
Управление шаговым двигателем: способы управления
Шаговые двигатели являются неотъемлемой частью самых различных электромеханизмов, начиная от бытовой техники и заканчивая производственным оборудованием. Управление шаговым двигателем осуществляется с помощью внешнего оборудования, в качестве которого может выступать как простой контроллер ШД, так и сложная система во главе с ПК, к которому подключается блок управления шаговым двигателем.
Способы управления шаговым двигателем
Независимо от того, какая схема управления использована, управление шаговым двигателем может осуществляться в одном из трёх режимов:
— полношаговом;
— полушаговом;
— микрошаговом.
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза; точки равновесия ротора идентичны полюсам статора. Данный режим имеет недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, между шагами включаются сразу обе. Такой режим коммутации очень популярен, однако следует отметить, что при его применение получение полного момента невозможно.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме, как и в полушаговом, работают две фазы, однако токи обмоток в данном случае распределяются неравномерно. В микрошаговом режиме шагового двигателя происходит смещение положения ротора и магнитного поля статора между полюсов. Величина микрошага зависит от конкретного устройства, составляя от трети полного шага и менее. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако коммутация несколько усложняется.
Купить шаговые двигатели и средства управления ШД в Stepmotor
В каталоге Stepmotor представлен широчайший ассортимент шаговых двигателей, а также систем управления шаговыми двигателями. Если вам необходимо купить шаговый двигатель, контроллер шагового двигателя или блок управления шаговым двигателем в наличии по доступней цене, удобнее всего оформить заказ на нашем сайте. Обратите внимание: используйте только те модели коммутационных устройств, которые совместимы с выбранной вами моделью ШД! Если вы не знаете, как выбрать контроллер для шагового двигателя, проконсультируйтесь у технического специалиста, позвонив по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
15. Шд. Управление шаговыми двигателями. Система коммутаторов.
 Основным элементом системы управления
шаговым двигателем (ШД) является
полупроводниковый коммутатор, который
переключает фазные токи Iф в обмотках
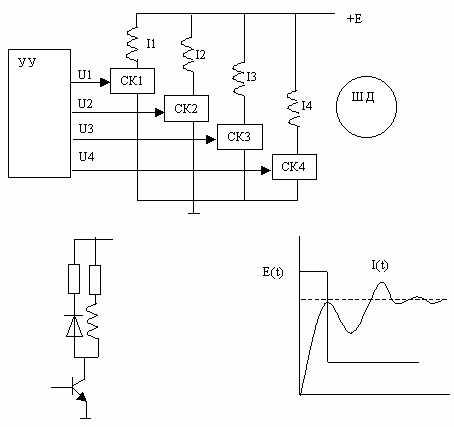
ШД, как показано на рис. 2-4.1. Типичная
схема силового ключа СК показана на
рис. 2-4.2,а,
Основным элементом системы управления
шаговым двигателем (ШД) является
полупроводниковый коммутатор, который
переключает фазные токи Iф в обмотках
ШД, как показано на рис. 2-4.1. Типичная
схема силового ключа СК показана на
рис. 2-4.2,а,
где диод VD и резистор Rр служат для ускорения спада фазного тока при отключении обмотки транзистором VT. Скорость нарастания фазного тока при включении VT зависит от величины напряжения питания E и постоянной времени цепи L/(R+Rдоб). Для увеличения быстродействия систесмы требуется увеличить скорость нарастания фазных токов при коммутации обмотки. Для этого используется ключ с форсировкой, схема которого приведена на рис. 2-4.2,б. Импульсное форсирование заключается в подключении обмотки фазы ШД к источнику форсирующего напряжения Е2 на время, необходимое для нарастания тока, а после этого обмотка подключается к источнику пониженного напряжения Е1, обеспечивающему поддержание заданного тока в обмотке. В этой схеме сперва включаются оба транзистора, а диод VD3 отделяет источник Е2 от источника Е1, затем транзистор VT1 отключается, и фазный ток идет от Е1 через диод VD3. Характер протекания переходных процессов в схеме показан на рис. 2-4.2, в.
Наилучшие энергетические соотношения в контуре управления ШД обеспечивает коммутатор с импульсной стабилизацией фазовых токов, схема которого показана на рисунке 2-4.3.а.
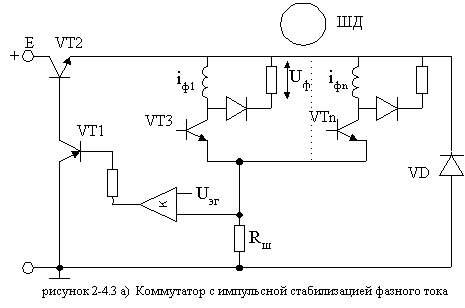
Часть схемы на транзисторах VT3-VTn представляет собой коммутатор, который питается от источника повышенного напряжения через импульсный стабилизатор тока состоящий из силового транзистора VT2, усилителя VT1, компаратора K и измерительного резистора Rш. В этой схеме повышенное напряжение питания E обеспечивает быстрое нарастание фазного тока, а импульсный стабилизатор ограничивает среднее значение тока в фазе Iф с помощью широтно-импульсной модуляции, как показано на рисунке 2-4.3.б.
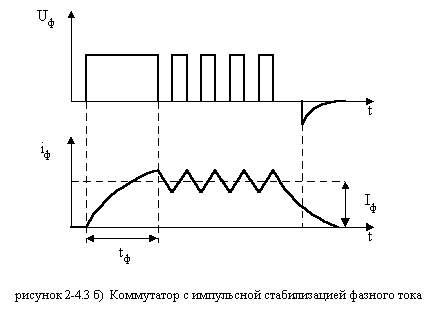
Действие такого коммутатора аналогично коммутатору с форсированием, однако время форсировки tф здесь задается автоматически за счет обратной связи через резистор Rш. Способы коммутации обмоток ШД
Параметры шагового привода зависят от способа коммутации. Наиболее распространенной является симметричная коммутация, при которой в каждый такт активизируется одинаковое число обмоток. На рисунке 2-4.4.а показана временная диаграмма одинарной симметричной коммутации для четырехфазного двигателя, когда в один такт активизируется одна фазная обмотка. Большое распространение имеет парная коммутация, при которой в каждый такт запитываются две смежные обмотки, как показано на рисунке 2-4.4.б .
| |
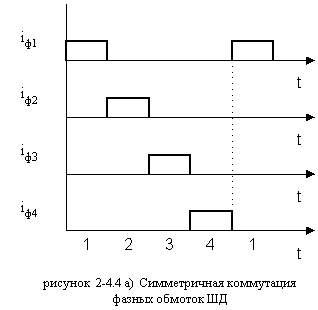
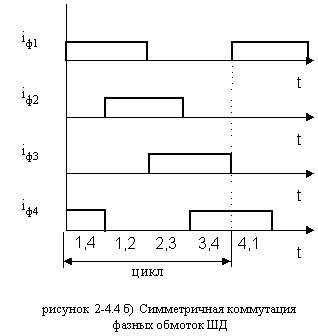
И в том и в другом случае количество тактов в цикле n равно количеству фаз двигателя m (в данном случае m = 4 ) и шаг двигателя одинаков при обоих способах коммутации.
При несимметричной коммутации возможно уменьшить шаг двигателя и тем самым увеличить точность привода. На рисунке 2-4.5.а показана временная диаграмма несимметричной
к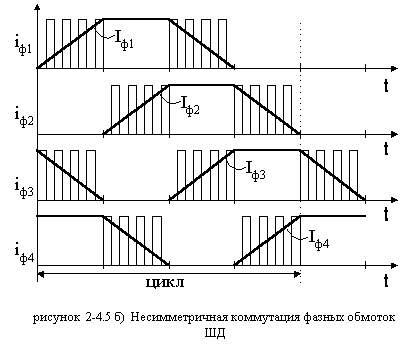 оммутации
с делением шага пополам — режим полушагов.
Цикл содержит восемь тактов (n = 2m), но
при этом в каждый включена либо одна
либо две обмотки, что приводит к колебаниям
вращающего момента ШД. С целью стабилизации
вращающего момента можно уменьшать
фазовый ток когда включены две фазы в
2 раз с помощью ШИМ, как показано на
рисунке 2-4.5.а пунктиром.
оммутации
с делением шага пополам — режим полушагов.
Цикл содержит восемь тактов (n = 2m), но
при этом в каждый включена либо одна
либо две обмотки, что приводит к колебаниям
вращающего момента ШД. С целью стабилизации
вращающего момента можно уменьшать
фазовый ток когда включены две фазы в
2 раз с помощью ШИМ, как показано на
рисунке 2-4.5.а пунктиром.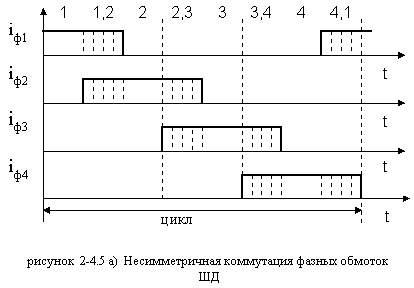
Здесь при каждом положении ротора соответствующем «мелкому» шагу одна обмотка постоянно включена, другая — постоянно выключена, а две остальные переключаются на несущей частоте с изменяемой скважностью. Величина мелкого шага зависит от количества изменения скважности. Например, если скважность задается двухразрядным счетчиком, то происходит дробление шага на 4 и цикл будет содержать 4*4=16 тактов.
Управление шаговым двигателем. Схема и описание
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением
В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель
Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.
Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.
Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
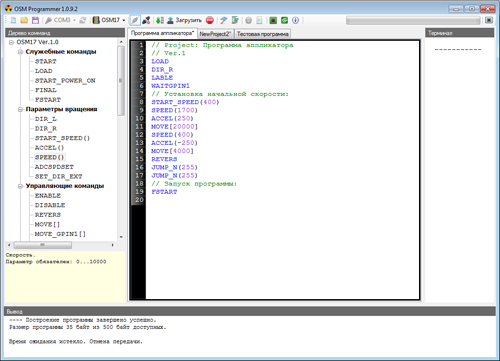
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Скачать программу управления шаговым двигателем (204,1 KiB, скачано: 1 874)
Шаговые двигатели. Принцип действия. Различные способы управления
Шаговые двигатели: принцип действия и отличия от двигателей постоянного тока
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
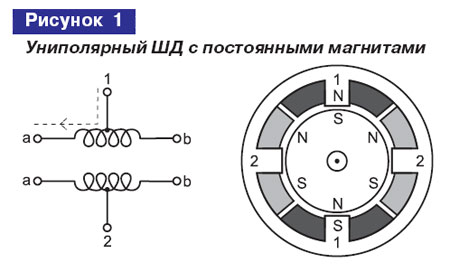
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
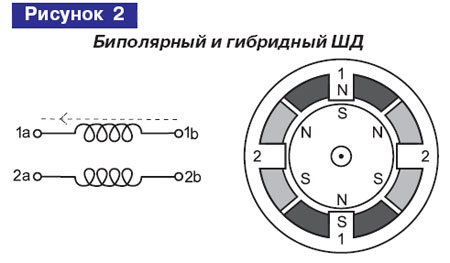
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
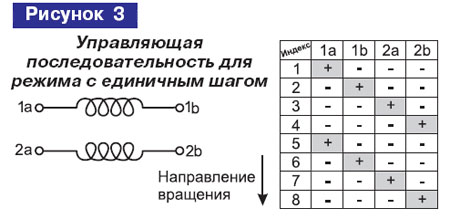
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
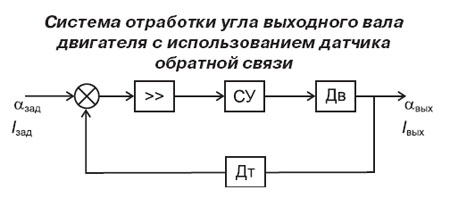
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
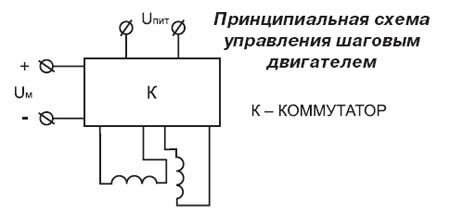
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.

Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».

Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.

При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
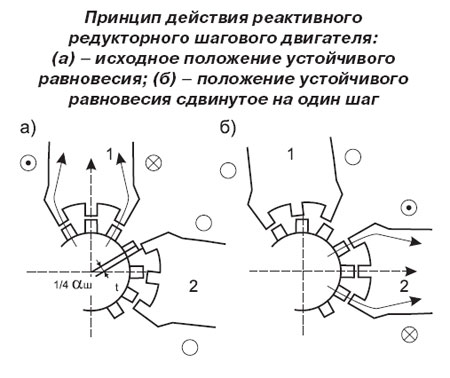
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
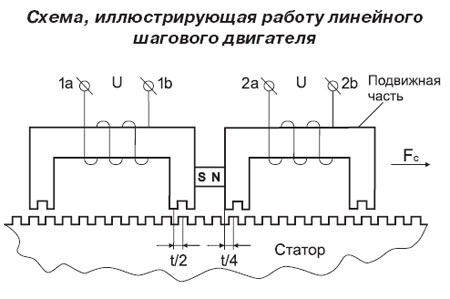
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
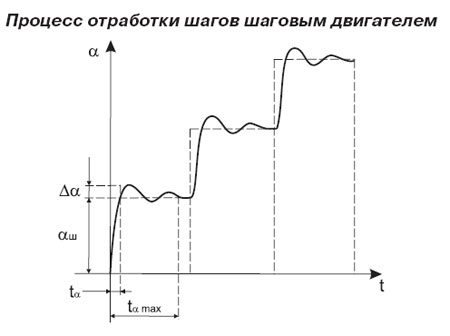
Режимы работы синхронного шагового двигателя
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
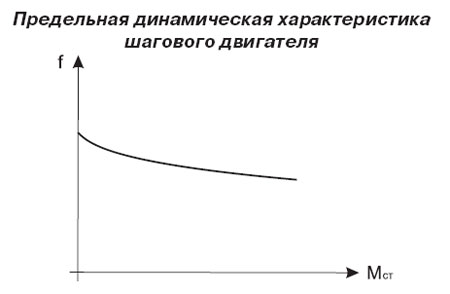
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.

Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
Автор: В. П. Колодийчик.
Журнал «Электротехнический рынок» №12 (18) декабрь 2007
FAQ • Устройство и управление шаговым двигателем
Определение

Шаговый двигатель — синхронный бесколлекторный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Для управления ШД используются специальные устройства — драйверы.
Описание и устройство
Более подробно про устройство и управление шаговым двигателем можно прочитать в википедии. В целом, его конструкция похожа на обычный бесколлекторный двигатель с ротором особой формы.
Виды ШД

В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в):

Особенности ШД
Важными свойствами ШД, о которых надо обязательно иметь четкое представление, являются
- Дискретность перемещений.
Основное свойство, из которого вытекают все остальные. Большинство моторов делает 200 или 400 шагов на оборот, однако конструкция ШД позволяет фиксировать ротор в промежуточных положениях, что позволяет добиться дробления шага до 800-10000(и даже более) шагов/оборот. - Ограниченная точность установки ротора
Подавляющее производимых ШД имеют погрешность при выполнении установки ротора в размере плюс-минус 5% от величины шага, т.е. для двигателя с шагом 1.8 град погрешность составит плюс-минус 5.4 минуты. На практике это означает, что, при дроблении шага 1:10 величина шага уже будет равна погрешности установки, и большие деления не обеспечат более точного перемещения. Единственным их применением остается повышение плавности работы ШД(см. ниже п. «Резонанс»). - Обратная зависимость момента от скорости.
Приближенно, можно говорить о том, что величина момента, помноженная на скорость вращения вала ШД — величина постоянная. С увеличением скорости вращения крутящий момент на валу падает пропорционально. - Резонанс ШД.
Преимущества шаговых двигателей
см. основную статью Шаговые двигатели или серводвигатели?
- Угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- Двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- Повторяемость. Как было сказано, шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
- Возможность быстрого старта/остановки/реверсирования
- Высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- Однозначная зависимость положения от входных импульсов обеспечивает позиционирование без использования обратной связи
- Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без редуктора
- Большой диапазон скоростей
- Низкая стоимость(по отношению к сервоприводам)
Недостатки шаговых двигателей
- Резонанс
- Возможен пропуск шагов, и как следствие — потеря контроля положения(ввиду отсутствия обратной связи)
- Потеря момента и стабильности на высоких скоростях
- Невысокая удельная мощность
Управление шаговым двигателем
Самый простой вариант: Есть четыре электромагнитные катушки A, B, A’, B’. Если по ним пропускать ток — они становятся магнитами (катушки А и В активны при “прямом” направлении тока, A’ и B’ — при “обратном”). Есть колесо с зубчиками (например, зубчик один — стрелка). Зубчик притягивается к той катушке, по которой пропускают ток. Таким образом, если последовательно включать ток в катушках, то стрелка будет совершать вращательное движение. Чтобы сделать это движение более плавным, можно добавлять зубчики, можно катушки, а можно и то и другое — принцип остаётся тот же, меняется только тяга и угол поворота за один вкл/выкл. Обычно используется следующая конфигурация: катушки выстраиваются по четыре вдоль периметра вращения, на каждую четвёрку есть по зубцу, таким образом есть шестерёнка и много катушек вокруг неё. Рассмотрим самую простую модель с четырьмя катушками и одним зубчиком. Подумаем, какими способами можно вращать стрелку. Допустим, начальное её положение — у B’. 1. Самое очевидное: Включаем А: стрелка останавливается напротив А. Выключаем А, включаем В: стрелка идёт к В и останавливает напротив. Выключаем В, включаем A’: стрелка останавливает уже у A’. Выключаем A’, включаем B’: стрелка идёт к B’ и останавливает напротив. Выключаем B’, включаем А: стрелка останавливается напротив А. и т.д.
За каждый раз раз совершается вращение в 90 градусов, полный круг, соответственно, за четыре раза. Быстро, но очень резко. Чем плохо: Резко, потому шумно. Сразу большой угол поворота, поэтому в зависимости от груза инерция может быть большой, и разогнавшаяся стрелка не остановится сразу, поэтому нужна бОльшая задержка перед тем, как выключить текущую катушку и включить следующую. Из-за проблемы выше, если скорость сделать слишком большой, можно потерять контроль над вращением, и у вас что-нибудь куда-нибудь улетит или движение станет совсем уж странным. Чем хорошо: относительно просто реализуемо.
2. Чуть-чуть менее очевидное решение: Включаем А и B’: стрелка останавливается между А и B’, ровно посередине. Выключаем B’, включаем В: стрелка фиксируется между А и В. Выключаем А, включаем A’: стрелка между В и A’. Выключаем В, включаем B’: стрелка останавливается между A’ и B’. Выключаем A’, включаем А: стрелка между B’ и А. И т.д. За раз — те же 90 градусов, полный круг тоже за четыре раза. Тоже резко. Что плохо: Все то же, что и в предыдущем методе Плюс чуть-чуть сложнее в реализации, но не слишком. Что хорошо: Одновременно “в силе” сразу две катушки, то есть тяга гораздо лучше, чем у предыдущего метода. Соответственно, порог скорость + инерция, после которого мы теряем управление, становится выше по сравнению с первым методом.
3. Измельчим шаги: Пусть у нас для каждого мотора есть не только состояние вкл/выкл, а некая таблица состояний: a) 0% 50% 100% Здесь 50% означает, что сила тока в катушке 50% от максимальной. Можно ещё мельче: b) 0% 25% 50% 75% 100% Или ещё мельче. Тогда последовательность будет такой: B’ 100%, А 0% B’ 75%, А 25% B’ 50%, А 50% B’ 25%, А 75% B’ 0%, А 100% И то же самое для пар А-В, В-A’, A’-B’, B’-В Что плохо: Сложнее реализовать. Что хорошо: Шаг мельче, следовательно меньше шума и дребезжания, движение более плавное. Меньше проблем с инерцией и потерей управления. Можно сделать ещё мельче, и движение будет ещё плавнее.
4. Будем подавать ток аналоговым способом. Так сказать предельный случай при увеличении частоты разбиения до бесконечности. B’ плавно меняем от 100% до 0%, А от 0% до 100%, и так для всех пар А-В, В-A’, A’-B’, B’-В. Чем хорошо: Очень плавно, хороший контроль, хорошая тяга. И тишинааа. Чем плохо: Аналогово. Запатентовано.
5. Используем следующий вариант: Включаем B’ и А: стрелка между B’ и А. Выключаем B’: стрелка у А. Включаем В: стрелка между А и В. Выключаем А: стрелка у В. Включаем A’: стрелка между A’ и В. Выключаем В: стрелка у A’. Включаем B’: стрелка между B’ и A’. Выключаем A’: стрелка у B’ Включаем А: стрелка между B’ и А. И т.д. Отличается от “0%,50%,100%” шага 3 только тягой. 5 — сильнее.
Методы 1, 2, 3, 5 — стандартные, у них даже есть обозначения. Если считать положение “у катушки” за 1, а положение “между катушками” за 2, следующие обозначения станут понятными: Режим 1 будет называться 1 phase (полношаговый) (стрелка останавливается только на фазе “1”), но он почти не используется — тяга нехороша и вообще. Режим 2: 2 phase (полношаговый) (только на фазе “2”). Режим 5: 1-2 phase (полушаговый) (останавливаемся и на “1” и на “2”). Режим 3: В зависимости от частоты разбиения: 4 (Цикл от положения “перед катушкой” до “перед следующей катушкой” равен четырём шагам): 2W1-2 phase (2*2 = 4) 8: 4W1-2 phase (4*2 = 8) По-русски микрошаговый.
Режим 3-а никак не называется, потому что не используется, а метод 4 — запатентован.
РадиоКот :: Пропорциональное управление шаговым двигателем
РадиоКот >Схемы >Цифровые устройства >Автоматика >Пропорциональное управление шаговым двигателем
Описываемое ниже устройство позволяет управлять униполярным шаговым двигателем типа СДХ 1,8/40 и аналогичным. Схема электрическая принципиальная блока управления изображена на рис.1. Он выполнен на базе микроконтроллера ATmega 8 работающего от встроенного тактового генератора на частоте 2 МГц. В качестве ключей, коммутирующих обмотки шагового двигателя М1, использованы логические элементы микросхем DD2, DD3 типа SN75452 (русский аналог — К155ЛА18). Это микросхемы – повышенной мощности с открытым коллекторным выходом.
Блок поддерживает пропорциональное и дискретное управление мотором. В режиме пропорционального управления — угол поворота ротора двигателя, задается переменный резистором R1. В режиме дискретного управления — вращение двигателя «влево», «вправо», «стоп» осуществляется кнопками S1 и S2. Кроме этого, в схеме можно выбирать шаговый или полушаговый режим работы, а также скорость вращения двигателя.
Установкой перемычки X4 выбирается пропорциональное управление, а при ее отсутствии – дискретное управление. Перемычкой X5 определяется шаговый и полушаговый режим работы двигателя. Все эти режимы работы инициализируются только в момент включения схемы или сброса микроконтроллера. Поэтому нужные перемычки необходимо установить перед включением питания. В микроконтроллере задействованы два канала АЦП. На вход одного из них – ADC5 (28 ножка) подключен подстроечный резистор R3. С его помощью регулируется скорость вращения двигателя при любом режиме работы схемы.
В режиме пропорционального управления задействуется еще один канал АЦП – ADC4 (27 ножка). На его вход через интегрирующую цепь R2, C1 подключен переменный резистор R1, который задает угол поворота ротора мотора. Скорость работы АЦП в данной управляющей программе осуществляет преобразования с 8 — битной точностью. Поэтому положение ручки переменного резистора R1 программа контроллера условно разбивает на 255 шагов. После включения питания, программа выполняет калибровку положения ротора шагового двигателя. Для этого, перед началом работы, автоматически выполняется команда «вращение двигателя влево» до тех пор, пока флажок, закрепленный на роторе мотора, не «доедет» до концевого датчика (оптопары) VT1, HL1. При поступлении сигнала с датчика VT1, программа обнуляет регистр-счетчик количества шагов двигателя, измеряет напряжение на выходе переменного резистора R1, преобразует его в цифровой код в диапазоне от 0 до 255, записывает его в старший байт регистра результата преобразования АЦП (это количество шагов переменного резистора R1), а затем сравнивает его содержимым регистра-счетчика количества шагов двигателя. Если число шагов резистора R1 больше чем шагов двигателя М1, то выдается команда: «вращение двигателя вправо». При этом с каждым шагом ротора происходит инкремент счетчика шагов двигателя и его сравнение с числом в регистре АЦП (шаги резистора R1). Когда число шагов двигателя станет равно числу в регистре АЦП, выполняется команда: «стоп». Поворачивая ручку резистора R1 «влево», уменьшается уровень постоянного напряжения на входе АЦП. При этом число в регистре результата преобразования АЦП станет меньше чем текущее значение регистра — счетчика шагов. В этом случае выдается команда: «вращение двигателя влево». С каждым шагом двигателя происходит декремент регистра-счетчика шагов двигателя до тех пор, пока числа в обоих регистрах не станут равны. Таким образом, вращая ручку переменного резистора R1, ротор двигателя поворачивается в том же направлении и на такое же количество шагов.
Отмечу, что предлагаемый двигатель совершает один оборот на 360° за 200 шагов (т.е. один шаг – 1,8 град.). Следовательно, в данной схеме, за 255 условных шагов от переменного резистора R1, ротор мотора сделает более одного оборота и повернется на угол 459°. Поэтому для ограничения угла поворота двигателя используется концевой датчик (оптопара) для крайнего правого положения ротора. Он выполнен на элементах VT2, HL2. Для более точного копирования угла поворота ручки переменного резистора ротором двигателя необходимо установить в разрыв вывода сопротивления R1, подключенного к «+5 В», ограничительный резистор Rогр.. Его номинал следует тщательно подобрать (в пределах от 1 до 3 кОм).
В управляющей программе предусмотрена функция повторной калибровки положения ротора двигателя в процессе работы устройства. Например, в случае проскальзывания шагов ротора, по какой либо причине (двигатель перегружен, зацепился за что-то и т.д.), можно повернуть ручку переменного резистора R1 в крайнее левое положение и подождать 2 — 3 секунды. При этом происходит проверка положения флажка ротора с помощью оптического датчика крайнего левого положения VT1. Если флажок не зашел в зону срабатывания датчика, значит в процессе работы произошло смещение шагов ротора мотора М1 относительно шагов резистора R1. В этом случае запускается программа повторной калибровки системы, и работа устройства восстанавливается.
Для работы схемы в режиме пропорционального управления оптический датчик крайнего левого положения и калибровки VT1 — обязателен. Датчик крайнего правого положения VT2 можно не ставить, если нет необходимости в ограничении положения ротора при вращении вправо. Но, тогда, необходимо 14 вывод микроконтроллера подключить к +5 В.
При пропорциональном управлении двигателем в полушаговом режиме ротор совершает поворот в пределах от 0° до 230°. Мощность мотора уменьшается, зато увеличивается плавность хода. Это необходимо учитывать при выборе этого режима работы.
В режиме дискретного управления вращение «вправо» осуществляется кнопкой S1, вращение «влево» — кнопкой S2. Если кнопки не нажаты, выполняется команда «стоп». Программа калибровки двигателя и переменный резистор R1 в этом режиме не используются. Оптические датчики VT1, HL1 и VT2, HL2 работают как ограничители крайних положений ротора двигателя М1. Если ограничение вращения не требуется, то эти оптопары можно не ставить. Но при этом необходимо выводы 14, 15 микроконтроллера припаять к +5В.
В случае необходимости контроля над работой шагового двигателя другими (внешними) устройствами, в схеме предусмотрены специальные выходы на старших пинах порта D микроконтроллера. На выводе PD7 «step» формируется кратковременный импульс прямоугольной формы при каждом шаге двигателя (может пригодиться для внешнего счетчика шагов). Вывод PD6 «rewers» – сигнал реверса двигателя (лог. 0 — вращение вправо, лог. 1 – вращение влево). При обнулении (сбросе) программного счетчика — регистра количества шагов, на выводе PD5 формируется кратковременный импульс «reset». Эти выходы работают и в режиме пропорционального управления.
Управляющая программа для микроконтроллера написана на языке Ассемблер. Файл прошивки прилагается. Кроме этого, необходимо запрограммировать фьюзы: CKSEL0=0, CKSEL1=1, CKSEL2=0, CKSEL3=0, SUT0=0, SUT1=1, SKOPT=1.
Печатная плата блока управления изображена на рис. 2. Она изготовлена из одностороннего фольгированного стеклотекстолита размерами 42 × 58 мм. В прикрепленном файле с расширением .lay прилагается рисунок для «лазерно-утюжной» технологии изготовления платы. Расположение элементов схемы на печатной плате приведено на рисунке 3.
После установки микросхемы – стабилизатора DA1, к ней, необходимо прикрутить радиатор площадью не менее 4 см². Собранная конструкция представлена на фото. 1 и фото. 2.
Как уже отмечалось, логические микросхемы SN75452 можно заменить русским аналогом — К155ЛА18. Раньше они использовались в старых пятидюймовых флоппи дисководах вместе с предлагаемым шаговым двигателем.
Предлагаемый блок может быть использован в различных устройствах с электромеханическим приводом. Например, у меня два таких модуля с шаговыми двигателями пропорционально управляют видеокамерой наблюдения с удаленным доступом по двум осям координат. Один мотор поворачивает камеру по оси Х, другой – по оси Y (фото. 3).
Видеоролик о работе девайса:
Файлы:
Печатная плата под ЛУТ
Рис. 1. Принципиальная схема
Файл прошивки
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Драйверы и контроллеры шагового двигателя
Для управления приводами требуется специальный драйвер шагового двигателя
Драйвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.
Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот. Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.