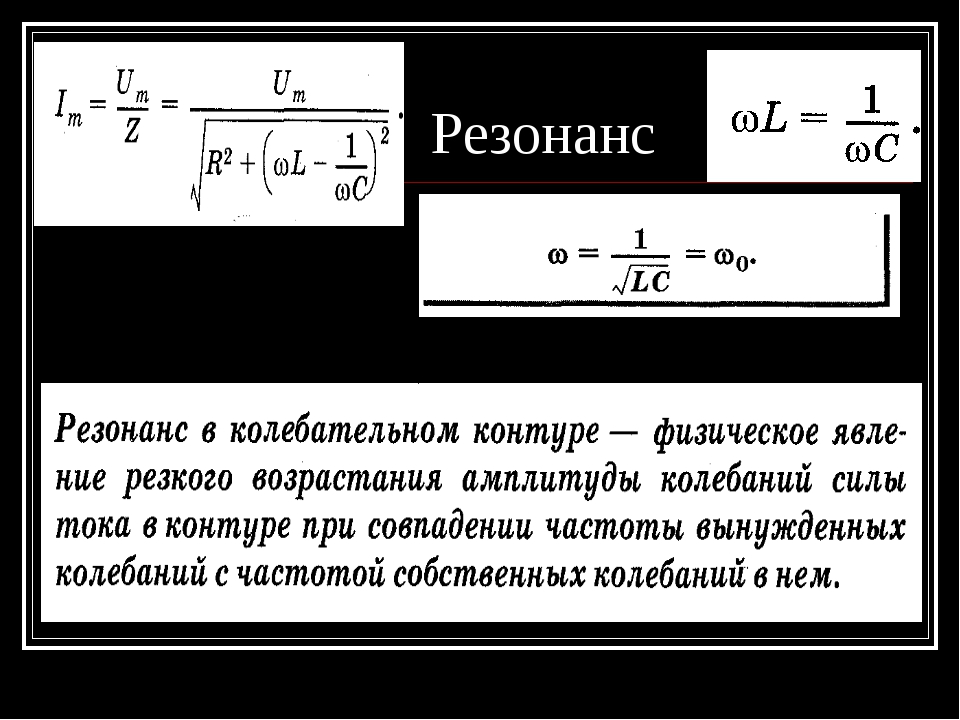
2.4.3 Методика расчета резонансных характеристик. Кривые подвода-отвода
В пункте 2.4.2 был приведен приближенный метод решения уравнения движения зонда в произвольном потенциале. Как было показано резонансные характеристики системы зонд-образец имеет следующий вид:
(1)
(2)
Однако уравнения (1,2) связывают амплитуду, фазу и частоту вынуждающей силы в неявной форме. Для того, чтобы облегчить расчет резонансных характеристик рассмотрим следующую методику. Выразим в (1) обратную зависимость частоты вынуждающей силы от амплитуды колебаний. Проделывая не сложные выкладки, получим:
(3)
Выражение (3) описывает две ветви АЧХ системы, при этом знак «+» соответствует ветви , а знак «-» – ветви . Здесь введено новое обозначение . Но теперь, несмотря на наличие двух ветвей вместо одной, зависимость частоты от амплитуды колебаний имеет явную форму. Далее, используя выражение (2), получим полные резонансные характеристики системы:
(4)
(5)
где амплитуда колебаний выступает как параметр, который пробегает значения в интервале
.
Обе ветви сшиваются в точке с максимальной амплитудой колебаний (резонанс) . Данному значению амплитуды колебаний соответствует частота вынуждающей силы . Таким образом, резонансная частота системы при расстоянии зонд-образец равном .
Теперь можно записать, как изменяется резонансная частота системы при изменении расстояния зонд образец. Вспоминая значение вспомогательной функции (см. (9) пункта 2.4.2), получим для относительного сдвига резонансной частоты:
(6)
Таким образом, зависимость изменения резонансной частоты колебаний кантилевера при отводе его от образца содержит информацию о виде потенциала взаимодействия.
Если же амплитуда колебаний мала, т.е. , то выражение (6) можно переписать в виде:
(7)
где введено обозначение
сила взаимодействия между зондом и образцом. Вспоминая теорию малых колебаний кантилевера в поле силы
, сдвиг резонансной частоты в том случае в точности совпадает с выражением (7).
Для нахождения зависимости изменения амплитуды колебаний при отводе зонда от образца будем считать, что кантилевер возбуждается на частоте равной его собственной резонансной частоте при отсутствии взаимодействия зонд-образец, т.е. и, соответственно, . Исходя из вида АЧХ системы, легко получить, что в этом случае для амплитуды колебаний должно выполняться:
(8)
Выражение (8) можно записать в виде , которое задает вид зависимости амплитуды колебаний от расстояния зонд-образец. При этом в некоторых случаях (в зависимости от вида потенциала взаимодействия и расстояния зонд-образец) решение (8) неоднозначно, что соответствует случаю одновременного существования нескольких режимов колебаний с различной амплитудой и, соответственно, фазой, т.к. из (2) фаза колебаний является однозначной функцией от амплитуды.
Рассмотрим, что произойдет в случае малости колебаний. Как уже было показано в случае со сдвигом резонансной частоты колебаний, в этом случае выполняется:
(9)
Подставляя (9) в выражение (8), получим
(10)
Если вертикальный градиент силы взаимодействия зонд-образец мал (сила слабо меняется на амплитуде колебаний), то относительное изменение амплитуды можно выразить в виде:
(11)
Сравнив полученное выражение с изменением амплитуды, вычисленным в теории малых колебаний, легко убедиться, что обе теории дают полностью идентичные ответы.
Теперь рассмотрим сдвиг фазы колебаний, которые происходит при отводе зонда от поверхности образца. Как и в случае с амплитудой будет считать, что . С учетом (2) получим
(12)
Используя условие малости колебаний (9) выражение (12) преобразуется к виду:
(13)
который опять в точности соответствует выведенному в теории малых колебаний.
- Предложен метод расчета резонасных характеристик системы зонд-образец при произвольной амплитуде вынуждающей силы. Он позволяет в явной форме вычислить частоту и фазу колебаний, соответствующие определенной амплитуде колебаний. При этом отпадает необходимость решать неявную нелинейную систему уравнений (1, 2).
- Из вида резонансных характеристик системы выведены зависимости амплитуды, резонасной частоты и фазы колебаний при подводе-отводе зонда от образца.
- Показано, что в пределе малых амплитуд , теория возмущений дает результаты полностью идентичные полученным в теории малых колебаний кантилевера.


Резонанс шагового двигателя — статья
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.
Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие
колебания. Дело
в том, что систему ротор – магнитное поле – статор можно рассматривать как пружинный маятник, частота
колебаний
которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной
конфигурации
магнитного поля, резонансная частота ротора зависит от амплитуды колебаний.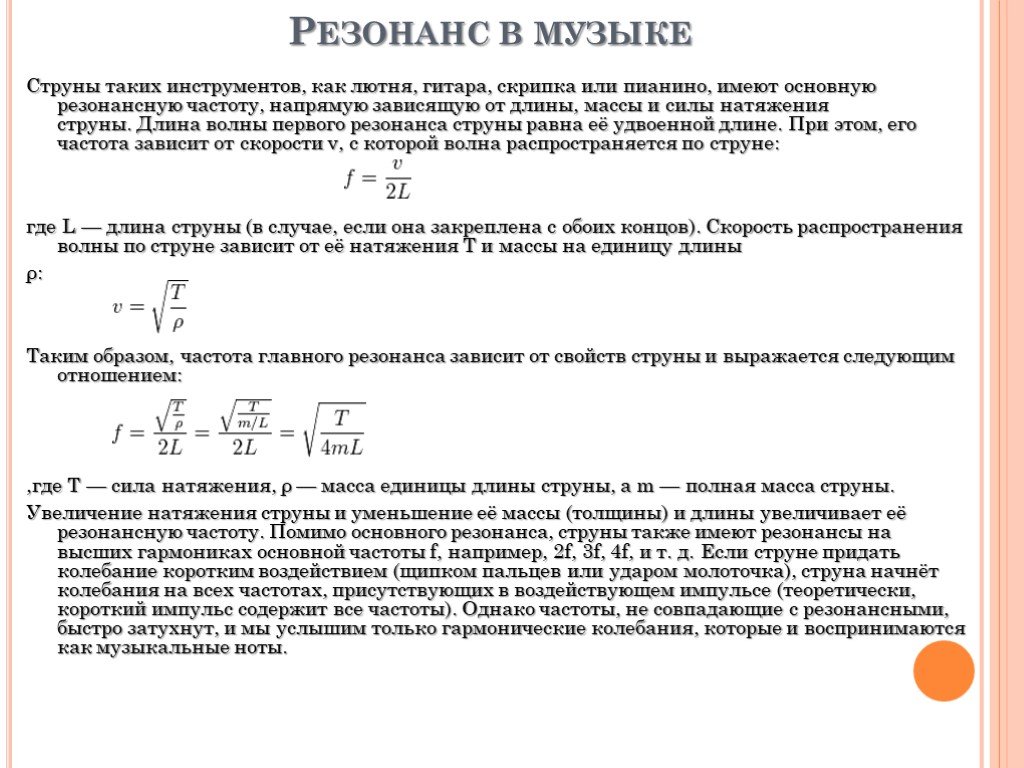
Резонансная частота вычисляется по формуле:
F0 = (N*TH/(JR+JL))0.5/4*pi,
где F0 – резонансная частота,
N – число полных шагов на оборот,
TH – момент удержания для используемого способа управления и тока фаз,
JR – момент инерции ротора,
JL – момент инерции нагрузки.
Необходимо заметить, что резонансную частоту определяет момент инерции собственно ротора двигателя плюс
момент
инерции нагрузки, подключенной к валу двигателя.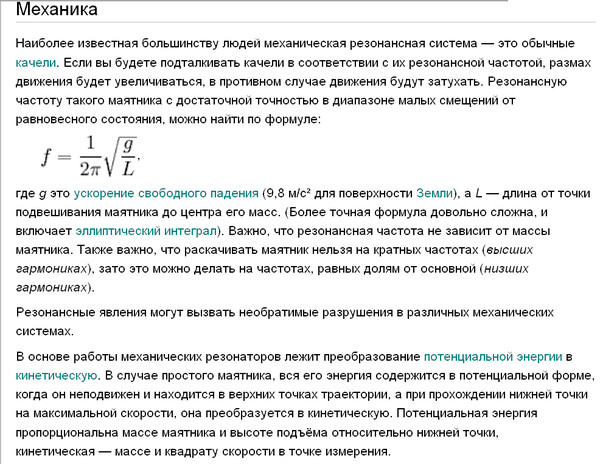
купить шаговый двигатель
купить блок управления шаговым двигателем
На практике эффект резонанса приводит к трудностям при работе на частоте, близкой к резонансной. Момент на частоте резонанса равен нулю и без принятия специальных мер шаговый двигатель не может при разгоне пройти резонансную частоту. В любом случае, явление резонанса способно существенно ухудшить точностные характеристики привода.
В системах с низким демпфированием существует опасность потери шагов или повышения шума, когда двигатель
работает
вблизи резонансной частоты.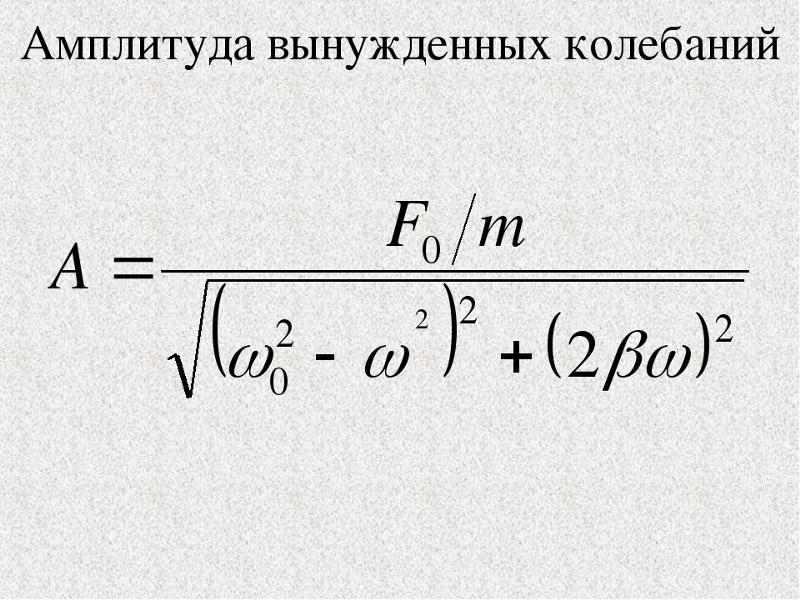 В некоторых случаях проблемы могут возникать и на гармониках частоты основного
резонанса.
В некоторых случаях проблемы могут возникать и на гармониках частоты основного
резонанса.
Для борьбы с резонансом можно использовать различные методы. Например, применение эластичных материалов при
выполнении механических муфт связи с нагрузкой. Эластичный материал способствует поглощению энергии в
резонансной
системе, что приводит к затуханию паразитных колебаний. Другим способом является применение вязкого трения.
Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного для борьбы с резонансом можно
использовать различные методы. Например, применение эластичных материалов при выполнении механических муфт
связи с
нагрузкой. Эластичный материал способствует поглощению энергии в резонансной системе, что приводит к
затуханию
паразитных колебаний. Другим способом является применение вязкого трения. Выпускаются специальные демпферы,
где внутри
полого цилиндра, заполненного вязкой кремнийорганической смазкой, может вращаться металлический диск. При
вращении
этой системы с ускорением диск испытывает вязкое трение, что эффективно демпфирует систему.
Эластичный материал способствует поглощению энергии в
резонансной
системе, что приводит к затуханию паразитных колебаний. Другим способом является применение вязкого трения.
Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного для борьбы с резонансом можно
использовать различные методы. Например, применение эластичных материалов при выполнении механических муфт
связи с
нагрузкой. Эластичный материал способствует поглощению энергии в резонансной системе, что приводит к
затуханию
паразитных колебаний. Другим способом является применение вязкого трения. Выпускаются специальные демпферы,
где внутри
полого цилиндра, заполненного вязкой кремнийорганической смазкой, может вращаться металлический диск. При
вращении
этой системы с ускорением диск испытывает вязкое трение, что эффективно демпфирует систему.
Существуют электрические методы борьбы с резонансом. Колеблющийся ротор приводит к возникновению в обмотках
статора
ЭДС. Если закоротить обмотки, которые на данном шаге не используются, это приведет к демпфированию
резонанса.
Колеблющийся ротор приводит к возникновению в обмотках
статора
ЭДС. Если закоротить обмотки, которые на данном шаге не используются, это приведет к демпфированию
резонанса.
И, наконец, существуют методы борьбы с резонансом на уровне алгоритма работы драйвера шагового двигателя. Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы.
Если это возможно, при старте и остановке нужно использовать частоты выше резонансной. Увеличение момента инерции системы ротор-нагрузка уменьшает резонансную частоту.
Самой эффективной мерой для борьбы с резонансом является применение микрошагового
режима.
Резонанс в трубах и струнах – звук
Резонанс – это явление, при котором движущая сила малой амплитуды может вызвать движение большой амплитуды.
Стоячие волны заставляют струну резонировать или вибрировать на своей собственной частоте или резонансной частоте. Поскольку скорость для данной среды постоянна, уравнение V=fλ можно использовать для нахождения резонансной частоты для любой заданной длины волны, создающей стоячую волну.
Все механические конструкции имеют собственные частоты, на которых они резонируют. Если к конструкции приложена внешняя движущая сила на резонансной частоте, конструкция будет испытывать максимальную вибрацию и максимальную амплитуду смещения. Состояние, при котором собственная частота и частота возбуждения равны, также называется резонансом . Резонирующая струна показывает, что движущей силой является отраженная волна.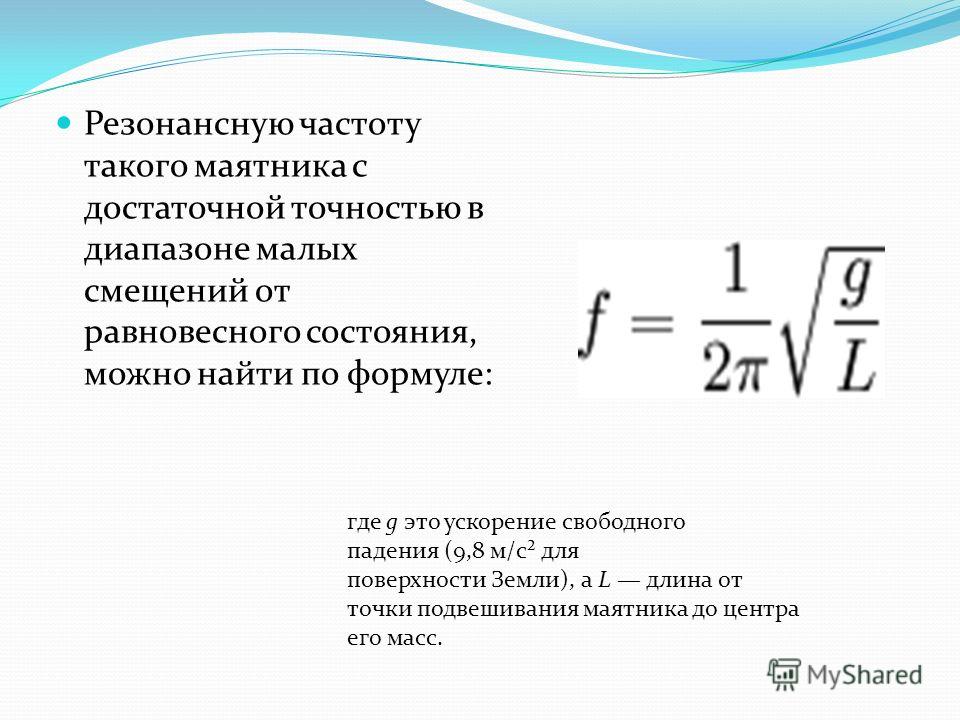 В неидеальной ситуации энергия теряется на демпфирование на резонансной частоте и должна быть заменена некоторой внешней движущей силой на той же частоте.
В неидеальной ситуации энергия теряется на демпфирование на резонансной частоте и должна быть заменена некоторой внешней движущей силой на той же частоте.
В случае струны один или оба конца могут быть прикреплены к точке. Для трубы один или оба конца могут быть открыты. Если струна закреплена на обоих концах (например, как на гитаре), концы струны будут состоять из узлов . Эти точки удерживаются на месте и не могут вибрировать. Для струны, закрепленной только на одном конце, пучность будет располагаться на незакрепленном конце, потому что, в отличие от неподвижной точки, эта точка будет двигаться. Если установилась стоячая волна, то ни одна точка струны не будет иметь большего смещения, чем незакрепленный конец, поэтому ее смещение будет равно амплитуда волны.
Трубы создают продольных волн , тогда как струны создают поперечных волн . Поперечные волны используются в трубчатых диаграммах, чтобы упростить иллюстрацию движения частиц.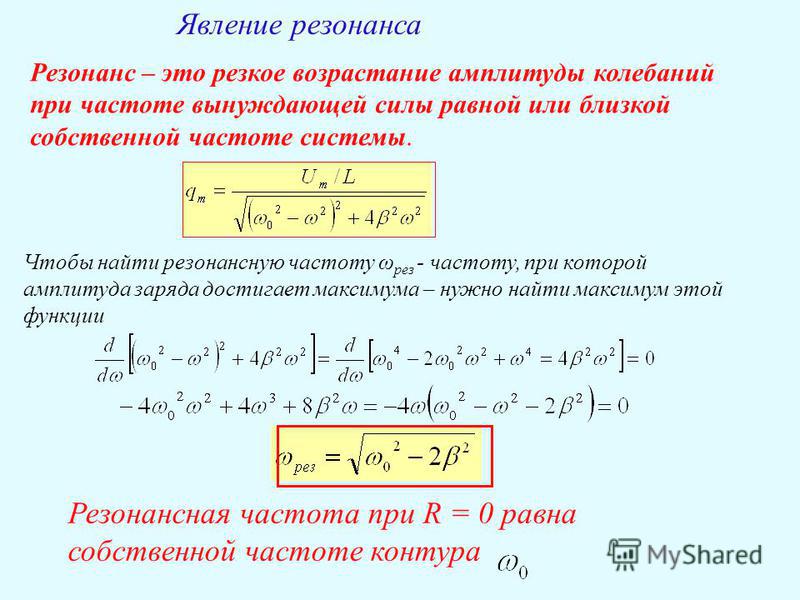 В областях с узлами частицы в стоячей волне имеют нулевое смещение. Области с пучностями содержат частицы с максимальным смещением. Излучающая труба должна быть открытой, поскольку возмущения в жидкости вне частиц воздуха на открытом конце или концах должны двигаться с максимальным смещением. Продольная волна распространяется за счет колебаний составляющих ее частиц. Чтобы представить себе распространение продольной волны, подумайте о частицах, как о людях в переполненном вагоне метро. Некоторых людей толкает больше, чем других, когда машину трясет. Вибрации не сместят людей, прислонившихся к стене в конце вагона, потому что они зажаты между твердой поверхностью и толпой.
В областях с узлами частицы в стоячей волне имеют нулевое смещение. Области с пучностями содержат частицы с максимальным смещением. Излучающая труба должна быть открытой, поскольку возмущения в жидкости вне частиц воздуха на открытом конце или концах должны двигаться с максимальным смещением. Продольная волна распространяется за счет колебаний составляющих ее частиц. Чтобы представить себе распространение продольной волны, подумайте о частицах, как о людях в переполненном вагоне метро. Некоторых людей толкает больше, чем других, когда машину трясет. Вибрации не сместят людей, прислонившихся к стене в конце вагона, потому что они зажаты между твердой поверхностью и толпой.
Когда труба закрыта с одного конца, молекулы, прилегающие к этому концу, не могут колебаться. Если входящая волна смещает близлежащие молекулы, они будут сталкиваться с молекулами у конца трубы. Молекулы на конце отскочат от конца и снова столкнутся с соседними молекулами, изменяя направление волны. По этой причине закрытый конец трубы является узлом для перемещения частиц.
Практические вопросы
MCAT Официальная подготовка (AAMC)
Физические онлайн -карточки Вопрос 1
Physics Вопрос. Вопрос 41
Ключевые пункты
. движущая сила с малой амплитудой может вызвать движение с большой амплитудой.
• Стоячие волны заставляют струну резонировать или вибрировать на ее собственной частоте или резонансной частоте.
• Состояние, при котором собственная частота и частота возбуждения равны, также называется резонансом.
• В случае струны один или оба конца могут быть прикреплены к точке. Для струны, закрепленной только с одного конца, пучность будет располагаться на незакрепленном конце. Если установлена стоячая волна, то никакая точка струны не будет иметь большего смещения, чем незакрепленный конец, поэтому ее перемещение будет равно амплитуде волны.
• Трубы создают продольные волны, а струны – поперечные волны.
• Продольная волна распространяется за счет колебаний составляющих ее частиц.
• Когда труба закрыта с одного конца, молекулы, примыкающие к этому концу, не могут колебаться. Закрытый конец трубы является узлом перемещения частиц.
Ключевые термины
Резонанс : Явление, при котором внешняя сила или вибрирующая система заставляет другую систему вокруг себя вибрировать с большей амплитудой на заданной рабочей частоте.
Собственная частота / резонансная частота: Частота, на которой система склонна колебаться в отсутствие какой-либо движущей или демпфирующей силы.
Резонансный узел : Где не происходит смещения материала.
Пучность : Там, где происходит максимальное смещение материала.
Стоячая волна : Вибрация системы, в которой некоторые отдельные точки остаются неподвижными, а другие между ними вибрируют с максимальной амплитудой.
Амплитуда : Максимальная степень вибрации или колебания, измеренная от положения равновесия.
Продольная волна : Волна, колеблющаяся в направлении распространения.
Поперечная волна : Волна, колеблющаяся под прямым углом к направлению ее распространения.
Уравнение резонансной частоты: механика, электричество и акустика
Резонансная частота может применяться во многих областях физических наук или техники. Таким образом, существует более одного уравнения резонансной частоты, в зависимости от области, которую вы изучаете — например, электротехники, акустики или машиностроения.
В этой статье мы начнем с того, что на самом деле представляет собой резонансная частота, прежде чем исследовать, как она применяется в различных областях и как она рассчитывается.
Определение резонансной частоты
Резонанс — это физическая реакция в вибрирующей системе, при которой определенные частоты вызывают колебания с более высокой амплитудой, чем обычно.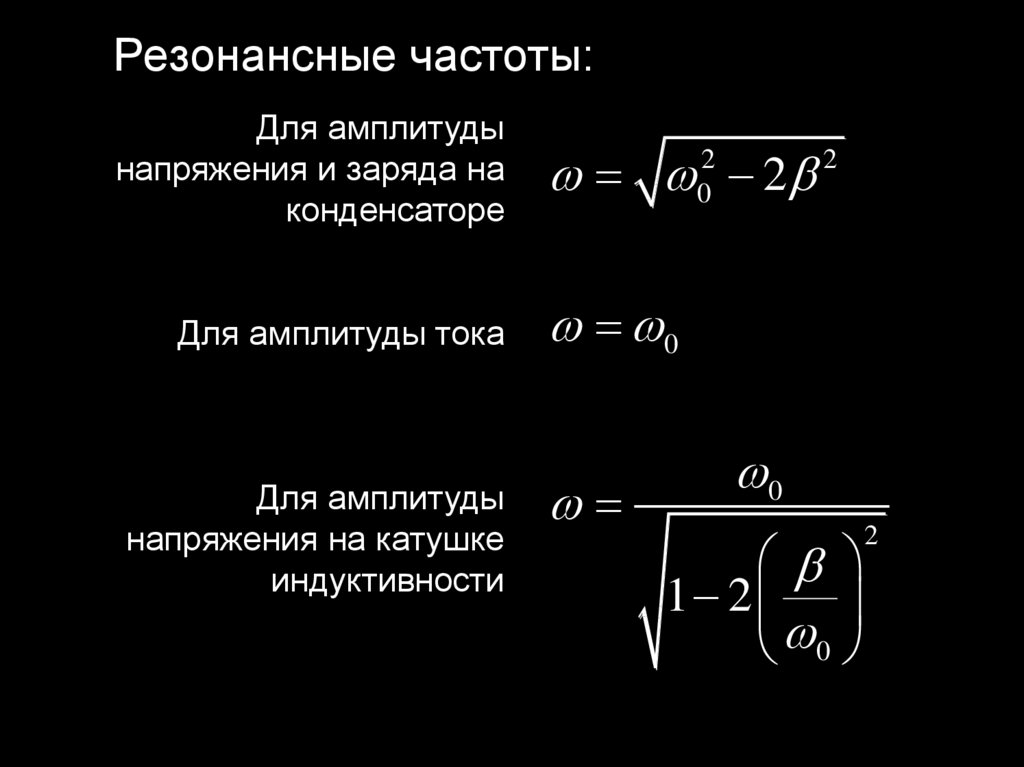
Частота или частоты, которые достигают максимальной амплитуды, известны как резонансные частоты. На этих частотах силы с относительно малым периодом могут вызывать значительные колебания.
Резонансная частота возникает при передаче энергии различных типов, например, в случае маятника, когда потенциальная энергия переходит в кинетическую энергию и наоборот в циклах. Однако каждый цикл маятника вызывает потерю энергии, известную как затухание. Если демпфирование очень мало, то резонансная частота близка к собственной частоте системы.
В простейшем случае для одиночной непрерывной волны резонансная частота f определяется уравнением:
f=v/λ
где v — скорость волны, λ — длина волны.
Когда упоминается резонанс, большинство людей думают об обрушении моста Такома-Нарроуз, хотя это ошибочное мнение. Было показано, что отказ на самом деле был вызван отдельным явлением, называемым аэростатическим флаттером.
Типы резонансной частоты
Как правило, резонанс возникает всякий раз, когда присутствует любой тип вибрации или волны. Поэтому существуют различные типы резонанса и резонансной частоты, включая механический, акустический, электрический, оптический, орбитальный и атомный резонанс.
Поэтому существуют различные типы резонанса и резонансной частоты, включая механический, акустический, электрический, оптический, орбитальный и атомный резонанс.
В этой статье мы сосредоточимся на уравнениях резонансной частоты механического, акустического и электрического резонанса.
Уравнение механической резонансной частоты
Механическая резонансная частота – это собственная частота вибрации, присутствующая в механических системах. Когда частота колебаний, вызванных внешними силами, такими как ветер, совпадает с резонансной частотой, амплитуда колебаний будет увеличиваться, что может вызвать чрезмерное раскачивание таких конструкций, как здания или мосты. Поэтому большинство конструкций, подверженных этому явлению, снабжены демпферами, чтобы снизить риск катастрофы.
Наиболее распространенное уравнение, используемое для расчета механической резонансной частоты, основано на модели простой механической системы пружины, удерживающей груз.
Резонансная частота системы f определяется следующим образом:
f=1/2π √(k/m)
m – масса подвешенного груза, а k – жесткость пружины.
Уравнение электрической резонансной частоты
Во многих цепях электрическая резонансная частота является результатом того, что импеданс между входом и выходом цепи равен нулю, а передаточная функция близка к единице.
В LC-цепи, т. е. включающей катушки индуктивности и конденсаторы, энергия передается от тока конденсатора к магнитному полю катушки индуктивности и наоборот, подобно передаче энергии в механическом маятнике. Он часто используется при настройке беспроводных радиопередач из-за используемых уникальных частот.
Уравнение, используемое для расчета электрической резонансной частоты f в LC-цепи, выглядит следующим образом:
f=1/(2π√LC)
где L — индуктивность, а C — емкость.
Уравнение акустической резонансной частоты
Акустически-резонансные объекты обычно имеют несколько резонансных частот. Гармонические диапазоны будут демонстрировать наибольший резонанс для любого данного инструмента. Струнный инструмент будет сильно вибрировать на резонансных частотах и в меньшей степени на других частотах. Производители музыкальных инструментов часто изучают и измеряют акустический резонанс, поскольку это полезно при проектировании и создании инструмента.
Производители музыкальных инструментов часто изучают и измеряют акустический резонанс, поскольку это полезно при проектировании и создании инструмента.
Акустический резонанс может создавать сильные разрушительные колебания, когда высота звука соответствует резонансной частоте, например, винного бокала.
В случае струнных инструментов, если мы рассмотрим волну, бегущую по струне со скоростью v, резонансная частота f определяется по формуле: длина струны, закрепленная на каждом конце.
Заключение
Резонансная частота — это физическое явление, возникающее при наличии волн или вибраций. В механических системах это очень важное соображение, особенно в крупных строительных проектах, поскольку вероятность механического отказа высока при правильных условиях. Поэтому инженеры-конструкторы часто используют уравнение резонансной частоты, чтобы определить наилучшее демпфирование, которое можно использовать для уменьшения колебаний.
Подробнее о мостах:
- Обрушение тайваньского моста: недавняя катастрофа, которой можно было избежать
- Инженерные катастрофы: обрушение моста Такома-Нарроуз (1940)
- Инженерные катастрофы: 25 худших инженерных ошибок в истории!
- Почему в 1964 году обрушился мост Урданета?
- Обрушение Генуэзского моста в 2018 году – как это произошло, можно ли было его избежать?
- 10 величайших инженерных достижений
- Типы мостов.