
Законы Ньютона — Википедия
Зако́ны Нью́то́на — три важнейших закона классической механики, которые позволяют записать уравнения движения для любой механической системы, если известны силы, действующие на составляющие её тела. Впервые в полной мере сформулированы Исааком Ньютоном в книге «Математические начала натуральной философии» (1687 год)[1][2]. В ньютоновском изложении механики, широко используемом и в настоящее время, эти законы являются аксиомами, базирующимися на обобщении экспериментальных результатов.
Первый закон Ньютона постулирует существование инерциальных систем отсчета. Поэтому он также известен как закон инерции. Инерция (она же инертность[3]) — свойство тела сохранять скорость своего движения неизменной по величине и направлению, когда не действуют никакие силы, а также свойство тела сопротивляться изменению его скорости. Чтобы изменить скорость движения тела, необходимо приложить некоторую силу, причём результат действия одной и той же силы на разные тела будет различным: тела обладают разной инерцией (инертностью), величина которой характеризуется их массой.
Современная формулировка[править | править код]
В современной физике первый закон Ньютона принято формулировать в следующем виде[4]:
Историческая формулировка[править | править код]
Ньютон сформулировал первый закон механики так:
Всякое тело продолжает удерживаться в своём состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние. |
С современной точки зрения, такая формулировка неудовлетворительна. Во-первых, термин «тело» следует заменить термином «материальная точка», так как тело конечных размеров в отсутствие внешних сил может совершать и вращательное движение. Во-вторых, и это главное, Ньютон в своём труде опирался на существование абсолютной неподвижной системы отсчёта, то есть абсолютного пространства и абсолютного времени, а это представление современная физика отвергает. С другой стороны, в произвольной (например, вращающейся) системе отсчёта закон инерции неверен, поэтому ньютоновская формулировка была заменена постулатом существования инерциальных систем отсчета.
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
Масса материальной точки при этом полагается величиной постоянной во времени и независящей от каких-либо особенностей её движения и взаимодействия с другими телами[5][6][7][8].
Современная формулировка[править | править код]
В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. |
При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:
a→=F→m,{\displaystyle {\vec {a}}={\frac {\vec {F}}{m}},}F→{\displaystyle {\vec {F}}} — равнодействующая всех сил, приложенных к материальной точке;
m{\displaystyle m} — масса материальной точки.
Второй закон Ньютона может быть также сформулирован в эквивалентной форме с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна равнодействующей всех приложенных к ней внешних сил. dp→dt=F→,{\displaystyle {\frac {d{\vec {p}}}{dt}}={\vec {F}},} |
где p→=mv→{\displaystyle {\vec {p}}=m{\vec {v}}} — импульс точки, v→{\displaystyle {\vec {v}}} — её скорость, а t{\displaystyle t} — время.
При такой формулировке, как и при предшествующей, полагают, что масса материальной точки неизменна во времени
Иногда предпринимаются попытки распространить сферу применения уравнения dp→dt=F→{\displaystyle {\frac {d{\vec {p}}}{dt}}={\vec {F}}} и на случай тел переменной массы. Однако вместе с таким расширительным толкованием уравнения приходится существенным образом модифицировать принятые ранее определения и изменять смысл таких фундаментальных понятий, как материальная точка, импульс и сила[12][13].
Замечания[править | править код]
Когда на материальную точку действуют несколько сил, с учётом принципа суперпозиции, второй закон Ньютона записывается в виде:
или
dp→dt=∑i=1nFi→.{\displaystyle {\frac {d{\vec {p}}}{dt}}=\sum _{i=1}^{n}{\vec {F_{i}}}.}Второй закон Ньютона, как и вся классическая механика, справедлив только для движения тел со скоростями, много меньшими скорости света. При движении тел со скоростями, близкими к скорости света, используется релятивистское обобщение второго закона, получаемое в рамках специальной теории относительности.
Следует учитывать, что нельзя рассматривать частный случай (при F→=0{\displaystyle {\vec {F}}=0}) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
Историческая формулировка[править | править код]
Исходная формулировка Ньютона:
Изменение количества движения пропорционально приложенной движущей силе и происходит по направлению той прямой, по которой эта сила действует. |
Этот закон описывает, как взаимодействуют две материальные точки. Пусть имеется замкнутая система, состоящая из двух материальных точек, в которой первая точка может действовать на вторую с некоторой силой F→1→2{\displaystyle {\vec {F}}_{1\to 2}}, а вторая — на первую с силой F→2→1{\displaystyle {\vec {F}}_{2\to 1}}. Третий закон Ньютона утверждает: сила действия F→1→2{\displaystyle {\vec {F}}_{1\to 2}} равна по модулю и противоположна по направлению силе противодействия F→2→1{\displaystyle {\vec {F}}_{2\to 1}}.
Третий закон Ньютона является следствием однородности, изотропности и зеркальной симметрии пространства[14][15].
Третий закон Ньютона, как и остальные законы ньютоновской динамики, даёт практически верные результаты лишь только тогда, когда скорости всех тел рассматриваемой системы пренебрежимо малы по сравнению со скоростью распространения взаимодействий (скоростью света)[16].
Современная формулировка[править | править код]
Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению: F→2→1=−F→1→2.{\displaystyle {\vec {F}}_{2\to 1}=-{\vec {F}}_{1\to 2}.} |
Закон утверждает, что силы возникают лишь попарно, причём любая сила, действующая на тело, имеет источник происхождения в виде другого тела. Иначе говоря, сила всегда есть результат взаимодействия тел. Существование сил, возникших самостоятельно, без взаимодействующих тел, невозможно[17].
Историческая формулировка[править | править код]
Ньютон дал следующую формулировку закона[1]:
Действию всегда есть равное и противоположное противодействие, иначе — взаимодействия двух тел друг на друга между собою равны и направлены в противоположные стороны. |
Для силы Лоренца третий закон Ньютона не выполняется. Лишь переформулировав его как закон сохранения импульса в замкнутой системе из частиц и электромагнитного поля, можно восстановить его справедливость[18][19].
Законы Ньютона являются аксиомами классической ньютоновской механики. Из них, как следствия, выводятся уравнения движения механических систем, а также «законы сохранения», указанные ниже. Разумеется, есть и законы (например, всемирного тяготения или Гука), не вытекающие из трёх постулатов Ньютона.
Уравнения движения[править | править код]
Уравнение F→=ma→{\displaystyle {\vec {F}}=m{\vec {a}}} является дифференциальным уравнением: ускорение есть вторая производная от координаты по времени. Это значит, что эволюцию (перемещение) механической системы во времени можно однозначно определить, если задать её начальные координаты и начальные скорости.
Заметим, что если бы уравнения, описывающие наш мир, были бы уравнениями первого порядка, то из нашего мира исчезли бы такие явления, как инерция, колебания, волны.
Закон сохранения импульса[править | править код]
Закон сохранения импульса утверждает, что векторная сумма импульсов всех тел системы есть величина постоянная, если векторная сумма внешних сил, действующих на систему тел, равна нулю[20].
Закон сохранения механической энергии[править | править код]
Если все силы консервативны, то возникает закон сохранения механической энергии взаимодействующих тел: полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной[21].
Использование законов Ньютона предполагает задание некой ИСО. Однако, на практике приходится иметь дело и с неинерциальными системами отсчёта. В этих случаях, помимо сил, о которых идёт речь во втором и третьем законах Ньютона, в механике вводятся в рассмотрение так называемые силы инерции.
Обычно речь идёт о силах инерции двух различных типов[17][22]. Сила первого типа (даламберова сила инерции[23]) представляет собой векторную величину, равную произведению массы материальной точки на её ускорение, взятое со знаком минус. Силы второго типа (эйлеровы силы инерции[23]) используются для получения формальной возможности записи уравнений движения тел в неинерциальных системах отсчёта в виде, совпадающем с видом второго закона Ньютона. По определению, эйлерова сила инерции равна произведению массы материальной точки на разность между значениями её ускорения в той неинерциальной системе отсчёта, для которой эта сила вводится, с одной стороны, и в какой-либо инерциальной системе отсчёта, с другой[17][22]. Определяемые таким образом силы инерции силами в истинном смысле слова не являются[24][17], их называют фиктивными[25], кажущимися[26] или псевдосилами[27].
Законы Ньютона в логике курса механики[править | править код]
Существуют методологически различные способы формулирования классической механики, то есть выбора её фундаментальных постулатов, на основе которых затем выводятся законы-следствия и уравнения движения. Придание законам Ньютона статуса аксиом, опирающихся на эмпирический материал, — только один из таких способов («ньютонова механика»). Этот подход принят в средней школе, а также в большинстве вузовских курсов общей физики.
Альтернативным подходом, использующимся преимущественно в курсах теоретической физики, выступает лагранжева механика. В рамках лагранжева формализма имеются одна-единственная формула (запись действия) и один-единственный постулат (тела движутся так, чтобы действие было стационарным), являющийся теоретической концепцией. Из этого можно вывести все законы Ньютона, правда, только для лагранжевых систем (в частности, для консервативных систем). Следует, однако, отметить, что все известные фундаментальные взаимодействия описываются именно лагранжевыми системами. Более того, в рамках лагранжева формализма можно легко рассмотреть гипотетические ситуации, в которых действие имеет какой-либо другой вид. При этом уравнения движения станут уже непохожими на законы Ньютона, но сама классическая механика будет по-прежнему применима.
Практика применения машин в мануфактурной промышленности, строительство зданий, кораблестроение, использование артиллерии позволили ко времени Ньютона накопиться большому числу наблюдений над механическими процессами. Понятия инерции, силы, ускорения всё более прояснялись в течение XVII столетия. Работы Галилея, Борелли, Декарта, Гюйгенса по механике уже содержали все необходимые теоретические предпосылки для создания Ньютоном в механике логичной и последовательной системы определений и теорем
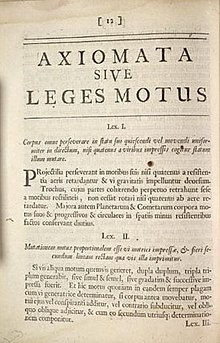 Страница «Начал» Ньютона с аксиомами механики
Страница «Начал» Ньютона с аксиомами механикиОсновные законы механики Исаак Ньютон сформулировал в своей книге «Математические начала натуральной философии»
Оригинальный текст (лат.)
LEX I
Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in directum, nisi quantenus a viribus impressis cogitur statum illum mutare.LEX II
Mutationem motus proportionalem esse vi motrici impressae et fieri secundum lineam rectam qua vis illa imprimitur.LEX III
Actioni contrariam semper et aequalem esse reactionem: sive corporum duorum actiones in se mutuo semper esse aequales et in partes contrarias dirigi.
Русский перевод этих формулировок законов см. в предыдущих разделах.
Первый закон (закон инерции), в менее чёткой форме, опубликовал ещё Галилей, допускавший свободное движение не только по прямой, но и по окружности (видимо, из астрономических соображений)
Ньютон также дал строгие определения таких физических понятий, как количество движения (не вполне ясно использованное у Декарта[29]) и сила. Он ввёл в физику понятие массы как меры инертности тела и, одновременно, его гравитационных свойств (ранее физики пользовались понятием
В середине XVII века ещё не существовало современной техники дифференциального и интегрального исчисления. Соответствующий математический аппарат в 1680-е годы параллельно создавался самим Ньютоном (1642—1727), а также Лейбницем (1646—1716). Завершили математизацию основ механики Эйлер (1707—1783) и Лагранж (1736—1813).
- ↑ 1 2 3 Исаак Ньютон. Математические начала натуральной философии. Перевод с латинского и примечания А. Н. Крылова / под ред. Полака Л. С.. — М.: Наука, 1989. — С. 40—41. — 690 с. — (Классики науки). — 5 000 экз. — ISBN 5-02-000747-1.
- ↑ Тарг С. М. Ньютона законы механики // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Большая российская энциклопедия, 1992. — Т. 3: Магнитоплазменный — Пойнтинга теорема. — С. 370. — 672 с. — 48 000 экз. — ISBN 5-85270-019-3.
- ↑ Инерция // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Советская энциклопедия, 1990. — Т. 2. — С. 146. — 704 с. — ISBN 5-85270-061-4.
- ↑ Инерциальная система отсчёта // Физическая энциклопедия (в 5 томах) / Под редакцией акад. А. М. Прохорова. — М.: Советская Энциклопедия, 1988. — Т. 2. — С. 145. — ISBN 5-85270-034-7.
- ↑ «Дополнительной характеристикой (по сравнению с геометрическими характеристиками) материальной точки является скалярная величина m — масса материальной точки, которая, вообще говоря, может быть как постоянной, так и переменной величиной. … В классической ньютоновской механике материальная точка обычно моделируется геометрической точкой с присущей ей постоянной массой) являющейся мерой её инерции.» стр. 137 Седов Л. И., Цыпкин А. Г. Основы макроскопических теорий гравитации и электромагнетизма. М: Наука, 1989.
- ↑ Маркеев А. П. Теоретическая механика. — М.: ЧеРО, 1999. — С. 87. — 572 с. «Масса материальной точки считается постоянной величиной, не зависящей от обстоятельств движения».
- ↑ Голубев Ю. Ф. Основы теоретической механики. — М.: МГУ, 2000. — С. 160. — 720 с. — ISBN 5-211-04244-1. «Аксиома 3.3.1. Масса материальной точки сохраняет своё значение не только во времени, но и при любых взаимодействиях материальной точки с другими материальными точками независимо от их числа и от природы взаимодействий».
- ↑ Журавлёв В. Ф. Основы теоретической механики. — М.: Физматлит, 2001. — С. 9. — 319 с. — ISBN 5-95052-041-3. «Масса [материальной точки] полагается постоянной, независящей ни от положения точки в пространстве, ни от времени».
- ↑ Маркеев А. П. Теоретическая механика. — М.: ЧеРО, 1999. — С. 254. — 572 с. «…второй закон Ньютона справедлив только для точки постоянного состава. Динамика систем переменного состава требует особого рассмотрения».
- ↑ «В ньютоновской механике… m=const и dp/dt=ma». Иродов И. Е. Основные законы механики. — М.: Высшая школа, 1985. — С. 41. — 248 с..
- ↑ Kleppner D., Kolenkow R. J. An Introduction to Mechanics. — McGraw-Hill, 1973. — P. 112. — ISBN 0-07-035048-5. «For a particle in Newtonian mechanics, M is a constant and (d/dt)(Mv) = M(dv/dt) = Ma».
- ↑ Зоммерфельд А. Механика = Sommerfeld A. Mechanik. Zweite, revidierte auflage, 1944. — Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001. — С. 45—46. — 368 с. — ISBN 5-93972-051-X.
- ↑ Кильчевский Н. А. Курс теоретической механики. Том 1. — М.: Наука, 1977. 480 с.
- ↑ Жирнов Н. И. Классическая механика. — Серия: учебное пособие для студентов физико-математических факультетов педагогических институтов. — М., Просвещение, 1980. — Тираж 28 000 экз. — с. 38
- ↑ Тютин И. В. Симметрия в физике элементарных частиц. Часть 1. Пространственно-временные симметрии. // Соросовский образовательный журнал, 1996, № 5, с. 65
- ↑ Сивухин Д. В. Общий курс физики. Механика. — М., Наука, 1979. — Тираж 50 000 экз. — с. 85
- ↑ 1 2 3 4 Ишлинский А. Ю. Классическая механика и силы инерции. — М.: «Наука», 1987. — 320 с.
- ↑ Матвеев А. Н. Механика и теория относительности. — 3-е изд. — М. Высшая школа 1976. — С. 132.
- ↑ Кычкин И. С., Сивцев В. И. Школьная физика: третий закон Ньютона // Международный журнал экспериментального образования. — 2016. — № 3-2. — С. 191—193.
- ↑ Тарг С. М. Краткий курс теоретической механики. — М.: Высшая школа, 1995. — С. 282. — 416 с. — ISBN 5-06-003117-9.
- ↑ Савельев И. В. Глава 3. Работа и энергия // Курс общей физики. Механика. — 4-е изд. — М.: Наука, 1970. — С. 89—99. — ISBN 5-17-002963-2.
- ↑ 1 2 Тарг С. М. Сила инерции // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Большая российская энциклопедия, 1994. — Т. 4: Пойнтинга — Робертсона — Стримеры. — С. 494—495. — 704 с. — 40 000 экз. — ISBN 5-85270-087-8.
- ↑ 1 2 Ишлинский А. Ю. К вопросу об абсолютных силах и силах инерции в классической механике // Теоретическая механика. Сборник научно-методических статей. — 2000. — № 23. — С. 3—8.
- ↑ «„Силы инерции“ — не силы». Журавлёв В. Ф. Основания механики. Методические аспекты. — М.: ИПМ АН СССР, 1985. — С. 21. — 46 с.
- ↑ Зоммерфельд А. Механика. — Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001. — С. 82. — 368 с. — ISBN 5-93972-051-X.
- ↑ Борн М. Эйнштейновская теория относительности. — М.: «Мир», 1972. — С. 81. — 368 с.
- ↑ Фейнман Р., Лейтон Р., Сэндс М. Выпуск 1. Современная наука о природе. Законы механики // Фейнмановские лекции по физике. — М.: «Мир», 1965. — С. 225.
- ↑ Кузнецов Б. Г. Основные принципы физики Ньютона // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 186—197;
- ↑ 1 2 Кузнецов Б. Г. Генезис механического объяснения физических явлений и идеи картезианской физики // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 160—161, 169—170, 177;
- Лич Дж. У. Классическая механика. М.: Иностр. литература, 1961.
- Спасский Б. И.. История физики. М., «Высшая школа», 1977.
- Том 1. Часть 1-я; Часть 2-я
- Том 2. Часть 1-я; Часть 2-я
- Кудрявцев П. С. Курс истории физики. — М.: Просвещение, 1974.
- Crowell, Benjamin (2011), Light and Matter (2011, Light and Matter), especially at Section 4.2, Newton’s First Law, Section 4.3, Newton’s Second Law, and Section 5.1, Newton’s Third Law.
- Feynman, R. P. (англ.)русск.; Leighton, R. B.; Sands, M. The Feynman Lectures on Physics (неопр.). — 2nd. — Pearson/Addison-Wesley, 2005. — Т. Vol. 1. — ISBN 0-8053-9049-9.
- Fowles, G. R.; Cassiday, G. L. Analytical Mechanics (неопр.). — 6th. — Saunders College Publishing (англ.)русск., 1999. — ISBN 0-03-022317-2.
- Likins, Peter W. (англ.)русск.. Elements of Engineering Mechanics (неопр.). — McGraw-Hill Education, 1973. — ISBN 0-07-037852-5.
- Marion; Jerry; Thornton, Stephen. Classical Dynamics of Particles and Systems (англ.). — Harcourt College Publishers, 1995. — ISBN 0-03-097302-3.
- NMJ Woodhouse. Special Relativity (неопр.). — London/Berlin: Springer, 2003. — С. 6. — ISBN 1-85233-426-6.
- Newton, Isaac, «Mathematical Principles of Natural Philosophy», 1729 English translation based on 3rd Latin edition (1726), volume 1, containing Book 1, especially at the section Axioms or Laws of Motion, starting page 19.
- Newton, Isaac, «Mathematical Principles of Natural Philosophy», 1729 English translation based on 3rd Latin edition (1726), volume 2, containing Books 2 & 3.
- Thomson, W (Lord Kelvin), and Tait, P G, (1867), Treatise on natural philosophy, volume 1, especially at Section 242, Newton’s laws of motion.
Формула силы тяги в физике
В том случае, если тело при перемещении имеет ускорение, то на него кроме всех прочих обязательно действует некоторая сила, которая является силой тяги в рассматриваемый момент времени. В действительности, если тело движется прямолинейно и с постоянной скоростью, то сила тяги также действует, так как тело должно преодолевать силы сопротивления. Обычно силу тяги находят, рассматривая силы, действующие на тело, находя равнодействующую и применяя второй закон Ньютона. Жестко определенной формулы для силы тяги не существует.
Не следует считать, что сила тяги, например, транспортного средства действует со стороны двигателя, так как внутренние силы не могут менять скорость системы как единого целого, что входило бы в противоречие с законом сохранения импульса. Однако следует отметить, что для получения у силы трения покоя необходимого направления, мотор вращает колеса, колеса «цепляются за дорогу» и порождается сила тяги. Теоретически было бы возможно не использовать понятие «сила тяги», а говорить о силе трения покоя или силе реакции воздуха. Но удобнее внешние силы, которые действуют на транспорт делить на две части, при этом одни силы называть силами тяги , а другие — силами сопротивления . Это делается для того, чтобы уравнения движения не потеряли свой универсальный вид и полезная механическая мощность (P) имела простое выражение:
Определение и формула силы тяги
ОпределениеИсходя из формулы (1) силу тяги можно определить через полезную мощность, и скорость транспортного средства (v):
Для автомобиля, поднимающегося в горку, которая имеет уклон , масса автомобиля m сила тяги (FT) войдет в уравнение:
где a – ускорение, с которым движется автомобиль.
Единицы измерения силы тяги
Основной единицей измерения силы в системе СИ является: [FT]=Н
В СГС: [FT]=дин
Примеры решения задач
ПримерЗадание. На автомобиль имеющий массу 1 т при его движении по горизонтальной поверхности, действует сила трения, которая равна =0,1 от силы тяжести. Какой будет сила тяги, если автомобиль движется с ускорением 2 м/с?
Решение. Сделаем рисунок.
В качестве основы для решения задачи используем второй закон Ньютона:
Спроектируем уравнение (1.1) на
Сила — это… Что такое Сила?
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций.[1]
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами. В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы).[2].
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
При приложении силы к телу конечных размеров в нём возникают механические напряжения, сопровождающиеся деформациями.[3][4][5][6]
С точки зрения Стандартной модели физики элементарных частиц фундаментальные взаимодействия (гравитационное, слабое, электромагнитное, сильное) осуществляются посредством обмена так называемыми калибровочными бозонами.[3] Эксперименты по физике высоких энергий, проведённые в 70−80-х гг. XX в. подтвердили предположение о том, что слабое и электромагнитное взаимодействия являются проявлениями более фундаментального электрослабого взаимодействия.[7]
Размерность силы — LMT−2, единицей измерения в Международной системе единиц (СИ) является ньютон (N, Н), в системе СГС — дина.
История понятия
Понятие силы использовали ещё ученые античности в своих работах о статике и движении. Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед.[8] Представления Аристотеля о силе, связанные с фундаментальными несоответствиями, просуществовали в течение нескольких столетий. Эти несоответствия устранил в XVII в. Исаак Ньютон, используя для описания силы математические методы. Механика Ньютона оставалась общепринятой на протяжении почти трехсот лет.[5] К началу XX в. Альберт Эйнштейн в теории относительности показал, что ньютоновская механика верна лишь в при сравнительно небольших скоростях движения и массах тел в системе, уточнив тем самым основные положения кинематики и динамики и описав некоторые новые свойства пространства-времени.
Ньютоновская механика
Исаак Ньютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (знаменитые законы Ньютона).[5][9]
Первый закон Ньютона
Первый закон Ньютона утверждает, что существуют системы отсчета, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий.[9] Такие системы отсчета называются инерциальными. Ньютон предположил, что каждый массивный объект имеет определенный запас инерции, который характеризует «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой физически неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить какие из них находится «в движении», а какие «покоятся». Говорить о движении можно лишь относительно какой-либо системы отсчета. Законы механики выполняются одинаково во всех инерциальных системах отсчета, другими словами все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея.[10]
Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.Например, законы механики абсолютно одинаково выполняются в кузове грузовика, когда тот едет по прямому участку дороги с постоянной скоростью и когда стоит на месте. Человек может подбросить мячик вертикально вверх и поймать его через некоторое время на том же самом месте вне зависимости от того движется ли грузовик равномерно и прямолинейно или покоится. Для него мячик летит по прямой. Однако для стороннего наблюдателя, находящегося на земле, траектория движения мячика имеет вид параболы. Это связано с тем, что мячик относительно земли движется во время полета не только вертикально, но и горизонтально по инерции в сторону движения грузовика. Для человека, находящегося в кузове грузовика не имеет значения движется ли последний по дороге, или окружающий мир перемещается с постоянной скоростью в противоположном направлении, а грузовик стоит на месте. Таким образом, состояние покоя и равномерного прямолинейного движения физически неотличимы друг от друга.
Второй закон Ньютона
 Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]
Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]Второй закон Ньютона в современной формулировке звучит так: в инерциальной системе отсчета скорость изменения импульса материальной точки равна векторной сумме всех сил, действующих на эту точку.
где − импульс материальной точки, − суммарная сила, действующая на материальную точку. Второй закон Ньютона гласит, что действие несбалансированных сил приводит к изменению импульса материальной точки[9].
По определению импульса:
где − масса, − скорость.
В классической механике при скоростях движения много меньше скорости света масса материальной точки считается неизменной, что позволяет выносить её при этих условиях за знак дифференциала :
Учитывая определение ускорения точки, второй закон Ньютона принимает вид:
Считается, что это «вторая самая известная формула в физике», хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде. Впервые данную форму закона можно встретить в трудах К.Маклорена и Л.Эйлера.
Поскольку в любой инерциальной системе отсчёта ускорение тела одинаково и не меняется при переходе от одной системы к другой, то и сила инвариантна по отношению к такому переходу.
Во всех явлениях природы сила, независимо от своего происхождения, проявляется только в механическом смысле, то есть как причина нарушения равномерного и прямолинейного движения тела в инерциальной системе координат. Обратное утверждение, т.е установление факта такого движения, не свидетельствует об отсутствии действующих на тело сил, а лишь о том, что действия этих сил взаимно уравновешиваются. Иначе: их векторная сумма есть вектор с модулем, равным нулю. На этом основано измерение величины силы, когда она компенсируется силой, величина которой известна .
Второй закон Ньютона позволяет измерять величину силы. Например, знание массы планеты и ее центростремительного ускорения при движении по орбите позволяет вычислить величину силы гравитационного притяжения, действующую на эту планету со стороны Солнца.
Третий закон Ньютона
Для любых двух тел (назовем их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2, сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2.[11] Математически закон записывается так:
Этот закон означает, что силы всегда возникают парами «действие-противодействие».[9] Если тело 1 и тело 2 находятся в одной системе, то суммарная сила в системе, обусловленная взаимодействием этих тел равна нулю:
Это означает, что в замкнутой системе не существует несбалансированных внутренних сил. Это приводит к тому, что центр масс замкнутой системы (то есть той, на которую не действуют внешние силы) не может двигаться с ускорением. Отдельные части системы могут ускоряться, но лишь таким образом, что система в целом остается в состоянии покоя или равномерного прямолинейного движения. Однако в том случае, если внешние силы подействуют на систему, то ее центр масс начнет двигаться с ускорением, пропорциональным внешней результирующей силе и обратно пропорциональным массе системы.[3]
Фундаментальные взаимодействия
Все силы в природе основаны на четырех типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные − между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется берущей из античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящими через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие.[12]
Каждый вид взаимодействия обусловлен обменом соответствующих переносчиков взаимодействия: гравитационное − обменом гравитонов (существование не подтверждено экспериментально), электромагнитное − виртуальных фотонов, слабое − векторных бозонов, сильное − глюонов (и на больших расстояниях — мезонов). В настоящее время электромагнитное и слабое взаимодействия объединены в более фундаментальное электрослабое взаимодействие. Делаются попытки объединения всех четырех фундаментальных взаимодействие в одно (так называемая теория великого объединения).
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к этим четырем фундаментальным взаимодействиям. Например, трение − это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули,[13] который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решетки вещества удерживаться около положения равновесия.[3].
Однако на практике оказывается не только нецелесообразной, но и просто невозможной по условиям задачи подобная детализация рассмотрения вопроса о действии сил.
Гравитация
Гравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Исааком Ньютоном в его труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчете, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[14]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой , прямо пропорциональной произведению масс ( и ) и обратно пропорциональной квадрату расстояния между ними:
Здесь − гравитационная постоянная[15], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчета силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в ее основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, черных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[16].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривленным траекториям в трехмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырехмерном пространстве-времени, в котором время в разных точках течет по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[3].
Электромагнитное взаимодействие
Электростатическое поле (поле неподвижных зарядов)
Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью C. Однако, исходя из требований практики, в качестве основной единицы измерения стали использовать не единицу заряда, а единицу силы электрического тока. Так, в системе СИ основной единицей является ампер, а единица заряда — кулон — производная от него.
Поскольку заряд, как таковой, не существует независимо от несущего его тела, то электрическое взаимодействие тел проявляется в виде той же рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух точечных зарядов величинами и , располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:
где — сила, с которой заряд 1 действует на заряд 2, — вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а — электрическая постоянная, равная ≈ 8,854187817•10−12Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — относительная диэлектрическая проницаемость среды.
Сила направлена вдоль линии, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым бы перемещалась лишённая массы заряженная частица. Эти линии начинаются на одном и заканчиваются на другом заряде.
Электромагнитное поле (поле постоянных токов)
Существование магнитного поля признавалось ещё в средние века китайцами, использовавшим «любящий камень» — магнит, в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признаваемую в физике, как модель процесса возникновения магнитного поля, заключающуюся в существовании в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции, лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Единицей измерения магнитной индукции является тесла: 1 Тл = 1 Т кг с−2 А−2
Количественно задача была решена Ампером, измерявшим силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга описывается законом Кулона. Однако заряды, находящиеся в движении относительно друг друга создают магнитные поля, посредством которых созданные движением зарядов токов в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сил взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие
Сильное взаимодействие — короткодействующие силы между адронами и кварками. В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающее отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в т. н. «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе) можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие
Слабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил
Данные виды сил носят феноменологический характер и определяются с помощью теории определяющих соотношений.
Сила упругости — сила упругого сопротивления тела внешней нагрузке. Является макроскопической реакцией межмолекулярного электромагнитного взаимодействия материала тела. Снижается при появлении нарушений микроструктуры тела — при появлении остаточной деформации тела. Направлена против внешней силы.
Сила трения — сила сопротивления относительному перемещению контактирующих поверхностей тел. Зависит от шероховатости и электромагнитной природы материалов контактирующих поверхностей. Сила трения чистых «зеркальных» поверхностей является макроскопическим проявлением их межмолекулярного взаимодействия. Вектор силы трения направлен противоположно вектору относительной скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы сопротивления направлен противоположно вектору скорости.
Сила нормальной реакции опоры — упругая сила, действующая со стороны опоры и противодействующая внешней нагрузке.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к поверхности раздела фаз; возникает вследствие нескомпенсированного притяжения молекул, находящихся на границе раздела фаз, молекулами, находящимися не на границе раздела фаз.
Осмотическое давление
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Ван-дер-Ваальсовы силы быстро убывают с увеличением расстояния.
Сила инерции
Сила инерции — фиктивная сила, вводимая в неинерциальных системах отсчёта. Введение сил инерции производится для того, чтобы придать уравнениям движения тел в неинерциальных системах отсчёта ту же форму, какую имеет уравнение второго закона Ньютона в инерциальных системах. В ряде случаев такой подход позволяет сделать рассмотрение движения более удобным и наглядным, а решение соответствующих задач — более простым.
В частности, в системе отсчёта, связанной с равноускоренно движущимся телом, сила инерции направлена противоположно ускорению. Из полной силы инерции, представляющей собой сумму переносной и кориолисовой, могут быть для удобства выделены центробежная сила и сила Кориолиса.
Силы инерции принципиально отличаются от всех остальных сил тем, что никакому реальному взаимодействию тел они не соответствуют.
Равнодействующая сила
При расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей. Это геометрическая сумма всех сил, действующих на тело. При этом действие каждой силы не зависит от действия других, то есть каждая сила сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение носит название принципа независимости действия сил (принцип суперпозиции).
См. также
Источники
Примечания
- ↑ Glossary. Earth Observatory. NASA. — «Сила — любой внешний фактор, который вызывает изменение в движении свободного тела или возникновение внутренних напряжений в зафиксированном теле.» (англ.)
- ↑ Бронштейн И. Н. Семендяев К. А. Справочник по математике. М.: Издательство «Наука» Редакция справочной физико-математической литературы.1964.
- ↑ 1 2 3 4 5 Feynman, R. P., Leighton, R. B., Sands, M. Lectures on Physics, Vol 1. — Addison-Wesley, 1963. (англ.)
- ↑ Kleppner, D., Kolenkow, R. J. An introduction to mechanics. — McGraw-Hill. (англ.)
- ↑ 1 2 3 University Physics, Sears, Young & Zemansky, pp. 18-38 (англ.)
- ↑ Хайкин С. Э.Силы инерции и невесомость. Изд-во «Наука» М.,1967, с илл.
- ↑ Weinberg, S. Dreams of a Final Theory. — Vintage Books USA, 1994. — ISBN 0-679-74408-8 (англ.)
- ↑ Heath,T.L. The Works of Archimedes (1897). Archive.org. Архивировано из первоисточника 23 августа 2011. Проверено 14 октября 2007. (англ.)
- ↑ 1 2 3 4 Newton, I. The Principia Mathematical Principles of Natural Philosophy. — University of California Press, 1999. — ISBN 0-520-08817-4 (англ.)
- ↑ Мултановский В. В. Курс теоретической физики. Классическая механика. Основы специальной теории относительности. Релятивистская механика. — М.: Просвещение, 1988. — С. 80−81.
- ↑ Henderson, Tom Lesson 4: Newton’s Third Law of Motion. The Physics Classroom (1996-2007). Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ Капра, Фритьоф ДАО ФИЗИКИ. СПб.,»ОРИС»*»ЯНА-ПРИНТ». 1994 г. 304 с. ISBN 5-88436-021-5
- ↑ Nave, R Pauli Exclusion Principle. HyperPhysics***** Quantum Physics. Архивировано из первоисточника 23 августа 2011. Проверено 2 января 2008. (англ.)
- ↑ University Physics, Sears, Young & Zemansky, pp. 59−82 (англ.)
- ↑ Sir Isaac Newton: The Universal Law of Gravitation. Astronomy 161 The Solar System. Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ «Тяготение». Новиков И. Д. // Физическая энциклопедия. Гл. ред. Прохоров А. М. — М.: «Большая Российская энциклопедия», 1998. — Т. 5. — С. 188−193. — 760 с. — ISBN 5-85270-101-7
Обсуждение:Сила/Величина силы. Единичная сила — Википедия
Величина силы. Единичная сила (совсем другой вариант текста)[править код]
Принятого общего определения силы в стиле «F = …», где вместо многоточия стояла бы некая математическая формула, не существует.можно убрать —Mikisavex (обс.) 03:13, 5 августа 2017 (UTC) Количественно сила определяется как величина, равная по модулю и противоположная по направлению к той известной силе, которую она способна уравновесить: F→{\displaystyle {\vec {F}}} = -F→{\displaystyle {\vec {F}}}ref. Под уравновешиванием понимается обеспечение ситуации, когда совместное наложение двух воздействий — изучаемого и известного — не приводит к ускорению тела[1].
Единичной (1 ньютон) объявляется сила Funity, сообщающая свободному телу массой 1 кг (например, эталону килограмма) ускорение 1 м/с2.
Располагая каким-либо способом создания единичной силы Funity, можно «воспроизвести» её в любом числе экземпляров. Ориентируя n таких экземпляров сонаправленно и под некоторым углом α к другим n, также сонаправленным, экземплярам, принципиально можно получить известную суммарную силу F→{\displaystyle {\vec {F}}}ref, действующую вдоль биссектрисы угла[1]. Для модуля Fref = 2nFunity•cos(α/2) доступны любые значения. Ради количественной характеризации (измерения) изучаемой силы F, варьированием α и n подбирается уравновешивающая её Fref при совместном приложении к материальной точке.
Данное выше определение силы и соглашение насчёт Funity не базируются на какой-либо математической связи «сила—ускорение»[2], и, соответственно, сила введена независимо от выражения второго закона Ньютона, хотя другие точки зрения на методы дефиниции силы тоже имеют право на существование[2]. —Mikisavex (обс.) 17:46, 4 августа 2017 (UTC)
Величина силы. Единичная сила (новый вариант текста)[править код]
Количественно сила определяется как отношение величин деформации объекта под изучаемым воздействием и под воздействием, которому отвечает единичная сила[3]: F = Δx/Δxunity•Funity. Единичной (1 Н) объявляется сила Funity, сообщающая телу массой 1 кг (эталону килограмма или его копии) ускорение 1 м/с2.
Деформироваться может упругое тело, подвергнутое воздействиям, или, что нагляднее, тестовая пружина с закреплённым на её торце телом. Опыт показал, что изменение во сколько-то раз воздействия на тело влечёт изменение во столько же раз смещения торца пружины Δx. (Подобные наблюдения легли в основу закона Гука.) Это важно для естественности терминологии: сила F, условно говоря, пропорциональна воздействию, то есть реально выступает его мерой. Опытным же путём подтверждена независимость отношения Δxi/Δxj от выбора пружины для любых воздействий i, j, в том числе разнотипных, гарантирующая непротиворечивость определения. Далее, экспериментами с не закреплёнными телами установлено, что сила придаёт им ускорение, причём равные силы вызывают одинаковые ускорения одного и того же тела.
Как видно из формулы для F, сила равна деформации с точностью до калибровочного множителя, «жёсткости», используемой пружины: F = k•Δx, где k = Funity/Δxunity. Воспроизведя единичную силу Funity, можно измерить Δxunity и найти k для любой пружины, а затем использовать её для измерений «в числе».
Данное выше определение силы и соглашение насчёт Funity не базируются на какой-либо математической связи «сила—ускорение»[2], и, соответственно, сила введена независимо от выражения второго закона Ньютона, хотя другие точки зрения на методы дефиниции силы тоже имеют право на существование[2]. —Mikisavex (обс.) 12:30, 3 августа 2017 (UTC)
=== Величина силы. Единичная сила === Сила определяется как величина, пропорциональная продольной деформации объекта (F ~ Δx), вызываемой воздействием на него. Деформироваться может само тело, подвергнутое воздействию, или, что нагляднее, тестовая пружина, на торце которой тело закреплено.
Очевидное кратное увеличение внешнего воздействия (пример: подвешивание двух-трёх одинаковых кирпичей вместо одного) влечёт такое же изменение (удвоение, утроение) смещения торца пружины и, по определению, такое же кратное увеличение силы. Подобные наблюдения лежат в основе закона Гука. Отношение Δxi/Δxj для любых двух сил Fi, Fj не зависит от выбора тестовой пружины, так что осуществимо «сравнительное» измерение сил: F = Fref/Δxref•Δx = k•Δx, где F — исследуемая сила, Δx — создаваемая ею деформация, Δxref — то же для другой силы Fref, взятой для сравнения, k — калибровочный множитель («жёсткость» данной пружины).
На опыте проверяется, что равные силы вызывают одинаковые ускорения любого не закреплённого тела. Единичная сила вводится специальным соглашением: один ньютон — это сила, сообщающая телу массой 1 кг (эталон килограмма задаётся конкретным объектом) ускорение в 1 м/с2. Наличие соглашения логически позволяет воспроизвести силу 1 Н, вычислять жёсткости пружин, а затем измерять силы с их помощью уже «в числе». При этом не используется какой-либо математической связи «сила—ускорение»[2] и, соответственно, сила определена независимо от выражения второго закона Ньютона.вариант утратил актуальность —Mikisavex (обс.) 03:13, 5 августа 2017 (UTC)
- ↑ 1 2 И.Бутиков, А.С.Кондратьев. § 16. Сила — мера взаимодействия // Физика для углубленного изучения 1. Механика. — С. 88—90.
- ↑ 1 2 3 4 5 Матвеев А. Н. Механика и теория относительности. — М.: ОНИКС, 2003. — 432 с. — ISBN 5-329-00742-9 [гл. 5, §§ 19—20].
- ↑ Яворский Б. М., Детлаф А. А. Справочник по физике. — М.: Наука, 1965. — 848 с. [отд. 1, гл. 2]. — в справочнике приведено равенство F1/F2 = Δx1/Δx2 для упругих деформаций; если одну из сил объявить единичной, приходим к сформулированному определению
сила — Толковый словарь Ушакова
С’ИЛА, силы, ·жен.
1. Способность живых существ производить физические действие, энергия, порождаемая способностью управлять движениями мышц. «Какой-то муравей был силы непомерной…» Крылов. «Пригожеством, ростом и силой ты ровни в селе не имел.» Некрасов. «Силы коняге набраться неоткуда.» Салтыков-Щедрин. «Санька… захлопнула дверь изо всей силы.» А.Н.Толстой. Обладать огромной силой. Ударить с силой.
| только ед. Физическое воздействие, насилие. «Смекнул старик, что тут силой не возьмешь.» Салтыков-Щедрин. Действовать убеждением, а не силой. Применять силу.
| только мн. Жизнедеятельность, физическая энергия, бодрость. Выбиться из сил (см. выбиться). Собраться с силами (см. собраться). Лишиться сил. Приняться за работу со свежими силами. В расцвете сил.
2. Напряжение, энергия как причина, выводящая тело, материю из состояния покоя или изменяющая направление, скорость движения (научн.). Центробежная сила. Сила тяжести. Равнодействующая сила. Сила инерции. Сила притяжения земли. Сила натяжения нити.
| только ед. Интенсивность, напряженность чего-нибудь, степень напряжения; в механике — величина, равная произведению массы тела на его ускорение. Сила света. Сила звука. Сила взрыва. Сила ветра. Сила тока. В физике за единицу силы принята дина. Сила, с которой вылетает пробка.
| только мн. Материя, все материальное как источник деятельности, движения, изменений. Производительные силы (см. производительный). «В Советском Союзе идет возрождение многочисленных национальностей, идет подъем хозяйственных сил и национальных культур всех народов.» Молотов. «Наш опыт, опыт строителей коммунистического общества, уже полностью показал, что возможности роста сил ·СССР неограниченно велики.» Молотов. Использование водных сил страны.
3. Способность проявления какой-нибудь деятельности, характерная степенью, устремленностью, напряженностью проявления этой деятельности. Сила воли. Сила ума. Сила привычки. Сила фантазии. Сила таланта. Талант огромной силы. «Плохо верится в добра.» Некрасов. «Человеку прекрасней и шире можно вои развернуть.» Некрасов. Душевные силы.
| только мн. Средство, способ проявления деятельности. «Он всеми силами старался свергнуть с себя бремя этих упреков.» Гончаров. Верю всеми силами души — и посвящу этому делу всю свою жизнь Тургенев.
4. Вообще — источник чего-нибудь, какой-нибудь деятельности, явления. «Ты был всегда ареной деятельной силы, пытливой мысли и труда!» Некрасов. «Непреодолимая сила влекла меня к ней.» А.Тургенев. Советская *****
силы страны. Войти в силу — 1) то же, что взять силу. «Конопляники уже вошли в силу и пускают свой тяжелый, но приятный дух.» А.Тургенев. 2) перен. стать влиятельным, авторитетным. В силах — 1) ·без·доп. и с ·инф. с неослабевшими силами, в состоянии что-нибудь делать (по своему здоровью). Пока я в силах, поработаю. «Я не в силах сносить этой пытки.» Гончаров. 2) с ·инф. иметь возможность, власть (·чаще с отрицанием). «И то, что в жизни взято раз, не в силах рок отнять у нас.» Некрасов. «Только содержащий все общество класс пролетариев в силах произвести социальную революцию.» Ленин. В силе — 1) в таком состоянии, когда есть власть, влияние. «Колхозы и совхозы были слабы, а кулак был еще в силе.» Сталин (о 1924 ·г. ). 2) *****
в силу труд.» Крылов. В силу чего (или, реже, всилу; ·книж.) — вследствие, по причине. В силу создавшихся условий. Лошадиная сила — см. лошадиный. Нечистая сила — см. нечистый. От силы (·прост.) — самое большее, самое вероятное. Ему от силы 20 лет. Здесь от силы два кило. По мере сил — см. мера. По силам или по силе — соответственно возможностям, силам, способностям. По силе возможности (·прост.) — то же, что по мере возможности (см. мера). Под силу — соответствует силам, возможностям, в состоянии справиться с чем-нибудь. «Мне не под силу, брат, я чувствую, что глуп.» Грибоедов. «Современному французскому буржуа ни героизм, ни идеалы уже не под силу.» Салтыков-Щедрин. Рабочая сила — см. рабочий2. Сил нет — 1) отсутствуют силы делать что-нибудь, нет возможности справиться (см. сила в 1 ·знач. ). «Сил нам нет кружиться доле.» Пушкин. «От напора ветра нет сил дышать.» Чехов. 2) перен. употр. при выражении отчаяния, бессилия что-нибудь сделать, чем-нибудь воспрепятствовать чему-нибудь (·разг. ·фам. ). Сил нет, как надоел своей болтовней. Силою в (от, до; воен.) — количеством, численностью. Колонна силою в тысячу штыков. Колонна силою около полка. Силою вещей (·книж.) — по причине сложившихся обстоятельств, условий. Капитализм силою вещей обречен на гибель. Силы небесные (церк., ·устар.) — ·первонач. ангелы как небесное воинство, а позднее вообще — мистические силы неба, божества. С нами крестная сила — см. крестный. Через силу — сверх имеющихся возможностей, сил, способностей. Что есть силы или что было силы (или сил; ·разг.) — изо всех сил. «Комар, что было сил, сонливца укусил.» Крылов. «Что силы есть, хвать друга камнем в лоб.» Крылов.
Источник: Толковый словарь русского языка Ушакова на Gufo.me
Значения в других словарях
- СИЛА — В механике, мера механич. действия на данное материальное тело других тел. Это действие вызывает изменение скоростей точек тела или его деформацию и может иметь место как при непосредств. Физический энциклопедический словарь
- сила — -ы, ж. 1. Способность живых существ напряжением мышц производить физические движения, действия; физическая энергия человека, животного. Малый академический словарь
- сила — • адская ~ • бешеная ~ • богатырская ~ • большая ~ • великая ~ • гигантская ~ • грозная ~ • громадная ~ • дикая ~ • дьявольская ~ • железная ~ • значительная ~ • исключительная ~ • исполинская ~ • колоссальная ~ • крупная ~ • максимальная ~ • мощная ~ •… Словарь русской идиоматики
- сила — сущ., кол-во синонимов… Словарь синонимов русского языка
- сила — орф. сила, -ы Орфографический словарь Лопатина
- Сила — (Деян 15:40; сокращенное слово Силуан 2 Кор 1:19) — один из 70-ти апостолов, называемый в кн. Деяний начальствующим между братьями (15:22) и верным братом (1 Пет 5:16). Библейская энциклопедия архим. Никифора
- Сила — • Sila, Σίλα 1. лес в Бруттии, еще н. Sila. Он тянется от города Консенции (н. Cosenza) до Сицилийского пролива и преимущественно славится смолой, которая из него добывается. Cic. Brut. 22, 85. Strab. 6, 261; 2. город Италии у Адриатического моря. Polib. 34, 11. Словарь классических древностей
- сила — см.: етитский; недетский Толковый словарь русского арго
- сила — СИЛА I. В механике — мера механического воздействия на материальное тело со стороны др. тел или полей; вызывает изменение скоростей точек тела или его деформацию. — движущая сила. Словарь спортивных терминов
- сила — 1. Физическая (мышечная) энергия человека. Богатырская, большая, бычья, великая, воловья, геркулесовская (геркулесова), громадная, дюжая (разг.), железная (разг.), звериная (разг.), крепкая, лошадиная, медвежья, могучая, молодая, молодецкая (разг. Словарь эпитетов русского языка
- сила — Крепость, мощь, держава, власть, вес Поддерживайте дисциплину железной рукой прот. != бессилие, слабость ср. !! власть, значение, достоинство, причина см. >> авторитет, власть, достоинство, значение, причина, суть см. Словарь синонимов Абрамова
- Сила — Сила (греч. ф-ма арам. имени, соотв. евр. Шаул, в Синод. пер. — Саул («испрошенный»)). С., называемый в посланиях своим лат. именем Силуан (от silva — лес), — один из ближайших сотрудников Павла и, как и апостол, рим. гражданин (Деян 16:37). Библейская энциклопедия Брокгауза
- сила — (интенсивность) звука. Качество звука, зависящее от амплитуды (размаха) колебаний, т. е. от расстояния высшей точки подъема и низшей точки падения звуковой волны: чем сильнее размах, тем сильнее звук. Словарь лингвистических терминов Розенталя
- сила — Общеслав. Родственно лит. siela «убеждение». Ср. убедить. Этимологический словарь Шанского
- сила — Сила, силы, силы, сил, силе, силам, силу, силы, силой, силою, силами, силе, силах Грамматический словарь Зализняка
- сила — : в силу ч е г о и с и л о й ч е г о (вследствие, по причине). Я вышел во двор и бессознательно, в силу стародавней привычки, направился к тому самому цеху, в котором провел не один год (Бахметьев). И скоро силою вещей мы очутились в Париже (Пушкин). Управление в русском языке
- сила — Си́л/а. Морфемно-орфографический словарь
- сила — СИЛА -ы; ж. 1. обычно ед. Способность живых существ к физическим действиям, требующим значительного напряжения мышц. Мышечная с. С. рук, ног. С. в руках, ногах у кого-л. Недюжинной силы кто-л. Ударить изо всей силы. Толкнуть кого-л. Толковый словарь Кузнецова
- Сила — орф. Сила, муж. имя (Силич, Силична) Орфографический словарь Лопатина
- сила — • Богатырская (Никитин). • Геркулесовская (Андреев). • Гордая (Кольцов). • Дюжая (Дрожжин). • Крепкая (Коринфский). • Могучая (Фруг). • Молодецкая (Коринфский, Розенгейм). • Мятежная (Фруг). • Непомерная (Крылов, Сологуб). • Сила-моченька (Некрасов). Словарь литературных эпитетов
- сила — Индоевропейское – sei- (связь, соединение). Общеславянское – sila (сила). Слово «сила» известно с древнерусской поры (XI в.) со значениями «естественная способность, свойство», «телесная сила», «духовная сила», «могущество», «власть» и др. Этимологический словарь Семёнова
- сила — СИЛА ж. источник, начало, основная (неведомая) причина всякого действия, движенья, стремленья, понужденья, всякой вещественой перемены в пространстве, или: начало изменяемости мировых явлений, Хомяков. Тяготенье основная сила природы. Толковый словарь Даля
- сила — Превосходство, здорово Словарь воровского жаргона
- сила — I. (иноск.) — множество, пропасть Ср. Лука этакой силы денег (по 100 р. со штуки) дать и сообразить не мог; Лесков. Запечатленный Ангел. 8. II. (иноск.) — сущность дела, причина, основание Ср. «В силу чего-либо поступать». Ср. Фразеологический словарь Михельсона
- Сила — I Си́ла в механике, величина, являющаяся мерой механического действия на данное материальное тело других тел… Большая советская энциклопедия
- сила — сила I ж. 1. Способность живых существ напряжением мышц производить физические движения, действия; физическая энергия. || перен. Физическое воздействие, насилие. Толковый словарь Ефремовой
- сила — си́ла укр. си́ла, блр. сíла, др.-русск., ст.-слав. сила δύναμις, ἰσχύς (Остром., Мар., Зогр., Супр.), болг. си́ла, сербохорв. си̏ла, словен. síla, чеш. sîla, слвц. sila, польск. siɫa, в.-луж., н.-луж. sуɫа. Праслав. silа родственно лит. Этимологический словарь Макса Фасмера
- СИЛА — СИЛА — в механике — мера механического действия на данное материальное тело со стороны других тел… Большой энциклопедический словарь
- сила — СИЛА — СЛАБОСТЬ Физическая сила — физическая слабость. Сила характера — слабость характера. ○ Сила [Л. Толстого] — в критике нашего строя с точки зрения якобы признаваемых этим строем христианских начал. Словарь антонимов русского языка
- Сила — Ы, муж. Стар. редк. Отч.: Силич, Силична. Производные: Силка; Силаша. Происхождение: (Предположительно от лат. Sila — Сила (лес в южной Италии)) Именины: 17 янв., 8 апр., 12 авг. Словарь личных имен
- СИЛА — СИЛА (обозначение F), в широком смысле — причина ударов, толчков или поворотов, испытываемых телом. Сила, действующая на предмет, может 1) уравновешивать равную… Научно-технический словарь
- сила — СИЛА, ы, ж. 1. Величина, являющаяся мерой механического взаимодействия тел, вызывающего их ускорение или деформацию; характеристика интенсивности физических процессов (спец.). Единица силы. Центробежная с. С. тяжести. С. тока. С. света. С. инерции. Толковый словарь Ожегова
- Сила — С’ила (Деян.15:22 ,27,32,34,40; Деян.16:19 ,25,29; Деян.17:4 ,10,14,15; Деян.18:5) — верующий из Иерусалима, начальствующий между братиями и пророк, посланный с ·ап. Павлом в Антиохию. Позже он сопровождал ·ап. Павла в некоторых его путешествиях. Библейский словарь Вихлянцева
- сила — сущ., ж., употр. наиб. часто (нет) чего? силы, чему? силе, (вижу) что? силу, чем? силой, о чём? о силе; мн. что? силы, (нет) чего? сил, чему? силам, (вижу) что? силы, чем? силами, о чём? о силах… Толковый словарь Дмитриева
- сила — Взять силу (простореч.) — усилиться, окрепнуть. ► Огонь силу взял. Даль. Войти в силу 1) то же, что взять силу. ► Конопляники уже вошли в силу и пускают свой тяжелый, но приятный дух. Тургенев. 2) перен. стать влиятельным, авторитетным. Фразеологический словарь Волковой
- сила — Мощь, могущество. Краткий церковнославянский словарь

Центробежная сила — Википедия
Центробе́жная си́ла[1] — составляющая фиктивных сил инерции, которую вводят при переходе из инерциальной системы отсчёта в соответствующим образом вращающуюся неинерциальную. Это позволяет в полученной неинерциальной системе отсчёта продолжать применять законы Ньютона для расчёта ускорения тел через баланс сил.
Зачастую это бывает удобно. Например, когда вращается целиком вся лаборатория, может быть более удобным рассматривать все движения относительно неё, введя лишь дополнительно силы инерции, в том числе центробежную, действующие на все материальные точки, чем учитывать постоянное изменение положения каждой точки относительно инерциальной системы отсчета.
Часто, особенно в технической литературе, во вращающуюся с телом неинерциальную систему отсчёта переходят неявно, и говорят о проявлениях закона инерции как о центробежной силе, действующей со стороны движущегося по круговой траектории тела на вызывающие это вращение связи, и считают её по определению равной по модулю центростремительной силе и всегда направленной в противоположную ей сторону.
Однако в общем случае, когда мгновенный центр поворота тела по дуге окружности, которой аппроксимируется траектория в каждой её точке, может не совпадать с началом вектора силы, вызывающей движение, неверно называть действующую на связь силу силой центробежной. Ведь есть ещё составляющая силы связи, направленная по касательной к траектории, и эта составляющая будет изменять скорость движения тела по ней. Поэтому некоторые физики вообще избегают использовать термин «центробежная сила», как ненужный[2].
Обычно понятие центробежной силы используется в рамках классической (Ньютоновской) механики, которой касается основная часть данной статьи (хотя обобщение этого понятия и может быть в некоторых случаях достаточно легко получено для релятивистской механики).
По определению, центробежной силой называется сила инерции (то есть в общем случае — часть полной силы инерции) в неинерциальной системе отсчета, не зависящая от скорости движения материальной точки в этой системе отсчета, а также не зависящая от ускорений (линейных или угловых) самой этой системы отсчета относительно инерциальной системы отсчета.
Для материальной точки центробежная сила выражается формулой:
- F→=−m[ω→×[ω→×R→]]=m(ω2R→−(ω→⋅R→)ω→),{\displaystyle {\vec {F}}=-m\left[{\vec {\omega }}\times \left[{\vec {\omega }}\times {\vec {R}}\right]\right]=m\left(\omega ^{2}{\vec {R}}-\left({\vec {\omega }}\cdot {\vec {R}}\right){\vec {\omega }}\right),}
где:
- F→{\displaystyle {\vec {F}}} — центробежная сила приложенная к телу,
- m{\displaystyle \ m} — масса тела,
- ω→{\displaystyle {\vec {\omega }}} — угловая скорость вращения неинерциальной системы отсчёта относительно инерциальной (направление вектора угловой скорости определяется по правилу буравчика),
- R→{\displaystyle {\vec {R}}} — радиус-вектор тела во вращающейся системе координат.
Эквивалентное выражение для центробежной силы можно записать как
- F→=mω2R0→{\displaystyle {\vec {F}}=m\omega ^{2}{\vec {R_{0}}}}
если использовать обозначение R0→{\displaystyle {\vec {R_{0}}}} для вектора, перпендикулярного оси вращения и проведенного от неё к данной материальной точке.
Центробежная сила для тел конечных размеров может быть рассчитана (как это обычно делается и для любых других сил) суммированием центробежных сил, действующих на материальные точки, являющиеся элементами, на которые мы мысленно разбиваем конечное тело.
Вывод[править | править код]
Пусть тело совершает сложное движение: движется относительно неинерциальной системы отсчёта со скоростью v→n,{\displaystyle {\vec {v}}_{n},} а сама система движется поступательно с линейной скоростью v→0{\displaystyle {\vec {v}}_{0}} в инерциальной системе координат и одновременно вращается с угловой скоростью ω→.{\displaystyle {\vec {\omega }}.}
Тогда линейная скорость тела в инерциальной системе координат равна:
v→=v→0+[ω→×R→]+v→n,{\displaystyle {\vec {v}}={\vec {v}}_{0}+\left[{\vec {\omega }}\times {\vec {R}}\right]+{\vec {v}}_{n},}
где R→{\displaystyle {\vec {R}}} — радиус-вектор центра масс тела относительно неинерциальной системы отсчета. Продифференцируем данное уравнение:
ddtv→=ddtv→0+ddt[ω→×R→]+ddtv→n.{\displaystyle {\frac {d}{dt}}{\vec {v}}={\frac {d}{dt}}{\vec {v}}_{0}+{\frac {d}{dt}}\left[{\vec {\omega }}\times {\vec {R}}\right]+{\frac {d}{dt}}{\vec {v}}_{n}.}
Найдём значение каждого слагаемого в инерциальной системе координат:
ddtv→0=a→0,{\displaystyle {\frac {d}{dt}}{\vec {v}}_{0}={\vec {a}}_{0},}
ddtv→n=a→n+[ω→×v→n],{\displaystyle {\frac {d}{dt}}{\vec {v}}_{n}={\vec {a}}_{n}+\left[{\vec {\omega }}\times {\vec {v}}_{n}\right],}
ddt[ω→×R→]=[ε→×R→]+[ω→×ddtR→]=[ε→×R→]+[ω→×v→n]+[ω→×[ω→×R→]],{\displaystyle {\frac {d}{dt}}\left[{\vec {\omega }}\times {\vec {R}}\right]=\left[{\vec {\varepsilon }}\times {\vec {R}}\right]+\left[{\vec {\omega }}\times {\frac {d}{dt}}{\vec {R}}\right]=\left[{\vec {\varepsilon }}\times {\vec {R}}\right]+\left[{\vec {\omega }}\times {\vec {v}}_{n}\right]+\left[{\vec {\omega }}\times \left[{\vec {\omega }}\times {\vec {R}}\right]\right],} где a→n{\displaystyle {\vec {a}}_{n}} — линейное ускорение относительно системы, ε→{\displaystyle {\vec {\varepsilon }}} — угловое ускорение.
Таким образом, получаем:
- ddtv→=a→=a→0+a→n+[ε→×R→]+2[ω→×v→n]+[ω→×[ω→×R→]].{\displaystyle {\frac {d}{dt}}{\vec {v}}={\vec {a}}={\vec {a}}_{0}+{\vec {a}}_{n}+\left[{\vec {\varepsilon }}\times {\vec {R}}\right]+2\left[{\vec {\omega }}\times {\vec {v}}_{n}\right]+\left[{\vec {\omega }}\times \left[{\vec {\omega }}\times {\vec {R}}\right]\right].}
Последнее слагаемое и будет центростремительным ускорением.
Раскрыв двойное векторное произведение и положив R→{\displaystyle {\vec {R}}} перпендикулярным оси вращения, получим:
- a→c=ω→(ω→R→)−R→ω→2=−R→ω→2.{\displaystyle {\vec {a}}_{c}={\vec {\omega }}({\vec {\omega }}{\vec {R}})-{\vec {R}}{\vec {\omega }}^{2}=-{\vec {R}}{\vec {\omega }}^{2}.}
Элементарное рассмотрение и мотивировка[править | править код]
Вращение с точки зрения инерциальной системы отсчета[править | править код]
Рассмотрим спицу, вращающуюся вокруг перпендикулярной к ней вертикальной оси с угловой скоростью ω{\displaystyle \omega }. Вместе со спицей вращается надетый на неё шарик, соединённый с осью пружиной.
Согласно второму закону Ньютона шарик займёт положение равновесия на таком расстоянии R{\displaystyle R} от центра диска, на котором сила натяжения пружины Fpr{\displaystyle F_{\mathrm {pr} }} оказывается равной произведению массы шарика m{\displaystyle m} на его ускорение[3]an=ω2R{\displaystyle a_{n}=\omega ^{2}R}:
- Fpr=−mω2R=−mv2R{\displaystyle F_{\mathrm {pr} }=-m\omega ^{2}R=-m{\frac {v^{2}}{R}}}.[4]
Связанная со спицей система отсчёта вращается по отношению к инерциальной системе. Относительно системы отсчёта, связанной со спицей, шарик покоится, хотя на него действует сила упругости пружины. Это не противоречит второму закону Ньютона, так как вращающаяся система отсчёта не является инерциальной и соотношение F→=ma→{\displaystyle {\vec {F}}=m{\vec {a}}} в ней не выполняется.
Вращение с точки зрения неинерциальной системы отсчёта. Сила инерции[править | править код]
Для практических целей, однако, удобнее считать, что второй закон Ньютона выполняется и с точки зрения вращающейся системы отсчёта, введя для этого формально силу инерции Fcf=−Fpr=mω2R{\displaystyle F_{\mathrm {cf} }=-F_{\mathrm {pr} }=m\omega ^{2}R}[4], действующую на шарик вдоль радиуса от центра диска наряду с реальной силой Fpr{\displaystyle F_{\mathrm {pr} }}.
Силу инерции Fcf{\displaystyle F_{\mathrm {cf} }}, вводимую во вращающейся системе отсчёта, называют центробежной силой. Эта сила действует на тело во вращающейся системе отсчёта, независимо от того, покоится тело в этой системе или движется относительно неё со скоростью v{\displaystyle v}’.
Следует иметь в виду, что для правильного описания движения тел во вращающихся системах отсчёта, кроме центробежной силы следует также вводить силу Кориолиса.
В литературе встречается и совсем другое понимание термина «центробежная сила». Так иногда называют реальную силу, приложенную не к совершающему вращательное движение телу, а действующую со стороны тела на ограничивающие его движение связи. В рассмотренном выше примере так называли бы силу, действующую со стороны шарика на пружину. (См., например, ниже ссылку на БСЭ.)
Центростремительная и центробежная силы при движении тел по круговым траекториям с общей осью вращенияПрименяемый не к связям, а, наоборот, к поворачиваемому телу, как объекту своего воздействия, термин «центробежная сила» (букв. сила, приложенная к поворачивающемуся или вращающемуся материальному телу, заставляющая его бежать от мгновенного центра поворота), есть эвфемизм, основанный на ложном толковании первого закона (принципа Ньютона)[5] в форме:
Всякое тело сопротивляется изменению своего состояния покоя или равномерного прямолинейного движения под действием внешней силы
Или ещё[6]:
Всякое тело стремится сохранять состояние покоя или равномерного прямолинейного движения до тех пор, пока не подействует внешняя сила.
Отголоском этой традиции и является представление о некоей силе, как о материальном факторе, реализующем это сопротивление или стремление. О существовании такой силы уместно было бы говорить, если бы, например, вопреки действующим силам, движущееся тело сохраняло бы свою скорость, но это не так[7].
Первый закон Ньютона, нередко называемый принципом и потому допускающим различия в словесной форме его выражения, сводится к утверждению, что природа вещей такова, что скорость движения материальной точки, как по величине, так и по направлению в некоторой системе отсчёта (сам Ньютон связывал её с эфиром, заполняющим всё пространство)[5], остаётся постоянной, но начинает изменяться тотчас, как возникает на то причина, называемая силой.
Рассматриваемое тело с массой (точнее — инертной массой) m{\displaystyle m} приобретает отличающееся от нуля ускорение a{\displaystyle a} в тот же момент t=0{\displaystyle t=0}, когда начинает действовать на него сила F{\displaystyle F} (Второй закон Ньютона:F→=ma→{\displaystyle {\vec {F}}=m{\vec {a}}}). Однако для достижения отличающейся от нуля скорости v{\displaystyle v} требуется некоторое время t{\displaystyle t} в соответствии с определением импульса силы: t=mv/F{\displaystyle t=mv/F}. Или, иначе, скорость тела не изменяется сама по себе, без причины, но она начинает изменяться тотчас, как на него начинает действовать сила[8].
Использование термина «центробежная сила» правомочно тогда, когда точкой её приложения является не испытывающее поворот тело, а ограничивающее его движение связи. В этом смысле центробежная сила представляет собой один из членов в формулировке третьего закона Ньютона, антагониста центростремительной силе, вызывающей поворот рассматриваемого тела и к нему приложенной. Обе эти силы равны по величине и противоположны по направлению, но приложены к разным телам и потому не компенсируют друг друга, а вызывают реально ощутимый эффект — изменение направления движения тела (материальной точки).
Оставаясь в инерциальной системе отсчёта, рассмотрим два небесных тела, например, компонента двойной звезды с массами одного порядка величины M1{\displaystyle {M_{1}}} и M2{\displaystyle {M_{2}}}, находящихся на расстоянии R{\displaystyle R} друг от друга. В принятой модели эти звёзды рассматриваются как материальные точки и R{\displaystyle R} есть расстояние между их центрами масс. В роли связи между этими телами выступает сила Всемирного тяготения FG:GM1M2/R2{\displaystyle {F_{G}}:{GM_{1}M_{2}/R^{2}}}, где G{\displaystyle G}- гравитационная постоянная. Это — единственная здесь действующая сила, она вызывает ускоренное движение тел навстречу друг другу.
Однако, в том случае, если каждое из этих тел совершает вращение вокруг общего центра масс с линейными скоростями v1{\displaystyle {v_{1}}} = ω1{\displaystyle {\omega }_{1}} R1{\displaystyle {R_{1}}} и v2{\displaystyle {v_{2}}} = ω2{\displaystyle {\omega _{2}}} R2{\displaystyle {R_{2}}}, то подобная динамическая система будет неограниченное время сохранять свою конфигурацию, если угловые скорости вращения этих тел будут равны: ω1{\displaystyle {\omega _{1}}} = ω2{\displaystyle {\omega _{2}}} = ω{\displaystyle \omega }, а расстояния от центра вращения (центра масс) будут соотноситься, как: M1/M2{\displaystyle {M_{1}/M_{2}}} = R2/R1{\displaystyle {R_{2}/R_{1}}}, причём R2+R1=R{\displaystyle {R_{2}}+{R_{1}}=R}, что непосредственно следует из равенства действующих сил: F1=M1a1{\displaystyle {F_{1}}={M_{1}}{a_{1}}} и F2=M2a2{\displaystyle {F_{2}}={M_{2}}{a_{2}}}, где ускорения равняются соответственно: a1{\displaystyle {a_{1}}}= ω2R1{\displaystyle {\omega ^{2}}{R_{1}}} и a2=ω2R2{\displaystyle {a_{2}}={\omega ^{2}}{R_{2}}}[9].
Центростремительные силы, вызывающие движение тел по круговым траекториям равны (по модулю): F1{\displaystyle {F_{1}}} =F2{\displaystyle {F_{2}}} =FG{\displaystyle ={F_{G}}}. При этом первая из них является центростремительной, а вторая — центробежной и наоборот: каждая из сил в соответствии с Третьим законом является и той, и другой.
Поэтому, строго говоря, использование каждого из обсуждаемых терминов излишне, поскольку они не обозначают никаких новых сил, являясь синонимами единственной силы — силы тяготения. То же самое справедливо и в отношении действия любой из упомянутых выше связей.
Однако, по мере изменения соотношения между рассматриваемыми массами, то есть всё более значительного расхождения в движении обладающих этими массами тел, разница в результатах действия каждой из рассматриваемых тел для наблюдателя становится всё более значительной.
В ряде случаев наблюдатель отождествляет себя с одним из принимающих участие тел, и потому оно становится для него неподвижным. В этом случае при столь большом нарушении симметрии в отношении к наблюдаемой картине, одна из этих сил оказывается неинтересной, поскольку практически не вызывает движения.
- ↑ Вне контекста физики/механики/математики, например, в философии, публицистике или художественной литературе, а также иногда и в разговорной речи, слова центробежная сила могут нередко употребляться просто как обозначение некоего влияния, направленного прочь от некоторого «центра»; в таком употреблении это может быть никак не связано не только с каким-либо вращением, но и с понятием силы, как оно употребляется в физике.
- ↑ С. Э. Хайкин. Силы инерции и невесомость. М.,1967 г. Издательство «Наука». Главная редакция физико-математической литературы.
- ↑ Воспользуемся формулой центростремительного ускорения.
- ↑ 1 2 Физическая энциклопедия, т.4 — М.:Большая Российская Энциклопедия стр.494 и стр.495
- ↑ 1 2 Ньютон И. Математические начала натуральной философии. Пер. и прим. А. Н. Крылова. М.: Наука, 1989
- ↑ Ключевым в этой формулировке является утверждение о наличии у предметов материального мира неких волевых качеств, что было в начале формирования научных представлений об окружающем мире весьма распространённым способом обобщения результатов наблюдения за явлениями природы и выяснения свойственных ей общих закономерностей . Примером такого анималистического представления о природе являлся бытовавший в натурфилософии принцип: «Природа боится пустоты», от которого пришлось отказаться после эксперимента Торричелли (Торричеллиева пустота)
- ↑ В связи с этим Максвелл заметил, что, с таким же успехом можно было бы сказать, что кофе сопротивляется тому, чтобы стать сладким, апеллируя к тому, что он становится сладким не сам по себе, а лишь после того, что в него положен сахар.
- ↑ С. Э. Хайкин. Силы инерции и невесомость. М.: «Наука», 1967 г.
- ↑ При этом в каждый малый момент времени каждое из тел будет приближаться к центру на такое расстояние, какое равно разности расстояний между его траекторией и касательной в точке наблюдения. Иными словами, тела падают друг на друга, но всегда промахиваются.
Сила — это… Что такое Сила?
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций.[1]
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами. В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы).[2].
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
При приложении силы к телу конечных размеров в нём возникают механические напряжения, сопровождающиеся деформациями.[3][4][5][6]
С точки зрения Стандартной модели физики элементарных частиц фундаментальные взаимодействия (гравитационное, слабое, электромагнитное, сильное) осуществляются посредством обмена так называемыми калибровочными бозонами.[3] Эксперименты по физике высоких энергий, проведённые в 70−80-х гг. XX в. подтвердили предположение о том, что слабое и электромагнитное взаимодействия являются проявлениями более фундаментального электрослабого взаимодействия.[7]
Размерность силы — LMT−2, единицей измерения в Международной системе единиц (СИ) является ньютон (N, Н), в системе СГС — дина.
История понятия
Понятие силы использовали ещё ученые античности в своих работах о статике и движении. Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед.[8] Представления Аристотеля о силе, связанные с фундаментальными несоответствиями, просуществовали в течение нескольких столетий. Эти несоответствия устранил в XVII в. Исаак Ньютон, используя для описания силы математические методы. Механика Ньютона оставалась общепринятой на протяжении почти трехсот лет.[5] К началу XX в. Альберт Эйнштейн в теории относительности показал, что ньютоновская механика верна лишь в при сравнительно небольших скоростях движения и массах тел в системе, уточнив тем самым основные положения кинематики и динамики и описав некоторые новые свойства пространства-времени.
Ньютоновская механика
Исаак Ньютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (знаменитые законы Ньютона).[5][9]
Первый закон Ньютона
Первый закон Ньютона утверждает, что существуют системы отсчета, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий.[9] Такие системы отсчета называются инерциальными. Ньютон предположил, что каждый массивный объект имеет определенный запас инерции, который характеризует «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой физически неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить какие из них находится «в движении», а какие «покоятся». Говорить о движении можно лишь относительно какой-либо системы отсчета. Законы механики выполняются одинаково во всех инерциальных системах отсчета, другими словами все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея.[10]
Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.Например, законы механики абсолютно одинаково выполняются в кузове грузовика, когда тот едет по прямому участку дороги с постоянной скоростью и когда стоит на месте. Человек может подбросить мячик вертикально вверх и поймать его через некоторое время на том же самом месте вне зависимости от того движется ли грузовик равномерно и прямолинейно или покоится. Для него мячик летит по прямой. Однако для стороннего наблюдателя, находящегося на земле, траектория движения мячика имеет вид параболы. Это связано с тем, что мячик относительно земли движется во время полета не только вертикально, но и горизонтально по инерции в сторону движения грузовика. Для человека, находящегося в кузове грузовика не имеет значения движется ли последний по дороге, или окружающий мир перемещается с постоянной скоростью в противоположном направлении, а грузовик стоит на месте. Таким образом, состояние покоя и равномерного прямолинейного движения физически неотличимы друг от друга.
Второй закон Ньютона
 Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]
Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]Второй закон Ньютона в современной формулировке звучит так: в инерциальной системе отсчета скорость изменения импульса материальной точки равна векторной сумме всех сил, действующих на эту точку.
где − импульс материальной точки, − суммарная сила, действующая на материальную точку. Второй закон Ньютона гласит, что действие несбалансированных сил приводит к изменению импульса материальной точки[9].
По определению импульса:
где − масса, − скорость.
В классической механике при скоростях движения много меньше скорости света масса материальной точки считается неизменной, что позволяет выносить её при этих условиях за знак дифференциала :
Учитывая определение ускорения точки, второй закон Ньютона принимает вид:
Считается, что это «вторая самая известная формула в физике», хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде. Впервые данную форму закона можно встретить в трудах К.Маклорена и Л.Эйлера.
Поскольку в любой инерциальной системе отсчёта ускорение тела одинаково и не меняется при переходе от одной системы к другой, то и сила инвариантна по отношению к такому переходу.
Во всех явлениях природы сила, независимо от своего происхождения, проявляется только в механическом смысле, то есть как причина нарушения равномерного и прямолинейного движения тела в инерциальной системе координат. Обратное утверждение, т.е установление факта такого движения, не свидетельствует об отсутствии действующих на тело сил, а лишь о том, что действия этих сил взаимно уравновешиваются. Иначе: их векторная сумма есть вектор с модулем, равным нулю. На этом основано измерение величины силы, когда она компенсируется силой, величина которой известна .
Второй закон Ньютона позволяет измерять величину силы. Например, знание массы планеты и ее центростремительного ускорения при движении по орбите позволяет вычислить величину силы гравитационного притяжения, действующую на эту планету со стороны Солнца.
Третий закон Ньютона
Для любых двух тел (назовем их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2, сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2.[11] Математически закон записывается так:
Этот закон означает, что силы всегда возникают парами «действие-противодействие».[9] Если тело 1 и тело 2 находятся в одной системе, то суммарная сила в системе, обусловленная взаимодействием этих тел равна нулю:
Это означает, что в замкнутой системе не существует несбалансированных внутренних сил. Это приводит к тому, что центр масс замкнутой системы (то есть той, на которую не действуют внешние силы) не может двигаться с ускорением. Отдельные части системы могут ускоряться, но лишь таким образом, что система в целом остается в состоянии покоя или равномерного прямолинейного движения. Однако в том случае, если внешние силы подействуют на систему, то ее центр масс начнет двигаться с ускорением, пропорциональным внешней результирующей силе и обратно пропорциональным массе системы.[3]
Фундаментальные взаимодействия
Все силы в природе основаны на четырех типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные − между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется берущей из античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящими через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие.[12]
Каждый вид взаимодействия обусловлен обменом соответствующих переносчиков взаимодействия: гравитационное − обменом гравитонов (существование не подтверждено экспериментально), электромагнитное − виртуальных фотонов, слабое − векторных бозонов, сильное − глюонов (и на больших расстояниях — мезонов). В настоящее время электромагнитное и слабое взаимодействия объединены в более фундаментальное электрослабое взаимодействие. Делаются попытки объединения всех четырех фундаментальных взаимодействие в одно (так называемая теория великого объединения).
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к этим четырем фундаментальным взаимодействиям. Например, трение − это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули,[13] который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решетки вещества удерживаться около положения равновесия.[3].
Однако на практике оказывается не только нецелесообразной, но и просто невозможной по условиям задачи подобная детализация рассмотрения вопроса о действии сил.
Гравитация
Гравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Исааком Ньютоном в его труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчете, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[14]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой , прямо пропорциональной произведению масс ( и ) и обратно пропорциональной квадрату расстояния между ними:
Здесь − гравитационная постоянная[15], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчета силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в ее основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, черных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[16].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривленным траекториям в трехмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырехмерном пространстве-времени, в котором время в разных точках течет по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[3].
Электромагнитное взаимодействие
Электростатическое поле (поле неподвижных зарядов)
Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью C. Однако, исходя из требований практики, в качестве основной единицы измерения стали использовать не единицу заряда, а единицу силы электрического тока. Так, в системе СИ основной единицей является ампер, а единица заряда — кулон — производная от него.
Поскольку заряд, как таковой, не существует независимо от несущего его тела, то электрическое взаимодействие тел проявляется в виде той же рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух точечных зарядов величинами и , располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:
где — сила, с которой заряд 1 действует на заряд 2, — вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а — электрическая постоянная, равная ≈ 8,854187817•10−12Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — относительная диэлектрическая проницаемость среды.
Сила направлена вдоль линии, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым бы перемещалась лишённая массы заряженная частица. Эти линии начинаются на одном и заканчиваются на другом заряде.
Электромагнитное поле (поле постоянных токов)
Существование магнитного поля признавалось ещё в средние века китайцами, использовавшим «любящий камень» — магнит, в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признаваемую в физике, как модель процесса возникновения магнитного поля, заключающуюся в существовании в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции, лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Единицей измерения магнитной индукции является тесла: 1 Тл = 1 Т кг с−2 А−2
Количественно задача была решена Ампером, измерявшим силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга описывается законом Кулона. Однако заряды, находящиеся в движении относительно друг друга создают магнитные поля, посредством которых созданные движением зарядов токов в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сил взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие
Сильное взаимодействие — короткодействующие силы между адронами и кварками. В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающее отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в т. н. «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе) можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие
Слабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил
Данные виды сил носят феноменологический характер и определяются с помощью теории определяющих соотношений.
Сила упругости — сила упругого сопротивления тела внешней нагрузке. Является макроскопической реакцией межмолекулярного электромагнитного взаимодействия материала тела. Снижается при появлении нарушений микроструктуры тела — при появлении остаточной деформации тела. Направлена против внешней силы.
Сила трения — сила сопротивления относительному перемещению контактирующих поверхностей тел. Зависит от шероховатости и электромагнитной природы материалов контактирующих поверхностей. Сила трения чистых «зеркальных» поверхностей является макроскопическим проявлением их межмолекулярного взаимодействия. Вектор силы трения направлен противоположно вектору относительной скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы сопротивления направлен противоположно вектору скорости.
Сила нормальной реакции опоры — упругая сила, действующая со стороны опоры и противодействующая внешней нагрузке.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к поверхности раздела фаз; возникает вследствие нескомпенсированного притяжения молекул, находящихся на границе раздела фаз, молекулами, находящимися не на границе раздела фаз.
Осмотическое давление
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Ван-дер-Ваальсовы силы быстро убывают с увеличением расстояния.
Сила инерции
Сила инерции — фиктивная сила, вводимая в неинерциальных системах отсчёта. Введение сил инерции производится для того, чтобы придать уравнениям движения тел в неинерциальных системах отсчёта ту же форму, какую имеет уравнение второго закона Ньютона в инерциальных системах. В ряде случаев такой подход позволяет сделать рассмотрение движения более удобным и наглядным, а решение соответствующих задач — более простым.
В частности, в системе отсчёта, связанной с равноускоренно движущимся телом, сила инерции направлена противоположно ускорению. Из полной силы инерции, представляющей собой сумму переносной и кориолисовой, могут быть для удобства выделены центробежная сила и сила Кориолиса.
Силы инерции принципиально отличаются от всех остальных сил тем, что никакому реальному взаимодействию тел они не соответствуют.
Равнодействующая сила
При расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей. Это геометрическая сумма всех сил, действующих на тело. При этом действие каждой силы не зависит от действия других, то есть каждая сила сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение носит название принципа независимости действия сил (принцип суперпозиции).
См. также
Источники
Примечания
- ↑ Glossary. Earth Observatory. NASA. — «Сила — любой внешний фактор, который вызывает изменение в движении свободного тела или возникновение внутренних напряжений в зафиксированном теле.» (англ.)
- ↑ Бронштейн И. Н. Семендяев К. А. Справочник по математике. М.: Издательство «Наука» Редакция справочной физико-математической литературы.1964.
- ↑ 1 2 3 4 5 Feynman, R. P., Leighton, R. B., Sands, M. Lectures on Physics, Vol 1. — Addison-Wesley, 1963. (англ.)
- ↑ Kleppner, D., Kolenkow, R. J. An introduction to mechanics. — McGraw-Hill. (англ.)
- ↑ 1 2 3 University Physics, Sears, Young & Zemansky, pp. 18-38 (англ.)
- ↑ Хайкин С. Э.Силы инерции и невесомость. Изд-во «Наука» М.,1967, с илл.
- ↑ Weinberg, S. Dreams of a Final Theory. — Vintage Books USA, 1994. — ISBN 0-679-74408-8 (англ.)
- ↑ Heath,T.L. The Works of Archimedes (1897). Archive.org. Архивировано из первоисточника 23 августа 2011. Проверено 14 октября 2007. (англ.)
- ↑ 1 2 3 4 Newton, I. The Principia Mathematical Principles of Natural Philosophy. — University of California Press, 1999. — ISBN 0-520-08817-4 (англ.)
- ↑ Мултановский В. В. Курс теоретической физики. Классическая механика. Основы специальной теории относительности. Релятивистская механика. — М.: Просвещение, 1988. — С. 80−81.
- ↑ Henderson, Tom Lesson 4: Newton’s Third Law of Motion. The Physics Classroom (1996-2007). Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ Капра, Фритьоф ДАО ФИЗИКИ. СПб.,»ОРИС»*»ЯНА-ПРИНТ». 1994 г. 304 с. ISBN 5-88436-021-5
- ↑ Nave, R Pauli Exclusion Principle. HyperPhysics***** Quantum Physics. Архивировано из первоисточника 23 августа 2011. Проверено 2 января 2008. (англ.)
- ↑ University Physics, Sears, Young & Zemansky, pp. 59−82 (англ.)
- ↑ Sir Isaac Newton: The Universal Law of Gravitation. Astronomy 161 The Solar System. Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ «Тяготение». Новиков И. Д. // Физическая энциклопедия. Гл. ред. Прохоров А. М. — М.: «Большая Российская энциклопедия», 1998. — Т. 5. — С. 188−193. — 760 с. — ISBN 5-85270-101-7