Резонансное сопротивление — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
| Эквивалентная схема контактного модулятора, приведенная к первичной обмотке. [1] |
Резонансное сопротивление R0 получим из условий резонанса R0 я; w L n / Ru, причем / к йк / ( 2зт) — частота коммутации. [2]
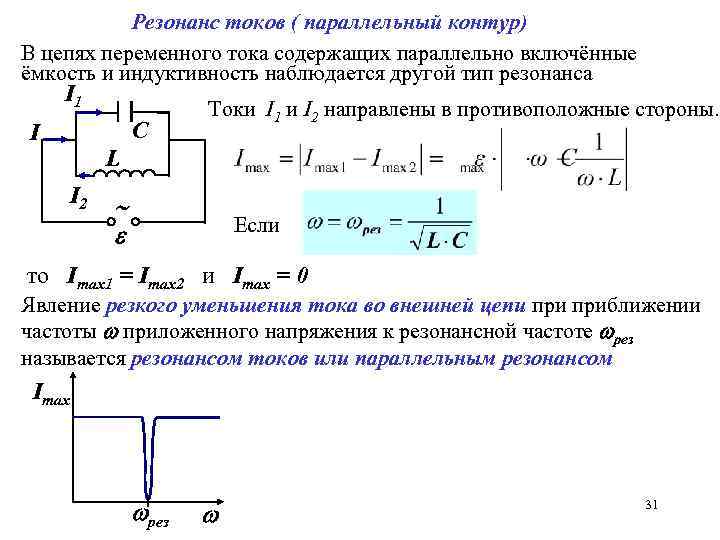
Резонансное сопротивление — сопротивление, которое для переменного тока представляет собой колебательный контур, настроенный в резонанс на частоту этого тока. Если же определяется сопротивление между двумя точками а и б, между которыми емкость и индуктивность контура включены параллельно ( см. рис. б), то Р.с. будет наибольшим по сравнению с сопротивлением на всех других частотах; этот случай соответствует параллельному резонансу. [3]
Резонансное сопротивление — сопротивление, которое представляет собой для переменного тока колебательный контур, настроенный в резонанс ( см.
Резонансное сопротивление контура на длинных волнах бывает порядка нескольких сотен тысяч ом, на коротких волнах порядка нескольких десятков тысяч ом, а на ультракоротких оно часто измеряется тысячами ом. [5]
Резонансное сопротивление контура также очень сильно зависит от нагрузки. [6]
Ненагруженное резонансное сопротивление является важнейшим параметром анодно-сеточного резонатора генераторов дециметровых и сантиметровых волн, определяющим эффективность работы генератора. Известно, что с повышением рабочей частоты величина резонансного сопротивления резко падает. Правильный выбор схемы и размеров может существенно повысить резонансное сопротивление резонатора в заданном диапазоне частот. [7]
Резонансное сопротивление контура Roe является важнейшим параметром колебательного контура, наиболее полно определяющим его качества. Забегая вперед, можно сказать, что чем больше резонансное сопротивление контура, тем большее усиление обеспечивает усилительный каскад, в состав которого входит данный контур.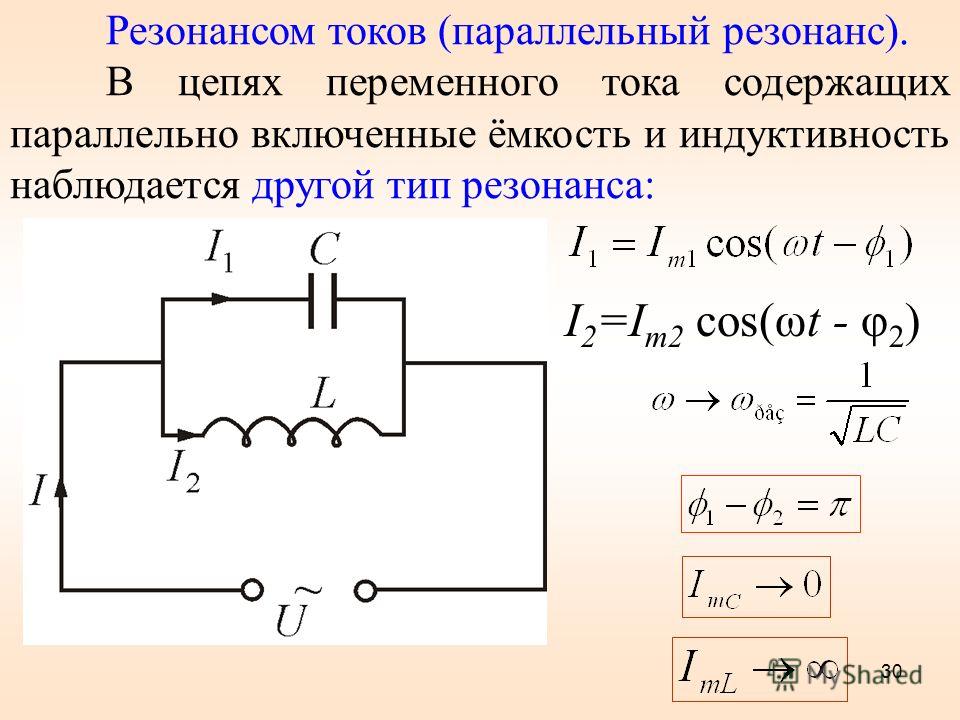 Колебательный контур, элементы которого подсоединяются параллельно внешнему источнику, получил название параллельного колебательного контура.
[8]
Колебательный контур, элементы которого подсоединяются параллельно внешнему источнику, получил название параллельного колебательного контура.
[8]
Резонансное сопротивление нагруженного резонатора
Резонансное сопротивление нснагруженного анодного контура, а следовательно, и напряжение ВЧ значительно выше, чем при нормальной нагрузке. По этой причине настройку генераторов УКВ желательно производить при пониженном анодном напряжении. [10]
Резонансное сопротивление ненагруженного анодного контура, а следовательно, и напряжение ВЧ значительно выше, чем при нормальной нагрузке. По этой причине настройку генераторов УКВ желательно производить при пониженном анодном напряжении.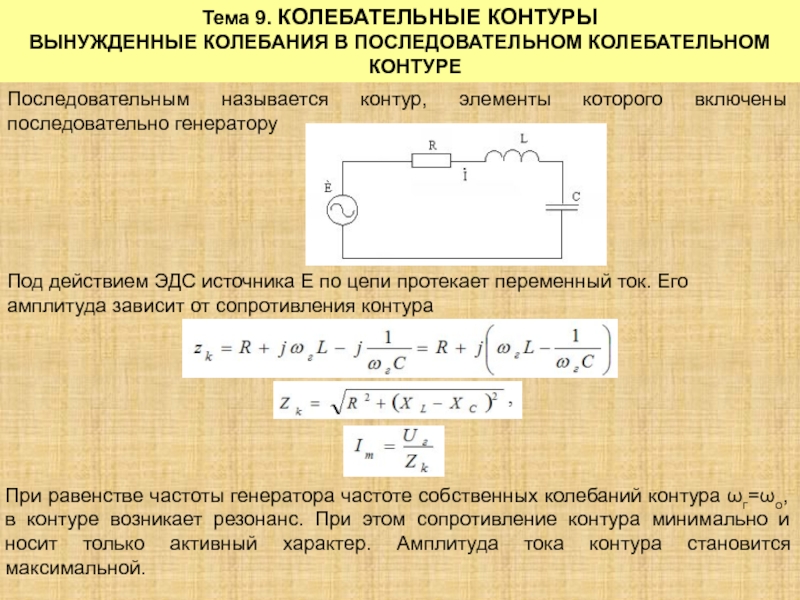
K резонансное сопротивление контура велико и основная гармоника тока не проходит в нагрузку. [12]
| Тороидальный резонатор. [13] |
Понятие резонансного сопротивления употребляется при оценке параметров триодов и тетродов СВЧ. [14]
Величина резонансного сопротивления, как оказалось, не зависит от распределения активного сопротивления внутри контура между его ветвями. [15]
Страницы: 1 2 3 4
Механо-резонансное манипулирование в лечении заболеваний опорно-двигательного аппарата
По данным отечественных публикаций, боль в спине занимает 2-е место по количеству дней нетрудоспособности среди всех классов болезней. 24,9% активных обращений лиц трудоспособного возраста за амбулаторной помощью связано с болью в спине [1]. Известно также, что ещё с античных времён в лечении боли при заболеваниях позвоночника и суставов ведущая роль отводилась методам мануальной и механотерапии. «До наших времён дошли приёмы мануальной терапии, рекомендуемые Гиппократом (например, растяжение больного в положении на животе за верхние и нижние конечности – так называемая “поза Гиппократа”)» [2]. Гиппократ неоднократно говорил о важности знаний о позвоночнике, т.к. с ним связаны многие болезни. Гиппократу приписывают высказывание о том, что манипуляции на позвоночнике – древнее искусство и что он высокого мнения о тех, кто будет последователем природного лечения [3]. Говоря о сочленениях, Гиппократ использует термин «паратремата», что примерно соответствует понятию «дислокации» или «скублюкации» хиропрактиков. «Позвонки смещаются не сильно, а совсем немного…» О методах лечения позвоночника он писал: «Ничто не должно ускользать от глаз опытного врача, что бы он не смог использовать при вправлении смещённых позвонков, не причиняя вреда пациенту» [4]. Но не только в те времена, но и сейчас «мануальная терапия является наиболее эффективным и радикальным методом лечения заболеваний позвоночника и суставов» (А.
«До наших времён дошли приёмы мануальной терапии, рекомендуемые Гиппократом (например, растяжение больного в положении на животе за верхние и нижние конечности – так называемая “поза Гиппократа”)» [2]. Гиппократ неоднократно говорил о важности знаний о позвоночнике, т.к. с ним связаны многие болезни. Гиппократу приписывают высказывание о том, что манипуляции на позвоночнике – древнее искусство и что он высокого мнения о тех, кто будет последователем природного лечения [3]. Говоря о сочленениях, Гиппократ использует термин «паратремата», что примерно соответствует понятию «дислокации» или «скублюкации» хиропрактиков. «Позвонки смещаются не сильно, а совсем немного…» О методах лечения позвоночника он писал: «Ничто не должно ускользать от глаз опытного врача, что бы он не смог использовать при вправлении смещённых позвонков, не причиняя вреда пациенту» [4]. Но не только в те времена, но и сейчас «мануальная терапия является наиболее эффективным и радикальным методом лечения заболеваний позвоночника и суставов» (А. Б. Ситель) [2] и «наиболее подходящим лечением двигательной активности суставов в позвоночном сегменте являются манипуляции…» (Карел Левит) [3]. Принимая во внимание слова из клятвы Гиппократа «Я направляю режим больных к их выгоде сообразно с моими силами и моим разумением, воздерживаясь от причинения всякого вреда…» [5], в настоящее время актуальным и целесообразным является поиск новых более эффективных, а главное наиболее безопасных способов проведения лечебных механических манипуляций на позвоночнике и суставах. Цель исследования: теоретическая разработка и практическая апробация способов выполнения механических манипуляций на позвоночно-двигательных сегментах и суставах, с максимально высоким лечебным коэффициентом полезного действия (КПД), при минимальной травматизации тканей. МАТЕРИАЛЫ И МЕТОДЫ При разработке новых принципов лечебной механической манипуляции использовались законы механики. Известно, что в механической системе во время совпадения частоты внешней силы с частотой собственных колебаний возникает явление механического резонанса.
Б. Ситель) [2] и «наиболее подходящим лечением двигательной активности суставов в позвоночном сегменте являются манипуляции…» (Карел Левит) [3]. Принимая во внимание слова из клятвы Гиппократа «Я направляю режим больных к их выгоде сообразно с моими силами и моим разумением, воздерживаясь от причинения всякого вреда…» [5], в настоящее время актуальным и целесообразным является поиск новых более эффективных, а главное наиболее безопасных способов проведения лечебных механических манипуляций на позвоночнике и суставах. Цель исследования: теоретическая разработка и практическая апробация способов выполнения механических манипуляций на позвоночно-двигательных сегментах и суставах, с максимально высоким лечебным коэффициентом полезного действия (КПД), при минимальной травматизации тканей. МАТЕРИАЛЫ И МЕТОДЫ При разработке новых принципов лечебной механической манипуляции использовались законы механики. Известно, что в механической системе во время совпадения частоты внешней силы с частотой собственных колебаний возникает явление механического резонанса. При этом происходит резкое возрастание амплитуды вынужденных колебаний элементов системы без приложения для этого дополнительной внешней силы. Так создаются оптимальные условия для перекачки энергии от внешних тел к колебательной системе. В то же время физиологические исследования механических характеристик тела человека показали, что опорно-двигательный аппарат представляет собой механическую колебательную систему со многими степенями свободы. Так измерение механического импенданса, характеризующего величину сопротивления тела колебаниям, показало, что при частоте менее 2Гц тело отвечает на вибрацию как жёсткая масса. На более высоких частотах тело реагирует как колебательная система, с одной или несколькими степенями свободы, что проявляется в резонансном усилении колебаний на отдельных частотах. Для сидящего человека резонанс находится на частотах 4–6 Гц, в положении стоя обнаружены два резонансных пика 5 и 12 Гц. При действии продольных вибраций для сидящего человека резонанс наблюдается по оси «У» на частоте 1–3 Гц и по оси «Х» – 0,8 Гц.
При этом происходит резкое возрастание амплитуды вынужденных колебаний элементов системы без приложения для этого дополнительной внешней силы. Так создаются оптимальные условия для перекачки энергии от внешних тел к колебательной системе. В то же время физиологические исследования механических характеристик тела человека показали, что опорно-двигательный аппарат представляет собой механическую колебательную систему со многими степенями свободы. Так измерение механического импенданса, характеризующего величину сопротивления тела колебаниям, показало, что при частоте менее 2Гц тело отвечает на вибрацию как жёсткая масса. На более высоких частотах тело реагирует как колебательная система, с одной или несколькими степенями свободы, что проявляется в резонансном усилении колебаний на отдельных частотах. Для сидящего человека резонанс находится на частотах 4–6 Гц, в положении стоя обнаружены два резонансных пика 5 и 12 Гц. При действии продольных вибраций для сидящего человека резонанс наблюдается по оси «У» на частоте 1–3 Гц и по оси «Х» – 0,8 Гц.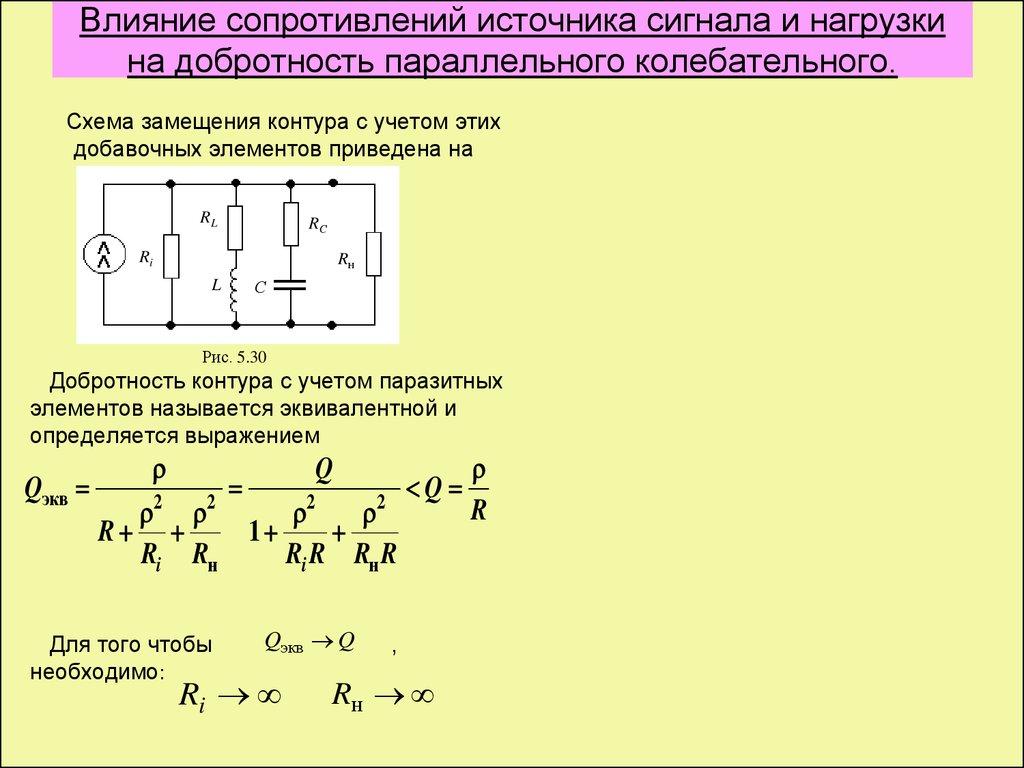 Определены резонансные частоты колебаний некоторых органов и частей тела, коэффициенты дэмпфирования и упругости между отдельными системами организма. Максимум перемещения остистых отростков смежных позвонков при воздействии вертикальной вибрации в положении сидя выявляется при частотах 8–12 Гц, система таз и спина – 5 Гц, грудь и живот – 3–6 Гц [6, с. 298–299]. Изменение колебательных скоростей человек улавливает в пределах 0,0001 м/c (на пороге восприятия) до 1 м/с (на пороге болевого ощущения). Человек ощущает колебания скорости, различающиеся в 10 000 раз. Пороговое значение колебательной скорости – 5х10-8 м/с. [6, с. 294]. Человек не только в состоянии различать широкий спектр частот вибрационного воздействия, но и может осуществлять подобное механическое воздействие с достаточно высокой частотой. В восточном вибрационном массаже рекомендуемая частота вибрации 160–200 колебаний в минуту (2,7–3,3 Гц) [7]. Резонанс может наступать не только при совпадении частоты внешнего воздействия с частотой собственных колебаний осциллятора, но и при кратном, или дробном, соотношении частот (так называемый комбинационный резонанс).
Определены резонансные частоты колебаний некоторых органов и частей тела, коэффициенты дэмпфирования и упругости между отдельными системами организма. Максимум перемещения остистых отростков смежных позвонков при воздействии вертикальной вибрации в положении сидя выявляется при частотах 8–12 Гц, система таз и спина – 5 Гц, грудь и живот – 3–6 Гц [6, с. 298–299]. Изменение колебательных скоростей человек улавливает в пределах 0,0001 м/c (на пороге восприятия) до 1 м/с (на пороге болевого ощущения). Человек ощущает колебания скорости, различающиеся в 10 000 раз. Пороговое значение колебательной скорости – 5х10-8 м/с. [6, с. 294]. Человек не только в состоянии различать широкий спектр частот вибрационного воздействия, но и может осуществлять подобное механическое воздействие с достаточно высокой частотой. В восточном вибрационном массаже рекомендуемая частота вибрации 160–200 колебаний в минуту (2,7–3,3 Гц) [7]. Резонанс может наступать не только при совпадении частоты внешнего воздействия с частотой собственных колебаний осциллятора, но и при кратном, или дробном, соотношении частот (так называемый комбинационный резонанс).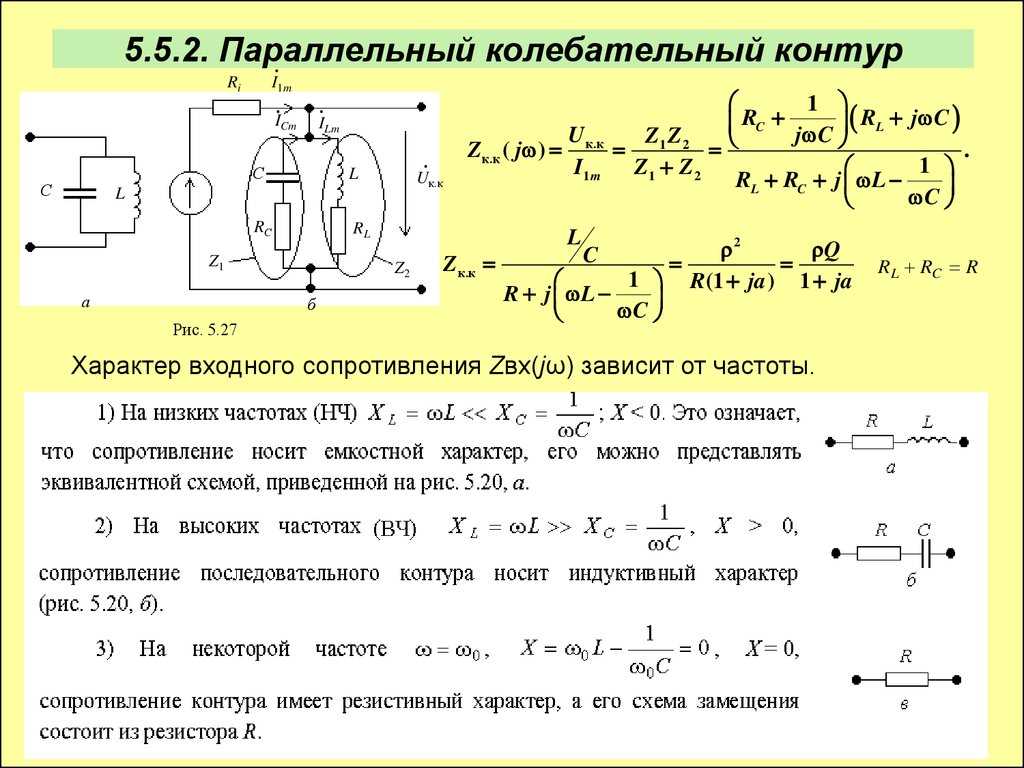 При приближении частоты внешнего воздействия к резонансной частоте наблюдается значительное возрастание амплитуды колебаний осциллятора [8]. Определив собственную частоту колебательной системы, колебательную скорость и массу колеблющегося элемента, представляется возможным придать физическому телу (например, руке врача или воздействующей части аппарата), действующему извне как внешняя сила на колебательную систему (элемента опорно-двигательного аппарата), такие характеристики скорости и массы, которые позволили бы вызвать колебания с величиной амплитуды, близкой к резонансной [9]. Исходя из данных литературы: «Чувство напряжения ткани позволяет врачу выбрать ритм и момент времени для проведения целенаправленной манипуляции» «метод направленного удара в мануальной терапии … в найденной позиции, не меняя положения, с учётом правильного направления», выбирают скорость и амплитуду удара по остистому или поперечному отростку и проводят манипуляции – «как заклёпывающий удар молотка по гвоздю», или «метод сдвигания одного кирпича внутри стопки кирпичей, когда не сдвигаются другие кирпичи» [10].
При приближении частоты внешнего воздействия к резонансной частоте наблюдается значительное возрастание амплитуды колебаний осциллятора [8]. Определив собственную частоту колебательной системы, колебательную скорость и массу колеблющегося элемента, представляется возможным придать физическому телу (например, руке врача или воздействующей части аппарата), действующему извне как внешняя сила на колебательную систему (элемента опорно-двигательного аппарата), такие характеристики скорости и массы, которые позволили бы вызвать колебания с величиной амплитуды, близкой к резонансной [9]. Исходя из данных литературы: «Чувство напряжения ткани позволяет врачу выбрать ритм и момент времени для проведения целенаправленной манипуляции» «метод направленного удара в мануальной терапии … в найденной позиции, не меняя положения, с учётом правильного направления», выбирают скорость и амплитуду удара по остистому или поперечному отростку и проводят манипуляции – «как заклёпывающий удар молотка по гвоздю», или «метод сдвигания одного кирпича внутри стопки кирпичей, когда не сдвигаются другие кирпичи» [10]. Или ещё пример: «Корригирующий толчок, HLVA-High Velocity Low Amplitude (высокой скорости низкой амплитуды), проводимый с целью нормализации в направлении ограничительного физиологического барьера. После точного расположения относительно барьера включается финальная сила, представленная коротким (низкоамплитудным) быстрым (высокочастотным) трастом» [11]. Мы видим, что некоторые врачи, осуществляющие мануальную манипуляцию неосознанно, придерживались принципов реализации колебательного и поступательного резонансов. Учитывая всё вышеизложенное, видится необходимым, чтобы мануальный, или механотерапевт в своей работе ясно представлял основы поступательного и колебательного резонансов и использовал их для большей эффективности проводимого воздействия. Целесообразность этого подтверждает положение, что при резонансе действие внешней силы встречает меньшее сопротивление внутренних сил колебательной системы, возникающих при выведении системы из состояния равновесия. Применительно к опорно-двигательному аппарату, воздействие, выполняемое на высоте резонансных колебаний, будет встречать наименьшее сопротивление окружающих тканей (связок, мышц и т.
Или ещё пример: «Корригирующий толчок, HLVA-High Velocity Low Amplitude (высокой скорости низкой амплитуды), проводимый с целью нормализации в направлении ограничительного физиологического барьера. После точного расположения относительно барьера включается финальная сила, представленная коротким (низкоамплитудным) быстрым (высокочастотным) трастом» [11]. Мы видим, что некоторые врачи, осуществляющие мануальную манипуляцию неосознанно, придерживались принципов реализации колебательного и поступательного резонансов. Учитывая всё вышеизложенное, видится необходимым, чтобы мануальный, или механотерапевт в своей работе ясно представлял основы поступательного и колебательного резонансов и использовал их для большей эффективности проводимого воздействия. Целесообразность этого подтверждает положение, что при резонансе действие внешней силы встречает меньшее сопротивление внутренних сил колебательной системы, возникающих при выведении системы из состояния равновесия. Применительно к опорно-двигательному аппарату, воздействие, выполняемое на высоте резонансных колебаний, будет встречать наименьшее сопротивление окружающих тканей (связок, мышц и т.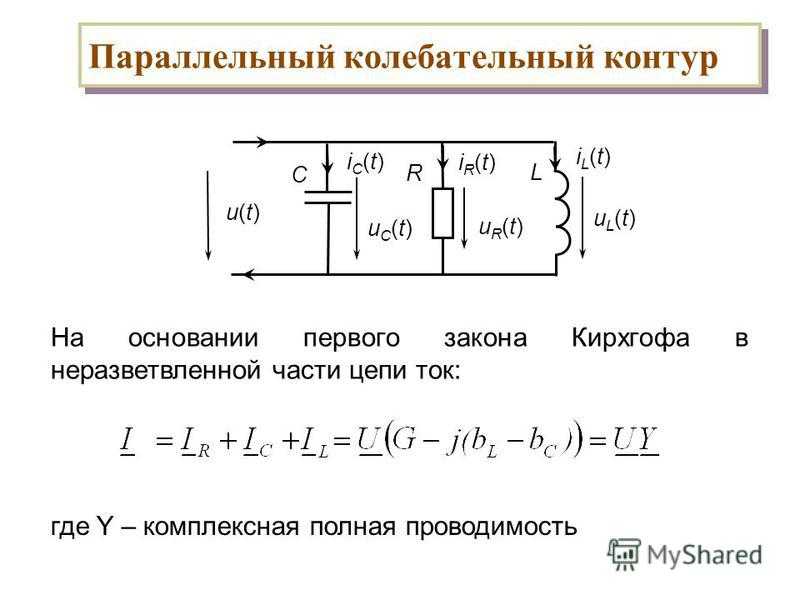 д.), а следовательно, манипуляция будет не только эффективной, но и наименее травматичной. Поэтому был разработан «способ терапии заболеваний опорно-двигательного аппарата» (В.В. Короткий RU 2231351C1 от 17.10.2002) [12], который заключается в следующем. Выбираем необходимый для коррекции элемент опорно-двигательного аппарата. После этого начинаем производить совпадающие с направлением приложения силы слабые, не меняющиеся по силе, повторяемые механические воздействия, приводя систему ткань–элемент опорно-двигательного аппарата в состояние вынужденных механических колебаний. Затем последовательно меняем частоту воздействия от более низких (1–3 Гц) до средних (3–7 Гц) и более высоких частот (7–10 Гц). При совпадении собственной частоты механических колебаний подвергаемого воздействию элемента опорно-двигательного аппарата пациента и частоты воздействия, начинает возникать явление механического резонанса, которое проявляется как снижение механического сопротивления тканей оказываемому воздействию и увеличение амплитуды колебаний элемента опорно-двигательного аппарата в направлении оказываемого воздействия.
д.), а следовательно, манипуляция будет не только эффективной, но и наименее травматичной. Поэтому был разработан «способ терапии заболеваний опорно-двигательного аппарата» (В.В. Короткий RU 2231351C1 от 17.10.2002) [12], который заключается в следующем. Выбираем необходимый для коррекции элемент опорно-двигательного аппарата. После этого начинаем производить совпадающие с направлением приложения силы слабые, не меняющиеся по силе, повторяемые механические воздействия, приводя систему ткань–элемент опорно-двигательного аппарата в состояние вынужденных механических колебаний. Затем последовательно меняем частоту воздействия от более низких (1–3 Гц) до средних (3–7 Гц) и более высоких частот (7–10 Гц). При совпадении собственной частоты механических колебаний подвергаемого воздействию элемента опорно-двигательного аппарата пациента и частоты воздействия, начинает возникать явление механического резонанса, которое проявляется как снижение механического сопротивления тканей оказываемому воздействию и увеличение амплитуды колебаний элемента опорно-двигательного аппарата в направлении оказываемого воздействия. Эти явления у пациентов наступают на разных частотах механического воздействия, в зависимости от индивидуальных особенностей, состояния мышечного тонуса, эластичности связочного аппарата, тургора окружающих тканей, выраженности остеохондроза и т.п. В момент достижения резонанса, не прекращая оказывать слабое механическое воздействие, в нужный момент производят однократное, или повторяемое манипуляционное механическое воздействие, достаточной силы для выполнения запланированной манипуляции. Манипуляция может быть выполнена не только в виде манипуляционного толчка, но и уже после прекращения колебаний путём однократного удара, выполняемого с такой скоростью и таким вложением массы, чтобы они отвечали условиям осуществления поступательного резонанса. Было проведено сравнительное исследование двух групп пациентов с применением различного способа лечения вертеброгенно-дискогенной дорсопатии. В первой группе пациентов, состоящей из 123 пациентов, а именно: 64 женщины (52,03%), средний возраст 40 лет (от 14 до 59 лет) и 59 мужчин (47,97%), средний возраст 40 лет (от 15 до 62 лет), применялся метод механического резонансного манипулирования.
Эти явления у пациентов наступают на разных частотах механического воздействия, в зависимости от индивидуальных особенностей, состояния мышечного тонуса, эластичности связочного аппарата, тургора окружающих тканей, выраженности остеохондроза и т.п. В момент достижения резонанса, не прекращая оказывать слабое механическое воздействие, в нужный момент производят однократное, или повторяемое манипуляционное механическое воздействие, достаточной силы для выполнения запланированной манипуляции. Манипуляция может быть выполнена не только в виде манипуляционного толчка, но и уже после прекращения колебаний путём однократного удара, выполняемого с такой скоростью и таким вложением массы, чтобы они отвечали условиям осуществления поступательного резонанса. Было проведено сравнительное исследование двух групп пациентов с применением различного способа лечения вертеброгенно-дискогенной дорсопатии. В первой группе пациентов, состоящей из 123 пациентов, а именно: 64 женщины (52,03%), средний возраст 40 лет (от 14 до 59 лет) и 59 мужчин (47,97%), средний возраст 40 лет (от 15 до 62 лет), применялся метод механического резонансного манипулирования. Полученные результаты сравнили с результатами 2-й группы, состоящей из 132 пациентов, а именно: 82 женщины (62,12%), средний возраст 49 лет (от 21 до 74 лет) и 50 мужчин (37,88%), средний возраст 43,3 года (от 18 до 69 лет), у которых применялась традиционная мануальная терапия. У больных имелась вертеброгенно-дискогенная дорсопатия, проявляющаяся в равной мере в обеих группах синдромокомплексом цервикотораколюмбалгии, которая в некоторых случаях сопровождалась явлениями радикулопатии. У ряда пациентов имела место сопутствующая соматическая патология. А именно такие заболевания, как язвенная болезнь, бронхиальная астма, ревматизм, дисциркуляторная энцефалопатия, псориаз и другие заболевания. Так, среди больных 1-й группы соматическая патология была у 6 женщин и 2 мужчин, радикулопатия у 8 женщин и 9 мужчин, среди больных 2-й группы соматическая патология была у 11 женщин и 5 мужчин, а радикулопатия у 6 женщин и 6 мужчин. Пациенты обеих групп получали сеансы мануальной терапии пять раз в неделю.
Полученные результаты сравнили с результатами 2-й группы, состоящей из 132 пациентов, а именно: 82 женщины (62,12%), средний возраст 49 лет (от 21 до 74 лет) и 50 мужчин (37,88%), средний возраст 43,3 года (от 18 до 69 лет), у которых применялась традиционная мануальная терапия. У больных имелась вертеброгенно-дискогенная дорсопатия, проявляющаяся в равной мере в обеих группах синдромокомплексом цервикотораколюмбалгии, которая в некоторых случаях сопровождалась явлениями радикулопатии. У ряда пациентов имела место сопутствующая соматическая патология. А именно такие заболевания, как язвенная болезнь, бронхиальная астма, ревматизм, дисциркуляторная энцефалопатия, псориаз и другие заболевания. Так, среди больных 1-й группы соматическая патология была у 6 женщин и 2 мужчин, радикулопатия у 8 женщин и 9 мужчин, среди больных 2-й группы соматическая патология была у 11 женщин и 5 мужчин, а радикулопатия у 6 женщин и 6 мужчин. Пациенты обеих групп получали сеансы мануальной терапии пять раз в неделю.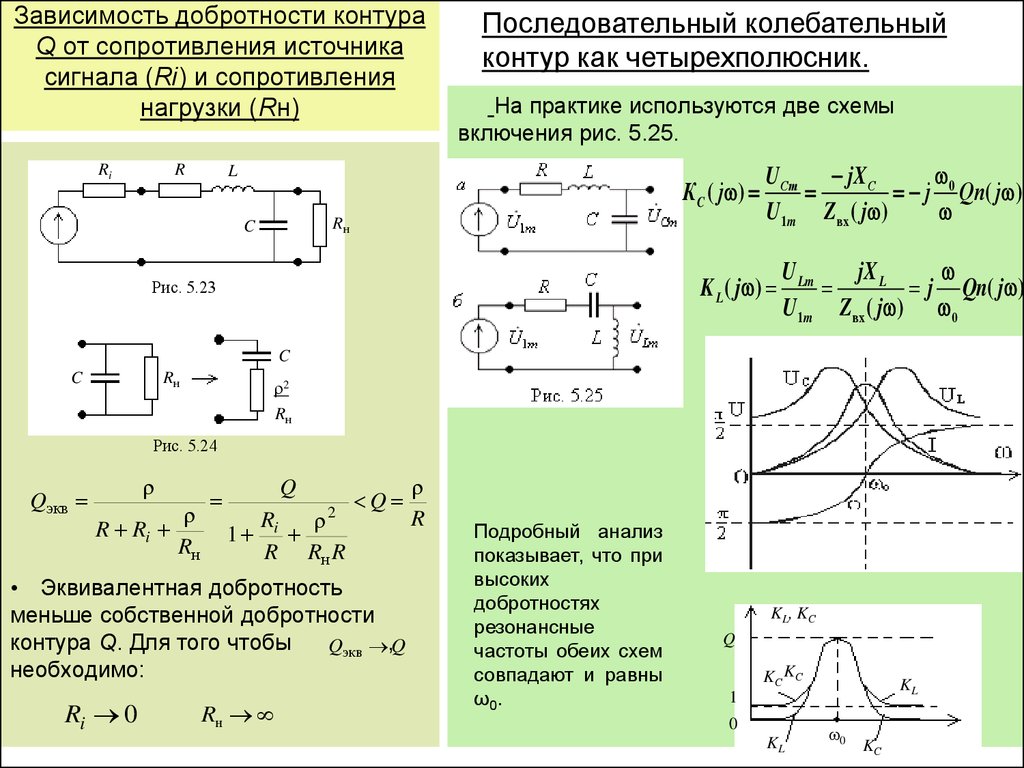 Во время каждого сеанса лечению подвергали все отделы позвоночника. Все больные дополнительно к мануальной терапии получали физиотерапевтическое лечение в рамках медико-экономического стандарта. Оценку состояния пациентов проводили по результатам неврологического осмотра и мануальной диагностики.
Во время каждого сеанса лечению подвергали все отделы позвоночника. Все больные дополнительно к мануальной терапии получали физиотерапевтическое лечение в рамках медико-экономического стандарта. Оценку состояния пациентов проводили по результатам неврологического осмотра и мануальной диагностики.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ В результате проведенного лечения было выявлено значительное увеличение подвижности позвоночно-двигательных сегментов у пациентов 1-й группы, которое удавалось достигать за 3–5 сеансов терапии. При этом подвижность возрастала равномерно во всех позвоночно-двигательных сегментах и практически до величины физиологической нормы. У пациентов 2-й группы существенного увеличения подвижности удавалось добиться только к 10–12-му сеансу терапии, при этом, в сравнении с МРМ, сеансы мануальной терапии воспринимались пациентами как более болезненные. В связи с этим необходимый курс терапии составил для больных 1-й группы в среднем 6–7 сеансов (от 2 до 12), а для больных 2-й группы в среднем 9–10 сеансов терапии (от 2 до 20). Причём у больных 2-й группы так и не удалось к концу курса терапии добиться такого же возрастания подвижности по её амплитудным показателям и равномерности распределения по позвоночно-двигательным сегментам, как у пациентов 1-й группы. Таким образом, выявлено, что применение МРМ является более эффективным, менее травматичным, менее болезненным способом механотерапии и может применяться в широкой лечебной практике. При формировании нового поколения аппаратов для механотерапии опорно-двигательной системы нужно придавать им свойства обнаружения, по принципу обратной связи, массы и скорости перемещения элемента опорно-двигательного аппарата, подвергаемого колебательному воздействию, что позволит воспроизводить не только необходимые условия для колебательного резонанса, но и в каждом цикле колебания, в любой момент времени реализовывать и поступательный резонанс. ЗАКЛЮЧЕНИЕ Применение механо-резонансного манипулирования (МРМ) элемента опорно-двигательного аппарата во время механической манипуляции на высоте его резонансных колебаний делает манипуляцию не только более эффективной, но главное, менее травматичной для биологических тканей, в сравнении с традиционно осуществляемой манипуляцией.
Причём у больных 2-й группы так и не удалось к концу курса терапии добиться такого же возрастания подвижности по её амплитудным показателям и равномерности распределения по позвоночно-двигательным сегментам, как у пациентов 1-й группы. Таким образом, выявлено, что применение МРМ является более эффективным, менее травматичным, менее болезненным способом механотерапии и может применяться в широкой лечебной практике. При формировании нового поколения аппаратов для механотерапии опорно-двигательной системы нужно придавать им свойства обнаружения, по принципу обратной связи, массы и скорости перемещения элемента опорно-двигательного аппарата, подвергаемого колебательному воздействию, что позволит воспроизводить не только необходимые условия для колебательного резонанса, но и в каждом цикле колебания, в любой момент времени реализовывать и поступательный резонанс. ЗАКЛЮЧЕНИЕ Применение механо-резонансного манипулирования (МРМ) элемента опорно-двигательного аппарата во время механической манипуляции на высоте его резонансных колебаний делает манипуляцию не только более эффективной, но главное, менее травматичной для биологических тканей, в сравнении с традиционно осуществляемой манипуляцией.
СПИСОК ИСТОЧНИКОВ 1. Хроническая боль в спине. Клинические рекомендации. Общероссийская общественная организация «Ассоциация врачей общей практики (семейных врачей) Российской Федерации» М. – СПб. – Ростов-наДону, 2014 раздел 3. Эпидемиология. 2. Ситель А.Б. Мануальная терапия руководство для врачей. М.: Издатцентр «Русь», 1998. С. 8–9. 3. Левит К. Мануальная терапия в рамках врачебной реабилитации. Винница: Винницкий гос. мед. университет им. Н.И. Пирогова, 1997. С. 15–18. 4. Набойченко В.Н., Данилов И.М. Мануальная терапия от «А» до «Я»: учебно-практическое пособие. Киев: Атика, 2004. С. 12. 5. Гиппократ. Избранные книги. Гиппократ. Перевод с греческого В.И. Руднева. Редакция, вступительные статьи и примеч. В.П. Карпова. М.–Л.: Государственное издательство биологической и медицинской литературы (Биомедгиз), 1936. Серия «Классики биологии и медицины». С. 87. 6. Экологическая физиология человека. Адаптация человека к экстремальным условиям среды. М.: «Наука», 1979. С. 294. С. 298–299. Серия «Руководство по физиологии». 7. Лувсан Гаваа. Традиционные и современные аспекты восточной рефлексотерапии. М.: «Наука», 1986. С. 435–436. 8. Большой энциклопедический словарь. Физика. Гл. ред. А.М. Прохоров. М.: Научное издательство «Большая Российская энциклопедия», 1999. С. 630. 9. Зверев Г.Я. Физика без механики Ньютона, без теории Эйнштейна и без принципа наименьшего действия. Изд. 2-е, перераб. и доп. М.: Ком Книга, 2005 (Relato Refero). С. 43–45. 10. Бочков А.С, Новосельцев С.В. Теория траста // Мануальная терапия. 2019. № 1(73). С. 70. 11. Ситель А.Б. Мануальная терапия (суставная мобилизационная и манипуляционная техники, методы мышечной релаксации, показания и противопоказания) // Мануальная терапия. 2017. № 4(68). С. 42–77. 12. Короткий В.В. Способ терапии заболеваний опорно-двигательного аппарата. RU 2231351 C 1 от 17.10.2002 г
Серия «Руководство по физиологии». 7. Лувсан Гаваа. Традиционные и современные аспекты восточной рефлексотерапии. М.: «Наука», 1986. С. 435–436. 8. Большой энциклопедический словарь. Физика. Гл. ред. А.М. Прохоров. М.: Научное издательство «Большая Российская энциклопедия», 1999. С. 630. 9. Зверев Г.Я. Физика без механики Ньютона, без теории Эйнштейна и без принципа наименьшего действия. Изд. 2-е, перераб. и доп. М.: Ком Книга, 2005 (Relato Refero). С. 43–45. 10. Бочков А.С, Новосельцев С.В. Теория траста // Мануальная терапия. 2019. № 1(73). С. 70. 11. Ситель А.Б. Мануальная терапия (суставная мобилизационная и манипуляционная техники, методы мышечной релаксации, показания и противопоказания) // Мануальная терапия. 2017. № 4(68). С. 42–77. 12. Короткий В.В. Способ терапии заболеваний опорно-двигательного аппарата. RU 2231351 C 1 от 17.10.2002 г
конденсатор — Связь между резонансной частотой и сопротивлением в последовательной цепи RLC
спросил
Изменено 6 лет, 1 месяц назад
Просмотрено 7к раз
\$\начало группы\$
смоделируйте эту схему – Схема создана с помощью CircuitLab
У меня есть последовательная цепь RLC, и я рассчитал резонансную частоту.
Во втором эксперименте я использую резистор вдвое меньше, чем в приведенной выше схеме. Как это повлияет на мою резонансную частоту теперь?
Пример:
Эксперимент 1: C = 100 нФ, L = 100 мГн, R = 100 Ом
Эксперимент 2: C = 100 нФ, L = 100 мГн, R = 50 Ом
Меняется только резистор. Ничего больше.
- конденсатор
- частота
- пассивные сети
- резонанс
- связь
\$\конечная группа\$
3
Как это повлияет на мою резонансную частоту
Теоретически это не повлияет на резонансную частоту. Резонансная частота определяется только тем, что конденсатор имеет прямо противоположное реактивное сопротивление индуктора при соответствует конкретной частоте , и два реактивных сопротивления компенсируются, оставляя последовательно настроенную цепь, имеющую только сопротивление в резонансе.
Однако при более низких значениях сопротивления форма пика резонанса изменится, но центральная точка пика останется прежней.
\$\конечная группа\$
5
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.