
Электромагнитные двигатели: схема, принцип работы
Электромагнитные двигатели — это устройства, которые работают по принципу индукции. Некоторые люди называют их электромеханическими преобразователями. Побочным эффектом данных устройств считается обильное выделение тепла. Существуют модели постоянного и переменного типа.
Также устройства различают по типу ротора. В частности, есть короткозамкнутые и фазные модификации. Сфера применения электромагнитных двигателей очень широкая. Встретить их можно в бытовых приборах, а также промышленных агрегатах. Активно используются они и в самолетостроении.
Схема двигателя
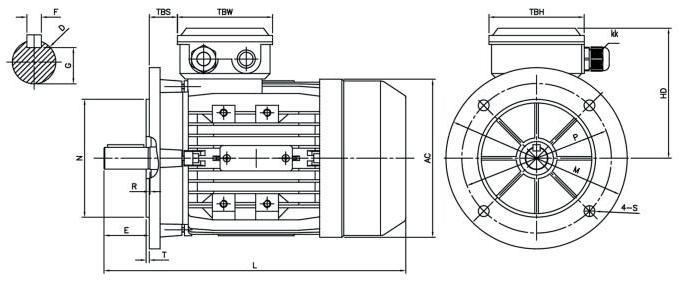
Схема электромагнитного двигателя включает в себя статор, а также ротор. Коллекторы, как правило, применяются щеточного типа. Ротор состоит из вала, а также наконечника. Для охлаждения системы часто устанавливаются вентиляторы. Для свободного вращения вала имеются роликовые подшипники. Также существуют модификации с магнитопроводами, которые являются неотъемлемой частью статора. Над ротором располагается контактное кольцо. В мощных модификациях используется втягивающее реле. Непосредственно подача тока осуществляется через кабель.
Принцип работы двигателя
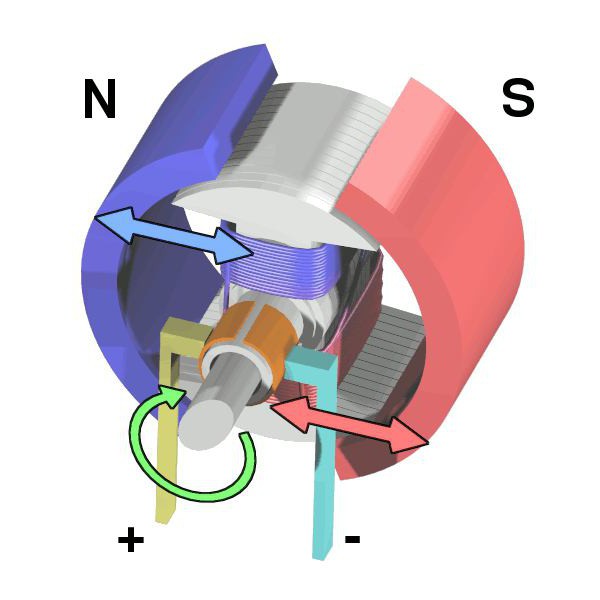
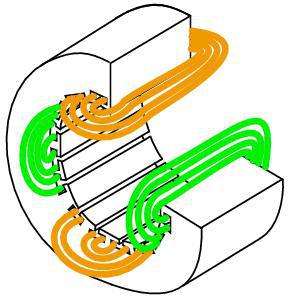
Как говорилось ранее, принцип действия построен на электромагнитной индукции. При подключении модели образуется магнитное поле. Затем на обмотке возрастает напряжение. Под силой действия магнитного поля в действие приводится ротор. Частота вращения устройства в первую очередь зависит от количества магнитных полюсов. Коллектор в данном случае играет роль стабилизатора. Подача тока в цепь происходит через статор. Также важно отметить, что для защиты двигателя используются кожухи и уплотнители.
Как сделать своими руками?
Сделать обычный электромагнитный двигатель своими руками довольно просто. В первую очередь следует заняться ротором. Для этого придется найти металлический стержень, который будет играть роль вала. Также потребуется два мощных магнита. На статоре должна находиться обмотка. Далее останется лишь установить щеточный коллектор. Электромагнитные двигатели-самоделки подсоединяются к сети через проводник.
Модификации для машин
Электромагнитные двигатели для автомобилей изготавливаются только коллекторного типа. Мощность их в среднем составляет 40 кВт. В свою очередь, параметр номинального тока равняется 30 А. Статоры в данном случае используются двухполюсные. У некоторых модификаций имеется клеммная коробка. Для охлаждения системы применяются вентиляторы.
Также в устройствах предусмотрены специальные отверстия для циркуляции воздуха. Роторы в двигателях устанавливаются с металлическими сердечниками. Для защиты вала используются уплотнители. Статор в данном случае находится в кожухе. Электромагнитные двигатели для машин с втягивающими реле встречаются редко. В среднем диаметр вала не превышает 3.5 см.

Устройства для самолетов
Работа двигателей данного типа построена на принципе электромагнитной индукции. Для этого статоры применяются трехполюсного типа. Также электромагнитные двигатели летательных аппаратов включают в себя бесщеточные коллекторы. Клеммные коробки в устройствах располагаются над контактными кольцами. Неотъемлемой частью статора является якорь. Вал вращается благодаря роликовым подшипникам. У некоторых модификаций применяются щеткодержатели. Также важно упомянуть о различных типах клеммных коробок. В данном случае многое зависит о мощности модификации. Электромагнитные двигатели для самолетов с целью охлаждения оборудуются вентиляторами.
Двигатели-генераторы
Электромагнитные двигатели-генераторы выпускаются со специальными бендиксами. Также схема устройства включает в себя втягивающие реле. Для запуска ротора применяются сердечники. Статоры в устройствах используются двухполюсного типа. Непосредственно вал у них крепится на роликовых подшипниках. У большинства двигателей имеется резиновая заглушка. Таким образом, ротор изнашивается медленно. Еще есть модификации с щеткодержателями.
Модели с короткозамкнутым ротором
Электромагнитный двигатель с короткозамкнутым ротором часто устанавливается в бытовых приборах. Мощность моделей в среднем равняется 4 кВт. Непосредственно статоры используются двухполюсного типа. Роторы крепятся в задней части двигателя. Вал у моделей применяется небольшого диаметра. На сегодняшний день чаще всего выпускаются асинхронные модификации.
Клеммные коробки в устройствах отсутствуют. Для подачи тока используются специальные полюсные наконечники. Также схема двигателя включает в себя магнитопроводы. Крепятся они возле статоров. Еще важно отметить, что выпускаются устройства с щеткодержателями и без них. Если рассматривать первый вариант, то в данном случае устанавливаются специальные зубчатые передачи. Таким образом, статор ограждается от магнитного поля. Устройства без щеткодержателя имеют уплотнитель. Бендиксы в двигателях устанавливаются за статором. Для их фиксации применяются шпонки. Недостатком данных устройств считается быстрый износ сердечника. Возникает он из-за повышенной температуры в двигателе.
Модификации с фазным ротором
Электромагнитный двигатель с фазным ротором устанавливается на станки и часто используется в тяжелой промышленности. Магнитопроводы в данном случае имеются с якорями. Отличительной чертой устройств принято считать большие валы. Непосредственно напряжение на обмотку подается через статор. Для вращения вала используется щеткодержатель. В некоторых из них установлены контактные кольца. Также важно отметить, что мощность моделей в среднем составляет 45 кВт. Непосредственно питание двигателей может осуществляться только от сети с переменным током.

Коллекторный электромагнитный двигатель: принцип работы
Коллекторные модификации активно применяются для электроприводов. Принцип действия у них довольно простой. После подачи напряжения в цепь задействуется ротор. Электромагнитное поле запускает процесс индукции. Возбуждение обмотки заставляет вал ротора вращаться. Тем самым приводится в действие диск устройства. Для уменьшения силы трения используются подшипники. Также важно отметить, что в моделях устанавливаются щеткодержатели. В задней части устройств часто имеется вентилятор. Для того чтобы вал не терся об уплотнитель, применяется защитное кольцо.
Бесколлекторные модификации
Бесколлекторные модификации в наше время не являются распространенными. Используются они для вентиляционных систем. Отличительной их особенностью считается бесшумность. Однако следует учитывать, что модели выпускаются небольшой мощности. В среднем указанный параметр не превышает 12 кВт. Статоры в них часто устанавливаются двухполюсного типа. Валы используются короткие. Для ограждения ротора применяются специальные уплотнители. Иногда двигатели заключаются в кожух, у которого имеются вентиляционные каналы.
Модели с независимым возбуждением
Модификации данного типа отличаются клеммными магнитопроводами. В данном случае устройства работают в сети только с переменным током. Непосредственно напряжение в первую очередь подается на статор. Роторы у моделей изготавливаются с коллекторами. У некоторых модификаций мощность достигает 55 кВт.
По типу якорей устройства отличаются. Щеткодержатели часто устанавливаются на стопорном кольце. Также важно отметить, что коллекторы в устройствах используются с уплотнителями. Диски в данном случае располагаются за статорами. У многих двигателей бендиксы отсутствуют.
Схема двигателя с самовозбуждением
Электромагнитные двигатели данного типа способны похвастаться высокой мощностью. В данном случае обмотки имеются высоковольтного типа. Подача напряжения происходит через клеммные контакты. Непосредственно ротор крепится за щеткодержателем. Уровень рабочего тока в устройствах составляет 30 А. В некоторых модификациях применяются якоря с щеткодержателями.
Также есть устройства с однополюсными статорами. Непосредственно вал находится в центре двигателя. Если рассматривать устройства большой мощности, то у них применяются вентилятор для охлаждения системы. Также на кожухе располагаются небольшие отверстия.
Модели с параллельным возбуждением
Электромагнитные двигатели данного типа изготавливаются на базе щеточных коллекторов. Якоря в данном случае отсутствуют. Вал в устройствах крепится на роликовых подшипниках. Также для уменьшения силы трения используются специальные лапы. У некоторых конфигураций есть магнитопроводы. Подключаться модели могут только к сети с постоянным током.
Еще важно отметить, что на рынке в основном представлены трехтактные модификации. Щеткодержатели в устройствах выполнены в форме цилиндров. По мощности модели отличаются. В среднем параметр рабочего тока на холостом ходе не превышает 50 А. Для усиления электромагнитного поля применяются роторы с высоковольтной обмоткой. У некоторых конфигураций используются наконечники на магнитопроводах.
Устройства последовательного возбуждения
Принцип работы двигателей данного типа довольно простой. Непосредственно напряжение подается на статор. Далее ток проходит по обмотке ротора. На данном этапе происходит возбуждение первичной обмотки. Вследствие этого приводится в действие ротор. Однако следует учитывать, что работать двигатели способны только в сети с переменным током. Наконечники в данном случае применяются с магнитопроводом.
Некоторые устройства оснащены щеткодержателями. Мощность моделей колеблется от 20 до 60 кВт. Для фиксации вала используются стопорные кольца. Бендиксы в данном случае располагаются в нижней части конструкции. Клеммники отсутствуют. Также важно отметить, что вал устанавливается различного диаметра.
Двигатели смешанного возбуждения
Электромагнитные двигатели данного типа могут использоваться только для приводов. Ротор здесь чаще всего устанавливается с первичной обмоткой. В данном случае показатель мощности не превышает 40 кВт. Номинальная перегрузка системы составляет около 30 А. Статор в устройствах применяется трехполюсного типа. Подключать указанный двигатель можно только в сеть с переменным током. Клеммные коробки у них используются с контактами.
Некоторые модификации оснащены щеткодержателями. Также на рынке представлены устройства с вентиляторами. Уплотнители чаще всего располагаются над статорами. Действуют устройства по принципу электромагнитной индукции. Первичное возбуждение осуществляется на магнитопроводе статора. Также важно отметить, что в устройствах применятся высоковольтная обмотка. Для фиксации вала используются защитные кольца.
Устройства переменного тока
Схема модели данного типа включает статор двухполюсного типа. В среднем мощность устройства равняется 40 кВт. Ротор здесь применяется с первичной обмоткой. Также есть модификации, у которых имеются бендиксы. Устанавливаются они у статора и играю роль стабилизатора электромагнитного поля.
Для вращения вала применяется ведущая шестерня. В данном случае лапы устанавливаются для уменьшения силы трения. Также используются полюсные наконечники. Для защиты механизма применяются кожухи. Магнитопроводы у моделей устанавливаются лишь с якорями. В среднем рабочий ток в системе поддерживается на уровне 45 А.

Синхронные устройства
Схема синхронного двигателя включает в себя двухполюсный статор, а также щеточный коллектор. В некоторых устройствах применяется магнитопровод. Если рассматривать бытовые модификации, то в них используются щеткодержатели. В среднем параметр мощности составляет 30 кВт. Устройства с вентиляторами встречаются редко. У некоторых моделей применяются зубчатые передачи.
Для охлаждения двигателя на кожухе имеются вентиляционные отверстия. В данном случае стопорное кольцо устанавливается у основания вала. Обмотка используется низковольтного типа. Принцип работы синхронной модификации построен на индукции электромагнитного поля. Для этого в статоре устанавливаются магниты разной мощности. При возбуждении обмотки вал начинается вращаться. Однако частотность у него невысокая. Мощных модели имеют коллекторы с реле.
Схема асинхронного двигателя
Асинхронные модели являются компактными и часто используются в бытовых приборах. Однако в тяжелой промышленности они также являются востребованными. В первую очередь следует отметить их защищенность. Роторы в устройствах применяются только однополюсного типа. Однако статоры устанавливаются с магнитопроводами. В данном случае обмотка применяется высоковольтного типа. Для стабилизации электромагнитного поля есть бендикс.
Крепится он в устройстве благодаря шпонке. Втягивающее реле в них располагается за якорем. Вал устройства вращается на специальных роликовых подшипниках. Также важно отметить, что есть модификации с бесщеточными коллекторами. Используются они в основном для приводов различной мощности. Сердечники в данном случае установлены удлиненные, и располагаются они за магнитопроводами.
Электромагнитный двигатель Radial Solenoid Engine своими руками
Экология потребления.Наука и техника:Одним из вариантов магнитного двигателя является продукт под названием Radial Solenoid Engine. Тестируется его режим работы.
В этом видео показан электромагнитный двигатель Radial Solenoid Engine, изготовленный своими руками. Это радиальный электромагнитный мотор, проверяется его работа в разных режимах. Показано, как расположены магниты, которые не приклеены, они прижаты диском и обмотаны изолентой. Но при больших оборотах все же происходит смещение и они склонны к тому, чтобы отойти от конструкции.
В данном тесте участвуют три катушки, которые соединены последовательно. Напряжение АКБ 12V. Положение магнитов определяется с помощью датчика Холла. Ток потребления катушки измеряем при помощи мультиметра.
Проведем тест на определение количества оборотов на трех катушках. Скорость вращения приблизительно 3600 оборотов в минуту. Схема собрана на макетной плате. Питание от аккумулятора 12 вольт, в схему включены стабилизатор, два светодиода, подключенные к датчику холла. 2-канальный датчик холла AH59, причем один канал открывается при прохождении рядом южного и северного полюсов магнита. Светодиоды периодически моргают. Управляющий мощный полевой транзистор IRFP2907.
Работа датчика Холла
На макетной плате расположены два светодиода. Каждый подключен к своему каналу датчика. На роторе стоят неодимовые магниты. Их полюса чередуются по схеме север – юг – север. Южный и северный полюса проходят поочередно рядом с датичком Холла. Чем выше частота вращения ротора, тем чаще мигают светодиоды.
Регулировка частоты вращения двигателя осуществляется датчиком Холла. Мультиметр определяет ток потребления на одной из катушек, перемещая датчик Холла. Изменяется количество оборотов. Чем выше обороты мотора, тем выше ток потребления.
Теперь все катушки соединены последовательно и участвуют в тесте. Мультиметр также снимет ток потребления. Измерение частоты оборотов ротора показало максимум 7000 оборотов в минуту. Когда все катушки подключены старт происходит плавно и без внешнего воздействия. Когда три катушки подключены, нужно помогать рукой. При торможении ротора рукой ток потребления увеличивается.
Подключены шесть катушек. Три катушки в одной фазе, три в другой. Прибор снимает ток. Каждой фазой управляет полевой транзистор.
Измерение количества оборотов ротора. Стартовые токи выросли и номинальный ток тоже возжрос. Двигатель быстрее достигает предельных оборотов приблизительно 6900 оборотов в минуту. Затормозить мотор рукой очень сложно.
К трем катушкам подключено питание 12 вольт. Другие 3 катушки замкнуты проводом. Двигатель набирать обороты стал медленее. Прибор снимает ток потребления. К трем катушкам подключено питание 12 вольт. Данные три катушки замкнуты проводом. Ротор раскручивается более медленно, но доходит до максимальных оборотов и работает нормально.
Мультиметр снимает ток замыкания с трех катушек. Ток короткого замыкания. Четыре катушки соединены последовательно. Их сердечники находятся параллельно магнитам ротора.
Прибор измеряет ток потребления. Разгоняется медленее, но у этого расположения катушек нет момента залипания. Ротор вращается свободно. опубликовано econet.ru
Строим соленоидный двигатель « Учи физику!
«Сердце» любой движущейся модели — двигатель. В большинстве моделей используются электрические моторы постоянного или переменного тока. Вращение выходной оси такого мотора передается колесам модели через редуктор. Реже применяется двигатель с воздушной тягой. Это малогабаритные компрессионные моторы с пропеллером, устанавливаемые на быстроходных плавающих, летающих и гоночных моделях.
Существует и еще один тип двигателя — соленоидный, принцип работы которого основан на магнитном действии тока. Знают его немногие, в то же время он наиболее прост в изготовлении, и это его основное преимущество.
Катушка, это которой пропущен ток, втягивает железный сердечник — плунжер. Движение сердечника можно преобразовать во вращательное движение вала, применив шатунно-кривошипный механизм. Катушек следует брать одну, две, три и более, соответственно изменяя распределительный механизм для тока. Проще всего сделать двухкатушечный двигатель (см. чертеж).
Трехкатушечный двигатель несколько сложнее, зато мощность его больше и работает он равномернее (даже без маховика). Действует он так: ток от сети поступает через щетку одного из соленоидов к распределителю тока, затем идет в данный соленоид. Пройдя по обмотке, ток возвращается в сеть через общие кольца и щетку распределителя. Возникающее при этом сильное магнитное поле втягивает внутрь катушки плунжер, который стремится к середине катушки, а шатун и кривошип поворачивают коленчатый вал. Вместе с валом поворачивается распределитель тока, пускающий вход следующий соленоид.
Второй соленоид включается еще при работе первого, тем самым помогая ему в нужный момент, когда сила тяги первого плунжера ослабевает (при уменьшении длины плеча силы при повороте кривошипа). За вторым соленоидом включается третий. Далее все повторяется.
Лучшие каркасы катушек (соленоидов) получаются из текстолита, другой материал — крепкое дерево (размеры см. на чертеже). Наматываются катушки проводом ПЭЛ-1 диаметром 0,2—0,3 мм по 8—10 тысяч витков так, чтобы сопротивление каждой из них было 200—400 ом. Катушки нужно наматывать до заполнения каркаса, делая через каждые 500 витков прокладки из любой тонкой бумаги. Для более мощных двигателей нужны катушки с сопротивлением не ниже 200 ом.
Шатун легко сделать из велосипедной спицы (см. чертеж). Длина его 30 мм (между центрами головок). Верхняя головка шатуна представляет собой кольцеобразное ушко с внутренним диаметром 3 мм. Нижняя головка имеет специальный захват для шейки коленчатого вала. К прямому концу шатуна нужно припаять две полоски жести — получится вилка, надевающйяся на шейку кривошипа. Чтобы вилка не соскакивала, на концах полосок предусмотрены отверстия под медную проволоку для стягивания вилки.
Коленчатый вал (см. чертеж) делается из спицы колеса мотоцикла «К-58». Согнуть из спицы хороший вал довольно трудно, поэтому он делается из четырех частей, соединенных шейками кривошипов диаметром 3 мм и длиной 18 мм. Кривошипы вала расположены под углом в 120°. Концы спиц, уже имеющих нужную форму, сначала расклепывают, а затем сверлят отверстия диаметром 3 мм под пальцы кривошипов. Когда шейки кривошипов вставлены на место, их следует припаять с нерабочей стороны.
Распределитель тока напоминает коллектор электромотора.
Ток идет по катушке в течение поворота на 180°. Тем самым другой соленоид помогает первому в конце периода его работы. Распределитель тока изготовляется из латунной охотничьей гильзы любого калибра или любой другой трубки диаметром 15—20 мм.
Отрезав втулку, следует расчертить ее на четыре кольца шириной по 5 мм. Один конец в виде целого кольца, а остальные три — полукольца, повернутые относительно друг друга на 120°. Щетки делаются из стальной проволоки, немного расклепанной, или любых пружинящих пластинок шириной не более 3—4 мм.
Насаживать эти детали следует с клеем БФ-2. Валик зажимается на валу гайками (предварительно в месте насадки нарежьте резьбу) или вкрепляется шпонкой (иглой).
Распределитель тока ставится на валу так, чтобы первая катушка включалась в тот •момент, когда ее плунжер находится в самом низком положении. Бели поменять местами два провода, идущие от катушек к щеткам, то получим вращение вала в обратном направлении. Схема включения — на чертеже.
Катушки устанавливаются вертикально и сжимаются двумя деревянными планками с углублениями под бока катушек. Перпендикулярно к планкам с обеих сторон укрепляются боковые стойки (фанера или листовой металл). В боковых стойках устанавливаются подшипники под вал или просто латунные втулки.
Если боковые стойки металлические, то подшипники припаиваются, а если фанерные — на места установки подшипников нужно приклеить фанерные кружки диаметром 20 мм для утолщения гнезд. Желательно установить подшипники -и в средней части коленчатого вала. Промежуточные подшипники укрепляются специальными стойками из дерева или жести.
Чтобы коленчатый вал не сдвигался в стороны, на его концах, с отступом по 0,5 .мм от подшипников, припаиваются кольца из медной проволоки. Обязательно защитите двигатель чехлом из жести, фанеры или органического стекла.
Рассчитан двигатель на сеть 220 в переменного тока, но может работать и от постоянного тока. Не трудно приспособиться -и к сети напряжением 127 в, уменьшив число витков катушек на 4—5 тыс. и увеличив сечение провода до 0,4 -мм. При аккуратном изготовлении двигателя гарантируется мощность в 30—50 вт на валу.
Изготовить такой двигатель может любой юный техник, лучше делать его в кружке или школьной мастерской.
Автор: В. НИРОШИН, Журнал Юный техник №4-65г.
Соленоидный двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Соленоидный двигатель
Cтраница 1
Соленоидные двигатели можно классифицировать на резонансные и нерезонансные. По конструкции нерезонансные двигатели бывают однокатушечные и многокатушечные. В параметрическом двигателе сердечник при втягивании его в соленоид ( катушку) занимает среднее положение не сразу, а после нескольких колебаний около положения магнитного равновесия. При совпадении собственных колебаний сердечника с частотой сети наступает резонанс. [1]
Соленоидный двигатель является наиболее простым по конструкции из названных и компактным. Недостатками его являются низкий КПД и большая скорость движения рабочего органа. В настоящее время преодолеть эти недостатки является невозможным, что затрудняет применение подобного двигателя для насосов, предназначенных для добычи нефти. [2]
В однокатушечных соленоидных двигателях включение и выключение рабочей катушки осуществляется механическим выключателем под действием тела сердечника, что не нашло применения в приводе насосов, либо при помощи полупроводникового вентиля. Обратный ход в обоих случаях осуществляется за счет упругости пружины. В многокатушечных соленоидных двигателях попеременное включение катушек осуществляется при помощи вентилей. К каждой катушке ток от источника питания подается в один из полупериодов синусоидального напряжения. Сердечник поочередно втягивается то одной, то другой катушкой, совершая возвратно-поступательное движение. [3]
В качестве исполнительных элементов предполагается использовать реверсивные синхронные двигатели, шаговые реверсивные двигатели и кодовые наборы импульсных соленоидных двигателей. Исполнительные элементы могут воздействовать на дистанционные задатчики локальных регуляторов или непосредственно на исполнительные механизмы. [4]
Разрабатывались и проверялись схемы с приводом от соленоидных двигателей, схемы с различными механическими преобразователями вращательного движения в возвратно-поступательное. [5]
При неравенстве напряжений на конденсаторе переменной емкости Сх и постоянной емкости С1 на вход усилителя У прибора подается напряжение рассогласования Up, которое преобразуется вибропреобразователем ВП в переменное напряжение. Переменное напряжение усиливается усилителем У и подается на соленоидный двигатель М, который воздействует на конденсатор переменной емкости Сх и на показывающее и пишущее устройство прибора. [7]
Зону нечувствительности имеют тиратроны в двухтактной схеме и гидравлические серво-цилиндры, а гистерезис — пневматические клапаны и соленоидные двигатели. Примерами систем с изменяющимися параметрами служат реактивный двигатель и регуляторы давления переменного потока. Сюда же относится очень важная нелинейность, существующая во всех линейных системах — ограничение максимальной возможной величины корректирующей силы, момента или мощности. Это ограничение может быть вызвано источником питания, которым может служить баллон сжатого воздуха, паровой котел, электрический двигатель или генератор. Ограничение может также накладываться размерами и весом выходного преобразователя информации в мощность, который превращает пневматический или электрический управляю ций сигнал в регулируемую величину полезной механической мощности. В любом случае, когда управляющий сигнал превышает некоторую величину, выходной сигнал ограничен и не зависит от входных сигналов, превышающих уровень ограничения, или насыщения. [8]
В однокатушечных соленоидных двигателях включение и выключение рабочей катушки осуществляется механическим выключателем под действием тела сердечника, что не нашло применения в приводе насосов, либо при помощи полупроводникового вентиля. Обратный ход в обоих случаях осуществляется за счет упругости пружины. В многокатушечных соленоидных двигателях попеременное включение катушек осуществляется при помощи вентилей. К каждой катушке ток от источника питания подается в один из полупериодов синусоидального напряжения. Сердечник поочередно втягивается то одной, то другой катушкой, совершая возвратно-поступательное движение. [9]
Следует отметить, что проблема воздействия УВМ на исполнительные механизмы еще не нашла оптимального решения. Перечисленные устройства, связанные с использованием цифро-аналоговых преобразователей и специальных устройств памяти являются весьма громоздкими и обладают невысоким быстродействием. Поиски новых методов ведутся по пути создания цифровых исполнительных механизмов в виде, например, кодовых наборов соленоидных двигателей, а также применения реверсивных шаговых двигателей. [10]
Страницы: 1
Электромагнитный реактивный ускоритель — Википедия
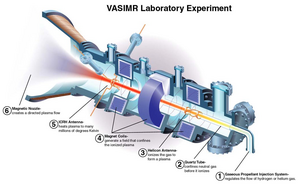
 VASIMR на испытательном стенде
VASIMR на испытательном стендеЭлектромагнитный ускоритель с изменяемым удельным импульсом (англ. Variable Specific Impulse Magnetoplasma Rocket; VASIMR) — электромагнитный плазменный двигатель, предназначенный для реактивного ускорения космического аппарата. Реактивный двигатель использует радиоволны для ионизации рабочего тела с последующим разгоном полученной плазмы с помощью электромагнитного поля, для получения тяги. Способ нагрева плазмы, используемый в VASIMR, был разработан в результате исследований в области термоядерного синтеза.
Цель разработки VASIMR — заполнить разрыв между высокоэффективными реактивными системами малой тяги с высоким удельным импульсом и низкоэффективными системами большой тяги с низким удельным импульсом. VASIMR способен работать в режимах, близких к системам большой тяги и малой.
Сама концепция двигателя была предложена астронавтом и учёным Франклином Чанг-Диазом в 1979 году и продолжает развиваться в настоящее время.
VASIMR, иногда рассматриваемый как электротепловой плазменный ускоритель (ЭПУ), использует радиоволны для ионизации и нагрева рабочего тела и электромагнитные поля для ускорения плазмы для создания тяги. Этот тип двигателя можно рассматривать как разновидность безэлектродного плазменного двигателя, отличающегося в способе ускорения плазмы. Оба типа двигателя не имеют никаких электродов. Основное преимущество такого проекта состоит в исключении эрозии электродов. Более того, так как все части VASIMR защищены магнитным полем и не приходят в прямой контакт с плазмой, потенциальная продолжительность эксплуатации двигателя, построенного по такому проекту, гораздо выше ионного двигателя.
Проект включает в себя три части:
- превращение газа в плазму с использованием радиоволновых антенн;
- возбуждение плазмы с помощью дальнейшего нагрева в ускорителе;
- использование электромагнитов для создания магнитного сопла, которое превращает полученную тепловую энергию плазмы в кинетическую энергию реактивной струи.
Изменяя количество энергии на радиоволновый разогрев и количество рабочего тела, из которого создаётся плазма, VASIMR способен как производить малую тягу с высоким удельным импульсом, так и относительно высокую тягу с низким удельным импульсом.
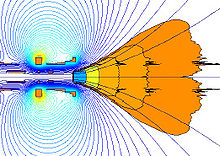 Диаграмма VASIMR
Диаграмма VASIMRВ отличие от обычных циклотронно-резонансных нагревающих процессов, ионы в VASIMR сразу же проходят через магнитное сопло быстрее времени, необходимого для достижения термодинамического равновесия. Согласно теоретической работе 2004 года Арефьева и Брейзмана из Техасского университета в Остине, практически вся энергия в ионной циклотронной волне будет равномерно распределена в ионизированной плазме за один проход в циклотронном абсорбционном процессе. Это позволяет ионам покинуть магнитное сопло с очень узким распределением энергии, что даёт упрощённое и более плотное распределение магнитов в двигателе.[1]
Текущие VASIMR должны обладать удельными импульсами в диапазоне от 3000 до 30 000 секунд (скорости истечения от 30 до 300 км/с). Нижний предел этого диапазона сопоставим с некоторыми существующими концепциями ионных двигателей. Регулируя получение плазмы и нагрев, в двигателе VASIMR можно управлять удельным импульсом и тягой. Двигатель также способен использовать гораздо более высокие уровни энергии (мегаватты) по сравнению с существующими концепциями ионных двигателей. Поэтому VASIMR может обеспечить в десятки раз большую тягу, при условии наличия подходящего источника энергии.
VASIMR не подходит для подъёма полезной нагрузки с поверхности планеты (например, Земли) на околопланетную орбиту, из-за его низкого соотношения тяги к массе и может быть использован только в невесомости (например, для старта корабля с околопланетной орбиты). Он может быть использован в качестве последней ступени, уменьшая потребность в топливе для транспортировки в космосе, или в качестве разгонного блока. Ожидается, что двигатель должен выполнять эти операции за доли стоимости от стоимости аналогов на основе технологий химического реактивного движения:
- компенсация торможения в верхней атмосфере Земли (подъём орбиты) для орбитальных станций,
- обеспечение доставки грузов на лунную орбиту,
- заправка топливом в космосе,
- добыча ресурсов в космосе,
- космические полёты со сверхвысокими скоростями для дальних исследовательских программ.
Другие применения VASIMR (например, доставка людей к Марсу) требуют наличия источников очень высоких энергий с небольшой массой, таких как, например, ядерные энергоблоки.
В августе 2008 г. Тим Гловер, директор по развитию фирмы «Ad Astra», заявил, что первым ожидаемым применением двигателя VASIMR является «заброс грузов (не людей) с низкой околоземной орбиты на низкую лунную орбиту» и будет предназначено для поддержки программы НАСА возвращения на Луну.[2]
 | Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Основным разработчиком VASIMR является «Ad Astra Rocket Company[en]» в Техасе. В настоящее время основные усилия были направлены на улучшение общей эффективности двигателя, путём увеличения уровней используемой энергии. Согласно данным компании, ещё совсем недавно эффективность VASIMR составляла 67 %. Опубликованные данные по двигателю VX-50 говорят о том, что двигатель способен использовать 50 кВт на излучение в радиодиапазоне, обладает КПД 59 %, вычисленное следующим образом: 90 % NA эффективность процесса получения ионов × 65 % NB эффективность процесса ускорения ионов. Модель VX-100, как ожидается, будет иметь общую эффективность 72 %, путём улучшения параметра NB, то есть эффективности ускорения ионов, до 80 %.[3][4]
Однако имеются дополнительные меньшие потери эффективности, относящиеся к превращению энергии постоянного тока в радиоволновую энергию и потребление энергии сверхпроводящими магнитами. Для сравнения, рабочий ионный двигатель NASA HiPEP, обладает общей эффективностью ускорителя 80 %.[5] Опубликованные данные испытаний двигателя VASIMR модели VX-50 показывают, что он способен производить 0,5 Н тяги. «Ad Astra Rocket Company» планировала проведение испытаний прототипа двигателя VX-200 в начале 2008 г. с мощностью излучения в радиодиапазоне 200 кВт с целью достижения требуемой эффективности, требуемой тяги и удельного импульса.
24 октября 2008 года компания заявила, что генерация плазмы двигателем VX-200 с помощью радиоволн первой ступени или твердотельным высокочастотным излучателем энергии достигла планируемых рабочих показателей. Ключевая технология, твердотельное преобразование энергии постоянного тока в радиоволны, стала крайне эффективной и достигла уровня 98 %. Радиоволновый импульс использует 30 кВт для превращения аргона в плазму, оставшиеся 170 кВт расходуются на разгон и разогрев плазмы в задней части двигателя с помощью ион-циклотронного резонансного разогрева.[6]
На основании данных, опубликованных по предыдущим испытаниям VX-100[7], можно ожидать, что двигатель VF-200, который должен быть установлен на МКС, будет иметь системную эффективность 60—65 % и уровень тяги 5 Н. Оптимальный удельный импульс предполагается на уровне 5000 с с использованием в качестве рабочего тела аргона. Удельная мощность оценивается в 1 кг/кВт, что означает, что масса данной версии VASIMR будет составлять только 300 кг.
Одна из оставшихся проблем — определение соотношения потенциально возможной тяги по отношению к действительному её значению. То есть, будет или нет горячая плазма находится на расстоянии от двигателя на самом деле. Это подтверждено в 2009 году, когда двигатель VX-200 был установлен и испытан в достаточно большой вакуумной камере[источник не указан 402 дня]. Другая проблема — управление выделяемой побочной теплотой при работе (60 % эффективности означает около 80 кВт ненужной теплоты), решение которой критически важно для продолжительной работы двигателя VASIMR.
10 декабря 2008 г. «Ad Astra Rocket Company» заключила договор с НАСА на определение расположения и испытание полётной версии VASIMR VF-200 на МКС; его запуск был запланирован на 2015 г.[8] VASIMR-двигатель на МКС будет использоваться в пакетно-монопольном режиме, с периодическими включениями. Так как производство электроэнергии на МКС недостаточно велико, система будет включать в себя набор батарей с достаточно малым потреблением тока для подзарядки, которая позволит двигателю работать в течение 10 мин. Этого будет достаточно для поддержания высоты станции, что исключит необходимость дорогостоящей операции по подъёму станции с использованием химических ракетных двигательных блоков.
7 июля 2009 года сотрудники «Ad Astra Rocket Company» удачно испытали плазменный двигатель на сверхпроводящих магнитах.[9]
В 2016 году компания Ad Astra Rocket сообщила, что КПД двигателя вырастет с 70 до 75 %, если использовать криптон вместо аргона, тяга двигателя достигнет 2 Н. Ведутся работы по замене старого магнита на сверхпроводящий магнит нового типа, без охлаждения жидким азотом. Остается проблема электрического заряда двигателя; при его работе струя выбрасывает заряженные ионы, но оставшиеся электроны заряжают корпус и в наземных условиях невозможно замерить этот эффект зарядки корпуса. Пока считается, что этот эффект мал и на всех электрических ракетных двигателях эта проблема была решена во время испытаний.
Летные испытания на МКС запланированы на 2016 год
| Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Космический буксир: орбитальный транспортный корабль[править | править код]
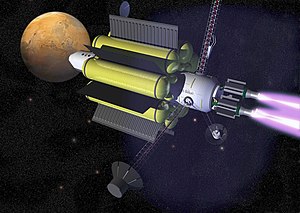 Космический корабль с VASIMR в представлении художника
Космический корабль с VASIMR в представлении художникаНаиболее важным в обозримом будущем применением космических аппаратов с двигателями VASIMR является перевозка грузов (особенно межпланетная). Многочисленные исследования показали, что космический корабль с маршевыми двигателями VASIMR будет более эффективным при движении в космосе по сравнению с кораблями с обычными химическими ракетными двигателями. Космический буксир, ускоряемый одним VF-200, был бы способен переместить 7 т груза с низкой земной орбиты на низкую лунную орбиту примерно за шесть месяцев полёта.
НАСА планирует перемещение 34 т полезного груза от Земли до Луны. Для того, чтобы совершить такое путешествие, должно быть сожжено около 60 тонн кислород/водород. Сопоставимый космический буксир требовал бы 5 двигателей VF-200, потребляющих 1 МВт электроэнергии, получаемой от солнечных батарей или от ядерного реактора. Для того, чтобы проделать такую же работу, подобный буксир потратил бы только 8 тонн аргона. Время полёта буксира может быть сокращено за счёт полёта с меньшим грузом или используя большее количество аргона в двигателях при меньшем удельном импульсе (большем расходе рабочего тела). Например, пустой буксир при возвращении к Земле должен покрывать это расстояние за 23 дня при оптимальном удельном импульсе 5000 с или за 14 дней при удельном импульсе 3000 с.
В 2015 году компания Ad Astra Rocket выиграла 10-миллионный тендер на постройку двигателя VASIMR, способного доставить экспедицию на Марс менее чем за сорок дней[10]. Предполагается, что 200-мегаваттный двигатель класса VASIMR сможет осуществлять полёты с доставкой людей к Марсу всего за 39 дней, по сравнению с шестью месяцами, которые требуются космическим аппаратам с обычными ракетными двигателями.[11]
Магнитные двигатели. Виды и устройство. Применение и работа
Магнитные двигатели (двигатели на постоянных магнитах) являются наиболее вероятной моделью «вечного двигателя». Еще в давние времена была высказана эта идея, но так никто его не создал. Многие устройства дают ученым возможность приблизиться к изобретению такого двигателя. Конструкции подобных устройств еще не доведены до практического результата. С этими устройствами связано много различных мифов.
Магнитные двигатели не расходуют энергию, являются агрегатом необычного типа. Силой, двигающей мотор, является свойство магнитных элементов. Электродвигатели также применяют магнитные свойства ферромагнетиков, но магниты приводятся в движение электрическим током. А это является противоречием основному принципиальному действию вечного двигателя. В двигателе на магнитах используется магнитное влияние на объекты. Под действием этих объектов начинается движение. Небольшими моделями таких двигателей стали аксессуары в офисах. На них двигаются постоянно шарики, плоскости. Но там для работы применены батарейки.
Ученый Тесла занимался серьезно проблемой образования магнитного двигателя. Его модель была выполнена из катушки, турбины, проводов для соединения объектов. В обмотку закладывался маленький магнит, захватывающий два витка катушки. Турбине давали небольшой толчок, раскручивали ее. Она начинала движение с большой скоростью. Такое движение называлось вечным. Двигатель Тесла на магнитах стал идеальной моделью вечного двигателя. Его недостатком стала необходимость начального задания скорости турбине.
По закону сохранения электропривод не может содержать более 100% КПД, энергия частично тратится на трение в двигателе. Такой вопрос должен решать магнитный двигатель, у которого постоянные магниты (роторный тип, линейный, униполярный). В нем осуществление механического движения элементов идет от взаимодействия магнитных сил.
Принцип работы
Многие инновационные магнитные двигатели применяют работу трансформации тока во вращение ротора, являющееся механическим движением. Вместе с ротором вращается вал привода. Это дает возможность утверждать, что всякий расчет не даст результата КПД равного 100%. Агрегат не получается автономным, он имеет зависимость. Такой же процесс можно увидеть в генераторе. В нем крутящий момент, который образуется от энергии движения, создает выработку электроэнергии на пластинах коллектора.
1 — Линия раздела магнитных силовых линий, замыкающихся через отверстие и внешнюю кромку кольцевого магнита
2 — Катящийся ротор (Шарик от подшипника)
3 — Немагнитное основание (Статор)
4 — Кольцевой постоянный магнит от громкоговорителя (Динамика)
5 — Плоские постоянные магниты (Защелки)
6 — Немагнитный корпус
Магнитные двигатели применяют другой подход. Необходимость в дополнительных источниках питания сводится к минимуму. Принцип работы легко объяснить «беличьим колесом». Для производства демонстративной модели не нужны специальные чертежи или прочностной расчет. Нужно взять постоянный магнит, чтобы его полюса находились на обеих плоскостях. Магнит будет главной конструкцией. К ней добавляется два барьера в виде колец (внешний и внутренний) из немагнитных материалов. Между кольцами располагают стальной шарик. В магнитном двигателе он станет ротором. Силами магнита шарик притянется к диску противоположным полюсом. Этот полюс не будет менять свое положение при движении.
Статор включает в себя пластину, изготовленную из экранируемого материала. На нее по траектории кольца закрепляют постоянные магниты. Полюса магнитов находятся перпендикулярно в виде диска и ротора. В итоге, при приближении статора к ротору на некоторое расстояние, появляется отталкивание и притяжение в магнитах поочередно. Оно создает момент, переходит во вращательное движение шарика по траектории кольца. Запуск и торможение осуществляется движением статора с магнитами. Такой метод магнитного двигателя действует, пока магнитные свойства магнитов будут сохраняться. Расчет делается относительно статора, шариков, управляющей цепи.
На таком же принципе работают действующие магнитные двигатели. Самыми известными стали магнитные двигатели на тяге магнитов Тесла, Лазарева, Перендева, Джонсона, Минато. Так же известны двигатели на постоянных магнитах: цилиндровые, роторные, линейные, униполярные и т.д. У каждого двигателя своя технология изготовления, основанная на магнитных полях, образующихся вокруг магнитов. Вечных двигателей не бывает, так как постоянные магниты утрачивают свои свойства через несколько сотен лет.
Магнитный двигатель Тесла
Ученый исследователь Тесла стал одним из первых, кто изучал вопросы вечного двигателя. В науке его изобретение называется униполярным генератором. Сначала расчет такого устройства сделал Фарадей. Его образец не произвел стабильности работы и должного эффекта, не достиг необходимой цели, хотя принцип действия был сходным. Название «униполярный» дает понять, что по схеме модели проводник находится в цепи полюсов магнита.
По схеме, обнаруженной в патенте, видна конструкция из 2-х валов. На них помещены 2 пары магнитов. Они образуют отрицательное и положительное поля. Между магнитами находятся униполярные диски с бортами, которые применяются как образующие проводники. Два диска друг с другом имеют связь тонкой лентой из металла. Лента может использоваться для вращения диска.
Двигатель Минато
Этот тип двигателя также использует магнетическую энергию для самостоятельного движения и самовозбуждения. Образец двигателя разработан японским изобретателем Минато более 30 лет назад. Двигатель обладает высокой эффективностью, характеризуется бесшумной работой. Минато утверждал, что магнитный самовращающийся двигатель такого исполнения выдает КПД более 300%.
Ротор изготовлен в форме колеса или дискового элемента. На нем находятся магниты, расположенные под определенным углом. Во время приближения статора с мощным магнитом создается момент вращения, диск Минато вращается, применяет отторжение и сближение полюсов. Скорость вращения и крутящий момент мотора зависит от расстояния между ротором и статором. Напряжение мотора подается по цепи реле прерывателя.
Для предохранения от биения и импульсных движений при вращении диска применяют стабилизаторы, оптимизируют расход энергии управляющего электрического магнита. Негативной стороной можно назвать то, что нет данных по свойствам нагрузки, тяге, которые применяются реле управления. Также периодически необходимо производить намагничивание. Об этом Минато в своих расчетах не упоминал.
Двигатель Лазарева
Русский разработчик Лазарев сконструировал действующую простую модель двигателя, применяющего магнитную тягу. Роторный кольцар включает в себя резервуар с пористой перегородкой на две части. Эти половины между собой сообщаются трубкой. По этой трубке поступает поток жидкости из нижней камеры в верхнюю. Поры создают перетекание вниз за счет гравитации.
При расположении колеса с расположенными на лопастях магнитами под напором жидкости возникает постоянное магнитное поле, двигатель вращается. Схема двигателя Лазарева роторного типа применяется при разработке простых устройств с самовращением.
Двигатель Джонсона
Джонсон в своем изобретении применял энергию, которая генерируется потоком электронов. Эти электроны находятся в магнитах, образуют цепь питания двигателя. Статор двигателя соединяет в себе множество магнитов. Они располагаются в виде дорожки. Движение магнитов и их расположение зависит от конструкции агрегата Джонсона. Компоновка может быть роторной или линейной.
1 — Магниты якоря
2 — Форма якоря
3 — Полюса магнитов статора
4 — Кольцевая канавка
5 — Статор
6 — Резьбовое отверстие
7 — Вал
8 — Кольцевая втулка
9 — Основание
Магниты прикрепляются к особой пластине, обладающей большой магнитной проницаемостью. Одинаковые полюса магнитов статора поворачиваются в сторону ротора. Этот поворот создает отторжение и притяжение полюсов по очереди. Совместно с ними смещаются элементы ротора и статора между собой.
Джонсон организовал расчет воздушного промежутка между ротором и статором. Он дает возможность коррекции усилия и магнитной совокупности взаимодействия в направлении увеличения или снижения.
Магнитный двигатель Перендева
Двигатель самовращающейся модели Перендева так же является примером применения работы магнитных сил. Создатель этого мотора Брэди оформил патент и создал фирму еще до начала уголовного дела на него, организовал работу на поточной основе.
При анализе принципа работы, схемы, чертежей в патенте можно понять, что статор и ротор выполнены в форме внешнего кольца и диска. На них по траектории кольца располагают магниты. При этом соблюдают угол, определенный по центральной оси. Из-за взаимного действия поля магнитов образуется момент вращения, осуществляется их перемещение друг относительно друга. Цепь магнитов рассчитывается путем выяснения угла расхождения.
Синхронные магнитные двигатели
Главным видом электрических двигателей является синхронный вид. У него обороты вращения ротора и статора одинаковые. У простого электромагнитного двигателя эти две части имеют в составе обмотки на пластинах. Если изменить конструкцию якоря, вместо обмотки установить постоянные магниты, то получится оригинальная эффективная рабочая модель двигателя синхронного типа.
1 — Стержневая обмотка
2 — Секции сердечника ротора
3 — Опора подшипника
4 — Магниты
5 — Стальная пластина
6 — Ступица ротора
7 — Сердечник статора
Статор сделан по привычной конструкции магнитопровода из катушек и пластин. В них образуется магнитное поле вращения от электрического тока. Ротор образует постоянное поле, взаимодействующее с предыдущим, и образует момент вращения.
Нельзя забывать о том, что относительное нахождение якоря и статора имею возможность изменяться в зависимости от схемы двигателя. Например, якорь может быть сделан в форме наружной оболочки. Для запуска двигателя от сети питания применяется схема из магнитного пускателя и реле тепловой защиты.
Похожие темы:
Магнитный двигатель своими руками: как сделать вечный электродвигатель
Сотни лет человечество пытается создать двигатель, который будет работать вечно. Сейчас этот вопрос, стоит особенно актуально, когда планета неминуемо движется к энергетическому кризису. Конечно, он может никогда и не наступить, но независимо от этого, люди все-таки нуждаются в том, чтобы отойти от привычных источников энергии и магнитный двигатель – отличный вариант.

Что такое магнитный двигатель
Все вечные двигатели можно разделить на 2 вида:
- Первые;
- Вторые.
Что касается первых, они представляют собой по большей мере плод фантазий писателей фантастов, но вторые – вполне реальные. Первый вид подобных двигателей извлекает энергию из пустого места, но второй, получает ее из магнитного поля, ветра, воды, солнца и т.д.
Магнитные поля не только активно изучают, но и пытаются использовать их в качестве «топлива» для вечного силового агрегата. Причем многие из ученых разных эпох добивались значительных успехов. Среди известных фамилий, можно отметить следующие:
- Николай Лазарев;
- Майк Брэди;
- Говард Джонсон;
- Кохеи Минато;
- Никола Тесла.

Особенное внимание уделялось именно постоянным магнитам, которые могут восстанавливать энергию в прямом смысле из воздуха (мирового эфира). Несмотря на то, что каких-то полноценных объяснений природы постоянных магнитов на данный момент нет, человечество двигается в правильном направлении.
На данный момент, есть несколько вариантов линейных силовых агрегатов, что имеют отличия по своей технологии и схеме сборки, но работают на основе одинаковых принципов:
- Работают благодаря энергии магнитных полей.
- Импульсного действия с возможностью контроля и дополнительного источника питания.
- Технологии, которые совмещают в себе принципы обоих силовых агрегатов.
Общее устройство и принцип работы
Двигатели на магнитах, не похожи на привычные электрические, в которых вращение происходит благодаря электрическому току. Первый вариант будет работать только благодаря постоянной энергии магнитов и имеет 3 главные части:
- ротор с постоянным магнитом;
- статор с электрическим магнитом;
- двигатель.
На один вал с силовым агрегатом монтируется генератор электромеханического типа. Статический электромагнит, сделан в виде кольцевого магнитопровода с вырезанным сегментом или дугой. Помимо всего прочего электрический магнит имеет также катушку индуктивности, к которой присоединен электрокоммутатор, благодаря которому поставляется реверсивный ток.

По сути, принцип работы разных магнитных моторов может отличаться исходя из типа моделей. Но в любом случае, основной движущей силой является именно свойство постоянных магнитов. Рассмотреть принцип работы, можно на примере антигравитационного агрегата Лоренца. Суть его работы заключается в 2-х разнозаряженных дисках, которые подсоединяются к источнику питания. Эти диски размещены наполовину в экране полусферической формы. Их начинают активно вращать. Таким образом, магнитное поле без труда выталкивается сверхпроводником.
История возникновения вечного двигателя
Первые упоминания о создании такого устройства возникли в Индии в VII веке, но первые практические пробы его создания возникли в VIII веке в Европе. Естественно, создание такого устройства позволило бы значительно ускорить развитие науки энергетики.
В те времена, такой силовой агрегат смог бы не только поднимать разные грузы, но и крутить мельницы, а также водяные насосы. В XX веке произошло знаменательное открытие, которое дало толчок к созданию силового агрегата – открытие постоянного магнита с последующим изучением его возможностей.

Модель мотора на его основе должна была работать неограниченное количество времени, из-за чего его назвали вечным. Но как бы там ни было, а вечного ничего нет, так как любая часть или деталь может прийти в неисправность, поэтому под словом «вечно» необходимо понимать только то, что он должен работать без перерывов, при этом не подразумевая каких-либо затрат, включая топливо.
Сейчас невозможно точно определить создателя первого вечного механизма, в основе которого, стоят магниты. Естественно, он сильно отличается от современного, но есть некоторые мнения на тот счет, что первые упоминания о силовом агрегате на магнитах, есть в трактате Бхскара Ачарья математика из Индии.
Первые сведения о появления такого устройства в Европе, появились в XIII веке. Информация поступила от Виллара д’Оннекура, выдающегося инженера и архитектора. После своей смерти, изобретатель оставил потомкам свой блокнот, в котором были разные чертежи не только сооружений, но и механизмов для поднятия грузов и собственно первым устройством на магнитах, что отдаленно напоминает вечный двигатель.
Магнитный униполярный двигатель Тесла
Значительных успехов в этой сфере достиг великий ученый, известный множеством открытий – Никола Тесла. Среди ученых, устройство ученого получило несколько иное название – униполярный генератор Тесла.

Стоит отметить, что первые исследования в этой области проводит Фарадей, но несмотря на то, что он создал прототип с похожим принципом работы, как впоследствии Тесла, стабильность и эффективность оставляли желать лучшего. Слово «униполярный», означает что в схеме устройства цилиндровый, дисковый или кольцевой проводник, находится между полюсами постоянного магнита.
Официальный патент представлял следующую схему, в которой имеется конструкция с 2-мя валами, на которых устанавливаются 2 пары магнитов: одна пара создает условно отрицательное поле, а другая пара – положительное. Между этими магнитами располагаются генерирующие проводники (униполярные диски), которые имеют связь между собой с использованием металлической ленты, которая по сути может быть использована не только для вращения диска, но и в качестве проводника.
Тесла известен большим количеством полезных изобретений.
Двигатель Минато
Очередным отличным вариантом такого механизма, в котором энергия магнитов применяется в качестве бесперебойной автономной работы, является двигатель, который уже давно вышел в серию, несмотря на то, что был разработан только 30 лет назад, изобретателем из Японии Кохеи Минато.

Специалисты отмечают высокий уровень бесшумности и вместе с этим, эффективность. Как утверждает его создатель, такой самовращающийся двигатель магнитного типа как этот имеет коэффициент полезного действия, выше 300%.
Конструкция подразумевает ротор в форме колеса или диска, на котором под углом размещаются магниты. При приближении к ним статора с крупным магнитом, колесо начинает движение, которое основывается на попеременным отталкиванием/сближением полюсов. Скорость вращения будет увеличиваться по мере приближения статора к ротору.
Чтобы исключить нежелательных импульсов во время работы колеса, применяются реле стабилизаторы и уменьшают использование тока управляющего электромагнита. Есть в такой схеме и недостатки, в качестве необходимости систематического намагничивания и отсутствию информации по тяге и нагрузочным характеристикам.
Магнитный мотор Говарда Джонсона
Схема этого изобретения от Говарда Джонсона, подразумевает использование энергии, что создается благодаря потоку непарных электронов, которые имеются в магнитах, для создания цепи питания силового агрегата. Схема устройства выглядит, как совокупность большого количества магнитов, особенность расположения которых, определяется исходя из конструктивной особенности.

Магниты располагаются на отдельной пластине, с высоким уровнем магнитной проводимости. Одинаковые полюса располагаются по направлению к ротору. Благодаря этому обеспечивается попеременное отталкивание/притяжение полюсов, а при этом и смещение частей ротора и статора относительно друг друга.
Правильно подобранное расстояние между основными работающими частями, позволяет правильным образом выбирать магнитную концентрацию, благодаря чему удастся выбирать силу взаимодействия.
Генератор Перендева
Генератор Перендева представляет собой очередное удачное взаимодействие магнитных сил. Это изобретение Майка Брэди, которое он даже успел запатентовать и создать компанию «Перендев», до того, как на него открыли уголовное дело.

Статор и ротор выполнены в форме внешнего кольца и диска. Как видно из схемы, предоставленной в патенте, на них по круговой траектории располагают отдельные магниты, четко соблюдая определенный угол по отношению к центральной оси. Благодаря взаимодействию полей магнитов ротора и статора, происходит их вращение. Расчет цепи магнитов сводится к определению угла расхождения.
Синхронный двигатель на постоянных магнитах
Синхронный двигатель на постоянных частотах представляет собой основной вид электродвигателя, где частоты вращения ротора и статора находятся на одинаковом уровне. Классический электромагнитный силовой агрегат имеет обмотки на пластинах, но если сменить конструкцию якоря и вместо катушки установить постоянные магниты, тогда получится достаточно эффективная модель синхронного силового агрегата.

Схема статора имеет классическую компоновку магнитопровода, куда входят обмотка и пластины, где и скапливается магнитное поле электротока. Это поле взаимодействует с постоянным полем ротора, что и создает крутящий момент.
Помимо всего прочего, необходимо учесть, что исходя из конкретного типа схемы, расположение якоря и статора могут быть изменены, так например первый, может быть сделан в виде внешней оболочки. Для активации мотора от тока сети, применяется цепь магнитного пускателя и теплового защитного реле.
Как собрать двигатель самостоятельно
Не менее популярными являются и самодельные варианты таких устройств. Они достаточно часто встречаются на просторах интернета не только в качестве рабочих схем, но и конкретно выполненных и работающих агрегатов.

Один из самых простых в создании в домашних условиях устройств, создается с использованием 3 соединенных между собой валов, которые скреплены таким методом, чтобы центральный, был повернут на те, что находятся по сторонам.
В центр того вала, что посередине, прикрепляется диск из люцита, диаметром в 4 дюйма, а толщиной в 0,5 дюймов. Те валы, которые располагаются по сторонам, также имеют диски на 2 дюйма, на которых располагаются магниты по 4 штуки на каждом, а на центральном вдвое больше – 8 штук.
Ось обязательно должна находиться по отношению валов в параллельной плоскости. Концы возле колес проходят с проблеском в 1 минуту. В случае если начать перемещать колеса, тогда концы магнитной оси начнут синхронизироваться. Чтобы придать ускорения, необходимо поставить в основание устройства брусок из алюминия. Один его конец должен немного касаться магнитных деталей. Как только усовершенствовать конструкцию таким образом, агрегат будет вращаться быстрее, на пол оборота в 1 секунду.
Приводы были установлены так, чтобы валы вращались аналогично друг другу. В случае если на систему попробовать воздействовать пальцем или каким-то другим предметом, тогда она остановится.
Руководствуясь такой схемой, можно своими силами создать магнитный агрегат.
Какие достоинства и недостатки имеют реально работающие магнитные двигатели

Среди преимуществ таких агрегатов, можно отметить следующие:
- Полная автономность с максимальной экономией топлива.
- Мощное устройство с использованием магнитов, может обеспечивать помещение энергией в 10 кВт и более.
- Такой двигатель работает до полного эксплуатационного износа.
Пока что, не лишены такие двигатели и недостатков:
- Магнитное поле может отрицательным образом влиять на человеческое здоровье и самочувствие.
- Большое количество моделей не может эффективно работать в бытовых условиях.
- Есть небольшие сложности в подключении даже готового агрегата.
- Стоимость таких двигателей достаточно велика.
Такие агрегаты уже давно не являются вымыслом и в скором времени вполне смогут заменить привычные силовые агрегаты. На данный момент, они не могут составить конкуренцию привычным двигателям, но потенциал к развитию имеется.