
Atmega8 шим
Рассмотрим настройку ШИМ на микроконтроллере Atmega8. На микроконтроллере Atmega8 существуют три выхода которые можно использовать в качестве «ШИМа» это выводы с 1 по 3-й порта B. В нашем случае мы настраиваем первый вывод порта. Ширина или длительность импульса на нем будет зависеть от значения, которое записано в регистр сравнения OCR1A.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- AVR Урок 13. ШИМ. Мигаем светодиодом плавно. Часть 1
- Архитектура AVR в примерах/Широтно-импульсный модулятор
- Энкодер + Программный шим + atmega8
- Шим atmega8
- ШИМ не обновляется в atmega8
- Программный шим atmega8
- Primary Menu
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Atmega8 ШИМ управление мотором постоянного тока
AVR Урок 13. ШИМ. Мигаем светодиодом плавно. Часть 1
ШИМ широтно-импульсная модуляция — процесс управления мощностью, которая подводится к нагрузке, при помощи изменения скважности импульсов, при фиксированной частоте. В этой статье описывается пример реализации на микроконтроллере ATmega8.
Приступим теперь к самой реализации. Для начала нам потребуется электрическая схем. Как видно схема весьма простая. Напряжение на выходе ШИМ снимается с конденсатора C. Сопротивление R резистора должно быть много меньше входного сопротивление последующей цепи, которой будет управлять эта ШИМ, чтобы минимизировать влияние этого входного сопротивления на амплитуду пульсаций и на постоянную составляющую выходного напряжения.
Код тоже очень простой. Состоит всего из 3-х инструкций на языке C. В документации на микроконтроллер AVR подробно описаны все режимы, а также как рассчитывается тактовая частота.
Коэффициент заполнения регулируется простой записью в регистр OCR2. Сразу после записи он меняется в соответствии с числом, которое туда записано.
Как известно, постоянная составляющая напряжения на выходе ШИМ пропорциональна коэффициенту заполнения. Таким образом, получается управление напряжением в диапазоне от 0 до Vcc. ШИМ используют, например, для регулировки яркости подсветки ЖК дисплеев, для регулировки скорости вращения электрического двигателя, для регулировки громкости в автомагнитолах. Эту схему, в частности, вы можете использовать в перечисленных и других областях электроники. Ваш e-mail не отображается в списке сообщений.
Leave this field empty. RU — надежный хостинг! Версия для печати. Рекомендованный контент Оптическое распознавание символов на микроконтроллере.
RU — надежный хостинг! Версия для печати. Рекомендованный контент Оптическое распознавание символов на микроконтроллере.
Нажмите, чтобы отменить ответ. Новости Народный смартфон с квадрокамерой Redmi Note 8 вышел за пределы Китая На что способен АК экстремальный тест нового автомата Калашникова Intel представила новую линейку процессоров Xeon W Они значительно дешевле ранних моделей, но все еще на 14 нм Call of Duty: Mobile бьет рекорды — миллионов загрузок за первую неделю Сломали систему.
Сервисы и приложения Google работают на Honor 9X, хотя этот смартфон никогда не сертифицировался 64 Мп, всплывающая камера, подсветка сканера, Snapdragon и Android 10 за евро.
Актуальные темы. RU Все права на материалы принадлежат их авторам. Основными материалами сайта являются архивные копии материалов по ИТ тематике Рунета, взятые из открытых и общедоступных источников.
Архитектура AVR в примерах/Широтно-импульсный модулятор
ШИМ широко применяется для цифро-аналогового преобразования, генерации сигналов произвольной формы, регулирования. Флаг TOV0 автоматически очищается при выполнении процедуры прерывания. Для счетчика TCNT0 определены 3 специальных значения, по которым могут происходить определенные события:. TCNT0 может считать как вверх инкрементироваться , так и вниз декрементироваться. Это определяется выбранным режимом работы.
Флаг TOV0 автоматически очищается при выполнении процедуры прерывания. Для счетчика TCNT0 определены 3 специальных значения, по которым могут происходить определенные события:. TCNT0 может считать как вверх инкрементироваться , так и вниз декрементироваться. Это определяется выбранным режимом работы.
atmega8 ШИМ + Динамик + Сервопривод SG Данная статья написана скорее для себя, или как веселый эффектный эксперемент с ШИМ на atmega8.
Энкодер + Программный шим + atmega8
Широтно-импульсная модуляция pulse width modulation, PWM часто используется в цифровой технике. Особенность этого способа модуляции заключается в том, что он позволяет регулировать постоянную составляющую выходного сигнала средствами логических элементов. Другими словами можно изменять яркость светодиодов, скорость вращения коллекторных двигателей, температуру нагревателей и т. Временная диаграмма ШИМ-сигнала:. На нашей плате TutorShield есть трехцветный светодиод. Для возможности управления им, установите перемычку «color» так, как показано на рисунке. Всех остальных перемычек быть не должно. У микроконтроллера есть встроенные таймеры, которые и управляют формированием ШИМ-сигнала. Для использования достаточно правильно настроить таймер и затем для формирования сигнала потребуется только изменять состояние одного регистра.
Всех остальных перемычек быть не должно. У микроконтроллера есть встроенные таймеры, которые и управляют формированием ШИМ-сигнала. Для использования достаточно правильно настроить таймер и затем для формирования сигнала потребуется только изменять состояние одного регистра.
Шим atmega8
Вот уже несколько раз я ругался странным словом ШИМ. Пора бы внести ясность и разьяснить что же это такое. Вообще, я уже расписывал этот режим работы , но все же повторюсь в рамках своего курса. Вкратце, Широтно Импульсная Модуляция в буржуйской нотации этот режим зовется PWM — Pulse Width Modulation это способ задания аналогового сигнала цифровым методом , то есть из цифрового выхода, дающего только нули и единицы получить какие то плавно меняющиеся величины.
Стенд представляет собой управляемый двухканальный генератор сигналов ШИМ с управляемой скважностью. Контроллер стенда построен на основе ATMega 8.
ШИМ не обновляется в atmega8
By balistik , August 23, in МК для начинающих.![]() Всем доброго времени суток. Могу более-менее понять чужой код и из кусков сделать целое. Я выложу пример кода. Собираю все вместе — не работает. Пробовал в Протеусе, тоже глючит, да и протеус тормозит.
Всем доброго времени суток. Могу более-менее понять чужой код и из кусков сделать целое. Я выложу пример кода. Собираю все вместе — не работает. Пробовал в Протеусе, тоже глючит, да и протеус тормозит.
Программный шим atmega8
Решил научиться управлять 4-х контактными кулерами, для этого необходим ШИМ с частотой 25 кГц. Разбираемся, реализуем требуемое. Проверить, что при помощи настроенной схемы можно управлять вентиляторами. Не имею профильного образования по работе с МК, в данный момент самостоятельно изучаю данное направление. Как следствие решение может содержать некоторые не точности. Как обычно расписывать много теории не буду, благо много информации в интернетах и есть документация от производителя далее по тексту буду ссылаться на эту документацию с указанием номеров страниц и таблиц. По условиям задачи необходимо реализовать 2 канала, в ATmega P можно реализовать двумя способами:. Свободные таймеры всегда пригодятся, потому будем использовать вариант с одном таймером, да и смотрится он красивее.
Широтно-импульсная модуляция (pulse width modulation, PWM) . на выводе OC1A, который в микроконтроллере Atmega8 подключен к.
Primary Menu
Вернуться в Микроконтроллеры. Сейчас этот форум просматривают: Google [Bot] и гости: 1. Разработка и изготовление печатных плат для модулей.
Здравствуйте дорогие читатели. В прошлый раз мы рассмотрели применение контроллера для проверки реле. В этой статье разберем работу самого контроллера. Рассмотрим процесс генерирования.
Re: пассики для проигрывателей винила Re: Динамическая индикация на LCD дисплее
ШИМ широтно-импульсная модуляция — процесс управления мощностью, которая подводится к нагрузке, при помощи изменения скважности импульсов, при фиксированной частоте. В этой статье описывается пример реализации на микроконтроллере ATmega8. Приступим теперь к самой реализации. Для начала нам потребуется электрическая схем. Как видно схема весьма простая. Напряжение на выходе ШИМ снимается с конденсатора C.
Сегодня мы изучим возможность использования широтно-импульсной модуляции в микроконтроллере AVR , или, как говорят в народе, ШИМ. В технической документации мы будем видеть чаще аббревиатуру PWM или pulse-width modulation , что преводится имено также. ШИМ — это управление свечением светодиодов, вращением двигателей, и прочими устройствами необычным способом, при котором данное управление осуществляется не приложенным напряжением к контактам, а квадратными импульсами.
В технической документации мы будем видеть чаще аббревиатуру PWM или pulse-width modulation , что преводится имено также. ШИМ — это управление свечением светодиодов, вращением двигателей, и прочими устройствами необычным способом, при котором данное управление осуществляется не приложенным напряжением к контактам, а квадратными импульсами.
ATMega8 / Широтно-импульсная модуляция (ШИМ)
Документация
Таймер T/C1 устроен сложнее T/C0 и содержит дополнительные регистры.
TCNT1 — счётный регистр
TCCR1A — регистр управления, определяет поведение выводов OC1A и OC1B (биты 1 и 2 порта B) при совпадении значений в регистре с TCNT1A и регистрах сравнения OCR1A/OCR1B, а также для выборов режимов ШИМ
TCCR1B — регистр управления
ICR1 — в этот регистр записывается текущее состояние счётчика при появлении активного входного сигнала на выводе ICP (бит 0 порта B)
OCR1A,OCR1B — содержимое этих регистров постоянно сравнивается с содержимым счётного регистра TCNT1. В случае совпадения выполняются действия, определённые регистром TCCR1A
В случае совпадения выполняются действия, определённые регистром TCCR1A
Регистр TCCR1A
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| COM1A1 | COM1A0 | COM1B1 | COM1B0 | — | — | PWM11 | PWM10 |
Биты COM1A1/COM1A0 и COM1B1/COM1B0 определяют поведение выводов OC1A/OC1B при совпадении значений регистров сравнения OCR1A/OCR1B со значением счётного регистра TCNT1. Возможные состояния битов показаны в таблице (случай для отключённого ШИМ)
| COM 1×1 | COM 1×0 | Действие при совпадении |
|---|---|---|
| 0 | 0 | нет реакции |
| 0 | 1 | Состояние на выходе OC1x меняется на противоположное |
| 1 | 0 | На выходе OC1x установится лог.0 |
| 1 | 1 | На выходе OC1x установится лог. |
Если в регистре TCCR1A включён широтно-импульсный модулятор, то счётчик Т/C1 работает как суммирующий и вычитающий счётчик, выполняя циклические переходы от значения 0x0000 до значения MAX и обратно до 0x0000. Число MAX рассчитывается по формуле:
MAX=2N-1,
где N — разрешающая способность ШИМ, заданная битами PWM10 и PWM11 регистра TCCR1A.
Частота fшим, с которой повторяются циклы ШИМ рассчитывается по формуле:
fшим=ft/c1/(MAX)
Частота ft/c1 выбирается при помощи битов CS10-CS12 регистра TCCR1B
Регистр TCCR1B
| 7 | 6 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|
| ICNC1 | ICES1 | — | — | CTC1 | CS12 | CS11 | CS10 |
Биты 0-2 используются для выбора частоты тактирования (см. таблицу в разделе таймеры atmega8).
таблицу в разделе таймеры atmega8).
Если CTC1=1, то таймер возвращается в состояние 0x0000 по импульсу, следующему после совпадения счётчика и регистра сравнения OCR1A
Регистр ICES1 определяет каким образом должно передаваться состояние счётчика в регистр захвата ICR1 — по нарастающему (ICES1=1) или ниспадающему фронту сигнала (ICES1=0).
Бит ICNC1 активирует подавление помех.
| PWM10 | PWM11 | Разрешающая способность | Значение MAX | Частота ШИМ |
|---|---|---|---|---|
| 0 | 0 | Режим ШИМ выключен | ||
| 0 | 1 | 8 бит | 255 | ft/c1/255 |
| 1 | 0 | 9 бит | 511 | ft/c1/511 |
| 1 | 1 | 10 бит | 1023 | ft/c1/1023 |
При включенном режиме ШИМ поведение выходов OC1A/OC1B при совпадении значений в регистрах сравнения и счётном регистре TCNT1 задаётся битами COM1A1/COM1A0 и COM1B1/COM1B0 регистра TCCR1A следующим образом:
| COM 1×1 | COM 1×0 | Действие при совпадении |
|---|---|---|
| 0 | 0 | На выходе OC1x нет сигнала |
| 0 | 1 | На выходе OC1x нет сигнала |
| 1 | 0 | Неинвертирующий широтно-импульсный модулятор. При суммирующем подсчёте на выводе кстанавливается лог.0, при вычитающем — лог.1 При суммирующем подсчёте на выводе кстанавливается лог.0, при вычитающем — лог.1 |
| 1 | 1 | Инвертирующий широтно-импульсный модулятор. При суммирующем подсчёте на выводе кстанавливается лог.1, при вычитающем — лог.0 |
Если у вас есть какие-то замечания по этому документу или что-то осталось непонятно, то вы можете оставить свой отзыв или вопрос
Анонимная отправка сообщений запрещена! Пожалуйста зарегистрируйтесь
[PDF] ШИМ В АРН. Разработчик: Кришна Нанд Гупта Прашант Агравал Маюр Агарвал
1 ШИМ В AVR Разработано: Кришна Нанд Гупта Прашант Агравал Маюр Агарвал2 ШИМ (широтно-импульсная модуляция) Что такое ШИМ? …
PWM IN AVR
Разработчик: Krishna Nand Gupta Prashant Agrawal Mayur Agarwal
PWM (широтно-импульсная модуляция)
is io n
Частота = (1/T) Рабочий цикл = (Thigh/T)
R ob
о.![]()
co
m
Что такое ШИМ?
Для чего нужен ШИМ?
.V
Я отвечу на этот вопрос в отношении нашего РОБОТА, здесь у вас есть двигатель на 300 об/мин, а номинальное напряжение составляет 12 вольт, так что если вы хотите запустить двигатель на 150 об/мин, то что вы будете делать?? Уменьшите напряжение до 6 вольт, но это не очень хорошая идея. Число оборотов в минуту не является линейной функцией напряжения, и по мере снижения напряжения от указанного значения крутящий момент также будет уменьшаться. Итак, вот концепция ШИМ. Что вы можете сделать, так это то, что вы можете многократно включать и выключать двигатель, так что фактически вы получаете 50% времени включения, если вы делаете это достаточно быстро, тогда кажется, что двигатель работает непрерывно.
w
Как PWM реализован в AVR?
w
w
Что именно вам нужно? Прямоугольная волна с постоянным периодом времени, рабочим циклом которой мы можем управлять в коде, верно? Тактовый период микроконтроллера:
Tclk =1/(тактовая частота) ~ 1 ~
В ATmega 8 тактовая частота по умолчанию составляет около 1 мегагерца.
Tsystem-clk=1/(1MHz)=1 мкс Чтобы получить желаемую частоту, вам нужно изменить тактирование таймера, которое выполняется прескалером, так что
m
Tclk = предварительный делитель * Tsystem-clk
R ob
o.
co
Для реализации ШИМ необходимы следующие переменные: TOP= количество тактовых циклов для одного периода времени ШИМ Nt=T/Tclk OCR = количество тактовых циклов для включения PWM OCR (выходное сравнение = регистр T на OCR) /Tclk Timer_value= Это значение таймера, которое считает от TOP до нуля и от нуля до TOP в каждом цикле.
** Для управления двигателем постоянного тока требуется двухфазный правильный ШИМ, этот сложный термин
— это io n
.означает только, что счетчик будет считать от TOP до нуля и от нуля до TOP за период времени. Таким образом, период времени
Период времени прямоугольной волны определяется двумя переменными • Tclk • TOP
.V
T= Tclk*TOP или T= Tclk*TOP *2
(двухфазный правильный ШИМ)
w
w
w
Мы настраиваем обе переменные, чтобы получить желаемый период времени, изменяя некоторые биты управления в управляющих регистрах.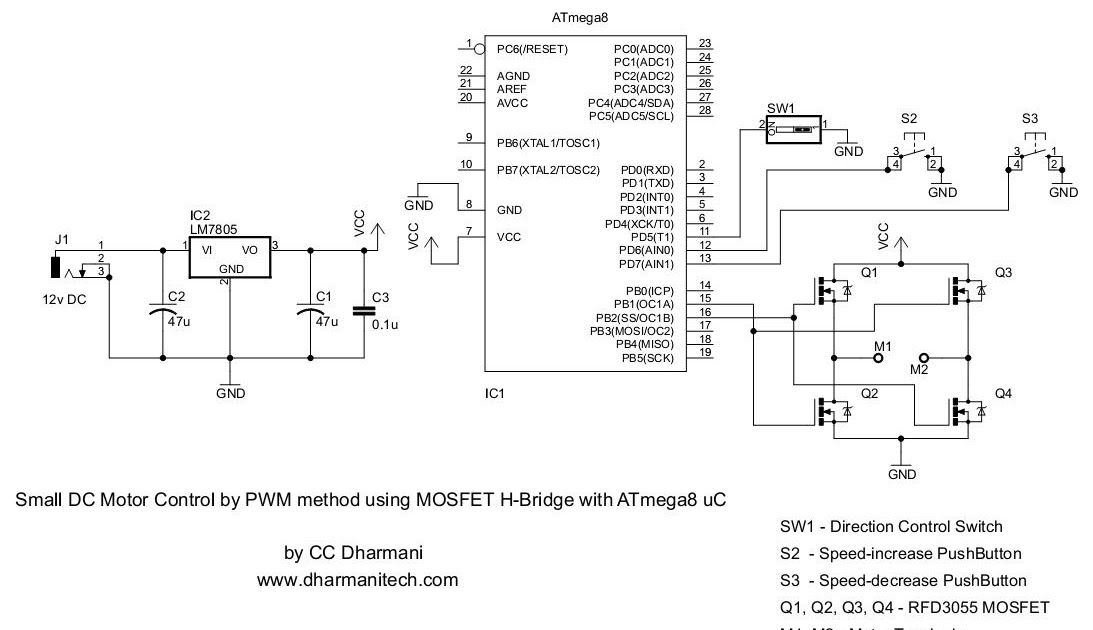 Здесь, в этом руководстве, мы установим TOP=255 Рабочий цикл определяется только одной переменной OCR Рабочий цикл = (OCR/TOP)
Здесь, в этом руководстве, мы установим TOP=255 Рабочий цикл определяется только одной переменной OCR Рабочий цикл = (OCR/TOP)
~ 2 ~
Рабочий цикл = (OCR/TOP) И
, если
Timer_value ≥ OCR Timer_value
затем
o.
CO
R OB
TOP
W
W
W
.V
IS IO N
Значение TIMER
~ 3 ~
PWM Выходная выходная сигнала = LOW PWM POWER PWM. Высокий
м
Когда если
м соо.
R ob
Вам должно быть интересно, где и где появится эта прямоугольная волна. В микроконтроллере avr есть определенные пины ШИМ, где эти волны появятся. Как и в ATmega8, контакты 15, 16 и 17. Если вы хотите управлять только двумя двигателями постоянного тока, то достаточно 15 и 16 контактов.
is io n
Теперь предположим, что вы хотите сгенерировать прямоугольную волну с рабочим циклом 50 % на контакте 15 (OC1A). Тогда как ваш код будет выглядеть так: Int main() { Шаг 1 Установите PB1 (OC1A) в качестве выходного контакта ;
Тогда как ваш код будет выглядеть так: Int main() { Шаг 1 Установите PB1 (OC1A) в качестве выходного контакта ;
Шаг 2 Включите ШИМ; Шаг 3 Выберите правильный по фазе режим PWM и значение TOP; Шаг 4 Установите значение OCR TOP/2; Шаг 5 Установите значение предварительного делителя и источник тактового сигнала; Шаг 6 Запустите ШИМ;
.V
w
w
While(1) {
//выполнить любую работу здесь
w
}
}
Теперь, если вы подключите осциллограф к контакту 15, вы увидите прямоугольную волну с рабочим циклом 50 %
~ 4 ~
☺
Вы изучили ШИМ, осталась только сумасшедшая синтаксическая часть настройки ШИМ AVR. ПРИМЕЧАНИЕ: для простоты этого руководства здесь я буду рассматривать только ШИМ с фазовой коррекцией, чтобы узнать больше о таймере и ШИМ, просмотрите техническое описание ATmega8
m
16-битный таймер/счетчик .
co
Таймер/счетчик 1 Регистр управления A – TCCR1A
• Бит 7:6 – COM1A1:0: Сравнить режим вывода для канала A • Бит 5:4 – COM1B1:0: Сравнить режим вывода для канала B
is io n
COM1A1:0 и COM1B1:0 управляют выходными контактами сравнения (OC1A и OC1B (соответственно)).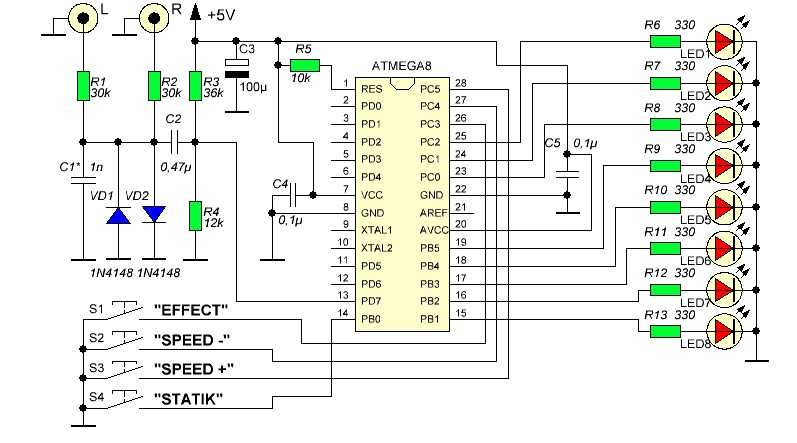 Функциональность порта контакта ввода-вывода, к которому он подключен. Аналогично для COM1B1:0. Однако обратите внимание, что бит регистра направления данных (DDR), соответствующий контакту OC1A или OC1B, должен быть записан в 1, чтобы активировать драйвер вывода.
Функциональность порта контакта ввода-вывода, к которому он подключен. Аналогично для COM1B1:0. Однако обратите внимание, что бит регистра направления данных (DDR), соответствующий контакту OC1A или OC1B, должен быть записан в 1, чтобы активировать драйвер вывода.
с
с
.V
Сравнить режим вывода, коррекцию фазы и коррекцию фазы и частоты ШИМ
w
• Бит 3 — FOC1A: принудительное сравнение выходного сигнала для канала A • Бит 2 — FOC1B: принудительное сравнение выходного сигнала для канала B
Эти биты не используется в фазе правильный ШИМ установите бит 0; Функциональность WGM11 и WGM10 будет предоставлена позже
~ 5 бит 0;
co
• Бит 2:0 – CS12:0: выбор часов
Три бита выбора часов выбирают источник часов, который будет использоваться таймером/счетчиком,
– это
R ob
3
о.
Бит выбора часов Описание
По умолчанию Источник синхронизации не выбран. при выборе часов запустится PWM
при выборе часов запустится PWM
.V
• Биты WGM13, WGM12 в TCCR1B и WGM11, WGM10 в TCCR1A
обозначают режим генерации волны. Есть несколько режимов ШИМ и времени, здесь мы хотим сделать настройку корректной фазы ШИМ для TOP=255, и для этого вам нужно написать
W
WGM
WGM12
WGM11
WGM10
0
0
0
1
W
W
WGM13
W
WRAMEG.8WGM13
*****6 w
W.
9 WGM13
*****6 w
WR**0006 *****6 w
w
W. техпаспорт
~ 6 ~
co
m
Таймер/счетчик 1 – TCNT1H и TCNT1L
R ob
o.
Регистр сравнения выходов 1 A — OCR1AH и OCR1AL
w
w
w
.V
is io n
Регистр сравнения выходов 1 B– OCR1BH и OCR1BL
~ 7 ~ Подробности см. в руководстве по вводу-выводу. Код:
R ob
o.
co
#include Int main() { Шаг 1 Установите PB1 (OC1A) в качестве выходного контакта; Шаг 2 Включите ШИМ; Шаг 3 Выберите правильный по фазе режим PWM и значение TOP; Шаг 4 Установите значение OCR TOP/2; Шаг 5 Установите значение предварительного делителя и источник тактового сигнала; Шаг 6 Запустите ШИМ; В то время как(1) { //выполняем любую работу здесь } Return 0; }
m
Теперь возвращаемся к нашему коду
DDRB|=(1
микроконтроллер — 14 вольт и ШИМ с Atmega8
спросил
Изменено 11 лет, 2 месяца назад
Просмотрено 2к раз
\$\начало группы\$
Я хотел управлять светодиодами на моей модели железной дороги с помощью микроконтроллера и (возможно, программного) ШИМ, но только что увидел, что большинство светодиодов, которые вы можете купить для моделей железных дорог, работают на 12-16 В, а трансформатор подает 14 В. .
.
Теперь я боюсь, что я не могу сделать это с микроконтроллерами и PWM, потому что они дают только 5V.
Итак, есть ли способ обеспечить 16В микроконтроллером?
- микроконтроллер
- светодиод
- ШИМ
\$\конечная группа\$
\$\начало группы\$
Вот простая схема управления светодиодом от цифрового выхода 5 В при питании от более высокого напряжения:
Когда на цифровом выходе низкий уровень, транзистор закрыт, а светодиод не горит. Когда на цифровом выходе высокий уровень, база Q1 удерживается на уровне 5 В. С эмиттерным резистором это приводит к тому, что Q1 действует как достаточно постоянный сток тока. Если в переходе BE падает 700 мВ, то на R1 будет 4,3 В, что делает ток близким к 10 мА. Пока имеется достаточное напряжение для того, чтобы транзистор поглотил этот ток, ток будет в значительной степени не зависеть от напряжения питания. Это также хороший дизайн, если источник питания имеет много пульсаций, но вы хотите, чтобы светодиодный световой поток был постоянным.
Это также хороший дизайн, если источник питания имеет много пульсаций, но вы хотите, чтобы светодиодный световой поток был постоянным.
Допустим, вы используете зеленый светодиод, напряжение которого падает чуть более 2 В. Коллектор Q1 может опуститься до напряжения чуть ниже 5 В и по-прежнему действовать как приемник тока. Это означает, что пока на аноде светодиода есть около 7 В или более, он будет работать с 10 мА, когда цифровой выход высокий.
\$\конечная группа\$
\$\начало группы\$
Любой уровень напряжения или нагрузка, которой вы хотите управлять, могут управляться с помощью подходящей схемы интерфейса. Например, вы можете «легко» переключать 1000 вольт или 100 ампер, если у вас есть правильный интерфейс. Когда вам нужны напряжения, скажем, менее 50 вольт и токи до «несколько ампер», задача становится относительно легкой благодаря наличию множества доступных и недорогих интерфейсных ИС.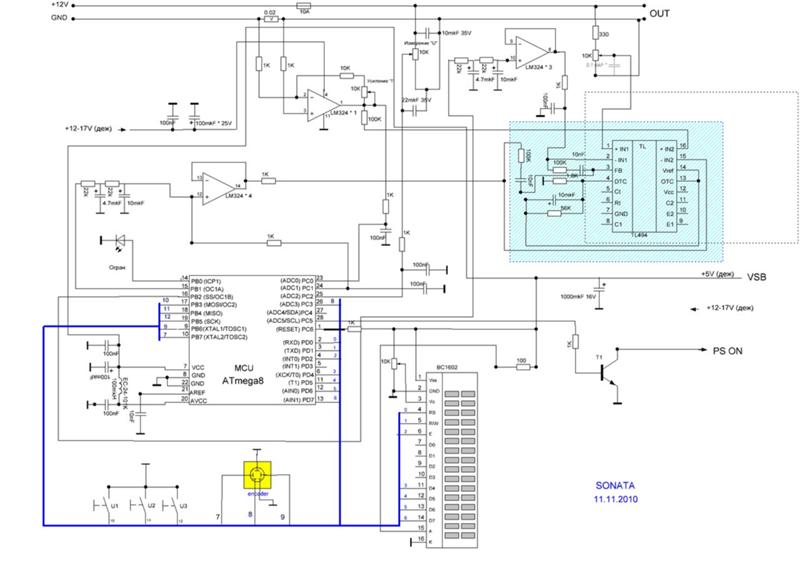
Вы можете использовать отдельные транзисторы или любое количество интегральных схем, которые сделают это. IC или транзисторный дайвер позволяет использовать любое желаемое напряжение и может обеспечить больший ток, чем может обеспечить микроконтроллер.
Вот пример использования распространенного, популярного и дешевого драйвера ULN2803. Показано, что это управляется портом принтера, но Atmega8 будет выполнять ту же работу. Они показывают 9 вольт, но вы можете использовать до 50 вольт с ULN2803 в зависимости от производителя. Этот рассчитан на 50 вольт.
Показанный стабилитрон не всегда нужен — в зависимости от того, что приводится в действие — но обычно это неплохая идея, НО они показали его задом наперёд! — поверни это другой стороной. Напряжение стабилитрона, немного превышающее напряжение питания, подходит для большинства ситуаций с нагрузкой. Его цель состоит в том, чтобы направить и рассеять пики выключения — обсуждение позже. [Эта схема была взята отсюда — связана с проблемами порта IBM, так что не на 100% связана, но интересна. ]
]
Вышеприведенный драйвер имеет нагрузку, привязанную к V+.
Если нагрузка имеет один конец, заземленный драйвер, как показано ниже, будет работать. Значения и используемые транзисторы зависят от приложений и требуют обсуждения. Спросите, если интересно.
\$\конечная группа\$
\$\начало группы\$
Использование драйвера Darlington (ULN2803 и т. д.) — это действительно простой способ управлять вещами, которые находятся рядом, например, двигателями, шаговыми двигателями, светодиодными матрицами и т. д.… да… и дальше, но…
Теперь, как фанат модели железной дороги, я знаю, что замена проводки или добавление большего количества проводов может быть головной болью. Обычно у вас там уже есть провода — вам просто нужно их переключить. Использование твердотельных реле может быть простым и быстрым решением, и если вы будете искать, вы можете получить их в упаковках по разумной цене.