
ОглавлениеОТ ИЗДАТЕЛЬСТВАВВЕДЕНИЕ ЧАСТЬ ПЕРВАЯ. ПРЕДВАРИТЕЛЬНЫЕ ПОНЯТИЯ ГЛАВА I. ТЕОРИЯ ВЕКТОРОВ II. Свободные векторы. Три координаты свободного вектора III. Скользящие векторы. Пять координат скользящего вектора 9. Теория моментов. 10. Аналитические выражения моментов вектора относительно осей координат.  12. Относительный момент двух векторов 13. Скользящие векторы, сходящиеся в одной точке. Результирующий вектор. 14. Произвольная система векторов. Главный вектор и главный момент. 15. Изменение главного вектора и главного момента; инварианты; центральная ось. 16. Сумма моментов относительно произвольной оси. Прямые нулевого момента. IV. Эквивалентные системы скользящих векторов. Элементарные операции. Приведение системы скользящих векторов 19. Элементарные операции. 20. Приведение к двум векторам. 21. Геометрическое истолкование инварианта LX+MY+NZ. 22. Приведение двух эквивалентных систем друг к другу. 23. Пары. 24. Приведение к вектору и паре. 26. Частные случаи приведения. 28. Взаимный момент системы скользящих векторов. 29. Приложение общих теорем к случаю параллельных скользящих векторов. V. Связанные векторы; шесть координат связанного вектора; центр параллельных связанных векторов.  Векторные производные Векторные производные31. Центр системы параллельных связанных векторов. 32. Моменты параллельных связанных векторов относительно плоскости. 33. Векторные производные. VI. Полярные векторы. Аксиальные векторы. Скалярные величины VII. Другие геометрические образы, которые могут быть использованы в механике I. Кинематика точки 37. Движение точки. 38. Прямолинейное равномерное движение; скорость. 39. Произвольное прямолинейное движение; скорость. 40. Вектор скорости в криволинейном движении. 41. Вектор ускорения. 42. Касательное и нормальное ускорения (Гюйгенс). II. Поступательное движение и вращение неизменяемой системы 44. Вращение вокруг неподвижной оси. Угловая скорость. Геометрическое представление. III. Скорость в относительном движении. Сложение поступательных и вращательных движений. Скорости точек свободного тела 46. Сложение поступательных движений. 47. Совокупность двух вращений. 48.  49. Частные случаи. 50. Геометрические следствия. 51. Распределение скоростей в движущемся твердом теле. 52. Мгновенная винтовая ось. Касательное винтовое движение. 53. Величина скорости точки тела. 54. Непрерывное движение. 55. Твердое тело с неподвижной точкой. 56. Тело перемещается параллельно неподвижной плоскости. 57. Качение и верчение подвижной поверхности по неподвижной поверхности. IV. Ускорения. Теорема Кориолиса 59. Ускорение в относительном движении. Теорема Кориолиса. 60. Поступательное движение подвижных осей. Сложение движений. ГЛАВА III. ОСНОВНЫЕ ЗАКОНЫ МЕХАНИКИ. МАССА И СИЛА II. Единицы массы и силы; однородность 73. Технические единицы. Килограмм-сила. 74. Абсолютные единицы. Дина. 75. Статическое измерение сил. 76. Однородность. ГЛАВА IV. РАБОТА. СИЛОВАЯ ФУНКЦИЯ 78. Аналитическое выражение элементарной работы.  79. Полная работа. Единица работы. 80. Сила зависит от времени или скорости. 81. Сила зависит только от положения движущейся точки. 82. Частный случай, когда сила зависит только от начального и конечного положений. Силовая функция. Потенциальная энергия. 84. Примеры. 85. Замечание о поверхностях уровня. 86. Мощность. II. Система точек 88. Примеры. ЧАСТЬ ВТОРАЯ. СТАТИКА ГЛАВА V. РАВНОВЕСИЕ ТОЧКИ. РАВНОВЕСИЕ СИСТЕМЫ 90. Пример. Притяжения, пропорциональные расстояниям. 91. Точка, движущаяся без трения по неподвижной поверхности. 92. Точка, движущаяся без трения по неподвижной кривой. II. Системы материальных точек 94. Силы внутренние и силы внешние. Шесть необходимых условий равновесия. 96. Разделение произвольной системы на части. Необходимые условия равновесия. ГЛАВА VI. РАВНОВЕСИЕ ТВЕРДОГО ТЕЛА I. Приведение сил, приложенных к твердому телу. Равновесие 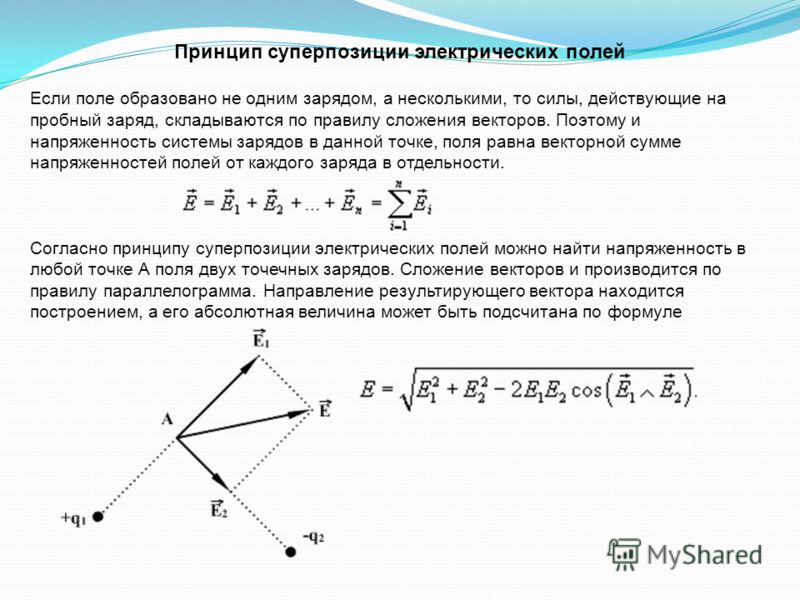 Равновесие. Равновесие.98. Эквивалентные системы сил. 99. Частные случаи приведения. 100. Другая форма условий равновесия. II. Приложения. Силы в плоскости. Параллельные силы. Центр тяжести 102. Примеры. 103. Параллельные силы. 104. Центр тяжести. 105. Координаты центра тяжести. III. Приложения. Произвольные силы в пространстве 107. Условия, при которых силы, находящиеся в равновесии, могут быть направлены по трем, четырем, пяти, шести прямым. IV. Твердое тело, подчиненное связям 109. Тело с неподвижной точкой. 111. Тело вращается вокруг оси и скользит вдоль нее. 112. Тело, опирающееся на неподвижную плоскость. 113. Несколько твердых тел. V. Некоторые формулы для вычисления центра тяжести ГЛАВА VII. ИЗМЕНЯЕМЫЕ СИСТЕМЫ I. Веревочный многоугольник 122. Натяжение. 123. Равновесие веревочного многоугольника. Многоугольник Вариньона. 124. Условия на концах. 125. Сходящиеся силы. 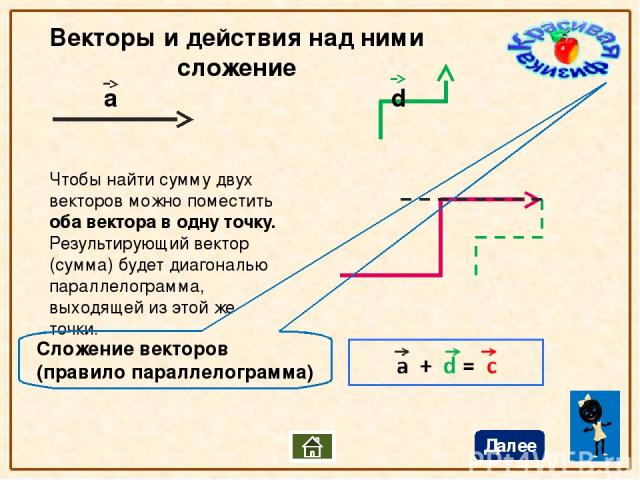 126. Параллельные силы. 127. Графические приложения теории веревочных многоугольников. 128. Кольца, скользящие на нити. 129. Фермы. II. Равновесие нитей 132. Общие интегралы. 133. Определение постоянных, условия на концах. 134. Случай, когда сила не зависит от длины дуги. 135. Замечание о натяжении. 136. Естественные уравнения равновесия нити. 137. Формула, определяющая натяжение, когда существует силовая функция. 138. Параллельные силы. 139. Цепная линия. 140. Определение постоянных. 141. Центральные силы. 142. Пример существования бесчисленного множества положений равновесия. 143. Равновесие нити на поверхности. 144. Примеры. 145. Естественные уравнения равновесия нити на поверхности. III. Исследование одного определенного интеграла 147. Формула Тэта и Томсона. 149. Та же задача на поверхности. 150. Рефракция. IV. Плоские эластики 152. Ось стержня была первоначально дугой окружности. 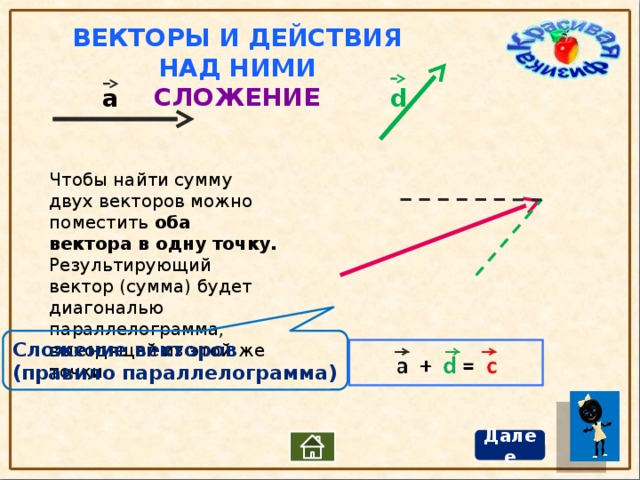 153. Случай первоначально прямолинейного стержня, сжимаемого на концах двумя одинаковыми и прямо противоположными силами. 154. Стержень, изгибаемый действующим в одной плоскости постоянным нормальным давлением. ГЛАВА VIII. ПРИНЦИП ВОЗМОЖНЫХ СКОРОСТЕЙ I. Формулировка и доказательство принципа в случае связей, выражающихся равенствами 157. Формулировка принципа. 158. Свободная точка. 159. Точка на поверхности. 161. Свободное твердое тело. 162. Лемма. 163. Сочетания предыдущих связей. 164. Общее определение идеальных связей. 165. Доказательство принципа. 166. Замечание о работе силы. 167. О связях, осуществляемых при помощи тел, не имеющих массы. II. Первые примеры. Системы с полными связями. Простые машины III. Общие условия равновесия, выводимые из принципа возможных скоростей 172. Голономные системы; координаты голономной системы. 173. Частный случай, когда выражение возможной работы есть полный дифференциал.  174. Приложения. Тяжелые системы. IV. Множители Лагранжа 178. Случай неголономной системы. 179. Приложение принципа возможных скоростей к равновесию нитей. V. Общие теоремы, выводимые из принципа возможных скоростей VI Неудерживающие связи 187. Связи, выражаемые неравенствами в конечной форме. ГЛАВА IX. ПОНЯТИЕ О ТРЕНИИ 189. Трение скольжения. 190. Законы трения скольжения в состоянии покоя. 191. Равновесие тел с трением. 192. Тяжелое тело, опирающееся на плоскость в нескольких точках и находящееся под действием только одной силы F. 193. Лестница. 194. Веревка, навернутая на поперечное сечение цилиндра. 195. Трение скольжения при движении. 196. Трение качения в начале и во время движения. ЧАСТЬ ТРЕТЬЯ. ДИНАМИКА ТОЧКИ ГЛАВА X. ОБЩИЕ СВЕДЕНИЯ. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ. ДВИЖЕНИЕ СНАРЯДОВ 199. Первые интегралы. 200. Естественные уравнения (Эйлер). 201. Количество движения.  202. Теорема о проекции количества движения. 203. Теорема о моменте количества движения. Закон площадей. 204. Геометрическая интерпретация двух предыдущих теорем. 205. Теорема кинетической энергии. 206. Примеры. 207. Замечание к интегралу кинетической энергии. 208. Устойчивость равновесия свободной материальной точки. Доказательство Лежен-Дирихле. II. Прямолинейное движение 210. Уравнение прямолинейного движения. Простые случаи интегрируемости. 211. Приложение к движениям, происходящим под действием силы зависящей только от положения. 212. Движения под действием силы, зависящей только от скорости. 213. Прямолинейное таутохронное движение. 214. Дан закон прямолинейного движения, найти силу. III. Криволинейное движение. Тяжелая точка в пустоте и в сопротивляющейся среде. Электрическая частица 217. Движение тяжелой точки в пустоте. 218. Определение параллельной силы по заданной траектории. 219. Криволинейное движение тяжелого тела в сопротивляющейся среде. 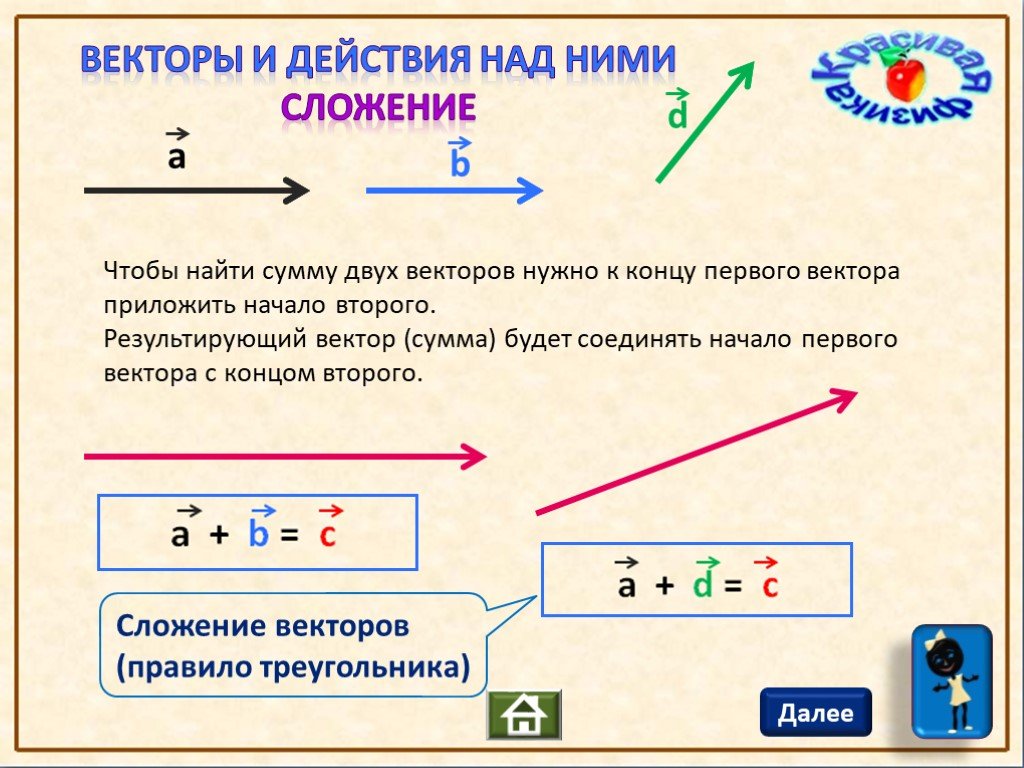 220. Движение легкого вращающегося шара в воздухе. 221. Движение наэлектризованной частицы в наложенных друг на друга электрическом и магнитном полях. ГЛАВА XI. ЦЕНТРАЛЬНЫЕ СИЛЫ. ЭЛЛИПТИЧЕСКОЕ ДВИЖЕНИЕ ПЛАНЕТ 223. Сила есть функция только расстояния. 224. Сила вида … 225. Обратная задача. Определение центральной силы, когда задана траектория. II. Движение планет 228. Кометы. 229. Спутники. 230. Всемирное притяжение. 231. Двойные звезды. 232. Задача Бертрана. 233. Краткие указания по поводу некоторых других задач. III. Элементарные сведения из небесной механики 235. Задача двух тел. 236. Масса планеты, обладающей спутником. 237. Определение времени в эллиптическом движении. 238. Геометрический метод. 239. Аналитические преобразования. 240. Элементы эллиптического движения. ГЛАВА XII. ДВИЖЕНИЕ ТОЧКИ ПО НЕПОДВИЖНОЙ ИЛИ ДВИЖУЩЕЙСЯ КРИВОЙ 245. Устойчивость равновесия. 246. Движение тяжелой точки по неподвижной кривой. 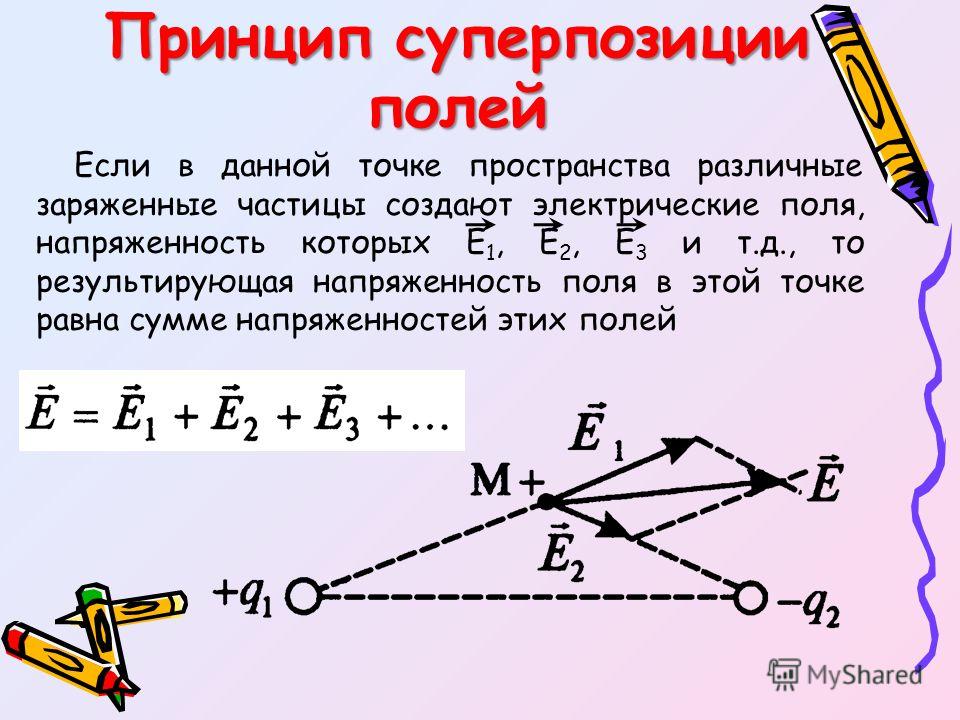 247. Нормальная реакция. Естественные уравнения. 248. Математический маятник. 249. Движение математического маятника в сопротивляющейся среде. 250. Циклоидальный маятник. 251. Движение тяжелой точки по кривой, расположенной в вертикальной плоскости, при действии трения и сопротивления среды. 252. Таутохроны. 253. Приложения. 254. Брахистохрона для силы тяжести. 255. Брахистохроны в общем случае. 256. Приложение теорем Томсона и Тэта к брахистохронам. 257. Брахистохроны на заданной поверхности. II. Движение материальной точки на изменяемой кривой ГЛАВА XIII. ДВИЖЕНИЕ ТОЧКИ ПО НЕПОДВИЖНОЙ ИЛИ ДВИЖУЩЕЙСЯ ПОВЕРХНОСТИ II. Случай неподвижной поверхности 266. Вывод уравнения кинетической энергии из уравнений Лагранжа. 267. Устойчивость равновесия в случае существования силовой функции U. 268. Нормальная реакция. 269. Естественные уравнения и нормальная реакция. 270. Геодезические линии. 271. Применение уравнений Лагранжа.  272. Бесконечно малые колебания тяжелой точки около наинизшей точки поверхности. III. Движение на поверхности вращения 274. Формула Клеро. 275. Упражнение. Геодезические линии поверхности, образованной вращением равносторонней гиперболы вокруг своей асимптоты. 276. Движение тяжелой точки на поверхности врадцения, ось которой Oz вертикальна. 277. Сферический маятник. 278. Вычисление нормальной реакции. 279. Интегрирование в эллиптических функциях. 280. Теорема Гринхилла. 281. Бесконечно малые колебания. ГЛАВА XIV. УРАВНЕНИЯ ЛАГРАНЖА ДЛЯ СВОБОДНОЙ ТОЧКИ 283. Интеграл кинетической энергии. 284. Приложение. 285. Сферические координаты. 286. Эллиптические координаты в пространстве. 287. Эллиптические координаты в плоскости ху. ГЛАВА XV. ПРИНЦИП ДАЛАМБЕРА. ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ 289. Замечание о силе инерции. 290. Принцип наименьшего действия. ГЛАВА XVI. КАНОНИЧЕСКИЕ УРАВНЕНИЯ. ТЕОРЕМА ЯКОБИ. ПРИЛОЖЕНИЯ I. 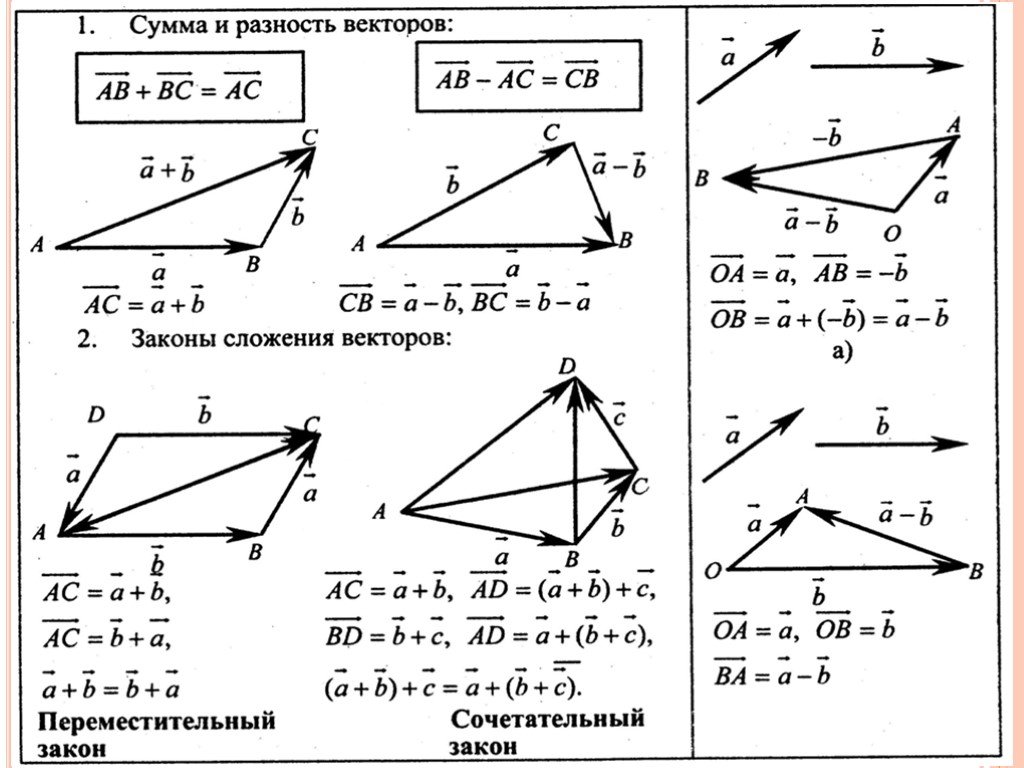 Канонические уравнения. Теорема Якоби Канонические уравнения. Теорема ЯкобиII. Теорема Якоби 298. Частный случай, когда t не входит явно в коэффициенты уравнения Якоби. 299. Геометрическое свойство траекторий. 300. Декартовы координаты в пространстве. III. Плоское движение. Движение по поверхности 302. Параболическое движение тяжелой точки в пустоте. 303. Центральная сила — функция расстояния. 304. Уравнения движения планеты в форме Якоби. 305. Геодезические линии поверхностей Лиувилля. Приложение к эллипсоиду. IV. Движение в пространстве 306. Движение планеты в сферических координатах по Якоби 307. Движение точки, притягиваемой двумя неподвижными центрами, обратно пропорционально квадрату расстояния. 308. Эллиптические координаты в пространстве. V. Приложения к принципу наименьшего действия, к брахистохронам, к равновесию нитей 310. Точка на поверхности. 311. Параболическое движение. 312. Брахистохроны и фигуры равновесия нитей в случае силовой функции. Задача рефракции.  |
Функции векторов, мудрее компонентов — Win32 apps
Twitter LinkedIn Facebook Адрес электронной почты
- Статья
- Чтение занимает 2 мин
Перечисляет функции вектора, мудрее компонентов.
| Раздел | Описание |
|---|---|
| XMVectorInsert | Поворот вектора влево на заданное число 32-разрядных компонентов и вставка выбранных элементов этого результата в другой вектор. |
| XMVectorMergeXY | Создает новый вектор, объединяя компоненты x и y двух векторов. |
| XMVectorMergeZW | Создает новый вектор, объединяя z и w-компоненты двух векторов. |
| XMVectorPermute | Permutes компоненты двух векторов для создания нового вектора. |
| XMVectorRotateLeft | Поворот вектора влево на заданное число 32-разрядных элементов. |
| XMVectorRotateRight | Поворот вектора вправо на заданное число 32-разрядных элементов. |
| XMVectorSelect | Выполняет выбор по каждому компоненту между двумя входными векторами и возвращает результирующий вектор. |
| XMVectorSelectControl | Определяет вектор управления для использования в XMVectorSelect. |
| XMVectorShiftLeft | Сдвигает вектор влево на заданное число 32-разрядных элементов, заполняя освобожденные элементы элементами из второго вектора. |
| XMVectorSplatW | Реплицирует компонент w вектора на все компоненты. |
| XMVectorSplatX | Реплицирует x-компонент вектора на все компоненты. |
| XMVectorSplaty | Реплицирует компонент y вектора на все компоненты. |
| XMVectorSplatz | Реплицирует компонент z вектора на все компоненты. |
| XMVectorSwizzle | Swizzles a vector. |
Функции вектора библиотеки DirectXMath
Resultant Vector, как вычислить равнодействующую, используя метод параллелограмма и метод головы к хвосту.
 Результат просто…
Результат просто…Эта страница:
Результирующий вектор — это вектор, который «получен» в результате сложения двух или более векторов. Есть два разных способа вычисления результирующего вектора.
Методы расчета результирующего вектора:
- Метод головы к хвосту для вычисления результата, который включает в себя выравнивание головы одного вектора с хвостом другого.
- Метод параллелограмма для вычисления результирующего вектора.
 Этот метод использует свойства параллелограмма, но, в конце концов, сводится к простой формуле.
Этот метод использует свойства параллелограмма, но, в конце концов, сводится к простой формуле.
 Этот метод использует свойства параллелограмма, но, в конце концов, сводится к простой формуле.
Этот метод использует свойства параллелограмма, но, в конце концов, сводится к простой формуле.На картинке слева черный вектор является результатом двух красных векторов. Чтобы попытаться понять, что такое равнодействующая, рассмотрим следующую историю.
Если вы ехали из своего дома, с центром в исходной точке. К дому друзей, в точку (3, 4), представьте, что вам нужно было ехать двумя разными дорогами, это два красных вектора. Однако результирующий вектор-вектор будет прямым путем от вашего дома до дома вашего друга, и черный вектор представляет этот путь.
Голова к хвосту Метод
Метод головы к хвосту — это способ найти результирующий вектор. Шаги довольно прямые. Метод «голова к хвосту» рассматривает начало вектора как конец со стрелкой или «заостренный конец». Хвост вектора находится там, где начинается вектор.
Хвост вектора находится там, где начинается вектор.
- Поместите два вектора рядом друг с другом так, чтобы голова одного вектора касалась хвоста другого вектора.
- Нарисуйте результирующий вектор, начав с того места, где хвост первого вектора находится в начале второго вектора.
шагов для метода «голова к хвосту»
Вычислить результирующий вектор магнитуды
Найдите сумму каждой пары векторов (величину результирующего вектора).
Чтобы найти величину результирующего вектора, используйте теорему Пифагора.
Практика ПроблемыПроблема 1
Вы вышли из дома, чтобы навестить друга. Вы сели в машину, проехали 40 миль на восток, затем выехали на шоссе и проехали 50 миль на север.
Вы сели в машину, проехали 40 миль на восток, затем выехали на шоссе и проехали 50 миль на север.
Нарисуйте вектор от начала вашего пути, вашего дома, и конца, дома вашего друга.
Какова длина нарисованного вами вектора?
Проблема 2
Чему равна сумма двух векторов? Используйте метод головы к хвосту, чтобы вычислить результирующий вектор на рисунке справа.
Метод параллелограмма для вычисления результата
Прежде чем приступить к методу параллелограмма для решения результирующих векторов, вы должны ознакомиться со следующими темами.
- SOHCATOA (основной синус, косинус, тангенс)
- Закон косинусов
- Закон синусов
- Следующие свойства параллелограммов
- Противоположные стороны параллелограммов равны
- Противоположные углы параллелограммов равны
Задача 3
Чтобы лучше понять, как работает метод параллелограмма, давайте рассмотрим два вектора ниже. Векторы имеют величины 17 и 28, а угол между ними равен 66°. Наша цель — использовать метод параллелограмма для определения величины равнодействующей.
Шаг 1
Нарисуйте параллелограмм на основе двух уже имеющихся векторов. Эти векторы будут двумя сторонами параллелограмма (а не противоположными сторонами, так как между ними есть угол).
Шаг 2
Теперь у нас есть параллелограмм и известны два угла (противоположные углы параллелограмма равны). Мы также можем вычислить другую пару углов, так как другая пара конгруэнтна, а сумма всех четырех углов должна составлять 360.
Шаг 3
Начертите диагонали папралелограммы. Эта диагональ равна результирующему вектору .
Эта диагональ равна результирующему вектору .
Шаг 4
Используйте закон косинусов, чтобы определить длину равнодействующей.
Используйте закон косинусов для вычисления равнодействующей.
Что такое результат?
Результирующее число представляет собой векторную сумму двух или более векторов. Это результат сложения двух или более векторов вместе. Если сложить векторы смещения A, B и C, результатом будет вектор R. Как показано на диаграмме, вектор R можно определить с помощью точно нарисованной масштабированной диаграммы сложения векторов.
Сказать, что вектор R представляет собой результирующее смещение векторов смещения A, B и C, значит сказать, что человек, который шел со смещениями A, затем B, а затем C, сместится на столько же, сколько человек, который шел со смещением R. Вектор смещения R дает тот же результат , что и векторы смещения A + B + C. Вот почему можно сказать, что
Приведенное выше обсуждение относится к результату сложения векторов смещения. При добавлении векторов смещения результатом будет результирующего смещения . Но любые два вектора могут быть добавлены, если они являются одной и той же векторной величиной. Если добавить два или более векторов скорости, результатом будет результирующая скорость . Если добавить два или более векторов силы, результатом будет результирующая сила . Если добавить два или более векторов импульса, то результат будет . ..
..
Во всех таких случаях результирующий вектор (будь то вектор смещения, вектор силы, вектор скорости и т. д.) является результатом сложения отдельных векторов. Это то же самое, что добавить А + В + С + … . «Делать A + B + C — это то же самое, что делать R». В качестве примера рассмотрим футболиста, которого одновременно бьют три игрока противоположной команды (игроки A, B и C). Футболист испытывает на себе воздействие трех различных сил. Каждая приложенная сила вносит свой вклад в общую или результирующую силу. Если сложить три силы вместе с помощью методов сложения векторов (обсуждавшихся ранее), то можно определить результирующий вектор R. В этом случае испытать три силы A, B и C — это то же самое, что испытать силу R. Если вас ударят игроки A, B и C, это приведет к той же силе, что и удар, нанесенный одним игроком, применяющим силу R». Сделать A + B + C — это то же самое, что сделать R». Вектор R — это тот же результат, что и векторы A + B + C!!
Таким образом, результат представляет собой векторную сумму всех отдельных векторов.