2. Параметры сигнала. Теория электрической связи (37)
1) Тс — длительность сигнала;
2) Дс — динамический диапазон сигнала
Дс = ; g, h = — отношение сигнала к помехе.
Чем больше g, тем больше вероятность правильного приема.
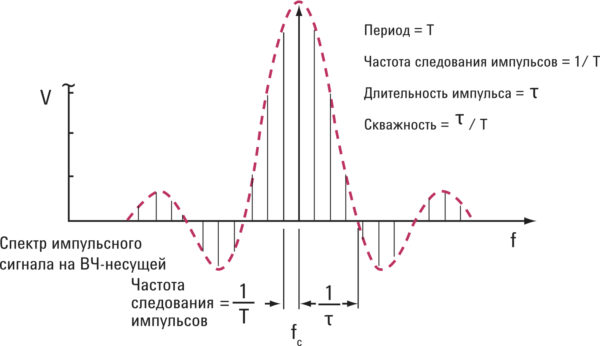
3) Fc — ширина спектра сигнала, связанных со скоростью изменения сигнала (скорость изменения функции). Большая скорость изменения, следовательно, спектр широкий, меньше скорость изменения — спектр узкий
t — время задержки
если t увеличивается спектр стягивается. если t уменьшается спектр расширяется, амплитуда уменьшается.
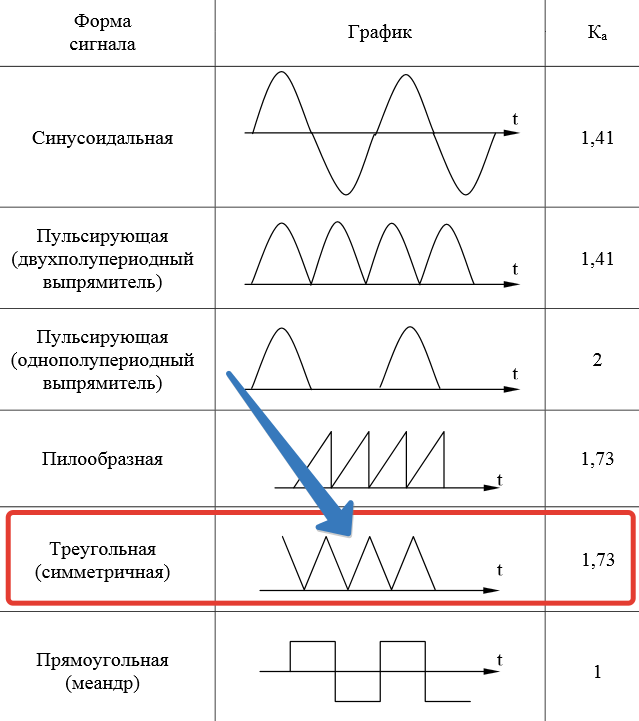
Любой сигнал, имеющий форму, отличную от гармонического (cos, sin) является сложным, следовательно, его можно разложить на отдельные составляющие Тc * Дс * Fc=Vc — объем сигнала
При прохождении через КС сигнал искажается. Параметры канала:
Параметры канала:
1) Тк > Тc (Тк время безотказной работы канала)
2) Дк >Дс (Дк — динамический диапазон канала)
3) fr — ширина полосы пропускания канала.
Пропускаются те спектральные составляющие, которые попадают в Fк.
Fк — должно быть таким, чтобы пропускались все спектральные составляющие
Дискретным по уровню (3) называется такой сигнал, Тк *Дк * Fк= Vк -объем канала связи. Vк ≥ Vc — достаточное условие для передачи сигнала через КС.
Один параметр можно заменить на другой, не изменяя объема.
Основные свойства КС:
1) Все КС можно рассмотреть как линейную систему, т.е. к каналу связи применим принцип суперпозиции (то, что подаем на вход, то получаем на выходе).
2) Во всех КС даже при отсутствии полезного сигнала, существует помеха, т.е. канала без помехи не существует.
3) При прохождении через КС сигнал задерживается на некоторое время t и его уровень изменяется m раз. х (t) = m * S (t —t) + W(t) — на выходе.
Если m и t не постоянны, то такой канал называется каналом с переменными параметрами.
Если на вход приемника сигнал поступает несколькими способами, то такой канал называется многопутевой (многолучевой) канал.
Линия связи — физическая среда, при помощи которой соединяется вход приемника с выходом передачи, или наоборот.
Многоканальной — называется такая система связи (СС), которая обеспечивает передачу сообщений от пго количества источников к nму количеству получателей без взаимного влияния.
РУ — разделительное устройство.
Теория электрической связи
Теория электрической связи
ОглавлениеПредисловиеСписок сокращений Основные обозначения ВВЕДЕНИЕ Глава 1. Сообщения, сигналы и помехи, их математические модели 1.1. Основные понятия и определения 1.1.1. Сообщение, сигнал, модуляция 1.1.2. Основные параметры сигналов 1.2. Системы связи. Каналы связи 1.2.1. Структура канала электросвязи 1.2.2. Линия и сеть связи 1.2.3. Помехи и искажения в канале 1.2.5. Модели каналов связи и их математическое описание 1.3. Способы описания сигналов и помех 1.3.1. Сигнал и его математическая модель 1.3.2. Энергетические характеристики детерминированного сигнала 1.4.2. Представление сигналов и помех рядом Фурье 1.4.3. Применение преобразования Фурье для непериодических сигналов 1.5. Теорема Котельникова 1.  6. Пространство сигналов 6. Пространство сигналов1.6.1. Линейное пространство 1.6.2. Представление сигнала в многомерном пространстве 1.7. Сигналы как случайные процессы 1.7.2. Флуктуационный шум 1.8. Комплексное представление сигналов и помех 1.8.1. Понятие аналитического сигнала 1.8.2. Огибающая, мгновенная фаза и мгновенная частота узкополосного случайного процесса Контрольные вопросы Глава 2. Методы формирования и преобразования сигналов 2.1. Модуляция сигналов 2.1.1. Амплитудная модуляция гармонической несущей 2.1.2. Балансная и однополосная модуляция гармонической несущей 2.2. Методы угловой модуляции 2.2.1. Принципы частотной и фазовой (угловой) модуляции 2.2.2. Спектр сигналов угловой модуляции 2.3. Формирование и детектирование модулированных сигналов 2.3.2. Формирование и детектирование сигналов угловой модуляции 2.  4. Манипуляция сигналов 4. Манипуляция сигналов2.4.1. Временные и спектральные характеристики амплитудно-манипулированных сигналов 2.4.2. Временные и спектральные характеристики частотно-манипулированных сигналов 2.4.3. Фазовая (относительно-фазовая) манипуляция сигналов 2.5. Системы связи с многопозиционной относительной фазовой манипуляцией 2.5.1. Принцип формирования сигнала с многократной относительной фазовой манипуляцией 2.5.3. Принцип частотной модуляции с непрерывной фазой Контрольные вопросы Глава 3. Помехоустойчивость приема дискретных сообщений 3.1. Критерии качества и правила приема дискретных сообщений 3.1.1. Понятие о помехоустойчивости систем электрической связи 3.1.2. Задача оптимального приема 3.1.3. Вычисление вероятностей ошибок 3.2. Оптимальная демодуляция при когерентном приеме сигналов 3.2.1. Оптимальные алгоритмы приема при полностью известных сигналах 3.2.2. Реализация алгоритмов оптимального когерентного приема 3.  3.4. Прием сигналов с неопределенной фазой 3.4.1. Оптимальный некогерентный прием дискретных сигналов 3.4.2. Помехоустойчивость оптимального некогерентного приема 3.5. Подоптимальные методы приема 3.5.1. Причины применения неоптимальных методов приема 3.5.2. Квазиоптимальные методы приема Контрольные вопросы Глава 4. Теория передачи информации 4.1. Информационные характеристики источника сообщений 4.1.1. Количественное определение информации 4.1.2. Энтропия и производительность дискретного источника сообщений 4.2. Пропускная способность дискретного канала 4.2.1. Количество информации переданной по дискретному каналу 4.2.3. Пропускная способность симметричного дискретного канала без памяти 4.3. Методы сжатия дискретных сообщений 4.3.1. Условия существования оптимального неравномерного кода 4.3.2. Прямая и обратная теоремы кодирования источника неравномерными кодами 4.  3.3. Показатели эффективности сжатия 3.3. Показатели эффективности сжатия4.3.4. Кодирование источника дискретных сообщений методом Шеннона-Фано 4.3.5. Кодирование источника дискретных сообщений методом Хаффмена 4.4. Пропускная способность непрерывного канала 4.4.1. Постановка задачи передачи дискретных сообщений в непрерывном канале 4.4.3. Пропускная способность непрерывного канала Контрольные вопросы Глава 5. Теория кодирования сообщений 5.1. Помехоустойчивое кодирование: блочные и непрерывные коды 5.1.1. Постановка задачи помехоустойчивого кодирования 5.1.2. Классификация кодов 5.1.3. Основные характеристики и свойства блочных кодов 5.2. Эффективность помехоустойчивого кодирования 5.2.1. Эффективность кода в режиме исправления ошибок 5.2.2. Эффективность кода в режиме обнаружения ошибок 5.2.3. Эффективность помехоустойчивых кодов 5.3. Математические основы теории помехоустойчивого кодирования  3.1. Краткие сведения из теории чисел 3.1. Краткие сведения из теории чисел5.3.2. Группы 5.3.3. Кольца и поля 5.3.4. Векторное пространство 5.3.5. Конечные поля 5.4. Линейные блочные коды 5.4.1. Система передачи дискретных сообщений 5.4.2. Параметры линейного кода 5.4.3. Полиномиальные циклические коды 5.4.4. Циклические коды и корни полиномов 5.4.5. Спектральное описание циклических кодов 5.4.6. Простейшие блочные линейные коды 5.5. Коды Боуза-Чоудхури-Хоквингема 5.5.1. Методы задания кодов БЧХ 5.5.2. Принципы декодирования кодов БЧХ 5.5.3. Методы реализации этапов декодирования кодов БЧХ 5.6.1. Основные определения 5.6.2. Обнаружение и исправление пакетов ошибок 5.7. Коды Рида-Маллера 5.7.1. Задание и декодирование кодов Рида-Маллера 5.7.2. Симплексные коды и m-последовательности 5.7.3. Связь между блочными кодами 5.8. Сверточные коды 5.8.1. Основные параметры 5.8.2. Способы задания сверточного кода 5.  8.3. Алгоритм декодирования Витерби 8.3. Алгоритм декодирования Витерби5.9. Помехоустойчивость систем передачи дискретных сообщений 5.9.1. Две процедуры приема сигналов 5.9.2. Помехоустойчивость систем передачи информации при оптимальной процедуре приема Контрольные вопросы Глава 6. Сигналы с импульсной модуляцией 6.1. Методы импульсной модуляции 6.1.1. Импульсные методы передачи непрерывных сигналов 6.1.2. Спектральные характеристики импульсных методов модуляции 6.2. Помехоустойчивость непрерывных каналов связи с импульсной модуляцией 6.2.1. Помехоустойчивость систем передачи с импульсными методами модуляции 6.3. Цифровые методы передачи непрерывных сообщений 6.3.1. Передача сигналов с импульсно-кодовой модуляцией 6.3.2. Передача сигналов с дельта модуляцией 6.3.3. Квантование сигналов в системах с ИКМ и ДМ Контрольные вопросы 7.  1. Прием сигналов в каналах с замираниями 1. Прием сигналов в каналах с замираниями7.1.1. Сущность замираний и их классификация 7.1.2. Принципы разнесенного приема сигналов 7.2. Методы борьбы с замираниями сигналов 7.2.1. Методы борьбы с замираниями в аналоговых системах связи 7.2.2. Методы борьбы с замираниями в цифровых системах связи 7.3. Методы борьбы с межсимвольной интерференцией 7.3.1. Причины возникновения и сущность межсимвольной интерференции 7.3.2. Обработка сигналов в каналах с межсимвольной интерференцией 7.3.3. Помехоустойчивость в каналах с межсимвольной интерференцией 7.4.1. Общая характеристика сосредоточенных по спектру и импульсных помех 7.4.2. Борьба с сосредоточенными и импульсными помехами 7.5. Компенсация помех и искажений в канале 7.5.1. Принцип работы радиолинии с ФМ ПСС (ФМ ШПС) 7.5.2. Помехоустойчивость радиолинии с ФМ ПСС 7.5.3. Принципы работы радиолиний с ППРЧ 7. 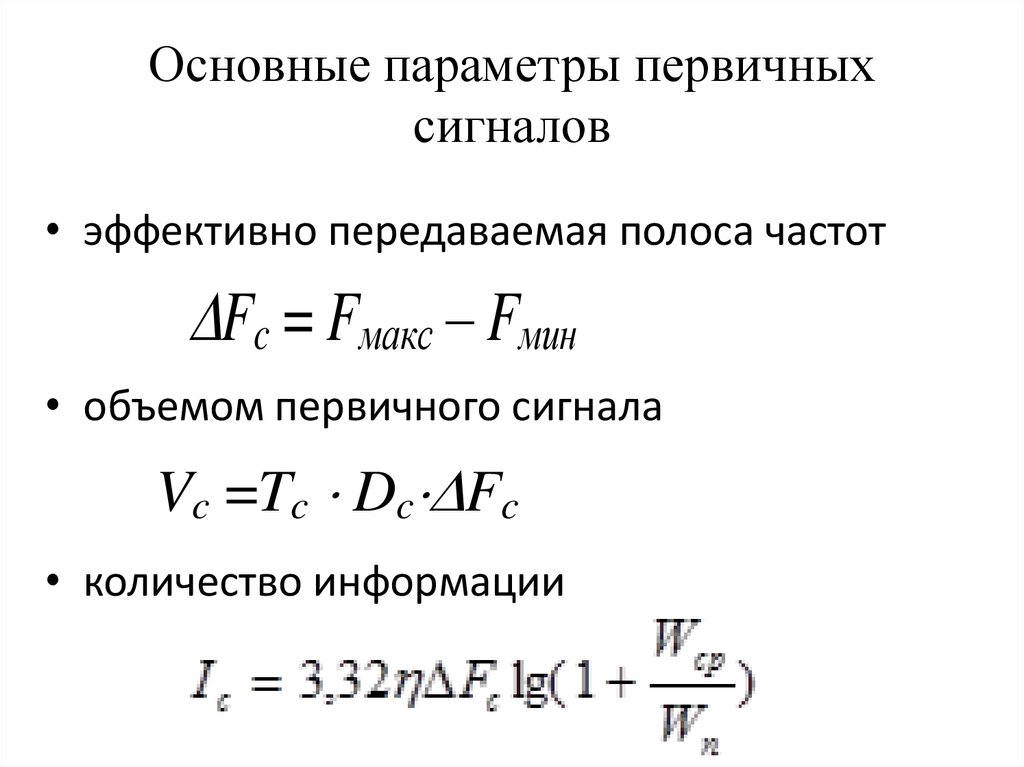 5.4. Помехоустойчивость радиолиний с ППРЧ 5.4. Помехоустойчивость радиолиний с ППРЧКонтрольные вопросы Глава 8. Многоканальная связь и распределение информации 8.1. Методы распределения ресурса общего канала 8.1.1. Классификация систем передачи информации, использующих единый ресурс 8.1.2. Постановка задачи объединения и разделения сигналов 8.1.3. Энергетическая и спектральная цена уплотнения 8.2. Частотное разделение каналов 8.2.1. Принцип частотного объединения и разделения каналов 8.2.2. Групповой сигнал, его структура и характеристики 8.3. Временное разделение каналов 8.3.1. Принцип временного разделения каналов 8.3.2. Характеристики группового сигнала систем с ВРК 8.4. Разделение сигналов по форме Контрольные вопросы Глава 9. Эффективность систем связи 9.1. Оценка эффективности систем связи 9.1.1. Подходы к оценке эффективности 9.1.2. Критерии эффективности 9.1.3. Эффективность аналоговых и цифровых систем 9.2. Выбор сигналов и помехоустойчивых кодов 9. 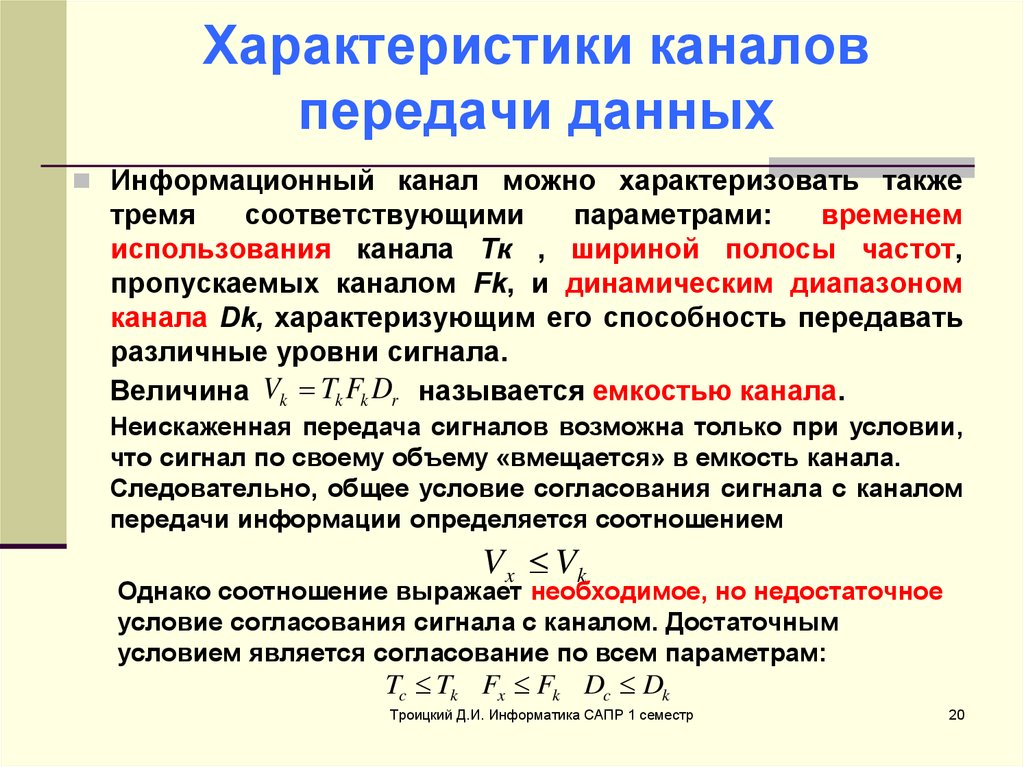 2.1. Многопозиционные сигналы 2.1. Многопозиционные сигналы9.2.2. Корректирующие коды 9.3. Оптимизация систем связи 9.3.1. Согласование методов модуляции и кодирования 9.3.2. Классификация сигнально – кодовых конструкций 9.4. Характеристики основных типов СКК 9.4.1. Согласование канала кодом Грея 9.4.2. Согласование на основе разбиения ансамбля на вложенные подансамбли 9.5. Алгоритмы цифровой обработки сигналов 9.5.1. Дискретные сигналы и их спектры 9.5.2. Алгоритмы дискретного и быстрого преобразований Фурье Контрольные вопросы Глава 10. Теоретико-информационные основы криптозащиты сообщений в телекоммуникационных системах 10.1. Классификация криптографических систем 10.1.2. Классификация криптографических систем защиты информации 10.1.3. Оценка стойкости криптосистем 10.2. Функции, используемые в криптографических системах 10.2.1. Общее описание функций, используемых в криптографических системах 10.2.2. Однонаправленные функции 10.2.3. Криптографические хэш-функции 10.  3. Модели криптографических систем 3. Модели криптографических систем10.3.1. Системы шифрования 10.3.2. Традиционные симметричные криптосистемы 10.4. Алгоритмы криптографической защиты 10.4.1. Алгоритм криптографической защиты информации согласно ГОСТ 28147-89 Контрольные вопросы Заключение Список литературы |

преобразований параметров и сигналов — MATLAB & Simulink
Введение
Чтобы полностью понять результаты, сгенерированные блоками Simulink ® с фиксированной точкой, вы должны знать об этих проблемах: типы данных
Когда входные сигналы преобразуются из одного типа данных с фиксированной точкой в другой (если есть)
Когда арифметические операции над входными сигналами и параметрами выполнено
Например, предположим, что блок Simulink с фиксированной точкой выполняет арифметическую операцию над своим входным сигналом и
параметра, а затем генерирует выходные данные с характеристиками, указанными
блок.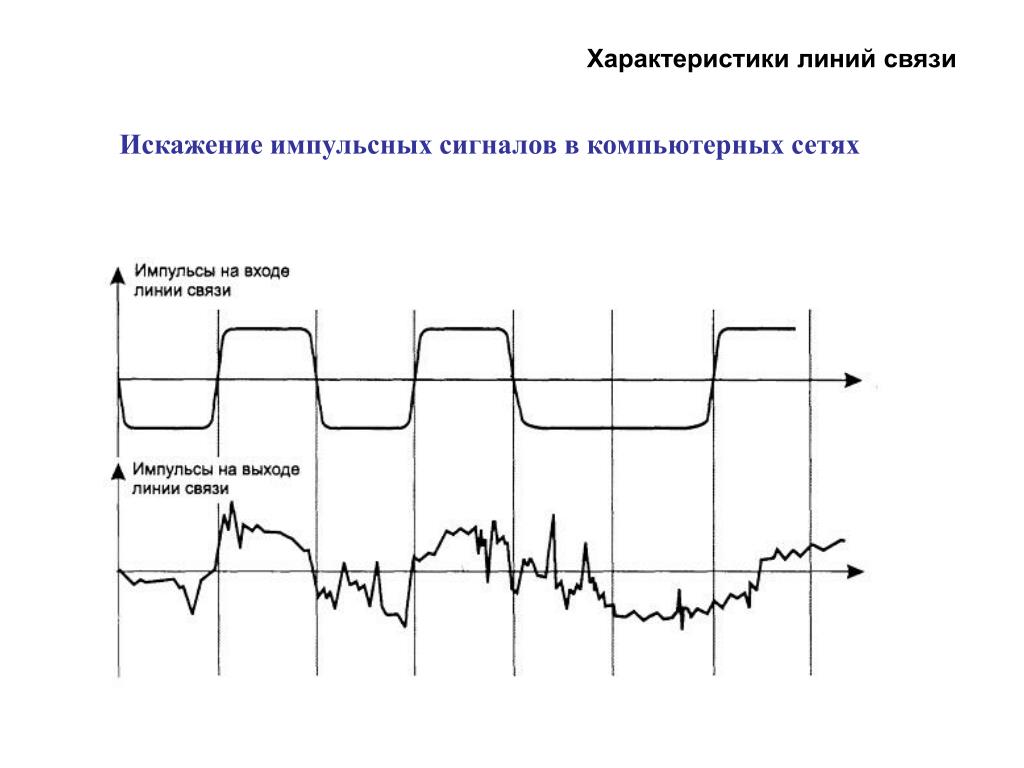 На следующей диаграмме показано, как связаны эти проблемы.
На следующей диаграмме показано, как связаны эти проблемы.
В следующих разделах описываются преобразования параметров и сигналов. Правила арифметических операций обсуждают арифметические операции.
Преобразование параметров
Параметры блоков с фиксированной точкой, которые принимают числовые значения, всегда преобразуются
от double к типу данных с фиксированной точкой. Параметры могут быть
преобразуется в тип входных данных, тип выходных данных или в тип данных явно
указывается блоком. Например, блок Discrete FIR Filter преобразует свой Начальные состояния параметра для типа входных данных и
преобразует его Коэффициент числителя Параметр к типу данных, который вы
явно указать через диалоговое окно блока.
Параметры всегда преобразуются перед выполнением любых арифметических операций.
Кроме того, параметры всегда преобразуются в автономном режиме с использованием
округление к ближайшему и насыщение.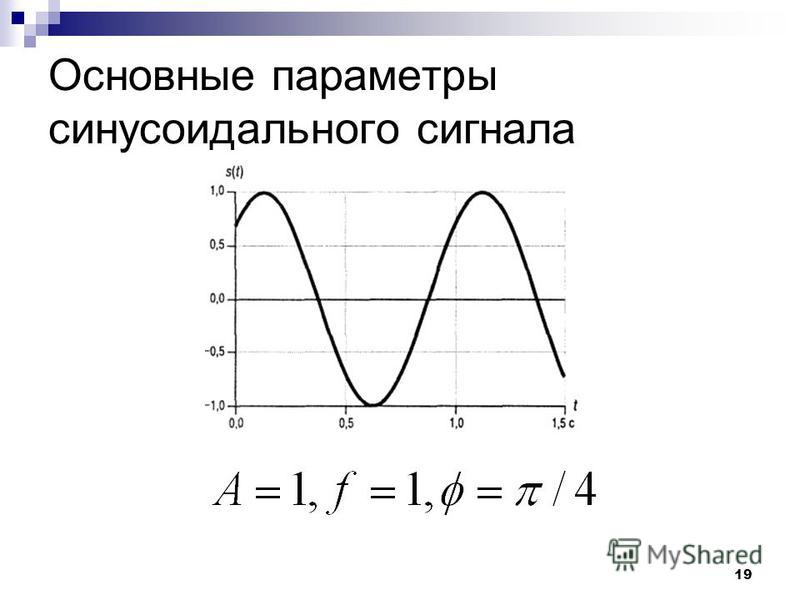 Офлайн-конверсии обсуждаются ниже.
Офлайн-конверсии обсуждаются ниже.
Офлайн-преобразования
Офлайн-преобразование — это преобразование, выполняемое вашей платформой разработки (например, процессор на вашем ПК), а не процессор с фиксированной точкой вы ориентируетесь. Например, предположим, что вы используете ПК для разработки программы. для работы на процессоре с фиксированной точкой, и вам нужен процессор с фиксированной точкой для вычислить
y=(abc)u=Cu
снова и снова. Если a , b и c — постоянные параметры, это неэффективно для
процессор с фиксированной точкой для вычисления ab / c каждый раз. Вместо этого процессор ПК должен один раз вычислить ab / c в автономном режиме, а процессор с фиксированной точкой вычислит только C · u . Это устраняет две дорогостоящие арифметические операции с фиксированной запятой. операции.
операции.
Преобразование сигнала
Рассмотрим преобразование реального значения из одного типа данных с фиксированной точкой в другой. В идеале значения до и после преобразования равны.
Va=Vb,
, где В b — входное значение, а В a — выходное значение. Чтобы увидеть, как реализовано преобразование, два идеальных значения заменены общей схемой кодирования [Slope Bias], описанной в масштабе:
Vi=Fi2EiQi+Bi.
Решение для сохраненного целочисленного значения типа выходных данных, Q A получается:
QA = FBFA2EB -EAQB+BB — BAFA2 — EA = FS2EB -EAQB+BNET,
, где F S — это корректированный фракционный слен и B — это корректированный фракционный сзор и B . это чистое смещение. Офлайн-конверсии и онлайн-конверсии
и операции обсуждаются ниже.
Офлайн-конверсии
Оба F s и B net вычисляются в автономном режиме с использованием округления до ближайшего и насыщения. Затем B net сохраняется с использованием типа выходных данных, а F s сохраняется с использованием автоматически выбранного типа данных.
Онлайн-преобразования и операции
Остальные преобразования и операции выполняются онлайн процессором с фиксированной точкой, и зависит от наклоны и смещения для входных и выходных типов данных. Преобразования и операции задаются следующими шагами:
Начальное значение для Q a задается чистым смещением, B net :
Qa=Bnet.
Входное целочисленное значение, Q b , умножается на скорректированный наклон, F s :
QRawProduct=FsQb.

Результат шага 2 преобразуется в модифицированный тип выходных данных, где наклон равен единице, а смещение равно нулю:
QTemp=конвертировать(QRawProduct).
Это преобразование включает любой необходимый сдвиг битов, округление или обработка переполнения.
Выполняется операция суммирования:
Qa=QTemp+Qa.
Это суммирование включает любую необходимую обработку переполнения.

Оптимизация моделирования и сгенерированного кода
Обратите внимание, что максимальное количество преобразований и операций выполняется, когда наклоны и смещения входного сигнала и выходного сигнала отличаются (являются несовпадение). Если масштабирование этих сигналов идентично (совпадает), число операций уменьшается по сравнению с худшим (наиболее неэффективным) случаем. Например, когда вход имеет тот же дробный наклон и смещение, что и выход, только шаг 3 требуется:
Qa=конвертировать(Qb).
Эксклюзивное использование только двоичного масштабирования для входных и выходных сигналов сигналы — это распространенный способ устранения несовпадающих наклонов и смещений, а результаты в наиболее эффективных симуляциях и сгенерированном коде.
СИНХРОНИЗАЦИЯ СИГНАЛА НА ШНУРЕ
Полезно определить временные параметры сигнала светофора как принадлежащие к одной из двух категорий: временные параметры местного перекрестка и временные параметры скоординированной работы. Минимум фазы или время изменения желтого цвета являются примерами параметров времени локального пересечения. Длина цикла пересечения и смещение являются примерами временных параметров координации. Временных параметров локального пересечения гораздо больше, чем временных параметров координации. Фактически, большинство систем определяют только три временных параметра координации: длину цикла, смещение и разделение. В следующем разделе этого отчета описываются методы, которые можно использовать для установки параметров времени локального пересечения, а в следующем разделе рассматриваются параметры скоординированной операции.
Основные временные параметры практически одинаковы для всех управляемых контроллеров. Существуют тонкие различия между различными программными реализациями; например, контроллеры NEMA определяют функцию принудительного отключения как функцию «на кольцо», в то время как другие реализации определяют функцию принудительного отключения как функцию «на фазу». Это различие не имеет большого значения для инженера по дорожному движению, который отвечает за разработку новых планов светофоров. Эти различия, однако, очень важны, когда результаты процесса оптимизации синхронизации сигналов реализуются в конкретном контроллере. Многие новые контроллеры автоматически рассчитывают настройку принудительного отключения, как только инженер определяет разделение.
Поскольку в большинстве юрисдикций используются приводные контроллеры NEMA TS-1 и TS-2 или модели 170, основное внимание уделяется контроллерам, приводимым в действие по времени. Однако важно понимать, что во многих юрисдикциях используются контроллеры с предварительной синхронизацией. Большинство принципов, отмеченных в этом разделе, могут быть непосредственно применены к контроллерам с предварительной синхронизацией.
Большинство принципов, отмеченных в этом разделе, могут быть непосредственно применены к контроллерам с предварительной синхронизацией.
Чтобы узнать о текущем статусе синхронизации сигналов, читатель может обратиться к Практика и процедуры синхронизации сигналов: состояние практики (элемент IR-116), опубликованный Институтом инженеров транспорта (ITE). В этом отчете отражено текущее положение дел в области синхронизации сигналов светофора. Он был подготовлен в рамках продолжающейся программы, разработанной FHWA и ITE, чтобы уделять повышенное внимание качеству синхронизации сигналов светофора в США.
Принципы синхронизации
Некоторые из основных принципов синхронизации зеленого интервала в блоке управления дорожным движением:
Каждая фаза должна иметь минимальное время зеленого сигнала, чтобы у остановившегося транспортного средства, получившего зеленый сигнал, было достаточно времени, чтобы тронуться с места и частично пересечь перекресток до появления желтого сигнала.
Каждому транспортному средству требуется достаточное количество зеленого времени, чтобы проехать от детектора до перекрестка. Это называется временем прохождения, удлинением транспортного средства или зазором. Промежуток относится к расстоянию между транспортными средствами, а также времени между транспортными средствами. Таким образом, каждое последующее срабатывание транспортного средства увеличивает время зеленого цвета фазы. При отсутствии встречных вызовов контроллер отдыхает. Расширения по-прежнему рассчитаны по времени, но не влияют на зеленый интервал.
Должно быть максимальное время, на которое зеленый интервал может быть продлен, если встречные машины ждут; это называется максимальным зеленым или пределом расширения.
После получения срабатывания от противоположной фазы запускается таймер максимального зеленого цвета. Текущая фаза будет удерживать зеленый цвет до тех пор, пока время между активациями не превысит предустановленное расширение блока или промежуток.
Активация от другой фазы, полученная в течение любой части зеленого интервала, также запускает схему синхронизации максимального зеленого. Это также называется пределом расширения. Даже если срабатывания достаточно близки по времени, чтобы предотвратить завершение промежутка, максимальный предел прекратит зеленый интервал, когда истечет заданный максимум. Это называется завершением по максимальному зеленому цвету или max-out.
 Это время иногда называют начальной частью зеленого интервала.
Это время иногда называют начальной частью зеленого интервала. При обнаружении разрыва начнется желтый интервал замены, и контроллер перейдет к следующей фазе в соответствии с запросом. Это называется прекращением разрывом или разрывом.
При обнаружении разрыва начнется желтый интервал замены, и контроллер перейдет к следующей фазе в соответствии с запросом. Это называется прекращением разрывом или разрывом.Основные настройки фазы активации
Все контроллеры с активацией поддерживают эти пять основных параметров синхронизации фазы: минимум зеленого, расширение, максимум зеленого, желтого и красного.
Минимальный зеленый (начальный)
Минимальный зеленый цвет – это первая хронометрируемая часть зеленого интервала.
Термин «минимум зеленый» на некоторых контроллерах называется «минимальный начальный». Есть тонкая разница. Минимальный зеленый цвет определяет продолжительность зеленого цвета, когда нет расширений. Когда контроллер использует минимальное начальное значение, минимальная продолжительность зеленого цвета равна сумме минимального начального значения и одного продления.
Минимальное время зеленого цвета — это минимально гарантированный зеленый цвет, который будет отображаться. Он установлен для того, чтобы транспортные средства, остановившиеся между датчиком на подъезде и стоп-линией, могли тронуться с места и выехать на перекресток.
Необходимо также учитывать время пешеходов. При отсутствии условий для пешеходов (указатели или кнопки) минимальный гарантированный зеленый цвет должен быть равен минимальному времени для пешеходов (прогулка + расстояние для пешеходов).
Один из методов, который можно использовать для расчета минимального количества гринов:
Минимум зеленый = 5 + 2n
Где:
«n» — количество транспортных средств, которое может храниться между стоп-линией и дальним датчиком в одной полосе. Это определяется путем деления расстояния (в футах) между стоп-линией и детектором на 25, поскольку 25 — это средняя длина транспортного средства плюс расстояние до остановки в футах.
При использовании определения стоп-линии минимальная зеленая полоса может быть довольно короткой, скажем, от 5 до 10 секунд. Эти очень короткие минимумы можно использовать на участках, где нет движения пешеходов, и на участках, где есть активированные пешеходные сигналы. Эти чрезвычайно короткие минимумы никогда не должны использоваться там, где есть вероятность перехода пешеходов с зеленым дисплеем.
Расширение (проход)
Параметр «Продление» (проезд) увеличивает зеленый интервал для каждого срабатывания автомобиля до максимального зеленого. Он начинает отсчет времени, когда транспортное средство снимается; то есть, когда транспортное средство проезжает над детектором. Этот период продления может быть прекращен таймером максимального продления или принудительным отключением.
Параметр фактического времени прохождения (удлинение транспортного средства или время промежутка) — это время, на которое фаза будет продлеваться при каждом срабатывании.
Если интервал проезда слишком короткий, это может привести к быстрой остановке, а также к прекращению действия грина до того, как движение транспортных средств будет надлежащим образом обслужено. Если установлен слишком длинный интервал проезда, это приведет к чрезмерным задержкам, а также к проблемам с безопасностью из-за неправильно рассчитанных интервалов между последними автомобилями.
Время прохождения рассчитывается следующим образом:
Время прохождения = Д/С
Где:
D — расстояние от стоп-линии до детектора в футах
S — скорость на подходе в футах в секунду.
Максимум Зеленый
Этот параметр времени определяет максимальное время, в течение которого фаза может быть зеленой при наличии конфликтующего вызова. Если конфликтующего вызова нет, он будет сбрасываться до тех пор, пока не произойдет встречный вызов.
Таймер максимального зеленого обычно блокируется во время скоординированной работы, когда максимальное время фазы определяется принудительным отключением фазы. Для большинства активированных фаз максимальное количество зеленого цвета следует рассматривать как ограничение безопасности, что-то, что заставляет фазу завершиться в условиях непрерывного спроса.
Желтый
Желтый интервал следует за зеленым интервалом в конце каждой фазы. Желтый интервал также называется интервалом «изменения» и определяет продолжительность желтого дисплея для этой фазы. Интервал изменения фазы сообщает водителям, что их фаза истекла, и они должны: (1) сделать безопасную остановку до стоп-линии или (2) проехать через перекресток, если они находятся слишком близко к перекрестку, чтобы остановиться.
Следующее уравнение обычно используется для определения надлежащего интервала замены:
Желтое время = t + S / (2a +-64,4 g)
Где:
t — время восприятия/реакции водителя в секундах (обычно 1,0 секунды).
S скорость на подходе в футах в секунду.
a — скорость замедления в футах в секунду (обычно берется 10 футов в секунду в квадрате).
g = оценка приближения, процент оценки, деленный на 100 (добавьте для повышения и вычтите для понижения).
Красный
Красный интервал очистки (также известный как полностью красный интервал) следует за желтым интервалом каждой фазы. Он должен истечь, прежде чем можно будет начать следующую фазу последовательности.
Время красного = (W + L) / S
Где:
W — ширина пересечения в футах.
L — длина транспортного средства в футах (обычно принимается за 20 футов).
S — скорость на подходе в футах в секунду.
 Продолжительность минимального зеленого цвета обычно зависит от количества транспортных средств, которые могут стоять в очереди между входным фазовым детектором и стоп-линией. Как правило, продолжительность фазы не должна быть меньше некоторого абсолютного минимума, например, от 5 до 10 секунд. Если пешеходы могут переходить дорогу с этой фазой, время их перехода также должно быть учтено и включено в минимальную продолжительность фазы.
Продолжительность минимального зеленого цвета обычно зависит от количества транспортных средств, которые могут стоять в очереди между входным фазовым детектором и стоп-линией. Как правило, продолжительность фазы не должна быть меньше некоторого абсолютного минимума, например, от 5 до 10 секунд. Если пешеходы могут переходить дорогу с этой фазой, время их перехода также должно быть учтено и включено в минимальную продолжительность фазы. Следовательно, время этого интервала зависит от местоположения детектора и количества транспортных средств, которые могут храниться между детектором и стоп-линией.
Следовательно, время этого интервала зависит от местоположения детектора и количества транспортных средств, которые могут храниться между детектором и стоп-линией.
 Эта настройка представляет собой количество секунд, необходимое транспортному средству, движущемуся со скоростью приближения, для проезда от детектора до стоп-линии. Время прохождения служит двум целям: (1) это время прохождения от детектора до стоп-линии, и (2) это допустимый промежуток времени между активациями, при котором грин остается на этом подходе. Пока обнаружение транспортных средств происходит с более короткими интервалами, чем время проезда (допустимый промежуток), зеленый цвет будет сохраняться на этой фазе до тех пор, пока не истечет максимум или он не будет принудительно отключен.
Эта настройка представляет собой количество секунд, необходимое транспортному средству, движущемуся со скоростью приближения, для проезда от детектора до стоп-линии. Время прохождения служит двум целям: (1) это время прохождения от детектора до стоп-линии, и (2) это допустимый промежуток времени между активациями, при котором грин остается на этом подходе. Пока обнаружение транспортных средств происходит с более короткими интервалами, чем время проезда (допустимый промежуток), зеленый цвет будет сохраняться на этой фазе до тех пор, пока не истечет максимум или он не будет принудительно отключен.
 Не существует общепринятой практики определения оптимальной настройки. Некоторые инженеры считают, что все фазы должны иметь одинаковые ограничения, такие как: 120 секунд для основных сквозных фаз, 90 секунд для второстепенных сквозных фаз и 60 секунд для фаз левого поворота. Другие устанавливают фазовые максимумы, пропорциональные спросу в критический период. Например, можно рассчитать разделение фаз с помощью метода критического движения, а затем установить максимальное значение зеленого цвета на 50 процентов выше, чем разделение фаз.
Не существует общепринятой практики определения оптимальной настройки. Некоторые инженеры считают, что все фазы должны иметь одинаковые ограничения, такие как: 120 секунд для основных сквозных фаз, 90 секунд для второстепенных сквозных фаз и 60 секунд для фаз левого поворота. Другие устанавливают фазовые максимумы, пропорциональные спросу в критический период. Например, можно рассчитать разделение фаз с помощью метода критического движения, а затем установить максимальное значение зеленого цвета на 50 процентов выше, чем разделение фаз.
 Обычно это одна-две секунды, но при заходах на посадку с более низкой скоростью нет ничего необычного в использовании очень короткой продолжительности от 0,0 до 0,5 секунд, поскольку желтое время от 3,0 до 4,0 секунд обеспечивает достаточное время для выполнения требований как по изменению, так и по разрешению. .
Обычно это одна-две секунды, но при заходах на посадку с более низкой скоростью нет ничего необычного в использовании очень короткой продолжительности от 0,0 до 0,5 секунд, поскольку желтое время от 3,0 до 4,0 секунд обеспечивает достаточное время для выполнения требований как по изменению, так и по разрешению. .Параметры пешеходов
Существует два параметра времени пешеходов: Walk и Flashing Don’t Walk (просвет для пешеходов). Там, где движение пешеходов происходит регулярно, пешеходам должно быть предоставлено достаточно времени, чтобы пересечь проезжую часть (MUTCD, раздел 4D. 03). Другими словами, если движение пешеходов не активировано, время, необходимое пешеходам для безопасного перехода дороги (сумма времени ходьбы и запрета ходьбы), будет определять минимальное время зеленого цвета для этой фазы. Когда предусмотрена кнопка нажатия пешеходом (приведение в действие), то при отсутствии нажатия пешеходом будут использоваться обычные минимальные значения для транспортных средств. Обратите внимание, что можно разработать сигнальный дизайн, в котором используется обнаружение пешеходов с помощью кнопок без использования дисплеев «Пешеход» и «Не иди».
03). Другими словами, если движение пешеходов не активировано, время, необходимое пешеходам для безопасного перехода дороги (сумма времени ходьбы и запрета ходьбы), будет определять минимальное время зеленого цвета для этой фазы. Когда предусмотрена кнопка нажатия пешеходом (приведение в действие), то при отсутствии нажатия пешеходом будут использоваться обычные минимальные значения для транспортных средств. Обратите внимание, что можно разработать сигнальный дизайн, в котором используется обнаружение пешеходов с помощью кнопок без использования дисплеев «Пешеход» и «Не иди».
Прогулка
Параметр Walk определяет продолжительность отображения сигнала ходьбы. В нормальных условиях интервал ходьбы составляет от 4 до 7 секунд. Это позволяет пешеходам иметь достаточную возможность покинуть бордюр до того, как будет показан интервал безопасного проезда. В особых случаях, например, на школьном перекрестке с большим количеством пешеходов, время ходьбы может превышать 7 секунд.
Мигает Не ходи
Параметр расстояния до пешеходов определяет продолжительность отображения мигающего сигнала «Не иди». Это время, необходимое пешеходу на пешеходном переходе, чтобы покинуть бордюр и выехать за пределы проезжей части (раздел 4E.02 MUTCD), прежде чем встречные транспортные средства получат зеленую индикацию.
Мигание «Не ходи» (пропуск для пешеходов) рассчитывается следующим образом:
Мигает, не ходите = W/S P
Где:
W — расстояние ходьбы (перехода) от бордюра до бордюра в футах.
S P — средняя скорость ходьбы в футах в секунду (обычно от 3,5 до 4 футов в секунду).
 Исследования показали, что очередь пешеходов из 24 и более человек может быть размещена за 7 секунд.
Исследования показали, что очередь пешеходов из 24 и более человек может быть размещена за 7 секунд.Настройки фазы объем-плотность
В 1950-х годах компания Automatic Signal представила два новых и сложных контроллера сигналов светофора, модель 1022 и модель 1033. Эти контроллеры имели гораздо больше схем синхронизации, чем любые контроллеры, использовавшиеся до или после. Хотя все временные параметры были хорошо обоснованы в теории; на практике многие фактически не улучшили работу перекрестка. Для этого было несколько причин: невозможно было определить, какой из множества таймеров фактически вызвал завершение определенной фазы; технология аналоговых схем синхронизации, доступная в то время, подвергалась изменениям в зависимости от температуры и влажности; и, как и сегодня, у немногих инженеров было время, необходимое для тонкой настройки операции. Из многих функций этих инновационных контроллеров две функции (переменное начальное значение и уменьшение зазора) были усовершенствованы и обычно доступны в современных контроллерах. Эти две особенности объясняются ниже.
Эти контроллеры имели гораздо больше схем синхронизации, чем любые контроллеры, использовавшиеся до или после. Хотя все временные параметры были хорошо обоснованы в теории; на практике многие фактически не улучшили работу перекрестка. Для этого было несколько причин: невозможно было определить, какой из множества таймеров фактически вызвал завершение определенной фазы; технология аналоговых схем синхронизации, доступная в то время, подвергалась изменениям в зависимости от температуры и влажности; и, как и сегодня, у немногих инженеров было время, необходимое для тонкой настройки операции. Из многих функций этих инновационных контроллеров две функции (переменное начальное значение и уменьшение зазора) были усовершенствованы и обычно доступны в современных контроллерах. Эти две особенности объясняются ниже.
Начальная переменная
Чтобы успешно использовать функции объемной плотности контроллера, необходимо, чтобы обнаружение фазы располагалось выше по течению, чем обычно.
Добавлено начальное значение — этот интервал совпадает с минимальным зеленым интервалом. Значение представляет собой количество времени, которое добавляется при получении каждого срабатывания транспортного средства в течение начального периода. Фактическое минимальное время зеленого цвета, используемое контроллером, больше минимального зеленого времени или добавленной начальной суммы.
Максимальное начальное значение — это максимальный период времени, на который добавленное начальное значение может продлить начальный зеленый период. Максимальный начальный не может быть меньше минимального зеленого.
Уменьшение зазора
Уменьшение зазора — еще одна устаревшая концепция, используемая в современном контроллере. Этот параметр используется для того, чтобы позволить логике «поиска промежутка» активированного контроллера идентифицировать меньший промежуток в трафике, чтобы оправдать завершение фазы раньше, чем это подразумевается временем прохождения. Сокращение промежутка — это средство сокращения времени проезда или промежутка на основе времени, в течение которого встречные транспортные средства находились в ожидании.
Time-Before-Reduction — Этот период начинается, когда фаза становится зеленой и на конфликтующей фазе есть обслуживаемый вызов. По завершении этого периода начинается линейное сокращение времени прохождения.
Time-To-Reduce — Этот период начинается, когда заканчивается Time-Before-Reduction, и управляет линейной скоростью уменьшения до тех пор, пока Gap не уменьшится до минимального Gap.
Минимальный зазор —Как и время проезда, этот параметр расширяет зеленый интервал на минимальное время промежутка для каждого срабатывания транспортного средства до максимального зеленого.
 Это позволяет контроллеру пробовать трафик на подходе с минимальным влиянием стоячей очереди. Обнаружение на расстоянии от 300 до 400 футов вверх по течению от стоп-линии является типичным при работе с объемной плотностью. При обнаружении так далеко, минимальный зеленый будет довольно длинным — 35 секунд с детектором на расстоянии 400 футов. Поскольку минимальная зеленая длина такой продолжительности приведет к очень медленной работе при небольшом спросе, для смягчения этих последствий используются две другие схемы синхронизации: добавленная начальная и максимальная начальная.
Это позволяет контроллеру пробовать трафик на подходе с минимальным влиянием стоячей очереди. Обнаружение на расстоянии от 300 до 400 футов вверх по течению от стоп-линии является типичным при работе с объемной плотностью. При обнаружении так далеко, минимальный зеленый будет довольно длинным — 35 секунд с детектором на расстоянии 400 футов. Поскольку минимальная зеленая длина такой продолжительности приведет к очень медленной работе при небольшом спросе, для смягчения этих последствий используются две другие схемы синхронизации: добавленная начальная и максимальная начальная. Добавленный начальный уровень не может превышать максимальный начальный. Добавленный начальный параметр позволяет варьировать продолжительность минимума между фактическим минимумом и временем, необходимым для разрядки максимальной очереди, которая может храниться между стоп-линией и детектором.
Добавленный начальный уровень не может превышать максимальный начальный. Добавленный начальный параметр позволяет варьировать продолжительность минимума между фактическим минимумом и временем, необходимым для разрядки максимальной очереди, которая может храниться между стоп-линией и детектором.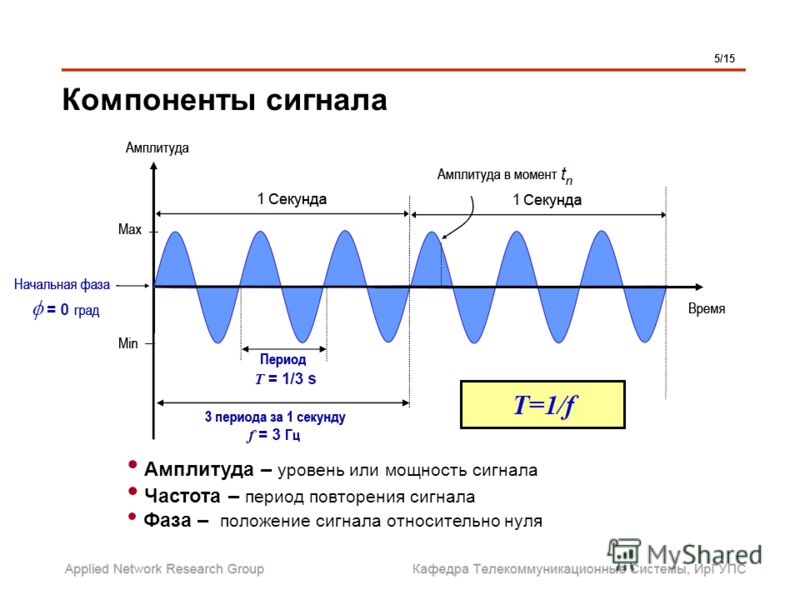 По сути, это приносит пользу ожидающим транспортным средствам, сокращая время, допустимое между транспортными средствами, прибывающими на зеленую фазу, прежде чем эта фаза будет завершена. С функцией уменьшения зазора связаны три временных параметра: время до сокращения, время до уменьшения и минимальный зазор.
По сути, это приносит пользу ожидающим транспортным средствам, сокращая время, допустимое между транспортными средствами, прибывающими на зеленую фазу, прежде чем эта фаза будет завершена. С функцией уменьшения зазора связаны три временных параметра: время до сокращения, время до уменьшения и минимальный зазор. Он начинает отсчет времени, когда привод транспортного средства удаляется. Этот период продления может быть прекращен максимальным зеленым или принудительным отключением.
Он начинает отсчет времени, когда привод транспортного средства удаляется. Этот период продления может быть прекращен максимальным зеленым или принудительным отключением.Сводка параметров синхронизации контроллера
Обычно используются 12 параметров синхронизации контроллера:
ХОДЬБА — устанавливает длину интервала ХОДЬБА.
ДОСТУП ДЛЯ ПЕДАГ — устанавливает продолжительность мигающего интервала «НЕ ХОДИТЕ».
MINIMUM GREEN — устанавливает длину начального состояния зеленого интервала.
ВРЕМЯ ПРОЕЗДА — устанавливает приращение продления времени преимущественного проезда (зеленый) для каждого срабатывания транспортного средства в течение зеленого интервала.
MAXIMUM GREEN — устанавливает максимальный предел, до которого может быть расширен зеленый интервал на фазе при наличии обслуживаемого запроса на конфликтующей фазе.
ДОБАВЛЕНО НАЧАЛЬНОЕ — Функция плотности. Устанавливает количество секунд, на которое каждое транспортное средство (приведение в действие) увеличивает начальное состояние зеленого цвета в незеленое время на фазе 9.0007
MAXIMUM INITIAL — Функция плотности. Устанавливает максимальный предел, до которого может быть увеличен начальный интервал на фазе.
СНИЖЕНИЕ ВРЕМЕНИ B4 — Функция плотности. Устанавливает предустановленное время до того, как разрешенный промежуток (время прохода) начнет уменьшаться.
ВРЕМЯ УМЕНЬШИТЬ—Функция плотности. Устанавливает время, в течение которого разрешенный зазор уменьшается от времени прохода до минимального зазора после того, как время до истечения времени до истечения времени сокращения.