
устройство, принцип работы, режимы работы, пуск
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
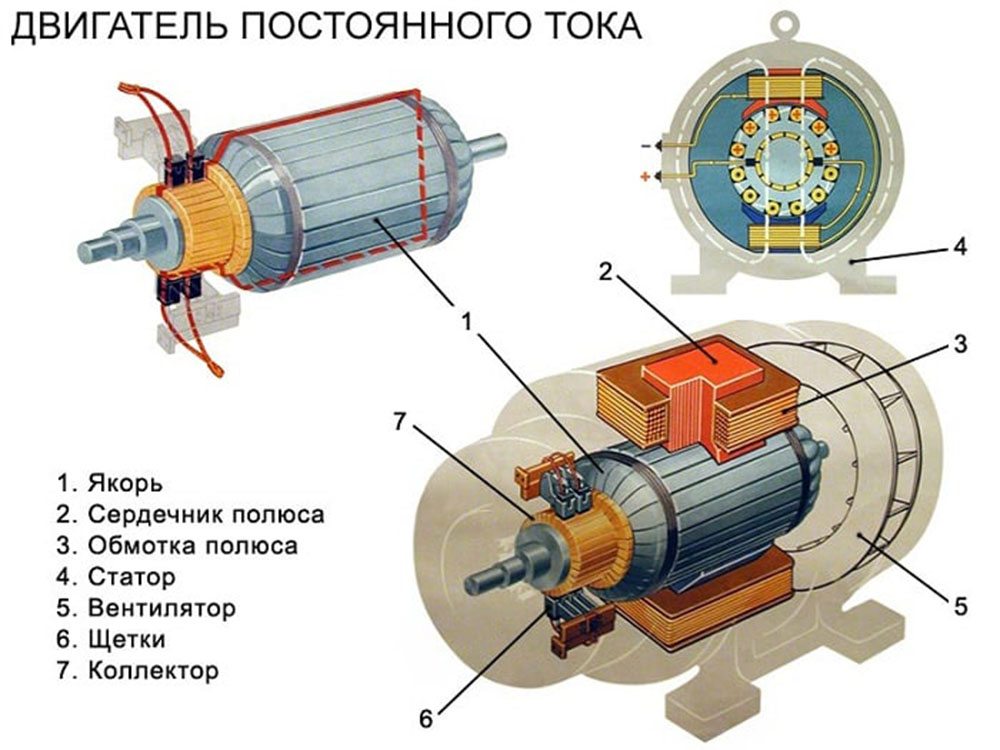
1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы. - Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.Принцип работы
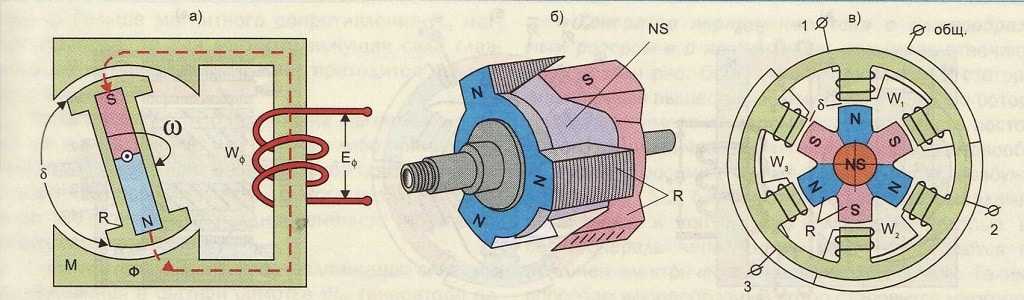
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.

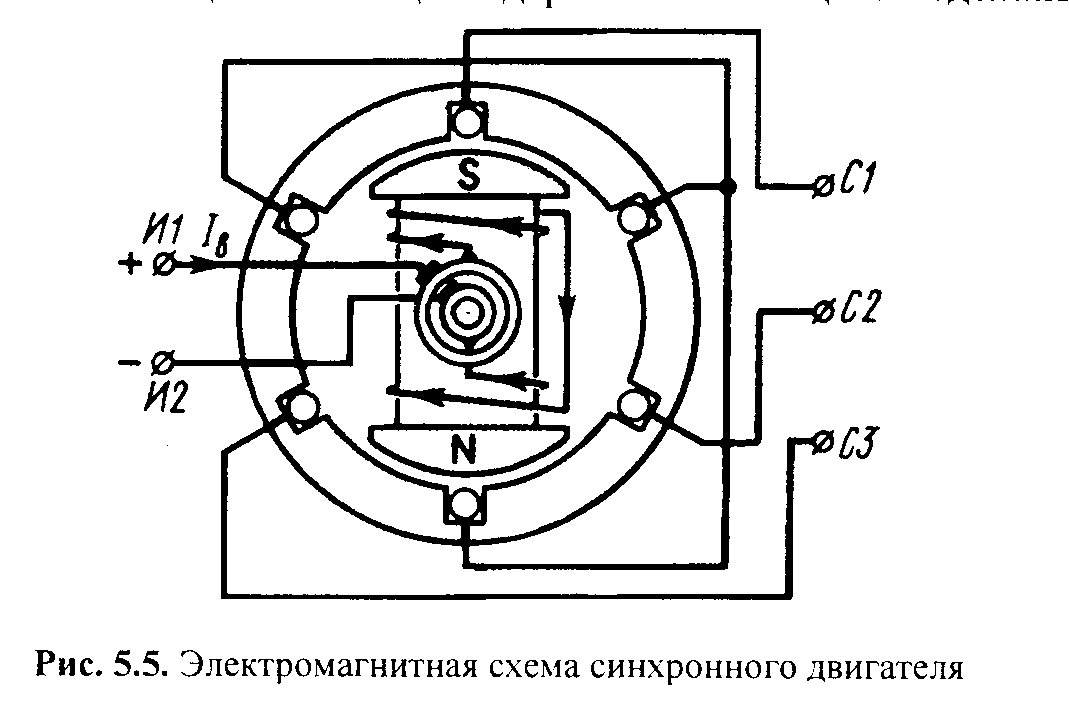
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
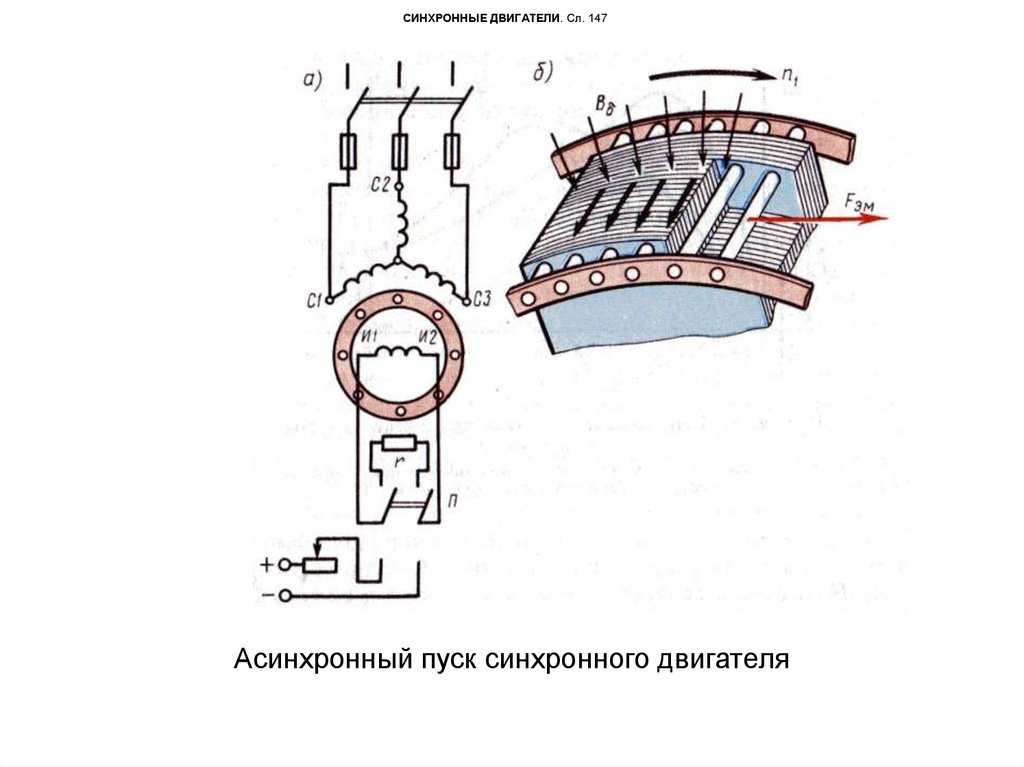
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение.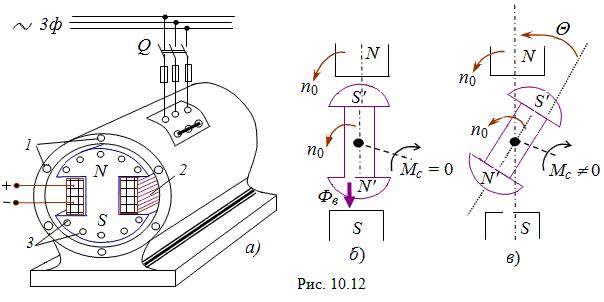 У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач.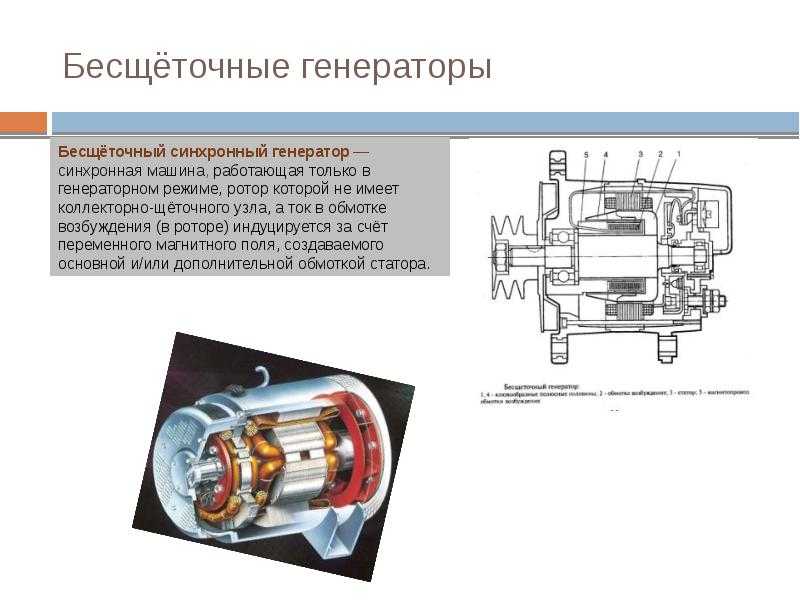 Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см.
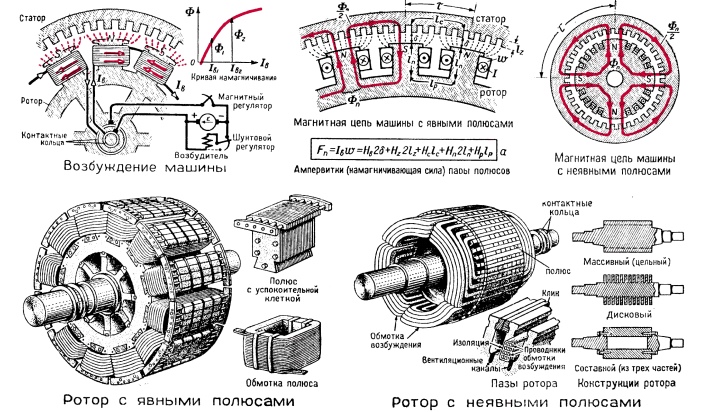 рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Механическая и угловая характеристика
В силу особенностей, присущих синхронному двигателю, значение его момента не зависит от оборотов вращения. Это свойство привода определяет его назначение и сферу применения. Технические качества приводного оборудования для конфигурирования электропривода оцениваются зависимостью частоты вращения мотора от электромагнитного момента, развиваемого им. Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Качество механических характеристик оценивается жесткостью. Относительно этого параметра все характеристики делятся на идеально жесткие, жесткие и мягкие. В связи с тем, что частота вращения ротора синхронного двигателя под нагрузкой не меняется, этот тип электромоторов обладает идеально жесткой характеристикой, что выражается формулой:
n = 60*f1/p,
где f1
– частота тока статора;
p –
число пар полюсов статорной обмотки.
Но зависимость n = f (M)
не отражает полного поведения мотора, в котором при увеличении нагрузки происходит смещение осей поля индуктора и якоря. Каждой нагрузке соответствует определенный угол между их осями. Уравнение угловой характеристики:
Mэм = Mmax*sin θ
Это формула, выражает приблизительную зависимость момента на валу от угла вылета ротора. В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Рабочий процесс
Синхронный двигатель это электротехническое устройство, работающее на основе закона электромагнитной индукции. Принцип работы и устройство СД предусмотрены из условия практического применения этого физического явления. Магнитное поле создается трехфазной обмоткой, размещенной в пазах статорного пакета аналогично цепи асинхронной машины. На роторе размещена обмотка возбуждения, питаемая постоянным током. Питание к ней подводится через щетки и кольца. Постоянный ток, протекающий по возбуждающей обмотке, взаимодействует с вращающимся полем индуктора, что вызывает круговое движение вала. Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.
После запуска синхронный двигатель переменного тока вращается одновременно с магнитным потоком. СД не может запускаться с помощью только питающей сети. Это объясняется инерционностью роторного блока и высокой скоростью вращающегося поля. Схема включения маломощной машины предусматривает использование пусковых (демпферных) обмоток, с которыми она работает как синхронный двигатель с короткозамкнутым ротором (то есть реализуется асинхронный пуск). В случае мощных электроприводов пуск производится вспомогательным электромотором или преобразователем частоты.
Наибольшее распространение получил асинхронный пуск, предусматривающий устройство дополнительной КЗ-обмотки. В этом случае синхронный двигатель с короткозамкнутым ротором запускается аналогично асинхронному эл/двигателю. Вследствие таких действий роторный механизм разгоняется до скорости вращающегося магнитного потока. Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.
Устройство и принцип действия синхронного двигателя предусматривают эксплуатацию привода с постоянной скоростью, которая не зависит от нагрузки. СД не рассчитан на нагрузку, величина которой превышает пусковую мощность между роторным механизмом и магнитным потоком. В противном случае синхронизм прерывается, и работа синхронного двигателя останавливается.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. a b c Готтлиб, Ирвинг М. (1997). Практическое руководство по электродвигателю, 2-е изд . США: Ньюнес. С. 73–76. ISBN 978-0-7506-3638-4.
a b c Готтлиб, Ирвинг М. (1997). Практическое руководство по электродвигателю, 2-е изд . США: Ньюнес. С. 73–76. ISBN 978-0-7506-3638-4.
, Newnes, стр. 19/8, ISBN 978-0-7506-4637-6
. Архивировано из оригинального 29 июня 2013 года . Дата обращения 10 мая 2016 .
Ки-Чан Ким; Сеунг-Бин Лим; Дэ-Хён Ку; Джу Ли. Конструкция формы постоянного магнита для синхронного двигателя с постоянным магнитом с учетом частичного размагничивания » . Magnetics, IEEE Transactions on. 2006. doi : 10.1109 / TMAG.
 2006.879077
2006.879077Y. Honda; Т. Накамура; Т. Хигаки; Ю. Такеда. «Соображения по конструкции двигателя и результаты испытаний синхронного двигателя с внутренним постоянным магнитом для электромобилей» . Конференция по отраслевым приложениям, 1997. Тридцать второе ежегодное собрание IAS, IAS ’97., Протокол конференции IEEE 1997 года. 1997. DOI : 10,1109 / IAS.1997.643011
М.А. Рахман; Пинг Чжоу. «Анализ бесщеточных синхронных двигателей с постоянными магнитами» . Промышленная электроника, транзакции IEEE on.
 1996. doi : 10.1109 / 41.491349
1996. doi : 10.1109 / 41.491349.
34
(11): 1755–1763. DOI : 10.1016 / j.energy.2009.04.022 .
. С. 1–6. DOI : 10,1109 / PEDES.2012.6484405 . ISBN 978-1-4673-4508-8. S2CID 25556839 . Проверено 23 сентября 2020 .
.
31
(3): 2417–2428. DOI : 10.1109 / TPEL.2015.2437893 . S2CID 19377123 . Проверено 23 сентября 2022 .
 a b Никбахт, Масуд; Лиаси, Саханд Гасеминеджад; Аббасзаде, Карим; Маркаде, Голамреза Араб (09.09.2020). Усовершенствованная стратегия прогнозирующего управления моделью для управления PMSM с уменьшением пульсаций крутящего момента и магнитного потока . Публикация конференции IEEE
a b Никбахт, Масуд; Лиаси, Саханд Гасеминеджад; Аббасзаде, Карим; Маркаде, Голамреза Араб (09.09.2020). Усовершенствованная стратегия прогнозирующего управления моделью для управления PMSM с уменьшением пульсаций крутящего момента и магнитного потока . Публикация конференции IEEE. С. 1–6. DOI : 10,1109 / PEDSTC49159.2020.9088489 . ISBN 978-1-7281-5849-5. S2CID 218564540 . Проверено 23 сентября 2020 .
. С. 30–35. DOI : 10.1109 / ISIE.2007.4374567 . ISBN 978-1-4244-0754-5. S2CID 35896251 . Проверено 23 сентября 2020 .
электродвигатели
и их применение
, стр. 104, Springer, 1994 ISBN 0-306-44698-7
. Проверено 2 июля 2022 .
 a b Стандарт IEEE 141-1993 Рекомендуемая практика для распределения электроэнергии на промышленных предприятиях
a b Стандарт IEEE 141-1993 Рекомендуемая практика для распределения электроэнергии на промышленных предприятияхстр. 227-230
, стр. 192, CRC Press, 2007 ISBN 0-8493-4034-9 .
.
51
(3): 2676–2682. DOI : 10.1109 / tia.2014.2373820 . ISSN 0093-9994 .
, стр. 32, IEE, 1988 ISBN 0-86341-114-2 .
.
25
(6): 1012–1018. DOI : 10.1109 / 28.44236 . ISSN 0093-9994 .
↑ Schaefer, RC (1999). «Управление возбуждением синхронного двигателя».
 а б Дубей Г. К. Основы электроприводов
а б Дубей Г. К. Основы электроприводов. Нароса, издательство ченнаи. п. 254.
(второе изд.). Новый век интернэшнл. п. 25.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Содержание
- 1 Тип 1.1 Невозбужденные двигатели 1.1.1 Реактивные двигатели
- 1.1.2 Гистерезисные двигатели
- 1.1.3 Двигатели с постоянными магнитами
 2 Двигатели с возбуждением постоянным током
2 Двигатели с возбуждением постоянным током- 3.1 Примеры
- 7.1 Использование в качестве синхронного конденсатора
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.

Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Принцип действия и устройство синхронного двигателя: преимущества, конструктивные особенности
Принцип действия синхронного двигателя выглядит практически так же, как и асинхронного. Однако у этого типа силовых установок имеются существенные отличия и особенности. И хоть доля асинхронных агрегатов в промышленности составляет 96% от общего количества электродвигателей, другие варианты, включая синхронный, тоже нашли своих потребителей.
- Основные отличия
- Конструкция синхронного устройства
- Принцип работы
- Устройство генераторов
- Запуск установки
- Сферы применения
Основные отличия
В основном синхронные и асинхронные двигатели мало чем отличаются друг от друга. Ключевым отличием первых моделей является то, что вращение якоря осуществляется с такой же скоростью, как и вращение магнитного потока. При этом внутри установки встроена проволочная обмотка, передающая переменное напряжение, а не короткозамкнутый ротор, как у асинхронных устройств. Также отдельные конструкции оборудованы постоянными магнитами, но они существенно повышают стоимость двигателя.
При увеличении нагрузки скорость вращения ротора остается прежней. Именно такая особенность характеризует эту разновидность силовых установок. Ключевое требование к таким машинам выглядит следующим образом: количество полюсов у движущегося магнитного поля должно соответствовать числу полюсов электромагнита на роторе.
Конструкция синхронного устройства
Принцип работы и устройство синхронных машин остаются понятными даже для неопытных потребителей. К ключевым составляющим системы относят следующие узлы:
- Статор — представляет собой неподвижную часть установки, на которой расположено три обмотки. Они соединены по схеме «звезда» или «треугольник». В качестве материала для изготовления статора используются пластины из суперпрочной электротехнической стали.
- Ротор — подвижный элемент двигателя, оснащенный обмоткой. Во время работы установки эта обмотка пропускает определенное напряжение.
 Они соединены по схеме «звезда» или «треугольник». В качестве материала для изготовления статора используются пластины из суперпрочной электротехнической стали.
Они соединены по схеме «звезда» или «треугольник». В качестве материала для изготовления статора используются пластины из суперпрочной электротехнической стали.Между зафиксированной и подвижной частью системы находится небольшая воздушная прослойка, гарантирующая сбалансированную работу мотора и беспрепятственное воздействие магнитного поля на ключевые составляющие агрегата. Также в двигателе установлены подшипники, необходимые для вращения ротора, и клеммная коробка. Последняя находится в верхней части механизма.
Принцип работы
Изучая принцип работы синхронного двигателя, важно понимать, что, как и остальные разновидности силовых установок, они преобразуют один тип энергии в другой. Простыми словами, встроенные механизмы делают из электрической энергии механическую,
- Сквозь обмотку на статоре пропускается переменное напряжение, в результате чего происходит образование магнитного поля.
- Затем аналогичное напряжение подается на роторные обмотки, что тоже создает магнитное поле. При наличии в конструкции постоянных магнитов такое поле имеется по умолчанию.
- При столкновении двух магнитных полей происходит их противодействие друг другу, т. е. одно толкает другое. Именно такой принцип вызывает передвижение ротора, помещенного на подшипники.
Зная, как устроен и работает синхронный двигатель, остается правильно распределить его энергию и использовать в нужных целях. Однако производительность и КПД системы будут максимальными только в том случае, если удастся вывести ее в нормальный режим работы.
Устройство генераторов
Существует обратный вариант синхронных двигателей — синхронные генераторы. Они работают немного иначе:
- Обмотка неподвижного статора не пропускает напряжение. Наоборот, с нее оно снимается.
- Сквозь роторную обмотку подается переменное напряжение, при этом расход электрической энергии совсем небольшой.
- Движение генератора обусловлено дизельным или бензиновым двигателем. Также его может раскручивать сила воды или ветра.
- В статорной обмотке происходит индукция ЭДС, а на концах появляется разность потенциала. Это объясняется движущимся магнитным полем вокруг ротора.

Но в любом случае необходимо осуществить стабилизацию напряжения на выходе генератора. Это делается соединением роторной обмотки с источником напряжения.
В зависимости от конструктивных особенностей ротор может быть оборудован постоянными или электрическими магнитами или так называемыми полюсами. Что касается индукторов, то в синхронных установках они бывают:
- Явнополюсными.
- Неявнополюсными.
Отличаются эти типы друг от друга только взаимным расположением полюсов. Чтобы снизить сопротивление магнитного поля и улучшить проникновение тока, механизм оснащают сердечниками, которые выполнены из ферромагнетиков.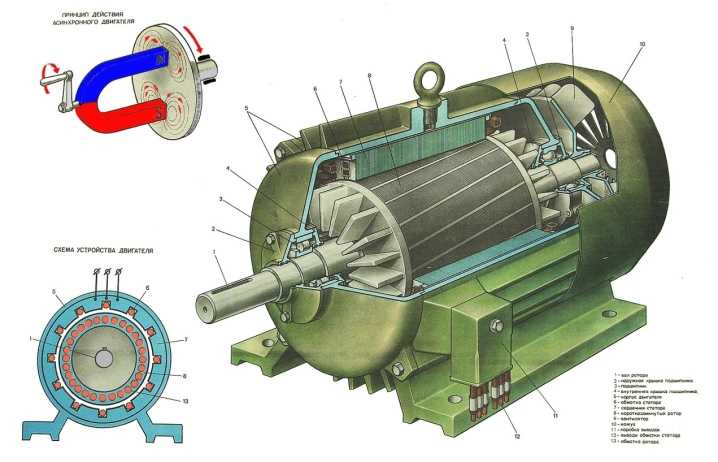
Запуск установки
При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
С момента появления на рынке работа синхронных агрегатов обеспечивалась специальным асинхронником, который механически соединялся с остальными узлами. По сути, ротор разгонялся до нужной частоты с помощью второго типа моторов. Современные асинхронники не нуждаются в подключении дополнительных механизмов, и все, что требуется для их работы, — соответствующее напряжение для статорной обмотки.
Как только система обеспечит нужную скорость вращения, разгонный двигатель будет отключен. При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
Сферы применения
Синхронный электродвигатель представляет собой важное изобретение для различных направлений промышленности. Но из-за сложной конструкции и высокой стоимости оборудования его используют в редких случаях.
Сферы применения электрических моторов синхронного типа очень ограничены. В большинстве случаев установку применяют для повышения показателей мощности в энергосистеме, что обусловлено их способностью функционировать при любых коэффициентах мощности и отличной экономичностью.
Устройства востребованы для тех условий, где скорость вращения едва достигает 500 оборотов в минуту и появляется необходимость поднять мощность. В настоящее время их активно внедряют в поршневые насосы, компрессорные установки, прокатные станки и другие системы.
Конструкция, работа, типы и применение
Электрическая машина — это общий термин, используемый для обозначения электромагнитного устройства, используемого для преобразования электрической энергии в механическую. Его можно использовать как генератор для выработки электрической энергии или как двигатель для выработки энергии механизма. Синхронный двигатель — это тип двигателя, который используется в промышленности из-за его постоянной скорости.
Электродвигатель
Электродвигатель — это машина, преобразующая электрическую энергию в механическую. Он состоит из статора (неподвижной части) и ротора (подвижной части). Когда подается электрическая энергия, ротор вращается, вырабатывая вращательную механическую энергию. Он работает полностью противоположно генератору.
Когда подается электрическая энергия, ротор вращается, вырабатывая вращательную механическую энергию. Он работает полностью противоположно генератору.
Электрические двигатели можно разделить на двигатели переменного и постоянного тока. В то время как двигатели переменного тока далее классифицируются на асинхронные двигатели и синхронные двигатели.
Похожие сообщения:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Содержание
Что такое синхронный двигатель? Синхронный двигатель — это двигатель переменного тока, ротор которого вращается с той же скоростью, что и вращающееся магнитное поле. Магнитное поле статора вращается со скоростью, которая зависит от частоты питания, известной как синхронная скорость. Отсюда и название синхронный двигатель.
Когда два синхронных генератора работают параллельно, и первичный двигатель одного генератора остановлен. Генератор все еще будет работать, получая питание от линии генератора. Генератор подает полученную мощность из сети на свои потери. Когда к нему подключена механическая нагрузка, машина будет работать с постоянной скоростью. Когда машина работает и работает так, как указано выше, она называется синхронным двигателем.
В отличие от асинхронного двигателя, синхронный двигатель не зависит от индуктивного тока ротора. Ротор имеет либо постоянные магниты, либо обмотки возбуждения, которые питаются от внешнего источника. В асинхронном двигателе обмотки статора генерируют вращающееся магнитное поле (RMF), которое также индуцирует ток в роторе. В синхронном двигателе статор генерирует только RMF. Магнитное поле ротора магнитно сцепляется с вращающимся RMF и вращается с той же скоростью, известной как синхронная скорость.
Нажмите на изображение, чтобы увеличить
Полезно знать: Синхронный двигатель — это такая же машина, как генератор переменного тока или синхронный генератор. Например, синхронный двигатель может работать как синхронный генератор (генератор переменного тока) без изменения номинала и конструкции. т. е.
- Когда машина преобразует входную электрическую мощность в выходную механическую мощность, она называется синхронным двигателем.
- Когда одна и та же машина преобразует входную механическую энергию в выходную электрическую, она называется синхронным генератором (альтернатором).
Синхронный двигатель конструктивно аналогичен генератору переменного тока. Он работает с постоянной скоростью, называемой синхронной скоростью, N S . Это зависит от частоты питания и количества полюсов ротора. Синхронная скорость определяется как
N S = 120 f ÷ p
Где
- N S = синхронная скорость (об/мин)
- f = Частота тока питания
- p = количество полюсов
Количество полюсов зависит от конструкции двигателя и не может быть изменено во время работы. Следовательно, скорость синхронного двигателя зависит только от частоты сети.
Следовательно, скорость синхронного двигателя зависит только от частоты сети.
Похожие сообщения:
- Электрический трансформатор – конструкция, работа, типы и применение
- Генератор или синхронный генератор: конструкция, работа, типы и применение
Конструкция синхронного двигателя аналогична генератору переменного тока или синхронному генератору. он отличается от асинхронного или асинхронного двигателя конструкцией ротора.
Синхронный двигатель состоит из двух основных частей
- Статор
- Ротор
Статор является неподвижной частью двигателя. Как и в асинхронном двигателе, сердечник статора изготовлен из тонких ламинированных листов стали или чугуна с хорошими магнитными свойствами для уменьшения гистерезиса и потерь на вихревые токи.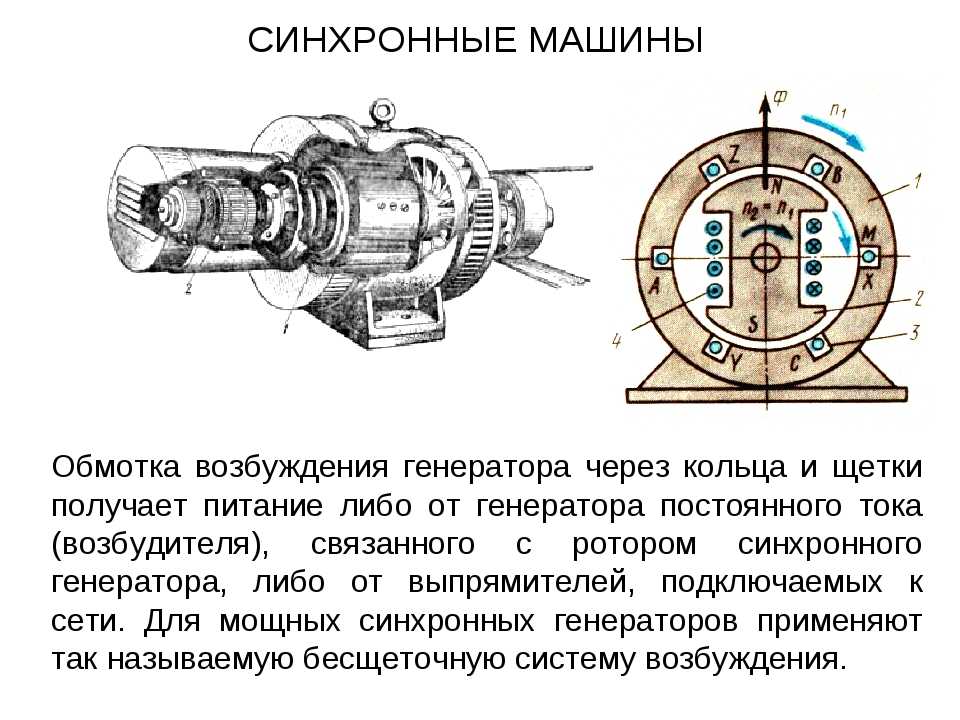 Сердечник имеет осевые пазы для удержания трехфазной обмотки возбуждения переменного статора, называемой обмоткой якоря.
Сердечник имеет осевые пазы для удержания трехфазной обмотки возбуждения переменного статора, называемой обмоткой якоря.
На обмотку якоря статора подается 3-фазное питание через его входную клемму. Он отвечает за генерацию вращающегося магнитного поля (RMF).
РоторРотор является вращающейся частью синхронного двигателя. Он имеет цилиндрическую форму и содержит обмотку возбуждения. Он отвечает за генерацию магнитного поля или полюсов. Он питается от токосъемных колец и щеточного узла от источника постоянного тока. Обычно для возбуждения используется небольшой генератор постоянного тока, соединенный с его валом.
Related Posts
- Уравнение крутящего момента асинхронного двигателя
- Потери в асинхронном двигателе – силовые каскады асинхронного двигателя
Ротор синхронного двигателя может быть выполнен одним из следующих способов.
Термин «явновыпуклый» означает «направленный наружу». Явнополюсный ротор имеет выступающие или выступающие полюса по направлению к обмотке якоря. Сердечник ротора изготовлен из многослойного стального листа для уменьшения гистерезиса и вихревых токов. Обмотки возбуждения намотаны вокруг каждого полюса.
Явнополюсный ротор имеет большое количество полюсов. Он не подходит для работы на высоких скоростях из-за больших потерь на ветер (при высокой скорости). Используется в низко- и среднескоростных синхронных двигателях. Физически он имеет большой диаметр и небольшую осевую длину.
Токосъемные кольца и щетки в сборе используются для обеспечения электрического соединения между неподвижной цепью и вращающейся частью машины. Он используется для питания обмотки возбуждения от источника постоянного тока.
Неявнополюсный или цилиндрический ротор Этот тип ротора имеет ротор цилиндрической формы, изготовленный из многослойной стали. Сердечник имеет пазы для обмоток возбуждения, которые фиксируются с помощью клиньев от вытягивания. При этом непрорезанная часть сердечника становится магнитными полюсами.
Сердечник имеет пазы для обмоток возбуждения, которые фиксируются с помощью клиньев от вытягивания. При этом непрорезанная часть сердечника становится магнитными полюсами.
Имеет меньшее количество полюсов, меньший диаметр и большую осевую длину. Это дороже, чем явнополюсный ротор. Однако конструкция ротора способствует равномерному распределению потока, механической прочности, надежности и т. д. Поэтому такие синхронные двигатели используются для высоких скоростей.
Ротор с постоянными магнитамиВ современных синхронных двигателях используется ротор с постоянными магнитами, на поверхности которого установлены постоянные магниты. Обмоток возбуждения нет. Эти магниты создают необходимое поле без источника возбуждения. Постоянный магнит изготовлен из неодима, бора и железа, поскольку они легко доступны и экономичны. Такой ротор не имеет токосъемного кольца или щеточного узла.
Недостатком ротора с постоянными магнитами является то, что двигатель не запускается самостоятельно из-за инерции ротора, он не может следовать быстро вращающемуся RMF сразу при запуске. Поэтому для его работы необходим VFD (преобразователь частоты).
Поэтому для его работы необходим VFD (преобразователь частоты).
Похожие сообщения:
- Почему мощность двигателя указывается в кВт, а не в кВА?
- Что такое КПД двигателя и как его повысить?
Синхронный двигатель работает по принципу магнитной блокировки между RMF статора (вращающееся магнитное поле) и магнитным полем ротора. Как известно, противоположные полюса притягиваются друг к другу, поэтому полюса RMF притягивают противоположные полюса ротора, создавая вращательное движение.
Синхронный двигатель представляет собой машину с двойным возбуждением, т. е. для достижения синхронизма требуется питание переменным и постоянным током как для статора, так и для ротора. Трехфазный переменный ток подается на обмотки статора для создания RMF. Статор рассчитан на то же количество полюсов, что и ротор. Эти полюса вращаются со скоростью, синхронизированной с входной частотой f, которая называется синхронной скоростью. Он определяется как
Он определяется как
N S = 120 f / p
Питание постоянным током подается на обмотки ротора для создания постоянного магнитного поля. Поскольку источник постоянного тока обеспечивает постоянный ток, магнитное поле ротора не меняется. Магнитные полюса генерируются на противоположных концах ротора. Полюса ротора взаимодействуют с ЭДС статора и вращаются с той же скоростью, с которой он достигает синхронной скорости.
Если ротор вращается с той же скоростью, что и RMF статора, момент нагрузки отсутствует. Полюса ротора и статора совпадают друг с другом. Если приложена механическая нагрузка, ротор начинает колебаться вокруг своего нового положения равновесия, это явление известно как « охота за ». Ротор отстает на несколько градусов от RMF статора и начинает развивать крутящий момент. По мере увеличения нагрузки угол между ними увеличивается до тех пор, пока поле ротора не отстанет от RMF на 90°. В этот момент двигатель обеспечивает максимально доступный крутящий момент, называемый пробивной момент . Если нагрузка превышает этот предел, двигатель глохнет.
Если нагрузка превышает этот предел, двигатель глохнет.
Похожие сообщения:
- Эквивалентная схема асинхронного двигателя
- Характеристики момента-скольжения и момента-скорости асинхронного двигателя
- Синхронный двигатель по своей природе не является самозапускающимся. Ротор необходимо любыми средствами довести до синхронной скорости, чтобы синхронизироваться с частотой сети.
- Скорость зависит только от частоты входного питания. ЧРП используется для управления скоростью синхронного двигателя.
- Скорость не зависит от нагрузки. Поэтому на синхронный двигатель не влияют никакие изменения нагрузки.
- Увеличение нагрузки увеличивает крутящий момент. Синхронный двигатель остановится, если крутящий момент превысит предельный крутящий момент.
- Синхронный двигатель либо работает с синхронной скоростью, либо не работает вообще.
- Синхронный двигатель может работать как с опережающим, так и с отстающим коэффициентом мощности. Поэтому они используются для улучшения коэффициента мощности в промышленности.

Синхронный двигатель по своей природе не является самозапускающимся из-за инерции ротора. При подаче питания статор RMF мгновенно начинает вращаться с синхронной скоростью. Однако ротор не успевает. Для обеспечения необходимой скорости вращения ротора для синхронизации используются следующие способы.
Демпферная обмотка Демпферная обмотка используется в явнополюсном роторе. Это короткозамкнутая обмотка, как в асинхронном двигателе. RMF индуцирует ток в этой обмотке и создает собственное магнитное поле, которое взаимодействует с RMF и создает необходимый пусковой момент. Когда ротор достигает скорости, близкой к синхронной, возбуждение постоянного тока подается на обмотку возбуждения ротора, и двигатель синхронизируется.
В этом методе двигатель первоначально запускается как асинхронный с использованием демпфирующей обмотки. Эта обмотка также помогает гасить колебания из-за резких изменений нагрузки.
Метод пони-двигателяПони-двигатель — это небольшой асинхронный двигатель или шунтирующий двигатель постоянного тока, соединенный с валом синхронного двигателя. Это помогает в обеспечении необходимого пускового момента. Возбуждение постоянным током не применяется до тех пор, пока ротор не достигнет скорости, близкой к синхронной скорости. Ротор магнитно блокируется с помощью RMF, и подача питания на пони-мотор отключается.
Метод переменной частоты ЧРП или частотно-регулируемый привод — это устройство, которое обеспечивает питание с регулируемой частотой. Как известно, синхронная скорость зависит от частоты питания. Изначально частота установлена на минимум, чтобы уменьшить синхронную скорость. Скорость постепенно увеличивается до желаемого значения или нормальной скорости.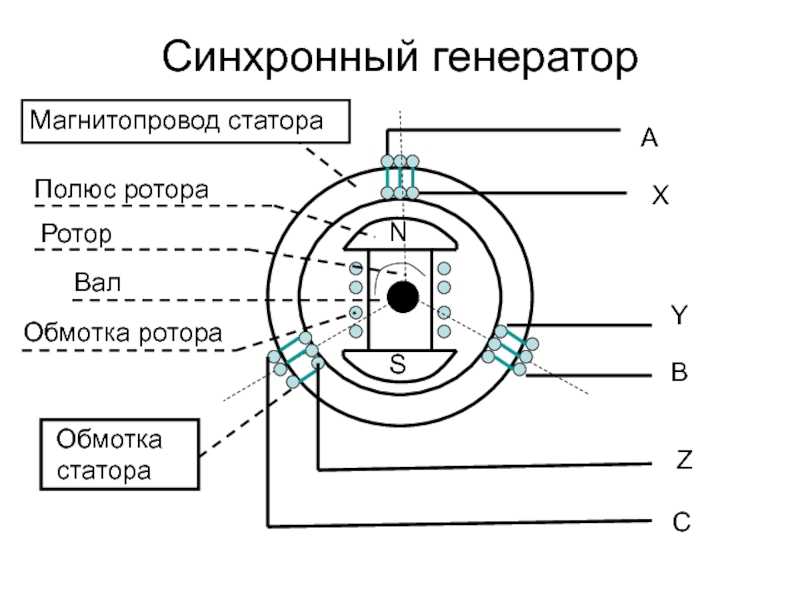
Related Posts:
- Типы электродвигателей – Классификация двигателей переменного, постоянного тока и специальных двигателей
- Применение электродвигателей
Синхронные двигатели в основном подразделяются на две категории в зависимости от намагниченности ротора.
Двигатель постоянного тока с возбуждениемВ таком синхронном двигателе источник постоянного тока используется для возбуждения его ротора через контактное кольцо. Ротор включает в себя обмотку возбуждения, которая намагничена для создания постоянного магнитного поля, взаимодействующего со статором RMF.
Двигатель без возбуждения Ротор такого синхронного двигателя не требует внешнего возбуждения для создания магнитного поля. Вместо этого он сделан из материала, который генерирует собственное поле, например, в постоянном магните или с помощью поля статора. Кобальтовая сталь обычно используется из-за ее высокой сохраняемости (материал, сохраняющий магнитные свойства).
Кобальтовая сталь обычно используется из-за ее высокой сохраняемости (материал, сохраняющий магнитные свойства).
Электродвигатели без возбуждения могут быть дополнительно классифицированы по типам
- Синхронные электродвигатели с постоянными магнитами
- Синхронный двигатель с гистерезисом
- Реактивный синхронный двигатель
Как следует из названия, ротор состоит из постоянного магнита, который создает постоянное магнитное поле. Обмоток, контактных колец и щеток нет. Поле ротора замыкается на RMF статора и вращается с синхронной скоростью. Так как они не самозапускающиеся и в роторе нет обмоток, требуется ЧРП для обеспечения плавного увеличения пусковой скорости.
Синхронный двигатель с гистерезисом Ротор такого синхронного двигателя изготовлен из материала с высокими потерями на гистерезис, такого как хром и кобальтовая сталь. Это самозапускающийся однофазный двигатель, работающий на синхронной скорости. Он имеет две обмотки статора, то есть «основную обмотку» и «вспомогательную обмотку», для создания RMF статора. Цилиндрический ротор начинает вращаться за счет наведенного вихревого тока, таким образом, он запускается подобно асинхронному двигателю. Как только он достигает скорости, близкой к синхронной, RMF статора блокирует ротор в синхронизме.
Это самозапускающийся однофазный двигатель, работающий на синхронной скорости. Он имеет две обмотки статора, то есть «основную обмотку» и «вспомогательную обмотку», для создания RMF статора. Цилиндрический ротор начинает вращаться за счет наведенного вихревого тока, таким образом, он запускается подобно асинхронному двигателю. Как только он достигает скорости, близкой к синхронной, RMF статора блокирует ротор в синхронизме.
Такой синхронный двигатель работает по принципу реактивного сопротивления. Под влиянием магнитного поля ферромагнитный материал будет двигаться, замыкая магнитную цепь там, где сопротивление минимально. Линии магнитного поля следуют по пути с низким сопротивлением, точно так же, как ток следует по пути с низким сопротивлением.
Таким образом, ротор с короткозамкнутым ротором используется с некоторыми удаленными зубьями, чтобы сформировать выступающий полюс, а также путь с меньшим сопротивлением. Статор подобен гистерезисному двигателю, имеющему основную и вспомогательную обмотки для создания RMF. При запуске ротор пытается выровняться с RMF и начинает вращаться в его направлении. Но из-за инерции ротора RMF проходит положение выравнивания и повторяет попытку во время следующего оборота. Таким образом, скорость постепенно увеличивается и в конечном итоге достигает синхронной скорости и магнитно блокируется с RMF.
Статор подобен гистерезисному двигателю, имеющему основную и вспомогательную обмотки для создания RMF. При запуске ротор пытается выровняться с RMF и начинает вращаться в его направлении. Но из-за инерции ротора RMF проходит положение выравнивания и повторяет попытку во время следующего оборота. Таким образом, скорость постепенно увеличивается и в конечном итоге достигает синхронной скорости и магнитно блокируется с RMF.
Related Posts:
- Уравнение мощности, напряжения и ЭДС двигателя постоянного тока
- Формулы и уравнения в области электротехники и электроники
Преимущества
Вот некоторые преимущества синхронного двигателя при любом изменении нагрузки.
 Таким образом, это делает его полезным для улучшения коэффициента мощности.
Таким образом, это делает его полезным для улучшения коэффициента мощности.Недостатки
Вот некоторые недостатки синхронного двигателя
- Синхронные двигатели по своей природе не запускаются самостоятельно и требуют других средств для обеспечения почти синхронной пусковой скорости.
- Он останавливается, если нагрузка превышает допустимый предел.
- Требуется внешний источник постоянного тока для возбуждения поля ротора
- Его скорость не может быть изменена, если преобразователь частоты VFD не используется для очень его частоты питания.
- В синхронном двигателе происходит колебание при внезапном приложении нагрузки.
- Требует частого обслуживания из-за токосъемных колец и щеток.
- Синхронные двигатели, как правило, сложнее и дороже, чем асинхронные двигатели.

Вот несколько вариантов применения синхронного двигателя.
Применение с постоянной скоростью: Они обычно используются в приложениях с постоянной скоростью, когда скорость не изменяется при увеличении нагрузки. Тем не менее, VFD можно использовать для регулировки скорости в соответствии с требованиями.
Коррекция коэффициента мощности: Путем изменения возбуждения синхронного двигателя можно изменять коэффициент мощности электрической цепи. Такой синхронный двигатель, который специально используется для улучшения коэффициента мощности, называется синхронным конденсатором.
Преобразователь частоты: Синхронный двигатель используется для питания генератора переменного тока или синхронного генератора с другой частотой. Такой синхронный двигатель известен как преобразователь частоты.
Регулирование напряжения: Синхронный двигатель может действовать как переменный конденсатор или индуктор, изменяя его возбуждение. Он используется для регулирования напряжения путем управления реактивной мощностью в длинной линии электропередачи.
Он используется для регулирования напряжения путем управления реактивной мощностью в длинной линии электропередачи.
Очень низкоскоростные приложения: Синхронный двигатель с очень низкой частотой может использоваться для очень низкоскоростных приложений с высоким КПД.
Позиционирование: Благодаря постоянной скорости они используются для точного позиционирования в робототехнике, как и серводвигатели.
Общие области применения: Синхронные двигатели широко используются там, где требуется постоянная скорость. Кроме того, такие двигатели используются в дробилках, пульподробилках, камнедробилках, шаровых мельницах, сталелитейных заводах, металлопрокатных заводах, цементных заводах, резиновых и текстильных заводах, центробежных насосах, воздушных компрессорах, вентиляторах, воздуходувках, линейных валах, токарных станках. столы, таймеры, часы, соковыжималки, магнитофоны и проигрыватели, смесители, сигнализаторы, фонографы, указатели, регулирующие и управляющие устройства.
Related Posts:
- Пускатель двигателя – типы пускателей и методы пуска двигателя
- Пускатель прямого действия — схема подключения пускателя DOL для двигателей
- Расчет размера кабеля для двигателей LT и HT
- Управление скоростью двигателя постоянного тока – методы управления напряжением, реостатным потоком и потоком
- Машина постоянного тока – конструкция, работа, типы и применение Серводвигатель
- – типы, конструкция, работа, управление и применение
- Бесщеточный двигатель постоянного тока (BLDC) – конструкция, принцип работы и применение Шаговый двигатель
- — типы, конструкция, работа и применение
- Асинхронный двигатель и линейные асинхронные двигатели Формулы и уравнения
- Что такое мотор-генератор и как он работает?
- Как запустить трехфазный асинхронный двигатель от однофазного источника питания?
- Символы электродвигателей
Принцип работы синхронного двигателя и его конструкция
Введение
Мы узнали о различных типах электродвигателей в нашей предыдущей статье.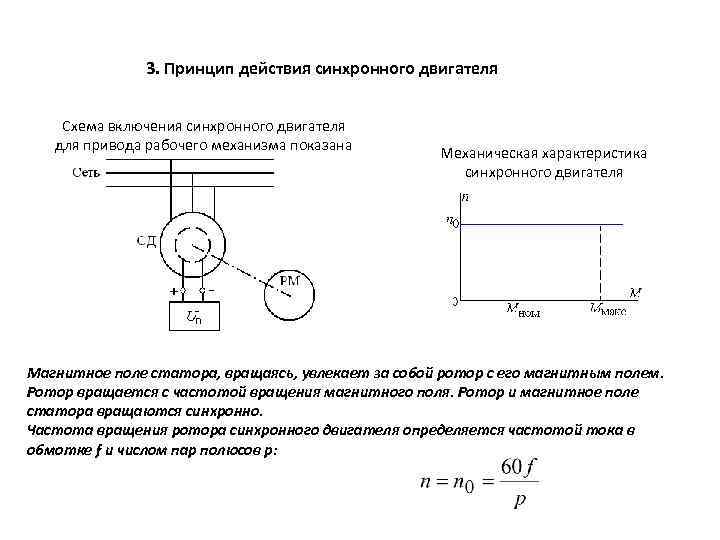 Теперь начнем знакомиться с этими моторами по отдельности. В этой статье мы рассмотрим теорию работы синхронного двигателя и его работу.
Теперь начнем знакомиться с этими моторами по отдельности. В этой статье мы рассмотрим теорию работы синхронного двигателя и его работу.
Основной принцип одинаков для всех двигателей. Именно взаимная индукция между обмотками статора и ротора обеспечивает работу любого двигателя. Также, когда 3-фазная обмотка питается от 3-фазного источника питания, создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.
Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса статора и ротора. Что касается рисунка, статор имеет два полюса Ns и Ss. Эти полюса под напряжением создают вращающееся магнитное поле, которое можно предположить, что сами полюса вращаются по кругу. Они вращаются с синхронной скоростью и примем направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, мы все знаем, что «Как столбы отталкиваются» . Итак, северный полюс статора отталкивает северный полюс ротора.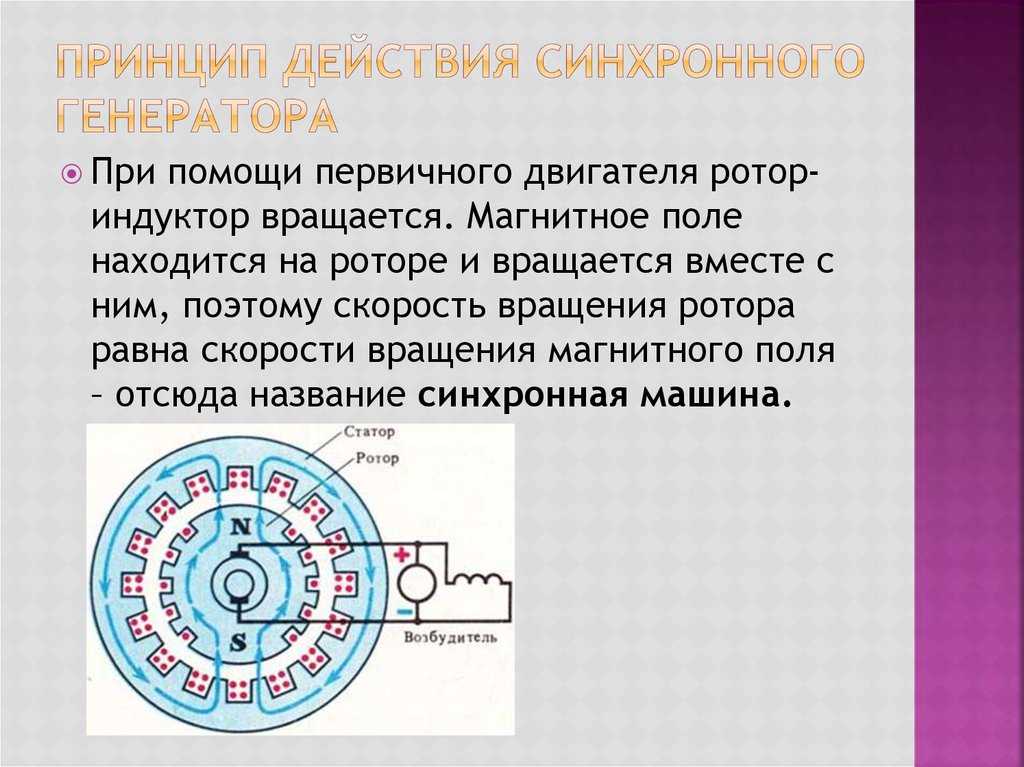 Также южный полюс статора отталкивает южный полюс ротора. Это заставляет ротор вращаться в направлении против часовой стрелки, таким образом, через полпериода полюса статора меняются местами, тем самым заставляя их выровняться с «непохожими полюсами», которые притягиваются друг к другу . т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно блокируются.
Также южный полюс статора отталкивает южный полюс ротора. Это заставляет ротор вращаться в направлении против часовой стрелки, таким образом, через полпериода полюса статора меняются местами, тем самым заставляя их выровняться с «непохожими полюсами», которые притягиваются друг к другу . т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно блокируются.
В этом положении полюса Ns притягивают S, а полюса Ss притягивают N. Эти противоположные противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает меняться с высокой скоростью и реверсированием, полюса ротора также вращаются и реверсируются так же, как и статор, заставляя ротор вращаться с постоянной синхронной скоростью и в том же направлении.
Принцип работы
Когда двигатель питается от сети переменного тока. питания, полюса статора находятся под напряжением. Это, в свою очередь, притягивает (противоположные) полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с той же синхронной скоростью, что и полюса статора. Синхронная скорость вращения определяется выражением Ns=120f/P.
питания, полюса статора находятся под напряжением. Это, в свою очередь, притягивает (противоположные) полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с той же синхронной скоростью, что и полюса статора. Синхронная скорость вращения определяется выражением Ns=120f/P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, даже если он работает с той же скоростью, имеет тенденцию постепенно отставать по фазе на некоторый угол «β», называемый углом нагрузки или углом сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как крутящий момент, развиваемый двигателем, зависит от угла нагрузки «β».
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива «А» и «В». Предполагается, что шкив «А» и шкив «В» закреплены на одном и том же валу.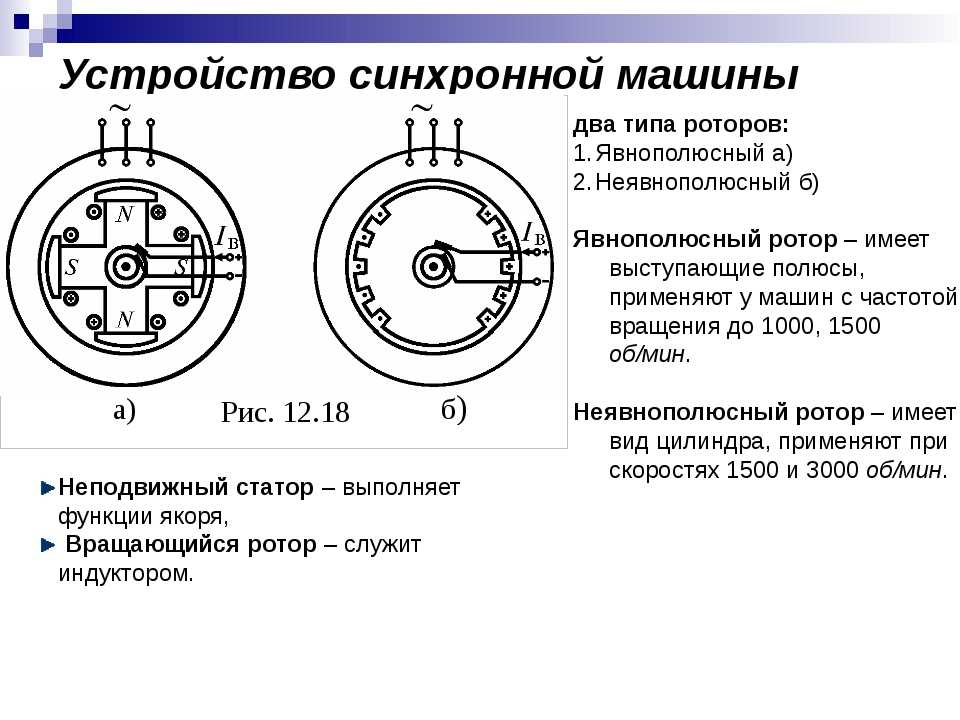 Шкив «А» передает мощность от привода через вал, в свою очередь заставляя вращаться шкив «В», тем самым передавая мощность на нагрузку.
Шкив «А» передает мощность от привода через вал, в свою очередь заставляя вращаться шкив «В», тем самым передавая мощность на нагрузку.
Два шкива, соединенных шпонкой с одним и тем же валом, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «В» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, скручивание вала можно сравнить с падением ротора по фазе со статором.
Угол поворота можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол скручивания увеличиваются, таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «В» увеличивается до такой степени, что вызывает скручивание и поломку вала, то передача мощности через вал прекращается, так как вал ломается. Это можно сравнить с выходом ротора из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо на синхронной скорости, либо останавливаться.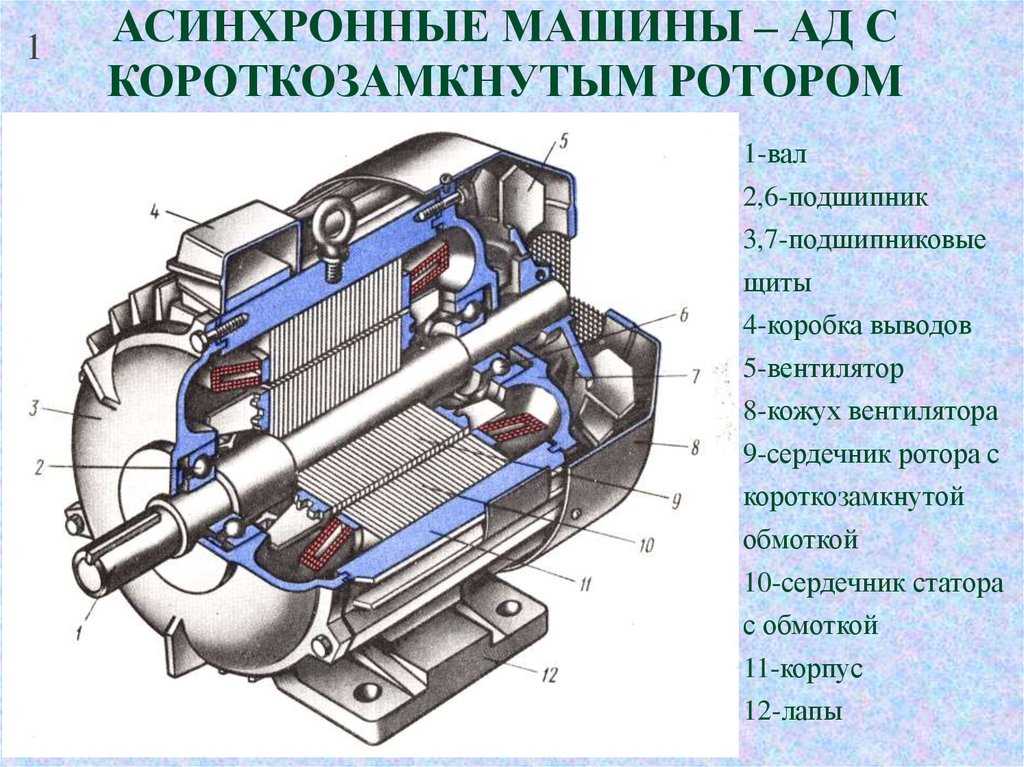
Процедура запуска
Все синхронные двигатели оснащены «беличьей клеткой», состоящей из медных стержней, короткозамкнутых с обоих концов. Эти обмотки также служат для самозапуска синхронного двигателя. Во время пуска они легко запускаются и действуют как асинхронные двигатели. Для запуска синхронного двигателя линейное напряжение подается на клеммы статора, а клеммы возбуждения (ротор) остаются невозбужденными. Он запускается как асинхронный двигатель и при достижении скорости около 95% от его синхронной скорости, на ротор подается слабое возбуждение постоянного тока, что заставляет ротор выравниваться синхронно со статором (в этот момент полюса статора и ротора сцепляются друг с другом и, следовательно, приводят двигатель в синхронизм).
Колебание/помпаж/качание фазы
Колебание или скачок фазы синхронного двигателя вызвано либо
- Переменной нагрузкой
- Пульсация частоты питания
Когда синхронный двигатель (например, компрессор нагружен) , насосы, ножницы и т.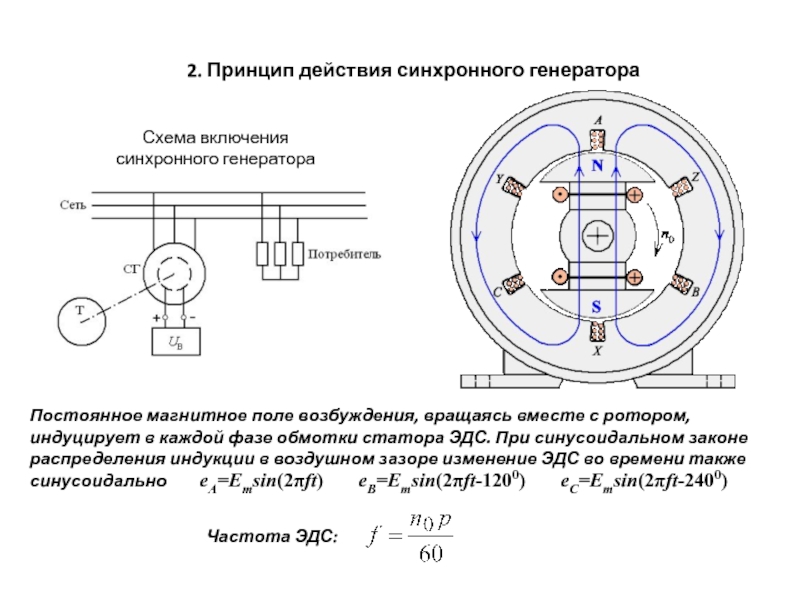 д.), по мере увеличения нагрузки его ротор отклоняется назад на угол сцепления «β». При дальнейшем увеличении нагрузки этот угол «β» еще больше увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор выходит за пределы допустимого, а затем оттягивается назад, чтобы соответствовать новой нагрузке на двигатель.Таким образом, ротор начинает колебаться, как маятник, вокруг своего нового положения, соответствующего новой нагрузке, пытаясь восстановить равновесие либриум. Если период этих колебаний совпадает с собственной частотой машины, то возникает резонанс, который может вывести машину из синхронизма. Для гашения таких колебаний используются «демпферы» или «демпфирующие сетки», известные как «беличья клетка».
д.), по мере увеличения нагрузки его ротор отклоняется назад на угол сцепления «β». При дальнейшем увеличении нагрузки этот угол «β» еще больше увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор выходит за пределы допустимого, а затем оттягивается назад, чтобы соответствовать новой нагрузке на двигатель.Таким образом, ротор начинает колебаться, как маятник, вокруг своего нового положения, соответствующего новой нагрузке, пытаясь восстановить равновесие либриум. Если период этих колебаний совпадает с собственной частотой машины, то возникает резонанс, который может вывести машину из синхронизма. Для гашения таких колебаний используются «демпферы» или «демпфирующие сетки», известные как «беличья клетка».
Сравнение асинхронных и синхронных двигателей:
Применение синхронных двигателей:
- Эти двигатели используются в качестве первичных двигателей (приводов) для центробежных насосов, поршневых компрессоров с ременным приводом, воздуходувок, бумажных фабрик, резиновых заводов. и т. д., из-за их высокой эффективности и высоких скоростей (об/мин выше 600).
- Низкоскоростные синхронные двигатели (с частотой вращения менее 600 об/мин) широко используются для привода многих поршневых насосов, таких как винтовые и шестеренные насосы, вакуумные насосы, измельчители, металлопрокатные станы, машины для прокатки алюминиевой фольги и т. д.
- Эти двигатели также широко используются на кораблях. Навигационное оборудование корабля, такое как гирокомпас, использует особый тип синхронного двигателя. Они также используются в качестве первичных двигателей для Visco-Therm или вискозиметра, устройства для измерения/регулирования вязкости жидкого топлива главного двигателя.
- Большинство заводов и производств используют бесконечное количество индуктивных нагрузок. Они могут варьироваться от ламповых ламп до мощных асинхронных двигателей. Таким образом, эти индуктивные нагрузки имеют сильно отстающий коэффициент мощности. Синхронный двигатель с перевозбуждением (синхронный конденсатор), имеющий опережающий коэффициент мощности, используется для улучшения коэффициента мощности этих систем питания.
 и т. д., из-за их высокой эффективности и высоких скоростей (об/мин выше 600).
и т. д., из-за их высокой эффективности и высоких скоростей (об/мин выше 600).