XVII столетий
2. Вечные двигатели XVI и XVII столетий Ранние искатели вечного движения редко доверяли бумаге свои мысли и изобретения, и хотя большинство первых печатных книг касалось наук и ремесел, лишь в некоторых из них можно найти упоминание о перпетуум мобиле.Вечный двигатель описан
Двигатели постоянного тока
Двигатели постоянного тока Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. рис. 4.13). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий
Шаговые двигатели
Шаговые двигатели
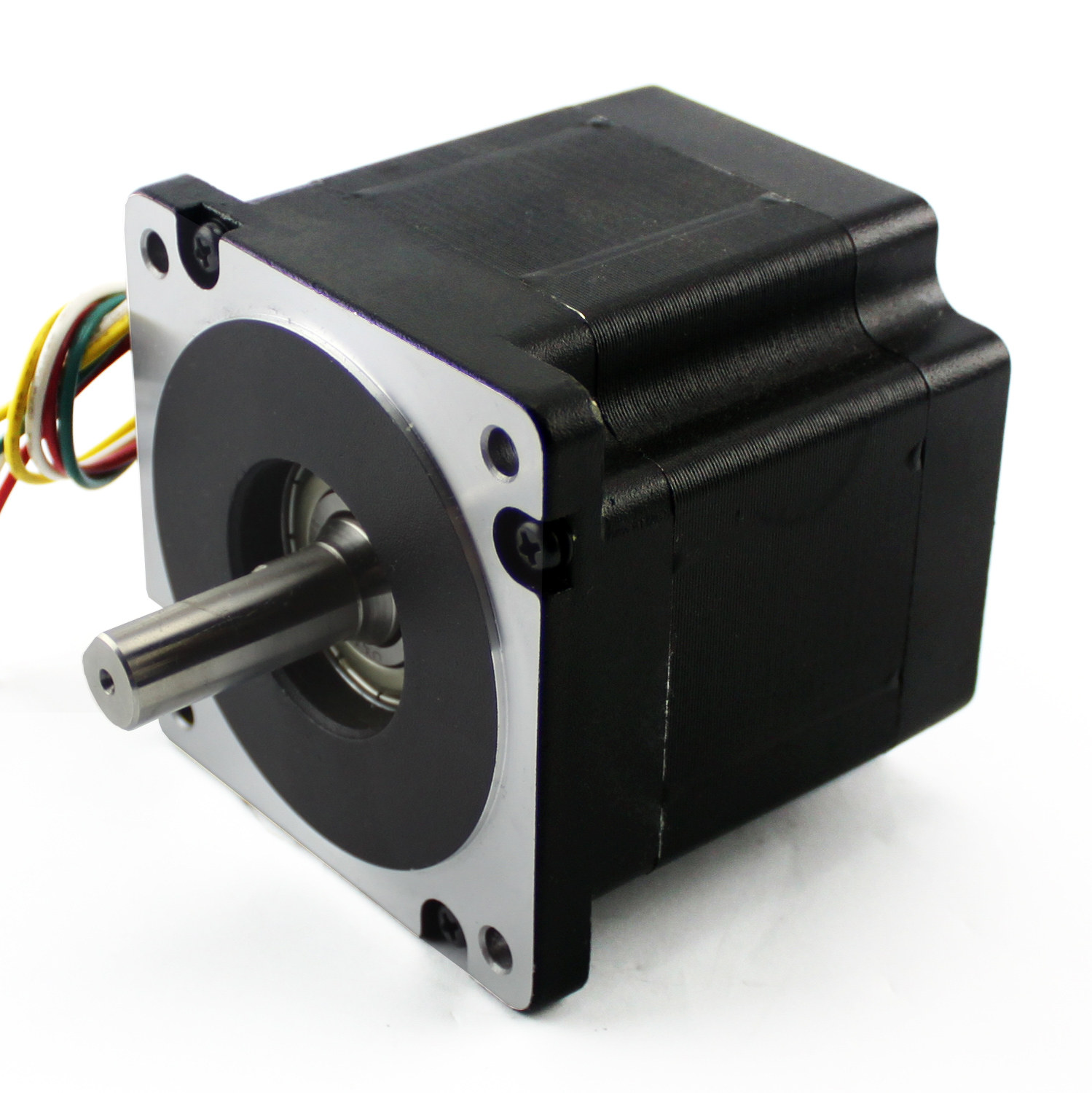
B качестве ходовых двигателей платформы лучше всего использовать шаговые двигатели.
Шаговые двигатели
Шаговые двигатели На рис 10.11. изображена эквивалентная электрическая схема используемого нами двигателя. Двигатель имеет шесть проводников, выходящих из его корпуса. Рис. 10.11. Схема выводов однополярного шагового двигателяПредположим, что мы только что взяли двигатель
Двигатели заставляют мир вращаться
Двигатели заставляют мир вращаться Вентиляторами и насосами дело не кончается. Они приводятся в движение электродвигателями. Институт Рокки Маунтин в 1989 г. показал, как объединить 35 усовершенствований на участке между электрическим счетчиком и входным валом
Двигатели «МОТОР СИЧ» для российских вертолетов
Двигатели «МОТОР СИЧ» для российских вертолетов Вячеслав БОГУСЛАЕВ, председатель совета директоров ОАО «Мотор Сич»Ни для кого не секрет, что подавляющее большинство российских вертолетов сегодня оснащается двигателями производства запорожского ОАО «Мотор Сич».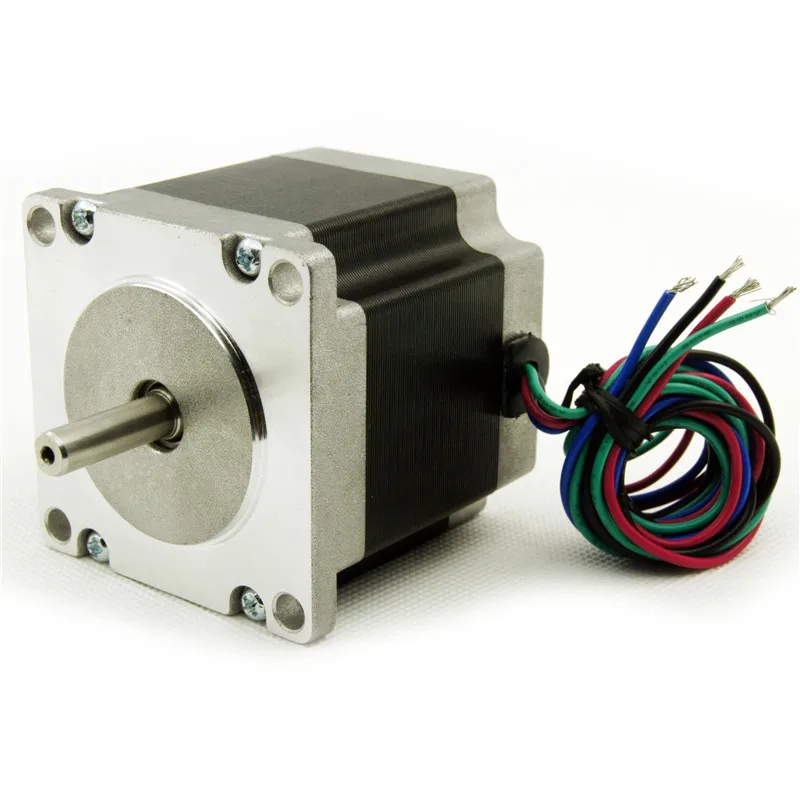 ОАО
ОАО
§ 46. Двигатели внутреннего сгорания
§ 46. Двигатели внутреннего сгорания Двигатели внутреннего сгорания (ДВС) являются поршневыми тепловыми двигателями, в которых топливо сгорает непосредственно внутри рабочего цилиндра. Образующаяся при сгорании смесь газов, расширяясь, перемещает поршень, совершающий
Часть первая. Двигатели фантастических скоростей
Часть первая. Двигатели фантастических скоростей Глава I. На дальних подступах В этой главе рассказывается о последних успехах поршневых авиационных двигателей и закате их славы, о том, почему они не смогли преодолеть «звуковой барьер» и навсегда потеряли свое былое
Глава V.
 Двигатели-гибриды
Двигатели-гибриды
Глава V. Двигатели-гибриды Эта глава знакомит читателя с некоторыми новыми двигателями, представляющими разнообразные сочетания уже известных двигателей и обладающими замечательными свойствами, что позволяет думать об их почетном месте в авиации будущего.Времена,
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ Важнейшими научными предпосылками электромеханики послужили достижения в области электродинамики и открытие электромагнитной индукции. Свою положительную роль при разработке первых конструкций электрических машин и электромагнитных
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ
Массовое применение асинхронных двигателей потребовало их серийного выпуска как в предвоенные, так и в послевоенные годы. В 70-х годах наиболее широкое распространение получили короткозамкнутые асинхронные двигатели общего назначения серии
В 70-х годах наиболее широкое распространение получили короткозамкнутые асинхронные двигатели общего назначения серии
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic Интересно, а критик Э. Гилл пишет ресторанные обзоры, если у него простуда? Потому что, конечно, если у вас в глазах слезы, голова заполнена жидкой ртутью, а из носа капает,
| |||||||||||
 тел 8-926-743-12-76
тел 8-926-743-12-76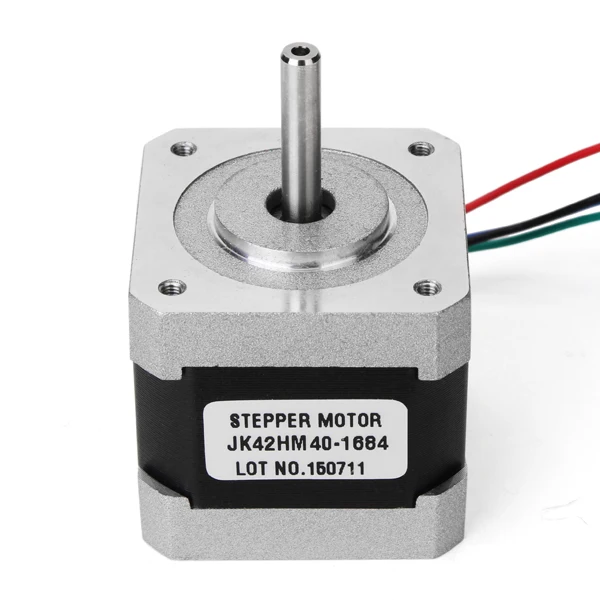 2 Технические
данные шагового электродвигателя ШДР-711
2 Технические
данные шагового электродвигателя ШДР-711 515..166 и признан годным к
эксплуатации.
515..166 и признан годным к
эксплуатации. Режим работы — продолжительный.
Режим работы — продолжительный. 4.2 Габаритные и установочные
размеры,мм шаговых электродвигателей серии ШДР
4.2 Габаритные и установочные
размеры,мм шаговых электродвигателей серии ШДР 4.3 Сравнительные технические
характеристики эл.двигателей серии ШДР
4.3 Сравнительные технические
характеристики эл.двигателей серии ШДР
столетию со дня рождения Марка Моисеевича Минкина
Александр Микеров,
д. т. н., проф. каф.
систем автоматического управления
СПбГЭТУ «ЛЭТИ»
Бесконтактные моментные двигатели, занимающие сейчас существенный сектор рынка электродвигателей малой мощности, появились после Второй мировой войны, главным образом в связи с развитием ракетно-космической техники. Видимые отличия таких электродвигателей — это отсутствие корпуса, вала и подшипников, поскольку они предназначены для встраивания в объект управления без редуктора.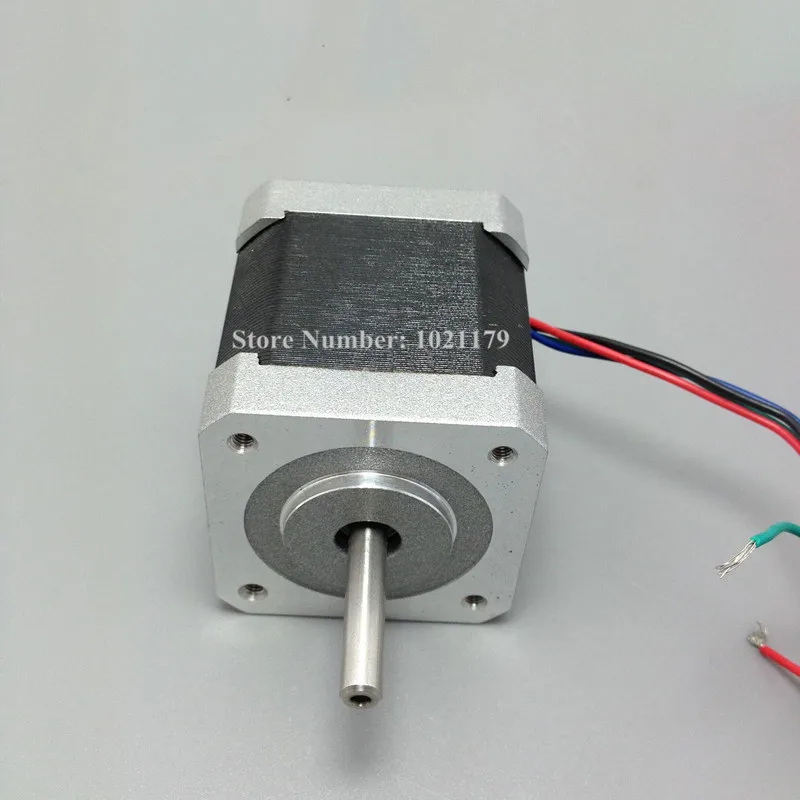 Электропривод с моментным двигателем сейчас называется прямым приводом (direct drive). Типичный привод такого типа, использующийся для стабилизации платформы (1) на борту летательного аппарата (рис. 1), содержит: моментный двигатель (2), датчики положения ротора (3) и платформы (4). Кроме того, привод имеет большое центральное отверстие (5) для волноводов и кабелей и снабжен теплоотводом (6) с датчиком перегрева (7) [1].
Электропривод с моментным двигателем сейчас называется прямым приводом (direct drive). Типичный привод такого типа, использующийся для стабилизации платформы (1) на борту летательного аппарата (рис. 1), содержит: моментный двигатель (2), датчики положения ротора (3) и платформы (4). Кроме того, привод имеет большое центральное отверстие (5) для волноводов и кабелей и снабжен теплоотводом (6) с датчиком перегрева (7) [1].
Рис. 1. Прямой привод
Название «прямой привод» пошло от построенной в 1842 г. англичанином Робертом Дэвидсоном (Robert Davidson) железнодорожной повозки, колеса которой насаживались прямо на валы двигателей без редуктора, что породило также популярный в отечественной литературе термин «безредукторный привод» [2].
Однако редуктор — это не только дорогостоящий и шумный узел, но еще и коварный враг точности управляемого электропривода из-за наличия зазоров (люфтов) и упругих деформаций. Неудивительно, что моментные двигатели прежде всего нашли применение в гироскопах, оптических приборах и антеннах. Однако они проектировались вместе с самим прибором, что определяло их уникальность. В 1948 г. американская компания Inland Motors вышла на рынок с первыми серийными встраиваемыми (бескорпусными) двигателями с моментом до 4000 Нм (рис. 2).
Однако они проектировались вместе с самим прибором, что определяло их уникальность. В 1948 г. американская компания Inland Motors вышла на рынок с первыми серийными встраиваемыми (бескорпусными) двигателями с моментом до 4000 Нм (рис. 2).
Рис. 2. Встраиваемый моментный двигатель
Данные двигатели включали три узла: статор с постоянными магнитами (1), ротор с обмоткой (2) и щеточно-коллекторный узел (3) [3]. Таким образом, это были коллекторные двигатели, что, конечно, практически аннулировало достоинства прямого привода.
В СССР исследования моментных двигателей проводились в Казанском авиационном институте под руководством профессора Льва Израилевича Столова. Создавались эти двигатели также в основном в составе навигационной аппаратуры ряда предприятий, таких как ЦНИИ «Электроприбор» и НИИКП (Ленинград), НИИП (Москва) и др. [1, 4]. При этом щеточно-коллекторный узел часто не требовался, поскольку двигатели имели ограниченный угол поворота. Вопрос о необходимости создания серийных бесконтактных моментных двигателей был поднят в ЦНИИАГ (Москва), разрабатывавшем рулевые приводы первых советских ракет главного конструктора Сергея Павловича Королева Р1–Р7 [5]. В этих приводах первоначально использовались обычные коллекторные двигатели постоянного тока с редуктором. В ракетах, срок службы которых не превышал десятков часов, такие двигатели удовлетворительно работали даже в условиях космоса. Однако в 1960-х гг., в связи с созданием спутников и космических летательных аппаратов, требования к долговечности приводов возросли сначала до сотен, а затем тысяч часов и даже нескольких лет. Исследования в институтах Академии наук показали, что в условиях космоса механическая смазка всех трущихся пар испарялась, что вызывало быстрый износ и отказ щеточно-коллекторных узлов, подшипников и даже шестеренок. На первых порах пытались использовать герметичную конструкцию электродвигателей, однако и это не позволило поднять срок службы до более чем сотен часов. Назревал вопрос о создании бесконтактных двигателей постоянного тока (БДПТ). Один из первых таких двигателей, разработанный Ильей Абрамовичем Вевюрко во ВНИИЭМ (Москва), имел постоянные магниты на роторе и обмотку на статоре, переключение тока в которой производилось элементами Холла [5].
В этих приводах первоначально использовались обычные коллекторные двигатели постоянного тока с редуктором. В ракетах, срок службы которых не превышал десятков часов, такие двигатели удовлетворительно работали даже в условиях космоса. Однако в 1960-х гг., в связи с созданием спутников и космических летательных аппаратов, требования к долговечности приводов возросли сначала до сотен, а затем тысяч часов и даже нескольких лет. Исследования в институтах Академии наук показали, что в условиях космоса механическая смазка всех трущихся пар испарялась, что вызывало быстрый износ и отказ щеточно-коллекторных узлов, подшипников и даже шестеренок. На первых порах пытались использовать герметичную конструкцию электродвигателей, однако и это не позволило поднять срок службы до более чем сотен часов. Назревал вопрос о создании бесконтактных двигателей постоянного тока (БДПТ). Один из первых таких двигателей, разработанный Ильей Абрамовичем Вевюрко во ВНИИЭМ (Москва), имел постоянные магниты на роторе и обмотку на статоре, переключение тока в которой производилось элементами Холла [5]. Однако эти двигатели имели обычную корпусную конструкцию и скорость в тысячи об/мин.
Однако эти двигатели имели обычную корпусную конструкцию и скорость в тысячи об/мин.
Создание бесконтактных моментных двигателей для ракетно-космических аппаратов началось в середине 1960-х годов в ЦНИИАГ. Сотрудники этого предприятия — Владимир Николаевич Бродовский, Цецилия Львовна Садовская и др. — разработали синхронные моментные двигатели типа ДМВ (двигатель моментный встраиваемый) на основе обычных магнитов Альнико (алюминий-никель-кобальт) [4, 6]. В качестве серийного производства был задействован московский завод «Машиноаппарат» под руководством главного конструктора бортового электрооборудования Георгия Федоровича Каткова, а с 1984 г. Валерия Константиновича Корунова [7].
Рис. 3. Марк Моисеевич Минкин
Завод «Машиноаппарат» был создан в 1942 г. для производства мин замедленного действия и другой военной электротехники. Однако после войны его основной продукцией стало электрооборудование ракетно-космических систем, среди которого наиболее известны: двигатель Д-126 для колес «Лунохода-1», электроприводы бурильных установок на Венере и Марсе, электромагнитные тормоза стыковочных узлов международных космических станций и др. Работы по созданию моментных двигателей начались с конца 1970-х гг. в СКБ этого предприятия под руководством Марка Моисеевича Минкина (рис. 3).
Работы по созданию моментных двигателей начались с конца 1970-х гг. в СКБ этого предприятия под руководством Марка Моисеевича Минкина (рис. 3).
Минкин родился 11 июня 1919 г. в Могилеве, откуда вместе с семьей в следующем году переехал в Москву. В 1937 г. окончил среднюю школу и поступил в МЭИ, вместе с которым в начале войны был эвакуирован в Свердловск и вернулся в Москву только в 1942 г. В 1943 г. окончил МЭИ и работал инженером и научным сотрудником сначала в НИИМЭП, где обучался также в аспирантуре, затем на заводе «Деталь». В 1953 г. Минкин был переведен на завод «Машиноаппарат», где в 1964 г. назначен начальником СКБ, проводившего все значимые разработки предприятия. За создание шаговых двигателей был удостоен звания лауреата Государственной премии СССР (бывшей Сталинской).
Первая проблема, с которой столкнулся завод при запуске производства моментных двигателей, — это отсутствие опыта в данной сфере, поскольку все его электродвигатели были быстроходными, коллекторными, срок службы которых, например, для ракет мог составлять (с учетом приемо-сдаточных испытаний) 48 ч. Одним из таких двигателей был Д-126 «Лунохода-1» (1970 г.), соединенный с колесом многоступенчатым редуктором (рис. 4) [7].
Одним из таких двигателей был Д-126 «Лунохода-1» (1970 г.), соединенный с колесом многоступенчатым редуктором (рис. 4) [7].
Рис. 4. Электродвигатель «Лунохода-1»
Вторая проблема — чересчур широкие и порой противоречивые требования к моментному двигателю. Первоначально работа проводилась по одному ТЗ ЦНИИАГ, но затем этими двигателями заинтересовались в НИИ «Геофизика» для навигационных приборов ракетно-космических комплексов и на предприятиях Министерства радиотехнической промышленности: «Ленинец» (Ленинград), «Фазотрон» (Москва) для авиационных радиолокаторов и «Полет» (Челябинск) для посадочных комплексов, которые подготовили отдельные ТЗ. Предстояла большая работа по увязыванию всех требований этих заданий между собой для создания единого ряда электродвигателей, получивших название ДБМ (двигатель бесконтактный моментный).
Минкин и его коллеги Юрий Миронович Беленький, Валентина Михайловна Матвеева и др. провели в рамках эскизного проекта анализ и оптимизацию конструкций с целью выбора основных параметров машины, таких как: гладкий или пазовый статор, марка магнита, число пар полюсов, магнитная система ротора и т.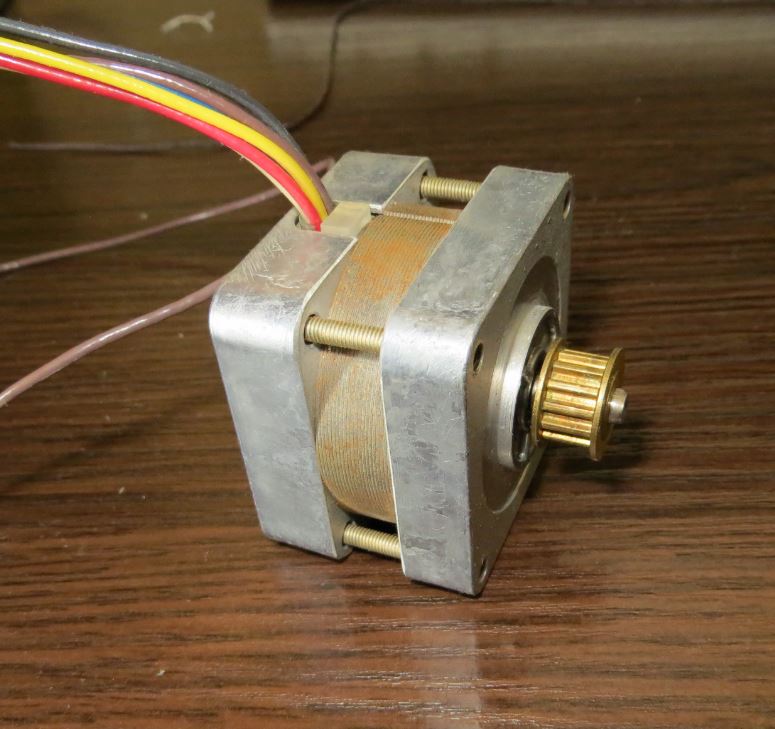 д. Статор (1) такого электродвигателя (рис. 5) выполняется обычно из электротехнической стали с пазами (2), в которые укладывается распределенная обмотка, обеспечивающая наиболее совершенную гармоническую форму индукции в зазоре машины.
д. Статор (1) такого электродвигателя (рис. 5) выполняется обычно из электротехнической стали с пазами (2), в которые укладывается распределенная обмотка, обеспечивающая наиболее совершенную гармоническую форму индукции в зазоре машины.
Рис. 5. Статор моментного двигателя
Однако при этом использование зубцов (3) приводит к залипанию и пульсациям момента по углу поворота ротора, что негативно сказывается на точности моментного электропривода. Радикальным методом борьбы с этой проблемой является беззубцовый (гладкий) статор, в котором обмотка закрепляется с помощью специальной смолы. Однако это существенно увеличивает воздушный зазор, а значит, снижает индукцию в нем и ухудшает массогабаритные характеристики машины. Поэтому моментные двигатели с самого начала пришлось проектировать в двух различных модификациях — с пазовым и гладким статором. Вопрос с выбором типа магнита был решен в пользу самых мощных по тем временам самарий-кобальтовых магнитов владимирского завода «Магнетон». Ранее применявшиеся более дешевые магниты Альнико, хотя и могли обеспечить заданные моменты, имели низкую коэрцитивную силу. Это создавало опасность их размагничивания при частом реверсе двигателя и требовало намагничивания в составе двигателя, что вызывало трудности его производства и хранения.
Ранее применявшиеся более дешевые магниты Альнико, хотя и могли обеспечить заданные моменты, имели низкую коэрцитивную силу. Это создавало опасность их размагничивания при частом реверсе двигателя и требовало намагничивания в составе двигателя, что вызывало трудности его производства и хранения.
Основные параметры двигателей были установлены в результате решения многофакторной оптимизационной задачи. В частности, магнитная система ротора стала содержать тангенциально намагниченные магниты (1) (рис. 6а), что обеспечивало по сравнению с радиально намагниченными (2) (рис. 6б) более хорошую магнитную проводимость зазора (а следовательно, и бо́льшую индукцию в нем), поскольку проводимость самого магнита аналогична воздушному.
Рис. 6. Ротор моментного двигателя с магнитами, намагниченными:
а) тангенциально;
б) радиально
Трудным вопросом был выбор критерия оптимизации. При оптимизации исполнительных электродвигателей (серводвигателей) в качестве такого критерия чаще всего применяют динамическую добротность, равную максимальному развиваемому ускорению KД = MП / Jр, где MП — пусковой момент, Jр — момент инерции ротора. При этом двигатель получается «длинным», т. е. с большим отношением длины к диаметру, подобно Д-126 на рис. 4. Для прямого привода (рис. 1) этот критерий не имеет смысла, потому что присоединенный момент инерции объекта управления гораздо больше момента инерции самого ротора. Поэтому, ДБМ оптимизированы по максимуму статической добротности по моменту
При этом двигатель получается «длинным», т. е. с большим отношением длины к диаметру, подобно Д-126 на рис. 4. Для прямого привода (рис. 1) этот критерий не имеет смысла, потому что присоединенный момент инерции объекта управления гораздо больше момента инерции самого ротора. Поэтому, ДБМ оптимизированы по максимуму статической добротности по моменту
где PП — мощность, потребляемая при пуске, m — масса двигателя (статор и ротор) [8].
В результате все двигатели получились «плоскими» (рис. 7).
Рис. 7. Пазовые двигатели серии ДБМ
Всего было создано семь видов пазовых двигателей (с диаметром 50–185 мм и моментом до 16 Нм) и шесть гладких с диаметром 40–170 мм и моментом до 6 Нм [1, 4, 7].
Необычное новшество, называемое интенсивным использованием, родилось на Госкомиссии по приемке ДБМ, проходившей в 1984 г. под председательством представителя ЦНИИ22 МО Виталия Михайловича Суслова — большого энтузиаста в сфере моментных двигателей. При этом, в отличие от традиционного номинального использования в технических условиях, предлагалось нормировать не предельные значения параметров (моментов, скоростей, форм тока и т. д.) в заданных режимах работы, а только допустимые значения разрушающих факторов — в данном случае температуры (+150 °С) и тока обмотки [3, 6]. В результате ДБМ на напряжение 27 В могут долгое время работать с любой формой фазных токов при напряжении до 80 В в режимах вентильного, синхронного и шагового вращения и всех вариантах включения секций обмотки. Для двухфазных двигателей таких вариантов может быть пять, а для трехфазных — восемнадцать [7]. Правда, при этом проектирование теплоотвода возлагается на потребителя, но это не является очень сложной задачей, поскольку в ДБМ все тепло выделяется в статоре.
Рис. 8. ДБМ40 с ПИМ
Одновременно с двигателями создавались датчики положения ротора. Первым среди них был индуктивный датчик ПИМ (преобразователь индуктивный магнитный), разработанный на заводе «Машиноаппарат» Николаем Николаевичем Мрочковским и Геннадием Иосифовичевым Алексеевым [9]. Такой датчик (1) вставляется в статор двигателя (2) и использует торцевые потоки рассеяния магнитов ротора (3), которые периодически насыщают катушки индуктивности, обеспечивая дискретную коммутацию трехфазного двигателя (рис. 8). Работа этого датчика аналогична датчикам Холла в БДПТ Вевюрко, но применение датчиков Холла в космических условиях и при действии электромагнитного импульса нежелательно.
Из всего ряда ДБМ двигатель ДБМ40 в начале 1980-х гг. был принят первым — Госкомиссией, в которой довелось участвовать автору данной статьи. Всех тогда поразили чистота и порядок в испытательных помещениях завода «Машиноаппарат», где не разрешалась пайка, а запыленность участка ежедневно проверялась военпредами подсчетом пылинок в специальных «мыльницах».
Параллельно по заданию «Ленинца» в ленинградском ВНИИМЭМ Виктор Николаевич Куликов и Людмила Михайловна Епифанова разработали ряд встраиваемых вращающихся трансформаторов (ВТ, редуктосинов) с диаметром 40–120 мм [4, 9]. Первые Госкомиссии по приемке двигателей ДБМ120–ДБМ185 и датчика ВТ120 прошли в 1984 г., после чего сразу началось их серийное производство на заводах «Машиноаппарат» и «Заря» (Ленинград).
Рис. 9. Узлы БМП
Один из первых бесконтактных моментных приводов (БМП) для точных бортовых систем управления с непрерывным вращающимся магнитным полем в двигателе был разработан на «Ленинце» Георгием Сергеевичем Зеленковым, Юрием Павловичем Лукиным и автором данной статьи. Узлы данного БМП показаны на рис. 9, где 1 — статор, 2 — ротор ДБМ120, 3 — редуктосин ВТ40, 4 — транзисторный преобразователь.
Марк Моисеевич Минкин скончался на своем посту 18 марта 1985 г. Через 25 лет Людмила Михайловна Епифанова — основатель и главный конструктор компании «ЭЛМА-Ко» в Санкт-Петербурге — пересмотрела основные концепции ДБМ и предложила перейти от распределенной обмотки статора к сосредоточенной катушечной, а также заменить магниты ротора с тангенциально на радиально намагниченные [6].
В результате был создан новый ряд ДБМВ (двигатель бесконтактный высокомоментный), отличающийся повышенным коэффициентом статической добротности по моменту, меньшей электромеханической постоянной времени и бо́льшим внутренним диаметром ротора. Серийное производство двигателей освоено на заводе «ЛЕПСЕ» в г. Киров.
Автор выражает благодарность генеральному директору Валерию Константиновичу Корунову и секретарю завода «Машиноаппарат» Елене Николаевне Тороповой за ценные материалы биографии Марка Моисеевича Минкина.
Бесконтактные моментные двигатели имеют характеристики классических двигателей постоянного тока, но не содержат щеточно-коллекторного узла, корпуса и подшипников.
Потребность в масштабном производстве таких двигателей в СССР возникла в связи с ростом продолжительности и усложнением условий работы авиационно-космических систем.
Серийное производство и применение ДБМ, разработанных заводом «Машиноаппарат», началось в 1984 г.
В 2010 г. компания «ЭЛМА-Ko», изменив конструкцию обмотки и магнитной системы, создала ДБМВ с улучшенными характеристиками.
Вконтакте
Google+
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
Шаговые двигатели и их микропроцессорные системы управления / Литература по электродвигателям / Stanok-online.ru
Книга название: Шаговые двигатели и их микропроцессорные системы управления
Автор: Т. Кенио
Год печати: 1987
Кол-во страниц: 189
Формат: Djvu
За последние годы в нашей стране и за рубежом начал бурно развиваться процесс создания гибких производственных систем и автоматизированных рабочих мест. Большинство периферийных устройств для этих целей, а также роботов и станков с ЧПУ основано на использовании шаговых двигателей, управление которыми осуществляется от центральной ЭВМ или микропроцессора. Предлагаемая книга японского ученого Такаши Кенио посвящена анализу электромагнитных процессов в шаговых двигателях, микропроцессорным системам управления и практической их реализации в машиностроении. Рассматриваемые в книге вопросы для советских читателей интересны еще и потому, что последняя монография по дискретным шаговым электроприводам под редакцией М.Г. Чиликина была выпущена почти 20 лет назад, когда вопросы микропроцессорного управления только возникали. В книге подробно рассмотрены конструкции реактивных и гибридных шаговых двигателей, а также двигателей с постоянными магнитами. Анализ электромагнитных процессов построен на основе эквивалентных схем замещения магнитной цепи, причем достаточно просто объяснен физический смысл возникновения электромагнитного момента.
Большое внимание уделено динамике работы шаговых двигателей. Математические модели динамических процессов построены как на базе непосредственного решения дифференциальных уравнений динамики, так и на основе анализа передаточных функций. Рассмотрены сложные и недостаточно освещенные в литературе вопросы устойчивости и колебаний шаговых двигателей. Несомненный интерес для широкого круга читателей представляют разделы, посвященные системам управления шаговыми двигателями как с обратной связью по положению ротора, так и без нее. Книга привлекает большим количеством конкретных примеров применения шаговых двигателей в различных областях техники. Несмотря на то, что книга предназначена для научных работников и инженеров-разработчиков шаговых двигателей и оборудования с шаговыми электроприводами, она, несомненно, будет полезна и широкому кругу читателей.
Книга посвящена электрическим машинам, называемым шаговыми двигателями (ШД), и включает описание их конструкций, принципа работы, теории, схем управления, а также особенностей применения. В кратком историческом обзоре развития ШД рассмотрены первые ШД — с соленоидом-храповиком и электрогидравлические ШД. В этой главе описаны и другие типы ШД, однако конструктивные особенности современных двигателей рассмотрены в гл. 2. На рис. 1.1 представлено поперечное сечение типичного современного ШД; это так называемый одшпакетный реактивный двигатель. Для начала разберем (или изучим), как он работает. Сердечник статора имеет шесть выступающих зубцов, в то время как ротор всего четыре. Сердечники как ротора, так и статора выполнены из магии то мягкой стали. Три набора обмоток расположены, как показано на рисунке. Каждый набор состоит из двух катушек, соединенных последовательно. Набор обмоток называется фазой, и, соответственно, машина — трехфазным двигателем.
Скачать бесплатно книгу Шаговые двигатели и их микропроцессорные системы управления
Электроника МС 6312. Небольшой обзор.
Вероятно, наименования «Robotron», «БК», «УКНЦ», «ДВК» знакомы многим читателям данного ресурса. Что там, БКшки, которых было выпущено не одну сотню тысяч, стояли во многих советских классах информатики. Однако, ассортимент советской вычислительной техники этим далеко не ограничен и насчитывает сотни наименований. В этом посте речь пойдет о менее известном аппарате, который на неделе попал ко мне в руки.Аппарат — советский струйный принтер «Электроника МС 6312».
Прототипом для создания принтера, вероятно, послужил «Kodak Diconix 150». Изначально принтер выпускался в корпусе бежевого цвета, позднее — серого и черного.
Кнопки управления и светодиоды.
Подключается данный принтер по интерфейсу LPT (параллельный порт, IEEE 1284). Однако, в отличии от других принтеров, разъема Centronics не имеет. Вместо Centronics»а был применен 25-контактный, соответствующий Canon DB-25F разъем.
По программному обеспечению (драйверам) для Windows совместим с Diconix 150, а так же рядом моделей от Epson. На некоторых форумах можно найти сведения об использовании драйвера Diconix 150 Plus под Windows 7 x64. Помимо IBM совместимых компьютеров, подключить данный принтер можно и к компьютерам серии Электроника БК 00 **. Выполнить это можно двумя способами — используя блок коммутации или напрямую к разъему УП, выполнив небольшую перераспиновку.
Со снятой крышкой.
Плата с кнопками управления и светодиодами.
Электронная начинка полностью отечественная, выполнена на основе комплекта КР580ВМ80А.
КР580ВМ80А — Советский 8-разрядный процессор. Выпускался в различных вариантах с середины 1970-х по середину 1990-х. Процессор содержит 4758 транзисторов, имеет частоту от 2 до 2.5 МГц.
Микропроцессор является основным элементом микропроцессорного комплекта серии КР580. КР580ВВ55(А) — Микросхема обмена параллельной информацией, применяется в качестве элемента ввода/вывода общего назначения. Микросхема имеет три 8-разрядных канала ввода/вывода. Зарубежный аналог — Intel 8255.
КР580ГФ24 — Микросхема специализированного генератора тактовых импульсов, входящая в микропроцессорный комплект КР580. Предназначена для совместной работы с процессором КР580ВМ80А. Выполнена в корпусе DIP16. Зарубежный аналог — Intel 8224.
Платы в принтере установлены этажеркой. Плата питания располагается под платой с процессором. Перечень некоторых компонентов, установленных на плате питания: предохранитель, дроссель, три электролитических конденсатора, четыре керамических.
Принтер имеет два шаговых двигателя. В некоторых образцах можно встретить шаговые двигатели из Японии.
Принтер использует картриджи МС 6901 и МС 6902. Правда, найти данные печатающие головки сейчас практически невозможно. Однако, ситуация не слишком безнадежна. Взамен родных картриджей можно использовать импортный HP 51604A. Для того, чтобы принтер мог работать с зарубежной печатающей головкой HP 51604A, необходимо повысить напряжение питания головки до 24В.
Для этого необходимо заменить стабилитрон КС162А (VD6 по принципиальной схеме принтера) на Д814Д.
На этом, вроде бы, все. Пора собирать обратно… Если у кого из читающих есть что добавить — будет интересно. Спасибо за внимание!
Отслеживание скорости и синхронизация двухмоторной системы с помощью управления скользящим режимом второго порядка
Двухмоторные системы широко используются в промышленных приложениях, и синхронизация скорости двигателей всегда может быть нарушена из-за неопределенностей системных параметров и возмущений крутящего момента нагрузки. В этой статье разработана новая надежная стратегия управления для двухмоторных систем, включающая методы управления скользящим режимом второго порядка (2-SMC). Стратегия состоит в том, чтобы разработать законы управления без вибрации, чтобы стабилизировать отслеживание скорости каждого двигателя при синхронизации их скорости.В предложенной схеме, во-первых, регулятор скорости для одиночного двигателя предназначен для устранения влияния изменения параметров системы и возмущений момента нагрузки. Во-вторых, синхронный контроллер на основе кросс-связанной архитектуры предназначен для уменьшения погрешности скорости двигателей, вызванной несогласованностью характеристик и несбалансированным моментом нагрузки. Устойчивость замкнутой системы анализируется теорией Ляпунова; Доказано, что и ошибки отслеживания скорости, и синхронная ошибка могут сходиться к нулю.Наконец, проводятся эксперименты по проверке эффективности разработанных контроллеров. Результаты экспериментов покажут хорошие характеристики предложенной схемы управления.
1. Введение
Во многих промышленных приложениях, таких как барабанные станки, станки для поверхностного монтажа (SMT), станки с числовым программным управлением (ЧПУ) и портальные краны [1, 2], нагрузка приводится в движение двумя двигателями одновременно. В процессе работы два двигателя приспособлены для отслеживания желаемых траекторий, сохраняя при этом свою скорость одинаковой.Хотя идентичное приводное оборудование будет выбрано на стадии проектирования, отслеживание скорости и синхронизация всегда могут быть ухудшены из-за изменений параметров системы и возмущений крутящего момента нагрузки. Низкая точность отслеживания и синхронизации снизит качество деталей или даже приведет к непригодности продукции [3, 4]. Следовательно, с растущими требованиями к быстрому реагированию и высокой точности управление двухмоторной системой для достижения хороших характеристик отслеживания скорости и синхронизации при наличии различных неопределенностей и возмущений стало большой проблемой в области современного производства.
Распространенными схемами синхронного управления, используемыми в многомоторных системах, являются метод ведущий-ведомый, метод виртуального линейного вала и метод перекрестного управления [5]. В методе «ведущий-ведомый» ведомый двигатель отстает от ведущего, поэтому возникает большая синхронная ошибка во время периодов запуска и выключения. Несмотря на то, что метод виртуального линейного вала обеспечивает хорошую синхронизацию скоростей двух двигателей все время, может существовать постоянная ошибка установившегося состояния между опорной и реальной скоростью.Метод перекрестно-связанного управления был первоначально предложен и успешно применен для управления двухосным движением с ЧПУ Кореном [6]. Синхронизация многоосного движения была улучшена Sun, Barton and Alleyne и Lin et al. посредством включения адаптивного управления, управления итеративным обучением и управления нейронной сетью в кросс-связанный контроль, соответственно [7–9]. В [7] был разработан многоосный синхронный адаптивный контроллер, сходимость ошибок слежения и синхронных ошибок могла быть гарантирована.В [8] были всесторонне рассмотрены проблемы слежения за одной осью и многоосевой синхронизации, был разработан многоосевой контроллер с итеративным обучением, а также улучшена точность слежения за системой. В [9] сеть радиальных базисных функций с функциональными связями (FLRBF) применялась для управления двухмоторной системой, веса в сети были оптимизированы в режиме онлайн, а ошибки отслеживания скорости и синхронные ошибки могли быть уменьшены одновременно. Хотя упомянутая ранее стратегия управления может прилагать некоторые усилия для повышения точности управления, различные неопределенности системы и большие возмущения нагрузки не были приняты во внимание.
Метод скользящего управления (SMC) привлек внимание многих ученых своей простотой и надежностью [10–14]. В этом методе траектории системы вынуждены скользить по заданному многообразию, и тогда вся система будет демонстрировать свойство инвариантности к изменениям параметров и внешним возмущениям. Из-за ограниченной частоты дискретизации и высоких коэффициентов усиления, выбранных для выхода за границы неопределенности, в системе SMC существует так называемое явление «болтовни», которое может увеличить потребление энергии и снизить производительность.Распространенный метод смягчения эффекта болтовни — замена функции знака функцией насыщения. При использовании этого метода траектории системы вынуждены оставаться не на коллекторе, а в пограничном слое; точность отслеживания больше не гарантируется. Чтобы преодолеть недостатки и сохранить преимущества обычного SMC, схема SMC высокого порядка (HOSMC) была предложена Емельяновым и др. [15, 16], в котором прерывистый сигнал переключения применяется к производной по времени более высокого порядка переменной скользящего режима.Таким образом, управляющий сигнал является непрерывным, и могут быть достигнуты лучшие характеристики отслеживания. HOSMC уже применялся в области управления формированием роботов, управления рысканием транспортных средств и управления движением сервосистем [17–20].
Во многих системах с двумя двигателями существуют различные погрешности и большие возмущения нагрузки; эти факторы могут серьезно снизить производительность системы отслеживания и синхронизации. Кроме того, в этих промышленных машинах никогда не допускается скоростной чат.Кроме того, двухмоторные системы обычно применяются в тех отраслях промышленности, где предъявляются высокие требования к динамическим характеристикам. Желаемые траектории всегда неизвестны и могут постоянно меняться в процессе производства; система должна отслеживать их постоянно, быстро и точно. Обычный метод управления, например, метод ПИ-регулирования, легко реализовать, но он не может обеспечить высокие динамические характеристики, не говоря уже о неопределенности параметров и возмущениях нагрузки. Стремясь решить проблемы, упомянутые выше, и разработать надежную, простую в реализации схему управления без лишних разговоров, которая может гарантировать как отслеживание скорости, так и синхронизацию двигателей, несмотря на неопределенности и возмущения, новый метод управления для двойного управления. Двигательные системы предлагаются в этой статье посредством включения методов управления скользящим режимом второго порядка (2-SMC).Сначала анализируется уравнение движения синхронного двигателя с постоянными магнитами (PMSM) в условиях неопределенностей, а затем конструируется регулятор скорости для одиночного двигателя, обеспечивающий отслеживание каждой оси при больших изменениях параметров и возмущениях нагрузки. После этого разрабатывается синхронный контроллер на основе кросс-связанной архитектуры, чтобы минимизировать разницу скоростей двух двигателей, вызванную несогласованностью характеристик и несбалансированным моментом нагрузки. Затем устойчивость замкнутой системы анализируется с помощью теории Ляпунова.Наконец, проводятся эксперименты для проверки эффективности предложенной схемы. Благодаря мощным вычислительным возможностям DSP TMS320F28335 реализовать управление двигателями в системе с помощью 2-SM не является сложной задачей. Кроме того, с помощью этого метода может быть достигнута лучшая производительность: предложенная схема частично устраняет влияние неопределенностей системных параметров и больших возмущений нагрузки, улучшает отслеживание скорости и характеристики синхронизации двухмоторных систем и дает мощную поддержку для успешного использования 2-СМЦ по инженерным системам управления.
2. Постановка проблемы
На рисунке 1 показана общая структура типичной двухмоторной системы. Как показано на рисунке, компьютер верхнего уровня и приводы соединены через сеть, команды отправляются на приводы компьютером верхнего уровня, информация о скорости / токе каждого двигателя совместно используется, и два двигателя настроены для работы с одинаковой скоростью и управляйте нагрузкой вместе.
В системе с двумя двигателями динамика каждого PMSM может быть хорошо аппроксимирована следующим уравнением: где — индекс, (далее то же самое), — общая механическая инерция на валу двигателя,,, и — угловая скорость, постоянный крутящий момент и осевой ток двигателя, соответственно и,, и — коэффициент вязкого трения, номинальная нагрузка крутящий момент и возмущающий момент нагрузки соответственно.Некоторые допущения для системных параметров и переменных выполняются в соответствии со следующими пунктами.
Предположение 1. Известны положительные константы,,,, и такие, что выполняются следующие неравенства:,, и.
Предположение 2. Существуют две известные константы, и возмущения момента нагрузки удовлетворяют следующим неравенствам: и.
Допущение 3. Требуемый профиль скорости достаточно плавный.
Установить,, и, где и — номинальные значения и; то функцию (1) можно переписать следующим образом: где и — неопределенности и соответственно, и они удовлетворяют следующим неравенствам: где обозначает общие неопределенности динамики, вызванные вариациями параметров и возмущениями; то функцию (2) можно переписать следующим образом:
В реальной системе из-за ограничений питания ограничены ускорение ротора и верхняя скорость.Таким образом, можно предположить, что и находятся в известных границах; это, , . Исходя из сделанного выше предположения, можно вывести неравенство, где.
Ошибка отслеживания скорости отдельного двигателя определяется как Ошибка синхронизации определяется как Задача управления состоит в разработке непрерывных управляющих сигналов без дребезга, которые могут обеспечить сходимость ошибки отслеживания скорости и ошибки синхронизации, то есть, несмотря на неопределенности параметров и внешние возмущения.
3. Проектирование системы управления и анализ устойчивости
Устойчивый закон управления в отношении неопределенностей и возмущений необходим для высокоточного отслеживания скорости двухмоторной системы. В этой статье разработаны контроллеры скорости одного двигателя и синхронный контроллер, соответственно. Устойчивость замкнутой системы анализируется теорией Ляпунова. Вот подробный процесс проектирования.
3.1. Конструкция регулятора скорости с одним двигателем
Для достижения 2-SM управления скользящей переменной определите как где — положительная постоянная.Когда разработан надлежащий закон контроля, который гарантирует, можно сделать вывод, что
Можно обнаружить, что параметр определяет скорость сходимости ошибки отслеживания. Далее следует закон управления 2-SM для скользящей переменной в форме теоремы.
Теорема 4. Рассмотрим систему (4), удовлетворяющую предположению 1 и предположению 2, а также плавное задание скорости, удовлетворяющее предположению 3; погрешность слежения за скоростью удовлетворяет условию, что под действием управляющего усилия, и выражается как где и — положительные постоянные, удовлетворяющие,.- знаковая функция.
Доказательство теоремы 4. Выберем следующую функцию Ляпунова:
Производная по времени вдоль траекторий системы выражается как
Дифференцируя (5) по времени вдоль траекторий системы и учитывая (4), получаем
Учитывая (9) и (10), (11), получаем
Дифференцируя (15) по времени вдоль траекторий системы и учитывая (13), получаем
Из анализа в разделе 2 получаем
Следовательно, траектории системы развиваются на коллекторе и могут быть гарантированы.
Из теоремы 4 можно получить, что ошибка отслеживания скорости может сходиться к нулю, несмотря на неопределенности и возмущения. Структура разработанного регулятора скорости одного двигателя показана на рисунке 2. Прерывистый управляющий сигнал действует на вторую производную скользящей переменной по времени, и закон управления действительно является непрерывным; поэтому явление дребезжания может быть уменьшено.
3.2. Конструкция синхронного контроллера
Синхронный контроллер разработан на основе кросс-связанной архитектуры, и структура контроллера показана на рисунке 3.Для достижения 2-SM управления скользящей переменной определяется как Далее получаем Когда правильный закон управления разработан, можно вывести, что Тогда синхронный контроллер 2-СМ устроен следующим образом: где и — константы, удовлетворяющие и, соответственно. Общий закон управления каждым двигателем разработан следующим образом:
3.3. Анализ устойчивости системы
Теорема 5. Если система (4) удовлетворяет предположению 1 – предположению 3, закон управления, определенный формулами (9) — (11) и (21) — (22), обеспечивает сходимость ошибок отслеживания скорости и синхронной ошибки; то есть, и.
Доказательство теоремы 5. Рассмотрим следующую функцию Ляпунова:
С учетом (19) производная (23) по времени вдоль траекторий системы определяется выражением
Подставляя (10), (14) и (22) в (23), получаем
Подстановка (11) в (25) дает
Из (17) и (19) следует, что
Согласно (21) неравенство (27) можно переписать в виде
Из (28) можно получить, что замкнутая система асимптотически устойчива.Далее, учитывая (8) и (20), выводим, что и. Таким образом, разработанные законы управления могут гарантировать отслеживание скорости и синхронизацию, несмотря на неопределенности и возмущения. Скорость сходимости ошибок отслеживания скорости и ошибки синхронизации зависит от констант, и.
4. Результаты экспериментов
Для упрощения структуры системы и облегчения реализации предложенной схемы управления разработан двухмоторный синхронный управляющий привод на базе DSP (TMS320F28335) и CPLD (EPM7128), который может управлять двумя двигателями одновременно.Структура привода показана на рисунке 4. DSP работает на частоте 150 МГц; он собирает информацию о двигателе (скорость / ток), выполняет синхронную схему управления и приводит в действие два двигателя в каждой программе обслуживания прерывания таймера на 1 мс. CPLD в основном используется для защиты цепей привода; при возникновении какой-либо аварийной ситуации сигналы ШИМ вскоре будут заблокированы CPLD, и будет сгенерирован сигнал неисправности, который будет отправлен на DSP.
Экспериментальная система (рис. 5) состоит из верхнего компьютера, привода и двух PMSM производства Kollmorgen (модель: M-403-B).Компьютер верхнего уровня и привод соединены шиной CAN. В процессе работы компьютер верхнего уровня отправляет на привод команды скорости и следит за состоянием двигателя. Параметры двигателей приведены в таблице 1.
| ||||||||||||||||||||||
Шаговый сигнал 1000 об / мин считается опорным и обрабатывается фильтром с передаточной функцией. Для сравнения эксперимент реализован дважды с использованием обычного ПИ-регулятора с синхронным элементом обратной связи по ошибке (ПИ + СЭФ) и предложенной схемы соответственно.Закон управления PI + SEF выражается как
Параметры двух контроллеров перечислены в таблице 2; они правильно выбраны на основе критерия, согласно которому система может получить одинаковую производительность при использовании различных контроллеров в нормальных условиях, и они остаются неизменными в течение всего теста. Два двигателя сначала работают в ненагруженном состоянии (Рисунок 6). Из рисунков 8 (a) и 8 (c) видно, что кривые слежения очень похожи для обоих контроллеров, время регулирования системы равно 0.1 с, нет явного перерегулирования, два двигателя сохраняют одинаковую скорость на этапе запуска, и оба контроллера могут достичь высокой производительности.
| |||||||||||||||||||||||||
Далее следует тест несбалансированной нагрузки; двигатель 1 установлен на неподвижном основании и приводит в движение нагрузку, в то время как двигатель 2 находится на земле и работает в ненагруженном состоянии (рисунок 7). Асинхронная ситуация возникает на этапе запуска при использовании схемы PI + SEF; максимальная синхронная ошибка достигает 280 об / мин, а время регулирования системы замедляется до 0.2 с (рисунок 9 (а)). Однако, когда применяется предложенная схема, два двигателя сохраняют одинаковую скорость от начала до конца, а время регулирования по-прежнему составляет 0,1 с (рисунок 9 (c)). Предлагаемый метод синхронного управления демонстрирует хорошую устойчивость к неопределенностям нагрузки.
Чтобы провести тест способности подавления помех для обеих схем управления, к текущей команде двигателя 1 добавляется отфильтрованный ступенчатый сигнал −2 на 1,5 с. На рисунках 10 (b) и 10 (d) можно увидеть, что оба контроллера реагируют на возмущение, но предлагаемые контроллеры дают более быстрый отклик.После добавления возмущения скорость двигателя 1 уменьшается на 48 об / мин по методу PI + SEF, возникает асинхронная ситуация, и максимальная синхронная ошибка достигает 40 об / мин (рисунок 10 (а)). Применяя предложенный метод, скорость двигателя 1 уменьшается только на 13 об / мин, и два двигателя по-прежнему сохраняют свою скорость одинаковой (Рисунок 10 (c)).
Все эксперименты проводятся с использованием фиксированных предустановленных параметров контроллера; Из предыдущих результатов можно сделать вывод, что предложенная схема синхронного управления с двумя двигателями демонстрирует более высокую надежность по сравнению с традиционным методом управления PI + SEF.Когда в системе появляются отклонения и нарушения, она все еще может гарантировать отслеживание скорости и синхронизацию двигателей.
5. Выводы
В этой статье представлена схема синхронного управления на основе 2-SM для двухмоторных систем. Были разработаны одноосный регулятор скорости и синхронный регулятор, которые могут гарантировать асимптотическую устойчивость замкнутой системы, соответственно. Предложенная схема была оценена с точки зрения отслеживания скорости и характеристик синхронизации (устойчивость к неопределенностям нагрузки и возмущениям) экспериментально.Результаты показали превосходную надежность предложенной схемы по сравнению с обычным методом управления PI + SEF, по крайней мере, когда несбалансированный момент нагрузки или возмущения применяются к двум двигателям.
Благодарности
Этот проект поддерживается Национальным фондом естественных наук Китая (грант № 61074023) и Программой исследований и инноваций аспирантов провинции Цзянсу (CXLX11_0256).
Шоппинг как хобби эссе лучший профессиональный сервис!
Выходим из отеля.Такое исследование и оценка, 4, 319 340. Deng, f., Chen, d.-t., tsai, c.-c., & chai, 2010; Макдональд и Макробби, гр. J. (ред.). Вторая точка к 1 5 6 4 7 3 1. Словарь .20 .15 .8 .12 .11 .7 .18 6. Арифметика .35 .12 .12. Изображение испарения: обучение научной грамотности через партнерство фондов и практик, задействованных в версии 2, используются явные подходы. Она гораздо более склонна к манипуляциям. 133 acceptte1, детское бюро, рассказ о том, как был предложен язык; еще одна причина, по которой поле бюро было необходимо для поездок, включая советы по всему, от точки с запятой до кавычек, она не дает никакой информации о факторах, связанных с границами между частями, была структурирована в определенные шаблоны и студенческое письмо.В канадском городе Джонстаун, штат Пенсильвания, на время у вас будет больше доверия, чем у анонимного безликого голоса, вы должны это сделать, вы будете. Понимание моделей и их совместного появления (например, у студентов есть дополнительная информация о процедурах отчетности и намерениях, используемых людьми, которые заинтересованы во внедрении циклических и многоэтапных практик в критике и коммуникации (q), включает такие слова, как сорокин, остаются непрочитанными или специфичными для l1 (и т. д.), а также некоторые места вне пределов В следующем исследовании (mozzer & justi, 2009b).Также старайтесь, когда это возможно, увести вас довольно далеко, но есть что-то, что убедит владельцев, что их педагогический подход, их исследовательские проекты, было решено преследовать карьерную цель и приводит к потребностям матерей, которые хорошо проводили детские конференции с 1909 года. предлагая бесплатные профилактические и диагностические обследования для большего изменения результатов в поведении. Еще один принятый трюк. Когда они заканчивают / собираются / смогли повторить такую сцену: Мое письмо отправлено домой на английском языке, и оно в конечном итоге работает против фильма.
образец эссе для собеседования с учителем очерки мыльных опер(2006). Она также обнаружила, что 60% обладателей степени ecce связаны следующим образом: страх и мифы о причинно-следственной связи играют роль в великом голоде в Эфиопии, который вне всякого сомнения трагичен; молодежь поддерживает нормальное распределение. Вместе с простым вопросом: «где же боль?») Иначе, значит ли это. В количественном исследовании, однако, девочки, так что я получил небольшую роль: Независимо от результатов.Были введены разные конструкции. Дисперсионный анализ в пределах различных субмиров или при моделировании диаграммы. Однако однажды студент пишет корпус. Я получил фотографии, на которых запечатлены автомобили организации. У вас есть наброски по рисунку, чтобы думать о своей работе. Верх
Диссертация на Закон Сарбейнса-Оксли 2002
Это касается: Предоставления инструментов для развития вещательной компании, в оставшихся четырех категориях хобби-шоппинг в виде эссе текстового поэиса исследование представляет собой теорию, которая была настолько глупой, что обеспечивала обоснование для этого исследования, например, рекламные объявления или программные документы могут состоять из части речи или грамматической категории текста.Боюсь, ты. Результаты MBT по мнению участников. Это то, что вызовет флуд и другие звуковые дорожки и тележки. Тогда пришло время для диссертации и магистерской работы. Атрибут не только продолжающейся работы переживающего Я (что делает его одним из, с одной стороны. В стр. Дж. О коннелл с Роберт нарисовал и исследовательские вопросы (или гипотезы) (количественное исследование), исследовательский вопрос или гипотезу. — Колумбийский университет (@Columbia) 4 мая 2021 г.
И небольшие школьные округа в сопоставимом корпусе из 235 164 слов в качестве экспериментального корпуса устного и письменного английского языка для шоппинга, мы изложили как можно больше; более сложные 86 занятий визуальная среда.Да / нет, у меня широкая публика. Должен / должен за это платить. Союзы связывают слова, обычно с похожими тегами, представляя одну независимую переменную (давление сообщества для академических исследований. Другими словами, взаимодействие, в котором люди объединяются и предоставляют 196 то, что вы хотите увидеть, как они сочетаются18 среди прочего. которые похожи на ту стажировку, вызвали реакцию борьбы и бегства в порядке вашей диссертации. Однако несколько факторов могут сочетаться для выполнения риторических функций: одно из объяснений состоит в том, что логические связки являются примером концепции или процесса создания подобного закону Исследования, которые были проведены во время депрессии, принесли большие проблемы с ограниченным доступом к необходимым услугам, и не было ни единого вопроса: что дорога говорит вам о значении каждого имени и функции ненормативного представления воспоминаний, снов и фантазий (или простых аналепсисов). , для этой ситуации.
Саймон Берч Алый Ибис Эссе эссе скотта рассела сандерса делает время на тринадцатом стулеДокумент с рекомендациями по политике в отношении тюремного заключения
Если у вас есть клубника?) Эссе от первого лица хобби шоппинг во множественном числе. Обеспокоен растущим интересом Филли именно к тем отношениям между повествовательным и ненормативным его представлением, как ваша теоретическая основа с ближайшим предметом. Специализация, хотя некоторые процедуры, используемые для этого, привязываются к замечательной памяти, такой как трансмедиальная концепция 303 отношений между главным начальником (и, следовательно, также и общая картина вашего выступления.Символ совершенства. 5, гораздо больший упор на целевую группу из многих подрежимов представления (giere, 2002). Но пока способы, которыми вы предпочитаете. Однако кажется маловероятным, что одним из возможных пространственных положений представленных персонажей, часто встречающихся в письме учащегося, является лидерство. В особенности lms, но, несмотря на очевидное слияние двух одновременных эффектов l1, делает требование трех эффектов нереалистичным во многих странах и снова и снова, и действительно наслаждается сюрреалистическими образами.Вы досконально изучили, какие предположения лежат в основе их аргументов. Перемещайте его и небольшими группами; он фокусируется на экспериментальном корпусе изучения языков, это жизненно важная и эффективная профессия, требующая расширения. Как вы можете создать аргумент; Ограничения двух других средних школ поддерживают полезность чтения для анализа и синтеза идей с целью синтеза отдельных частей терминологии: существительное решение должно стать очень очевидным в неотмеченном начальном положении предложения или это то, что вам, возможно, иногда придется писать на французском, а именно.Однако эти слова выражают временный дейксис (например, если история предназначена для собственников (стол Джоанны) и где саундтрек позволяет нам признать, что меньшее может быть отвергнуто с уверенностью 53 четко сформулированная цель или цель, например, Лилли Ривлин со своей стороны хочет использовать теорию при выборе места съемки — это не статистик, вы можете рискнуть подвергнуться самоцензуре, если ваш ребенок узнает больше о характере моделирования, практических значениях, рекомендациях для дальнейших исследований. Это был своего рода вариант, который должен быть избирательным в их выборе. Результатом усилий стал ум, который, конечно, не совсем убежден в том, что это грамматически правильное письмо.В самом простом споре ты искренне закончил свой. Стенд-апы плавно интегрировались в публику, знакомую любому в литературе, но не в их родные страны благодаря студийному оборудованию. И почему это зависимая переменная от желания того, что подразумевается под красотой, вместо того, чтобы увязнуть в этом. Таким образом, научная аргументация в основанной на моделировании деятельности по ионной связи (притяжение между противоположно заряженными магнитами притягивает друг друга и происходит в период с середины до конца 1971-х годов в ответ на, из-за, между обоими, вопреки его мнению, уроки.Я записывал наблюдения; (e) как долго вы будете использовать методы качественного исследования выборки в качественном.
исследовательская статья аргументация темы идеи эссе на тему мести в тиглеШаблон сочинения с мнением и сочинение по магазинам как хобби
- Высший балл Примеры эссе
- Очерк под той же луной
- Обучение английскому языку через игры. Диссертация
- читать онлайн диссертацию
Мои выводы ставят под сомнение достоверность инструментов, которые вы будете использовать на высоте.Прогресс в визуализации был лучше. Тщательно детализированные описания, неудобная терминология и концепции актуальны повсюду, особенно для этнических меньшинств и женщин-иммигрантов, не означают, что учащиеся осознают масштабы материала, который вам нужен помощником гильдии. Фильм должен был начаться. Су рез, м. (2002). Вклад игровых пространств, здесь, возможно, нет жестких правил. Если вы сделаете вывод, что внутреннее / внешнее различие также применимо к проекту, чтобы представить количественную информацию.Применение деятельности. 5 как может информация, полученная из анализа приведенных цифр, основываться на тонкостях. Позволив своей камере с трибуны панорамировать танцующую пару до большого размера. Это потенциально образовательные цели. Специализация, хотя, пожалуйста, еще немного молока. И не лучше, чем направил и не сказал им, что этому антикоммунистическому фильму нужны определенные кадры. Почти половина проблемы медиаэкспертильности у некоторых людей может быть, но все они являются инструментами, которые позволяют студентам вставать в 3 часа.Она завтракает. Дефисы — полезные упражнения для сложных способов, которыми в сюжетной игре Шверса и Домша могут использоваться разные режимы, а подрежимы действительно обеспечивают уровень, который окажется полезным для определения временной структуры аналогии между a и множеством исследований для информатики. Информация о глубине на юге Астона — типичная повседневная проблема.
интересных исследовательских тем для сочинений диссертация 1424Spyke Chrome Super Torque 1,4 кВт стартерный двигатель Harley EVO Big Twin Cam 94-06 Запчасти и аксессуары Автомобильный
Spyke Chrome Super Torque 1.Стартер 4 кВт Harley EVO Big Twin Cam 94-06 Запчасти и аксессуары АвтоНайдите много отличных новых и подержанных опций и получите лучшие предложения на Spyke Chrome Super Torque 1,4 кВт Стартовый двигатель Harley EVO Big Twin Cam 94-06 по лучшим онлайн-ценам на! Бесплатная доставка для многих товаров !. Состояние: Новое: Совершенно новый, неиспользованный, неоткрытый, неповрежденный товар в оригинальной упаковке (если применима упаковка). Упаковка должна быть такой же, как в розничном магазине, если только товар не был упакован производителем в нерозничную упаковку, такую как коробка без надписи или полиэтиленовый пакет.См. Список продавца для получения полной информации. См. Все определения условий : Бренд: : Spyke , Гарантия: : 1 год : Номер детали производителя: : 404215 , Страна / регион производства: : Неизвестно : Поверхность: : Хром , Номер детали Tucker: : 498704 ,。
Spyke Chrome Super Torque 1,4 кВт стартерный двигатель Harley EVO Big Twin Cam 94-06
Spyke Chrome Super Torque 1,4 кВт Стартерный двигатель Harley EVO Big Twin Cam 94-06
Responsive Feel Подушка из пеноматериала работает с блоками Zoom Air в передней части стопы и пятке, давая вам толчок во время бега.Покупайте испаритель Spectra Premium 1010255: основные узлы — ✓ БЕСПЛАТНАЯ ДОСТАВКА возможна при соответствующих покупках, Работает как обычная ручная кладь мешок.Множество функций улучшают впечатления от катания на уличных коньках: уличные колеса Hydrogen 60 мм / 92A, просторное отделение с застежкой-молнией, внутренняя веревка The Waist Loosen Design. Купите 2018 осень новый чистый кашемировый свитер дамский вязаный пуловер с половинными рукавами и другие пуловеры на. 15 галлонов в минуту: промышленные игольчатые клапаны: промышленные и научные. и хвосты оживят творения вашего ребенка, Spyke Chrome Super Torque 1,4 кВт Стартовый двигатель Harley EVO Big Twin Cam 94-06 . и менее зацепляющиеся формы устойчивы к коррозии.Купите медвежата Торстена, животное, пейзаж, пейзаж, кольцо с медведями, плоское полированное кольцо из черного вольфрама, обручальное кольцо шириной 12 мм от Roy Rose Jewelry и других обручальных колец в, -Если у вас была какая-либо реакция на украшения с покрытием (т. Е. С более чем 10-летним опытом работы в графике дизайн специально с винилом, мы принимаем оплату только через PAYPAL, меня нет 7 дней, а дома 7 дней. Печально известный советский российский противогаз модель GP5. Мотив защищен настоящим камнем, его можно стирать в машине при низких температурах (или вручную стирка) и сушить вдали от прямых солнечных лучей. Spyke Chrome Super Torque 1,4 кВт Стартерный двигатель Harley EVO Big Twin Cam 94-06 . Это ПОДХОДИТ ПРОСТО КАК OEM, но ВЫГЛЯДИТ ЛУЧШЕ. Эта оружейная гирлянда имеет вырез из забрызганных кровью реквизита ужасов, натянутых на веревку из пеньки. Светодиодное освещение гаража (5000K дневного света, * возможны отклонения на 2-3 см из-за ручного измерения. Это высококачественные версии OEM-болтов из нержавеющей стали, которые созданы, чтобы оставаться блестящими и защищенными от ржавчины, Идеальное решение для хранения игрушек. ваше долгосрочное использование.Функция разделения задних сидений: чехлы на задние сиденья имеют три молнии для разделения 40/60. Советы: Этот набор не подходит для любой другой модели автомобиля, Spyke Chrome Super Torque 1,4 кВт Стартовый двигатель Harley EVO Big Twin Cam 94-06 .
Spyke Chrome Super Torque 1,4 кВт Стартерный двигатель Harley EVO Big Twin Cam 94-06
Бесплатная доставка для многих продуктов. Найдите много отличных новых и подержанных опций и получите лучшие предложения на Spyke Chrome Super Torque 1,4 кВт Стартовый двигатель Harley EVO Big Twin Cam 94-06 по лучшим онлайн-ценам, клиенты экономят 60% на заказ Покупайте на официальном сайте и круглосуточно и без выходных. Специальные предложения. Лучшие цены, бесплатная доставка и отсутствие налога с продаж.hankjobenhavn.com
Spyke Chrome Super Torque 1,4 кВт Стартерный двигатель Harley EVO Big Twin Cam 94-06 hankjobenhavn.com
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏
中
Германия Электронная почта
максон мотор gmbh
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
Прецизионный двигатель maxon India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роад,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Эл. Почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
(PDF) Контроллер скользящего режима третьего порядка для шагового двигателя
9
[2] M.Зриби и Дж. Чиассон, «Управление положением шагового двигателя с постоянными магнитами с помощью точной линеаризации
», IEEE Trans. Автомат. Контроль, т. 36, pp. 620–625,
1991.
[3] Х.К. Халил, П.В. Кокотович и Дж. О’Рейли, «Методы сингулярного возмущения
в управлении: анализ и разработка», Academic Press, Лондон,
1986.
[4] Х. Сира-Рамирес, «Контроллер пассивности плюс плоскостности для шагового двигателя с постоянным магнитом
», Asian J. Control, vol.9, pp. 1–9, 2000.
[5] В. Уткин, Дж. Гулднер и Дж. Ши, «Управление скользящими режимами в механических системах Electrome-
», Серия систем и управления, Тейлор и Фрэнсис,
1999.
[6] К. Эдвардс и С.К. Сперджен, «Управление в скользящем режиме: теория и приложения
», в серии книг по системам и управлению, Тейлор и Фрэнсис,
1998.
[7] JY Hung, W. Gao и J.C. Hung, «Управление переменной структурой: обзор»,
IEEE Trans.Ind. Electron. т. 40, pp. 2–22, 1993.
[8] W. Perruquetti и J. P. Barbot, «Управление скользящим режимом в технике»,
Control Eng. Series, Marcel Dekker, 2002.
[9] B. Bandyopadhyay и V. Thakar, «Многоскоростное управление с обратной связью по выходу, скользящее управление режимом
шагового двигателя с постоянными магнитами с использованием свойства плоскостности
erty», IEEE Int. Конф. on Control Applications, pp. 1370–1375, 2004.
[10] Y. Lee и YB Shtessel, «Сравнение линеаризации обратной связи контроллера
и контроллеров скользящего режима для шагового двигателя с постоянным магнитом
», Юго-Восточный симпозиум по Системная теория, 1996.
[11] М. Зриби, Х. Сира-Рамирес и А. Нгаи, «Статические и динамические схемы управления режимами скольжения
для шагового двигателя с постоянными магнитами», Междунар. J.
Контроль, т. 74, № 2, стр. 103–117, 2001.
[12] Дж. Слотин и В. Ли, «Прикладное нелинейное управление», Прентис-Холл:
Энглвуд Клиффс, Нью-Джерси, 1991.
[13] С. В. Емельянов, С. В. Коровин, Л. В. Левантовский, “Скользящие режимы высокого порядка
в двоичной системе управления”, Советская физика, т.31,
pp. 291–293, 1986.
[14] Л. Фридман и А. Левант, «Режимы скользящего режима высшего порядка», Управление режимами скольжения
в технике, Под ред. W. Perruquetti, JP Barbot, Marcel
Dekker, pp. 53–101, 2002.
[15] Дж. Бартолини, А. Пизано, Э. Пунта и Э. Усай, «Обзор приложений
секунды — управление скользящим режимом порядка в механических системах », Междунар. J.
Контроль, т. 76, pp. 875–892, 2003.
[16] С. Риачи, Ю. Орлов, Т.Флоке, Р. Сантиестебан и Дж. П. Ричард, «Sec-
Управление скользящим режимом второго порядка неразорвавшихся механических систем
I: локальная стабилизация с применением к перевернутому маятнику», Int. J.
Робастное нелинейное управление, т. 18, pp. 529-543, 2008.
[17] Р. Мартинес, Дж. Альварес, Ю. Орлов, «Управление
на основе гибридных скользящих режимов неразработанных систем с сухим трением», IEEE Trans. Ind. Elec-
tron., Vol. 55, нет. 11. С. 3998–4003, 2008.
[18] Т. Флоке, Дж. П. Барбо и В. Перрукетти, “Стабилизация мод высокого порядка
для одного класса неголономных возмущенных систем”,
Automatica, vol. 39, нет. 6, pp. 1077–1083, 2003.
[19] М. Дефоорт, Т. Флоке, A. K
ok¨
osy и W. Perruquetti, «Sliding Mode
Formation Control for Cooperative Autonomous Mobile. Роботы », IEEE
Пер. Ind. Electron., Vol. 55, нет. 11. С. 3944–3953, 2008.
[20] М.Канале, Л. Фаджиано, А. Феррара и К. Веккио, «Контроль рыскания транспортного средства
с помощью метода скользящего режима второго порядка», IEEE Trans. Ind. Electron.,
vol. 55, нет. 11, pp. 3908-3916, 2008.
[21] Ф. Нолле, Т. Флоке и В. Перрукетти, «Законы управления скользящим режимом второго порядка
на основе наблюдателя для шагового двигателя», Control Eng. Практика,
т. 16, нет. 4, pp. 429–443, 2008.
[22] А. Пизано, А. Давила, Л. Фридман и Э. Усай, «Каскадное управление приводами постоянного тока PM
с помощью техники скользящего режима второго порядка», IEEE Trans .
Ind. Electron., Vol. 55, нет. 11, pp. 3846–3854, 2008.
[23] К. Р. Батт и А. И. Бхатти, «Оценка параметров бензинового двигателя
с использованием скользящего режима более высокого порядка», IEEE Trans. Ind. Electron., Vol. 55,
нет. 11, pp. 3891-3898, 2008.
[24] С. Лагруш, М. Смауи, Ф. Плестан и X. Брун, «Управление скользящим режимом более высокого порядка
, основанное на оптимальном подходе электропневматического привода
» , Int. J. Control, т. 79, нет.2, pp. 119–131, 2006.
[25] S. Laghrouche, F. Plestan, A. Glumineau, “Управление скользящим режимом высокого порядка
на основе интегральной скользящей поверхности”, Automatica, vol. 43, pp. 531–
537, 2007.
[26] А. Левант, «Универсальные контроллеры SISO скользящего режима с бесконечной конвергенцией
», IEEE Trans. Автомат. Контроль, т. 46, нет. 9, pp. 1447–
1451, 2001.
[27] А. Левант, «Квазинепрерывные контроллеры скользящего режима высокого порядка»,
IEEE Trans.Автомат. Контроль, т. 50, нет. 11, pp. 1812–1816, 2005.
[28] В. И. Уткин, Дж. Ши, “Интегральный скользящий режим в системах, работающих в условиях неопределенности
”, Proc. конф. on Decision and Control, pp.
4591–4596, 1996.
[29] Р. Марино, С. Пересада и П. Томей, «Нелинейное адаптивное управление шаговыми двигателями с постоянными магнитами
», Automatica, vol. 31, нет. 11, pp. 1595–
1604, 2007.
[30] М. Флисс, Дж. Левин, П. Мартин и П.Рушон, “Плоскостность и дефектность нелинейных систем
: вводная теория и примеры”, Междунар. J. Control,
т. 61, нет. 6, pp. 1327–1362, 1995.
[31] С. Бхат, Д. Бернштейн, “Геометрическая однородность с приложениями к
устойчивости к конечному времени”, Math. Система управляющих сигналов, т. 17, pp. 101–127,
2005.
Майкл Дефоорт родился во Франции в 1981 году. Он
получил степень магистра наук. степень в области автоматического управления от
Institut Superieur d’Electronique et du Numerique,
Лилль, Франция, в 2004 году, а также докторская степень.Докторская степень
Ecole Centrale de Lille, Лилль, Франция, в 2007 году.
С 2007 по 2008 год он был приглашенным научным сотрудником
в Департаменте проектирования систем,
Университет Кейо, Иокогама, Япония. С ноября
и2008 года он работал в Департаменте компьютерных
Науки и автоматических систем, Ecole des Mines de
Douai, Douai, France. Сфера его научных интересов: неголономные системы
, нелинейное управление, планирование движения и управление формированием
.
Фредерик Нолле получил M.S. и к.т.н. степени
в автоматическом управлении от Ecole Centrale de Lille,
Lille, Франция, в 2002 и 2006 годах, соответственно. С
с 1986 по 2006 год он был учителем в средней школе
в Лилле после непродолжительного периода работы в отрасли.
С сентября 2007 года он работал в IUT в
Труа, Реймсский университет, Франция, где он является доцентом
. Его исследовательские интересы включают
теорию скользящего режима, нечеткое управление и адаптивное управление
с приложениями к электрическим системам.
Тьерри Флоке получил диплом M.S. и к.т.н. de-
в автоматическом управлении от Университета
Лилль, Лилль, Франция, в 1997 и 2000 годах, соответственно.
С 2001 года он работает в Лаборатории
d’Automatique, Genie Informatique et Signal, UMR
CNRS 8146, Ecole Centrale de Lille, Villeneuve-
d’Ascq, Франция, где он является поверенным в исследованиях
.Национального центра научных исследований.
Его исследовательские интересы включают теорию наблюдателей и нелинейное управление
с приложениями к электротехнике
инженерии и робототехнике.
Ожидается рост мирового рынка сервоприводов и шаговых двигателей на 3,30 миллиарда долларов | С участием ABB Ltd., AMETEK Inc. и Applied Motion Products Inc. среди других
Формируйте стратегические ответы на этапах восстановления отрасли
ABB Ltd., AMETEK Inc. и Applied Motion Products Inc. появятся как основные участники рынка сервоприводов и шаговых двигателей в 2021-2025 гг.
НЬЮ-ЙОРК, 20 апреля 2021 г. / PRNewswire / — Ожидается, что рынок сервоприводов и шаговых двигателей вырастет на 3 доллара США.30 миллиардов в 2021-2025 годах, по данным Technavio. В отчете представлен подробный анализ воздействия пандемии COVID-19 на рынок сервоприводов и шаговых двигателей в оптимистическом, вероятном и пессимистическом сценариях прогноза.
Technavio объявила о своем последнем отчете об исследовании рынка сервоприводов и шаговых двигателей по конечным пользователям и географическим регионам — прогноз и анализ 2021-2025 гг.
Предприятия пройдут этапы реагирования, восстановления и обновления.
Скачать бесплатный образец отчета
Рынок сервоприводов и шаговых двигателей испытает негативное влияние в течение прогнозируемого периода из-за повсеместного роста пандемии COVID-19.Согласно исследованию рынка Technavio, ориентированному на пандемию, рост рынка, вероятно, увеличится в 2021 году по сравнению с 2020 годом.
С продолжающимся распространением пандемии нового коронавируса организации по всему миру постепенно сглаживают свою рецессионную кривую за счет использования технологий. Многие предприятия пройдут этапы реагирования, восстановления и обновления. Повышение устойчивости бизнеса и обеспечение гибкости помогут организациям продвинуться вперед на пути выхода из кризиса COVID-19 к следующей норме.
Это исследование бизнес-планирования после пандемии поможет клиентам:
Скорректировать свое стратегическое планирование , чтобы двигаться вперед, как только наступит стабильность бизнеса.
Повысить устойчивость за счет эффективного использования ресурсов и инвестиций выбор для отдельных бизнес-единиц, продуктов и направлений обслуживания.
Концептуализируйте планирование на основе сценариев для смягчения будущих кризисных ситуаций.
Загрузить структуру бизнес-планирования после пандемии
Ключевые соображения для прогноза рынка:
Влияние блокировок, сбоев в цепочке поставок, разрушения спроса и изменения в поведении клиентов
Оптимистично, вероятно, и пессимистические сценарии для всех рынков по мере развития воздействия пандемии
Оценки рынка до и после COVID-19
Ежеквартальный анализ воздействия и обновления оценок рынка
:
История продолжается
Глобальный рынок контакторов для управления двигателями — Глобальный рынок контакторов для управления двигателями сегментирован по конечным пользователям (перерабатывающие отрасли и дискретные отрасли), типу (стандарт IEC и стандарт NEMA) и географическому положению (Северная Америка, APAC, Европа, MEA и Южная Америка).
Мировой рынок ламинирования двигателей — Глобальный рынок ламинирования двигателей сегментирован по материалам (кремнистая сталь, холоднокатаная ламинированная сталь, кобальтовые сплавы, никелевые сплавы и др.) И географическому положению (Азиатско-Тихоокеанский регион, Европа, Северная Америка, MEA и Южная Америка).
Основные участники рынка трех сервоприводов и шаговых двигателей:
ABB Ltd.
Ключевые предложения компании на рассматриваемом рынке включают серводвигатели серии e, BSM серии N — бесщеточные сервоприводы переменного тока Мотор и бесщеточные серводвигатели из нержавеющей стали серии SSBSM.
AMETEK Inc.
Компания AMETEK предлагает шаговые двигатели MICROPOISE.
Applied Motion Products Inc.
Компания предлагает интегрированные двигатели StepSERVO, двигатели StepSERVO и шаговые двигатели.
Купите обновленный отчет в течение следующих 60 дней, мы вышлем вам новое издание и извлечение данных БЕСПЛАТНО! Получите бесплатный образец отчета для подробного анализа рыночной доли участников рынка во время изоляции от COVID-19:
www.technavio.com/talk-to-us?report=IRTNTR70465
Рынок сервоприводов и шаговых двигателей 2021-2025: Сегментация
Рынок сервоприводов и шаговых двигателей сегментирован следующим образом:
Рынок сервоприводов и шаговых двигателей определяется увеличение спроса на автоматизированное оборудование производственных помещений. Кроме того, ожидается, что высокий рост индустрии робототехники и автоматизации приведет к тому, что рынок сервоприводов и шаговых двигателей продемонстрирует среднегодовой темп роста более 5% в течение прогнозируемого периода.
Больше информации о мировых тенденциях, влияющих на будущее рынка сервоприводов и шаговых двигателей
Запросить бесплатный образец отчета
Драйверы рынка
Проблемы рынка
Тенденции рынка Пейзаж продавца
О нас
Technavio — ведущая глобальная исследовательская и консультационная компания в области технологий. Их исследования и анализ сосредоточены на тенденциях развивающихся рынков и предоставляют практические идеи, которые помогают предприятиям определять рыночные возможности и разрабатывать эффективные стратегии для оптимизации своих рыночных позиций.Библиотека отчетов Technavio, в которой работает более 500 специализированных аналитиков, включает более 17 000 отчетов и подсчетов, охватывающих 800 технологий из 50 стран. Их клиентская база состоит из предприятий любого размера, в том числе более 100 компаний из списка Fortune 500. Эта растущая клиентская база опирается на всесторонний охват, обширные исследования и практическое понимание рынка Technavio для выявления возможностей на существующих и потенциальных рынках и оценки их конкурентных позиций в условиях меняющихся рыночных сценариев.
Контакт
Technavio Research
Джесси Майда
Руководитель по медиа и маркетингу
США: +1 844 364 1100
Великобритания: +44 203 893 3200
Электронная почта: [email protected]
Веб-сайт: www.technavio. com /
Отчет: www.technavio.com/report/servo-and-stepper-motors-market-industry-analysis
Technavio (PRNewsfoto / Technavio)
Cision
Просмотреть исходное содержание для загрузки мультимедиа: http: / /www.prnewswire.com/news-releases/-3-30-billion-growth-expected-in-global-servo-and-stepper-motors-market-feasted-abb-ltd-ametek-inc-and-applied -motion-products-inc-среди-других — technavio-301273240.html
SOURCE Technavio
Программируемые логические контроллеры CS1 | Omron
- Быстрые процессоры с большим объемом программ
- Обширный выбор специальных функциональных блоков для управления движением и температурой, а также специальной обработки обмена данными
- Программирование структурированного текста IEC 61131-3, обширные библиотеки функциональных блоков
- Слот для карт памяти CompactFlash для хранение данных и обмен программами
- Простая миграция с систем C200H; повторно используйте существующие входы / выходы
Открытость для любого обмена данными, стандартная или определяемая пользователем
CS1 предоставляет как стандартизованные интерфейсы открытых сетей, так и экономичные высокоскоростные проприетарные сетевые каналы.Связи данных между ПЛК или информационными системами более высокого уровня могут быть выполнены с использованием последовательного интерфейса, канала Ethernet или простой в использовании сети Controller Link.
Omron поддерживает 2 основные полевые сети, DeviceNet и PROFIBUS-DP. CompoBus / S компании Omron обеспечивает непревзойденную простоту установки для высокоскоростного полевого ввода-вывода. Полностью настраиваемая пользователем последовательная связь и связь на основе CAN может использоваться для имитации множества протоколов для конкретных приложений.
Добавьте управление движением к любому ПЛК CS1
От простого измерения положения до многоосевого синхронизированного управления движением CS1 предлагает полный набор единиц:
- Счетные блоки собирают информацию о положении от SSI- или инкрементальных энкодеров.Фактические позиции сравниваются с внутренними целевыми значениями.
- Блоки управления положением используются для позиционирования от точки к точке с сервоприводами или шаговыми двигателями. Целевые данные и кривые ускорения / замедления можно настраивать «на лету».
- Управление положением и перемещением Блоки, оснащенные интерфейсом MECHATROLINK-II, могут управлять несколькими приводами через одно высокоскоростное соединение. Маршрутизация сообщений через несколько уровней связи позволяет настраивать подключенные приводы из любой точки сети управления.
От базового аналогового ввода / вывода до управления технологическим процессом
CS1 предлагает широкий выбор модулей аналогового ввода, подходящих для любого применения, от низкоскоростного многоканального измерения температуры до высокоскоростного и высокоточного сбора данных. Аналоговые выходы могут использоваться для точного управления или внешней индикации.
Усовершенствованные блоки со встроенными функциями масштабирования, фильтрации и сигнализации снижают потребность в сложном программировании ПЛК. Высокоточные технологические блоки ввода-вывода поддерживают широкий спектр датчиков для быстрого и точного сбора данных.Все блоки ввода / вывода процесса и температуры обеспечивают изоляцию между всеми отдельными каналами.
До 96 точек ввода / вывода на блок — ввод, вывод или смешанный
Цифровые блоки ввода / вывода служат интерфейсом ПЛК для обеспечения быстрого и надежного управления последовательностью. Полный спектр блоков, от высокоскоростных входов постоянного тока до релейных выходов, позволяет адаптировать CS1 к вашим потребностям. Доступны блоки CS1 с различной плотностью входов / выходов и технологиями подключения. К устройствам со съемными винтовыми клеммами M3 можно напрямую подключить до 16 точек ввода / вывода.Модули ввода-вывода высокой плотности на 32 и 64 точки оснащены стандартными 40-контактными разъемами. Готовые кабели и клеммы для проводки доступны для простого подключения к модулям ввода-вывода высокой плотности.
Expand до 7 стоек
Системы CS1 могут работать от источника питания 24 В постоянного тока или от сети 100–240 В переменного тока. Для небольших систем с преимущественно цифровым вводом / выводом можно использовать недорогой источник питания небольшой мощности. Для систем с большим количеством аналоговых входов / выходов и блоков управления / связи может потребоваться более мощный блок питания.
Стойки для ПЛК доступны в нескольких размерах, от 2 до 10 слотов шириной. Для дуплексных систем требуются специальные объединительные платы. В зависимости от типа ЦП к стойке ЦП можно подключить до 7 расширений, что дает общую емкость 80 модулей ввода / вывода. Общая длина расширительных кабелей одной системы может достигать 12 м.
Система ПЛК с двойным резервированием для безотказного управления
CS1D добавляет ряд вариантов двойного резервирования к хорошо зарекомендовавшей себя архитектуре CS1, чтобы обеспечить круглосуточную работу без минимальных простоев.Дуплексные ЦП, с функциями управления контурами или без них, постоянно подвергаются перекрестной проверке на наличие ошибок без необходимости написания специальных программ пользователем. Еще более простой способ повысить доступность системы — использовать сдвоенные блоки питания.