
скорость- Скорость вращения двигателя и ее влияние на электроинструмент
Скорость без нагрузки — это максимальная скорость, которую может достичь электроинструменты таких как шуруповерты без нагрузки. Производители указывают скорость инструмента на холостом ходу, потому что, как только шуруповерт начнет забивать винты или сверлить, ее максимальная скорость будет варьироваться в зависимости от того, насколько сложной является задача.
При эксплуации, контроле, ремонте или замене двигателя важно знать его технические характеристики. Одним из важнейших измерений является количество оборотов в минуту, которое описывает скорость двигателя. В этой статье мы обсудим, как рассчитать количество вращения двигателя и почему это так важно.
высокая и низкая скоростьэлектроинструментов
🔸 Обороты В минуту
Одной из наиболее важных особенностей электродвигателей постоянного тока является скорость вращения. Показывается это в электроинструментах с показателем обо/мин. На самом деле это количесво обороов насадок в электроинструментов. Польный цикл вращения – это когда вращается вал двигателя поварачивается на 360˚. Количество оборотов на 360˚, или оборотов , которые двигатель соверщает за минуту.
На самом деле это количесво обороов насадок в электроинструментов. Польный цикл вращения – это когда вращается вал двигателя поварачивается на 360˚. Количество оборотов на 360˚, или оборотов , которые двигатель соверщает за минуту.
Таким образом, двигатель с количеством вращения 24 000 об/мин имеет гораздо более высокую скорость, чем двигатель с количеством вращения 2400 об/мин. Скорость вращения важна, если вы хотели, чтобы двигатель вращался определенное количество раз за определенный период времени. Обороты в минуту являются решающим фактором, на котором следует обратить внимание при выборе двигателя.
при необходимости выполнения тяжелых задач, обязательно важно выбирать двигатели с высокими оборотами. Это может включать такие приложения, как стиральные машины с высокоскоростными циклами полоскания, беговые дорожки, которые достигают высоких скоростей, и любые подобные приложения.
мало оборотов достаточно для сверления на деревеОбычно, когда указывается значение оборотов в минуту для двигателя, оно обычно задается с напряжением, которое позволит ему совершать такое количество оборотов в минуту, например 2400 об/мин при 3 В. Таким образом, двигатель будет вращаться 2400 раз в минуту при подаче в него 3 вольт постоянного тока.
Таким образом, двигатель будет вращаться 2400 раз в минуту при подаче в него 3 вольт постоянного тока.
🔸 Скорость без нагрузки
Скорость холостого хода двигателя постоянного тока — это скорость, с которой двигатель постоянного тока будет вращаться, когда к его валу ничего не прикреплено. Вот почему это называется без нагрузки. Двигатель постоянного тока не загружен каким-либо предметом.
Когда двигатель постоянного тока не имеет ничего прикрепленного к своему валу, он может работать с максимальной скоростью. Когда он затем будет загружен каким-либо предметом на своем валу, его скорость уменьшится. Это происходит потому, что теперь ему приходится выдерживать вес предмета на нем.
Скорость холостого хода служит показателем того, с какой скоростью будет вращаться вал двигателя до того, как к нему добавится вес. Таким образом, проектировщик схем может иметь систему отсчета.
Значение оборотов двигателя, которое будет указано, обычно будет скоростью без нагрузки.
При эксплуатации, контроле, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важнейших измерений является число оборотов в минуту, или оборотов в минуту, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать частоту вращения двигателя и почему это так важно.
🔸 От чего зависит скорость ?
Как внедрение двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как это происходит с двигателями переменного тока. Несколько других факторов влияют на скорость в двигателях постоянного тока, включая рабочее напряжение двигателя, силу магнитов и количество витков провода, которые имеет якорь. Двигатели постоянного тока могут работать только на скоростях, рассчитанных на величину доступного для них напряжения.
больше оборотов для тяжелых работЕсли батарея, на которой работает двигатель, начнет разряжаться и подавать меньшее напряжение, скорость двигателя уменьшится. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может привести к дополнительному износу двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает за счет изменения напряжения, доступного для двигателя.
Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может привести к дополнительному износу двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает за счет изменения напряжения, доступного для двигателя.
FAQ❓
⚪ Зависит ли скорость вращения от муфта?
Нет. Но когда сверлим плотные заготовки, надо регулировать крутящего момента на макимум и таким образом скорость понижается.
⚪ Как можно регулировать скорость в дрелей?
Обычно в дрелей является диммер, с помощью которого можно регулировать количество оборотов на желаемую скорость.
⚪ Какой двигатель лучше для дрелей? Щеточные или бесщеточные?
Конечно бесщеточные двигатели обладают более преимуществами, но они дороже.
Раздел недели: Плоские фигуры. Свойства, стороны, углы, признаки, периметры, равенства, подобия, хорды, секторы, площади и т.д. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Поиск на сайте DPVA Поставщики оборудования Полезные ссылки О проекте Обратная связь Ответы на вопросы. Оглавление Таблицы DPVA.ru — Инженерный Справочник | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Коды баннеров проекта DPVA.ru Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.
Free xml sitemap generator Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.
Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Все о частотных преобразователях
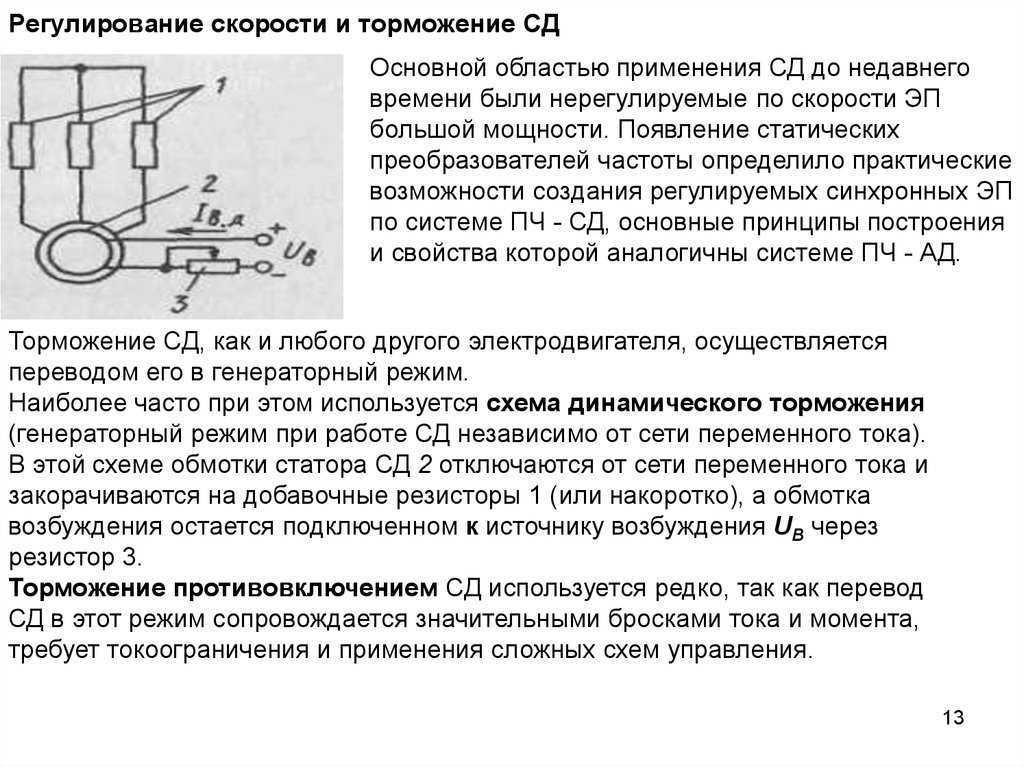
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения.
 Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения. - — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно.
 Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.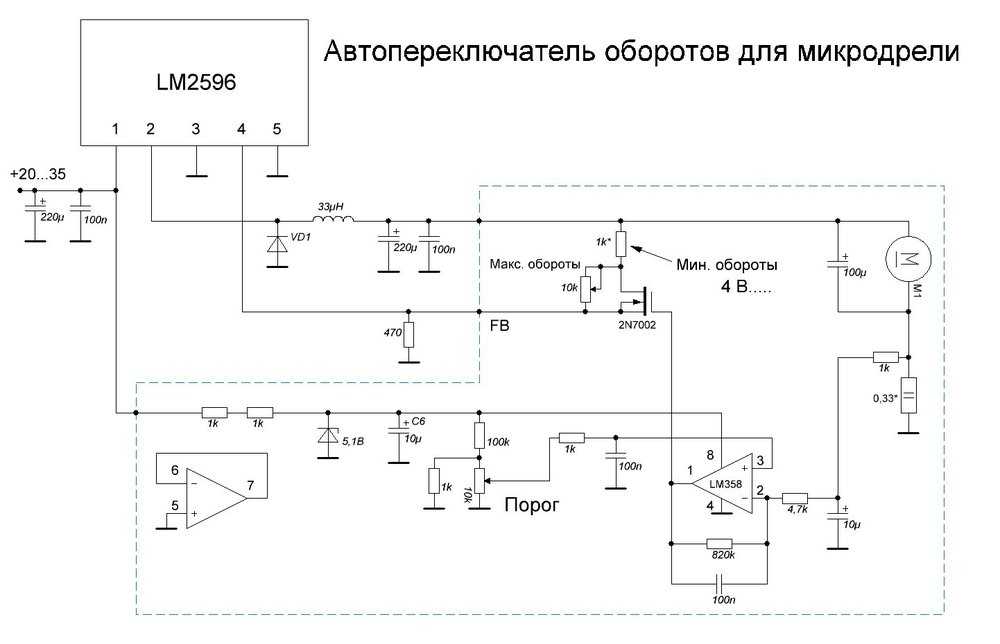
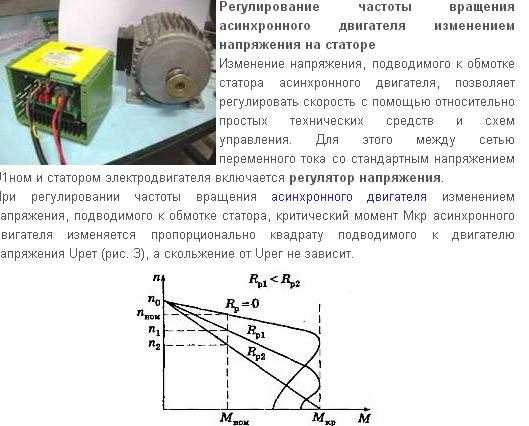
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту.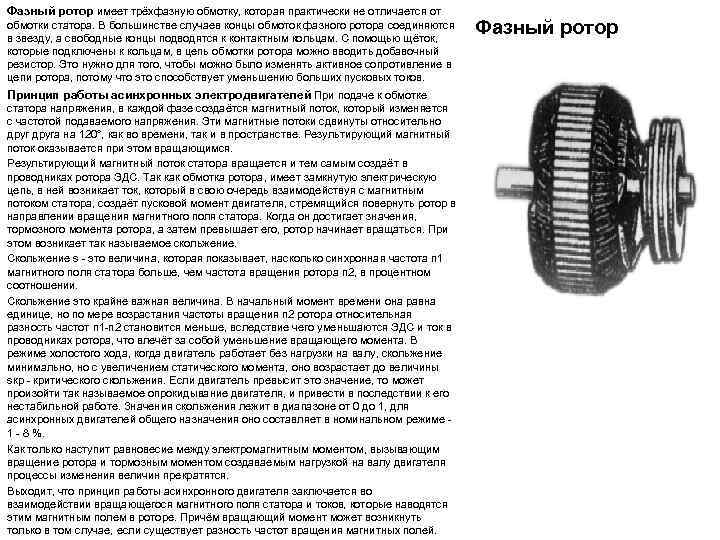 Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления | Торцевые уплотнения, причины выхода со строя в насосах →
Как определить скорость вращения двигателя постоянного тока
Содержание
- Частота вращения: формула
- Синхронные и асинхронные электромашины
- Синхронная скорость
- Скольжение
- Регулировка частоты вращения
- Двигатели постоянного тока
- Номинальная скорость вращения
- Регулировка скорости
- Видео
- Регулирование скорости оборотов двигателя постоянного тока
- Методы регулировки
- Заключение
- Основные уравнения двигателя постоянного тока (ДПТ)
- Противо ЭДС двигателя Eя
- Ток якоря Iя
- Частота вращения якоря
- Электромагнитная мощность двигателя
- Электромагнитный момент
- Как определить скорость вращения электродвигателя
- Электрический двигатель постоянного тока
- Устройство и описание ДПТ
- Статор (индуктор)
- Ротор (якорь)
- Коллектор
- Принцип работы
- Типы ДПТ
- По наличию щеточно-коллекторного узла
- По виду конструкции магнитной системы статора
- Управление
- Механическая характеристика
- Регулировочная характеристика
- Области применения
- Преимущества и недостатки
- Видео в дополнение к написанному
- Видео
Частота вращения: формула
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока.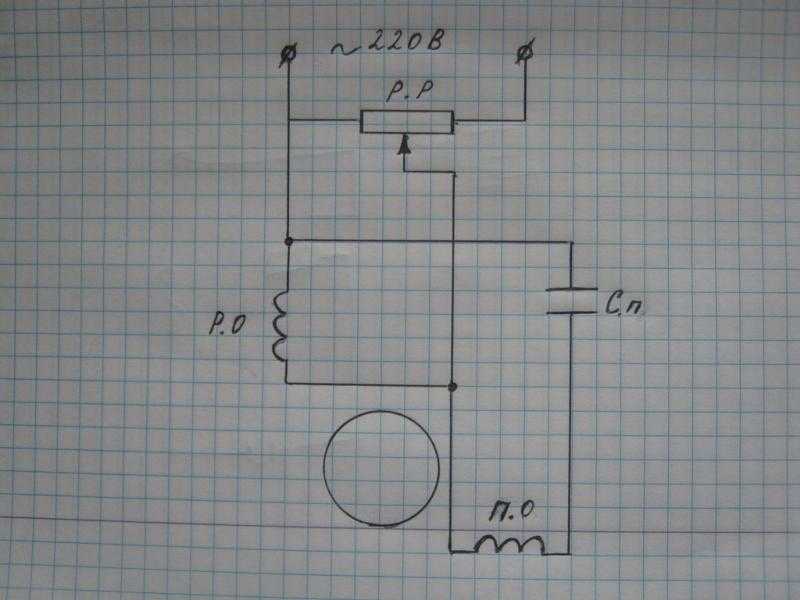 Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.
Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.
Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Основные уравнения двигателя постоянного тока (ДПТ)
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя
EяПри вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
Ток якоря
IяВыразим из формулы 2 ток якоря.
Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.
Электромагнитная мощность двигателя
Электромагнитный момент
где: ω = 2*π*f — угловая скорость вращения якоря, Cм— постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)
Момент на валу двигателя, т.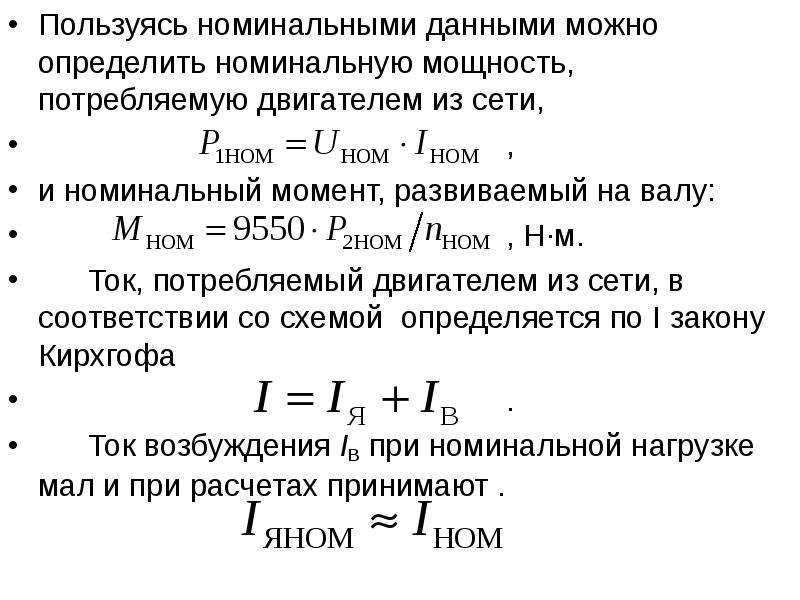 е. полезный момент, где М0 момент холостого хода;
е. полезный момент, где М0 момент холостого хода;
Источник
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
3000 оборотов в минуту
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Источник
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора.
 В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
К достоинствам относится:
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Источник
Видео
Регулирование частоты вращения двигателей постоянного тока
Как определить скорость вращения вала электродвигателя и его мощность.
Как определить мощность, частоту вращения, двигателя без бирки или шильдика самому и просто
Регулируем скорость вращения двигателя постоянного тока для игрушек
Схема двигателя постоянного тока. Устройство и принцип работы.
КАК УЗНАТЬ ОБОРОТЫ ПРИ ПОМОЩИ ТЕЛЕФОНА.
Как определить обороты электродвигателя
Электродвигатель постоянного тока. Принцип работы.
Что лучше использовать для регулировки скорости вращения двигателя, ШИМ или регулятор напряжения
Способы регулирования частоты вращения якоря машины постоянного тока
Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов.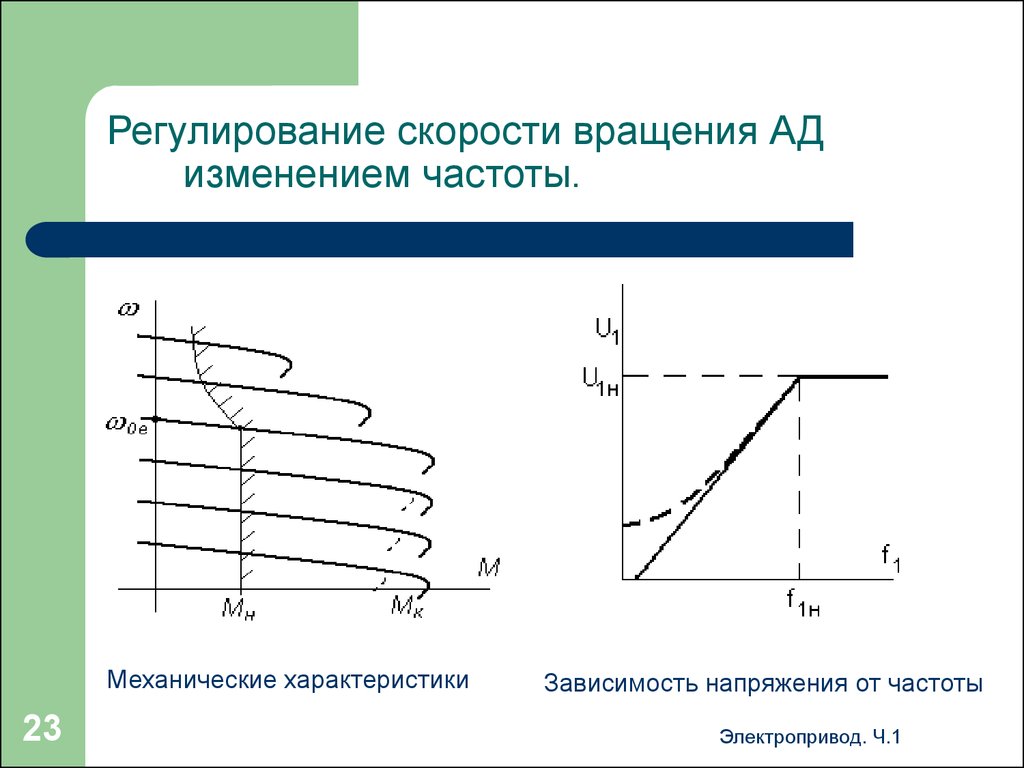 При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”.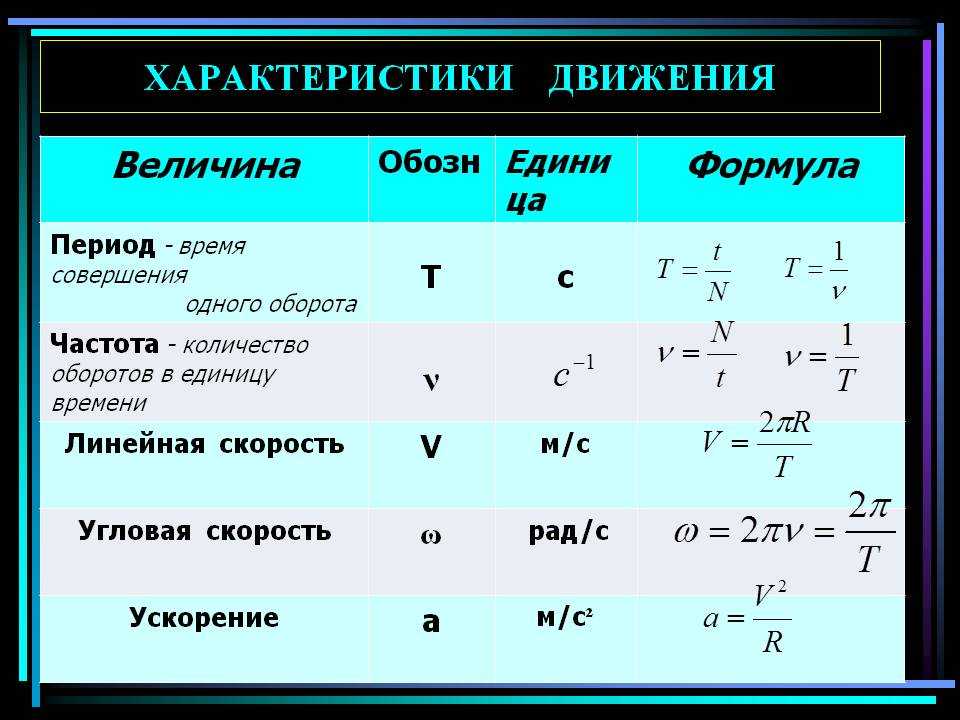 Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Как определить скорость вращения электродвигателя
Содержание
- Как обслуживать частотные преобразователи?
- Экономическое обоснование эффекта от инвертора
- Для чего необходимо знать мощность двигателя
- Корректируем обороты
- Определяем обороты
- Двигатели постоянного тока
- Номинальная скорость вращения
- Регулировка скорости
- Как определить мощность асинхронного электродвигателя.
- Синхронные и асинхронные электромашины
- Синхронная скорость
- Скольжение
- Регулировка частоты вращения
- Практические измерения
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Способы определения характеристик электромотора.
- Как изменить скорость работы двигателя?
- Что такое шпиндель
- Влияние скорости вращения шпинделя жесткого диска
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
 Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
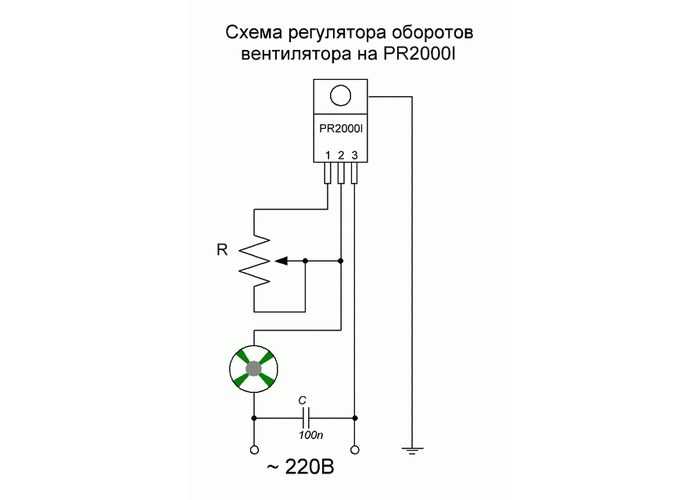
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.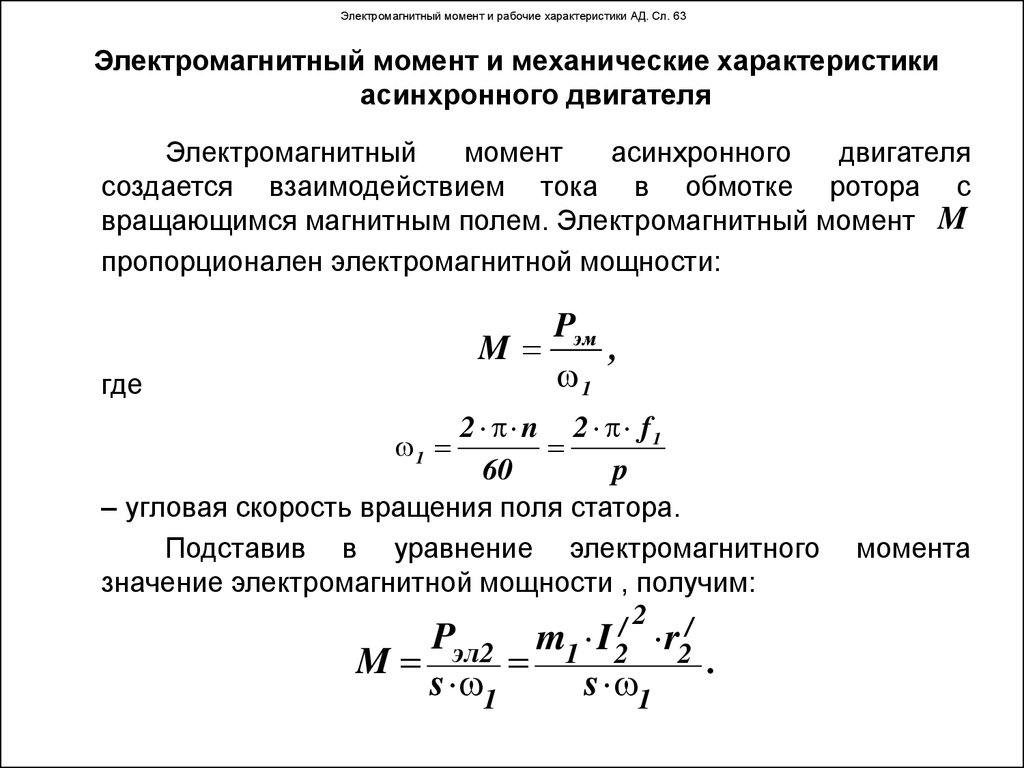
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой.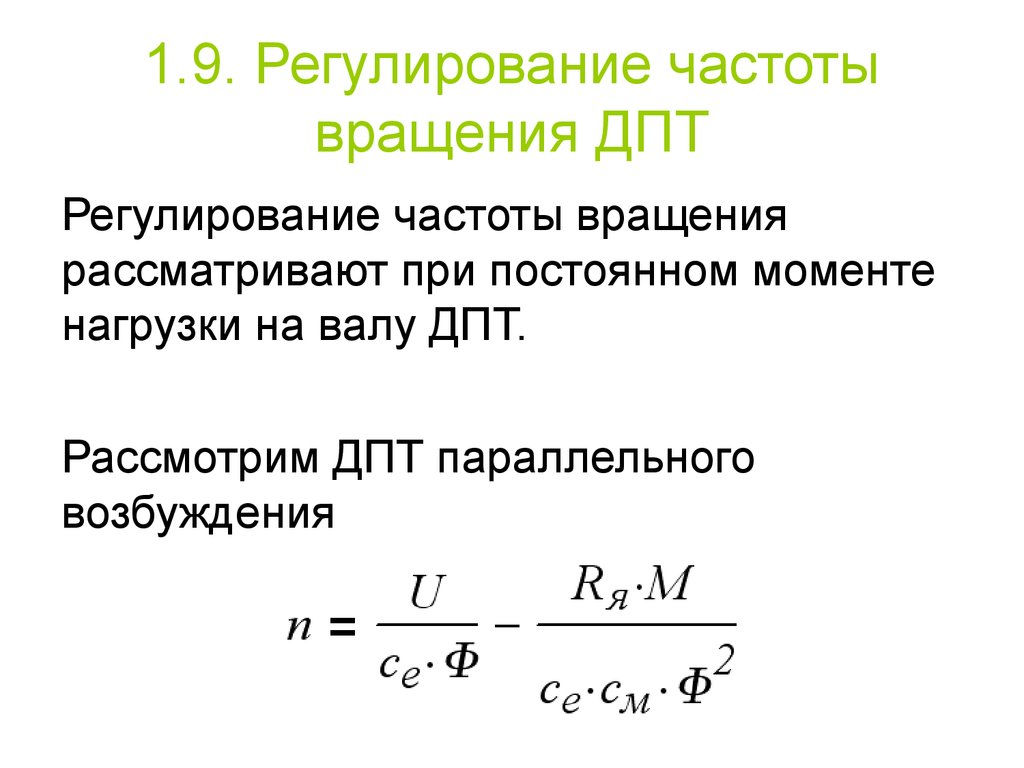 И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л.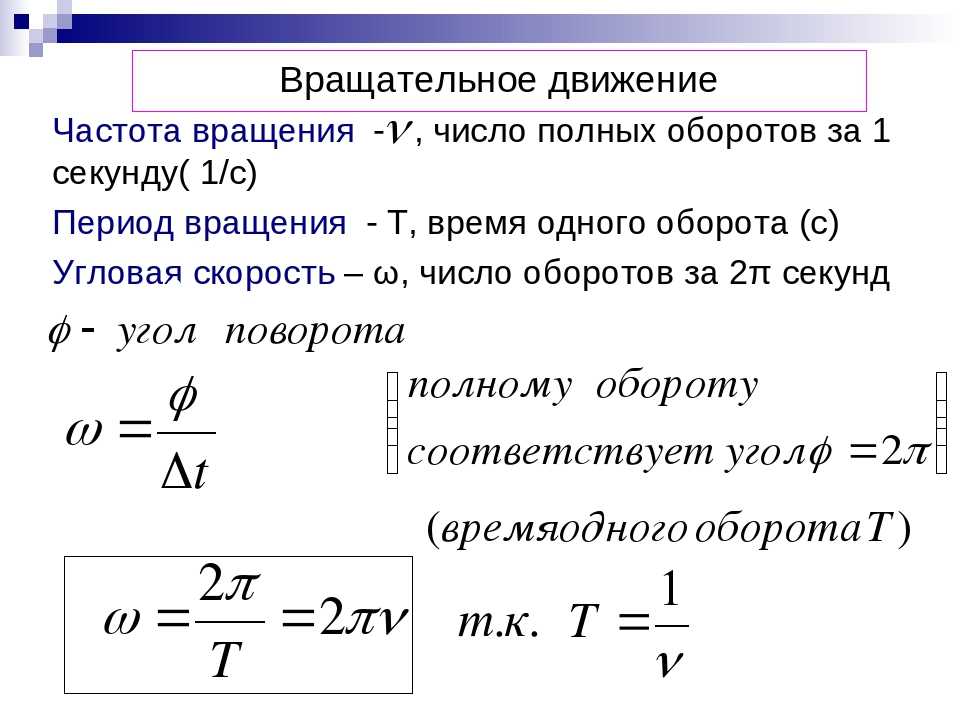 Рыженков
Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S».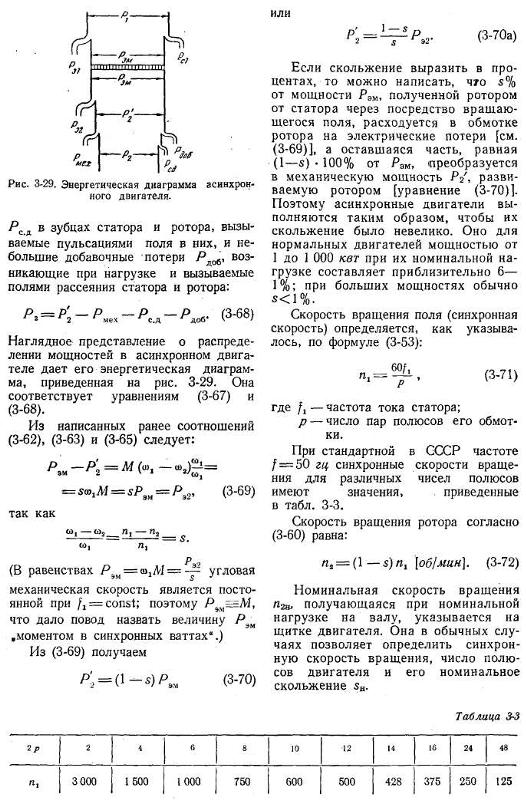 Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
 При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений; Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части.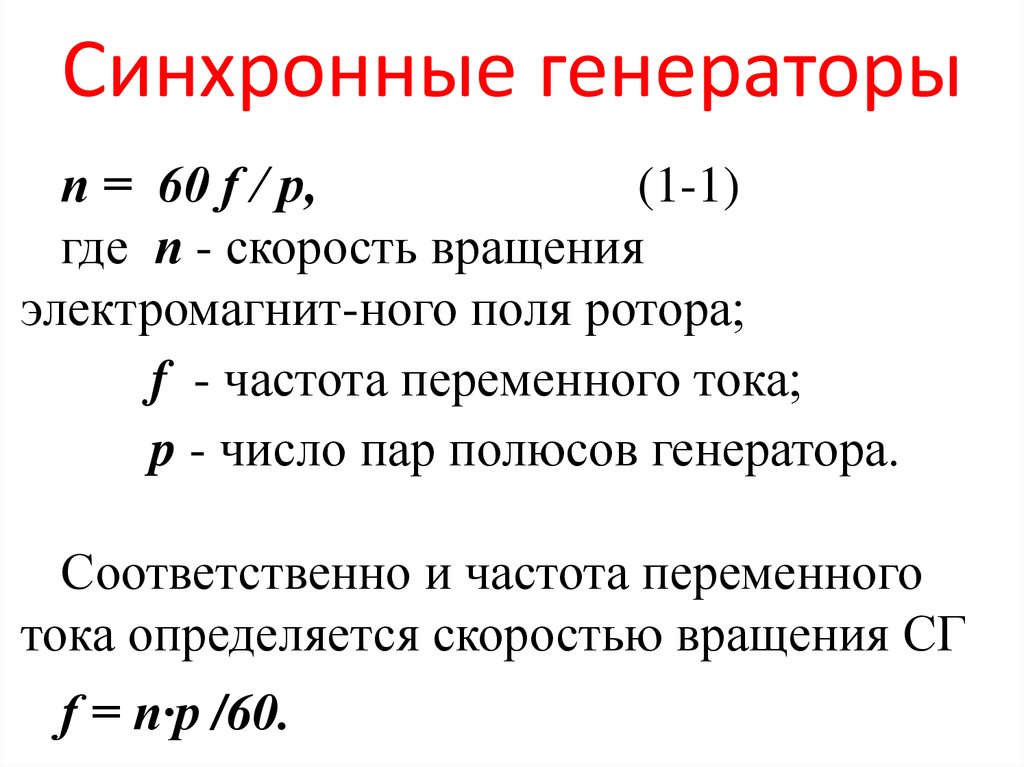 Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.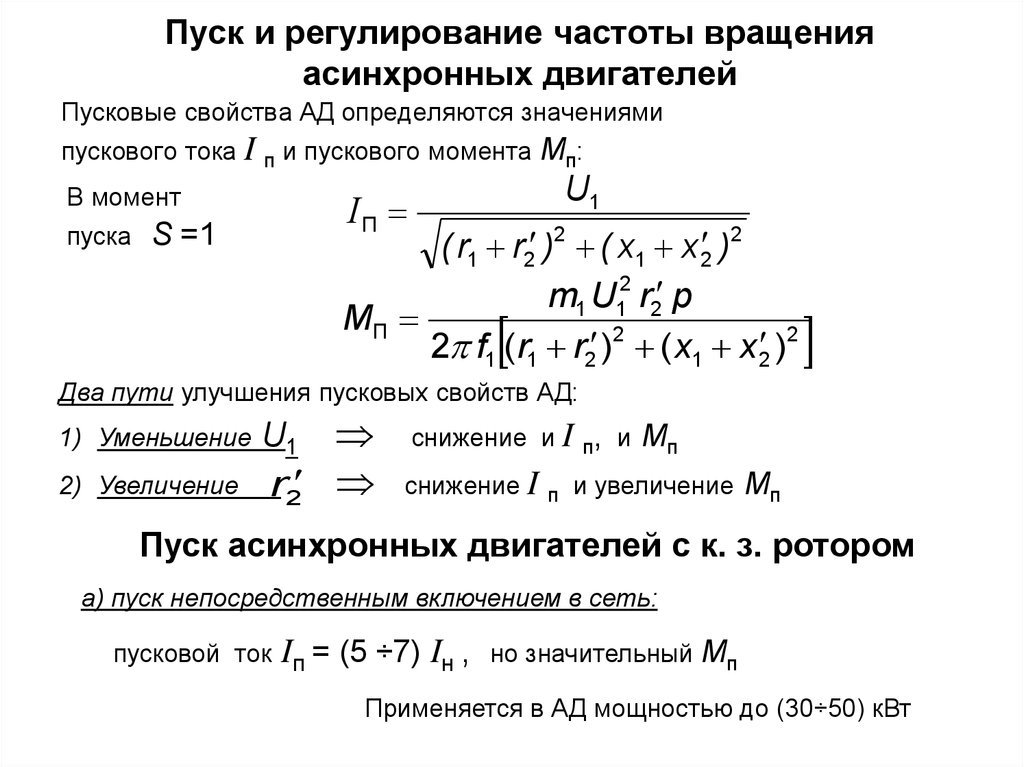
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
 Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.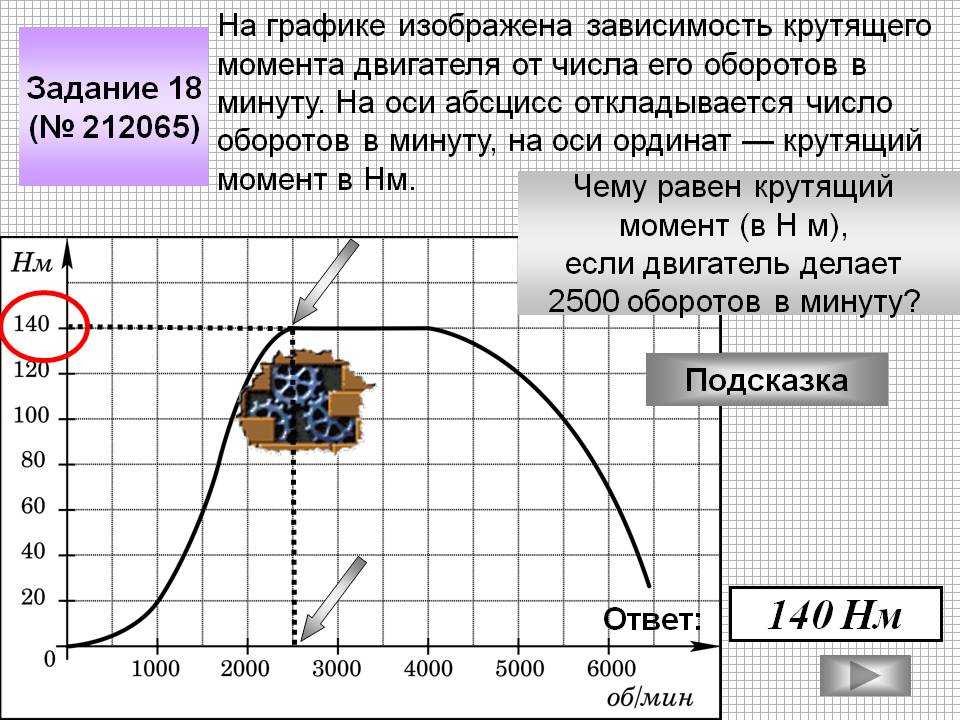
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.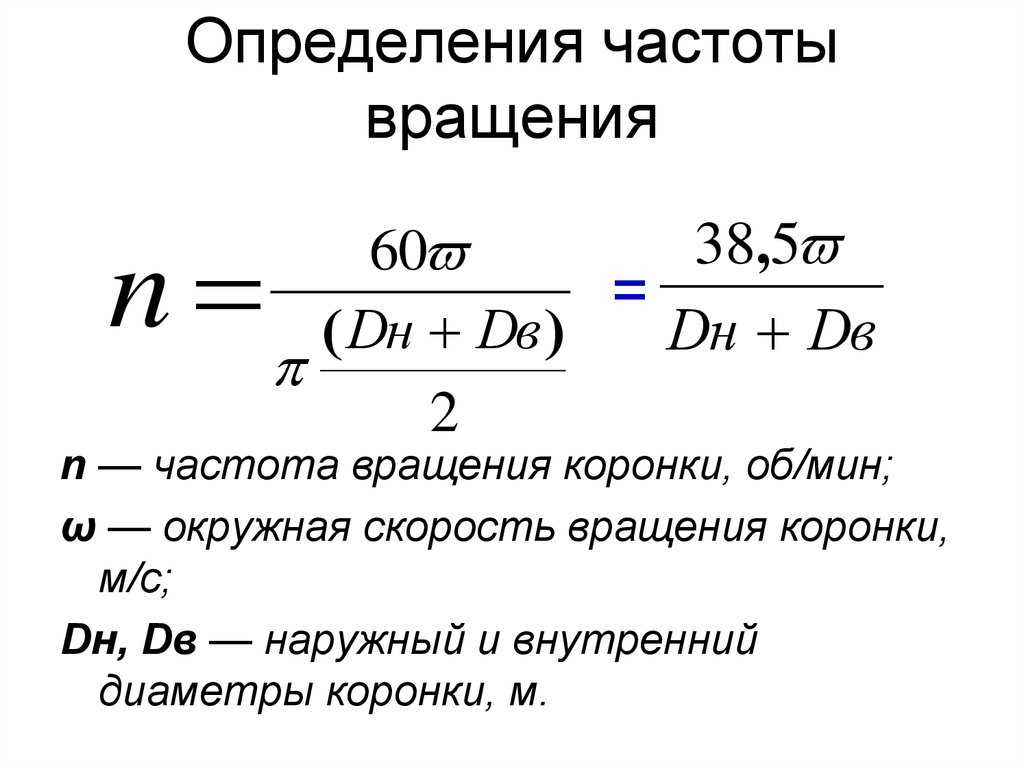
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе.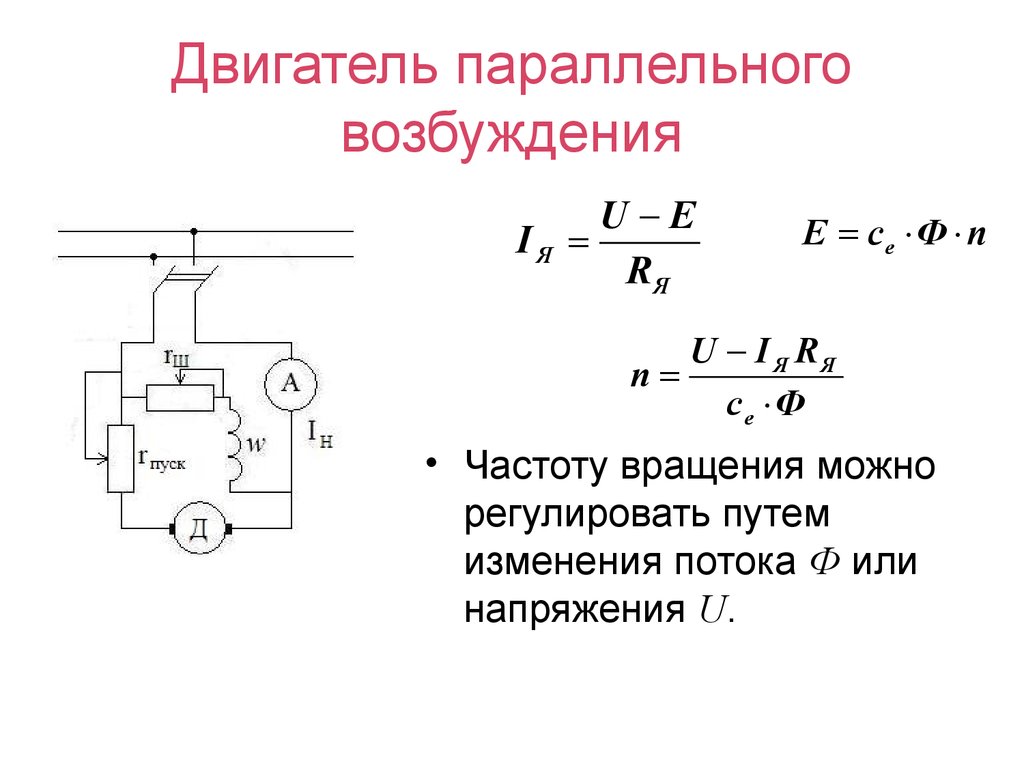 Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
Как рассчитать скорость колеса и автомобиля по частоте вращения двигателя – x-engineer.org
Скорость автомобиля и колеса можно рассчитать как функцию частоты вращения двигателя, если известны параметры и состояние трансмиссии. В этом уроке мы собираемся рассчитать скорость автомобиля и колеса для заданного:
- оборотов двигателя
- передаточное число (включенной передачи)
- передаточное число главной передачи (на дифференциале)
- (свободное статическое) колесо радиус
Кроме того, мы предполагаем, что сцепление или гидротрансформатор не проскальзывают, поскольку двигатель механически связан с колесами.
Этот метод может быть применен к любой архитектуре трансмиссии (переднеприводной или заднеприводной), но для более легкого понимания компонентов мы будем использовать трансмиссию с полным приводом (RWD).
Изображение: Схема продольной передачи автомобиля – расчет скорости
где:
ω e [рад/с] – частота вращения двигателя
ω g [рад/с] – частота вращения выходного вала коробки передач
ω d [рад/с] – частота вращения венца дифференциала
? скорость левого колеса
v wr [м/с] – линейная скорость правого колеса
i x [-] – передаточное число включенной передачи
i 0 [-] – передаточное число дифференциала
r w [м] – статический радиус колеса
Для простоты расчета предположим, что автомобиль движется прямолинейно, а также что оба колеса имеют одинаковый радиус.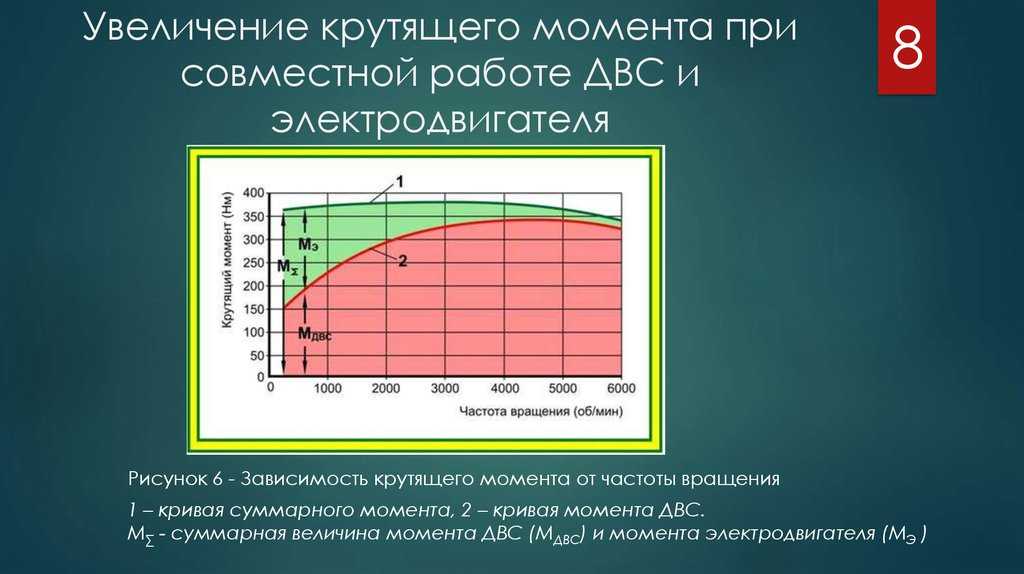 Это означает, что:
Это означает, что:
\[\omega_{wr}=\omega_{wl}=\omega_{w} \tag{1}\]
где ω w [рад/с] — скорость вращения общего колеса.
Поскольку транспортное средство и колесо движутся вместе в линейном направлении, скорость транспортного средства (линейная) равна линейной скорости колеса. Так что, если мы посчитаем линейную скорость колеса, мы также получим скорость автомобиля.
\[v_{wr}=v_{wl}=v_{w}=v_{v} \tag{2}\]
Где v w [м/с] — линейная скорость общего колеса и v v [м/с] — скорость автомобиля.
Так как коробка передач связана с двигателем через сцепление (на МКПП) или гидротрансформатор (на АКПП), мы считаем, что проскальзывание ни в муфте (полностью замкнутой), ни в гидротрансформаторе абсолютно отсутствует ( блокировочная муфта замкнута). В этом случае скорость сцепления ω c [рад/с] равна частоте вращения двигателя ω e [рад/с] .
\[\omega_{c} = \omega_{e} \tag{3}\]
Изображение: Схема продольной передачи автомобиля – расчет скорости
В отличие от расчета крутящего момента колеса, передаточное число будет уменьшать скорость вращения колеса. Скорость выходного вала коробки передач равна скорости сцепления, деленной на передаточное число:
\[\omega_{g} = \frac{\omega_{c}}{i_{x}} \tag{4}\ ]
Скорость вращения венца дифференциала также уменьшается, будучи равной частоте вращения выходного вала редуктора, деленной на передаточное число дифференциала:
\[\omega_{d} = \frac{\omega_{g}}{i_{ 0}} \tag{5}\]
Скорости левого и правого колеса равны с дифференциальной скоростью:
\[\omega_{wr}=\omega_{wl}=\omega_{d} \tag{6}\]
Объединение всех приведенных выше уравнений дает формулу для зависимости скорости вращения колеса от частоты вращения двигателя:
\[ \omega_{w} = \frac{\omega_{e}}{i_{x} \cdot i_{0}} \tag{7}\]
Для частоты вращения двигателя преобразование из об/мин в рад/ s выполняется следующим образом:
\[\omega_{e} = \frac{N_{e} \cdot \pi}{30} \tag{8}\]
Где N e — частота вращения двигателя в [об/мин] .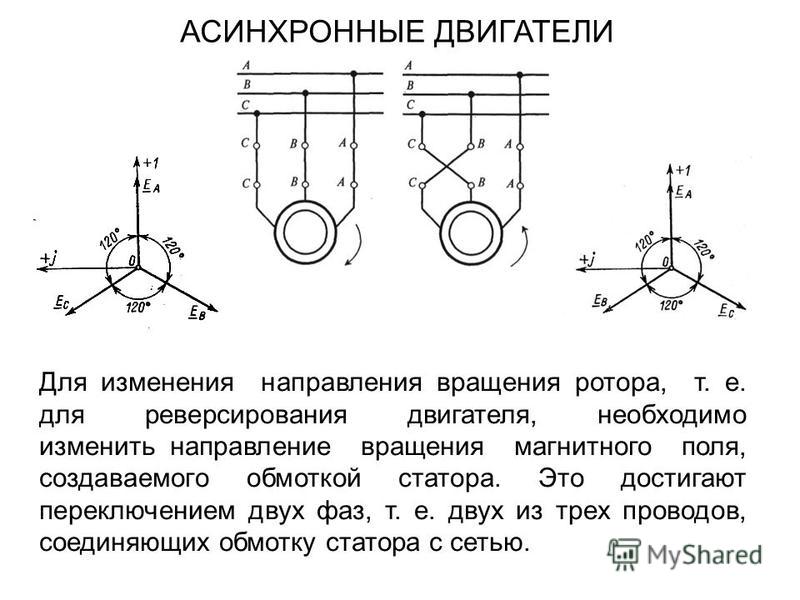
Если нам нужна скорость колеса N w in [об/мин] , из [рад/с] , нам нужно применить обратное преобразование:
\[N_{w} = \frac{ \omega_{w} \cdot 30}{\pi} \tag{9}\]
Кроме того, линейная скорость колеса рассчитывается как функция скорости вращения и радиуса как:
\[v_{w} = \omega_{ w} \cdot r_{w} \tag{10}\]
Объединение уравнений (7), (8) и (10) дает выражение функции скорости автомобиля и колеса от частоты вращения двигателя и коробки передач и передаточных чисел дифференциала :
\[v_{v} \text{ [м/с]} = v_{w} \text{ [м/с]} = \frac{N_{e} \cdot \pi \cdot r_{w}} {30 \cdot i_{x} \cdot i_{0}} \tag{11}\]
Если мы хотим получить скорость в [км/ч] , формула будет выглядеть так:
\[\bbox[# FFFF9D]{V_{v} \text{ [км/ч]} = V_{w} \text{ [км/ч]} = \frac{3.6 \cdot N_{e} \cdot \pi \cdot r_{w}}{30 \cdot i_{x} \cdot i_{0}}} \tag{12}\]
Пример 1 .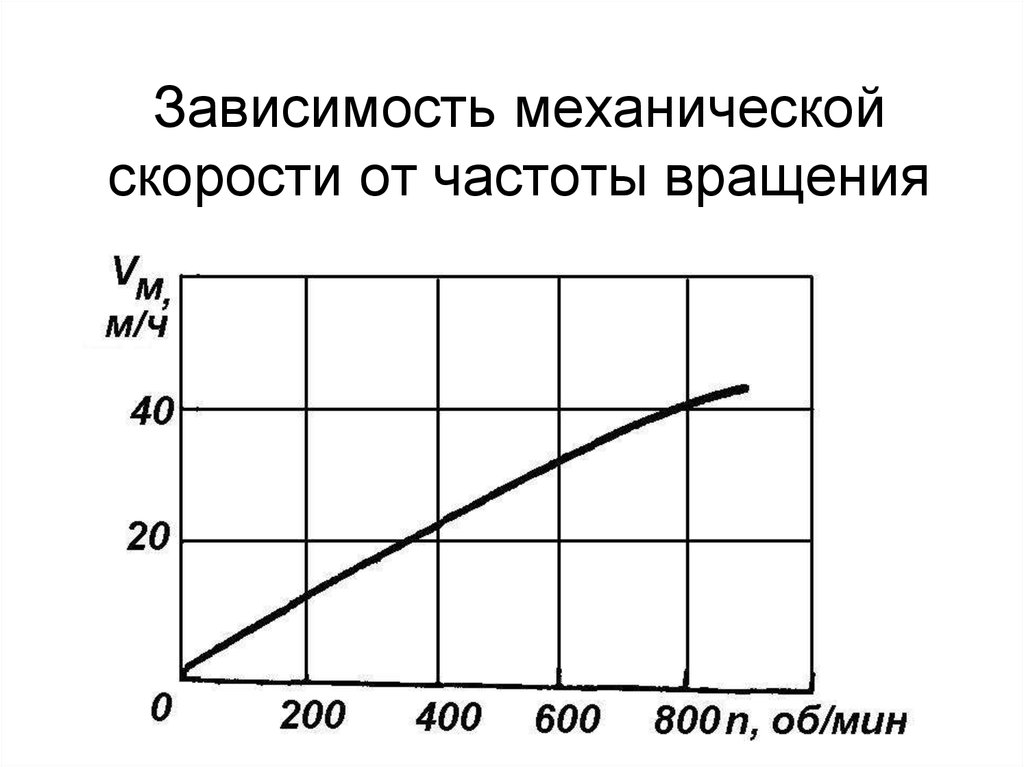 Рассчитайте скорость автомобиля в [км/ч] для автомобиля со следующими параметрами:
Рассчитайте скорость автомобиля в [км/ч] для автомобиля со следующими параметрами:
- engine speed, N e = 2300 rpm
- gearbox (1 st ) gear ratio, i x = 4.171
- final drive ratio, i 0 = 3.460
- Маркировка размера шин 225/55R17
Шаг 1 . Рассчитайте (свободный статический) радиус колеса по маркировке размера шины. Способ расчета радиуса колеса описан в статье Как рассчитать радиус колеса. Расчетный радиус колеса равен r w = 0,33965 м .
Шаг 2 . Рассчитайте крутящий момент колеса, используя уравнение (12).
\[V_{v} = \frac{3,6 \cdot 2300 \cdot \pi \cdot 0,33965}{30 \cdot 4,171 \cdot 3,460} = 20,4068 \text{ км/ч} \]
Можно применить тот же метод для электромобиля скорость двигателя заменяется скоростью двигателя.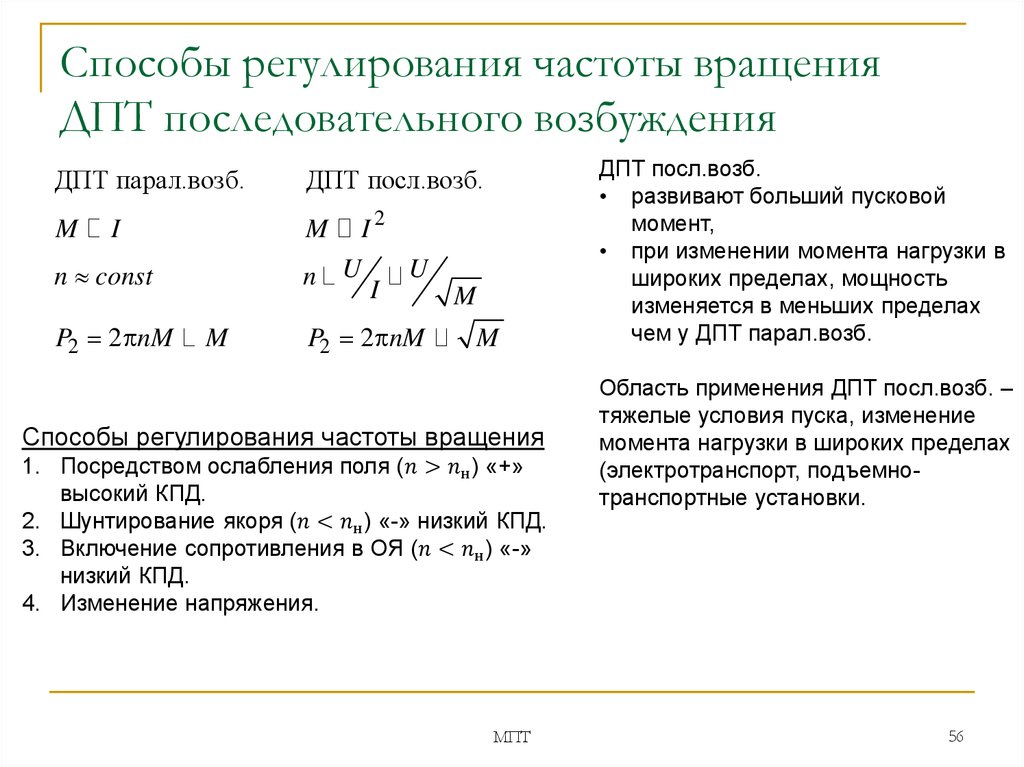
Вы также можете проверить свои результаты, используя калькулятор ниже.
| N e [об/мин] | I x [-] | I 0 [-] | R W [M] |
| 20 | 3720 | 3720 | 3720 | . |
| N w [об/мин] = | |||
| V v [км/ч] = | |||
ссылки ниже, 9026 учебники.
Концентратор оборудования: «На каких оборотах должен работать двигатель?» — Progressive Dairy
Двигатели с регулируемой частотой вращения используются почти во всех самоходных транспортных средствах и оборудовании. Правильная частота вращения двигателя, выраженная в оборотах в минуту (об/мин), будет лучшим компромиссом с точки зрения экономичности эксплуатации, выбросов, необходимой мощности (или необходимой скорости, особенно при работе с навесным оборудованием с приводом от ВОМ, например, пресс-подборщиков сена) и долговечности двигателя.
Брэд Нельсон
Перевозчик сена на пенсии
Эл.0013
Большинство тракторов текущего производства имеют тахометр, отмеченный для частоты вращения двигателя, который обеспечивает скорость 540 об/мин или 1000 об/мин для ВОМ. Скорость ВОМ не зависит от скорости трактора относительно земли.
Машины с приводом от ВОМ, за редкими исключениями, должны работать с указанной скоростью, чтобы работать должным образом.
Как правило, чем медленнее будет работать двигатель, чтобы обеспечить мощность, необходимую для выполнения задачи, тем экономичнее будет его эксплуатация. Расход топлива на час тормозной мощности (BHPH) — это термин, который используют инженеры. Расход топлива на час лошадиных сил самый низкий при перемещении чего-либо на максимальной мощности трактора для перемещения.
Поскольку большая часть срока службы трактора не работает на пределе возможностей, эта мера расхода топлива может не применяться к реальному использованию на ферме. Двигатели работают на динамометрах, чтобы увидеть и записать крутящий момент и мощность, возможные во всем диапазоне рабочих оборотов двигателя. Это должно быть очевидно: если для выполнения задачи требуется 50 лошадиных сил (без частоты вращения ВОМ), машина или транспортное средство будут потреблять больше топлива, если они работают на частоте вращения двигателя (об/мин), необходимой для выработки 300 лошадиных сил.
Двигатели работают на динамометрах, чтобы увидеть и записать крутящий момент и мощность, возможные во всем диапазоне рабочих оборотов двигателя. Это должно быть очевидно: если для выполнения задачи требуется 50 лошадиных сил (без частоты вращения ВОМ), машина или транспортное средство будут потреблять больше топлива, если они работают на частоте вращения двигателя (об/мин), необходимой для выработки 300 лошадиных сил.
Тахометр на большинстве оборудования будет показывать диапазон рабочей скорости с цветовой кодировкой. Зеленый – счастливое место. Желтый или оранжевый, расположенный ниже или выше зеленого, — это область «не очень хорошая идея». Красный, обычно над желтым или оранжевым, — это область «у нас будут проблемы».
Давайте немного окунемся в историю. В 1966 году двигатели большегрузных автомобилей «загорались» или «отсоединялись» при 2100 об/мин. Большинство из них имели предпочтительный рабочий диапазон около 300 об/мин, поэтому план вождения заключался в том, чтобы запустить двигатель до 2100 об/мин, затем переключиться на повышенную передачу, надеясь, что он перейдет на следующую передачу с частотой вращения двигателя, близкой к 1800 об/мин.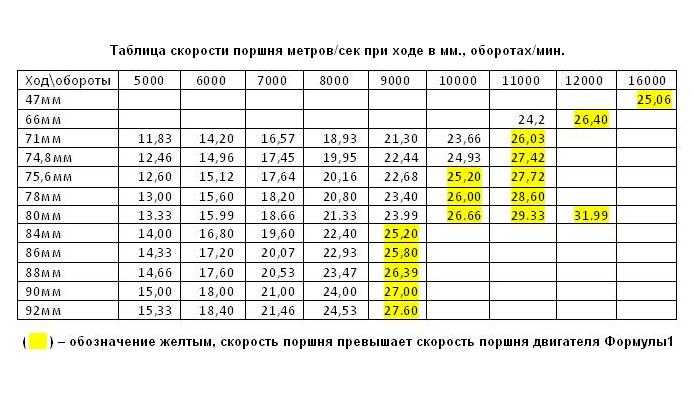
При подъеме в гору и потере скорости переключение на пониженную передачу будет производиться примерно на 1900 об/мин, что позволит немного снизить обороты двигателя на время, необходимое для переключения, и по-прежнему оставаться под нагрузкой как раз в диапазоне 2100 об/мин. Если бы это поколение двигателей работало медленнее, чем рекомендуемый диапазон от 1800 до 2100 об / мин на полной мощности, как температура охлаждающей жидкости, так и температура внутреннего сгорания поднялись бы до точки, вызывающей катастрофический отказ двигателя.
В 1966 году компания Mack представила серию двигателей Maxidyne; 2100 оборотов в минуту по-прежнему были регулируемыми, но эти двигатели снижали скорость до 1200 оборотов в минуту, прежде чем их нужно было переключать на пониженную передачу. С измененным распределительным валом и моментом впрыска топлива эти двигатели работали как при 1200 об/мин, так и при 2100 об/мин. Это снизило среднюю скорость двигателя и показало очень заметное увеличение расхода топлива.
Первоначальный 237-сильный двигатель превзошел по тяге 318-сильный двигатель конкурента на подъемах по шоссе. У Maxidyne был почти вдвое больший крутящий момент.
Современные тяжелые дизельные двигатели для шоссейных дорог обычно работают на скорости от 1200 до 1450 об/мин и регулируются до 1800 об/мин.
Когда-то звук выхлопа говорил оператору, как сильно работает трактор. Вы могли сказать, когда ваш сосед попал в тяжелое глинистое пятно на своем поле, когда дисковал на своем двухцилиндровом тракторе John Deere. Дроссельная заслонка задавала скорость двигателя, а пружины в рычажном механизме открывали дроссельную заслонку, чтобы поддерживать ее.
Классическое «хлоп-поп-поп-поп» выхлопа сменилось на «поп-поп-поп-поп-поп-поп-поп, пу-пау-пау-пау-пау», а затем стихло до нормального, когда глиняное пятно было пройдено.
Хороший оператор может читать поле и чувствовать мощность трактора и никогда не застрять и не заглушить двигатель.
По мере того, как компьютер стал более или менее домашним, сельскохозяйственное и дорожное оборудование изменилось. Выбросы и EPA потребовали изменений в работе двигателей. Все больше и больше регулировок и настроек становятся защищенными от несанкционированного доступа.
Выбросы и EPA потребовали изменений в работе двигателей. Все больше и больше регулировок и настроек становятся защищенными от несанкционированного доступа.
Положительный момент: когда оборудование работает в «зеленом» диапазоне оборотов, оно должно быть защищено от идиотов. Теперь компьютер следит за внутренней температурой и изменяет подачу топлива и синхронизацию, чтобы сохранить дорогостоящие детали внутри двигателя. Но точно так же, как GPS работает лучше, если водитель время от времени смотрит в окно, компьютеризированные грузовики, тракторы и пикапы работают лучше, когда опытный оператор смотрит на местность, тип почвы и холмы впереди, а затем добавляет данные, полученные с помощью мозгового расчета. .
Если то, что вы проезжаете по полю, делает то, что вы хотите, и скорость вашего двигателя находится в средней трети зеленого диапазона, вы, вероятно, находитесь на таких оборотах, при которых ваш двигатель работает нормально. Это даст ему возможность замедляться, когда вы наезжаете на трудное или подъемное место, не нагружая двигатель, когда его просят работать на полном газу при слишком низких оборотах. Он также будет работать на скорости меньше, чем «настолько, насколько это возможно», и будет экономить на топливе.
Он также будет работать на скорости меньше, чем «настолько, насколько это возможно», и будет экономить на топливе.
Компьютер не может видеть, что происходит, и будет реагировать только тогда, когда вы там. Если вы немного проактивны в выборе скорости и передачи, это может увеличить срок службы вашего дорогого трактора.
Брэд Нельсон — независимый писатель из Вашингтона.
Основан фермерами, которые стремились сэкономить время и избавиться от дорогостоящей рабочей силы, Оборудование для работы с сеном Maxilator — аккумулятор сена превратился в часть одного из крупнейших в Америке семейных производителей продукции.
Northstar Attachments — инновационный производитель специализированных тракторные навесное оборудование и оборудование, предназначенные в первую очередь для тракторов и грузчики.
Объяснение скорости поршня, угла штока и увеличения рабочего объема.
Интенсивный взгляд на ход коленчатого вала и его влияние на среднюю скорость поршня, инерцию и управление огромными разрушительными силами, действующими внутри двигателя.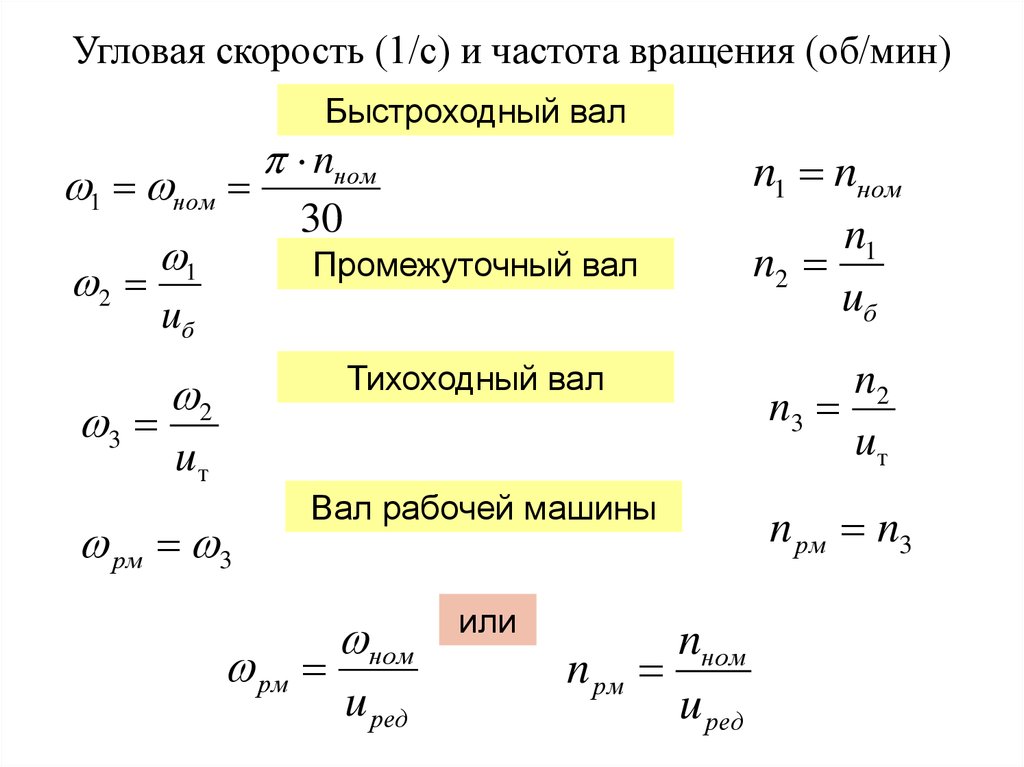
Производители двигателей уже давно рассчитывают среднюю скорость поршня своих двигателей, чтобы определить возможную потерю мощности и опасные пределы оборотов. Это математическое упражнение было особенно важно при увеличении полного рабочего объема с помощью коленчатого вала с поршнем, потому что средняя скорость поршня будет увеличиваться по сравнению со стандартным ходом, работающим при тех же оборотах в минуту.
Но что, если бы была другая динамика двигателя, которая могла бы дать строителям лучшее представление о долговечности возвратно-поступательного узла?
На видео выше показаны два двигателя, один с короткоходным коленчатым валом, а другой со значительно более длинным ходом. Обратите внимание, что оба поршня достигают ВМТ и НМТ одновременно, но поршень в двигателе с более длинным ходом поршня (слева) должен двигаться значительно быстрее.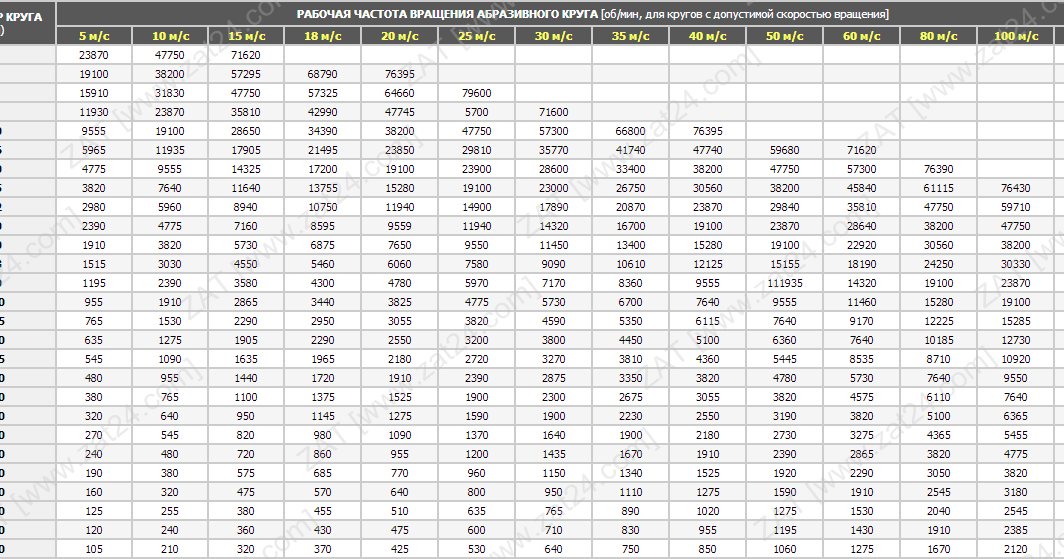
«Вместо того, чтобы сосредотачиваться на средней скорости поршня, обратите внимание на влияние силы инерции на поршень», — предлагает Дэйв Фасснер, руководитель отдела исследований и разработок K1 Technologies.
Давайте сначала рассмотрим определение средней скорости поршня, также называемой средней скоростью поршня. Это эффективное расстояние, которое поршень проходит в заданную единицу времени, и для целей сравнения оно обычно выражается в футах в минуту (fpm). Стандартное математическое уравнение довольно простое:
Средняя скорость поршня (футов в минуту) = (ход x 2 x об/мин)/12
Существует более простая формула, но математика будет рассмотрена позже. Скорость поршня постоянно изменяется по мере его перемещения от верхней мертвой точки (ВМТ) к нижней мертвой точке (НМТ) и обратно в ВМТ за один оборот коленчатого вала. В ВМТ и НМТ скорость равна 0 футов в минуту, и в какой-то момент во время хода вниз и вверх он будет ускоряться до максимальной скорости, прежде чем замедлиться и вернуться к 0 футов в минуту.
Существуют формулы для расчета скорости поршня при каждом градусе поворота коленчатого вала, но обычно это гораздо больше информации, чем требуется большинству производителей двигателей. Традиционно они смотрят на среднюю или среднюю скорость поршня при вращении кривошипа и, возможно, рассчитывают максимальную скорость поршня.
Средняя скорость поршня равна общему расстоянию, которое проходит поршень за один полный оборот коленчатого вала, и умножается на число оборотов двигателя. Скорость поршня, очевидно, увеличивается с увеличением оборотов, и скорость поршня также увеличивается с увеличением хода. Давайте рассмотрим быстрый пример.
Чтобы просмотреть все предложения коленчатых валов K1 Technologies, нажмите ЗДЕСЬ
Большой блок Chevy с коленчатым валом с ходом 4000 дюймов, работающим со скоростью 6500 об/мин, имеет среднюю скорость поршня 4333 футов в минуту.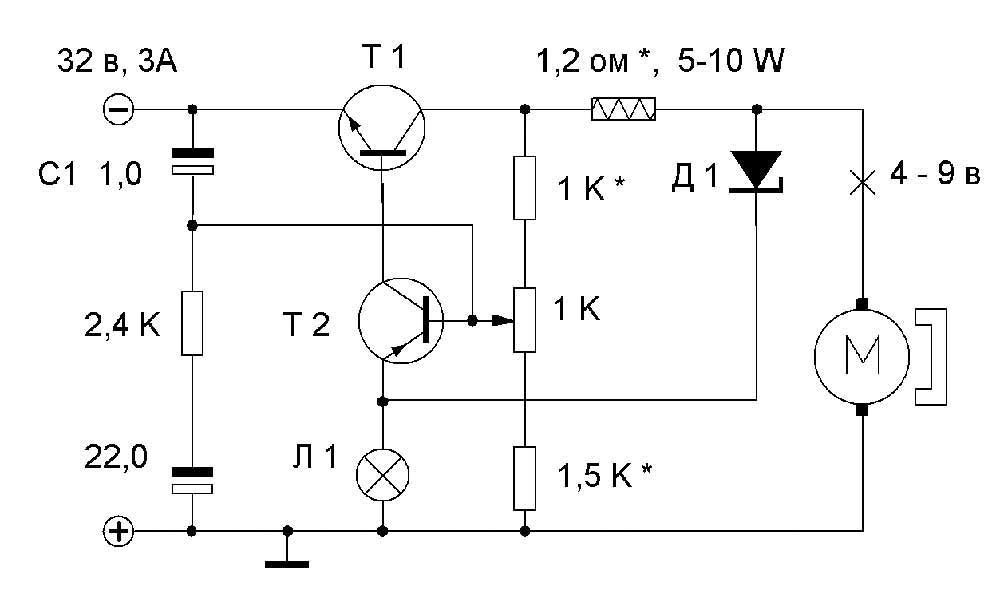 Давайте еще раз рассмотрим формулу, используемую для расчета этого результата. Умножьте ход на 2, а затем умножьте это число на число оборотов в минуту. Это даст вам общее количество дюймов, пройденных поршнем за одну минуту. В этом случае формула 4 (ход) x 2 x 6500 (об/мин), что равняется 52 000 дюймов. Чтобы прочитать это в футах в минуту, разделите на 12. Вот полная формула:
Давайте еще раз рассмотрим формулу, используемую для расчета этого результата. Умножьте ход на 2, а затем умножьте это число на число оборотов в минуту. Это даст вам общее количество дюймов, пройденных поршнем за одну минуту. В этом случае формула 4 (ход) x 2 x 6500 (об/мин), что равняется 52 000 дюймов. Чтобы прочитать это в футах в минуту, разделите на 12. Вот полная формула:
(4 x 2 x 6 500)/12 = 4 333 футов в минуту
Вы можете упростить формулу с помощью небольшого математического трюка. Разделите числитель и знаменатель этого уравнения на 2, и вы получите тот же ответ. Другими словами, умножьте ход поршня на число оборотов в минуту, а затем разделите на 6.
(4 x 6500)/6=4333 футов в минуту
С помощью этой более простой формулы мы рассчитаем среднюю скорость поршня при увеличении хода до 4500 дюймов.
(4,5 x 6500)/6=4875 футов в минуту
Как видите, средняя скорость поршня увеличилась почти на 13 процентов, хотя число оборотов не изменилось.
Опять же, это средняя скорость поршня за весь ход. Чтобы рассчитать максимальную скорость, которой достигает поршень во время хода, требуется немного больше вычислений, а также длина шатуна и угловатость шатуна в зависимости от положения коленчатого вала. Существуют онлайн-калькуляторы, которые вычисляют точную скорость поршня при любом заданном вращении коленчатого вала, но вот основная формула, часто используемая производителями двигателей, которая не требует длины штока:
Максимальная скорость поршня (фут/мин)=((Ход x дюйм)/12)x об/мин )x 6 500 = 7 658 футов в минуту
Путем преобразования футов в минуту в мили в час (1 футов в минуту = 0,011364 мили в час) этот поршень движется от 0 до 87 миль в час примерно за два дюйма, а затем возвращается к нулю в пределах оставшегося пространства. Цилиндр глубиной 4,5 дюйма. Теперь представьте, что поршень BBC весит около 1,3 фунта, и вы можете получить представление об огромных силах, воздействующих на коленчатый вал, шатун и поршневой палец — вот почему Фусснер предлагает смотреть на силу инерции.
Цилиндр глубиной 4,5 дюйма. Теперь представьте, что поршень BBC весит около 1,3 фунта, и вы можете получить представление об огромных силах, воздействующих на коленчатый вал, шатун и поршневой палец — вот почему Фусснер предлагает смотреть на силу инерции.
«Инерция — это свойство материи, заставляющее ее сопротивляться любым изменениям в своем движении», — объясняет Фусснер. «Этот принцип физики особенно важен при разработке поршней для высокопроизводительных приложений».
Удлиненный шатун обеспечивает более мягкий переход при изменении направления поршня. Более длинный шатун также уменьшает компрессионную высоту поршня и помогает снять вес с вращающегося узла.Сила инерции является функцией массы, умноженной на ускорение, и величина этих сил увеличивается пропорционально квадрату скорости двигателя. Другими словами, если вы удвоите скорость вращения двигателя с 3000 до 6000 об/мин, силы, действующие на поршень, не удвоятся, а учетверятся.
«Начав подниматься вверх по цилиндру, поршень и связанные с ним компоненты пытаются продолжить движение», — напоминает Фусснер.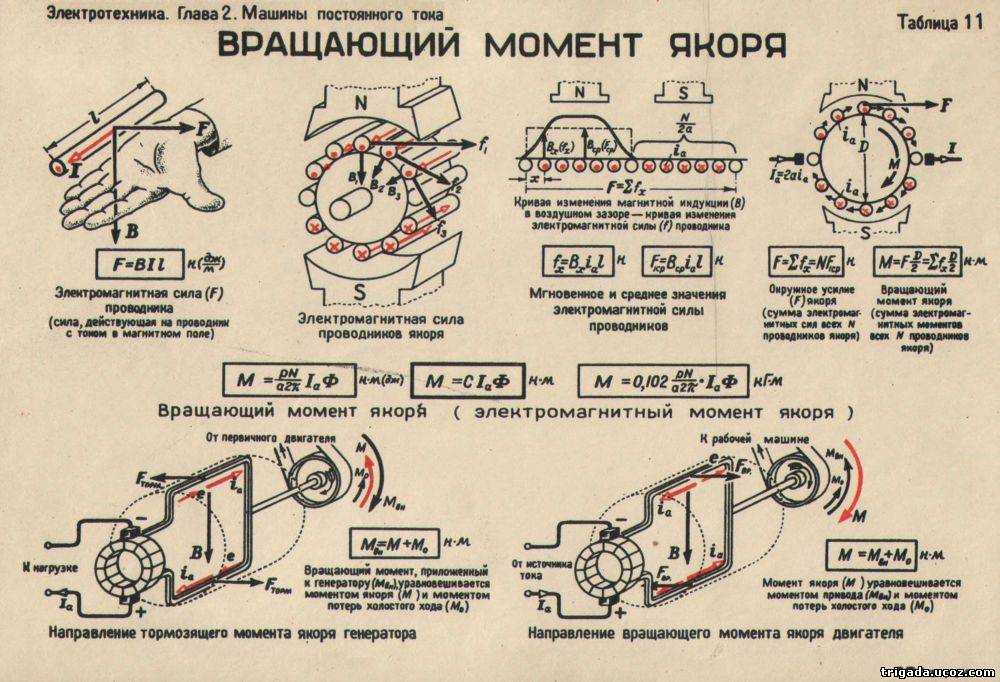 «Его движение останавливается и сразу же реверсируется только под действием шатуна и импульса коленчатого вала».
«Его движение останавливается и сразу же реверсируется только под действием шатуна и импульса коленчатого вала».
Из-за угловатости шатуна, на которую влияет длина шатуна и ход двигателя, Максимальная скорость движения вверх или вниз не достигается примерно до 76 градусов до и после ВМТ, при этом точные положения зависят от соотношения длины штока и хода поршня», – говорит Фусснер.
Шатуны Stroker, такие как эта кованая деталь LS7 от K1 Technologies, — отличный способ увеличить рабочий объем. Однако, когда ход увеличивается, поршень должен ускоряться с каждым оборотом быстрее, чтобы покрыть большую рабочую площадь стенки цилиндра. Ищете коленчатый вал LS Stroker? Кликните сюда. – Это означает, что поршень имеет около 152 градусов поворота кривошипа, чтобы перейти от максимальной скорости к нулю и обратно к максимальной скорости в верхней половине хода. А затем примерно 208 градусов, чтобы пройти ту же последовательность в нижней половине хода. Следовательно, сила инерции, направленная вверх, больше, чем сила инерции, направленная вниз».
Если не учитывать шатун, существует формула для расчета основной силы инерции:
0,0000142 x Вес поршня (фунты) x RPM2 x Ход (дюймы) = Сила инерции
Поршень вес включает кольца, штифт и фиксаторы. Давайте рассмотрим простой пример одноцилиндрового двигателя с ходом поршня 3000 дюймов (такой же, как у малоблочных двигателей Chevy 283ci и 302ci) и поршнем в сборе весом 1000 фунтов (453,5 грамма), работающим при 6000 об/мин:
0,0000142 x 1 x 6000 x 6000 x 3 = 1534 фунта
С помощью некоторых дополнительных математических вычислений, используя длину штока и ход, можно получить поправочный коэффициент для повышения точности результатов силы инерции.
Кривошип Радиус÷Длина шатуна
«Из-за действия шатуна сила, необходимая для остановки и перезапуска поршня, максимальна в ВМТ», — говорит Фусснер. «Эффект шатуна заключается в увеличении первичной силы в ВМТ и уменьшении первичной силы в НМТ на этот коэффициент R/L».
В этом примере радиус равен половине хода коленчатого вала (1,5 дюйма), деленной на длину штока 6000 дюймов, что дает коэффициент 0,25 или 383 фунта (1534 x 0,25 = 383). Этот коэффициент добавляется к исходной силе инерции при движении вверх и вычитается при движении вниз.
Кривошип слева и справа находится в одной и той же точке при соответствующем вращении. Однако поршень слева должен двигаться намного быстрее, чтобы достичь верхней мертвой точки одновременно с поршнем справа. «Итак, фактическая восходящая сила в ВМТ становится равной 1 917 фунтам, а фактическая нисходящая сила в НМТ становится равной 1 151 фунту», — говорит Фусснер. «Эти силы изменяются прямо пропорционально весу поршня в сборе и длине хода штока, а также пропорционально квадрату скорости двигателя. Следовательно, эти цифры можно принять за базовые для простой оценки сил, создаваемых в двигателе любого другого размера». максимальная скорость поршня (используя нашу предыдущую формулу) составляет 4712 футов в минуту.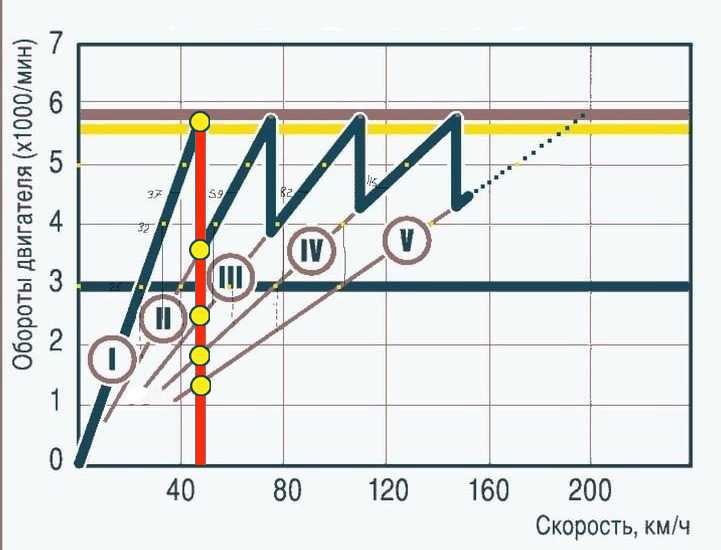
Что произойдет, если вы увеличите ход с 3000 дюймов до 3250 дюймов? Во-первых, средняя скорость поршня увеличивается до 3250 футов в минуту, а максимальная скорость поршня подскакивает до 5105 футов в минуту. Затем первичная сила увеличивается с 1534 фунтов до 1661 фунтов. Также есть изменения при добавлении нового коэффициента R/L, равного 0,27 (1,625 × 6,000). Фактическая восходящая сила в ВМТ становится равной 2109 фунтов, а фактическая нисходящая сила в НМТ становится равной 1213 фунтам.
«Если мы увеличим скорость двигателя с ходом 3,250 дюйма до 7000 об/мин, оставив все остальные детали равными, основная сила увеличится до 2261 фунта», — говорит Фусснер. «Затем примените коэффициент R/L, равный 0,27, и фактическая сила, направленная вниз, составит 1651 фунт. Фактическая восходящая сила в ВМТ становится равной 2871 фунту. Это почти полторы тонны!»
Теперь рассмотрим эффекты более легкого поршня. При сохранении хода поршня 3,20 дюйма и 7000 об/мин, но переходе на поршень весом 340 граммов (0,750 фунта), максимальное усилие снижается с 2871 фунта до 2154 фунтов, или на 717 фунтов меньше силы. Эта же более легкая конфигурация поршня будет иметь силу 1238 фунтов, необходимую для остановки и перезапуска поршня в НМТ, что на 413 фунтов меньше.
Эта же более легкая конфигурация поршня будет иметь силу 1238 фунтов, необходимую для остановки и перезапуска поршня в НМТ, что на 413 фунтов меньше.
«Таким образом, с каждым полным оборотом двигатель будет испытывать на 1130 фунтов меньше силы инерции с более легким поршневым узлом», — говорит Фусснер. «Это уменьшение силы инерции, конечно, будет применяться к каждому цилиндру в многоцилиндровом двигателе. Двигатель, работающий на 7 000 об/мин, будет останавливать и запускать каждый поршень 14 000 раз в минуту».
Когда поршень достигает верхней мертвой точки в такте выпуска, у него нет подушки сжатия, которая могла бы замедлить его. Вместо этого шатун принимает на себя всю тяжесть силы, которая тянет его балку и пытается отделить ее крышку. Качественные шатуны имеют первостепенное значение для мощного двигателя с высокими оборотами. Ищете кованые шатуны? Кликните сюда! Средние и максимальные скорости поршня по-прежнему являются ценными расчетами для любого производителя двигателей, который вносит изменения в проверенную формулу. Превышение средней скорости поршня 5000 футов в минуту должно привлечь ваше внимание и побудить переосмыслить выбор деталей. Чрезмерная скорость поршня может привести к непостоянной смазке стенок цилиндра, и в некоторых ситуациях поршень будет ускоряться быстрее, чем фронт пламени во время сгорания. В то время как первое может привести к поломке деталей, второе приводит к потере мощности.
Превышение средней скорости поршня 5000 футов в минуту должно привлечь ваше внимание и побудить переосмыслить выбор деталей. Чрезмерная скорость поршня может привести к непостоянной смазке стенок цилиндра, и в некоторых ситуациях поршень будет ускоряться быстрее, чем фронт пламени во время сгорания. В то время как первое может привести к поломке деталей, второе приводит к потере мощности.
И поршни также должны быть максимально легкими, не жертвуя требуемой прочностью и долговечностью. Силы инерции будут растягивать шатуны и препятствовать ускорению коленчатого вала, что опять же может привести к выходу из строя деталей и снижению мощности.
«Нам известно, что в течение многих лет общепринятой мерой, используемой для определения зоны опасности структурной целостности поршня в работающем двигателе, является средняя скорость поршня», — резюмирует Фусснер. «Как сказал инструктор по прыжкам с парашютом своему ученику, больно не от скорости падения, а от внезапной остановки. Так и с поршнями. Поэтому вместо того, чтобы сосредотачиваться только на средней скорости поршня, давайте также решим рассмотреть влияние силы инерции на поршень и то, что мы можем сделать, чтобы уменьшить эту силу. А если это невозможно, убедитесь, что компоненты достаточно прочны, чтобы выдержать поставленную нами задачу».
Так и с поршнями. Поэтому вместо того, чтобы сосредотачиваться только на средней скорости поршня, давайте также решим рассмотреть влияние силы инерции на поршень и то, что мы можем сделать, чтобы уменьшить эту силу. А если это невозможно, убедитесь, что компоненты достаточно прочны, чтобы выдержать поставленную нами задачу».
«Хотя увеличение длины штока смягчит инерционную нагрузку за счет изменения вышеупомянутого отношения R/L, это не уменьшит среднюю скорость поршня, поскольку до тех пор, пока не изменится ход поршня», — продолжает Фусснер. «Поршень по-прежнему должен проходить одинаковое расстояние за один оборот коленчатого вала, независимо от длины штока. Скорость — это расстояние, пройденное за единицу времени».
Последнее замечание о скорости поршня — не так давно верхним пределом скорости поршня считалось 2500 футов в минуту. Важно учитывать, что средняя скорость поршня также используется в качестве ориентира для рассмотрения других компонентов двигателя, таких как шатуны и коленчатые валы.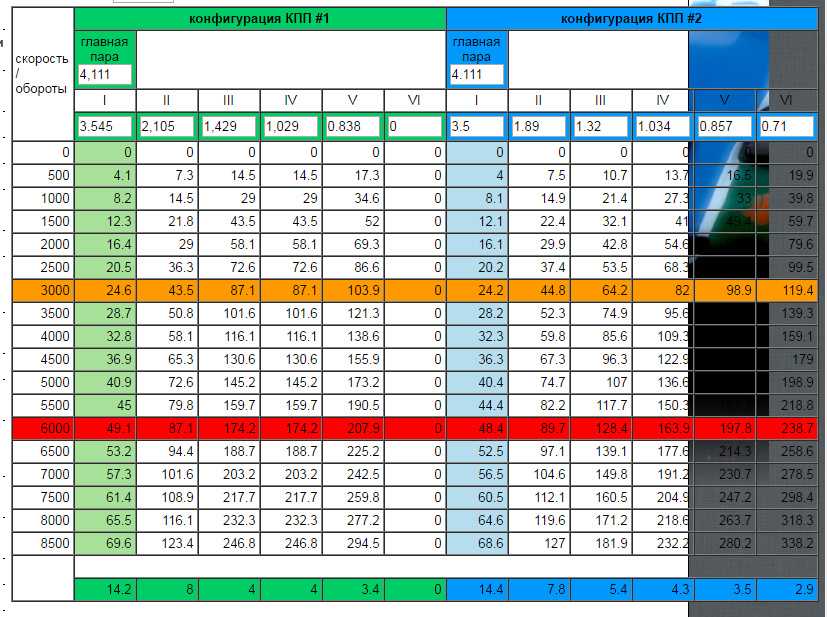 На заре хот-родинга большинство двигателей имели чугунные кривошипы и шатуны и литые алюминиевые поршни, которые не так прочны, как сегодняшние детали двигателя.
На заре хот-родинга большинство двигателей имели чугунные кривошипы и шатуны и литые алюминиевые поршни, которые не так прочны, как сегодняшние детали двигателя.
«Итак, увеличение прочности этих деталей позволило увеличить безопасную среднюю скорость поршня более чем в два раза до 5000 футов в минуту или более», — говорит Фусснер. «Еще один фактор — использование. Будет ли двигатель работать в течение длительного времени с высокой скоростью поршня или для быстрого прохождения тормозной полосы? Сокращение времени выдержки при высоких скоростях поршня повышает надежность. Прочные и легкие компоненты смогут выдержать более высокие скорости поршня, чем тяжелые менее прочные компоненты».
Почему некоторые двигатели имеют высокие обороты и их преимущества
От Формулы 1 до Mazda RX-8, от S2000 до спортивных мотоциклов, высокооборотные двигатели украли наши сердца и наши слухи. Так что же делает их способными к таким высоким красным линиям?
Напомнить позже
Чтобы лучше понять, как устанавливаются пределы красной черты, давайте углубимся в следующие вопросы:
- В чем преимущество высокооборотистого двигателя?
- Какую роль играет соотношение диаметра цилиндра к ходу?
- Как двигатели дышат на высоких оборотах?
- Как возвратно-поступательные части влияют на красную черту?
- Низкооборотистые двигатели — это плохо?
1.
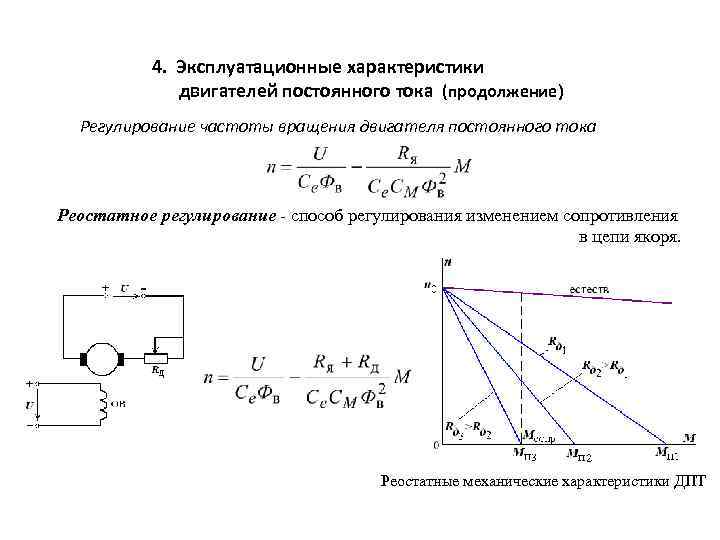 В чем преимущество высокооборотистого двигателя?
В чем преимущество высокооборотистого двигателя?Проще говоря, мощность — это самое большое преимущество высокооборотистого двигателя. Мощность зависит от крутящего момента и оборотов двигателя. Увеличьте максимальные обороты или крутящий момент, и мощность возрастет. Если у вас 2,0-литровый двигатель, вам потребуется большое количество наддува, чтобы добиться высоких показателей мощности. С другой стороны, простое проектирование для более высоких оборотов означает, что вы увеличите количество вырабатываемой мощности. Крутящий момент не имеет решающего значения, если вы вырабатываете достаточную мощность, так как вы можете правильно настроить автомобиль, чтобы поддерживать конкурентоспособный крутящий момент на колесах. Конечно, вы всегда можете увеличить рабочий объем, чтобы увеличить мощность, но обычно это снижает эффективность.
Один из самых простых способов создать высокооборотный двигатель — начать с квадратной конструкции (диаметр больше, чем ход поршня).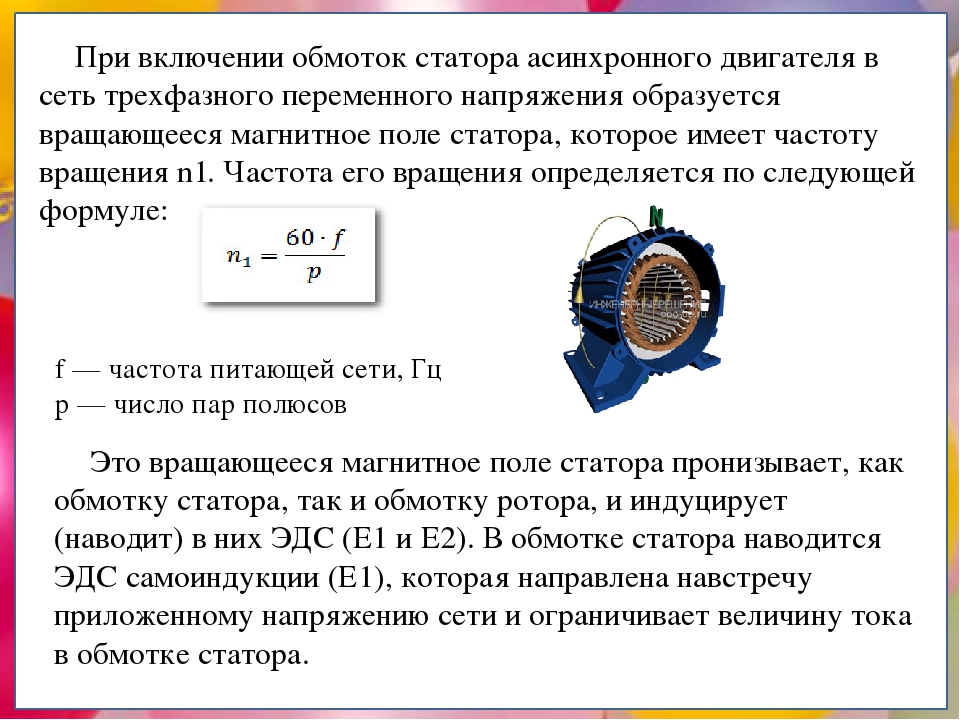 У этого типа конструкции есть множество преимуществ, но, что касается оборотов двигателя, скорость поршня остается относительно низкой. Более низкая скорость поршня означает меньшую нагрузку на шатуны и коленчатый вал, а также приемлемую скорость распространения пламени, что позволяет двигателю работать еще выше. Кроме того, имея более широкое отверстие, вы можете иметь более крупные впускные и выпускные клапаны, что приводит к лучшему потоку воздуха на высоких оборотах.
У этого типа конструкции есть множество преимуществ, но, что касается оборотов двигателя, скорость поршня остается относительно низкой. Более низкая скорость поршня означает меньшую нагрузку на шатуны и коленчатый вал, а также приемлемую скорость распространения пламени, что позволяет двигателю работать еще выше. Кроме того, имея более широкое отверстие, вы можете иметь более крупные впускные и выпускные клапаны, что приводит к лучшему потоку воздуха на высоких оборотах.
Допустим, у вас есть два 4,0-литровых двигателя V8, которые развивают скорость до 6000 об/мин. Один из них имеет отношение диаметра цилиндра к ходу 0,5 (68,3 мм/136,6 мм), а другой — 1,5 (98,5 мм/65,6 мм). Подквадратный двигатель будет иметь среднюю скорость поршня 27,32 м/с, в то время как двигатель с большим диаметром цилиндра будет иметь среднюю скорость поршня 13,12 м/с, то есть вдвое меньше! Короткоходный двигатель мог раскручиваться до 12 500 об/мин, прежде чем достичь той же скорости поршня, что и другой двигатель.
Двигатели Формулы-1 и мотоциклетные двигатели часто имеют очень высокое отношение диаметра цилиндра к ходу, что позволяет развивать более высокие обороты двигателя (и, следовательно, большую мощность). Соотношение диаметра цилиндра к ходу 2,5 не так уж и странно в мире F1.
3. Как двигатели дышат при высоких оборотах?
Другим важным фактором, влияющим на скорость вращения двигателя, является то, насколько хорошо он может дышать. Здесь клапанный механизм играет решающую роль. Как упоминалось выше, большое отверстие позволит использовать более крупные клапаны и, следовательно, больший поток воздуха при высоких оборотах. Тем не менее, большие клапаны тяжелее и могут привести к плаванию клапана, когда шток клапана больше не синхронизирован с распределительным валом, поскольку пружины клапана больше не успевают. Двигатели с двумя клапанами на цилиндр, как правило, имеют большие клапаны, и это еще более сложная задача.
Можно до некоторой степени преодолеть зависание клапана. Можно использовать жесткие пружины клапана, чтобы гарантировать, что клапан не будет плавать, но это означает, что для сжатия пружины требуется больше энергии, и, следовательно, система менее эффективна. Изготовление клапанов из легких материалов может помочь снизить потребность в более жестких пружинах клапанов, поэтому в спортивных автомобилях часто используется титан для уменьшения массы.
В двигателях F1 вместо физических пружин используются пневматические пружины, а сжатый азот удерживает клапаны в соответствии с профилем кулачка.
Секрет высоких оборотов роторных двигателей заключается в том, что все движущиеся части вращаются, а не возвратно-поступательно. Напряжение и смещение клапана становятся проблемой, когда возвратно-поступательные массы велики, например, в двигателях с толкателями, где клапаны и толкатели постоянно меняют направление. По цене можно использовать качественные материалы для смягчения проблемы, но деньги могут сделать так много только тогда, когда есть превосходный дизайн для смягчения проблемы.
По цене можно использовать качественные материалы для смягчения проблемы, но деньги могут сделать так много только тогда, когда есть превосходный дизайн для смягчения проблемы.
Ни в малейшей степени. Дизельные двигатели редко имеют обороты, близкие к бензиновым эквивалентам, но часто они не менее мощные и более эффективные. В дизелях используется высокая степень сжатия и длинный ход поршня, что приводит к высоким давлениям и температурам внутри цилиндра, что требует использования прочных материалов для долговечности. Более длинный ход может улучшить крутящий момент, но за счет уменьшения красной зоны. Кроме того, в случае двигателей с двумя клапанами на цилиндр крутящий момент на низких оборотах имеет тенденцию быть лучше в результате более быстрого воздушного потока при более низких оборотах двигателя.
Объяснение передачи мотоцикла, скорости и частоты вращения двигателя
Это еще один пост из моей серии математических расчетов для мотоциклов — понимание того, как работают числа мотоциклов.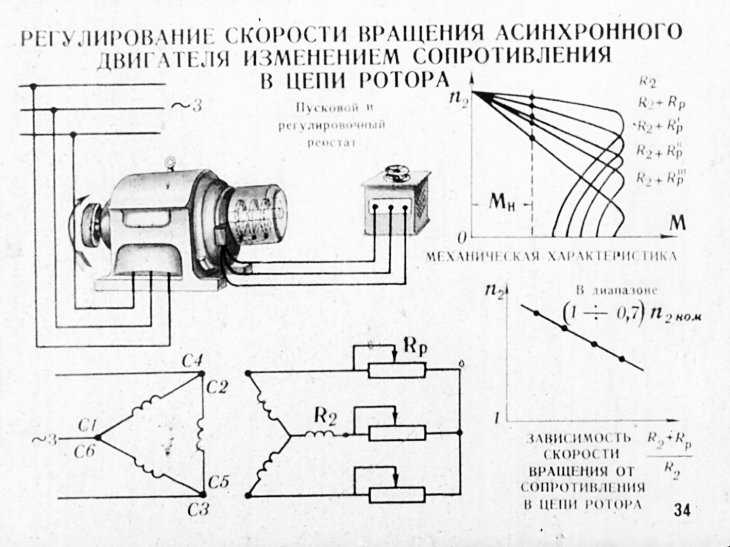 В этом посте я сосредоточусь на передаче мотоцикла и взаимосвязи между частотой вращения двигателя и скоростью относительно земли.
В этом посте я сосредоточусь на передаче мотоцикла и взаимосвязи между частотой вращения двигателя и скоростью относительно земли.
Вот все статьи по математике (и физике) для мотоциклов и транспортных средств в целом:
- Ярлыки для преобразования британских и метрических единиц
- Диаметр цилиндра, ход поршня и объем двигателя
- Объяснение мощности, крутящего момента, максимальной скорости и тяги.
- Мотоциклетная передача, скорость и частота вращения двигателя. Например, я читал, что передаточное число последнего Грома было изменено в пользу тяги и ускорения. Топовая передача последнего BMW S 1000 R была изменена для более низких оборотов на скоростях автомагистрали. И так далее.
У нас есть интуитивное представление о передаче мотоцикла, так как большинство людей ездили на велосипедах и видели размеры звездочек. Некоторые из вас, возможно, думали о соотношении передней и задней звездочки и поняли, что меньшая передняя звезда означает, что вы едете медленнее, а меньшая задняя означает, что вы едете быстрее (и наоборот).
Но смена передачи мотоцикла может потребовать изменения нескольких других вещей. Обычно это означает передаточное число коробки передач или передаточное число главной передачи, но также может означать и другие вещи.
Передаточное отношение мотоцикла имеет еще один внешний фактор, о котором стоит подумать. У каждого велосипеда есть своя оптимальная кривая крутящего момента, и независимо от того, катаетесь ли вы по улицам или участвуете в гонках, вы хотите быть в центре внимания группы. (В целом это верно и для велосипедов, но там это гораздо более тактильно и интуитивно понятно.)
Ниже определенного числа оборотов в минуту велосипеды дергаются, а выше определенного числа оборотов в минуту они теряют мощность или нажимают на ограничитель оборотов (выше которого люди те, кто программирует ограничитель оборотов, думают, что вы можете столкнуться с неестественными условиями, такими как недостаточно быстрое открытие/закрытие клапанов или превышение способности жидкости выполнять свою работу).
В этой статье основное внимание уделяется пониманию всего, что происходит между двигателем и дорогой, и тому, как на него влияет передача мотоцикла, а также пониманию того, как замена самой простой детали (обычно звездочек/цепи) меняет передаточное число главной передачи. и, следовательно, как мотоцикл ведет себя в определенных частях диапазона оборотов и максимальной скорости.
Если вы хотите сменить передачу мотоцикла, не занимаясь математикой самостоятельно, воспользуйтесь сайтом gearingcommander.com.
Есть три причины, по которым я хотел сделать это сам: 1. выяснить, как это работает, 2. проработать другие аспекты, не описанные на этом сайте (например, влияние на крутящий момент и тягу), и 3. потому что этот сайт не каждый велосипед на нем.
Читайте дальше, если хотите сами разобраться в передаче мотоцикла!
Вы также можете скопировать мой калькулятор передаточного числа для мотоциклов, чтобы произвести собственные расчеты. Я, вероятно, продолжу добавлять к нему, так что заходите позже, если хотите увидеть больше.
Калькулятор передачи мотоцикла ДаныВы одержимы мотоциклами?
Ну, я. Вот почему я создал этот сайт — как отдушину. Я люблю учиться и делиться тем, что может быть полезно другим. Если вам нравится то, что вы здесь читаете, и вы настолько же одержимы, как и я, вам может быть интересно узнать, когда я публиковал больше. (Проверьте последнюю версию, чтобы понять, что вы увидите.)
Объяснение передачи мотоцикла — В двух словах
Вкратце, между двигателем вашего мотоцикла (вращающимся коленчатым валом) и дорогой находятся четыре вещи, которые определяют передачу мотоцикла.
Это:
- Первичная ведущая шестерня — несколько массивных неподвижных шестерен, которые идут между коленчатым валом и сцеплением/коробкой передач. (На некоторых велосипедах с карданным приводом есть еще и вторичная передача.)
- Коробка передач (получается 5-6 передач… иногда 4, а иногда и 7, но редко!)
- Главная передача — обычно цепь, иногда вал или ремень
- Колесо и шина
Между двигателем и дорогой есть другие детали, такие как сцепление и цепь, но они не влияют на мотоцикл передача.
На первых трех ступенях пониженных передач (без повышающей передачи) целью переключения является понижение . Двигатель работает быстро, но колесо движется медленно.
Между числом оборотов в минуту и конечной скоростью нужно немного посчитать. Все в разных единицах!
- Скорость двигателя измеряется в об/мин (оборотов в минуту)
- Колеса/шины указаны в странной смеси дюймов, процентов и миллиметров (??) вы находитесь в мире (я сделаю это в обоих направлениях, но если это станет слишком запутанным, я буду придерживаться метрики)
Вау, способ сделать это проще! Вы должны преобразовать обороты в обороты в час (просто умножьте это на 60) и рассчитать окружность шины, объединив цифры, чтобы получить окончательную единицу в милях или километрах.
Но вот краткая математика.
От скорости двигателя к скорости относительно грунта
Я использую слово «скорость» не для фантазии, а просто для того, чтобы помочь отличить скорость двигателя (обороты в единицу времени) от того, насколько быстро мотоцикл движется вперед.
Во-первых, чтобы вычислить конечную скорость по частоте вращения двигателя, вы вычисляете передаточное отношение трех вышеперечисленных вещей между двигателем и колесом (1. первичная передача + иногда вторичная передача, 2. коробка передач и 3. главная передача), а потом умножить на длину окружности колеса.
Скорость относительно земли (км/ч) = частота вращения двигателя / передаточное число главной передачи / передаточное число коробки передач / передаточное число главной передачи x длина окружности колеса первые передачи от двигателя вниз к колесу.
Если вы просто смотрите на одну передачу (например, максимальная скорость на первой передаче), вы можете объединить передаточные числа вместе в комбинированное передаточное число :
Комбинированное передаточное число = передаточное число первичной передачи x передаточное число коробки передач x главная передача соотношение
Вы можете использовать комбинированное передаточное отношение мотоцикла, чтобы увидеть, насколько оно понижает скорость двигателя до скорости главной передачи (в об/мин).
Другими словами, комбинированное передаточное число говорит: за каждый оборот колеса двигатель должен провернуть это количество раз. Обычно что-то 10-20 раз на первой передаче. Меньше для более высоких передач.
Наконец, для расчета скорости относительно земли по частоте вращения двигателя:
Скорость относительно земли (км/ч) = частота вращения двигателя (об/мин) x 60 / комбинированное передаточное число x окружность колеса (м) / 1000 Объединение констант: = частота вращения двигателя (об/мин) / комбинированное передаточное число x длина окружности колеса (м) * 0,06
От скорости относительно земли до оборотов двигателя
Во-вторых, чтобы определить, на какой частоте вращения двигателя вы будете работать при определенной скорости движения, вы, что неудивительно, действуете наоборот.
Частота вращения двигателя (об/мин) = скорость движения (км/ч) x передаточное число / длина окружности колеса / 0,06
Вы можете задаться вопросом: «Зачем мне знать эту цифру?».
Например, если вы знаете, что будете на шоссе, вы можете захотеть, чтобы ваш двигатель вращался на более низкой частоте вращения для большей экономии топлива и уменьшения вибраций, и поэтому вам будет полезно немного снизить его передачу.Итак, откуда вы берете эти цифры для передаточных чисел и так далее? Они часто находятся в спецификациях, но в противном случае они также есть в руководствах (которые вы почти всегда можете скачать или найти в Интернете бесплатно). См. примеры ниже.
Расчет длины окружности шины
Вам необходимо знать длину окружности шины, т. е. расстояние, которое вы проезжаете за один оборот колеса, чтобы знать, как передаточное отношение вашего мотоцикла повлияет на конечную скорость.
Несмотря на мою склонность писать шину как «шина» (я устал объяснять, что мне все равно, поскольку единицы измерения не имеют человеческого значения, но вы просто должны быть последовательны!), мне все равно, какую единицу вы использовать. Тем не менее, меня заинтриговало, что соглашение о спецификациях шин во всем мире включает как метрические, так и имперские единицы измерения.
Видишь, мы все можем поладить.Например, для многих спортивных мотоциклов размер задней шины составляет 180/55-17. Это означает
- 180 мм в поперечнике (ширина профиля) – метрические
- 17 дюймов диаметр обода (исключая шину) – британские единицы длина окружности этой шины в метрах:
c = π.d = 3,14159 х д d = диаметр обода + (2 x диаметр стенки) = (дюймы обода x 0,0254) + (ширина шины / 1000 x профиль стенки / 100 x 2) = (дюймы обода x 0,0254) + (ширина шины x профиль стенки x 0,00002) c = ((дюймы обода x 0,0254) + (ширина шины x профиль стенки x 0,00002)) x 3,14159
Например, шины Ducati Panigale V4 R имеют размеры 200/60-17. Таким образом, окружность шины равна:
c = ( дюймов обода x 0,0254) + ( ширина шины x профиль шины x 0,00002) x π = ( 17 х 0,0254) + ( 200 х 60 х 0,00002) х π = (0,4318 + 0,24) х π = 0,6718 х 3,14159 = 2,11 м
Если вам удобнее считать в футах, то возьмите цифру и умножьте на 3,28.
Окружность шины становится 6,92 фута или 6 футов 11 дюймов.Теперь вы можете подумать — это все слишком чисто. Что, если вы изнашиваете часть протектора? Что делать, если шина немного спущена? Или что, если вы работаете в банке? И так далее.
Все это верно, и это немного «предположим, что все идеально», но также имейте в виду, что диапазон диаметров шин не ОГРОМНЫЙ. Например, окружность повседневного велосипеда, такого как шина Honda CBR500R, составляет 1,96 м. И окружность массивного Suzuki Boulevard M109Задняя шина R составляет 2,04 метра.
Альтернатива — использование шага цепи
Еще один способ осмыслить передачу — подумать о шаге цепи, количестве зубьев на задней звездочке и его соотношении с диаметром задней звездочки.
Отношение диаметра шины к делительному диаметру задней звездочки, в конце концов, и есть конечная передача.
(«Диаметр шага» — это воображаемый круг, описываемый звеньями цепи вокруг звездочки.)
Мотоциклы с шагом цепи 5/8 дюйма (те, которые начинаются с 5, например 520, 525 и 530 — у большинства мотоциклов нормального размера) расстояние между зубьями составляет 5/8 дюйма.
Заманчиво просто подумать «хм, я умножу шаг на количество зубьев и вуаля , окружность!)», но это не так просто — будет немного не так. Для звездочки с 15 зубьями это будет расстояние вокруг 15-стороннего многоугольника.
Делительный диаметр рассчитывается так:
(шаг/2)/радиус = sin (угол тангажа/2) = грех (360/зуб/2) = грех (180/зубов) Поскольку (шаг/2)/радиус = шаг/диаметр шаг / диаметр = sin (180 / зубья) Так диаметр = шаг / sin (180 / зубья)Таким образом, знание диаметра задней звездочки позволяет рассчитать отношение диаметра шины к диаметру звездочки — это последний шаг передачи.
Пример расчета передачи мотоцикла — Ducati Panigale V4 R
Возьмем типичный пример повседневного мотоцикла Ducati panigale V4 R и выясним, как передача мотоцикла влияет на скорость при разных оборотах. О, давайте сначала посмотрим на это:
AhhВ качестве краткого ознакомления отметим, что Panigale V4 R оснащен другим, более оборотистым двигателем, чем стандартная линейка V4.
Стандартные V4, V4 S и V4 SP имеют 1103-кубовый V4, но V4 R имеет 998-кубовый V4. У него выше обороты, и, следовательно, у велосипеда другая передача.Итак, вот актуальная информация из руководства Panigale V4 R.
Информация о передаче из руководства Ducati Panigale V4RИзвлечение этой информации о передаче мотоцикла Panigale V4R:
- Первичный привод (перед коробкой передач): 54/30 = 1,80
- Обращение коробки передач в первую очередь: 38/14 = 2.7143
- Вторичный привод (спереди: задний звездочек) = 42/15 = 2,80
- Комбинированная передача = 1,8143.70170
- .
Итак, на первой передаче за каждый оборот колеса двигатель должен провернуться 13,68 раза.
Давайте посмотрим на скорость грунта при 13 000 об/мин, хороший момент для первого переключения. Я не эксперт, но именно здесь крутящий момент начинает падать (согласно таблице динамометрического стенда Cycle World), поэтому кажется, что это хорошее место для переключения передач, чтобы удержать мотоцикл в пиковом диапазоне крутящего момента.
Чтобы вычислить путевую скорость при этих оборотах в минуту, мы используем приведенную выше формулу
путевая скорость = частота вращения двигателя (об/мин) / комбинированное передаточное число x длина окружности колеса (м) x 0,06 = 13 000 / 13,68 х 2,11 х 0,06 = 120 км/ч (или 75 миль/ч)
Таким образом, Ducati Panigale V4R будет развивать скорость ~120 км/ч или 75 миль/ч на первой передаче, когда вы захотите переключиться.
Если вы хотите проехать какое-то время по шоссе со скоростью 85 миль в час (136,7 км/ч) и хотите знать, какая скорость двигателя на первой передаче, вы выбираете другой путь:
Частота вращения двигателя (об/мин) = скорость относительно земли (км/ч) x передаточное число / длина окружности колеса / 0,06 = 136,7 х 13,68 / 2,11 / 0,06 = 14 771 об/мин
Но зачем ехать с такой скоростью на первой передаче по шоссе? Звучит не слишком расслабляюще! На высшей передаче комбинированное передаточное отношение вашего мотоцикла составляет 1,8 х 30/24 х 2,8 = 6,3.
Таким образом, конечная скорость двигателя на скорости 85 миль в час (136,7 км/ч) будет 6800 об/мин.
Автоматизация всех этих расчетов зубчатой передачи мотоцикла
Как я упоминал выше, для этого можно просто воспользоваться онлайн-калькулятором. Но я нахожу это скучным.
Итак, я сделал свой собственный! Вот он — вы можете просмотреть его здесь и сделать собственную копию или загрузить в виде файла Excel.
Это довольно просто, данные на одном листе, расчеты на другом, а затем окончательное отображение на первой странице.
Я еще добавляю — улучшаю функции, обновляю данные. Вернитесь на эту страницу позже, если хотите увидеть, что изменилось.
И нет, эта модель не произведение искусства. Мои дни корпоративной онлайн-шмо в основном закончились! Но, надеюсь, вы сможете заглянуть в расчеты и немного посмотреть, как это работает.
Вы можете написать в столбце «переопределить», чтобы ввести свои собственные значения, например.
запись в 15:41 или 16:43, чтобы посмотреть, как это повлияет на передачу.Часто задаваемые вопросы о редукторах мотоциклов
Ниже приведен ряд часто задаваемых вопросов о редукторах мотоциклов, которые я буду держать здесь вместе.
Зачем вообще думать о передаче мотоцикла?
Мне нравится думать о передаче, потому что она немного говорит мне о том, каково это ездить на велосипеде, лениво сидя здесь на диване.
Мы все любим говорить о таких характеристиках, как мощность и крутящий момент. И, конечно же, 100 ft-lb или 75 Нм крутящего момента — это много и, вероятно, приводит к большому толчку вперед.
Очевидно, что полный газ на первой передаче ощущается иначе, чем на высшей передаче. Разница только в редукторе. Поэтому само собой разумеется, что если вы измените другие части передачи, вы можете изменить то, как вы ощущаете крутящий момент в 100 ft-lb / 75 Нм.
Итак, если вы найдете два мотоцикла с единицей крутящего момента X и одинаковым весом, их кривые крутящего момента и передаточные числа также станут частью истории того, как они ездят.
Как зубчатая передача влияет на тягу и перегрузки против вас, будет предметом отдельной статьи.
Зачем менять передачу мотоцикла?
Замена мотоцикла может быть пугающей концепцией для тех из нас, кто не вырос, возясь с механическими объектами.
Мотоциклы довольно сложные. Конечно, инженеры знают, что они делают? В конце концов, я не возился с холодильником или телевизором. Но с мотоциклами есть еще кое-что.
Есть несколько веских причин повозиться с коробкой передач мотоцикла.
Мотоцикл предназначен для широкого спектра возможных применений, от поездок в магазины за молоком до порки на нем по трассе в день трека. Трудно оптимизировать для всего, но передаточное число (а также подвеска и тормоза) обычно устанавливаются на среднем уровне, поэтому большую часть времени все в основном довольны.
Итак, во-первых, стили езды и использование велосипеда различаются . в то время как передача велосипеда подходит для целого ряда дорог, ваш стиль вождения может быть другим.
Например, мой Ducati Multistrada 1000 DS был создан для путешествий. Но я в основном ездил на работу, поэтому боролся с первой передачей, из-за чего она немного тянула. Одно из решений - сменить редуктор.Во-вторых, треки отличаются от тоже. Велосипеды предназначены для всех дорог, но если вы планируете часто использовать свой велосипед на определенной трассе, вам может помочь переключение передач. Некоторые трассы благоприятствуют максимальной скорости, а некоторые не имеют достаточно длинных участков и поэтому предпочитают быстрое ускорение. Вот почему люди устанавливают быстросменные держатели звездочек на свои трековые велосипеды, чтобы они могли легко поднимать или опускать зуб на задней звездочке для разных гусениц.
Наконец, некоторые решения в конструкции мотоциклов принимаются с учетом норм выбросов. Например, более высокая передача на более высоких передачах означает более низкую скорость двигателя при крейсерском режиме, что означает меньшую работу, выполняемую двигателем, и меньшие выбросы в обычном анализе.
Но более высокая передача достигается за счет ускорения. Если вы хотите участвовать в гонках на своем велосипеде, вы не так ограничены нормами выбросов, как дорожные велосипеды.
А иногда дизайнеры велосипедов просто немного нарушают баланс и пересматривают свои конструкции в более поздних велосипедах. Например, оригинальный Ducati Streetfighter был спроектирован так же, как и супербайк. Они изменили этот подход в более поздних итерациях. (См. историю моделей Ducati Streetfighter.)
Какое передаточное число передаточного числа?
Первичный привод коробки передач представляет собой неподвижную шестерню между коленчатым валом двигателя и сцеплением и коробкой передач.
Первичный привод имеет фиксированное передаточное число и обычно составляет от 1,5 до 3,0.
Первичным приводом двигателя мотоцикла часто являются прямозубые шестерни современных мотоциклов, но также может быть цепь или ремень, как и любой другой привод двигателя.
В современных мотоциклах Harley-Davidson с воздушным охлаждением первичным приводом обычно является цепь, залитая маслом, а иногда и ремень… а иногда и цепь, замененная ремнем (например, в мотоциклах типа чоппер).
На мотоциклах с карданным валом может быть пара компонентов первичной передачи, а иногда и шестерня при передаче движения двигателя на карданный вал.
Вопросы по зубчатым передачам
Я ни в коем случае не специалист по зубчатым передачам. Вероятно, единственные, кто может назвать себя таковыми, это тренеры по треку, которые очень хорошо знают трассу, ваш стиль и ваш мотоцикл.
Но если вы хотите связаться и обсудить варианты передачи или если у вас есть какие-либо вопросы, оставьте комментарий или отправьте мне электронное письмо, и я буду рад обсудить.
Влияние частоты вращения дизельного двигателя и содержания воды на характеристики выбросов трехфазных эмульсий
. 2004;39(5):1345-59.
doi: 10.1081/ese-120030336.
Чернг-Юань Линь 1 , Куо-Хуа Ван
принадлежность
- 1 Департамент морской техники, Тайваньский национальный университет океанов, Килунг, Тайвань, Китайская республика. [email protected]
- PMID: 15137702
- DOI: 10.1081/ese-120030336
Чернг-Юань Лин и соавт. J Environ Sci Health A Tox Hazard Subst Environ Eng. 2004.
. 2004;39(5):1345-59.
doi: 10.1081/ese-120030336.
Авторы
Чернг-Юань Линь 1 , Куо-Хуа Ван
принадлежность
- 1 Департамент морской техники, Тайваньский национальный университет океанов, Килунг, Тайвань, Китайская республика. [email protected]
- PMID: 15137702
- DOI: 10.1081/ese-120030336
Абстрактный
В этом исследовании изучалось влияние содержания воды в трехфазных эмульсиях и частоты вращения двигателя на характеристики сгорания и выбросов дизельных двигателей. Результаты показывают, что большее содержание воды в эмульсии вода-в-масле (В/М) и масло-в-воде-в-масле (М/В/М) приводит к более высокому значению удельного расхода топлива (bsfc) тормозов и более низкому O2, а также меньше выбросов NOx, но больше выбросов CO. Увеличение числа оборотов двигателя привело к увеличению bsfc, температуры выхлопных газов, соотношения топливо-воздух, выбросу CO2 и уменьшению NOx, выброса CO и дымности дыма.
Из-за физических структурных различий трехфазные эмульсии М/В/М, по наблюдениям, давали более высокую температуру выхлопных газов, более высокую вязкость эмульсии и более низкий выброс CO по сравнению с двухфазной эмульсией В/М. . Кроме того, использование эмульсий типа В/М с содержанием воды более 20 % может привести к более раннему останову дизельных двигателей по сравнению с двигателями, работающими на эмульсиях типа М/В/М с таким же содержанием воды. Следовательно, предполагается, что эмульсии с содержанием воды более 20% не подходят для использования в качестве альтернативного топлива для дизельных двигателей.Похожие статьи
Анализ горения, характеристик и выбросов дизеля, работающего на водо-биодизельной эмульсии и нанодобавке.
Веллайян С., Суббиа А., Чокалингам П. Веллайян С. и др. Environ Sci Pollut Res Int. 2018 ноября; 25 (33): 33478-33489.
doi: 10.1007/s11356-018-3216-3. Epub 2018 28 сентября.
Environ Sci Pollut Res Int. 2018.
PMID: 30267344Влияние водоэмульгированного топлива на тепловой КПД и выхлоп дизельного генератора.
Сю ДЖИ, Чанг ЮЙ, Ценг Ч, Ян ЮЛ, Чанг ЮМ, Чен КЦ, Лин ВЙ. Syu JY и др. J Air Waste Manag Assoc. 2014 авг; 64 (8): 970-8. дои: 10.1080/10962247.2014.
8. J Air Waste Manag Assoc. 2014. PMID: 25185398
Влияние водно-топливных эмульсий и добавки для улучшения сгорания на основе церия на выбросы выхлопных газов дизельных двигателей HD и LD.
Фарфалетти А., Асторга С., Мартини Г., Манфреди У., Мюллер А., Рей М., Де Санти Г., Красенбринк А., Ларсен Б.Р. Фарфалетти А. и др. Технологии экологических наук. 1 сентября 2005 г .
; 39 (17): 6792-9. doi: 10.1021/es048345v.
Технологии экологических наук. 2005.
PMID: 161Всесторонний обзор водоэмульгированного дизельного топлива: химический состав, характеристики двигателя и выбросы выхлопных газов.
Джхалани А., Шарма Д., Сони С.Л., Шарма П.К., Шарма С. Джхалани А. и др. Environ Sci Pollut Res Int. 2019 февраля; 26 (5): 4570-4587. doi: 10.1007/s11356-018-3958-y. Epub 2019 6 января. Environ Sci Pollut Res Int. 2019. PMID: 30612375 Обзор.
Свойства и влияние органических добавок на производительность и характеристики выбросов дизельного двигателя: всесторонний обзор.
Кумар С., Рана К.Б., Трипати Б., Найяр А. Кумар С. и др. Environ Sci Pollut Res Int. 2018 августа; 25 (23): 22475-22498.


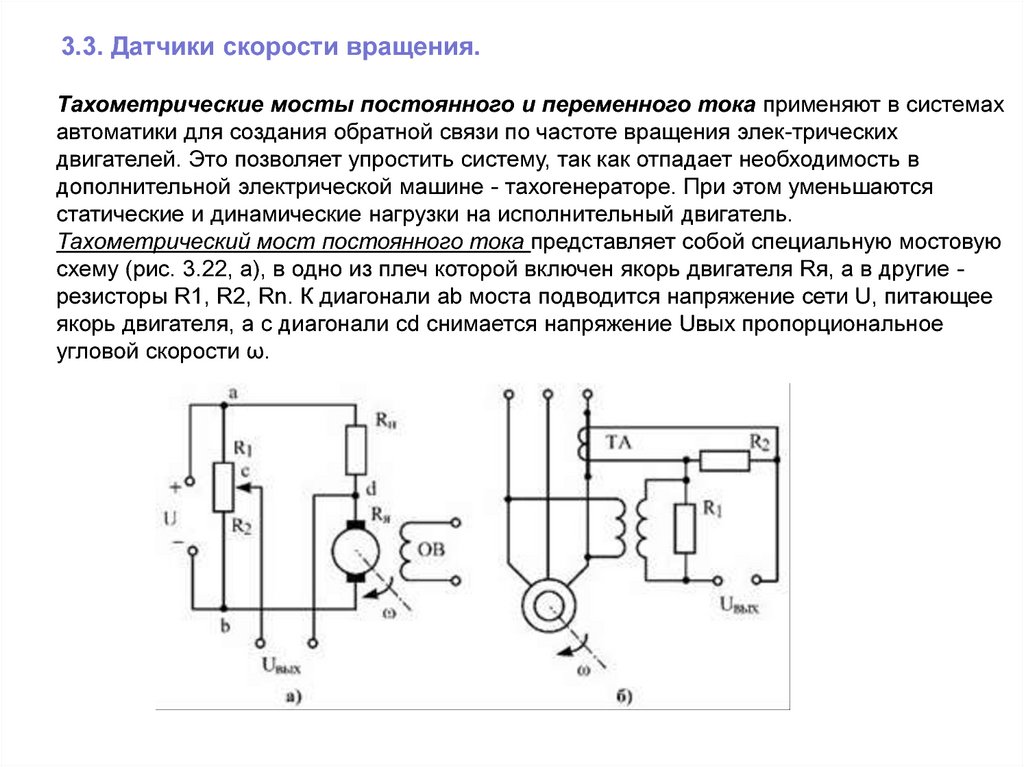

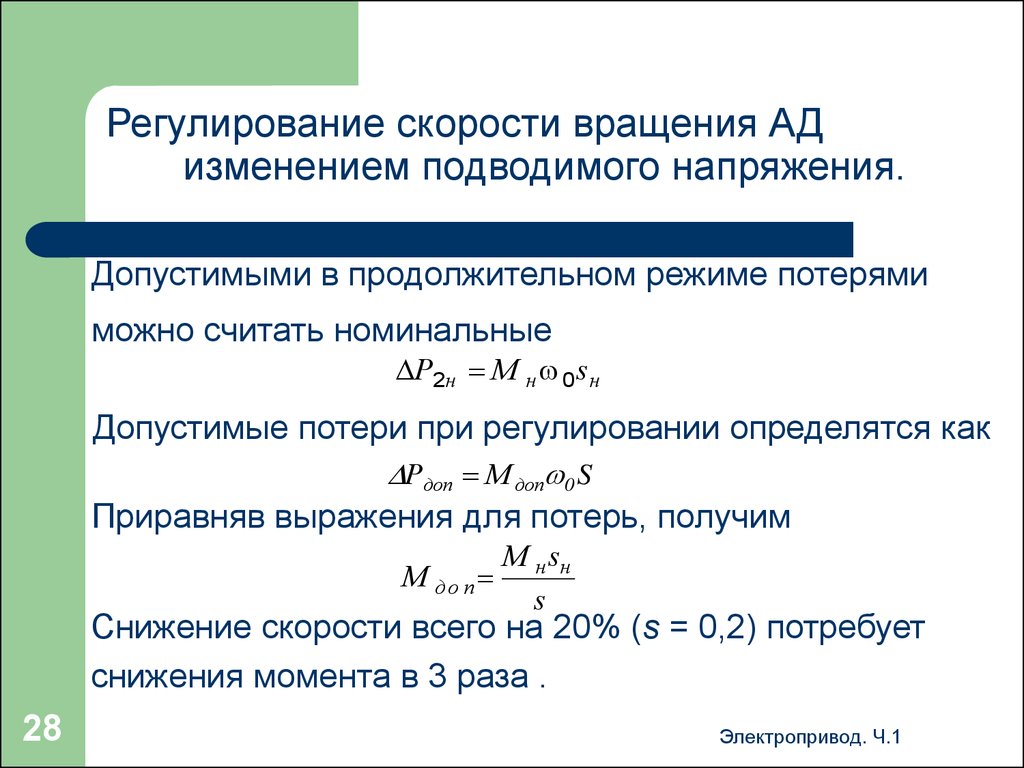 Например, если вы знаете, что будете на шоссе, вы можете захотеть, чтобы ваш двигатель вращался на более низкой частоте вращения для большей экономии топлива и уменьшения вибраций, и поэтому вам будет полезно немного снизить его передачу.
Например, если вы знаете, что будете на шоссе, вы можете захотеть, чтобы ваш двигатель вращался на более низкой частоте вращения для большей экономии топлива и уменьшения вибраций, и поэтому вам будет полезно немного снизить его передачу.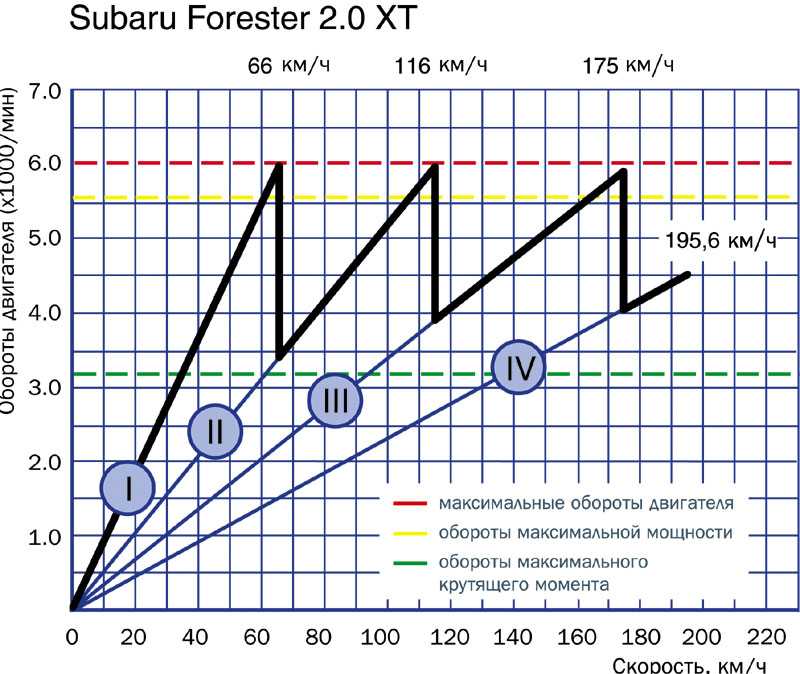 Видишь, мы все можем поладить.
Видишь, мы все можем поладить.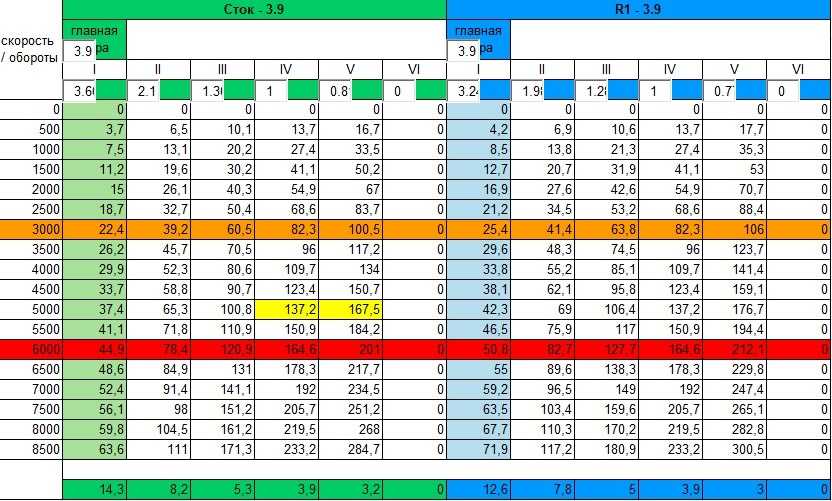 Окружность шины становится 6,92 фута или 6 футов 11 дюймов.
Окружность шины становится 6,92 фута или 6 футов 11 дюймов.
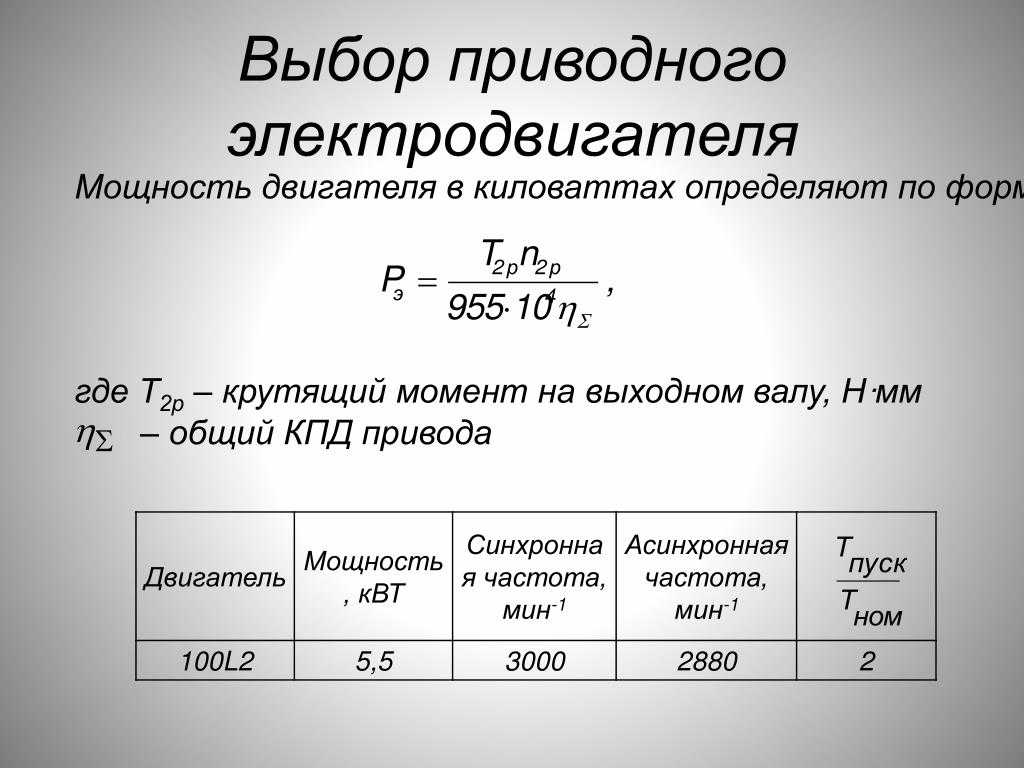 Стандартные V4, V4 S и V4 SP имеют 1103-кубовый V4, но V4 R имеет 998-кубовый V4. У него выше обороты, и, следовательно, у велосипеда другая передача.
Стандартные V4, V4 S и V4 SP имеют 1103-кубовый V4, но V4 R имеет 998-кубовый V4. У него выше обороты, и, следовательно, у велосипеда другая передача.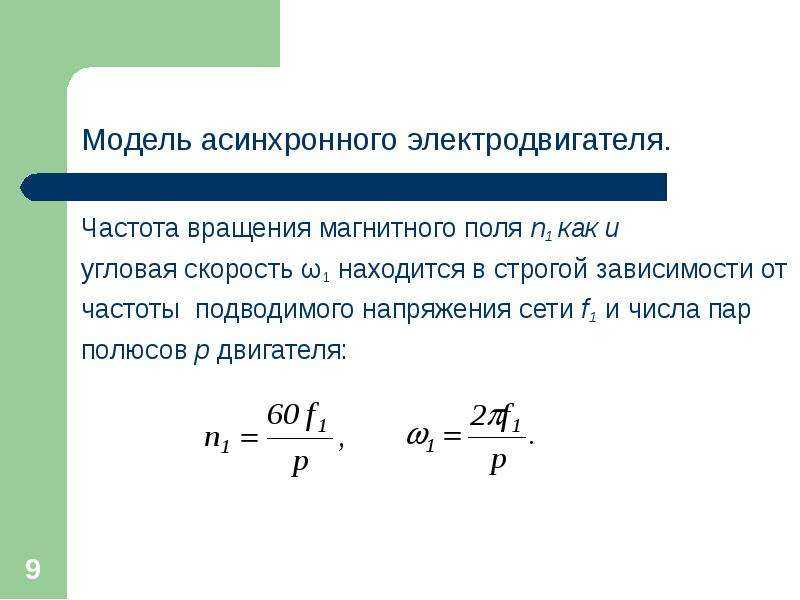
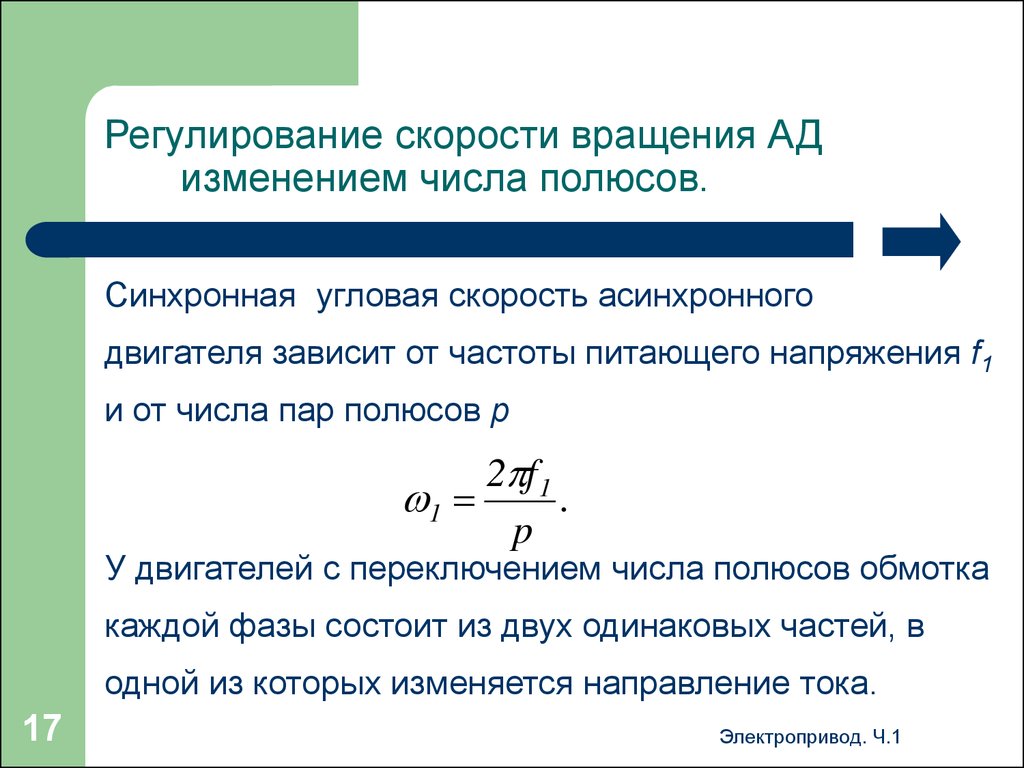
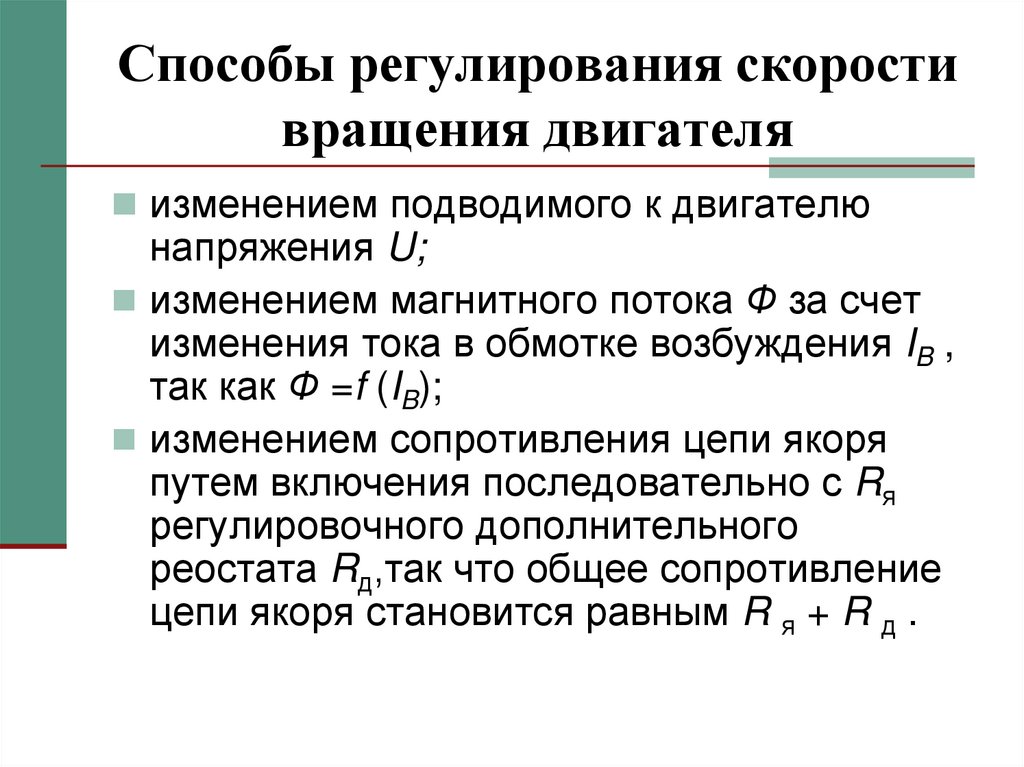 запись в 15:41 или 16:43, чтобы посмотреть, как это повлияет на передачу.
запись в 15:41 или 16:43, чтобы посмотреть, как это повлияет на передачу.
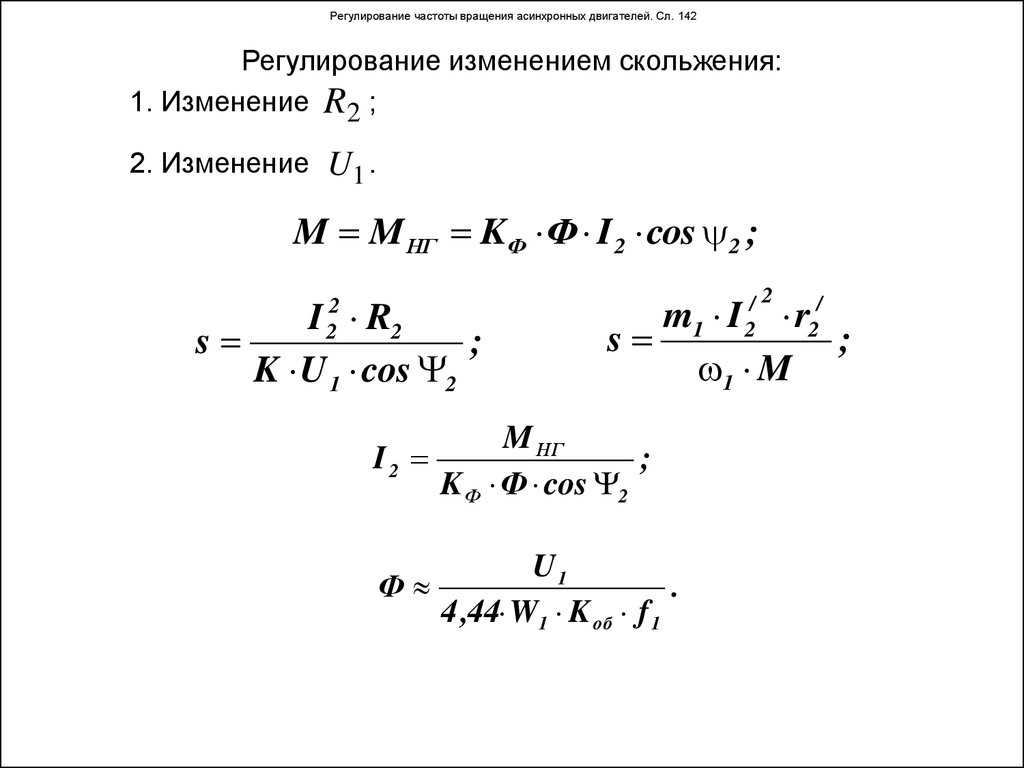 Например, мой Ducati Multistrada 1000 DS был создан для путешествий. Но я в основном ездил на работу, поэтому боролся с первой передачей, из-за чего она немного тянула. Одно из решений - сменить редуктор.
Например, мой Ducati Multistrada 1000 DS был создан для путешествий. Но я в основном ездил на работу, поэтому боролся с первой передачей, из-за чего она немного тянула. Одно из решений - сменить редуктор.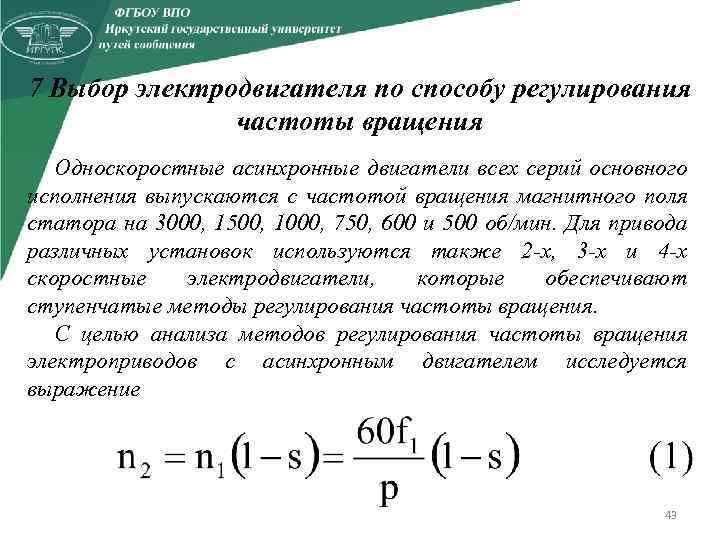
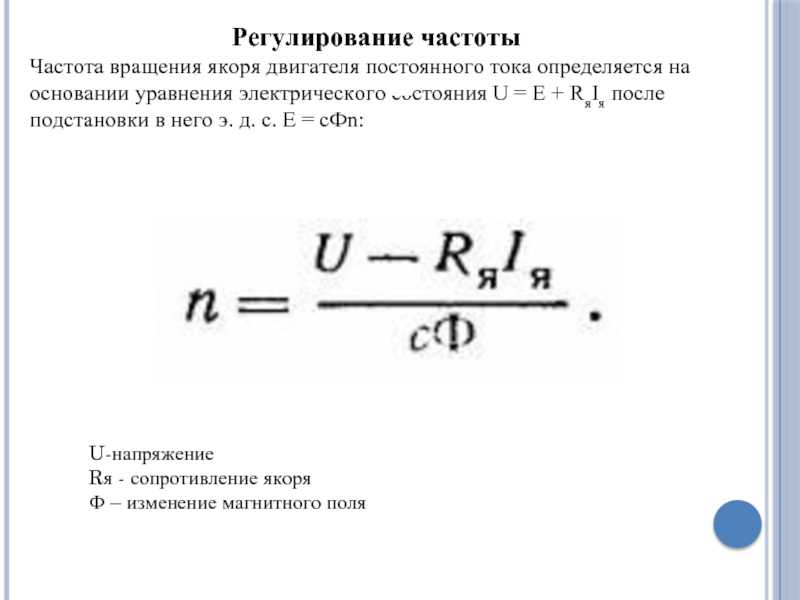
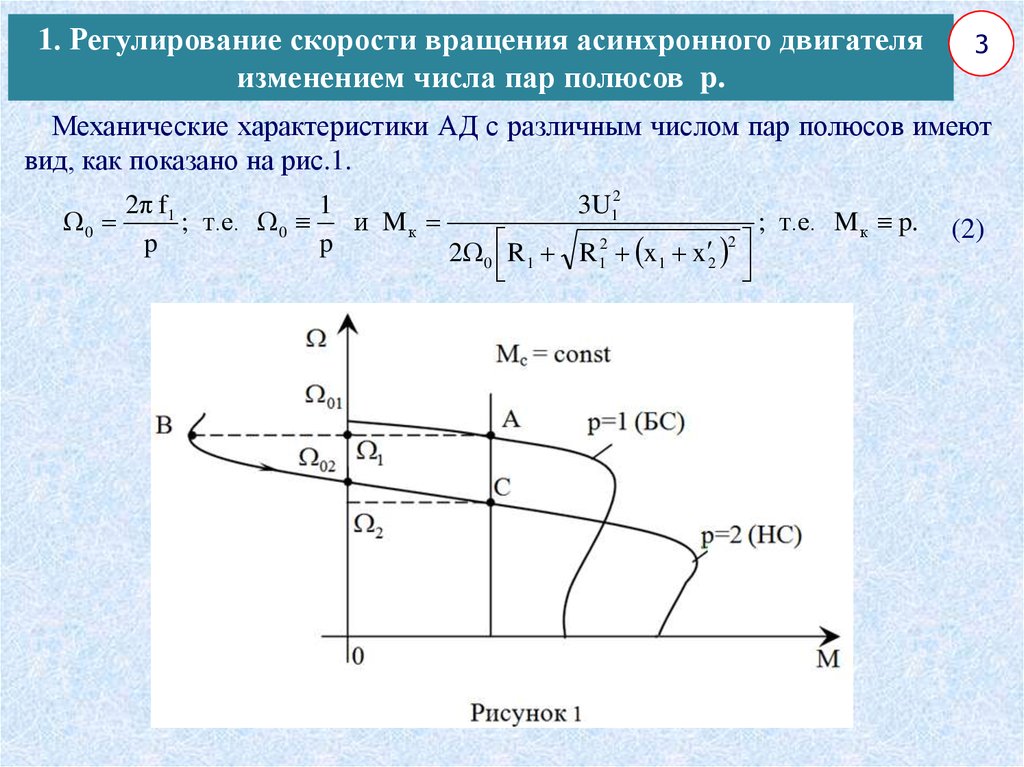
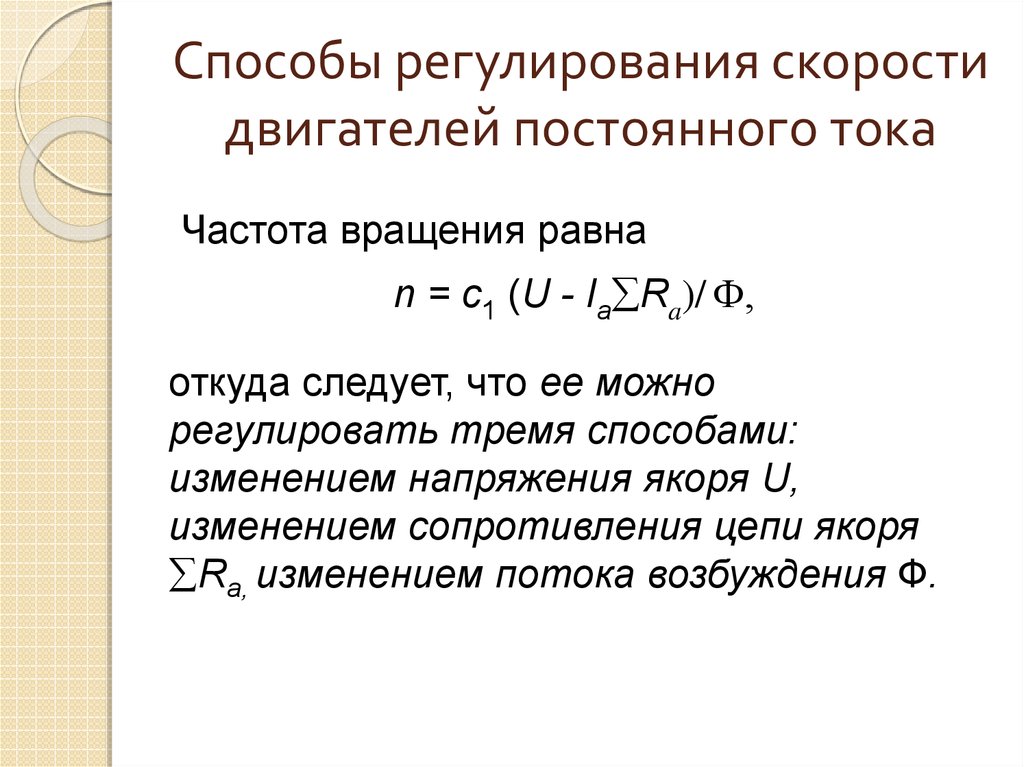
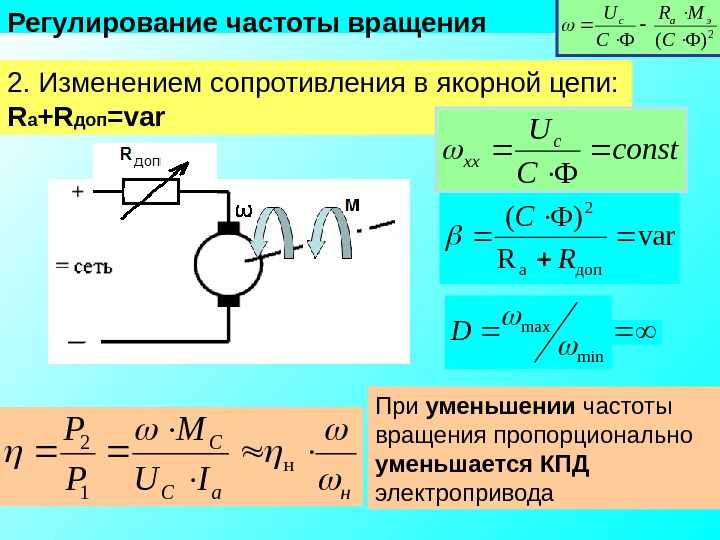 Из-за физических структурных различий трехфазные эмульсии М/В/М, по наблюдениям, давали более высокую температуру выхлопных газов, более высокую вязкость эмульсии и более низкий выброс CO по сравнению с двухфазной эмульсией В/М. . Кроме того, использование эмульсий типа В/М с содержанием воды более 20 % может привести к более раннему останову дизельных двигателей по сравнению с двигателями, работающими на эмульсиях типа М/В/М с таким же содержанием воды. Следовательно, предполагается, что эмульсии с содержанием воды более 20% не подходят для использования в качестве альтернативного топлива для дизельных двигателей.
Из-за физических структурных различий трехфазные эмульсии М/В/М, по наблюдениям, давали более высокую температуру выхлопных газов, более высокую вязкость эмульсии и более низкий выброс CO по сравнению с двухфазной эмульсией В/М. . Кроме того, использование эмульсий типа В/М с содержанием воды более 20 % может привести к более раннему останову дизельных двигателей по сравнению с двигателями, работающими на эмульсиях типа М/В/М с таким же содержанием воды. Следовательно, предполагается, что эмульсии с содержанием воды более 20% не подходят для использования в качестве альтернативного топлива для дизельных двигателей.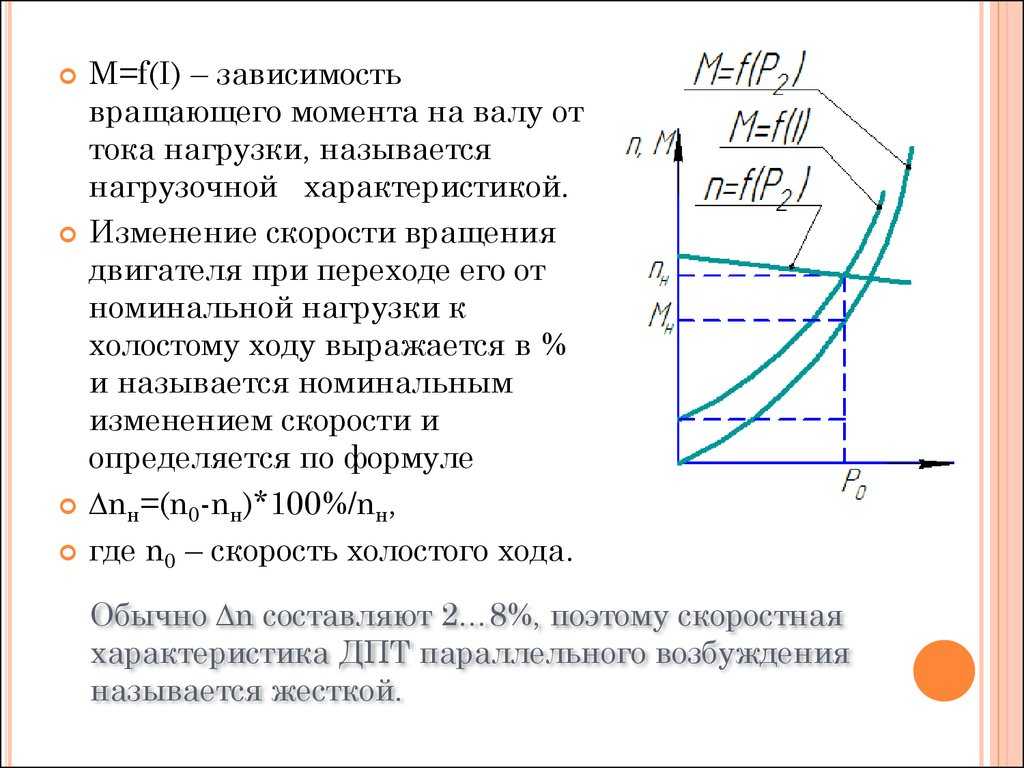 doi: 10.1007/s11356-018-3216-3. Epub 2018 28 сентября.
Environ Sci Pollut Res Int. 2018.
PMID: 30267344
doi: 10.1007/s11356-018-3216-3. Epub 2018 28 сентября.
Environ Sci Pollut Res Int. 2018.
PMID: 30267344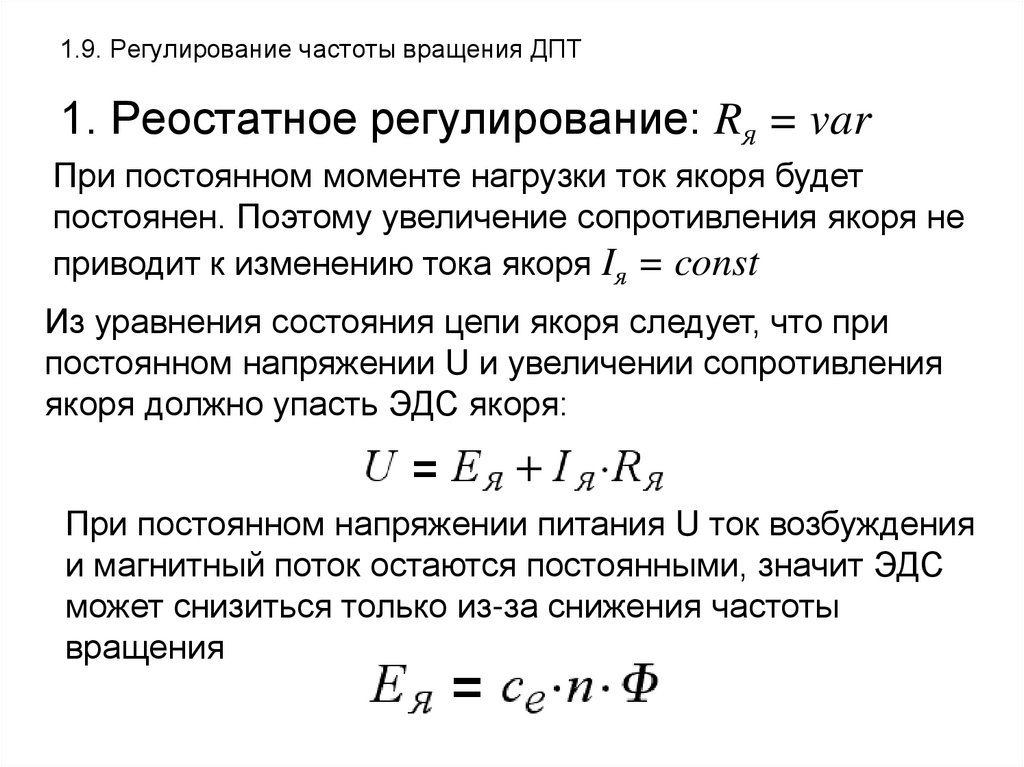 ; 39 (17): 6792-9. doi: 10.1021/es048345v.
Технологии экологических наук. 2005.
PMID: 161
; 39 (17): 6792-9. doi: 10.1021/es048345v.
Технологии экологических наук. 2005.
PMID: 161