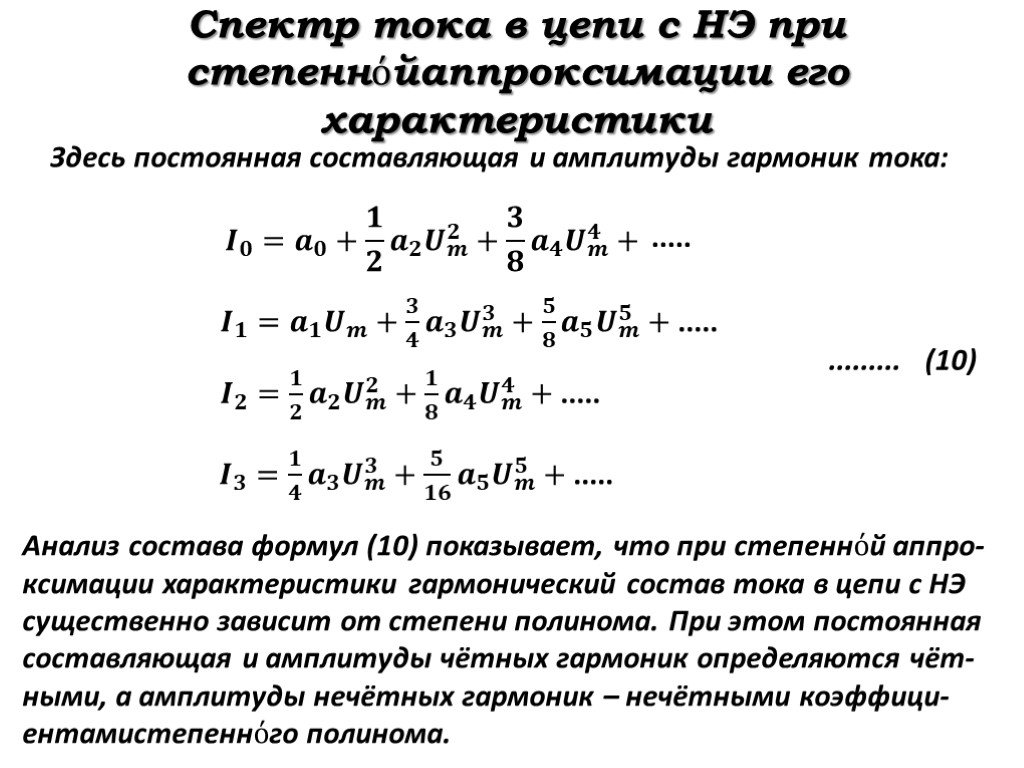
Постоянная составляющая в сигнале переменного тока
По определению постоянная составляющая (среднее значение) равна сумме площади положительной и отрицательной части импульса напряжения или тока деленная на период следования импульсов,
U0 = (S+ + S—) /Tи.
Рассмотрим два синусоидальных сигнала, изображенных на рис. 2.8. Левый сигнал не имеет постоянной составляющей, так как его положительный пик равен отрицательному. Правый же сигнал содержит составляющую постоянного тока величиной 5 В.
Рис.2.8
Постоянная составляющая переменного тока называется также средним, или усредненным, значением сигнала переменного тока. Определим постоянную составляющую сигнала, имеющего прямоугольную форму (Рис.2.9):
Рис.2.9
определим положение нулевого уровня;
вычислим площадь лежащую выше нулевого уровня
S+ = U+ ×t+ = 4 × 1 = 4;
вычислим площадь лежащую ниже нулевого уровня
S— = U— ×t— = -1×2 = -2;
вычислим суммарную площадь
S+ + S— = 4+(- 2) = 2;
вычислим среднее значение напряжения за период равно
(S+ + S— )/ T = (S+ + S
Среднеквадратическое значение (действующее) переменного тока
Постоянный ток имеет постоянное значение, и это значение можно использовать во всех вычислениях. Значение же переменного тока изменяется во времени. Чтобы преодолеть эту трудность, за «постоянное» значение переменного тока приняли и используют его среднеквадратическое значение. Среднеквадратическое значение переменного тока является эквивалентом значения постоянного тока, при котором вырабатывается такая же мощность, что и при исходном значении переменного тока. Если известно среднеквадратическое значение переменного тока, то его можно использовать для вычисления мощности так же, как если бы это было постоянное напряжение или ток.
Например:
мощность пост, тока = Постоянный ток х Постоянное напряжение;
мощность переменного, тока = Среднеквадратическое значение тока х
х
среднеквадратическое значение напряжения.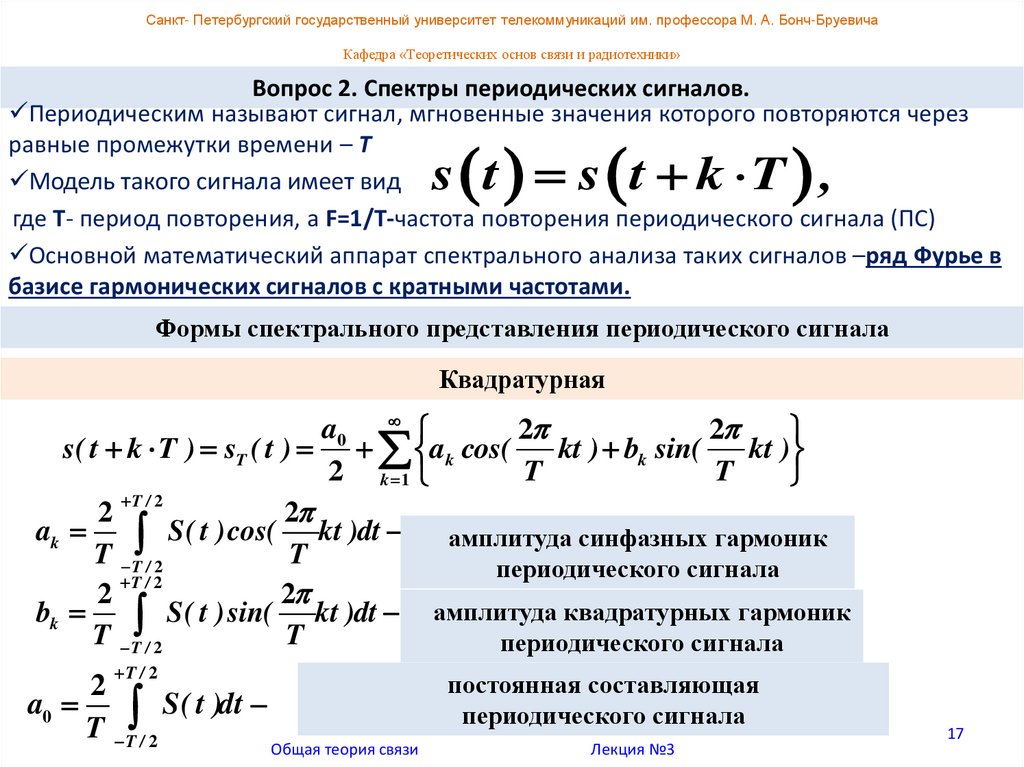
Значения переменного тока и напряжения всегда задают в виде среднеквадратической величины, за исключением специально оговоренных случаев.
Пример 1
Решение:
Домашние обогреватели работают от сетевого напряжения, имеющего среднеквадратическое значение 220 В. Мощность, потребляемая обогревателем, составляет 1 кВт = 1000 Вт. Из формулы
Р = U2/R
определяем
R = U2/P = 2402/1000 = 57,6 Ом.
Соотношение между пиковыми и среднеквадратическими значениями
Действующее значение тока Iд – это среднеквадратичное значение за период переменного тока.
Iд = √ (i²) ср = √ Sср
где
Т период частоты сигнала.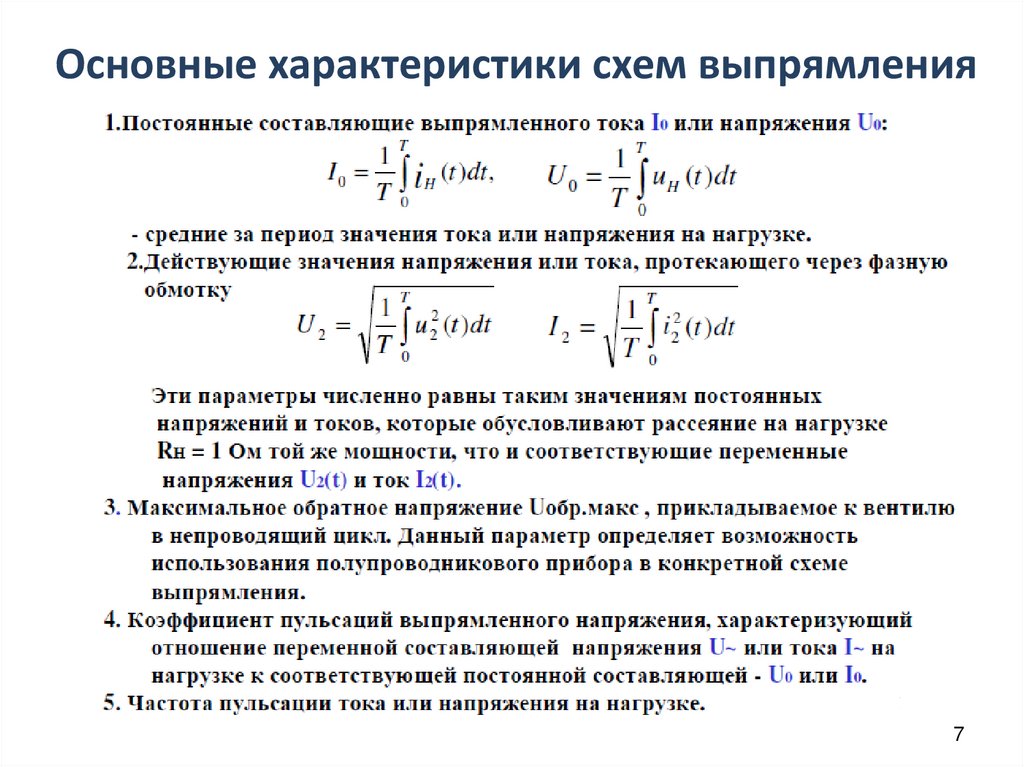
Действующее значение переменного тока выбрано в качестве главной характеристики на том основании, что действие электрического тока в ряде случаев пропорционально квадрату тока или напряжения, например, тепловое действие, механическое взаимодействие прямого и обратного провода, взаимодействие заряженных пластин и т.д. Для косинусоидального тока квадрат площади за период равен,
S² = 0∫ТI²m cos² ωt dωt = I²m π.
Среднеквадратическое значениями значение косинусоидального тока равно,
Iср.кв. = √ I²mπ /2π × = Im/√2 = 0,707Im.
Среднеквадратическое
значение сигнала переменного тока
зависит от его формы. Так, среднеквадратическое
значение синусоидального сигнала
составляет 0,707 его пикового значения
(амплитуды). Это справедливо только для
синусоидального сигнала. Например, если
амплитуда синусоидального сигнала U=
= 10 В, то его среднеквадратическое
значение составит Iср.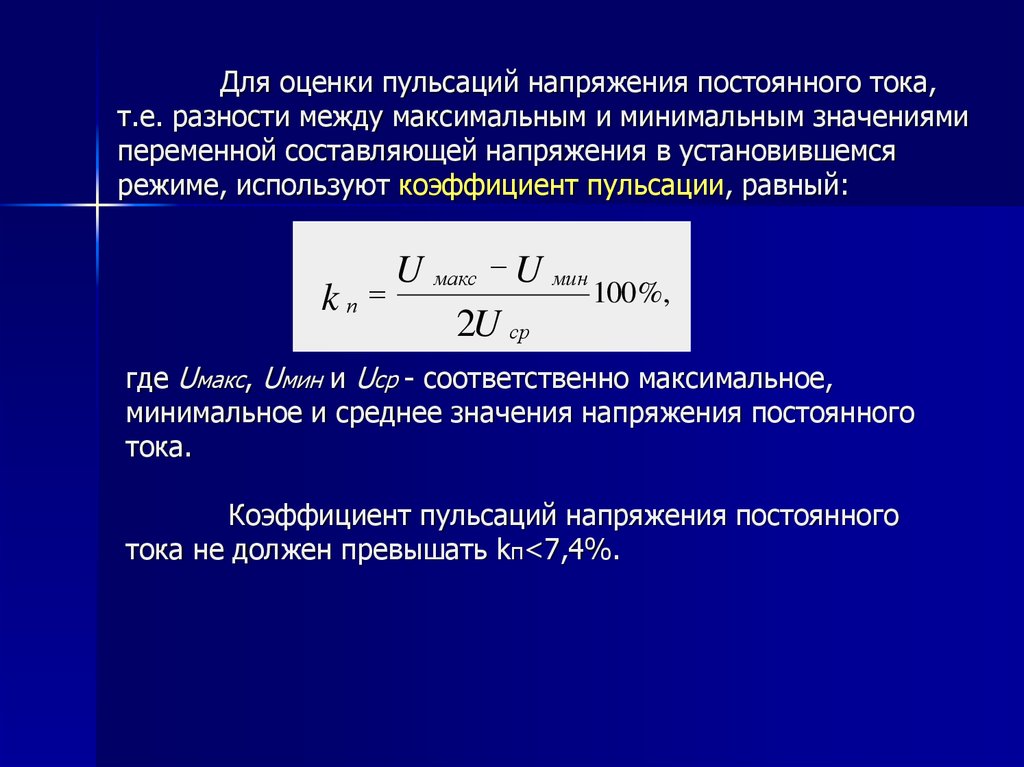 кв =
0,707 × Um
кв =
0,707 × Um
Рис.2.10
Датчики-реле контроля пламени оптические инфракрасные (инфракрасный диапазон постоянная составляющая) ДМС-100М, ДМС-100М-ПФ, ДПФ-А, ДПФ-А2
НАЗНАЧЕНИЕ
Датчики контроля пламени оптические ДМС-100М предназначены для селективного контроля пламени горелок, работающих на жидком топливе.
Датчики потускнения факела ДМС-100М-ПФ, ДПФ-А, ДПФ-А2 предназначены для регистрации потускнения пламени горелок, работающих на пылеугольном топливе или других видах топлива (например, на обводненном мазуте и т.д.).
Датчики ДМС-100М и ДМС-100М-ПФ обеспечивают:
— выдачу сигнала (контакты реле, аналоговый выход 0…5В или 4…20мА) для систем автоматики промышленного энергетического оборудования;
 ..1040 нм;
..1040 нм;— отображение уровня излучения на аналоговом индикаторе;
— контроль исправности цепи подключения фотоприемника на обрыв и короткое замыкание;
— контроль правильности подключения фотоприемника.
ОСНОВНЫЕ МОДИФИКАЦИИ
|
ДМС-100М/24 ДМС-100М/220 |
ДМС-100М-ПФ/24 ДМС-100М-ПФ/220 |
ДПФ-А |
ДПФ-А2 |
||||
|
|
|
|
|
||||
|
|
|
|
|||||
|
|
|
|
|||||
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
| Параметр | Значение |
Напряжение питания:— ДМС-100М/24, ДМС-100М-ПФ/24— ДМС-100М/220, ДМС-100М-ПФ/220, ДПФ-А, ДПФ-А2 |
= 24+10%/-15% В, ~ 18+10%/-15% В* ~ 220+10%/-15% В, 50 Гц |
Потребляемая мощность:— ДМС-100М, ДМС-100М-ПФ,— ДПФ-А,— ДПФ-А2 |
не более 7,0 Вт, не более 15,0 Вт |
Выходной сигнал:— дискретный,— аналоговый |
переключающиеся контакты реле 0.  ..5 В или 4…20 мА ..5 В или 4…20 мА |
Коммутируемое напряжение, ток |
не более 220 В, 1 А |
Коммутируемая мощность |
не более 100 Вт, 70 ВА |
Время срабатывания |
не более 2 с |
Исполнение по ГОСТ 14254:— электронный блок — модуль фотоприемника в корпусе охлаждения |
IP40 IP65 |
Температура окружающей среды:— в месте установки электронного блока,— в месте установки выносного фотоприемника |
от -40°С до +50°С от -40°С до +70°С |
Присоединительный размер |
труба 45х2 |
Вес:— ДМС-100М, ДМС-100М-ПФ,— ДПФ-А,— ДПФ-А2 |
1,5 кг 2,5 кг 3,5 кг |
* — при питании датчиков переменным током от сетевых трансформаторов необходимо учитывать завышение напряжения трансформатора на холостом ходу.
ПРИМЕР ЗАКАЗА
Оптический датчик-реле контроля пламени ДМС-100.
Оптический датчик потускнения факела ДПФ-А.
Как добавить файл констант в ваш проект React | by Austin Paley
Поскольку последние несколько недель я создавал проекты React, я начал переходить от написания кода, который просто работает, к тому, чтобы сосредоточиться на том, как я могу сделать структуру своего проекта максимально чистой и понятной. возможное.
Помимо базовых вещей, таких как как можно более четкое наименование переменных, я недавно сделал для очистки каждого компонента то, что перенес все мои константы в их собственный раздел проекта.
Зачем беспокоиться?
Давайте просто посмотрим, как выглядел один из моих элементов до моих изменений:
… по сравнению с сейчас:
Я думаю, нельзя сказать, что вариант № 2 намного легче читать и что код, который присутствует позволяет пользователям, которые пытаются понять, что происходит, сосредоточиться на том, что на самом деле делается в течение жизненного цикла этого конкретного компонента, вместо того, чтобы пытаться понять определенные константы.
Установка здесь очень проста. Для начала я создал новую папку в src/ под названием «constants», чтобы хранить все константы, которые я использую во всех своих компонентах. В этой папке я просто создаю файл /src/constants/index.js для хранения всех своих компонентов, а затем заранее добавляю каждый из них с «экспортом», чтобы каждую константу можно было импортировать в другое место, например:0003
export const DJISYMBOL = "&symbol=DJI"
Затем для собственного здравомыслия я посмотрю и посмотрю, какие константы я использовал несколько раз в своем проекте. Нет причин определять их дважды, и поэтому я могу значительно сократить свой код при масштабировании, определяя их только один раз здесь.
После того, как я получил все свои константы, однозначно определенные в index.js, я продолжаю и разбиваю каждую группу констант дальше, чтобы я мог четко понять, какой компонент использует какой компонент. Это, очевидно, создает некоторые незначительные проблемы, когда дело доходит до разъяснения того, когда компонент используется дважды, но довольно легко просто добавить небольшое примечание, чтобы уточнить это.
Вот что у меня есть на данный момент:
Вы сразу заметите, что в приведенном выше случае у меня на самом деле есть две константы с одинаковым значением, но с разными именами. Я сделал это, потому что я чувствовал, что когда я вызываю «Constant.NEWACCOUNTURL» на своей странице регистрации, это было понятнее при создании новой учетной записи, а не «Constant.EXISTINGACCOUNTURL», когда контекстуально мы фактически создаем новую учетную запись.
Еще один способ решить эту проблему — написать что-то вроде:
импортировать {EXISTINGACCOUNTURL as NEWACCOUNTURL} из './constants' … чтобы создать псевдоним для вашей первой константы при ее импорте. Каждому свое, но на самом деле я предпочитаю импортировать все мои константы за один раз, например:
import * as Константы из './constants'
… это может быть немного менее эффективно, так как импортирует некоторые константы Возможно, я не буду использовать в компоненте, но мне нравится, когда мой код читается как Constants. [CONSTANTNAME] в моем компоненте, чтобы было ясно, откуда я беру свои константы, если пользователь пропустит мой импорт в верхней части файла компонента. .
[CONSTANTNAME] в моем компоненте, чтобы было ясно, откуда я беру свои константы, если пользователь пропустит мой импорт в верхней части файла компонента. .
Независимо от того, как вы хотите импортировать свои константы в свои компоненты, вы можете сделать это еще проще. Все, что вам нужно сделать, это взять каждый раздел ваших констант, которые в настоящее время находятся в index.js, поместить их в свой новый файл в /src/constants и связать их с нашим файлом констант/index.js для удобства ссылок.
Итак, например, у меня было четыре константы выше для моего компонента «Matcher». Я могу вытащить их из index.js и создать новый файл в src/constants/matcher.js и экспортировать оттуда свои константы:
//matcher.jsexport const POSTURL = "http://localhost:4000/api/v1/patterns"
export const DELETEURL = "http://localhost:4000/api/v1/patterns/"
export const DeleteButton = require('../images/delete-icon.png')
export const LoadingWheel = require('../images/loading-wheel.gif')
 gif')
gif') Затем все, что мне нужно сделать в моем файле index.js заменяет код, который я только что переместил в matcher.js, на следующий:
//index.jsexport * from './matcher';
Когда это будет завершено, у меня все еще будут те же функции, что и раньше, но я могу более четко понять структуру своего проекта, просто просматривая файл констант для каждого компонента. Кроме того, я все еще могу ссылаться на все так же, как и раньше, с помощью простой import * as Constants , или я мог бы сделать что-то вроде:
import { POSTURL } from 'constants/matcher'; …если бы я предпочел просто вызвать одну константу, которая была определена ранее.
Выделение констант — это прекрасный способ сделать ваш проект более понятным для тех, кто читает ваш код, одновременно сокращая ненужное повторение констант от компонента к компоненту. Это было чрезвычайно полезно для меня, и я настоятельно рекомендую всем добавить его в свои проекты как можно скорее, если они еще не включили его.
Дайте мне знать в комментариях ниже, как вы структурируете свои константы. Есть несколько различных способов сделать это, которые отличаются от моей стратегии выше, и я хотел бы услышать от вас всех!
Дальнейшее чтение:
- https://medium.com/@z_callan/javascript-project-architecture-constants-deddfde3c8a8
Поведение компонента модели AUTOSAR — MATLAB & Simulink
Модель AUTOSAR Component Behavior
В Simulink ® можно моделировать поведение компонента AUTOSAR, в том числе поведение runnables, события и интерактивные переменные.
AUTOSAR Elements for Modeling Component Behavior
Runnables
Inter-Runnable Variables
Included Data Type Sets
System Constants
Per-Instance Memory
Static и постоянная память
Общие параметры и параметры экземпляра
Параметры порта
Элементы AUTOSAR для моделирования поведения компонентов
Для моделирования поведения компонента AUTOSAR вы моделируете элементы AUTOSAR, описывающие планирование
и аспекты совместного использования ресурсов компонента. Элементы AUTOSAR, которые опираются на компонент
поведение включает:
Элементы AUTOSAR, которые опираются на компонент
поведение включает:
Runnables и события, на которые они реагируют компонент
Включенные наборы типов данных, которые предоставляют внутренние типы данных компонента
Системные константы, используемые для указания доступных значений констант системного уровня для справки в алгоритмах компонентов
Память каждого экземпляра, используемая для указания глобальной памяти конкретного экземпляра внутри компонент
Статическая и постоянная память для доступа к глобальным данным и значениям параметров в компонент
Общие параметры и параметры экземпляра для доступа к внутренним параметрам компонента data
Параметры порта для доступа к данным параметров на основе порта
В этом разделе описывается моделирование элементов AUTOSAR, которые помогают определить компонент
поведение.
Runnables
Программные компоненты AUTOSAR содержат runnables, прямо или косвенно запланированные базовой операционной системой AUTOSAR.
На этом рисунке показан программный компонент AUTOSAR с двумя запускаемыми модулями, Runnable.
1 и Рабочие 2 . RTEEvents, события, генерируемые AUTOSAR
Среда выполнения (RTE) запускает каждый исполняемый модуль. Например, TimingEvent является RTEEvent.
который генерируется периодически.
Компонент также может содержать один исполняемый объект, представленный моделью, и может быть однотарифные или многотарифные.
Дополнительные сведения см. в разделе Настройка исполняемых модулей и событий AUTOSAR.
Inter-Runnable Variables
В AUTOSAR inter-runnable переменные используются для передачи данных
между runnables в одном компоненте. Вы определяете эти переменные в модели Simulink сигнальными линиями, которые соединяют подсистемы (runnables). Например, в
следующий рисунок,
Например, в
следующий рисунок, irv1 , irv2 , irv3 и irv4 являются взаимозаменяемыми переменными.
Вы можете указать имена и режимы доступа к данным взаимозаменяемых переменных, которые вы экспорт.
Включенные наборы типов данных
В модели программного компонента AUTOSAR можно импортировать и экспортировать описание ARXML.
набора включенных типов данных AUTOSAR ( IncludedDataTypeSet ). Ан IncludedDataTypeSet определяется как часть внутреннего поведения
программная составляющая. Он содержит ссылки на определения типов данных AUTOSAR, которые
внутренне по отношению к компоненту и не присутствует в описаниях интерфейса компонента.
определения внутренних типов данных, на которые ссылаются, могут совместно использоваться несколькими программными компонентами,
как описано в разделе «Импорт и ссылки на общие определения элементов AUTOSAR».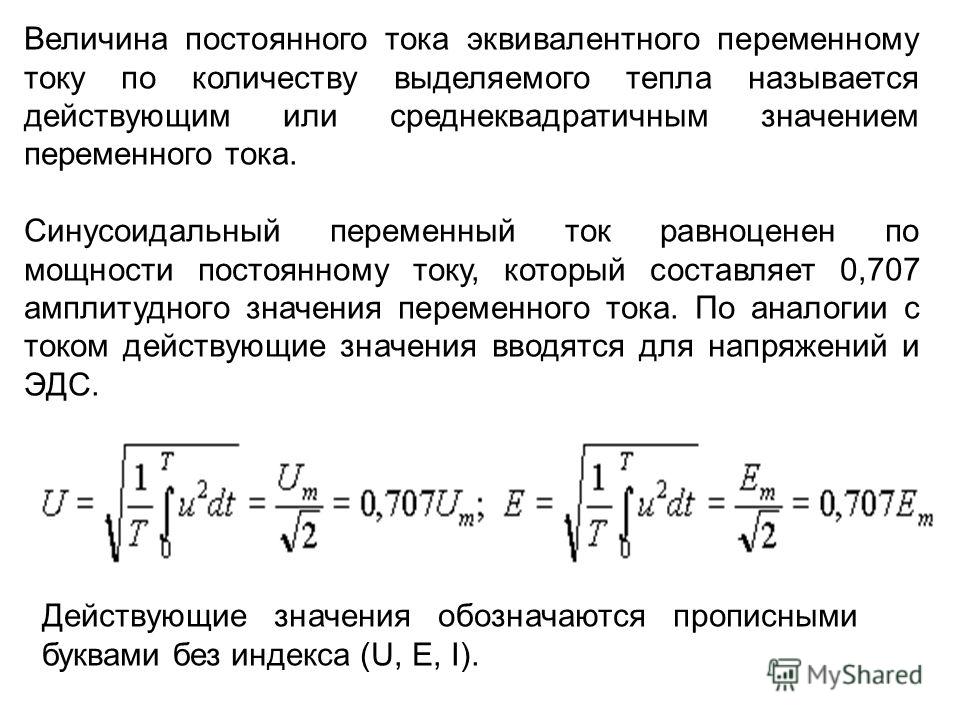
При импорте файлов ARXML, содержащих IncludedDataTypeSet описание в Simulink, импортер создает внутренние типы данных в модели компонентов AUTOSAR и
сопоставляет их с заголовочным файлом Rte_Type.h .
В модели компонентов AUTOSAR для настройки внутренних типов данных для экспорта в ARXML Описание IncludedDataTypeSet , сопоставление внутренних типов данных с заголовком
файл Rte_Type.h . Построение компонентной модели:
For AUTOSAR IncludedDataTypeSet export, Simulink supports these data types:
Numeric
Alias
Bus
Fixed-point
Enumerated
Literal prefixes for enumeration литералы обрабатываются по-разному между импортированными и
создано IncludedDataTypeSets :
Если вы импортируете
IncludedDataTypeSet, который определяетLiteralPrefixкак общий префикс для литералов перечисления, импортер сохраняетLiteralPrefixдля экспорта и туда и обратноIncludedDataTypeSet.Если вы настраиваете внутренние типы данных в модели компонентов для экспорта в AUTOSAR
IncludedDataTypeSetэкспортер создает типы данных вIncludedDataTypeSetс пустымLiteralPrefix.

Дополнительные сведения см. в разделе Настройка внутренних типов данных для AUTOSAR IncludedDataTypeSets.
Системные константы
Системные константы AUTOSAR ( SwSystemConstant s) указывают системный уровень
постоянные значения, доступные для ссылки в алгоритмах компонентов. Добавить АВТОСАР
системные константы в вашу модель, вы можете:
Импортировать их из файлов ARXML.
Создайте их в Simulink, используя объекты
AUTOSAR.Parameter, которые имеют Класс хранения установлен наСистемная Константа.
Затем вы можете ссылаться на системные константы AUTOSAR в алгоритмах Simulink. Например, вы можете сослаться на системную константу в блоке Gain,
или в формуле условия внутри варианта подсистемы или ссылки на модель.
Например, вы можете сослаться на системную константу в блоке Gain,
или в формуле условия внутри варианта подсистемы или ссылки на модель.
При ссылке на системную константу AUTOSAR в вашей модели:
Экспортированные файлы ARXML содержат соответствующий
SwSystemConstantи соответствующий прокси-сервер точки вариации AUTOSAR (VariationPointProxy) который ссылается наSwSystemConstant. Если вы генерируете модульный ARXML файлы,SwSystemConstantнаходится вимя модели_datatype.arxmlVariationPointProxyнаходится вназвание модели_component.arxmlСгенерированный код C использует сгенерированный
VariationPointProxyместами где модель используетSwSystemConstant.

Для примера системной константы AUTOSAR, представляющей условное значение связанный с логикой условия варианта, см. Настройка вариантов для исполняемых реализаций AUTOSAR.
Память каждого экземпляра
AUTOSAR поддерживает память для каждого экземпляра, что позволяет указать глобальная память внутри программного компонента. Генератор среды выполнения AUTOSAR выделяет эту память и предоставляет API, через который вы получаете доступ к этой памяти.
Память для каждого экземпляра может быть типа AUTOSAR или C-типа. Память для каждого экземпляра типа AUTOSAR
( arTypedPerInstanceMemory ) описывается с использованием типов данных AUTOSAR, а не
чем типы С. При экспорте в файлы ARXML arTypedPerInstanceMemory позволяет использовать инструменты калибровки и измерения для мониторинга глобальной переменной
соответствует памяти для каждого экземпляра.
AUTOSAR также позволяет использовать память каждого экземпляра в качестве зеркала RAM для данных в
энергонезависимая оперативная память (NVRAM). Вы можете получить доступ и использовать NVRAM в своем приложении AUTOSAR. Для большего
информацию о моделировании доступа программных компонентов к энергонезависимой памяти AUTOSAR см.
Модель AUTOSAR Энергонезависимая память.
Вы можете получить доступ и использовать NVRAM в своем приложении AUTOSAR. Для большего
информацию о моделировании доступа программных компонентов к энергонезависимой памяти AUTOSAR см.
Модель AUTOSAR Энергонезависимая память.
Чтобы добавить в модель память каждого экземпляра AUTOSAR, вы можете:
Для модели arTypedPerInstanceMemory вы можете использовать блочные сигналы,
дискретные состояния или хранилища данных в вашей модели AUTOSAR:
Чтобы использовать блочные сигналы и дискретные состояния, используйте редактор Code Mappings, Вкладка Signals/States , чтобы выбрать сигнал или состояние и сопоставить его с
arTypedPerInstanceMemory. Для просмотра и изменения кода AUTOSAR и атрибуты калибровки для памяти каждого экземпляра, щелкните значок икона.Для использования хранилищ данных используйте редактор Code Mappings, Хранилища данных вкладку, чтобы выбрать хранилище данных и сопоставить его с
arTypedPerInstanceMemory. Чтобы просмотреть и изменить код AUTOSAR и атрибуты калибровки для памяти каждого экземпляра,
щелкните значок.
 Чтобы просмотреть и изменить код AUTOSAR и атрибуты калибровки для памяти каждого экземпляра,
щелкните значок.
Чтобы просмотреть и изменить код AUTOSAR и атрибуты калибровки для памяти каждого экземпляра,
щелкните значок.Дополнительные сведения см. в разделе Настройка памяти для каждого экземпляра AUTOSAR.
Статическая и постоянная память
AUTOSAR поддерживает данные в статической памяти (StaticMemory) и постоянной памяти (ConstantMemory). Статическая память соответствует внутренним глобальным сигналам Simulink. Постоянная память соответствует внутренним глобальным параметрам Simulink. В Simulink вы можете импортировать и экспортировать ARXML-описания статических и постоянных данных AUTOSAR. объем памяти. При экспорте в файлы ARXML статическая память и постоянная память позволяют использовать средства калибровки и измерения для контроля данных внутренней памяти.
Для моделирования статической памяти AUTOSAR в Simulink используйте редактор Code Mappings, Signals/States или Хранилища данных вкладка. Выберите сигнал, состояние или хранилище данных и сопоставьте их с
Выберите сигнал, состояние или хранилище данных и сопоставьте их с Статическая память . Просмотр и изменение кода и калибровки AUTOSAR
атрибуты статической памяти, щелкните значок .
Чтобы смоделировать постоянную память AUTOSAR в Simulink, используйте редактор Code Mappings, вкладка Parameters , чтобы выбрать
параметр и сопоставьте его с Постоянная память . Для просмотра и изменения
Код AUTOSAR и атрибуты калибровки для постоянной памяти, нажмите кнопку
икона.
Дополнительные сведения см. в разделах Настройка статической памяти AUTOSAR и Настройка постоянной памяти AUTOSAR.
Общие параметры и параметры экземпляра
AUTOSAR поддерживает общие параметры ( SharedParameter s) и
параметры экземпляра ( PerInstanceParameter s) для использования в программном обеспечении
компоненты, которые потенциально могут быть созданы несколько раз. Значения общих параметров
общий для всех экземпляров компонента. Значения параметров для каждого экземпляра уникальны и
частный для каждого экземпляра компонента.
Значения общих параметров
общий для всех экземпляров компонента. Значения параметров для каждого экземпляра уникальны и
частный для каждого экземпляра компонента.
В Simulink вы можете импортировать и экспортировать описания ARXML общих и параметры экземпляра. При экспорте в файлы ARXML общие параметры и параметры экземпляра позволяют использовать инструменты калибровки и измерения для контроля параметров компонентов.
Чтобы смоделировать общий параметр AUTOSAR в Simulink, настройте параметр рабочей области модели, который не является аргументом модели (то есть
не уникален для каждого экземпляра многоэкземплярной модели). Например, в обозревателе моделей
просмотр параметра, очистить Аргумент свойство. В Кодексе
Редактор сопоставлений, вкладка Параметры , выберите параметр и сопоставьте его с
тип параметра SharedParameter . Для просмотра и изменения кода AUTOSAR
и атрибуты калибровки для общего параметра щелкните значок.
Чтобы смоделировать параметр AUTOSAR для каждого экземпляра в Simulink, настройте параметр рабочей области модели, который является аргументом модели (то есть,
уникальным для каждого экземпляра многоэкземплярной модели). Например, в представлении Model Explorer
параметра, выберите Аргумент свойство. В сопоставлении кода
редактор, вкладка Параметры , выберите параметр и сопоставьте его с параметром PerInstanceParameter . Для просмотра и изменения кода AUTOSAR и
атрибуты калибровки для параметра экземпляра, щелкните значок.
Дополнительные сведения см. в разделе Настройка общих или индивидуальных параметров AUTOSAR.
Параметры порта
Стандарт AUTOSAR определяет параметры порта для передачи параметров. АВТОСАР
передача параметров зависит от компонента программного обеспечения параметров
( ParameterSwComponent ) и один или несколько атомарных программных компонентов, которые
требуют доступа на основе порта к данным параметров. Компонент
Компонент ParameterSwComponent представляет собой память, содержащую параметры AUTOSAR, и предоставляет данные параметров подключенным
атомарные программные компоненты.
В Simulink можно смоделировать приемную сторону передачи параметров AUTOSAR. От импортируя описания ARXML или настраивая модель программного компонента, вы можете модель:
Компонент приемника параметров AUTOSAR, который взаимодействует с
ParameterSwComponentдля получения данных параметров.Интерфейс параметров AUTOSAR, который содержит элементы данных параметров. Данные элементы сопоставляются с объектами таблицы параметров или таблицы поиска в рабочей области модели.
Порт приемника параметров AUTOSAR, используемый для связи с
ПараметрSwComponent.
При генерации кода для компонента приемника параметров AUTOSAR:
Экспортированные файлы ARXML содержат описания компонента приемника параметров, интерфейс параметров, элементы данных параметров и порт приемника параметров.
Сгенерированный код C содержит параметр порта AUTOSAR
Rteвызовы функций.

Во время выполнения программное обеспечение может обращаться к элементам данных параметров как на основе портов. параметры.
Поскольку данные параметров порта ограничены рабочей областью модели и AUTOSAR компонент:
Различные компоненты могут использовать одни и те же имена параметров без именования конфликты.
Композиция AUTOSAR может содержать несколько экземпляров приемника параметров компонент, каждый со значениями данных параметра порта для конкретного экземпляра.
Дополнительные сведения см. в разделе Настройка параметров порта AUTOSAR для связи с компонентом параметров.
См. также
Память хранилища данных
Related Examples
- Configure AUTOSAR Runnables and Events
- Configure Variants for AUTOSAR Runnable Implementations
- Configure Internal Data Types for AUTOSAR IncludedDataTypeSets
- Configure AUTOSAR Per-Instance Memory
- Configure AUTOSAR Static Memory
- Configure AUTOSAR Constant Memory
- Настройка общих или индивидуальных параметров AUTOSAR
- Настройка параметров порта AUTOSAR для связи с компонентом параметров
Подробнее о
- Конфигурация компонента AUTOSAR
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB.