Синхронные детекторы для измерений сигналов низкого уровня
Введение
Синхронные детекторы способны извлекать слабые сигналы, находящиеся ниже уровня шума, что может быть полезно при измерении очень малых сопротивлений, поглощения или отражения света от источников на ярком фоне, измерении деформации — во всех случаях, где присутствует значительный уровень шума.
Во многих системах шум нарастает при уменьшении частоты и достигает максимума при нулевой частоте. Для примера: операционные усилители имеют фликкер-шум (1/f шум), а светотехнические измерения всегда зависят от меняющихся условий окружающей обстановки. Перемещение измерения от низкочастотного шума увеличивает соотношение сигнал/шум, что позволит детектировать сигналы с низким уровнем. Так, модуляция источника света с частотой несколько килогерц облегчает измерение отраженного света, что в ином случае было бы затруднено вследствие зашумленности полезного сигнала. На рис. 1 показано, как модуляция делает возможным восстановление сигнала, который в исходном виде был (имел значение) ниже уровня шума.
Рис. 1. Модуляция перемещает сигнал (в частотной области) из зашумленной области спектра
Существует несколько методов модуляции сигнала возбуждения. Самый простой из них — периодическое включение/выключение источника сигнала. Данный способ хорошо работает при управлении светодиодами, управлении напряжением питания мостовых тензодатчиков и в некоторых других схемах. С лампами накаливания, используемыми в аппаратуре спектроскопии, и в иных источниках возбуждающего излучения, которые нельзя быстро включать и выключать, модуляцию можно реализовать с помощью механического затвора.
Узкополосный полосовой фильтр убирает все, кроме интересующей полосы частот, позволяющей восстановить исходный сигнал, однако проектирование фильтра с требуемыми характеристиками на дискретных элементах бывает непростым делом. Альтернативным решением становится схема, в которой синхронный демодулятор выполняет перенос модулированного сигнала в область нулевой частоты, в то время как подавленные частотные составляющие не синхронизируются с опорным сигналом. Устройство, действующее на основе данного принципа, называется синхронным усилителем.
Устройство, действующее на основе данного принципа, называется синхронным усилителем.
На рис. 2 представлена простая схема применения синхронного усилителя. Источник излучения, модулированный с частотой 1 кГц, облучает тестовую поверхность. Фотодиод измеряет отраженный от данной поверхности световой поток, пропорциональный значению величины загрязнения. Опорный и измеренный сигналы представляют собой синусоидальные волны (гармоники) с одинаковой частотой и фазой, но разными амплитудами. Опорный сигнал, управляющий источником света, имеет фиксированное значение амплитуды, а амплитуда измеренного сигнала зависит от коэффициента отражения.
Рис. 2. Схема измерения величины загрязнения поверхности, реализованная на синхронном усилителе
Результатом перемножения двух синусоидальных сигналов является сигнал, содержащий суммарные и разностные гармоники. В данном случае исходные сигналы имеют одинаковую частоту, то есть в результате появится сигнал с нулевой частотой и сигнал с удвоенной частотой исходных сигналов. Минус указывает на изменение фазы сигнала на 180°. Фильтр нижних частот (low-pass filter) отфильтрует все, кроме сигнала на нулевой частоте.
Минус указывает на изменение фазы сигнала на 180°. Фильтр нижних частот (low-pass filter) отфильтрует все, кроме сигнала на нулевой частоте.
A sin(2πfmt)×B sin(2πfmt) = 1/2 AB–1/2ABcos(4πfmt).
Преимущество данного способа измерения наглядно проявляется, когда требуется измерить зашумленный входной сигнал. В результате перемножения модулированный сигнал перемещается обратно к нулевой частоте, в то время как остальные сигналы перемещаются на другие, отличные от нулевой, частоты. На рис. 3 показана ситуация, когда на входе измерительной системы присутствуют мощные источники шума на частотах 50 Гц и 2,5 кГц. Интересующий сигнал с очень низким уровнем модулируется синусоидой с частотой 1 кГц. Результатом умножения сигнала на входе системы с опорным сигналом будет нужный нам сигнал на нулевой частоте и побочные сигналы на частотах 950 Гц, 1050 Гц, 1,5 кГц, 2 кГц и 3,5 кГц. Как указано выше, сигнал с нулевой частотой содержит требуемую информацию, а фильтр низких частот может отфильтровать все остальные составляющие.
Рис. 3. Синхронная демодуляция «вытаскивает» слабый сигнал с частотой 1 кГц при наличии на входе мощных источников шума с частотой 50 Гц и 2,5 кГц
Любые шумовые составляющие, расположенные в частотной области близко к полезному сигналу, появятся на частотах, находящихся близко к нулевой частоте, поэтому крайне важно выбрать такую частоту модуляции, вблизи которой нет сильных источников шума. Если это невозможно, рекомендуется применить фильтр нижних частот с весьма малой частотой среза и большой крутизной частотной характеристики, пусть и с большим временем установления сигнала.
Практическое исполнение синхронных схем обработки сигнала
Модуляция источника сигнала синусоидальным сигналом не всегда возможна, вот почему в некоторых случаях применяют модуляцию прямоугольной импульсной последовательностью. Генерация сигнала возбуждения прямоугольной формы значительно проще, нежели генерация синусоидальной волны, поскольку данная задача может быть решена довольно простым способом — например, с помощью вывода микроконтроллера, управляющего аналоговым ключом, или MOSFET.
На рис. 4 приведен простой вариант реализации синхронного усилителя. Микроконтроллер или иное устройство генерирует сигнал возбуждения — прямоугольную последовательность, который будет создавать отклик с датчика. Первый усилительный каскад является трансимпедансным усилителем в случае, если в качестве датчика используется фотодиод, или инструментальным усилителем, если усиливается сигнал с тензодатчика.
Рис. 4. Синхронный усилитель, использующий прямоугольную волну в качестве сигнала возбуждения
Схема коммутации сигнала возбуждения реализована на SPDT-ключе ADG609. Когда сигнал возбуждения принимает положительное значение, коэффициент усиления усилителя устанавливается равным +1. В периоде отрицательной полуволны коэффициент усилителя устанавливается равным –1. Математически эта операция эквивалентна умножению измеряемого сигнала на прямо-угольную волну. На выходе схемы RC-фильтр убирает прочие частотные составляющие сигнала, выходное напряжение сигнала с нулевой частотой равно половине размаха измеренной прямоугольной последовательности.
Несмотря на то, что схема простая, выбор подходящего операционного усилителя весьма важен. Входной каскад со связью по переменному току значительно уменьшает низкочастотный входной шум, но не устраняет фликкер-шум и смещение ошибки последнего усилителя. Прецизионный усилитель ADA4077-1, имеющий шум 250 нВ (пиковое значение) в полосе частот от 0,1 до 10 Гц и дрейф смещения 0,55 мкВ/°C, является идеальным выбором для данной схемы.
Синхронный усилитель, использующий прямоугольную последовательность, прост, но обладает худшей способностью к устранению шумов, нежели усилитель, применяющий синусоидальную последовательность. На рис. 5 изображена частотная диаграмма сигнала возбуждения — прямоугольной последовательности и опорного сигнала. Прямоугольная последовательность состоит из бесконечной суммы синусоидальных волн, а ее спектр включает все нечетные гармоники. Перемножение двух прямоугольных последовательностей одинаковой частоты представляет собой перемножение каждой синусоидальной составляющей опорного сигнала с каждой синусоидальной составляющей измеряемого сигнала. Результатом будет сигнал с нулевой частотой, содержащий энергию всех гармоник прямоугольной последовательности. Нежелательные сигналы, находящиеся на частотах нечетных гармоник, не будут отфильтрованы, хотя и они уменьшатся на некоторую величину — в зависимости от того, на частоте какой гармоники они находятся. Соответственно, важно выбрать такую частоту модуляции, чтобы частоты ее составляющих не совпадали по частоте с известными источниками шума или гармониками (сигналами). Для устранения шума в линии, например, можно выбрать частоту сигнала модуляции в 1,0375 кГц, которая не совпадет с гармониками сигнала 50 или 60 Гц, а в отличие от сигнала модуляции 1 кГц, который будет иметь совмещение с двадцатой гармоникой 50 Гц периодического сигнала.
Результатом будет сигнал с нулевой частотой, содержащий энергию всех гармоник прямоугольной последовательности. Нежелательные сигналы, находящиеся на частотах нечетных гармоник, не будут отфильтрованы, хотя и они уменьшатся на некоторую величину — в зависимости от того, на частоте какой гармоники они находятся. Соответственно, важно выбрать такую частоту модуляции, чтобы частоты ее составляющих не совпадали по частоте с известными источниками шума или гармониками (сигналами). Для устранения шума в линии, например, можно выбрать частоту сигнала модуляции в 1,0375 кГц, которая не совпадет с гармониками сигнала 50 или 60 Гц, а в отличие от сигнала модуляции 1 кГц, который будет иметь совмещение с двадцатой гармоникой 50 Гц периодического сигнала.
Рис. 5. В случае если входной (а) сигнал и опорный (б) являются прямоугольными последовательностями, их умножение (в) друг на друга позволит эффективно демодулировать каждую гармонику входного сигнала
Несмотря на описанное выше ограничение, схема проста и имеет малую стоимость. Использование малошумящего усилителя и правильный выбор частоты модуляции сделает схему измерения значительно совершеннее, чем попытка достичь подобных параметров, просто измеряя сигнал нулевой частоты.
Использование малошумящего усилителя и правильный выбор частоты модуляции сделает схему измерения значительно совершеннее, чем попытка достичь подобных параметров, просто измеряя сигнал нулевой частоты.
Альтернативный вариант — простой и интегрированный
Схема, приведенная на рис. 4, содержит операционный усилитель, ключ, несколько дискретных компонентов и требует сигнала тактирования с микроконтроллера. Альтернативный вариант — использовать интегрированный синхронный демодулятор, показанный на рис. 6. Микросхема ADA2200 содержит буферный вход, программируемый БИХ-фильтр, умножитель и блок сдвига опорного сигнала на 90°, делающий возможным измерение или компенсацию фазового сдвига между опорным и измеренным сигналами.
Рис. 6. Структурная схема ADA2200
Реализация схемы синхронного детектирования на ADA2200, приведенной на рис. 7, проста и дополнительно требует только источника тактового сигнала с частотой в 64 раза большей частоты опорного сигнала. Исходная настройка программируемого фильтра определяет его как полосовой фильтр, что устраняет необходимость реализации связи по переменному току. Аналоговый выход выводит полученные в результате умножения сигналов составляющие «зеркального» канала (images) относительно частоты выборки, поэтому для устранения нежелательных составляющих используется RC-фильтр, что позволяет измерять сигма-дельта АЦП только демодулированный сигнал на нулевой частоте.
Исходная настройка программируемого фильтра определяет его как полосовой фильтр, что устраняет необходимость реализации связи по переменному току. Аналоговый выход выводит полученные в результате умножения сигналов составляющие «зеркального» канала (images) относительно частоты выборки, поэтому для устранения нежелательных составляющих используется RC-фильтр, что позволяет измерять сигма-дельта АЦП только демодулированный сигнал на нулевой частоте.
Рис. 7. Синхронный усилитель, реализованный на ADA2200
Улучшение схемы синхронизации, использующей сигнал прямоугольной последовательности
На рис. 8 изображено усовершенствование схемы с модуляцией прямоугольной последовательностью. Датчик возбуждается прямоугольной последовательностью, а измеренный сигнал умножается с синусоидальной волной с такой же частотой и фазой. Затем, когда часть сигнала на основной частоте «переместится» на нулевую частоту, в то время как все остальные гармоники переместятся на частоты, отличные от нулевой, это позволит отфильтровать фильтром нижних частот все сигналы, кроме измеренного сигнала (с нулевой частотой).
Рис. 8. Использование синусоидальной волны в качестве опорного сигнала предотвращает появление шума от демодуляции на нулевой частоте
Дополнительная сложность состоит в том, что любой фазовый сдвиг между опорным и измеренными сигналами приводит к уменьшению значения выходного сигнала, в отличие от ситуации, когда сигналы полностью совпадают по фазе. Это может произойти, если схема согласования сигнала датчика содержит фильтры, которые вносят фазовую задержку. В схеме с аналоговым синхронным усилителем единственный способ справиться с этим — включить в цепь опорного сигнала схему фазовой компенсации. Задача нетривиальная, поскольку схема должна быть настраиваемой, чтобы можно было компенсировать различную задержку, а также зависимость от температуры и точности используемых компонентов. Более простая альтернатива — включение в схему второй стадии умножения сигналов, дополнительного блока, реализующего умножение измеренного и опорного сигналов, сдвинутого на 90°. Результатом данного изменения станет возможность получить сигнал, независимый от фазы входного сигнала, рис. 9 поясняет это решение. На выходе умножителя (обеих операций умножения) получаются сигналы, пропорциональные синфазной (I) и квадратурной (Q) составляющей входного сигнала. Для вычисления амплитуды входного сигнала требуется просто найти корень из суммы квадратов I‑ и Q‑сигналов. Дополнительное преимущество данной архитектуры в том, что она позволяет вычислять разность фаз между сигналом возбуждения/опорным и входным сигналом.
Результатом данного изменения станет возможность получить сигнал, независимый от фазы входного сигнала, рис. 9 поясняет это решение. На выходе умножителя (обеих операций умножения) получаются сигналы, пропорциональные синфазной (I) и квадратурной (Q) составляющей входного сигнала. Для вычисления амплитуды входного сигнала требуется просто найти корень из суммы квадратов I‑ и Q‑сигналов. Дополнительное преимущество данной архитектуры в том, что она позволяет вычислять разность фаз между сигналом возбуждения/опорным и входным сигналом.
Рис. 9. Использование квадратурной версии опорного сигнала для вычисления амплитуды и фазы
Все синхронные усилители, о которых пойдет речь дальше, генерируют опорный сигнал для возбуждения датчика. Окончательное усовершенствование заключается в том, чтобы использовать внешний сигнал в качестве опорного. Например, на рис. 10 показана система, в которой используется широкополосный источник света — лампа накаливания для оценки оптических свойств поверхности. Система измеряет параметры, позволяющие оценить коэффициент отражения зеркала или загрязнение поверхности. В данном случае применение механического затвора (диска) для модуляции значительно проще, нежели построение схемы с электронной модуляцией. С помощью недорогого датчика положения, установленного на механическом затворе, генерируется сигнал прямоугольной последовательности, который подается на синхронный усилитель. Вместо того чтобы использовать данный сигнал непосредственно, с помощью схемы ФАПЧ генерируется синусоидальный сигнал с той же частотой и фазой, что и исходный. Важное условие реализации данной идеи состоит в том, что у сгенерированного синусоидального сигнала должен быть низкий уровень искажений.
Система измеряет параметры, позволяющие оценить коэффициент отражения зеркала или загрязнение поверхности. В данном случае применение механического затвора (диска) для модуляции значительно проще, нежели построение схемы с электронной модуляцией. С помощью недорогого датчика положения, установленного на механическом затворе, генерируется сигнал прямоугольной последовательности, который подается на синхронный усилитель. Вместо того чтобы использовать данный сигнал непосредственно, с помощью схемы ФАПЧ генерируется синусоидальный сигнал с той же частотой и фазой, что и исходный. Важное условие реализации данной идеи состоит в том, что у сгенерированного синусоидального сигнала должен быть низкий уровень искажений.
Рис. 10. Использование схемы ФАПЧ для захвата частоты внешнего опорного сигнала
Хотя данная схема может быть реализована на дискретных компонентах — ФАПЧ и умножителе, использование FPGA (микросхемы программируемой логики) в построении подобной схемы дает значительные преимущества. На рис. 11 изображена схема синхронного усилителя, реализованная на FPGA, входной каскад которой построен на операционном усилителе с нулевым дрейфом смещения ADA4528-1 и 24‑разрядном сигма-дельта АЦП AD7175. Данное приложение не под-разумевает работу с широкополосными сигналами, поэтому эквивалентная ширина шумовой полосы частот синхронного усилителя может быть определена в 50 Гц. В качестве тестируемого устройства используется любой датчик, который можно возбуждать внешним сигналом. Схема усилителя реализует коэффициент усиления, равный 20, что позволяет полностью применить динамический диапазон АЦП. Хотя ошибки смещения постоянного уровня не оказывают влияния на измерения, важно минимизировать дрейф смещения и фликкер-шум, так как они уменьшают доступный динамический диапазон, особенно если схема усилителя обеспечивает высокий коэффициент усиления.
На рис. 11 изображена схема синхронного усилителя, реализованная на FPGA, входной каскад которой построен на операционном усилителе с нулевым дрейфом смещения ADA4528-1 и 24‑разрядном сигма-дельта АЦП AD7175. Данное приложение не под-разумевает работу с широкополосными сигналами, поэтому эквивалентная ширина шумовой полосы частот синхронного усилителя может быть определена в 50 Гц. В качестве тестируемого устройства используется любой датчик, который можно возбуждать внешним сигналом. Схема усилителя реализует коэффициент усиления, равный 20, что позволяет полностью применить динамический диапазон АЦП. Хотя ошибки смещения постоянного уровня не оказывают влияния на измерения, важно минимизировать дрейф смещения и фликкер-шум, так как они уменьшают доступный динамический диапазон, особенно если схема усилителя обеспечивает высокий коэффициент усиления.
Рис. 11. Реализованная на FPGA схема синхронного усилителя
Максимальное смещение усилителя ADA4528-1 достигает 2,5 мкВ и равно значению в 10 ppm входного диапазона полной шкалы аналогового входа AD7175 при опорном напряжении в 2,5 В. Цифровой фильтр верхних частот после АЦП устраняет напряжение смещения и низкочастотный шум. Для определения шума на выходе в первую очередь следует вычислить плотность AD7175. В технической документации указано среднеквадратическое значение шума в 5,9 мкВ при скорости преобразования в 50 kSPS, использовании sinc5+sinc1 фильтра и входного буфера. Эквивалентная ширина полосы шума при этих условиях составляет 21,7 кГц, что дает плотность шума 40 нВ/√Гц.
Цифровой фильтр верхних частот после АЦП устраняет напряжение смещения и низкочастотный шум. Для определения шума на выходе в первую очередь следует вычислить плотность AD7175. В технической документации указано среднеквадратическое значение шума в 5,9 мкВ при скорости преобразования в 50 kSPS, использовании sinc5+sinc1 фильтра и входного буфера. Эквивалентная ширина полосы шума при этих условиях составляет 21,7 кГц, что дает плотность шума 40 нВ/√Гц.
Широкополосный шум ADA4528 с плотностью 5,9 нВ/√Гц проявляется на выходе с величиной 118 нВ/√Гц, давая в результате суммарную плотность шума в 125 нВ/√Гц. Поскольку цифровой фильтр имеет эквивалентную ширину шумовой полосы частот в 50 Гц, выходной шум достигает среднеквадратического значения 881 нВ. При диапазоне входного сигнала ±2,5 В динамический диапазон системы равен 126 дБ. Ширина полосы частот системы может быть использована для изменения динамического диапазона путем настройки времени отклика фильтра нижних частот, то есть корректировкой его частотной характеристики. К примеру, установка ширины полосы в 1 Гц даст динамический диапазон в 143 дБ, а ширина полосы частот в 250 Гц будет соответствовать динамическому диапазону в 119 дБ.
К примеру, установка ширины полосы в 1 Гц даст динамический диапазон в 143 дБ, а ширина полосы частот в 250 Гц будет соответствовать динамическому диапазону в 119 дБ.
Схема цифровой ФАПЧ захватывает сигнал возбуждения и генерирует синусоидальную волну, причем сигнал возбуждения может быть как внешним, так и внутренним и иметь различную форму, не обязательно синусоидальную. Все гармонические составляющие опорного сигнала синусоидальной формы перемножаются с входным сигналом, вследствие чего демодулированный шум и другие нежелательные составляющие сигнала появятся на частоте гармоник, как в случае с перемножениями двух сигналов прямоугольной последовательности. Преимуществом использования цифровой схемы генерирования опорного синусоидального сигнала является очень малый уровень искажений, который достигается цифровой настройкой.
На рис. 12 изображены диаграммы сгенерированных цифровой схемой синусоидальных сигналов, имеющих 4-, 8-, 16‑ и 32‑разрядную точность. Очевидно, что, используя 4‑разрядную точность, можно получить результат, незначительно отличающийся от приведенного на рис. 5, однако ситуация резко изменяется, если повысить точность (разрядность) схемы (генератора). С точностью в 16 разрядов будет достаточно сложно реализовать аналоговую схему генератора с таким малым коэффициентом нелинейных искажений, а достичь результата цифровой схемы с 32‑разрядной точностью, которая имеет коэффициент нелинейных искажений менее 200 дБ, с аналоговым генератором просто невозможно. Кроме того, цифровые схемы генераторов имеют прекрасную повторяемость. Однократно сформированные в цифровой форме данные, введенные в FPGA, в дальнейшем не будут изменены вследствие дополнительных шумов или дрейфа.
5, однако ситуация резко изменяется, если повысить точность (разрядность) схемы (генератора). С точностью в 16 разрядов будет достаточно сложно реализовать аналоговую схему генератора с таким малым коэффициентом нелинейных искажений, а достичь результата цифровой схемы с 32‑разрядной точностью, которая имеет коэффициент нелинейных искажений менее 200 дБ, с аналоговым генератором просто невозможно. Кроме того, цифровые схемы генераторов имеют прекрасную повторяемость. Однократно сформированные в цифровой форме данные, введенные в FPGA, в дальнейшем не будут изменены вследствие дополнительных шумов или дрейфа.
Рис. 12. Синусоидальные волны, сгенерированные цифровой схемой с различной точностью (разрядностью)
После умножителей фильтры нижних частот устраняют все высокочастотные составляющие сигнала, и на выходе появляются синфазная и квадратурная составляющие сигнала. С эквивалентной шириной шумовой полосы шума 50 Гц нет необходимости производить выборку данных с частотой 250 kSPS. К фильтрам нижних частот также можно добавить фильтры, выполняющие операцию прореживания, чтобы уменьшить скорость вывода данных. Последний этап вычисления — вычисление из квадратурных составляющих амплитуды и фазы входного сигнала.
К фильтрам нижних частот также можно добавить фильтры, выполняющие операцию прореживания, чтобы уменьшить скорость вывода данных. Последний этап вычисления — вычисление из квадратурных составляющих амплитуды и фазы входного сигнала.
Заключение
Низкочастотные сигналы малого уровня, находящиеся ниже уровня шума, достаточно сложно измерить, однако применение технологии модуляции сигнала с последующим его восстановлением синхронным усилителем позволяет производить весьма точные измерения. В самом простом исполнении синхронный усилитель представляет собой операционный усилитель, включенный в схему с попеременно изменяемыми коэффициентами усиления. Хотя данная схема не обеспечивает наилучших шумовых характеристик, тем не менее она предпочтительнее обычной схемы измерения сигнала с нулевой частотой в силу простоты исполнения и малой стоимости реализации. Усовершенствование данной схемы заключается в применении синусоидальной волны в качестве опорного сигнала и включении в схему умножителя, однако эта схема имеет ограничение ввиду сложности ее построения на аналоговых компонентах. Наилучшую производительность реализует система с использованием малошумящего прецизионного сигма-дельта АЦП для оцифровки входного сигнала, схемы цифровой ФАПЧ для генерации опорного сигнала, дальнейшая обработка сигналов в которой осуществляется в цифровой форме.
Наилучшую производительность реализует система с использованием малошумящего прецизионного сигма-дельта АЦП для оцифровки входного сигнала, схемы цифровой ФАПЧ для генерации опорного сигнала, дальнейшая обработка сигналов в которой осуществляется в цифровой форме.
Ключевой синхронный детектор | NiceTV
Схемотехника 2003 №3
Принцип действия ключевого синхронного детектора поясняет рис. 1. Устройство имеет дифференциальный вход. Два равных детектируемых сигнала подаются в противофазе на быстродействующий электронный переключатель. Для простоты на рис. 1 переключатель изображён как механический. Будем считать, что он идеален, т. е. переключение происходит мгновенно и его сопротивление в замкнутом состоянии равно нулю. Работой переключателя управляет сигнал, обычно называемый опорным. Пусть опорный сигнал управляет работой переключателя так, что его подвижный контакт всегда соединяется с тем входом, на котором в данный момент существует положительное напряжение.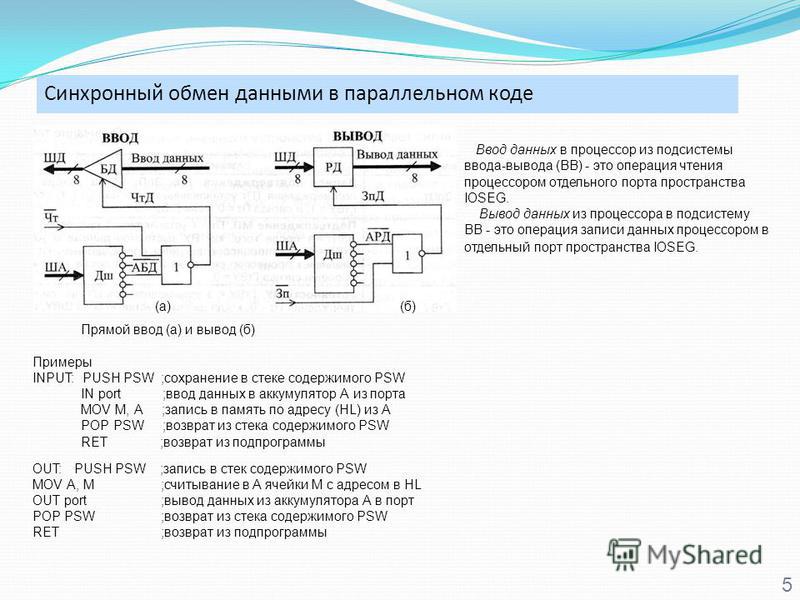 Такое возможно, если опорный сигнал синхронизирован с детектируемым, поэтому данный детектор и называют синхронным. Для определённости полезно ввести понятие угла фазового сдвига j между детектируемым и опорным сигналом, в данном случае j = 0. На выходе ключа получим сигнал, по форме совпадающий с двухполупериодно выпрямленным сигналом. Далее этот сигнал проходит через интегрирующую RC-цепочку, сглаживающую пульсации выпрямленного напряжения. На выходе цепочки напряжение будет равно
Такое возможно, если опорный сигнал синхронизирован с детектируемым, поэтому данный детектор и называют синхронным. Для определённости полезно ввести понятие угла фазового сдвига j между детектируемым и опорным сигналом, в данном случае j = 0. На выходе ключа получим сигнал, по форме совпадающий с двухполупериодно выпрямленным сигналом. Далее этот сигнал проходит через интегрирующую RC-цепочку, сглаживающую пульсации выпрямленного напряжения. На выходе цепочки напряжение будет равно
Рис.1.
Выпрямление произошло без участия нелинейных элементов. Здесь мы обнаруживаем первое замечательное свойство синхронного детектора — способность линейно детектировать при любой амплитуде детектируемого сигнала. Этим он чрезвычайно привлекателен для многочисленных применений. К сожалению, не всегда можно реализовать синхронный опорный сигнал. Если фазу опорного сигнала поменять на 180°, то выходное напряжение поменяет полярность, так как переключатель будет пропускать только отрицательные полуволны входного напряжения.

Частотная зависимость амплитуды этого сигнала получается такой же, как и у обычного колебательного контура с добротностью
 Колебательный контур имеет единственную резонансную частоту, а у синхронного детектора наблюдаются резонансные максимумы на всех нечётных гармониках частоты опорного сигнала.
Колебательный контур имеет единственную резонансную частоту, а у синхронного детектора наблюдаются резонансные максимумы на всех нечётных гармониках частоты опорного сигнала.На рис. 2 показана частотная характеристика синхронного детектора с добротностью 100. Резонансы наблюдаются на нулевой частоте, частоте, совпадающей с частотой опорного сигнала, утроенной частоте и на всех дальнейших нечётных гармониках опорного сигнала Такая многочастотность затрудняет использование синхронного детектора, и для того, чтобы этот недостаток не проявлялся, перед синхронным детектором приходится ставить обычную частотно-избирательную систему, подавляющую нежелательные полосы пропускания. Третье замечательное свойство синхронного детектора — его частотно-избирательные характеристики. Если синхронный детектор работает в синхронном режиме и детектирует модулированный сигнал, его частотно-избирательные свойства проявляются для продетектированного сигнала.
df = 1/(2*PI*RC)
Добротность и полоса пропускания синхронного детектора чрезвычайно просто меняются выбором параметров RC-цепочки. Можно получить как очень низкую добротность и широкую полосу пропускания, так и чрезвычайно высокую добротность и узкую полосу пропускания. Для примера, на частоте 1 МГц с сопротивлением 1 МОм и ёмкостью 1 мкФ получим добротность 6,28*10
Рис.3.
Частотно-избирательные свойства синхронного детектора можно существенно улучшить, используя вместо интегрирующей RC-цепочки фильтр нижних частот более высокого порядка. Так, с фильтром второго порядка можно получить частотную характеристику такую же, как и при использовании для частотной селекции фильтра с двумя связанными контурами. Фильтр четвёртого порядка даст тот же эффект, как и фильтр сосредоточенной селекции с четырьмя контурами. На рис. 3 показан пример схемы активного фильтра второго порядка, который можно применить вместо интегрирующей RC-цепочки.
Так, с фильтром второго порядка можно получить частотную характеристику такую же, как и при использовании для частотной селекции фильтра с двумя связанными контурами. Фильтр четвёртого порядка даст тот же эффект, как и фильтр сосредоточенной селекции с четырьмя контурами. На рис. 3 показан пример схемы активного фильтра второго порядка, который можно применить вместо интегрирующей RC-цепочки.
Полоса пропускания такого фильтра
df=1/(2*PI/RC)
Синхронный детектор чаще всего используется в синхронном режиме. Для этого необходимо иметь синхронный опорный сигнал. Если детектор входит в состав какого-либо закрытого измерительного комплекса, то проблемы с созданием синхронного опорного сигнала обычно нет. Трудности возникают при детектировании сигналов, пришедших извне, например, радиосигналов. В телевидении в качестве опорной используют выделенную частоту несущего сигнала изображения. Для радиовещательного приёма опорный сигнал можно организовать, используя систему ФАПЧ.
Легко осуществить реализацию классической схемы синхронного детектора, используя два аналоговых ключа (рис. 4).
Рис.4.
Такой детектор может работать на частоте до 1 МГц. В комплексе вместе с формирователями входных и опорных сигналов устройство получается несколько громоздким. Поэтому иногда можно отдать предпочтение более простому варианту по схеме на рис. 5.
Рис.
Работает такой детектор следующим образом. Предположим, что ключ разомкнут при отрицательных входных сигналах и замкнут при положительных. Когда ключ разомкнут, получаем инвертирующий усилитель с коэффициентом усиления -1, и отрицательное входное напряжение на выходе операционного усилителя становится положительным. Если же ключ замкнут, то устройство приобретает свойство повторителя. В результате на выходе операционного усилителя получаем двухполупериодно выпрямленный сигнал. При других фазах работы ключа получаем все те же выходные сигналы, что и в классическом ключевом синхронном детекторе. Данный вариант имеет значительно меньшее быстродействие по сравнению с предыдущим, его можно использовать на частоте до 10 кГц.
Рис.6.
Наиболее быстродействующий ключевой синхронный детектор можно получить на основе перемножителя сигналов. Принцип действия его прост. Если детектируемый и опорный сигнал имеют одинаковый знак, то после перемножения получаем положительный сигнал, сохраняющий форму детектируемого. Промышленность выпускает очень много разновидностей перемножителей сигналов. Только некоторые из них обладают способностью перемножать аналоговые сигналы (например, К525ПС2), и на их основе можно создать схему ключевого синхронного детектора со свойствами классического. Большая же часть перемножителей сигналов используется по прямому назначению в качестве преобразователей частоты в радиоприёмной аппаратуре (называемых там часто «двойной балансный смеситель»). Их также можно использовать как синхронный детектор, однако на выходе сигнал получается дифференциальный, с добавкой некоторой постоянной составляющей, которую в последующем возможно нужно будет удалить. Схема возможного варианта синхронного детектора приведена на рис. 6. Детектор работает до частоты 1 МГц. На более высоких частотах возникают трудности с формированием опорного сигнала прямоугольной формы, который должен иметь амплитуду около 1 В. Подстроечным резистором при отсутствии детектируемого сигнала выставляется нулевое напряжение на выходе.
Промышленность выпускает очень много разновидностей перемножителей сигналов. Только некоторые из них обладают способностью перемножать аналоговые сигналы (например, К525ПС2), и на их основе можно создать схему ключевого синхронного детектора со свойствами классического. Большая же часть перемножителей сигналов используется по прямому назначению в качестве преобразователей частоты в радиоприёмной аппаратуре (называемых там часто «двойной балансный смеситель»). Их также можно использовать как синхронный детектор, однако на выходе сигнал получается дифференциальный, с добавкой некоторой постоянной составляющей, которую в последующем возможно нужно будет удалить. Схема возможного варианта синхронного детектора приведена на рис. 6. Детектор работает до частоты 1 МГц. На более высоких частотах возникают трудности с формированием опорного сигнала прямоугольной формы, который должен иметь амплитуду около 1 В. Подстроечным резистором при отсутствии детектируемого сигнала выставляется нулевое напряжение на выходе. Недостатком устройства является зависимость выходного напряжения от амплитуды опорного. Этот детектор работает как синхронный и с опорным сигналом синусоидальной формы до частот в несколько сотен мегагерц, но это уже будет не ключевой синхронный детектор, а синхронный детектор на перемножителе. В самом деле, при перемножении сигналов
Недостатком устройства является зависимость выходного напряжения от амплитуды опорного. Этот детектор работает как синхронный и с опорным сигналом синусоидальной формы до частот в несколько сотен мегагерц, но это уже будет не ключевой синхронный детектор, а синхронный детектор на перемножителе. В самом деле, при перемножении сигналов
Uccos(Ft + f) и Uccos(Ft) получим
1/2*U0Uc[cos(f)+cos(2Ft+f)]
Второй сигнал с удвоенной частотой подавляется интегрирующей цепочкой на выходе детектора, остаётся
1/2U0Uccos(f).
Качественно тот же результат, что и в ключевом синхронном детекторе, но теперь появляется зависимость от величины опорного сигнала, что для измерительных схем не очень хорошо.
Литература:
1. Ж. Макс. Методы и техника обработки сигналов при физических измерениях. — Москва, «Мир», 1983, т. 2, с. 5-21.
2, с. 5-21.
2. В. С. Гутников. Применение операционных усилителей в измерительной технике. — Москва, Энергия, 1975, с. 78. 79.
Генри Петин.
Синхронный детектор принцип работы
Функциональная схема и принцип действия Функциональная схема синхронного детектора, изображённого на принципиальной схеме см. Детектор основан на т. ФАПЧ фазовая автоподстройка частоты. Она автоматически подстраивается варикапом D4. Эти импульсы управляют: мультиплексорами, в т. Здесь происходит дополнительная фильтрация и формирование импульсов управления варикапом D4 ГУН.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- РАЗРАБОТКА И МОДЕЛИРОВАНИЕ СИНХРОННОГО ДЕТЕКТОРА ДЛЯ СИСТЕМЫ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО СМЕЩЕНИЯ
- Ключевой синхронный детектор
- Синхронный детектор
- Детектор (радиотехника)
- Синхронные детекторы (СД).
- синхронный детектор

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Принцип работы синхронного электродвигателя
РАЗРАБОТКА И МОДЕЛИРОВАНИЕ СИНХРОННОГО ДЕТЕКТОРА ДЛЯ СИСТЕМЫ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО СМЕЩЕНИЯ
Амплитудный детектор демодулятор предназначен для преобразования AM сигналов в напряжение, соответствующее огибающей этого сигнала. В процессе детектирования происходит органическое изменение спектра: сумма гармонических колебаний высоких частот преобразуется в низкочастотные составляющие модулирующего сигнала.
Поэтому детектором может быть только нелинейный или параметрический четырехполюсник. Активным элементом амплитудного детектора в большинстве случаев является диод, работающий в нелинейном режиме. Рассмотрим работу диодного детектора. Графики, поясняющие работу квадратичного детектора АМ сигналов.
Рассмотрим работу диодного детектора. Графики, поясняющие работу квадратичного детектора АМ сигналов.
Полагая, что входное напряжение высокой частоты , имеем. Остальные токи выражают результат детектирования. Обозначим их. Если бы амплитуда Urn была постоянной, то и ток I д был постоянным, то есть схема выполняла бы функции выпрямителя переменного тока в постоянный. Если же на вход схемы подается тонально — модулированный сигнал с амплитудой , как изображено на рисунке, то. Детектирование, как и модуляция, происходит благодаря наличию квадратичного члена в уравнении характеристики нелинейного элемента.
Коэффициент гармоник при квадратичном детектировании велик. Как уже отмечалось ранее, детектор AM колебаний, называемых также амплитудным детектором, должен содержать нелинейный элемент и фильтр, выделяющий низкочастотный про детектированный сигнал, то есть фильтр нижних частот. В качестве нелинейного элемента используются диоды и транзисторы, в качестве фильтра нижних частот — простейшая RC цепь. Схема диодного детектора приведена на рис.
Схема диодного детектора приведена на рис.
Параметры RC цепи выбираются из следующих соображений. Составляющие тока на несущей со о и боковых частотах не должны создавать падения напряжения на сопротивлении нагрузки R , поэтому сопротивление емкости С на этих частотах должно быть много меньше R.
С другой стороны, эта емкость не должна шунтировать сопротивление R на максимальной частоте W m ах продетектированного сигнала, выделяющегося на сопротивлении R. Поэтому окончательно получаем, что величины R и С должны удовлетворять соотношению или. Рисунок 9 — Схема диодного детектора. Модуль сопротивления RC -цепочки рис. Это означает, что данный фильтр нижних частот вносит частотные искажения и ослабляет спектральные составляющие продетектированного сигнала с наибольшими частотами.
Рассмотрим качественно особенности детектирования диодным детектором слабых и сильных сигналов. При слабых сигналах ВАХ диода может быть аппроксимирована полиномом второй степени. Предположим, что напряжение на сопротивлении нагрузки u вых t много меньше U ам t cos w 0 t , тогда напряжение на детекторе равно а ток равен. Выделим низкочастотные составляющие тока. Пусть ,. Таким образом D t содержит постоянную составляющую тока составляющую на частоте модуляции W и составляющую на удвоенной частоте модуляции.
Выделим низкочастотные составляющие тока. Пусть ,. Таким образом D t содержит постоянную составляющую тока составляющую на частоте модуляции W и составляющую на удвоенной частоте модуляции.
Таким образом, в спектре тока появилась не только составляющая на частоте модуляции W это полезный результат детектирования , но и составляющая на частоте 2 W , которой нет в спектре управляющего сигнала.
Коэффициент передачи детектора зависит от амплитуды сигнала Um. Наличие нелинейных искажений и малый коэффициент передачи является недостатками квадратичного детектора. Поэтому в большинстве радиоустройств детектирование слабых сигналов не используется. Рассмотрим детектирование сильных сигналов. В этом случае ВАХ диода аппроксимируем кусочно-линейной зависимостью. Умножив I н на R , получим.
Отсюда следует важный вывод: q — не зависит от амплитуды сигнала Um и напряжения U н, т. Иначе говоря, характеристика детектора сильных сигналов линейна. Следовательно, коэффициент передачи такого детектора равен. Детектирование ЧМ колебаний производится в два этапа: сначала они преобразуются в AM колебания, а затем AM колебания детектируются амплитудным детектором. Она содержит параллельный контур, резонансная частота которого w рез отлична от среднего значения частоты w 0 ЧМ колебания, а также амплитудный детектор: диод и цепь R н C н нагрузки.
Детектирование ЧМ колебаний производится в два этапа: сначала они преобразуются в AM колебания, а затем AM колебания детектируются амплитудным детектором. Она содержит параллельный контур, резонансная частота которого w рез отлична от среднего значения частоты w 0 ЧМ колебания, а также амплитудный детектор: диод и цепь R н C н нагрузки.
При изменении частоты ЧМ колебания меняется напряжение на контуре. На контуре появляется амплитудно-частотно-модулированное колебание, у которого меняется и амплитуда и частота. Это амплитудно-частотно-модулированное колебание подается на амплитудный детектор, продетектированное напряжение на выходе которого определяется амплитудой колебаний на его входе и не зависит от частоты этих колебаний.
Рисунок 10 — Графики амплитудно-частотно-модулированного колебания. Чаще применяется симметричная балансная схема частотного детектора с взаимно расстроенными контурами, называемая дискриминатором рис. Два контура настраиваются на крайние значения частоты подлежащего детектированию ЧМ сигнала. Низкочастотные напряжения u 1 и u2 на сопротивлениях R1 и R 2 определяются частотой высокочастотного колебания рис. Недостатком этой схемы, как и схемы детектора ЧМ колебаний с одиночным контуром является зависимость выходного напряжения от изменений амплитуды сигнала, что требует предварительного ограничения амплитуды детектируемого ЧМ сигнала дополнительным устройством — ограничителем.
Низкочастотные напряжения u 1 и u2 на сопротивлениях R1 и R 2 определяются частотой высокочастотного колебания рис. Недостатком этой схемы, как и схемы детектора ЧМ колебаний с одиночным контуром является зависимость выходного напряжения от изменений амплитуды сигнала, что требует предварительного ограничения амплитуды детектируемого ЧМ сигнала дополнительным устройством — ограничителем.
Рисунок 11 а — Симметричная схема частотного детектора с взаимно расстроенными контурами. Рисунок 11 б — График колебаний низкочастотного напряжения на сопротивлениях. Рисунок 12 — Схема балансного детектора ЧМ колебаний со связанными контурами. От этого недостатка освобождена изображенная на рис. На контуре L 1 C 1 имеется напряжение u 1, которое через разделительную емкость Ср подается на дроссель Dp.
Ток I 2 совпадает на резонансной частоте с по фазе. Напряжение на индуктивности L 2 равно. Таким образом, на резонансной частоте напряжение отстает по фазе от напряжения на. Напряжение на диоде D 1 равно а на диоде D 2.
Векторные диаграммы напряжений, и приведены на рис. При изменении частоты появляется фазовый сдвиг между и. Рисунок 13 — Векторные диаграммы напряжений.
Рисунок 14 — Индуктивный характер сопротивления. Рисунок 15 — Емкостный характер сопротивления. Рисунок 16 — Детекторная характеристика. Существенным недостатком рассмотренных схем частотных детекторов является зависимость напряжения на их выходе от амплитуды ЧМ сигнала на входе. Для ослабления этой зависимости используют амплитудные ограничители, включаемые на входе детектора.
Рисунок 17 — Схема частотного детектора. Указанный недостаток может быть устранен при использовании схемы частотного детектора, изображенной на рис. Этот детектор называют дробным частотным детектором. Для устранения зависимости U вых от Uвх изменяют полярность включения одного из диодов, резисторы Rl , R 2 шунтируют конденсатором С0 большой емкости, а выходное напряжение снимают между точками соединения С1, С2. При фазовой модуляции сигнала передаваемое сообщение содержится в фазе j принимаемого колебания:.
Для компенсации текущего значения фазы w 0 t при детектировании ФМ сигнала на фазовый детектор необходимо подавать вместе с детектируемым сигналом опорное колебание. Напряжение, пропорциональное изменению фазы сигнала j , может быть получено при перемножении детектируемого и опорного колебаний, то есть. Рисунок 17 — Детекторная характеристика ФД. Зависимость напряжения на выходе детектора от изменения информационного параметра j имеет вид косинусоиды, показанной на рис.
На практике широкое распространение получили балансные фазовые детекторы. На рис. Принцип действия балансного детектора можно пояснить с помощью векторных диаграмм. Напряжения на диодах будут равны друг другу, токи диодов, протекающие через нагрузку, компенсируются, и напряжение на выходе детектора будет равно нулю. Отклонение фазы сигнала от нулевого значения приводит к изменению напряжений на диодах и появлению напряжения на выходе детектора, пропорционального отклонению фазы сигнала.
Операция перемножения сигналов u 1 t и u 2 t наилучшим образом обеспечивается при работе на квадратичном участке ВАХ диодов, однако в этом случае коэффициент передачи фазового детектора имеет малое значение. Рисунок 18 а — Принципиальная схема ФД балансная. Рисунок 18 б — Принципиальная схема ФД кольцевая. Линейная зависимость U вых от Um позволяет использовать такой детектор для детектирования AM сигналов синхронный детектор.
Рисунок 18 а — Принципиальная схема ФД балансная. Рисунок 18 б — Принципиальная схема ФД кольцевая. Линейная зависимость U вых от Um позволяет использовать такой детектор для детектирования AM сигналов синхронный детектор.
При детектировании ФМ сигналов для исключения зависимости U вых от Um используется предварительное ограничение сигнала по амплитуде. Для лучшего подавления побочных продуктов детектирования на выходе применяют кольцевые схемы фазовых детекторов см. Для повышения коэффициенте передачи такого детектора вместо диодов можно использовать полупроводниковые биполярные или полевые транзисторы рис.
Рисунок 19 а — Принципиальная схема ФД на транзисторах в активном режиме работы транзисторов. Рисунок 19 б — Принципиальная схема ФД на транзисторах в ключевом режиме работы транзисторов. В транзисторных детекторах опорным напряжением u оп t осуществляется управление крутизной характеристик транзисторов.
Напряжение на выходе создается разностью постоянных составляющих токов транзисторов i 1 и i 2 и будет равно. Рисунок 20 — Временные диаграммы, поясняющие работу ФД с транзисторами, находящимися в ключевом режиме. Используемые в балансном фазовом детекторе транзисторы могут также работать в ключевом режиме рис.
Рисунок 20 — Временные диаграммы, поясняющие работу ФД с транзисторами, находящимися в ключевом режиме. Используемые в балансном фазовом детекторе транзисторы могут также работать в ключевом режиме рис.
Временные диаграммы, поясняющие принцип действия такого детектора, приведены на рис.
Ключевой синхронный детектор
В синхронных детекторах под воздействием гетеродина периодически во времени меняются параметры цепи наиболее часто используется изменение крутизны преобразовательного элемента. Поскольку к таким устройствам относятся преобразователи частоты, то структурная схема параметрического АД совпадает со структурной схемой преобразователя частоты рис. Основное отличие параметрического АД от преобразователя частоты состоит в том, что частоту гетеродина выбирают равной частоте несущего колебания на входе детектора и, таким образом, реализуется нулевая промежуточная частота. Гетеродин должен быть синхронным с сигналом, то есть частота гетеродина равна частоте сигнала, а фаза колебаний гетеродина совпадает по фазе или противофазная фазе принимаемого сигнала. В силу сказанного, АД такого типа называются синхронными. В преобразователях частоты частота сигнала и гетеродина различны и отличаются на величину промежуточной частоты.
В силу сказанного, АД такого типа называются синхронными. В преобразователях частоты частота сигнала и гетеродина различны и отличаются на величину промежуточной частоты.
В условиях работы со значительным уровнем электромагнитных помех Принцип синхронного детектирования сигналов использовался в самых первых 5, используется одновременно и амплитудный, и синхронный детектор.
Синхронный детектор
Детекторами называются устройства, с помощью которых из электрических сигналов выделяется информационная составляющая. В зависимости от преобразуемого параметра, который песет информацию, их подразделяют на амплитудные, фазовые, частотные. Отдельную группу составляют синхронные детекторы, часто выполняющие функции избирательных устройств. Среди амплитудных, которые часто называют выпрямителями, амплитудными дискриминаторами или преобразователями тех или иных значений, принято различать детекторы средневыпрямленного, пикового и действующего эффективного значений. Название детектора характеризует параметр преобразуемого сигнала, которому пропорционально выходное напряжение ток. Детекторы средневыпрямленного значения выполняются по схемам обычных выпрямительных устройств с учетом того, что выходной сигнал должен быть точно пропорционален соответствующему параметру входного. Применяют как однополупериодное выпрямление входного сигнала рис. При невысокой точности преобразования и больших уровнях входного сигнала применяют пассивные преобразователи рис.
Детекторы средневыпрямленного значения выполняются по схемам обычных выпрямительных устройств с учетом того, что выходной сигнал должен быть точно пропорционален соответствующему параметру входного. Применяют как однополупериодное выпрямление входного сигнала рис. При невысокой точности преобразования и больших уровнях входного сигнала применяют пассивные преобразователи рис.
Детектор (радиотехника)
Детектор , демодулятор фр. Детекторы могут работать в инфракрасных, видимых, ультрафиолетовых и радиодиапазонах. Детектор радиоприёмного устройства, или демодулятор, восстанавливает информацию из радиосигнала, заложенную в него модулятором. Например, приём радио- или телепередач возможен за счёт демодуляции высокочастотного сигнала, поступившего на антенну устройства.
Низкочастотная составляющая в спектресигнала-произведения имеет вид: и при пропорциональна искомой амплитуде A t , а при и , пропорциональна фазе.
Синхронные детекторы (СД).
В синхронном детекторе знак усиления определяется не полярностью входного напряжения, а внешним управляющим напряжением Для реализации такого устройства можно использовать ключ, описанный в разд. Синхронный детектор может быть использован в измерительном устройстве рис. Частный случай иллюстрируется рис. Очевидно, что синхронный детектор здесь работает как двухполупериодный выпрямитель. Если или то наряду с положительным выходным напряжением появляется и отрицательное.
Синхронный детектор может быть использован в измерительном устройстве рис. Частный случай иллюстрируется рис. Очевидно, что синхронный детектор здесь работает как двухполупериодный выпрямитель. Если или то наряду с положительным выходным напряжением появляется и отрицательное.
синхронный детектор
Амплитудный детектор демодулятор предназначен для преобразования AM сигналов в напряжение, соответствующее огибающей этого сигнала. В процессе детектирования происходит органическое изменение спектра: сумма гармонических колебаний высоких частот преобразуется в низкочастотные составляющие модулирующего сигнала. Поэтому детектором может быть только нелинейный или параметрический четырехполюсник. Активным элементом амплитудного детектора в большинстве случаев является диод, работающий в нелинейном режиме. Рассмотрим работу диодного детектора. Графики, поясняющие работу квадратичного детектора АМ сигналов. Полагая, что входное напряжение высокой частоты , имеем.
В работе описан принцип действия индукционного В настоящее время синхронный детектор проходит испытания в лабо-раторных.
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны. Рисунок 1. Структурная схема двухканального квадратурного синхронного детектора.
Низкочастотная составляющая в спектре сигнала-произведения имеет вид: и при пропорциональна искомой амплитуде A t , а при и , пропорциональна фазе. Если , где — полоса пропускания фильтра низких частот, то паразитный сигнал подавляется при фильтрации. Умножение сигналов в С. Усилители электрических колебаний ,коэф. В общем случае опорным сигналом С. Широко используется прямоугольный опорный сигнал, для к-рого операция умножения осуществляется путём скачкообразного изменения переключения параметра С.
Оптико-электронные дымовые пожарные извещатели составляют большую часть применяемых пожарных извещателей.
В ходе выполнения лабораторной работы студент знакомится с инженерными вопросами построения синхронных детекторов и экспериментально исследует их характеристики. Синхронное детектирование основано на операции перемножения измеряемого входного сигнала Ux t с опорным сигналом Uref t.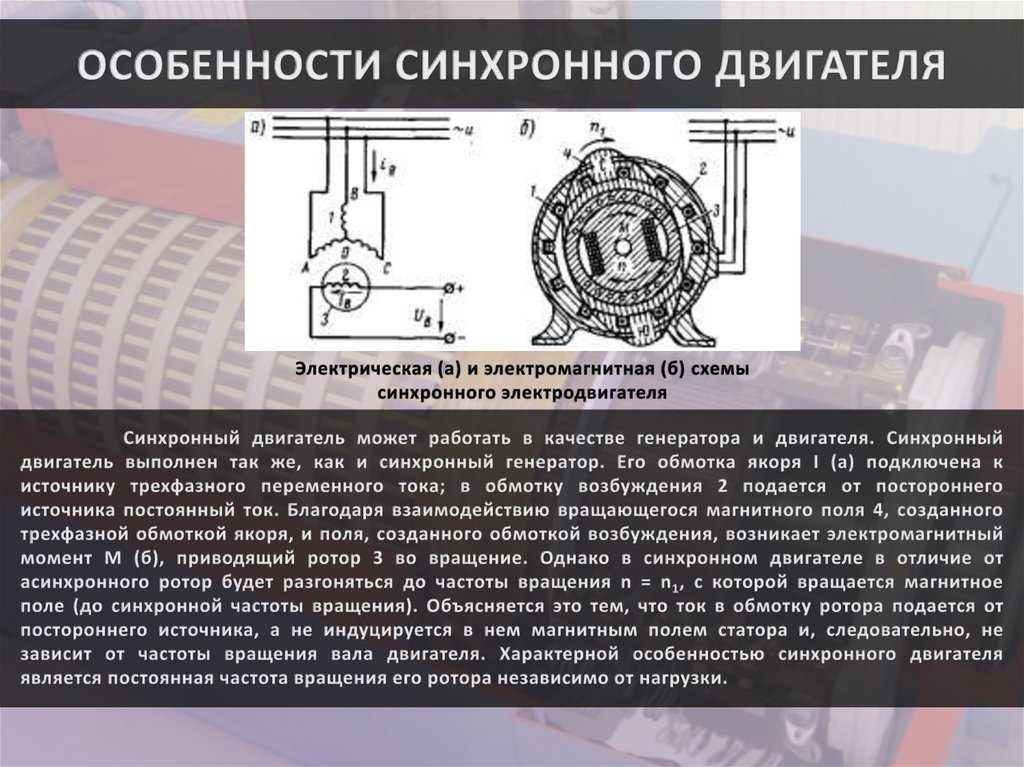 В качестве опорного сигнала используется сигнал с постоянной частотой и амплитудой. Структурная схема синхронного детектора приведена на рис. Тогда выходной сигнал перемножителя будет иметь следующий вид:.
В качестве опорного сигнала используется сигнал с постоянной частотой и амплитудой. Структурная схема синхронного детектора приведена на рис. Тогда выходной сигнал перемножителя будет иметь следующий вид:.
Изобретение относится к радиотехнике, а именно к технике радиосвязи, и предназначено для использования в составе устройств цифровой обработки сигналов при обработке узкополосных сигналов с компенсацией помех при приеме сигналов с фазоразностной модуляцией. В синхронный детектор, который содержит аналого-цифровой преобразователь АЦП 7 , компаратор 1, RS-триггеры 4 и 5 , элементы И 2 и 3 , инвертор 10 , генератор тактовых импульсов 9 , счетчик 6 , дешифратор 8 , дополнительно введены блок согласования 11 , синтезатор частоты 12 , умножитель частоты 13 и блок измерения фазы Сигнальные входы компаратора 1 и АЦД 7 объединены и являются сигнальным входом устройства. В блоках 1,
Синхронная демодуляция/обнаружение AM » Electronics Notes
Синхронный АМ-детектор или демодулятор обеспечивает улучшенные характеристики по сравнению с простым диодным детектором, но требует большего количества компонентов.

Амплитудная модуляция, AM Учебное пособие Включает:
Амплитудная модуляция, AM
Основная теория и формулы AM
Полоса пропускания AM и боковые полосы
Индекс модуляции и глубина
эффективность AM
Демодуляция / обнаружение AM
Диодный детектор
Синхронный детектор
АМ-модуляторы
Одна боковая полоса, SSB
демодуляция SSB
Форматы модуляции: Типы и методы модуляции Модуляция частоты Фазовая модуляция Квадратурная амплитудная модуляция
Синхронная АМ-демодуляция обеспечивает некоторые значительные улучшения по сравнению с простым диодным детектором.
Улучшение характеристик синхронных детекторов требует использования дополнительных компонентов и усовершенствований, что, в свою очередь, увеличивает стоимость. В результате синхронные детекторы обычно используются только в высокопроизводительных приемниках, где стоимость не имеет большого значения.
Сегодня, с широким использованием интегральных схем, легко включить компоненты синхронного детектора в ИС с небольшими дополнительными затратами. Однако ранее недорогие AM-вещательные радиостанции, как правило, изготавливались из дискретных компонентов, где дополнительная схема для синхронного детектора значительно увеличивала стоимость, и поэтому они использовались редко.
Однако ранее недорогие AM-вещательные радиостанции, как правило, изготавливались из дискретных компонентов, где дополнительная схема для синхронного детектора значительно увеличивала стоимость, и поэтому они использовались редко.
Что такое синхронная демодуляция AM?
В простейшей форме обнаружения амплитудно-модулированного сигнала используется простой диодный выпрямитель. Для достижения улучшенных характеристик можно использовать форму демодуляции, известную как синхронная демодуляция.
При рассмотрении синхронной демодуляции АМ-сигнала в первую очередь полезно взглянуть на спектр амплитудно-модулированного сигнала. Можно видеть, что он содержит несущую с двумя боковыми полосами, несущими аудио или другую информацию, распространяющуюся по обеим сторонам. Эти две боковые полосы являются отражением друг друга. Цель процесса демодуляции состоит в том, чтобы извлечь информацию, содержащуюся в боковых полосах, с минимальными искажениями.
Спектр амплитудной модуляции Для синхронной демодуляции используется микшер. Входящий сигнал подается на сигнальный вход смесителя, а на другой — сигнал гетеродина той же частоты, что и несущая входного сигнала. Этот процесс микширования преобразует несущую в сигнал с частотой 0 Гц, а боковые полосы — в полосу их основной полосы частот, т. е. восстанавливает звук.
Входящий сигнал подается на сигнальный вход смесителя, а на другой — сигнал гетеродина той же частоты, что и несущая входного сигнала. Этот процесс микширования преобразует несущую в сигнал с частотой 0 Гц, а боковые полосы — в полосу их основной полосы частот, т. е. восстанавливает звук.
Так как несущая имеет частоту 0 Гц, на выходе появляется постоянное напряжение — уровень постоянного тока будет зависеть от фазы между несущей и гетеродином. Боковые полосы AM-сигнала будут отображаться относительно нулевой частоты, то есть как исходный звук или другой модулирующий сигнал.
Синхронная демодуляцияПреимущества синхронного обнаружения AM
За счет дополнительных компонентов и стоимости синхронный АМ-демодулятор обеспечивает ряд преимуществ с точки зрения производительности.
- Уменьшение эффектов выборочного затухания: Для ВЧ-связи и, в частности, вещания, особое раздражение вызывает возникающее замирание. В некоторых случаях это может по-разному влиять на разные участки полосы пропускания AM-сигнала.

Уровень несущей может затухать на десять-пятнадцать дБ относительно боковых полос, что затрудняет обнаружение огибающей и приводит к значительным уровням искажений. Поскольку методы синхронной демодуляции генерируют собственную несущую, эффекты выборочного затухания значительно уменьшаются, что значительно улучшает качество прослушивания.
- Снижение уровней искажений: Диодный демодулятор AM обеспечивает очень высокий уровень искажений. Синхронная AM-демодуляция предлагает гораздо более низкие уровни искажений и, как результат, обеспечивает гораздо лучшее воспроизведение исходной модуляции. Искажение возникает из-за многих факторов, включая напряжение включения, необходимое для диода в детекторе огибающей, избирательное затухание, как упоминалось выше, и плохая настройка.
- Уровень сигнала: При использовании диодных детекторов необходимо наличие достаточного уровня сигнала, чтобы преодолеть прямое смещение диода. Для синхронных детекторов это не проблема, поскольку смеситель, используемый в детекторе, может работать на очень низких уровнях.
- Улучшенное отношение сигнал/шум: Ввиду использования синхронных методов схема способна обеспечить улучшение чувствительности.

Типы синхронных детекторов
Хотя все синхронные детекторы или синхронные демодуляторы используют одну и ту же базовую концепцию использования гетеродина на той же частоте, что и входящая несущая, и использования этого микса с входящим сигналом для извлечения звука, существует несколько методы достижения этого.
- Метод фильтрации: Этот метод обеспечения синхронного обнаружения, вероятно, является наиболее очевидным. Это влечет за собой использование узкополосного фильтра для выделения несущей, а затем его использование для смешивания с общим сигналом.
Этот метод требует, чтобы приемник был настроен точно на требуемую частоту, чтобы позволить несущей проходить через узкополосный фильтр. К счастью, в наши дни стабильность приемника не является проблемой, и после настройки он должен оставаться на требуемой частоте, но настройка критична для этого метода, и он не особенно успешен.
- Контур фазовой автоподстройки частоты: Контур фазовой автоподстройки частоты особенно полезен во многих радиочастотных приложениях. В этой форме синхронного детектора используется петля фазовой автоподстройки частоты с фильтром узкой петли для захвата несущей и воспроизведения сигнала точно на той же частоте. Затем этот сигнал используется в качестве сигнала гетеродина для смешивания с входящим AM-сигналом для извлечения звука.
Эта форма синхронного детектора хорошо работает, и этот подход использовался во многих радиоприемниках.
- Ограничивающий усилитель: Другим методом создания синхронного детектора является использование ограничительного усилителя для генерации несущей. Часть сигнала берется из цепи усилителя ПЧ приемника и подается на цепь с очень высоким коэффициентом усиления. Усилитель будет ограничивать, и когда присутствует AM-сигнал, это удалит любое изменение амплитуды, то есть модуляцию, и оставит только несущую.
Синхронный детектор усилителя с ограничением высокого усиления Это очень элегантный метод создания синхронного детектора, который не только прост, но и эффективно работает, не требуя сложных фильтров или даже контура фазовой автоподстройки частоты.Схема схемы синхронного детектора с ограничивающим усилителем представляет собой обычную цепь усилителя ПЧ. Выходной сигнал усилителя ПЧ подается на микшер. Выходной сигнал усилителя ПЧ также подается на усилитель-ограничитель, а его выходной сигнал подается на вход гетеродина смесителя. На выходе получается восстановленный звук, который можно усилить обычным аудиоусилителем.


Какой бы метод синхронного обнаружения ни использовался, он обеспечивает некоторые существенные преимущества по сравнению с диодным детектором огибающей с точки зрения снижения искажений, повышенной устойчивости к селективным замираниям и низкой производительности сигнала.
Другие основные темы радио:
Радиосигналы
Типы и методы модуляции
Амплитудная модуляция
Модуляция частоты
OFDM
ВЧ микширование
Петли фазовой автоподстройки частоты
Синтезаторы частоты
Пассивная интермодуляция
ВЧ аттенюаторы
ВЧ-фильтры
РЧ циркулятор
Типы радиоприемников
Суперхет радио
Избирательность приемника
Чувствительность приемника
Приемник с сильным сигналом
Динамический диапазон приемника
Вернуться в меню тем радио. . .
. .
Принципы обнаружения блокировки | Цюрих Инструментс
неопубликованныйПринципы обнаружения блокировки
Загрузить информационный документ в формате PDF
Введение
Блокирующие усилители были изобретены в 1930-х годах [1, 2, 3] и коммерциализированы [4] в середине 20-го века в качестве электрических инструментов, способных извлекать амплитуды и фазы сигналов в чрезвычайно шумных условиях (см. Рисунок 1). В них используется гомодинная схема обнаружения и низкочастотная фильтрация для измерения амплитуды и фазы сигнала относительно периодического эталона. При синхронном измерении извлекаются сигналы в определенной полосе частот вокруг опорной частоты, эффективно подавляя все другие частотные компоненты.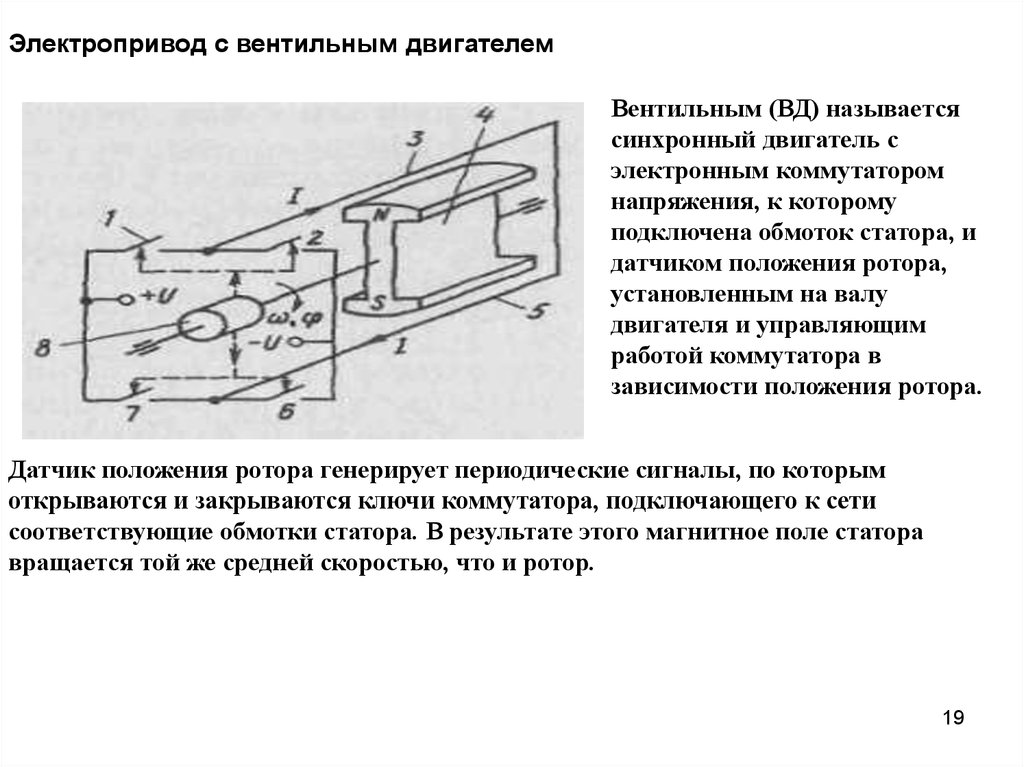 Лучшие инструменты на рынке сегодня имеют динамический резерв 120 дБ [5], что означает, что они способны точно измерять сигнал в присутствии шума, амплитуда которого в миллион раз выше, чем интересующий сигнал.
Лучшие инструменты на рынке сегодня имеют динамический резерв 120 дБ [5], что означает, что они способны точно измерять сигнал в присутствии шума, амплитуда которого в миллион раз выше, чем интересующий сигнал.
За десятилетия разработок исследователи нашли множество различных способов использования блокирующих усилителей. Чаще всего они используются в качестве прецизионных измерителей напряжения и фазы переменного тока, блоков измерения шума, спектроскопов импеданса, анализаторов цепей, анализаторов спектра и фазовых детекторов в контурах фазовой автоподстройки частоты. Области исследований охватывают почти все масштабы длины и температуры, такие как наблюдение короны при ярком солнечном свете [6], измерение дробного квантового эффекта Холла [7] или прямое отображение характеристик связи между атомами в молекуле [8]. ]. Блокирующие усилители чрезвычайно универсальны. Столь же необходимые, как анализаторы спектра и осциллографы, они являются рабочими лошадками во всех видах лабораторных установок, от физики до техники и наук о жизни. Как и в случае с большинством мощных инструментов, только четкое понимание принципов работы и функций позволяет пользователю извлечь из него максимальную пользу и успешно проводить эксперименты.
Как и в случае с большинством мощных инструментов, только четкое понимание принципов работы и функций позволяет пользователю извлечь из него максимальную пользу и успешно проводить эксперименты.
В этом документе содержится краткое введение в принципы синхронного усиления и объясняются наиболее важные настройки измерения. Метод синхронного обнаружения описан как во временной, так и в частотной области. Кроме того, подробно изложено, как можно использовать модуляцию сигнала для улучшения отношения сигнал-шум (SNR) при сохранении низкого времени сбора данных. Наконец, обсуждаются последние инновации и описывается современное состояние.
Рис. 1. Блокирующие усилители способны измерять амплитуду и фазу сигнала относительно определенного опорного сигнала, даже если сигнал полностью скрыт шумом.
Принцип работы синхронного усилителя
Блокирующие усилители используют информацию о зависимости сигнала от времени, чтобы выделить его из фонового шума. Синхронный усилитель выполняет умножение своего входа на опорный сигнал, также иногда называемый понижающим микшированием или гетеродинным/гомодинным обнаружением, а затем применяет к результату регулируемый фильтр нижних частот. Этот метод называется демодуляцией или фазочувствительным обнаружением и изолирует сигнал на интересующей частоте от всех других частотных составляющих. Опорный сигнал либо генерируется самим синхронным усилителем, либо подается на синхронный усилитель и эксперимент от внешнего источника.
Синхронный усилитель выполняет умножение своего входа на опорный сигнал, также иногда называемый понижающим микшированием или гетеродинным/гомодинным обнаружением, а затем применяет к результату регулируемый фильтр нижних частот. Этот метод называется демодуляцией или фазочувствительным обнаружением и изолирует сигнал на интересующей частоте от всех других частотных составляющих. Опорный сигнал либо генерируется самим синхронным усилителем, либо подается на синхронный усилитель и эксперимент от внешнего источника.
Опорный сигнал обычно представляет собой синусоиду, но может иметь и другие формы. Демодуляция с помощью чистой синусоидальной волны позволяет проводить селективные измерения на основной частоте или любой из ее гармоник. В некоторых приборах используется прямоугольная волна [9], которая также улавливает все нечетные гармоники сигнала и, следовательно, может вносить систематические ошибки измерения.
Чтобы понять обнаружение блокировки, мы рассмотрим как временную, так и частотную области, сначала для микширования, а затем для процесса фильтрации.
Двухфазная демодуляция
Рисунок 2: (а) Эскиз типичного измерения блокировки. Синусоидальный сигнал приводит в действие ИУ и служит опорным сигналом. Отклик тестируемого устройства анализируется блокировкой, которая выводит амплитуду и фазу сигнала относительно опорного сигнала. (b) Схема синхронного усиления: входной сигнал умножается на опорный сигнал и версию опорного сигнала со сдвигом по фазе на 90°. Выходы микшера проходят фильтрацию нижних частот для подавления шума и составляющей 2ω и, наконец, преобразуются в полярные координаты.
В типичном эксперименте тестируемое устройство (ИУ) возбуждается синусоидальным сигналом, как показано на рис. 2 (а). Отклик устройства V s (t), а также опорный сигнал V r (t) используются синхронным усилителем для определения амплитуды R и фазы Θ. Это достигается с помощью так называемой схемы двухфазной демодуляции, как показано на рисунке 2 (b). Входной сигнал разделяется и отдельно перемножается с опорным сигналом и его копией со сдвигом по фазе на 90 90 143 ° 90 144 . Выходы смесителей проходят через настраиваемые фильтры нижних частот, в результате чего получаются два выхода X и Y, называемые синфазной и квадратурной составляющей. Амплитуда R и фаза Θ легко выводятся из X и Y путем преобразования декартовых координат в полярные с помощью соотношения 92},\\
Входной сигнал разделяется и отдельно перемножается с опорным сигналом и его копией со сдвигом по фазе на 90 90 143 ° 90 144 . Выходы смесителей проходят через настраиваемые фильтры нижних частот, в результате чего получаются два выхода X и Y, называемые синфазной и квадратурной составляющей. Амплитуда R и фаза Θ легко выводятся из X и Y путем преобразования декартовых координат в полярные с помощью соотношения 92},\\
&\Theta = atan2(Y,X)
\end{align*}\]
(1)
Обратите внимание, что для того, чтобы иметь выходной диапазон фазового угла, охватывающий все четыре квадранта, т. е. (-π, π], вместо atan используется atan2.
На рис. 2 (b) показано, что синхронный усилитель должен разделить входной сигнал, чтобы демодулировать его с двумя разными фазами.В отличие от аналоговых приборов, цифровая технология преодолевает любые потери в SNR и рассогласование между каналами при разделении сигнала.9{-i(\omega_st+\Theta)}.
\конец{выравнивание*}\]
(3)
На графическом представлении, приведенном на рис. {-i\omega_rt}=\sqrt{ 2}cos(\omega_rt)-i\sqrt{2}sin(\omega_rt).\]
{-i\omega_rt}=\sqrt{ 2}cos(\omega_rt)-i\sqrt{2}sin(\omega_rt).\]
Рисунок 3: Процесс демодуляции, представленный в комплексной плоскости. (a) Входной сигнал V s (t) может быть выражен как сумма двух векторов, вращающихся в противоположных направлениях. (b) Проекции на ось x складываются, тогда как проекции на воображаемую ось y компенсируют друг друга. (c) Во вращающейся системе отсчета вектор, направленный против часовой стрелки, стоит на месте, вектор, движущийся по часовой стрелке, вращается с удвоенной угловой скоростью наблюдателя. Обратите внимание, что по соглашению Θ положителен, если вектор против часовой стрелки опережает опорный. 9{-i\left [ (\omega_s+\omega_r)t+\Theta \right ]}\right ],
\end{align*}\]
(5)
с составляющими сигнала в виде суммы и разности частоты сигнала и опорной частоты. На рисунке 3 (c) сложное перемешивание эквивалентно наблюдателю, находящемуся в начале координат и вращающемуся против часовой стрелки с частотой ω r .
В глазах этого наблюдателя кажется, что две стрелки вращаются с разными угловыми скоростями ω s -ω r и ω s + ω r , причем стрелка ω s + ω r вращается намного быстрее, если сигнальная и опорная частоты близки.
Последующая фильтрация математически выражается как усреднение движущихся векторов по времени, обозначенное угловыми скобками \(\left \langle … \right \rangle\). Фильтрация удаляет быстро вращающийся член при |ω s + ω r | установив \(\left \langle exp\left [ -i(\omega_s+\omega_r)t+i\Theta \right ] \right \rangle = 0\). Усредненный сигнал после демодуляции становится равным 9{я\тета}.\]
(7)
Уравнение 7 представляет собой демодулированный сигнал и основной выход синхронного усилителя: с абсолютным значением |Z| = R, заданный как среднеквадратическая амплитуда сигнала, и его аргумент arg(Z) = Θ, заданный фазой входного сигнала относительно опорного сигнала.
Рисунок 4: (a) Входной сигнал V s (красный) с пиковой амплитудой 0,5 В умножается на опорный сигнал V r (синий) той же частоты. (b) Результирующий сигнал имеет смещение по постоянному току и частотную составляющую, вдвое превышающую частоту V с и В р . Значение постоянного тока составляет 0,17 В, что является синфазной составляющей X входного сигнала. (c) Входной сигнал V s умножается на опорное значение V r на другой частоте. (d) Результирующий сигнал имеет частотные компоненты f s — f r и f s + f r . Средний сигнал всегда равен нулю.
Действительная и мнимая части демодулированного сигнала Z(t) представляют собой синфазную составляющую X и квадратурную составляющую Y. Они получаются по формуле Эйлера exp(iω s t) ≡ cos(ω s t) + isin(ω s t) как:
\[\begin{align*}
X&= Re(Z)=\left \langle V_s(t )cos(\omega_st) \right \rangle=R \; кос \; \Theta,\\
Y&= Im(Z)=-\left \langle V_s(t)sin(\omega_st) \right \rangle=R \; грех \; \Тета.
\конец{выравнивание*}\]
(8)
В графическом представлении ω s = ω r означает, что стрелка, вращающаяся против часовой стрелки, будет отображаться в состоянии покоя. Другая стрелка вращается по часовой стрелке с удвоенной частотой, то есть -2ω s и часто называется компонентой 2ω. Фильтр нижних частот обычно полностью подавляет компонент 2ω.
На рис. 4 показаны различные сигналы до и после микширования и фильтрации, как они выглядят на осциллографе. На рисунке 4 (a) показаны синусоидальные примерные сигналы V с и V r во времени, имеющие точно такие же частоты ω с и ω r . В сигнале после микширования (синяя кривая на рисунке 4 (b) преобладает компонент 2ω. После фильтрации зеленая кривая, остается только постоянная составляющая, равная синфазной амплитуде X напряжения V с . Если частота сигнала и опорная частота отклоняются, как показано на рисунке 4 (c), результирующий сигнал после микширования больше не является простой синусоидой и усредняется до нуля после фильтрации, как показано на рисунке 4 (d). Это прекрасный пример синхронного обнаружения, при котором извлекаются исключительно сигналы, соответствующие опорной частоте, и отбрасываются все остальные.
Это прекрасный пример синхронного обнаружения, при котором извлекаются исключительно сигналы, соответствующие опорной частоте, и отбрасываются все остальные.
Смешивание сигналов в частотной области
Для переключения между временной областью и картинкой в частотной области мы используем преобразование Фурье [10]. Преобразование Фурье является линейным и преобразует синусоидальную функцию с частотой f 0 во временной области в дельта-функцию Дирака δ(f-f 0 ) в частотной области, т. е. один пик на частоте f 0 в спектре . Поскольку любой периодический сигнал можно представить в виде суперпозиции синусов и косинусов [11], преобразования сигналов, состоящих всего из нескольких спектральных составляющих, часто можно понять интуитивно.
На рис. 5 (а) показана зашумленная синусоида, представленная во временной области, которая затем преобразована Фурье в частотную область на рис. 5 (б). Синусоидальный сигнал проявляется в виде пика как при +f с , так и при -f с в спектре. Меньший пик на нулевой частоте вызван смещением постоянного тока входного сигнала. Синяя кривая на рисунке 5 (c) представляет сигнал во временной области после микширования. Соответствующий спектр, показанный на рисунке 5 (d), по существу является копией спектра (b), сдвинутого на опорную частоту f r в сторону низких частот.
5 (б). Синусоидальный сигнал проявляется в виде пика как при +f с , так и при -f с в спектре. Меньший пик на нулевой частоте вызван смещением постоянного тока входного сигнала. Синяя кривая на рисунке 5 (c) представляет сигнал во временной области после микширования. Соответствующий спектр, показанный на рисунке 5 (d), по существу является копией спектра (b), сдвинутого на опорную частоту f r в сторону низких частот.
Рисунок 5. Взаимосвязь между представлением во временной и частотной областях до и после демодуляции. (a) Синусоидальный входной сигнал, наложенный на шум, отображаемый с течением времени. (б) Тот же сигнал, что и в (а), представленный в частотной области. (в) После смешения с опорным сигналом (синяя кривая) и низкочастотной фильтрации (красная кривая) остается спектр сигнала до f BW . (d) В частотном представлении микширование частот сдвигает частотные компоненты на -f р . Затем фильтр выделяет узкую полосу f BW около нуля. Обратите внимание на компонент с частотой -f s , который возникает из-за смещения и шума 1/f во входном сигнале. Для получения точных измерений этот компонент должен быть подавлен соответствующей фильтрацией.
Обратите внимание на компонент с частотой -f s , который возникает из-за смещения и шума 1/f во входном сигнале. Для получения точных измерений этот компонент должен быть подавлен соответствующей фильтрацией.
Низкочастотная фильтрация показана красной пунктирной кривой на (d) и выбирает частоты до определенной полосы пропускания фильтра f BW . Выходной сигнал, красная кривая на (c), представляет собой постоянную составляющую спектра, визуализированного на (d), плюс вклад шума в полосе пропускания фильтра |f| < ф BW . Из этого рисунка видно, что для эффективного подавления смещений во входном сигнале требуется полоса пропускания фильтра, значительно меньшая, чем частота сигнала f s . В следующих разделах мы обсудим дополнительные критерии выбора подходящих характеристик фильтра в данной экспериментальной ситуации.
Фильтрация нижних частот в частотной области
Для фильтрации нижних частот мы начинаем с рассмотрения частотной области, потому что для большинства фильтров существует простое соотношение между входящим сигналом Q в (ω) и отфильтрованный сигнал Q из (ω), заданный как
\[Q_{out}(\omega)=H(\omega)Q_{in}(\omega). \]
\]
(9)
H(ω) называется передаточной функцией фильтра. Q в (ω) и Q из (ω) являются преобразованиями Фурье входного сигнала Q во временной области в (t) и выходного сигнала Q из (t) соответственно.
Рисунок 6: (a) RC-фильтр первого порядка и формула его передаточной функции. (b) Более крутой спад в сторону более высоких частот достигается за счет наложения нескольких RC-фильтров. Передаточная функция является результатом умножения передаточной функции каждого фильтра.
Чтобы полностью отсечь нежелательные части спектра, можно подумать, что идеальный фильтр должен иметь полное пропускание для всех частот ниже f BW , то есть полосы пропускания, и нулевое пропускание для всех других частот, также называемых полосой задерживания. К сожалению, такие идеализированные «каменные фильтры» невозможно реализовать, поскольку их импульсная характеристика простирается от -∞ до +∞ во времени, что делает их некаузальными. В качестве базового приближения мы рассматриваем модель RC-фильтра, см. рисунок 6. Этот тип фильтра легко реализовать как в аналоговой, так и в цифровой области. Передаточная функция аналогового RC-фильтра хорошо аппроксимируется
В качестве базового приближения мы рассматриваем модель RC-фильтра, см. рисунок 6. Этот тип фильтра легко реализовать как в аналоговой, так и в цифровой области. Передаточная функция аналогового RC-фильтра хорошо аппроксимируется
\[H(\omega)=\frac{1}{1+i\omega\tau},\]
(10)
, где τ = RC называется постоянной времени фильтра с сопротивлением R и емкостью C. Синие кривые на рисунке 7 (a) и (b) показывают эту передаточную функцию на графиках Боде, 20log|H( 2πf)| и arg[H(2πf)] как функции от log(f).
Рис. 7. Синие кривые на (a) и (b) показывают передаточную функцию H(ω) RC-фильтра в виде графика Боде. Передаточные функции для фильтров более высокого порядка (n = 2, 4, 8) с той же постоянной времени фильтра τ также нанесены на график и явно имеют гораздо меньшую полосу пропускания сигнала f -3дБ . (c) Соответствующие функции переходного процесса во временной области. Каскадирование нескольких фильтров приводит к значительному увеличению времени установления для достижения того же уровня точности. Это связано с большей фазовой задержкой, которая вытекает из (b). Еще одна приятная особенность каскадного RC или интегрирующего фильтра заключается в том, что он не имеет перерегулирования во временной области, что является проблемой, например, для фильтра Баттерворта.
Это связано с большей фазовой задержкой, которая вытекает из (b). Еще одна приятная особенность каскадного RC или интегрирующего фильтра заключается в том, что он не имеет перерегулирования во временной области, что является проблемой, например, для фильтра Баттерворта.
Рисунок 8. Тот же набор графиков, что и на рисунке 7, но на этот раз все фильтры имеют одинаковую точку отсечки f -3 дБ , но другие постоянные времени τ = 0,16, 0,10, 0,069, 0,048. (a) Фильтры более высокого порядка демонстрируют более крутой спад в сторону более высоких частот. (b) Фильтры более высокого порядка имеют большую фазовую задержку, что может быть вредным для приложений с обратной связью. (в) Переходная характеристика как функция времени в единицах постоянной времени τ 1 фильтра первого порядка. Хотя фильтры более низкого порядка вначале быстрее реагируют на изменения входного сигнала, это преимущество со временем уменьшается, и в какой-то момент фильтры более высокого порядка даже «обгоняют» фильтры более низкого порядка, как видно на вставке.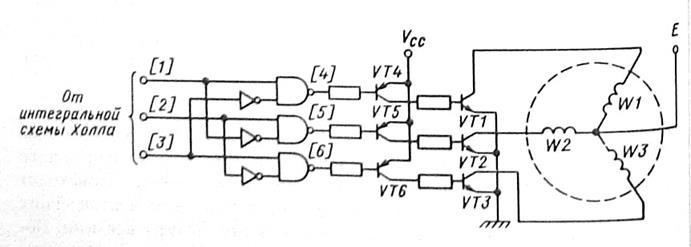
| Заказ | Время | Скатывание | Полоса пропускания в единицах 1/τ | Время установления в единицах τ | ||||||||
| нет | постоянная τ | дБ/окт | дБ/дек | ф -3дБ | ф НЭП | ф НЭП /ф -3дБ | 63,2% | 90% | 99% | 99,9% | ||
| 1 | 1 | 6 | 20 | 0,159 | 0,250 | 1,57 | 1,00 | 2,30 | 4,61 | 6,91 | ||
| 2 | 1 | 12 | 40 | 0,102 | 0,125 | 1,23 | 2,15 | 3,89 | 6,64 | 9,23 | ||
| 3 | 1 | 18 | 60 | 0,081 | 0,094 | 1,16 | 3,26 | 5,32 | 8,41 | 11.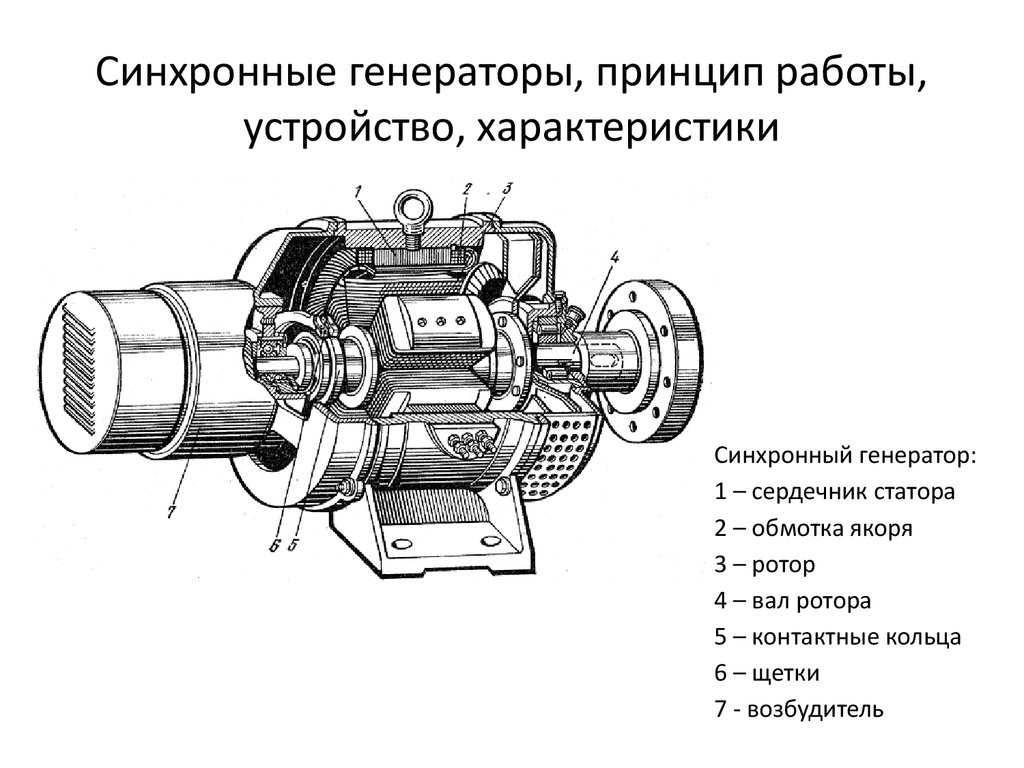 23 23 | ||
| 4 | 1 | 24 | 80 | 0,069 | 0,078 | 1,13 | 4,35 | 6,68 | 10.05 | 13.06 | ||
| 5 | 1 | 30 | 100 | 0,061 | 0,069 | 1,12 | 5,43 | 7,99 | 11,60 | 14,79 | ||
| 6 | 1 | 36 | 120 | 0,056 | 0,062 | 1.11 | 6,51 | 9,27 | 13.11 | 16,45 | ||
| 7 | 1 | 42 | 140 | 0,051 | 0,057 | 1.11 | 7,58 | 10,53 | 14,57 | 18.06 | ||
| 8 | 1 | 48 | 160 | 0,048 | 0,053 | 1.10 | 8,64 | 11,77 | 16. 00 00 | 19,62 | ||
Таблица 1: Обзор свойств фильтров n th порядка RC-фильтров с одинаковой постоянной времени. Динамические приложения обычно принимают во внимание f -3dB и время установления, в то время как для измерения шума учет правильного значения f NEP является ключом к получению точных результатов. С помощью приведенных выше соотношений можно легко вычислить постоянные времени фильтра для фильтров с одинаковой полосой пропускания, но разного порядка.
Из синей кривой на рисунке 7 (a) можно сделать вывод, что затухание увеличивается в десять раз при каждом десятикратном увеличении частоты выше f -3 дБ . Это равно 6 дБ/октаву (20 дБ/декаду), что соответствует уменьшению амплитуды в 2 раза при каждом удвоении частоты. Частота среза f -3 дБ определяется как частота, при которой мощность сигнала уменьшается на -3 дБ или наполовину. Амплитуда, пропорциональная квадратному корню из мощности, уменьшается на 1/√2 = 0,707 при f -3 дБ .
Для фильтра, описываемого уравнением 10, частота среза составляет f -3 дБ = 1/(2πτ). Из рисунка 7 (b) видно, что фильтр нижних частот также вводит фазовую задержку, зависящую от частоты, равную arg[H(ω)].
По сравнению с идеализированным фильтром кирпичной стены, фильтр первого порядка имеет довольно плохой спад. Чтобы увеличить крутизну спада, обычно каскадируют несколько таких фильтров. Для каждого добавленного фильтра порядок фильтра увеличивается на 1. Поскольку выход одного фильтра становится входом для следующего, мы можем просто перемножить их передаточные функции. Из подраздела 9с.\]
(11)
Его затухание в n раз превышает затухание фильтра первого порядка с общим спадом n × 20 дБ/дек. Частотные характеристики 1 st , 2 nd , 4 th и RC фильтра 8 th порядка показаны на рисунке 7 (a) и (b). Чем выше порядок фильтра, тем ближе передаточная функция амплитуды приближается к поведению фильтра кирпичной стены. В то же время фазовая задержка увеличивается с увеличением порядка фильтра. Для приложений, в которых фаза используется для подачи обратной связи в систему, например, для контуров с фазовой автоподстройкой, любая дополнительная фазовая задержка может ограничить стабильность и полосу пропускания контура управления.
В то же время фазовая задержка увеличивается с увеличением порядка фильтра. Для приложений, в которых фаза используется для подачи обратной связи в систему, например, для контуров с фазовой автоподстройкой, любая дополнительная фазовая задержка может ограничить стабильность и полосу пропускания контура управления.
На рис. 8 (a) и (b) показаны графики Боде для фильтров разного порядка с одинаковыми полосами пропускания f 90 139 -3 дБ 90 140, но разными постоянными времени. В таблице 1 представлены числовые отношения между соответствующими свойствами фильтра.
Для измерения шума часто бывает полезнее указать фильтр с точки зрения его эквивалентной шуму полосы пропускания мощности f NEP , а не полосы пропускания 3 дБ f -3 дБ . Полоса пропускания мощности, эквивалентная шуму, — это частота среза идеального фильтра с кирпичной стеной, который пропускает то же количество белого шума, что и фильтр, который мы хотим указать. Для каскадных RC-фильтров коэффициент преобразования между f NEP и f -3dB приведены в таблице 1.
После смешивания входного сигнала V s (t) с опорным сигналом √2 exp(-iω r t) спектр входного сигнала имеет вид сдвигается на частоту демодуляции ω r и становится V s (ω-ω r ). Фильтрация нижних частот дополнительно преобразует спектр посредством умножения на передаточную функцию фильтра H n (ω). Демодулированный сигнал Z(t) содержит все частотные компоненты вокруг опорной частоты, взвешенные по отклику фильтра
\[Z(\omega)=V_s(\omega-\omega_r)H_n(\omega).\]
(12)
Это уравнение ясно показывает, что демодуляция ведет себя как полосовой фильтр в том смысле, что он выделяет частотный спектр с центром в точке f r и простирается в каждую сторону на f -3 дБ . Кроме того, он показывает, что можно восстановить спектр входного сигнала вблизи частоты демодуляции f r , разделив преобразование Фурье демодулированного сигнала на передаточную функцию фильтра.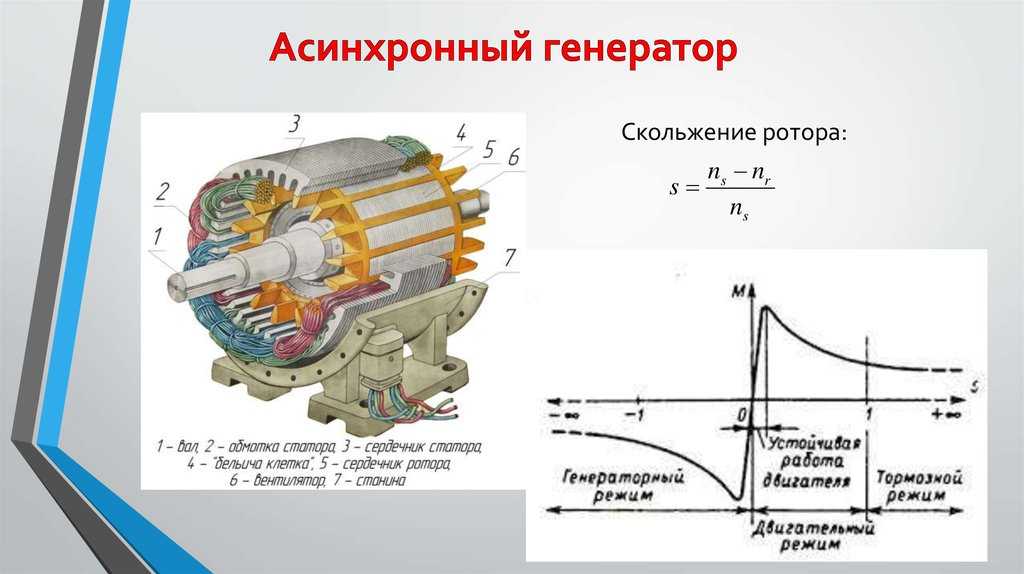 Эта форма спектрального анализа часто используется анализаторами спектра FFT и иногда называется zoomFFT [12].
Эта форма спектрального анализа часто используется анализаторами спектра FFT и иногда называется zoomFFT [12].
Фильтр нижних частот во временной области
Характеристики фильтра во временной области лучше всего визуализировать по его переходной характеристике, как показано на рис. 7 (c) и рис. 8 (c). Эти графики соответствуют ситуации, когда входной сигнал фильтра изменяется ступенчато от 0 до 1. Потребуется определенное время, прежде чем выходной сигнал фильтра установится на новом значении. Чтобы точно измерить сигнал, прошедший через фильтр, экспериментатор должен выждать достаточное время установления, прежде чем проводить измерение.
В таблице 1 указано время достижения 63,2 %, 90 %, 99 % и 99,9 % от конечного значения для фильтров разного порядка, но с одинаковой постоянной времени τ . Предположим, у нас есть сигнал частотой 1 МГц и мы хотим использовать фильтр порядка 4 с полосой пропускания 1 кГц на частоте около 1 МГц.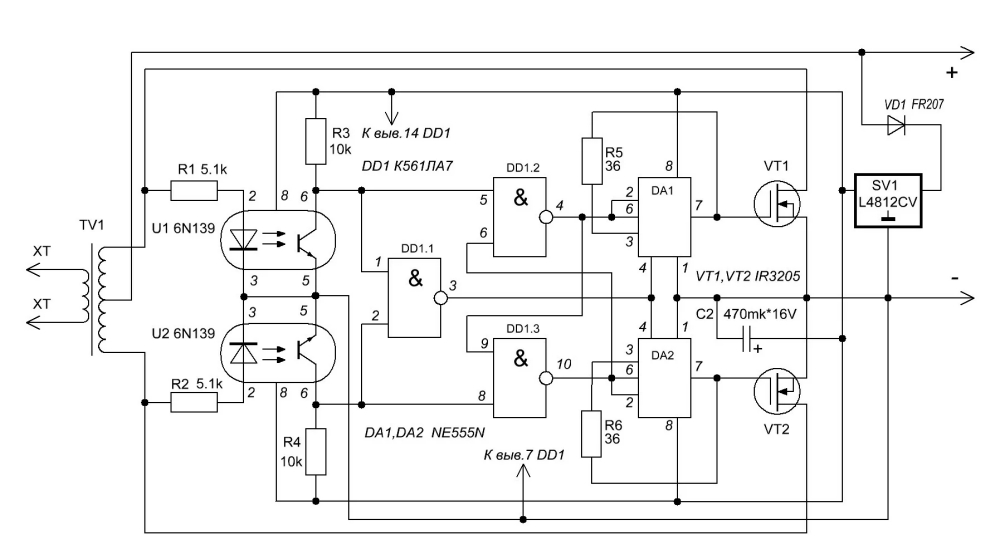 Из чисел, приведенных в таблице 1, мы можем сделать вывод, что постоянная времени составляет 69 мкс, а время установления до 1% ошибки составляет 0,7 мс.
Из чисел, приведенных в таблице 1, мы можем сделать вывод, что постоянная времени составляет 69 мкс, а время установления до 1% ошибки составляет 0,7 мс.
Динамика сигнала и ширина полосы демодуляции
Установка полосы пропускания демодуляции часто является компромиссом между временным разрешением и ОСШ. Рассмотрим амплитудно-модулированный (АМ) входной сигнал с несущей частотой f c = ω c /2π,
\[V_s(t)=\left [ 1+h\, cos(\omega_mt) \right ] \, cos(\omega_ct+\varphi_c)\]
(13)
, представленный на рисунке 9 в качестве примера, чтобы обсудить, как можно выполнить требования для различных экспериментальных вопросов. Амплитуда сигнала R(t) = 1 + hcos(ω м t), синяя кривая на рисунке 9, модулируется на частоте f м = ω м /2π вокруг среднего значения 1, где индекс модуляции h характеризует силу модуляции. Для этого примера мы выбираем несущие частоты и частоты модуляции f c = 2 кГц и f m = 100 Гц соответственно.
Для этого примера мы выбираем несущие частоты и частоты модуляции f c = 2 кГц и f m = 100 Гц соответственно.
Используя комплексное представление, представленное на рис. 3, на рис. 10 (а) показан AM-сигнал после микширования. Его модуль |1 + hcos(ω м t)| зависит от времени, но его угол φ c является константой. Член cos(ω м t) представляет собой сумму двух векторов вращения в противоположных направлениях exp(iω м t) и exp(-iω м t). Эти два вектора представляют верхнюю и нижнюю боковые полосы частотного спектра амплитудно-модулированного сигнала, как показано на рисунке 10 (d). На рис. 10 (b) и (c) показаны квадратурная и синфазная составляющие соответственно.
Рисунок 9: Амплитудно-модулированный сигнал: зеленая кривая — это входной сигнал несущей (для наглядности показан на более низкой частоте). Синяя кривая указывает амплитуду сигнала, которая является огибающей входного сигнала.
Рисунок 10: (a) Амплитудно-модулированный сигнал во вращающейся системе отсчета представляет собой вектор с зависящей от времени длиной. Мгновенный сигнал представлен толстой синей стрелкой; более тонкие стрелки отображают две боковые полосы AM-сигнала. (b) и (c) квадратурная и синфазная составляющие демодулированного входного сигнала: синяя кривая — нефильтрованный сигнал, штриховые черные, красные и голубые кривые — отфильтрованные сигналы с f -3dB = 500 Гц, 100 Гц и 20 Гц соответственно. (d) Частотный спектр демодулированного сигнала после фильтрации с тремя разными полосами пропускания (черная, красная и голубая кривые).
В большинстве случаев требуется измерение одной из следующих величин:
- зависимость амплитуды от времени R(t) = 1 + hcos(ω m t)
- среднее значение амплитуды ⟨R(t)⟩
- индекс модуляции h
В первой ситуации мы хотели бы, чтобы демодулированный сигнал следовал за изменениями амплитуды со скоростью f m .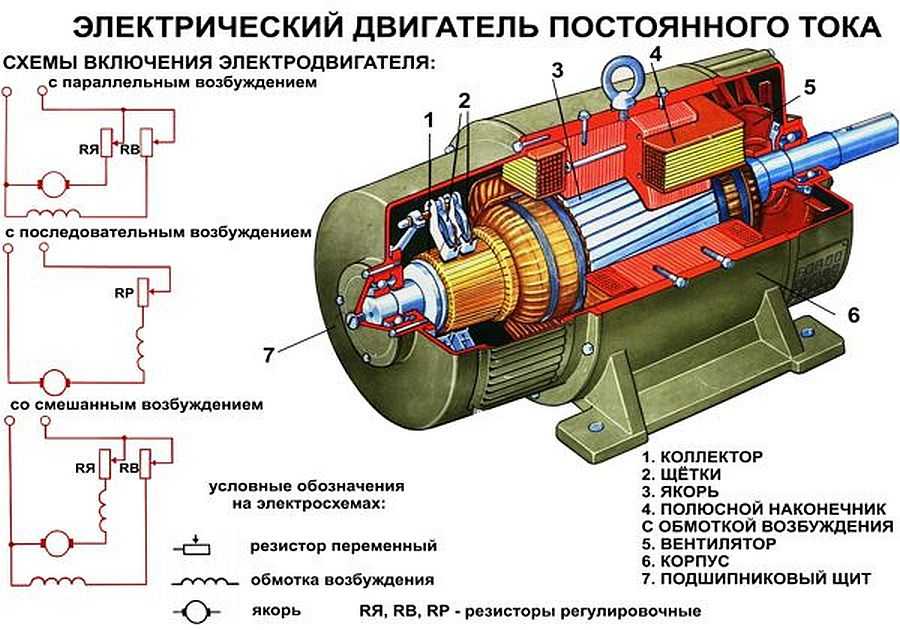 Для этого требуется полоса пропускания фильтра, значительно превышающая f m . Рассмотрим, например, 4 -й -порядковый фильтр с полосой пропускания f -3дБ = 500 Гц. При таком выборе передача на частоте f 90 139 м 90 140 = 100 Гц (то есть на расстоянии 100 Гц от несущей f 90 139 c 90 140 ) составляет около 98,5%, а фазовая задержка составляет около 20°, как можно рассчитать по уравнению 11 и таблице 1. Другими словами, сигнал модуляции лишь незначительно подвергается влиянию фильтра. Демодулированный сигнал отображается пунктирной черной линией на рисунке 10 (b) и (c).
Для этого требуется полоса пропускания фильтра, значительно превышающая f m . Рассмотрим, например, 4 -й -порядковый фильтр с полосой пропускания f -3дБ = 500 Гц. При таком выборе передача на частоте f 90 139 м 90 140 = 100 Гц (то есть на расстоянии 100 Гц от несущей f 90 139 c 90 140 ) составляет около 98,5%, а фазовая задержка составляет около 20°, как можно рассчитать по уравнению 11 и таблице 1. Другими словами, сигнал модуляции лишь незначительно подвергается влиянию фильтра. Демодулированный сигнал отображается пунктирной черной линией на рисунке 10 (b) и (c).
Помимо желаемого подавления/приема боковой полосы и фазовой задержки, важным критерием при выборе фильтра является уровень шума при измерении. На рис. 11 это показано на примере АМ-сигнала с относительно сильным шумом после демодуляции (а). На панели (б) показан тот же сигнал после фильтрации с частотой среза, равной частоте модуляции. Хотя этот фильтр устраняет большую часть шума, он вносит систематические изменения амплитуды и фазы, которые необходимо корректировать для получения точных результатов.
Для второго набора требований частотные составляющие, соответствующие боковым полосам, отбрасываются путем уменьшения ширины полосы фильтра до значения, меньшего, чем f m . Фильтр 4 -го порядка с f -3 дБ = 20 Гц, пунктирная голубая линия на рисунке 10 (d), подавляет боковые полосы на 0,03 или 30 дБ. Рисунок 11 (c) иллюстрирует влияние такого сильного фильтра на измерение.
В третьем случае мы хотим знать индекс модуляции h, но не должны разрешать полную динамику сигнала. Это используется, например, в силовой микроскопии с зондом Кельвина, где h является мерой электростатической силы между зондом и образцом в ответ на переменное напряжение при f м . Поскольку индекс модуляции пропорционален амплитуде боковых полос, это измерение можно выполнить, применяя узкие фильтры вокруг боковых полос в точках f c — f m и f c + f m . Это можно сделать двумя способами: так называемой тандемной демодуляцией или прямой демодуляцией боковой полосы.
При тандемной демодуляции мы сначала выполняем широкополосную демодуляцию вокруг центральной частоты. Результирующий сигнал, обычно похожий на сигнал на рисунке 11 (а), затем снова демодулируется при f м . Частота модуляции, доступная с помощью этого метода, не может быть больше, чем максимальная ширина полосы демодуляции первого блока синхронизации. При прямой демодуляции боковой полосы сигнал демодулируется при f c ± f m за один шаг, а доступные частоты модуляции ограничены только частотным диапазоном синхронного усилителя. Кроме того, прямая демодуляция боковой полосы работает с одним синхронным усилителем вместо двух, и поэтому обычно является предпочтительным выбором.
Рисунок 11: (a) Зашумленный входной сигнал создаст зашумленный демодулированный сигнал, синяя кривая. Базовый сигнал без шума показан черной пунктирной трассой. (b) Применение фильтра с полосой пропускания f 90 139 -3 дБ 90 140 = f 90 139 m 90 140 = 100 Гц устранит большую часть шума, но также повлияет на обнаруженный сигнал. (c) То же, что и (b), но с f 90 139 -3 дБ 90 140 = f 90 139 m 90 140 /5 = 20 Гц.
(c) То же, что и (b), но с f 90 139 -3 дБ 90 140 = f 90 139 m 90 140 /5 = 20 Гц.
Достижение высокого отношения сигнал/шум
Рисунок 12: Качественный спектр шума типичного эксперимента. Частоту измерения следует выбирать в области с небольшим фоном, избегая каких-либо дискретных пиков, исходящих от технических источников. В примере f 2 даст лучшие результаты, чем f 1 при той же полосе пропускания фильтра, так как он расположен в области чистого белого шума выше шума 1/f на низких частотах.
Уменьшение полосы пропускания фильтра обычно приводит к более высокому ОСШ за счет временного разрешения. Какие еще меры можно предпринять для улучшения SNR?
Если мощность сигнала не может быть увеличена, необходимо максимально уменьшить шум или избежать его. Однако шум всегда присутствует в аналоговых сигналах и возникает из-за различных источников, некоторые из которых имеют фундаментальное происхождение, например шум Джонсона-Найквиста (тепловой), дробовой шум и мерцающий шум, тогда как другие имеют техническое происхождение, как, например, заземление. петли, помехи, перекрестные помехи, шум 50–60 Гц или электромагнитные наводки. Величина случайного шума напряжения В шум (t) определяется его стандартным отклонением. В частотной области шум характеризуется спектральной плотностью мощности |v n (ω)| 2 в единицах В 2 /Гц или |v n (ω)| в единицах В/√Гц.
петли, помехи, перекрестные помехи, шум 50–60 Гц или электромагнитные наводки. Величина случайного шума напряжения В шум (t) определяется его стандартным отклонением. В частотной области шум характеризуется спектральной плотностью мощности |v n (ω)| 2 в единицах В 2 /Гц или |v n (ω)| в единицах В/√Гц.
Качественный спектр на рисунке 12 показывает, что разные источники шума имеют разные частотные зависимости: в то время как шум Джонсона-Найквиста имеет плоский спектр для всех практических частот и, следовательно, вносит вклад в «белый шум», мерцающий шум имеет частотную зависимость 1/f ( «розовый шум»). Если есть некоторая свобода в выборе частоты модуляции, мы можем приблизиться к той части спектра, где уровень шума самый низкий. Часто более высокие частоты, где спектр состоит из характеристик белого шума, работают лучше всего. Рисунок 12 иллюстрирует этот подход: количество шума внутри фильтра, обозначенное областью, заполненной синим и серым цветом, больше, например, в области более низких частот шума 1/f. Следовательно, ОСШ при f 9{2}}}\) = 0,127 √R нВ/√Гц = 127 нВ/√Гц при Т = 300 К комнатной температуре 1 . В этом примере тепловой шум определяется как доминирующий источник шума. Он явно сильнее, чем входной шум синхронизации, обычно менее 10 нВ/√Гц. Таким образом, мы можем рассчитать SNR как
Следовательно, ОСШ при f 9{2}}}\) = 0,127 √R нВ/√Гц = 127 нВ/√Гц при Т = 300 К комнатной температуре 1 . В этом примере тепловой шум определяется как доминирующий источник шума. Он явно сильнее, чем входной шум синхронизации, обычно менее 10 нВ/√Гц. Таким образом, мы можем рассчитать SNR как
\[SNR=\frac{1\mu V}{127nV/\sqrt{Hz}\cdot\sqrt{f_{NEP}}}=10\]
(14)
Решая это уравнение для f NEP , мы вычисляем, что нам нужно выбрать полосу пропускания фильтра NEP 620 мГц или меньше, чтобы достичь SNR 10. Мы выбираем 4 -й фильтр заказа. Из таблицы 1 мы можем рассчитать соответствующую частоту среза f -3dB = 549 мГц, постоянную времени τ = 126 мс, а время установления до 1% составляет 1,26 с.
Для дальнейшего увеличения SNR в 10 раз нам потребуется уменьшить ширину полосы фильтра в 100 раз, поскольку амплитуда шума пропорциональна квадратному корню из ширины полосы. Затем время установления до 1% увеличивается до более чем 2 минут. Метод блокировки может поддерживать такие длительные измерения, потому что он нечувствителен к дрейфу смещения постоянного тока во входном сигнале. Тем не менее другие источники дрейфа, такие как изменения сопротивления ИУ или коэффициента усиления усилителя, могут повлиять на длительные измерения. Поддержание стабильных условий и особенно постоянной температуры имеет решающее значение.
Метод блокировки может поддерживать такие длительные измерения, потому что он нечувствителен к дрейфу смещения постоянного тока во входном сигнале. Тем не менее другие источники дрейфа, такие как изменения сопротивления ИУ или коэффициента усиления усилителя, могут повлиять на длительные измерения. Поддержание стабильных условий и особенно постоянной температуры имеет решающее значение.
Уровень развития
С начала 1930-х годов синхронные усилители прошли долгий путь. Начав с электронных ламп как базовой инструментальной технологии, мы отмечаем, что переход к цифровым технологиям идет полным ходом, но еще не завершен. В цифровых синхронных усилителях входной сигнал немедленно преобразуется в цифровую форму с помощью аналого-цифрового преобразователя (АЦП), а все последующие этапы затем выполняются численно с помощью цифровой обработки сигналов (DSP), как показано на рисунке 13. (б). Напротив, в аналоговых синхронных усилителях для обработки сигналов используются аналоговые элементы, такие как управляемые напряжением генераторы, смесители и простые RC-фильтры. Существуют также гибридные версии [9], как показано на рисунке 13 (а), которые оцифровывают сигналы только после этапа аналогового микширования до или после фильтрации.
Существуют также гибридные версии [9], как показано на рисунке 13 (а), которые оцифровывают сигналы только после этапа аналогового микширования до или после фильтрации.
Рисунок 13: (a) Аналоговый синхронный усилитель: сигнал разделяется на два пути, смешивается с опорным сигналом, фильтруется и затем преобразуется в цифровой. (b) Цифровой синхронный усилитель: сигнал оцифровывается, затем умножается на опорный сигнал и фильтруется.
Рисунок 14: Усилитель с синхронизацией UHFLI от Zurich Instruments, представляющий собой современную технологию синхронизации. Полоса входного сигнала 600 МГц, а также полоса демодуляции 5 МГц делают его самым быстрым синхронным усилителем на современном рынке. Кроме того, 19прибор шириной в дюйм включает в себя наибольшее количество функций, см. рис. 16, и в то же время предоставляет самое передовое программное обеспечение для управления прибором LabOne ® (см. рис. 15).
Переход от аналогового к цифровому был вызван доступностью АЦП и ЦАП с постоянно увеличивающейся скоростью, разрешением и линейностью. Эта разработка помогла расширить частотный диапазон, входной шум и динамический резерв до новых пределов. Кроме того, цифровая обработка сигналов гораздо менее подвержена ошибкам, вызванным несоответствием путей прохождения сигнала, перекрестным помехам и дрейфам, вызванным, например, изменениями температуры. Это особенно критично на высоких частотах. Но самым большим преимуществом цифрового подхода, вероятно, является возможность одновременного анализа сигнала несколькими способами без потери SNR. Как упоминалось ранее, это обеспечивает не только более качественную двухфазную демодуляцию, но и прямой анализ нескольких частотных составляющих сигнала без необходимости каскадирования нескольких приборов со всеми сопутствующими негативными эффектами.
Эта разработка помогла расширить частотный диапазон, входной шум и динамический резерв до новых пределов. Кроме того, цифровая обработка сигналов гораздо менее подвержена ошибкам, вызванным несоответствием путей прохождения сигнала, перекрестным помехам и дрейфам, вызванным, например, изменениями температуры. Это особенно критично на высоких частотах. Но самым большим преимуществом цифрового подхода, вероятно, является возможность одновременного анализа сигнала несколькими способами без потери SNR. Как упоминалось ранее, это обеспечивает не только более качественную двухфазную демодуляцию, но и прямой анализ нескольких частотных составляющих сигнала без необходимости каскадирования нескольких приборов со всеми сопутствующими негативными эффектами.
После перехода от аналогового к цифровому, еще один важный шаг инноваций был вызван доступностью программируемых вентильных матриц (FPGA) с высокой вычислительной мощностью, большим объемом памяти и скоростью. ПЛИС хорошо понимают как цифровые часовые механизмы, которые можно гибко запрограммировать для выполнения практически любой желаемой задачи обработки сигналов в режиме реального времени. Естественным расширением блокировки является добавление анализа во временной и частотной областях до и после демодуляции, что в противном случае было бы сделано с помощью отдельного анализатора спектра и осциллографа. Кроме того, один прибор может содержать усреднители с закрытыми цепями для анализа сигналов с малой скважностью, ПИД- и ФАПЧ-регуляторы для контуров обратной связи и арифметические блоки для обработки данных измерений в режиме реального времени. Затем сигналы измерений могут быть переданы на компьютер для дальнейшего анализа. Если требуется аналоговый интерфейс для другого прибора, данные измерений от различных функциональных блоков легко преобразуются обратно в аналоговую область с помощью ЦАП высокого разрешения.
Естественным расширением блокировки является добавление анализа во временной и частотной областях до и после демодуляции, что в противном случае было бы сделано с помощью отдельного анализатора спектра и осциллографа. Кроме того, один прибор может содержать усреднители с закрытыми цепями для анализа сигналов с малой скважностью, ПИД- и ФАПЧ-регуляторы для контуров обратной связи и арифметические блоки для обработки данных измерений в режиме реального времени. Затем сигналы измерений могут быть переданы на компьютер для дальнейшего анализа. Если требуется аналоговый интерфейс для другого прибора, данные измерений от различных функциональных блоков легко преобразуются обратно в аналоговую область с помощью ЦАП высокого разрешения.
На сегодняшний день самым передовым прибором с точки зрения скорости и уровня интеграции является UHFLI [13] компании Zurich Instruments, представленный в 2013 году. На рис. 14 показана передняя панель прибора. UHFLI имеет входную полосу пропускания сигнала 600 МГц и максимальную полосу демодуляции 5 МГц, что делает его самым быстрым синхронным усилителем на современном рынке. Несмотря на высокую скорость, он по-прежнему обеспечивает исключительные характеристики входного шума всего 4 нВ/√Гц и динамический резерв 100 дБ. Высокий уровень интеграции показан на рисунке 16, на котором показаны основные функциональные компоненты UHFLI и их взаимосвязи. Функциональность, для которой раньше требовалась целая стойка с инструментами, теперь размещена в одном инструменте размером не больше обувной коробки.
Несмотря на высокую скорость, он по-прежнему обеспечивает исключительные характеристики входного шума всего 4 нВ/√Гц и динамический резерв 100 дБ. Высокий уровень интеграции показан на рисунке 16, на котором показаны основные функциональные компоненты UHFLI и их взаимосвязи. Функциональность, для которой раньше требовалась целая стойка с инструментами, теперь размещена в одном инструменте размером не больше обувной коробки.
Очевидно, что богатством функций, показанных на рис. 16, нельзя управлять и использовать с помощью нескольких ручек и кнопок на передней панели. Вместо этого UHFLI полностью управляется с компьютера, на котором работает LabOne ® , программное обеспечение для управления прибором, использующее новейшую технологию браузера, которая обеспечивает графический пользовательский интерфейс для любого устройства с веб-браузером, см. рис. 15. Инструменты высокого уровня, такие как Parametric Sweeper, Software Trigger или PID Advisor используют доступную вычислительную мощность главного компьютера для задач измерения, что повышает достоверность результатов измерений и обеспечивает более эффективный рабочий процесс. Кроме того, LabOne также предлагает программные интерфейсы для LabVIEW 9.0143® , MATLAB ® , Python и C# для удобной интеграции измерительного прибора в существующие среды управления экспериментом.
Кроме того, LabOne также предлагает программные интерфейсы для LabVIEW 9.0143® , MATLAB ® , Python и C# для удобной интеграции измерительного прибора в существующие среды управления экспериментом.
Рисунок 15: Пользовательский интерфейс LabOne ® синхронного усилителя UHFLI использует новейшую технологию веб-браузера. Прибором можно управлять из нескольких сеансов браузера на нескольких ПК, планшетах и т. д. одновременно. Каждый инструмент анализа и контроля сигналов имеет специальную вкладку. Некоторые функции интуитивно отображаются в виде блок-схем.
Рисунок 16: Блок-схема, показывающая основные функциональные элементы Zurich Instruments UHFLI и поток сигналов между ними. Быстрая обработка цифровых сигналов происходит внутри ПЛИС прибора с тактовой частотой 450 МГц, а также на компьютере, подключенном через USB или 1GbE, на котором установлено программное обеспечение для управления прибором LabOne ® . Основными функциональными компонентами внутри прибора являются 8 двухфазных демодуляторов, осциллограф (Scope) с функциями дигитайзера (DIG) и БПФ, модули PID с возможностью PLL, арифметический блок (AU), усреднитель коробчатого типа с периодическим анализатором формы сигнала ( PWA) и модуль счетчика импульсов (CNT). Для генерации сигналов в приборе предусмотрены генераторы синусоидальных сигналов (OSC) и генераторы сигналов произвольной формы (AWG) для сигналов сложной формы. Управляющее программное обеспечение LabOne, работающее на ПК, добавляет параметрический анализатор, анализатор спектра, отображение числовых параметров (Num), плоттер, программный триггер для анализа во временной области и анализатор гармоник (Harm).
Для генерации сигналов в приборе предусмотрены генераторы синусоидальных сигналов (OSC) и генераторы сигналов произвольной формы (AWG) для сигналов сложной формы. Управляющее программное обеспечение LabOne, работающее на ПК, добавляет параметрический анализатор, анализатор спектра, отображение числовых параметров (Num), плоттер, программный триггер для анализа во временной области и анализатор гармоник (Harm).
Ссылки
[1] C. R. Cosens. Баланс-детектор для мостов переменного тока. Proceedings of the Physical Society, 46:818, 1934.
[2] WC Michels. Двухтрубный вакуумный вольтметр. преподобный наук. Instrum., 9:10, 1938.
[3] WC Michels and N.L. Curtis. Пентодный синхронный усилитель высокой частотной избирательности. преподобный наук. Instrum., 12:444, 1941.
[4] Интервью Роберта Дике с Мартином Хавритом. Библиотека и архивы Нильса Бора, Колледж-Парк, Мэриленд: Американский институт физики, www.aip.org/history-programs/niels- бор-библиотека/устные истории/4572, 1985. Дата обращения: 21 октября 2016 г.
Дата обращения: 21 октября 2016 г.
[5] Zurich Instruments HF2LI. http://www.zhinst.com/products/hf2li. Дата обращения: 21 октября 2016 г.
[6] А. М. Скеллетт. Coronaviser, инструмент для наблюдения за солнечной короной при полном солнечном свете. Proc Natl Acad Sci USA, 26(6):430, 1940.
[7] D. C. Tsui, H. L. Stormer и A. C. Gossard. Двумерный магнитотранспорт в предельном квантовом пределе. физ. Rev. Lett., 48:1559, 1982.
[8] L. Gross et al. Дискриминация порядка связи с помощью атомно-силовой микроскопии. Наука, 337(6100):1326, 2012.
[9] Стэнфордское исследование SR844. http://www.thinksrs.com/products/SR844.htm. Дата обращения: 21 октября 2016 г.
[10] Статья в Википедии: Преобразование Фурье. https://en.wikipedia.org/wiki/Fourier_transform. Дата обращения: 21 октября 2016 г.
[11] Статья в Википедии: Ряды Фурье. https://en.wikipedia.org/wiki/Fourier_series. Дата обращения: 21 октября 2016 г.
[12] Н. Трейн. Зум-БПФ.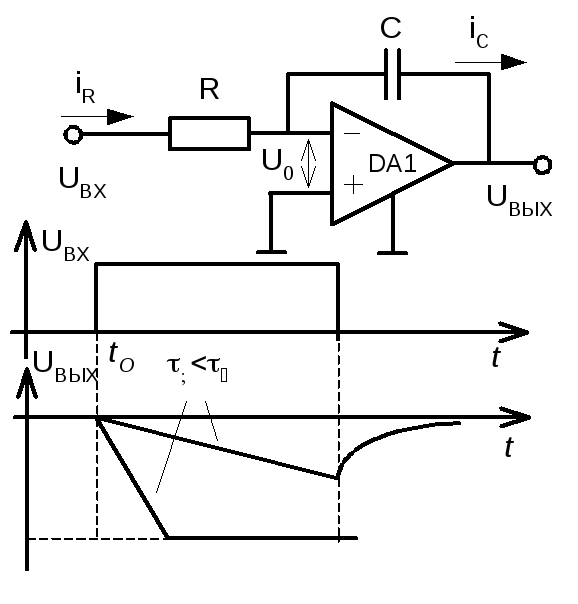 Технический обзор Brüel & Kjær, (2):3, 1980.
Технический обзор Brüel & Kjær, (2):3, 1980.
[13] Zurich Instruments UHFLI. http://www.zhinst.com/products/uhfli. Дата обращения: 21 октября 2016 г.
Его конструкция, принцип работы и преимущества
Одним из наиболее известных устройств в электрических и электрических цепях является усилитель. Это в основном используется для усиления сигналов. Усиление может быть сделано с помощью нескольких типов усилителей. И классификация усилителей осуществляется в зависимости от различных факторов, таких как напряжение, ток, импеданс и уровни емкости. Немногие из них являются усилителями мощности, тока и напряжения. Кроме них, уникальная классификация настроенных усилителей. Итак, в этой статье показано четкое объяснение настроенного усилителя, его типов, работы и приложений.
Определение: Одной из наиболее известных схем в области электроники является настроенный усилитель, в котором наиболее часто используются для выбора определенных частотных диапазонов. Само название говорит о том, что настройка соответствует выбору. Выбираются нужные частоты, а остальные отбрасываются. Когда усилитель используется вместо нагрузки, он называется схемой настроенного усилителя .
Само название говорит о том, что настройка соответствует выбору. Выбираются нужные частоты, а остальные отбрасываются. Когда усилитель используется вместо нагрузки, он называется схемой настроенного усилителя .
Настроенный усилитель
В этой схеме полоса пропускания увеличивается с увеличением количества связи. Решающим параметром в этой схеме является не добротность, а коэффициент связи. Таким образом, это означает, что более высокая пропускная способность может быть получена при максимальной связи. Полоса пропускания этой схемы может быть определена как
B.W = kf r
Здесь «k» — коэффициент связи, а «fr» соответствует резонансной частоте. чтобы разрешить выбранный диапазон частот. Резонансная частота называется центральным частотным уровнем выбранных частотных диапазонов. Как правило, эти схемы, как известно, обеспечивают максимальное усиление, так что высокие значения импеданса тоже. Эти усилители в основном сконструированы для обеспечения сигналов минимальной частоты B. W. А частотный диапазон схемы дается
W. А частотный диапазон схемы дается
fr = 1/(2∏(sqrt(LC))
Частотная характеристика выглядит следующим образом:
Частотная характеристика
Стабильность
Это может быть сделано полностью и эффективно.Даже это снижает процесс воспроизведения.Это означает стабильность настроенного усилителя .
Типы
Классификация этих усилителей приведена ниже
- Однокаскадный усилитель
- Двухкаскадный усилитель
- Ступенчатый усилитель
Однокаскадный настраиваемый усилитель
Схема усилителя, имеющая однокаскадную секцию настройки, расположенную на коллекторе усилителя, называется схемой однокаскадного усилителя.
Обтекаемая схема усилителя, построенная таким образом, что параллельно настроенная схема расположена на нагрузке коллектора. Для этой схемы значения индуктивности и емкости выбираются таким образом, чтобы резонансная частота была близка к усиливаемой частоте. Здесь выходной сигнал поступает либо от вторичной обмотки, либо от разделительного конденсатора.
Здесь выходной сигнал поступает либо от вторичной обмотки, либо от разделительного конденсатора.
Рабочий
Сигнал, который необходимо усилить, подается на вход усилителя. Путем изменения значений емкости резонансная частота может быть аналогична частоте подаваемого сигнала. Такое подключение позволяет обеспечить максимальные значения импеданса на частоте сигнала, что косвенно указывает на возможность получения максимальной мощности. Только на настроенном уровне частоты принимается максимальное сопротивление, другой уровень частот устраняется настроенным контуром. Итак, основная работа этой схемы состоит в том, чтобы выбрать сигнал и позволить ему пройти процесс усиления.
Двухкаскадный настроенный усилитель
Схема усилителя, имеющая двухкаскадную секцию настройки, расположенную на коллекторе усилителя, называется двухкаскадной схемой настроенного усилителя . Конструкция:
Обтекаемая схема усилителя, построенная таким образом, что две параллельные настроенные схемы расположены на нагрузке коллектора. По принципу взаимной связи выход первой настроенной схемы подается на вход второй настроенной схемы.
По принципу взаимной связи выход первой настроенной схемы подается на вход второй настроенной схемы.
Двухкаскадный регулируемый усилитель
Сигнал, который необходимо усилить, подается на вход усилителя. Здесь частота первой настроенной цепи настраивается как частота сигнала, чтобы обеспечить максимальное реактивное сопротивление. Следовательно, на выходе получается максимальный выходной сигнал, который подается на второй настроенный контур. Таким образом, общая выходная мощность высока и поэтому широко используется для приложений телевизионных и радиоприемников.
Усилитель со сдвиговой настройкой
Общий диапазон частот настроенных усилителей расширяется за счет усилителей со сдвиговой настройкой. Весь отклик демонстрирует повышенную неравномерность по всей центральной полосе частот. Для выполнения этой операции должны работать несколько настроенных цепей. Отдельные выходы настроенных цепей складываются для получения полного отклика, и это выполняется с помощью усилителя, настроенного в шахматном порядке. Поскольку уровни частот каждой схемы либо смещены, либо сдвинуты, это название — усилитель с ступенчатой настройкой. Основным преимуществом этого является повышенный уровень пропускной способности. Частотная характеристика может быть показана ниже:
Поскольку уровни частот каждой схемы либо смещены, либо сдвинуты, это название — усилитель с ступенчатой настройкой. Основным преимуществом этого является повышенный уровень пропускной способности. Частотная характеристика может быть показана ниже:
Частотная характеристика ступенчато настроенного усилителя
Другие типов настроенных усилителей :
Настроенный усилитель класса C
В схемах этого типа смещение делается таким образом, чтобы проводимость была минимальной до 180 0 . По сравнению с усилителями класса A, класса B и класса AB усилители C-типа демонстрируют повышенную эффективность, заключающуюся в максимальной выходной мощности. Поскольку эти схемы работают через нелинейные входные функции, они неэффективны для целей линейного усиления. Настроенные усилители класса C, используемые в устройстве, имеют устройства модуляции постоянной выходной амплитуды. По этой причине сигнал максимальной частоты обрабатывается через сигнал минимальной частоты.
Синхронно настроенный усилитель –
Когда настроенные усилители находятся в каскадной фазе и когда все эти усилительные каскады аналогичны частоте f 0 , тогда это называется синхронно настроенным усилителем. Это соединение позволяет уменьшить полосу пропускания и увеличить прибыль.
Применение настроенного усилителя
Настроенные усилители используются в основном для
- Выбор конкретных частотных диапазонов
- Усиление сигнала до соответствующих уровней
- Телевизионные приемники
- Радиоприемники
- Используется в цепях беспроводной связи
Преимущества/недостатки настроенного усилителя
Преимущества:
- Высокий диапазон избирательности
- Минимальные уровни напряжения коллектора
- Снижение потерь мощности
- Может принимать максимальный выходной сигнал, а также хорошее соотношение сигнал/шум
- Широко применим для радио- и телеприемников и передатчиков
Часто задаваемые вопросы
1). В каком диапазоне частот используются перестраиваемые усилители?
В каком диапазоне частот используются перестраиваемые усилители?
Настроенные усилители используют частоты в диапазоне от 20 Гц до 20 кГц.
2). Что понимается под настроенной схемой?
Настроенный термин определяет комбинацию конденсатора и катушки индуктивности, и эта комбинация позволяет нам выбирать определенные частоты.
3). Что такое электронный настроенный усилитель?
Настроенный усилитель считается электронным, если его схема состоит из полосовых фильтров.
4). Что такое одинарная настроенная цепь?
Цепь, которая работает как настроенная цепь, состоящая из одной индуктивности и емкости, называется одиночной настроенной цепью.
5). Зачем нужна ступенчатая настройка?
Пошаговое регулирование необходимо для увеличения уровней полосы пропускания многокаскадного усилителя, чтобы улучшить общий коэффициент усиления.
Наконец, речь идет о концепции настроенных усилителей.