
Что собой представляет синхронный реактивный двигатель?
Содержание
- 1 Конструктивные особенности
- 2 Принцип функционирования реактивного мотора
- 2.1 Диаграмма
- 3 Уравнение реактивного двигателя
- 4 Сильные и слабые стороны моторов
- 5 Сферы использования
- 6 Выводы
Синхронный двигатель реактивного типа – довольно функциональная разработка, позволяющая обеспечивать требуемый уровень мощности и решать задачи, которые не под силу другим типам моторов. Обладают модели своими конструктивными особенностями, которые заслуживают особого внимания. Их мы и опишем.
Синхронный реактивный двигатель
Применение электрических двигателей существенно улучшает показатели развития промышленной и бытовой отраслей, повышает показатели автоматизации производства. На сегодняшний день на рынке представлено множество разнотипных силовых агрегатов, находящих свое применение в разнообразных отраслях деятельности. Сегодня мы поговорим о синхронных реактивных двигателях. Каждый такой мотор – это привычный нам синхронный электрический двигатель, но его момент вращения обусловливается различиями магнитных проводимостей по двум роторным осям: продольной и поперечной. Сам же якорь не обладает постоянными магнитами или намотками возбуждения.
Сегодня мы поговорим о синхронных реактивных двигателях. Каждый такой мотор – это привычный нам синхронный электрический двигатель, но его момент вращения обусловливается различиями магнитных проводимостей по двум роторным осям: продольной и поперечной. Сам же якорь не обладает постоянными магнитами или намотками возбуждения.
Стационарная часть мотора – статор, комплектуется обмотками двух типов: или распределенного, или сосредоточенного. Также конструкция включает корпус и металлический сердечник, который также включает обмотку.
Ротор же представлен сразу в трех модификациях:
- с полюсами явновыраженного типа;
- аксиально – расслоенной конструкции;
- поперечно – расслоенный.
Каждый ротор создает момент вращения посредством уровня магнитного сопротивления. Такой тип электродвигателя относится к агрегатам с индивидуальным возбуждением, и ротор, используемый в этом моторе, является несимметричным. Всего существует несколько вариаций таких силовых агрегатов, но модели синхронного типа действия являются наиболее распространенными.
Всего существует несколько вариаций таких силовых агрегатов, но модели синхронного типа действия являются наиболее распространенными.
Пример ротора синхронного реактивного
Принцип функционирования реактивного мотораОбмотки статора пропускают через себя ток переменного типа, с помощью чего и создается магнитное поле, которое находится в постоянном вращении в воздушном зазоре мотора. Момент вращения генерируется сразу после того, как роторных компонент начинает устанавливать свою ось, которая будет наиболее магнито проводящей с приложенным полем. На рисунке она отмечается как ось d. Делается это для того, чтобы свести к минимуму уровни магнитного сопротивления в аналогичной цепи.
Далее принцип работы подразумевает возникновение моментной амплитуды, которая является прямо пропорциональной разнице двух показателей: поперечной Lq и продольной Ld индуктивностями. Исходя из этого, можно утверждать, что чем выше эта разница, тем больше генерируемый момент.
Магнитопроводящие оси
Рассмотрим данную ситуацию на примере еще одной схемы. Итак, как можно видеть, на рисунке изображен определенный объект, выполненный из анизотропных материалов, маркируется «а». Он обладает разными показателями проводимости, которые отображены на двух осях: q и d. Объект же b выполненный из изотропного материала с магнетизмом, обладает одинаковыми уровнями проводимости, независимо от направления. Магнитное поле, прикладываемое к объекту «а», генерирует вращающийся момент в ситуации, когда есть угол между линиями магнитного поля и осью d. Если же последняя не будет совпадать с характеристиками магнитных полей, то объект будет всячески искажать само магнитное поле. Стоит отметить, что направленность этих искаженных линий магнитного типа, будет совпадать с траекторией оси q.
Итак, как можно видеть, на рисунке изображен определенный объект, выполненный из анизотропных материалов, маркируется «а». Он обладает разными показателями проводимости, которые отображены на двух осях: q и d. Объект же b выполненный из изотропного материала с магнетизмом, обладает одинаковыми уровнями проводимости, независимо от направления. Магнитное поле, прикладываемое к объекту «а», генерирует вращающийся момент в ситуации, когда есть угол между линиями магнитного поля и осью d. Если же последняя не будет совпадать с характеристиками магнитных полей, то объект будет всячески искажать само магнитное поле. Стоит отметить, что направленность этих искаженных линий магнитного типа, будет совпадать с траекторией оси q.
Синхронный реактивный двигатель генерирует магнитное поле с использованием обмотки статора, распределенной синусоидально. Поле оборачивается с синхронной скоростью и считается синусоидальным.
Для обеспечения слаженной работы, необходимо, чтобы всегда был момент, нацеленный на уменьшение полной потенциальной энергии в системе, посредством снижения уровня полевого искажения.
Анизотропная геометрия
Статорный ток регулирует намагничивание и генерирование крутящего момента, с помощью которого можно уменьшать искаженность поля. Регулирование момента проводится путем мониторинга токовых фаз, по сути – угла между двум величинами:
- осью d ротора в системе координат вращений;
- током статорных намоток.
Векторная диаграмма синхронного реактивного двигателя включает в себя несколько аспектов. Самая важная характеристика этого двигателя — постоянная скорость. Вначале, если ротор не может подключиться через магнитное поле статора, в этой ситуации на ум приходит демпферная обмотка. Они также используются в двигателях синхронного действия.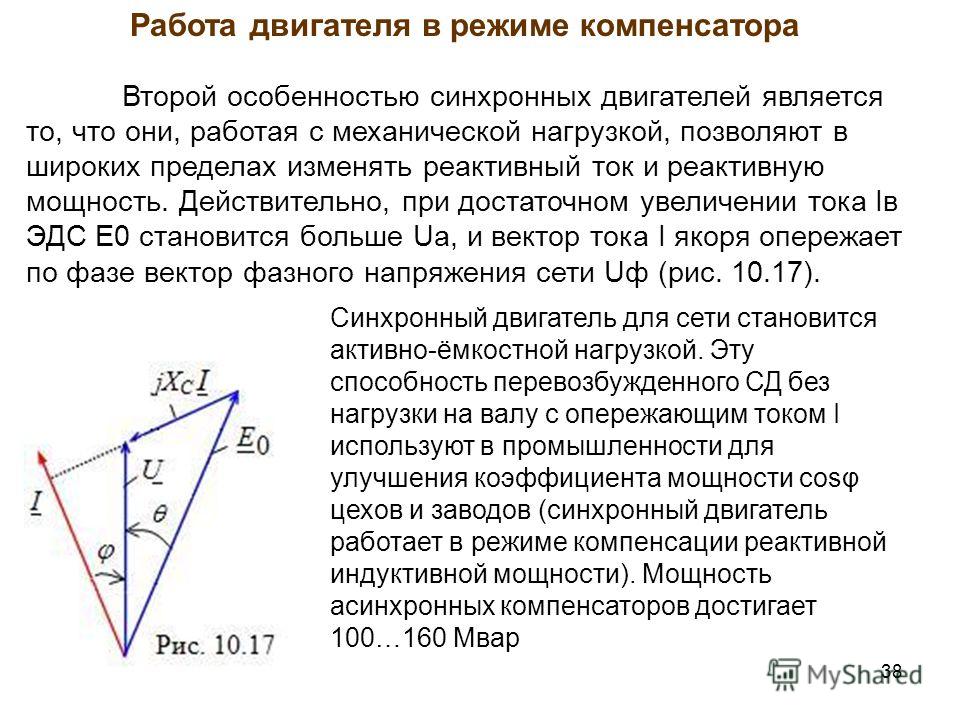
Размещение данных намоток может выполняться внутри наконечников полюсов, создающих момент демпфирования через несоответствие относительных скоростных параметров ротора или статорного магнитного поля.
Пример диаграммы фазора
Это явление имеет место, когда ротор не срабатывает, тем самым, не обеспечивая подключение через статор. Демпфирующий момент вращения генерируется исходя из физического закона Ленца, согласно которому имеет место несоответствие скоростей движения роторного магнитного поля и непосредственно статором.
Крутящий момент демпфирующий осуществляет перемещение намотки ротора таким образом, чтобы она блокировалась через поле статора.
Уравнение реактивного двигателяРанее мы уже описывали такую характеристику двигателя, как крутящий момент, сейчас давайте же рассмотрим вкратце его уравнение. Оно важно, когда осуществляется проектирование синхронного реактивного электродвигателя, ведь позволяет учитывать все его важные параметры.
Вот как выглядит уравнение:
Уравнение
Условные обозначения:
- Te — момент вращения, максимально возможный;
- P – ситуация отсутствия полюсов;
- Ψ – индуцированное потокосцепление с помощью тока возбуждения;
- Lds – показатель индуктивности согласно прямой оси;
- Lqs – индуктивность оси квадратурности;
- δ – число угла крутящего момента.
Соотношение показателей Ldm/Lqm в реактивных моторах синхронного типа довольно высокое, что обусловливает наличие высокого коэффициента полезного действия. Также, такие силовые агрегаты работают на высоких скоростях, что существенно их выделяет на фоне остальных вариантов исполнения.
Высокие отношения между Ldm и Lqm обусловлены применением в процессе разработки анизотропной конструкции.
Сильные и слабые стороны моторовКомпоновка реактивных моторов обладает множеством особенностей, которые позволяют выделять агрегаты в новый, самостоятельный вид.
К преимуществам относят:
- простота и надежность конструкции ротора, которая включает элементы, изготовленные из электротехнической стали тонколистового литья. Магнитов и короткозамкнутой обмотки нет;
- низкий уровень нагрева даже при интенсивной эксплуатации. Токи в якоре отсутствуют, таким образом, просто нет факторов, которые бы усиливали нагрев и, следственно – сокращали срок применения;
- отсутствие необходимого уровня возбуждения поля при наличии нулевого момента вращения, что обусловливает полное отсутствие потерь в электромагнитных вращениях;
- отсутствие магнитов. Данный фактор позволяет снижать общую стоимость устройства, без снижения продуктивности. Затраты на обслуживание и содержание, также сокращаются;
- снижение момента инерции ротора. Данный показатель существенно ниже из-за того, что конструкция ротора не предусматривает наличия ни магнитов, ни обмотки.
 Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию;
Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию; - регулирование скорости. Исходя из того, что для максимально полной эффективности работы синхронного реактивного двигателя нужно установить частотный преобразователь, в моторе есть функция управления скоростями оборотов в широких диапазонах.
 Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию;
Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию;Применение такого силового агрегата экономически выгодное и довольно простое в сервисном обслуживании.
Статор и ротор в разрезе
Недостатки:
- реализованное только управление частотного типа. чтобы осуществлять точное управление необходимо дополнительно установить частотный преобразователь;
- низкие коэффициенты мощности. Обусловливается тем, что генерирование магнитного потока осуществляется при помощи реактивного тока. Решить этот вопрос можно, опять же, применив преобразователь частоты напряжения.
 Обусловливается тем, что генерирование магнитного потока осуществляется при помощи реактивного тока. Решить этот вопрос можно, опять же, применив преобразователь частоты напряжения.
Обусловливается тем, что генерирование магнитного потока осуществляется при помощи реактивного тока. Решить этот вопрос можно, опять же, применив преобразователь частоты напряжения.Моторы реактивного способа действия довольно широко распространены в хозяйственной отрасли. Вот основные области применения:
- маломощное текстильное оборудование. Здесь ключевой фактор при выборе – низкая стоимость, прочность конструкции, простота устройства;
- приложения, в которых требуется наличие постоянной скорости: таймеры, фонографы, управленческие устройства, приборы записи и др.;
- в дозирующем оборудовании, конвейерах, насосах;
- в регуляторах, поворотных механизмах, оборудовании для изготовления синтетических волокон;
- упаковочных машинах, вспомогательном оборудовании;
- при производстве изделий из сплошных листов (металла, например), пленочного материала.

Применение двигателя данного типа обеспечит не только высокую продуктивность и защищенность управляемого оборудования, а также хорошие экологические и экономические показатели. Немаловажную роль в этих преимуществах играет отсутствие магнитов, применение которых обусловливает свои особенности, в частности необходимость регулярной замены.
Такие модели реактивного типа обладают параметрами, характерными другим видам, например, простотой компоновки асинхронных агрегатов и высоким КПД синхронных устройств. Несмотря на сильные стороны, приборы не лишены недостатков, но, преимущества перекрывают их, делая приобретение синхронных реактивных двигателей выгодной инвестицией.
Синхронные реактивные двигатели перспективны во многих промышленных применениях
Конструктивное многообразие этих двигателей с высоким КПД почти неизвестно российским инженерам
Синхронный реактивный двигатель (СРД) или в английском варианте Synchronous reluctance motor (SynRM) был изобретен около ста лет назад, однако его серийное производство налажено совсем недавно. В чем причина — в сложности решения задачи управления СРД, или толчком ко второй волне интереса стал спрос на рост энергоэффективности, заставивший производителей осваивать новые и забытые типы электродвигателей? С этого вопроса начался наш разговор с экспертами Алексеем Захаровым и Павлом Мазуровым.
В чем причина — в сложности решения задачи управления СРД, или толчком ко второй волне интереса стал спрос на рост энергоэффективности, заставивший производителей осваивать новые и забытые типы электродвигателей? С этого вопроса начался наш разговор с экспертами Алексеем Захаровым и Павлом Мазуровым.
Синхронный реактивный мотор компании «Сименс»
Захаров А.В., к.т.н., ведущий специалист по математическому моделированию и расчетам, ПАО «НИПТИЭМ»
Повторное появление интереса к синхронно-реактивным двигателям обусловлено, с одной стороны, высокими и постоянно растущими требованиями по повышению КПД электрических машин, а с другой — снижением числа сложных технических применений, реализуемых на базе общепромышленных нерегулируемых электродвигателей.
Современные тенденции на рынке электродвигателей характеризуются снижением потребности в модификациях общепромышленных асинхронных электродвигателей (полюсно-переключаемых, с повышенными пусковыми характеристиками — повышенным скольжением и т.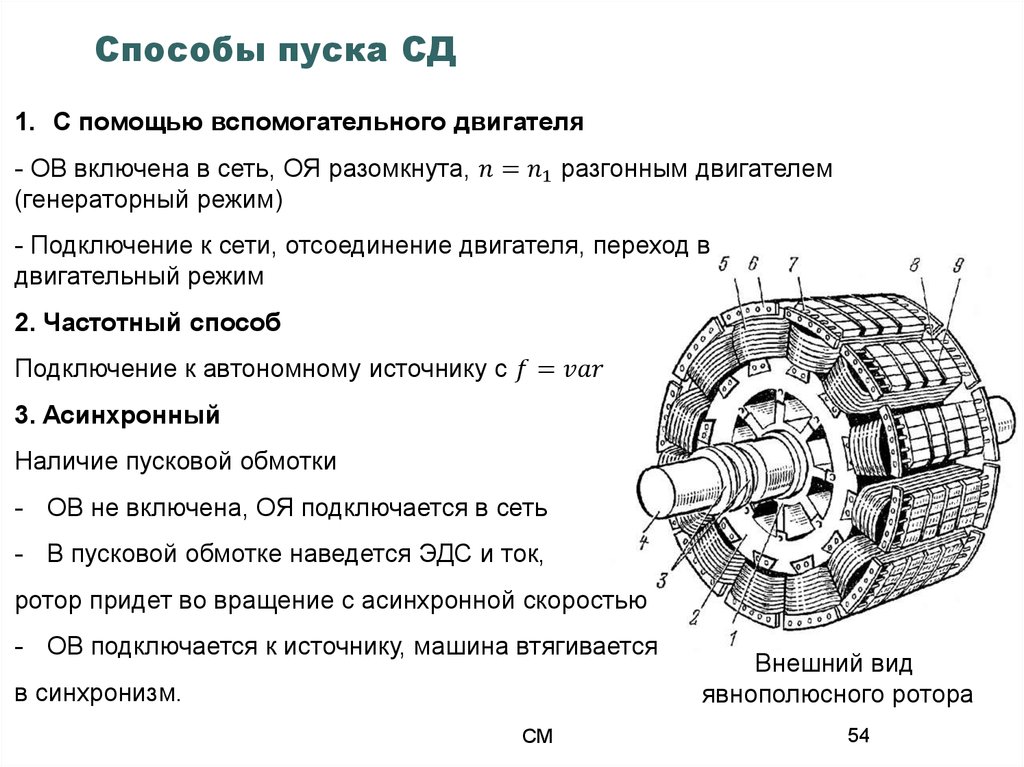 п.), обусловленной широким внедрением частотно-регулируемых электродвигателей. Это дало возможность разработчикам сосредоточиться на повышении КПД электродвигателей за счет снижения некоторых других характеристик машины, а также предложить электрические машины, ориентированные на использование только в частотно-регулируемом электроприводе, но обладающие высоким КПД, в том числе на машинах альтернативных конструкций. Проведенные исследования показали, что модификации синхронно-реактивных двигателей, имеющих короткозамкнутую обмотку на роторе, также могут быть применены при непосредственном питании от сети переменного тока в вентиляторных приложениях с невысокой инерцией сопряженного механизма.
п.), обусловленной широким внедрением частотно-регулируемых электродвигателей. Это дало возможность разработчикам сосредоточиться на повышении КПД электродвигателей за счет снижения некоторых других характеристик машины, а также предложить электрические машины, ориентированные на использование только в частотно-регулируемом электроприводе, но обладающие высоким КПД, в том числе на машинах альтернативных конструкций. Проведенные исследования показали, что модификации синхронно-реактивных двигателей, имеющих короткозамкнутую обмотку на роторе, также могут быть применены при непосредственном питании от сети переменного тока в вентиляторных приложениях с невысокой инерцией сопряженного механизма.
Мазуров П., технический консультант, департамент «Непрерывное производство и приводы», ООО «Сименс»
Как это часто бывает, развитие СРД вызвано сразу несколькими факторами. С одной стороны, технологии силовой электроники сейчас позволяют массово производить простые и дешевые частотные преобразователи, обладающие функциями управления, о которых нельзя было мечтать раньше.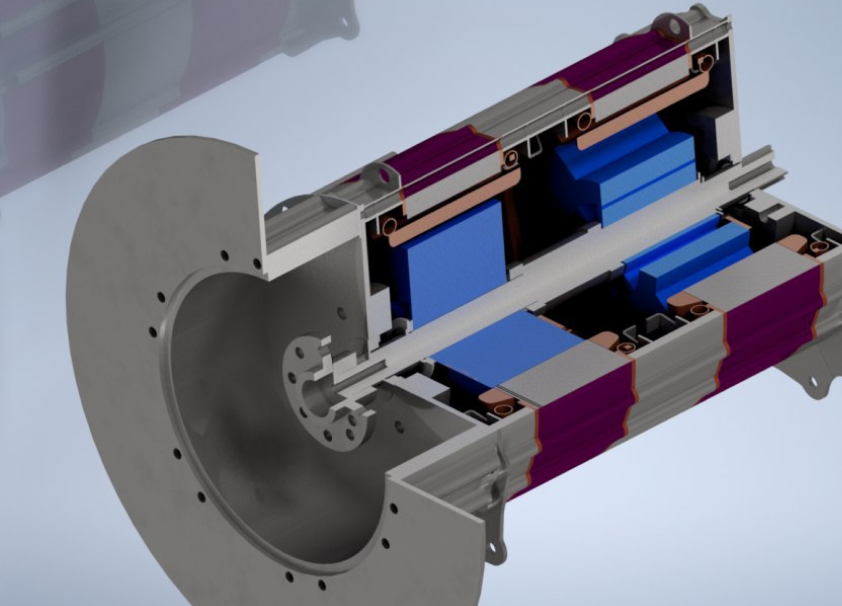 Благодаря этому исчезла проблема управления СРД, из-за которой эти машины не могли массово использовать десятки лет назад. С другой стороны, феноменальные значения эффективности дают по-новому взглянуть на синхронные реактивные двигатели, и европейские предприятия, стремящиеся любой ценой оптимизировать технологические процессы на своем производстве, действительно видят в приводах на основе СРД новые возможности. А ужесточение требований по энергоэффективности только подталкивает к этой оптимизации.
Благодаря этому исчезла проблема управления СРД, из-за которой эти машины не могли массово использовать десятки лет назад. С другой стороны, феноменальные значения эффективности дают по-новому взглянуть на синхронные реактивные двигатели, и европейские предприятия, стремящиеся любой ценой оптимизировать технологические процессы на своем производстве, действительно видят в приводах на основе СРД новые возможности. А ужесточение требований по энергоэффективности только подталкивает к этой оптимизации.
Синхронные реактивные двигатели характеризуются высокой энергоэфффективностью, компактностью, надежностью, отсутствием потерь в обмотке ротора, но имеют и серьезный недостаток – низкий коэффициент мощности. Для его преодоления рядом разработчиков предложен PMaSynRM – синхронно-реактивный двигатель с постоянными магнитами в сердечнике ротора. Создаете ли вы подобные машины и на каких типах магнитов? В чем плюсы и минусы PMaSynRM, особенно в сравнении с классическим СРД?
Павел Мазуров, «Сименс»
Главные преимущества классических СРД – очень высокие значения КПД, причем не только в номинальном режиме, но и при сильно пониженных скоростях, низкая инерционность благодаря отсутствию обмотки в роторе, а также высокий (по сравнению с классическим асинхронным двигателем) сервис-фактор из-за отсутствия электрических потерь в роторе. Основной минус при этом, если не считать низкий коэффициент мощности, – то, что СРД требует наличие преобразователя, который будет им управлять. Двигатели PMaSynRM призваны решить проблему невозможности работы без ЧРП, но одновременно оказывают негативное влияние на все три главных преимущества. Наличие магнитов в роторе снижает КПД, увеличивает инерционность, и понижает сервис-фактор. Компания Siemens в данный момент сосредоточилась на производстве классических синхронных реактивных двигателей, без постоянных магнитов в роторе. КПД наших СРД серии 1FP1 превышает значения уровня класса энергоэффективности IE4. А проблема низкого коэффициента мощности решается правильным подбором преобразователя частоты.
Основной минус при этом, если не считать низкий коэффициент мощности, – то, что СРД требует наличие преобразователя, который будет им управлять. Двигатели PMaSynRM призваны решить проблему невозможности работы без ЧРП, но одновременно оказывают негативное влияние на все три главных преимущества. Наличие магнитов в роторе снижает КПД, увеличивает инерционность, и понижает сервис-фактор. Компания Siemens в данный момент сосредоточилась на производстве классических синхронных реактивных двигателей, без постоянных магнитов в роторе. КПД наших СРД серии 1FP1 превышает значения уровня класса энергоэффективности IE4. А проблема низкого коэффициента мощности решается правильным подбором преобразователя частоты.
Алексей Захаров, «НИПТИЭМ»
НИПТИЭМ проводит исследования и разрабатывает синхронные двигатели с внутренними магнитами ротора, которые могут подходить под указанное вами название. Их достоинства — это высокие КПД и коэффициент мощности. Недостатки тоже есть: завышенное значение тока на холостом ходу при работе от сети с нерегулируемой амплитудой напряжения; опасность возникновения высокого напряжения на повышенных частотах вращения, в зоне работы с постоянством мощности, при ошибках управления преобразователя частоты; отсутствие возможности свободного вращения ротора без генерации напряжения, что в аварийных режимах (витковой, фазный пробои обмотки статора) может привести к опасности дальнейшего разрушения технического объекта в случае невозможности остановить вращение вала машины.
Целесообразна ли разунификация сердечника статора СРД с сердечником асинхронного двигателя? Если да, то в каком сегменте — повышенной мощности или повышенной энергоэффективности — у этого шага бóльшие перспективы?
Алексей Захаров, «НИПТИЭМ»
Считаем, что унификация радиальной геометрии сердечника статора для синхронных двигателей с возбуждением от постоянных магнитов (СДПМ) и СРД при разунификации с геометрией сердечников статора АЭД с КЗ с классами энергоэффективности IE1, IE2, IE3 имеет смысл, но экономически не оправдана.
В СРД можно выделить еще две градации – двигатели повышенной мощности и двигатели повышенной энергоэффективности. Какое из направлений вы считаете приоритетным?
Алексей Захаров, «НИПТИЭМ»
Направление машин повышенной мощности.
Встает ли вопрос целесообразности освоение производства АЭД мощностью до 100 кВт классов энергоэффективности выше IE3 при наличии энергоэффективных СРД?
Павел Мазуров, «Сименс»
Расчеты показывают, что приобретение двигателя классом энергоэффективности IE4 и частотного преобразователя к нему оказывается дороже, чем покупка СРД и соответствующего ЧРП той же мощности, если рассматривать мощности не более 45-55кВт. Поэтому, согласно нашему опыту рассмотрение двигателей класса IE4 целесообразно только в качестве нерегулируемого привода. Тогда как двигатели класса IE3 все ещё дешевле СРД той же мощности.
Поэтому, согласно нашему опыту рассмотрение двигателей класса IE4 целесообразно только в качестве нерегулируемого привода. Тогда как двигатели класса IE3 все ещё дешевле СРД той же мощности.
Алексей Захаров, «НИПТИЭМ»
Да, АЭД с КЗ имеют более широкие диапазоны работоспособности при изменении внешних условий работы.
Каковы показатели компактности СРД по сравнению с асинхронными двигателями с короткозамкнутым ротором?
Алексей Захаров, «НИПТИЭМ»
В СРД возможно получение равной мощности в меньшем на одну ступень габарите.
Павел Мазуров, «Сименс»
Серия синхронных реактивных двигателей 1FP1 была спроектирована таким образом, что присоединительные размеры полностью совпадают с аналогичными по мощности асинхронными двигателями. Причиной банальна – предприятия, модернизирующие свои приводные системы, не хотят сталкиваться с проблемами сильного несовпадения по размерам нового оборудования с заменяемым, поэтому было решено унифицировать по присоединительным размерам серии СРД и асинхронных двигателей.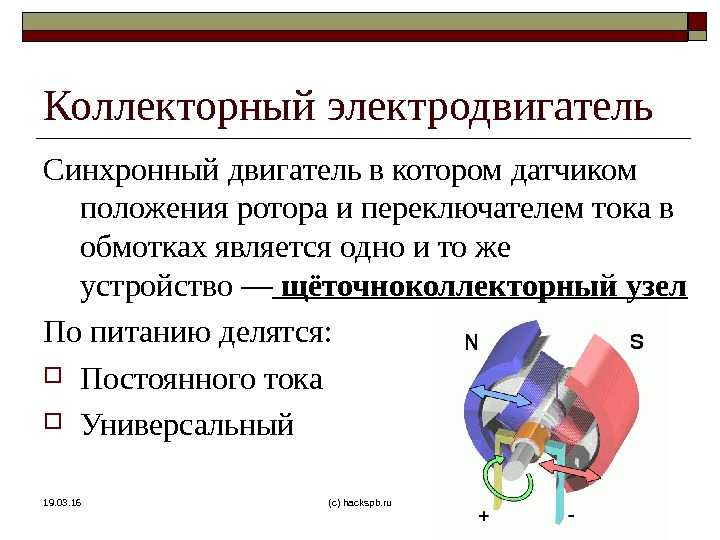
К типовым сферам применения СРД обычно относят устройства с вентиляторной механической характеристикой — насосы, вентиляторы, компрессоры. Встречаются упоминания о применении в запорной аппаратуре, намоточных устройствах, сервонасосах, экструдерах. Какие приложения включает в список применений СРД ваша компания, а какие нет?
Павел Мазуров, «Сименс»
Благодаря очень высоким значениям эффективности в широком диапазоне скоростей СРД особо интересны для использования в машинах, работающих в долговременном режиме. Это не только насосы и вентиляторы, но и конвейеры, и даже промышленное оборудование. Особенностью СРД Siemens является возможность работы с постоянным моментом в диапазоне регулирования 1:10 без принудительного охлаждения, что вкупе с высоким сервис-фактором и высокой динамикой очень на руку как раз-таки в конвейерных машинах. Поэтому Siemens рассматривает сферу применения СРД как максимально широкую. Преимущества СРД перед асинхронными двигателями классов IE3 и IE4 — не только в КПД, синхронные реактивные двигатели можно рассматривать практически в любом промышленном приложении с регулируемым электроприводом.
Сферы применения СРД «Сименс» |
Насосы, вентиляторы, компрессоры • Энергоэффективное решение для насосов, вентиляторов и компрессоров в непрерывном производстве и воднохозяйственном комплексе Конвейеры, транспортеры • Энергоэффектиное и динамичное решение для технологий перемещения и транспортировки груза Машиностроение • Решение для машиностроителей с простым управлением и точным регулированием скорости |
Алексей Захаров, «НИПТИЭМ»
Для частотно-регулируемого привода с СРД практически нет ограничений по применению в технических приложениях. Важным ограничением, пожалуй, является ограничение по максимальному и длительному значению развиваемого электромагнитного момента, имеющееся у электродвигателей любых типов.
Возможности СРД, получающих питание от сети переменного тока, имеют ограничения по применению. Однозначно можно рекомендовать использование таких электроприводов при вентиляторной механической характеристике нагрузки и низких значениях инерции сопряженного механизма.
Однозначно можно рекомендовать использование таких электроприводов при вентиляторной механической характеристике нагрузки и низких значениях инерции сопряженного механизма.
Существует точка зрения, что при решении задачи повышения энергоэффективности ряд компаний выбрал направление «синхронные двигатели с постоянными магнитами» (СДПМ), а другие сделали ставку на СРД? Связываете ли вы это с технологическими возможностями производства?
Алексей Захаров, «НИПТИЭМ»
Современное производство, отвечающее уровню развития постиндустриального общества, не может иметь сложностей при производстве как СДПМ, так и СРД.
Синхронный реактивный двигатель: решение для электромобилей без использования редкоземельных элементов
Исследовательская группа факультета промышленной и информационной инженерии и экономики Университета Л’Акуилы много лет работает в области проектирования, прототипирования и испытания инновационных двигателей для автомобильного применения. Недавно он участвовал в европейском проекте h3020-GV, направленном на то, чтобы помочь избежать использования редкоземельных магнитов за счет разработки следующего поколения электрических трансмиссий, обеспечивая промышленную осуществимость массового производства, уделяя особое внимание низкой стоимости производства. технологии.
Недавно он участвовал в европейском проекте h3020-GV, направленном на то, чтобы помочь избежать использования редкоземельных магнитов за счет разработки следующего поколения электрических трансмиссий, обеспечивая промышленную осуществимость массового производства, уделяя особое внимание низкой стоимости производства. технологии.
Воздействие двигателя внутреннего сгорания на окружающую среду привело к попыткам заменить его альтернативными силовыми установками, среди которых электродвигатель стал основным кандидатом. Рынок электромобилей находится на подъеме, и в ближайшие двадцать лет ожидается всплеск продаж электромобилей (EV), который должен превысить продажи традиционных автомобилей с ДВС, как показано на рис.1.
Новые технологии накопления энергии и силовые агрегаты играют решающую роль в развитии рынка электромобилей. На уровне двигателя ключевые компоненты и инновационные материалы должны быть интегрированы в текущие конструкции двигателей. Недавние достижения в области материалов, силовой электроники и систем управления способствовали созданию новых энергоэффективных и высокопроизводительных силовых агрегатов, использующих инновационные моторные технологии.
Требования к электродвигателям для электромобилей отличаются от обычных, используемых в промышленности. Наиболее сложными характеристиками являются уменьшенный размер и высокая эффективность в расширенном диапазоне скоростей. Для хорошей перегрузочной способности и широкого диапазона скоростей машина обычно имеет водяное охлаждение с водяной рубашкой вокруг сердечника статора.
Основные характеристики электродвигателя следующие:
1. высокая удельная мощность и удельный крутящий момент;
2. очень широкий диапазон скоростей;
3. высокая эффективность в широком диапазоне крутящего момента и скорости;
4. Широкие возможности работы при постоянной мощности;
5. высокая надежность и устойчивость к автомобильным условиям;
6. разумная стоимость.
Поскольку электромобиль работает в широком диапазоне крутящего момента и скорости в различных условиях вождения, конструкция двигателя должна быть направлена на достижение общей экономии энергии в течение ездового цикла транспортного средства (например, WLTP, NEDC, UDDS).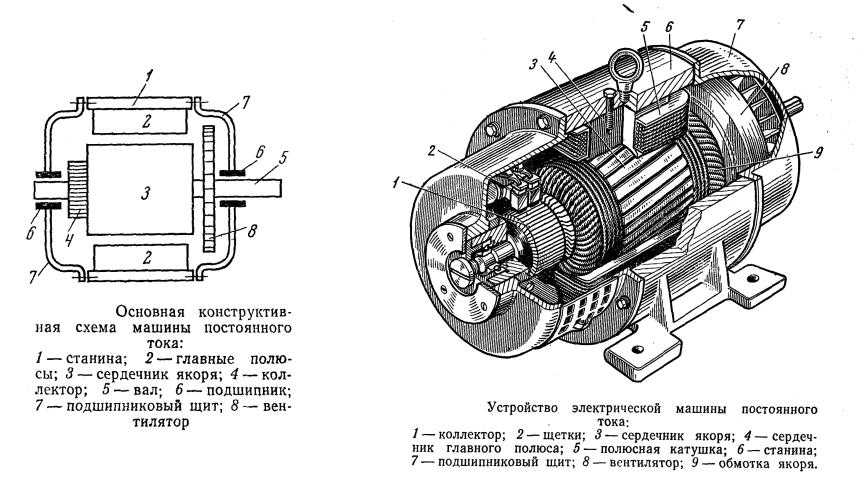 Существует много требований к разработке силовых установок с высокой удельной мощностью, высокой эффективностью и низкой стоимостью.
Существует много требований к разработке силовых установок с высокой удельной мощностью, высокой эффективностью и низкой стоимостью.
Исследования в этой области были интенсивными в последние несколько лет, и были изучены и предложены различные типы электрических машин. Подавляющее большинство решений для двигателей основаны на технологии постоянных магнитов с использованием редкоземельных магнитов. В таблице 1 представлены существующие электромобили на рынках Европы и США с указанием технологических решений для тяговых двигателей.
Синхронные двигатели с постоянными магнитами (PM) более привлекательны, и основными преимуществами являются их изначально высокий КПД, высокая удельная мощность и высокая надежность.
Двигатели с постоянными магнитами относительно просты в управлении и демонстрируют отличные рабочие характеристики с точки зрения управления максимальным крутящим моментом на ампер и оптимальной работой на увеличенной скорости. Различные типы машин с ПМ предлагаются в зависимости от положения ПМ в роторе и могут быть классифицированы как магниты с поверхностным или внутренним монтажом.
Различные типы машин с ПМ предлагаются в зависимости от положения ПМ в роторе и могут быть классифицированы как магниты с поверхностным или внутренним монтажом.
Высокая и неустойчивая стоимость сырья для магнитов ставит под сомнение их долгосрочную доступность, особенно с учетом того, что технология электромобилей будет производиться в массовом производстве. Кроме того, двигатели с постоянными магнитами имеют несколько технических недостатков, которые ограничивают характеристики двигателя, в частности эффект размагничивания, если температура двигателя превышает условия его эксплуатации. Поэтому все большее внимание уделяется альтернативным решениям, включающим машины без редкоземельных элементов (RE) или машины с уменьшенным количеством RE-PM.
Синхронный реактивный двигатель (SynRM) в последние годы вызывает большой интерес и представляет собой достойную альтернативу для электрических и гибридных транспортных средств благодаря своей простой и прочной конструкции. Основное преимущество SynRM заключается в отсутствии потерь в клетке ротора или потерь с постоянными магнитами, что позволяет поддерживать постоянный крутящий момент выше, чем крутящий момент асинхронного двигателя (АД) того же размера. Другими важными характеристиками являются:
Основное преимущество SynRM заключается в отсутствии потерь в клетке ротора или потерь с постоянными магнитами, что позволяет поддерживать постоянный крутящий момент выше, чем крутящий момент асинхронного двигателя (АД) того же размера. Другими важными характеристиками являются:
1. ротор потенциально дешевле, чем двигатели с постоянными магнитами и асинхронными двигателями;
2. удельный крутящий момент является приемлемым и не зависит от температуры ротора;
3. Алгоритм управления полем проще по сравнению с АД приводами.
мощностью 200 кВт Обычные двигатели SynRM известны меньшей удельной (пиковой) мощностью и удельным (пиковым) крутящим моментом (по сравнению с двигателями с постоянными магнитами), более высоким уровнем шума и меньшим коэффициентом мощности.
Несмотря на эти недостатки, можно получить двигатели с высокой плотностью крутящего момента и высоким КПД благодаря оптимизированной конструкции ротора.
Удельная мощность в SynRM увеличивается за счет увеличения рабочей скорости ротора и области ослабления потока. Тем не менее, оптимальная геометрия для характеристик двигателя должна быть усовершенствована, чтобы гарантировать механическую целостность ротора на высокой скорости.
Тем не менее, оптимальная геометрия для характеристик двигателя должна быть усовершенствована, чтобы гарантировать механическую целостность ротора на высокой скорости.
Исследовательская группа Департамента промышленной и информационной инженерии и экономики Университета Л’Акуила много лет работает в области проектирования, прототипирования и испытаний инновационных двигателей для автомобильной техники. Группа недавно приняла участие в европейском проекте h3020-GV под названием «RefreeDrive» — электронные приводы без редкоземельных элементов для недорогого производства.
Таблица 2: Требования SynRM для целевого приложения Этот проект направлен на то, чтобы помочь избежать использования редкоземельных магнитов путем разработки следующего поколения электрических трансмиссий, обеспечивая промышленную осуществимость массового производства, уделяя особое внимание низкой стоимости. технологий изготовления.
Целью исследования является изучение и разработка новых решений для силовых тяговых систем электромобилей на базе бесколлекторных электрических машин переменного тока без редкоземельных магнитов.
Благодаря разработке топологии электродвигателя в рамках проекта были достигнуты улучшенные характеристики с точки зрения удельной мощности, удельной мощности и эффективности по сравнению с текущим электромобилем, взятым в качестве эталона (Tesla Model S 60). Консорциум ReFreeDrive состоит из 13 партнеров в шести европейских странах, а команда Университета Л’Акуила взяла на себя разработку высокоскоростного синхронно-реактивного двигателя (пиковая мощность 200 кВт) для полностью электрического автомобиля премиум-класса. Цель состояла в том, чтобы спроектировать SynRM с жидкостным охлаждением, который мог бы удовлетворить предъявляемым требованиям, показанным в таблице 2.
Указанные выше направления требуют сложного процесса оптимизации для обеспечения требуемых характеристик двигателя при соблюдении целевой стоимости компонентов.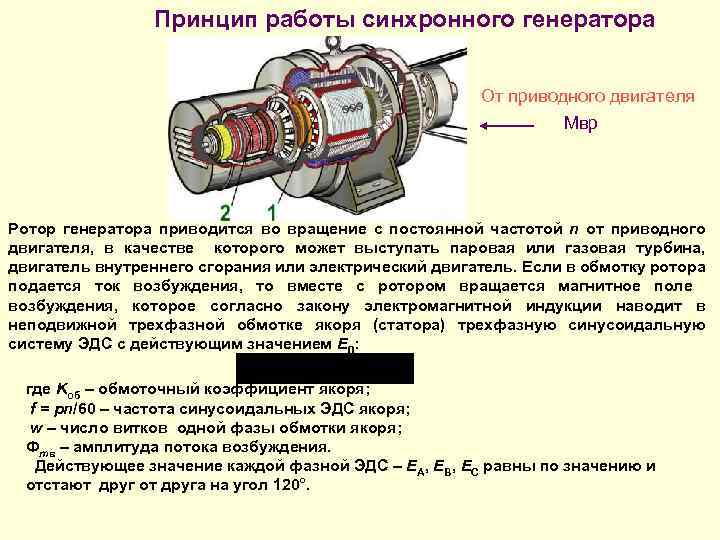 Для уточнения конструкции были использованы специальные процедуры определения размеров и алгоритмы оптимизации, а предлагаемое решение представляет собой инновационную конструкцию ротора с «жидкостными» барьерами и радиальными ребрами.
Для уточнения конструкции были использованы специальные процедуры определения размеров и алгоритмы оптимизации, а предлагаемое решение представляет собой инновационную конструкцию ротора с «жидкостными» барьерами и радиальными ребрами.
На рис. 2 показано поперечное сечение 6-полюсного SynRM. Ротор асимметричной формы имеет несколько «ребер», которые соединяют сегменты друг с другом в осевом и поперечном направлениях: эти соединения сохраняют достаточную механическую целостность в конструкции ротора при воздействии вращательных сил. применяются на высокой скорости.
Оптимальное расположение и оптимальная толщина ребер ротора были уточнены с помощью «оптимизатора топологии», связанного с механическим программным обеспечением конечных элементов; этот алгоритм позволил оптимизировать количество и расположение массы, необходимой механической части для выдерживания напряжения.
Основные характеристики двигателя при пиковой мощности и длительной мощности перечислены в таблице 3, а на рис. 3 представлена карта КПД в моторном режиме: пиковый КПД составляет около 96%, а максимальный крутящий момент составляет 383 Нм при пиковой мощности около 250 кВт при 6200 об/мин. При максимальной скорости (18000 об/мин) максимальная мощность составляет 56 кВт: эти характеристики полностью удовлетворяют требованиям, приведенным в таблице 2.
3 представлена карта КПД в моторном режиме: пиковый КПД составляет около 96%, а максимальный крутящий момент составляет 383 Нм при пиковой мощности около 250 кВт при 6200 об/мин. При максимальной скорости (18000 об/мин) максимальная мощность составляет 56 кВт: эти характеристики полностью удовлетворяют требованиям, приведенным в таблице 2.
4. Ротор SynRM (1 полюс): механическое напряжение при 18000 об/мин
Карта механических эквивалентных напряжений при максимальной скорости (18000 об/мин) представлена на рис. 4: результаты удовлетворительны и подтверждают, что конструкция ротора способна выдерживать механические нагрузки при высоких скоростях и удовлетворяет механическим ограничениям выбрали электротехническую сталь.
Машина меньшей мощности (пиковая мощность 75 кВт) была уменьшена по сравнению с конструкцией мощностью 200 кВт за счет изменения только обмотки статора и длины пакета, чтобы снизить производственные затраты.
Были реализованы два прототипа, и на рис. 5 показаны сердечники статора и ротора типоразмеров 75 и 200 кВт.
5 показаны сердечники статора и ротора типоразмеров 75 и 200 кВт.
Силовая электроника была разработана R13 Technology (дочерняя компания Университета Л’Акуила) для прямой интеграции с корпусом SynRM, использующим общую систему охлаждения двигателя.
Силовые агрегаты (75 и 200 кВт) будут испытаны в реальных условиях движения на испытательном стенде и демонстраторах автомобилей.
Марко Виллани, Университет Л’Акуилы, кафедра промышленной и информационной инженерии и экономики
ОБ АВТОРЕ
Марко Виллани, Университет Л’Акуила, кафедра промышленной и информационной инженерии и экономики Марко Виллани получил М.С. степень в области электротехники Университета Л’Акуила, Италия, в 1985. В 1993 году он стал доцентом кафедры силовых преобразователей, электрических машин и приводов. В 1990 году он был научным сотрудником в Дрезденском университете, Германия, а в 1995 году — в Университете Нагасаки, Нагасаки, Япония. В 1998 году он участвовал в двух проектах SAVE, касающихся «Повышения энергоэффективности трехфазных асинхронных двигателей» и «Барьеров против ремонта энергоэффективных двигателей». Он принимал участие в национальных исследовательских проектах и отвечал за несколько исследовательских контрактов между Университетом Л’Акуилы и промышленными партнерами. В настоящее время он является адъюнкт-профессором проектирования электрических машин на курсах магистратуры по электротехнике в Университете Л’Акуилы. Его исследовательские интересы сосредоточены на моделировании и проектировании электрических машин, высокоэффективных асинхронных двигателях, методах оптимизации проектирования электрических машин, анализе электродвигателей методом конечных элементов, проектировании синхронных двигателей с постоянными магнитами и реактивных двигателей для промышленных, автомобильных и аэрокосмических приложений. Он является автором более 160 технических статей в научных журналах и материалах конференций.
В 1998 году он участвовал в двух проектах SAVE, касающихся «Повышения энергоэффективности трехфазных асинхронных двигателей» и «Барьеров против ремонта энергоэффективных двигателей». Он принимал участие в национальных исследовательских проектах и отвечал за несколько исследовательских контрактов между Университетом Л’Акуилы и промышленными партнерами. В настоящее время он является адъюнкт-профессором проектирования электрических машин на курсах магистратуры по электротехнике в Университете Л’Акуилы. Его исследовательские интересы сосредоточены на моделировании и проектировании электрических машин, высокоэффективных асинхронных двигателях, методах оптимизации проектирования электрических машин, анализе электродвигателей методом конечных элементов, проектировании синхронных двигателей с постоянными магнитами и реактивных двигателей для промышленных, автомобильных и аэрокосмических приложений. Он является автором более 160 технических статей в научных журналах и материалах конференций.
Синхронный реактивный двигатель
Дмитрий Левкин
- Строительство
- Принцип работы
- Характеристики
Статор индукторного двигателя может быть с распределенной и с сосредоточенной обмоткой и состоит из корпуса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного двигателя с распределенной обмоткой
Различают три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-ламинированный ротор и поперечно-ламинированный ротор.
Ротор с выступающими полюсами
Ротор аксиально-слоистый
Ротор поперечно-слоистый
Переменный ток, проходящий через обмотки статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнитопроводящую ось (ось d) с приложенным полем, чтобы минимизировать магнитное сопротивление (магнитное сопротивление) в магнитной цепи. Амплитуда крутящего момента прямо пропорциональна разнице между прямой L д и квадратурные индуктивности L q . Следовательно, чем больше разница, тем больше создаваемый крутящий момент.
Линии магнитного поля синхронного реактивного двигателя
Основная идея может быть объяснена с помощью рисунка ниже. Объект «а», состоящий из анизотропного материала, имеет различную проводимость вдоль оси d и оси q, а изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, приложенное к анизотропному объекту «а», создает крутящий момент, если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «а» не совпадает с линиями магнитного поля, то объект будет вносить искажения в магнитное поле. В этом случае направление искаженных магнитных линий будет совпадать с осью q объекта.
Объект «а», состоящий из анизотропного материала, имеет различную проводимость вдоль оси d и оси q, а изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, приложенное к анизотропному объекту «а», создает крутящий момент, если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «а» не совпадает с линиями магнитного поля, то объект будет вносить искажения в магнитное поле. В этом случае направление искаженных магнитных линий будет совпадать с осью q объекта.
Объект с анизотропной геометрией (а) и изотропной геометрией (б) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном двигателе магнитное поле создается синусоидально распределенной обмоткой статора . Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет момент, направленный на снижение потенциальной энергии всей системы за счет уменьшения искажения поля по оси q (δ→0). Если угол δ поддерживать постоянным, например, за счет управления магнитным полем, то электромагнитная энергия будет непрерывно преобразовываться в механическую энергию.
Если угол δ поддерживать постоянным, например, за счет управления магнитным полем, то электромагнитная энергия будет непрерывно преобразовываться в механическую энергию.
Ток статора отвечает за намагничивание и создание крутящего момента, который пытается уменьшить искажение поля. Крутящий момент управляется путем управления текущим углом, то есть углом между текущим вектором обмотки статора и осью d ротора во вращающейся системе координат.
- Преимущества:
- Простая и прочная конструкция ротора: :
ротор имеет простую конструкцию, состоящую из листовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкотемпературный :
так как в роторе отсутствуют токи, он не нагревается при работе, что увеличивает срок службы электродвигателя. - Без магнитов :
окончательная цена электродвигателя снижена, так как в производстве не используются редкоземельные металлы. При отсутствии магнитных сил обслуживание электродвигателя упрощается. - Низкий момент инерции ротора: :
так как на роторе нет обмотки и магнитов, момент инерции ротора ниже, что позволяет электродвигателю быстрее разгоняться и экономить энергию. - Регулятор скорости :
Ввиду того, что синхронный реактивный двигатель для своей работы требует преобразователя частоты, возможно регулирование скорости вращения реактивного двигателя в широком диапазоне скоростей.

- Недостатки:
- Управление частотой :
для работы требуется частотно-регулируемый привод. - Низкий коэффициент мощности :
из-за того, что магнитный поток создается только реактивным током. Решается применением частотно-регулируемого привода с коррекцией мощности.
- ГОСТ 27471-87 Машины электрические вращающиеся. Понятия и определения.
Ссылки
Читайте также
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Крутящий момент двигателя
- Мощность двигателя
- Эффективность преобразования энергии
- Номинальная скорость
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
Бездатчиковый ВОК ПМСМ
Бездатчиковое векторное управление синхронными двигателями с постоянными магнитами.
