
асинхронный двигатель общепромышленного применения — Юг-привод
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ И АСИНХРОННЫЕ ДВИГАТЕЛИ ОБЩЕПРОМЫШЛЕННОГО ПРИМЕНЕНИЯ
Иногда наши Заказчики спрашивают, могут ли асинхронные двигатели общепромышленного применения работь с преобразователями частоты. Технические условия завода-изготовителя не предусматривают испытания стандартного асинхронного двигателя при питании его от преобразователя частоты, поэтому Международным электротехническим комитетом был принят стандарт МЭК 34-17 «Асинхронные двигатели с короткозамкнутым ротором, которые питаются от преобразователей частоты». Первая редакция стандарта была выпущена в 1992 году, вторая в 1998 году. В первой редакции МЭК 34-17 были введены дополнительные проверки, которые состоят из трех групп:
• 1 группа — Общая проверка двигателя при питании от преобразователя частоты;
• 2 группа — Проверка двигателя при частоте вращения ротора выше номинальной, при питании от преобразователя частоты;
• 3 группа — Проверка двигателя при частоте вращения ротора ниже номинальной, при питании от преобразователя частоты.
Проверки должны проводиться на заводе-изготовителе электродвигателей или на заводе-изготовителе преобразователей частоты по требованию заказчика. Что вынуждает проводить эти проверки?
1. Выходное напряжение преобразователя частоты имеет форму ШИМ — сигнала, а кабель, соединяющий преобразователь частоты и двигатель, может иметь длину 100 м. и более. Если волновое сопротивление кабеля и обмотки двигателя не согласованы, а скорость нарастания выходного напряжения dU/dt высокая, то происходит отражение волны напряжения в оба конца кабеля. Это отражение увеличивает пики напряжения на клеммах двигателя, что может привести к пробою изоляции. Некоторые заводы-изготовители преобразователей частоты проводят их проверку с двигателями общепромышленного применения, и обязательно указывают максимально допустимую длину кабеля. При выборе преобразователя частоты на этот параметр необходимо обратить особое внимание, так как возможное разочарование может длиться намного дольше, чем удовольствие от низкой цены!
Такой подход привел к созданию специальных алгоритмов управления, которые позволяют без ограничений использовать асинхронные двигатели общепромышленного применения с длиной кабеля между преобразователем частоты и двигателем до 300 м. А если возникнет необходимость в установке двигателя на еще большее расстояние, или двигатель имеет повышенные требования к нагрузке изоляции? В таких случаях используют выходные фильтры dU/dt, или выходные LC — фильтры (синусные фильтры). Компания Юг-привод поставляет такие фильтры, разработанные специально для преобразователей частоты.
А если возникнет необходимость в установке двигателя на еще большее расстояние, или двигатель имеет повышенные требования к нагрузке изоляции? В таких случаях используют выходные фильтры dU/dt, или выходные LC — фильтры (синусные фильтры). Компания Юг-привод поставляет такие фильтры, разработанные специально для преобразователей частоты.
2. Некоторые приводные механизмы при регулировании скорости могут войти в механический резонанс. Во избежание проблем механического резонанса необходимо просто пропустить частоты, на которых возникает резонанс,
3. Скорость вращения двигателя при частотном регулировании может значительно отличаться от номинальной скорости. При работе двигателя на скоростях выше номинальной она не должна превышать 1-ю критическую частоту вращения стандартного двигателя, даже в случае жесткого соединения с нагрузкой на валу. Гарантийный резерв — не меньше 25% от критической частоты вращения. Невыполнение этого условия приводит к уменьшению ресурса работы подшипников двигателя, или к аварийной остановке.
Типоразмер (высота оси вращения, мм) | Допустимая максимальная частота вращения, об/мин |
63-100 | 6000 |
112-200 | 4500 |
225-280 | 3600 |
315 (2 полюса) | 3600 |
315 – другие | 3000 |
355, 400 (2 полюса) | 3600 |
355, 400 – другие | 2500 |
При уменьшении частоты вращения ротора асинхронного короткозамкнутого самовентилируемого двигателя ниже номинальной, производительность вентилятора, закрепленного на роторе, также уменьшается, что ухудшает условия охлаждения двигателя и может привести к повышению температуры обмоток статора и подшипников.
Как устранить вибрацию электродвигателя — ООО «СЗЭМО Электродвигатель»
Вибрация электродвигателя приводит к быстрому износу подшипников и снижает надежность агрегата. Вибрирующий ротор подвергает подшипники ударным и толчковым нагрузкам, следствием чего могут быть:
- нарушение масляной пленки;
- подплавление баббита;
- появление сколов и трещин на баббите;
- разрыв сепараторов подшипников качения;
- снижение технологических свойств металла;
- излом/изгиб вала;
- повреждение фундамента и опорной рамы;
- отрыв бочки ротора от вала;
- появление трещин в торцовой крышке и станине статора;
- преждевременный износ изоляции обмоток.

Причины вибрации двигателей
Специалисты условно делят причины вибрации на 2 группы. К первой относятся:
- Некорректная центровка механизма и движка.
- Дефекты подшипников рабочего устройства.
- Дефекты соединительной муфты (износ частей, несоосность отверстий под пальцы, дисбаланс пальцев и полумуфты).
- Дисбаланс ротора рабочего механизма, чаще всего спровоцированный износом лопаток.
- Недостатки фундамента – разрушенный бетон, обрыв сварки на жесткой раме, ошибки при креплении двигателя.
Во вторую группу входят:
- Дисбаланс ротора и двигателя.
- Излом/изгиб вала ротора.
- Трещины в короткозамкнутой обмотке ротора.
- Обрыв стержней обмотки ротора.
- Отделение бочки ротора от вала.
- Слишком большой зазор в подшипниках скольжения.
- Разрушение подшипников качения.
- Слабое крепление узлов двигателя.

Обычно причиной вибрации становятся сразу несколько пунктов из вышеперечисленных. Величина вибрации замеряется вибрографом или виброметром.
Как устранить вибрацию электродвигателя
Прежде чем решать, как устранить вибрацию электродвигателя, необходимо точно установить ее причину. Проверьте, надежно ли закреплен агрегат, не нарушена ли сварка частей фундаментной рамы, не разрушен ли бетон фундамента. При включенном движке определите на ощупь и сравните вибрацию лап, болтов крепления и рамы около лап. Положите палец на стык лапы и болта. Если вы чувствуете, что лапа двигателя вибрирует сильно, а болт вибрирует незначительно или совсем не вибрирует, а при работе они смещаются относительно друг друга, причина – недостаточная затяжка болта. При вибрации лапы и болта проверьте тем же способом разницу вибрации на стыках:
- рамы и лапы;
- вертикальной части рамы и верхней полки;
- верхней и нижней полок и ребра жесткости;
- фундамента и нижней полки рамы.
Также на нарушение прочного сопряжения деталей указывают брызги масла или пузыри в местах стыков.
Разъедание бетона маслом является причиной нарушения сопряжения между фундаментом и рамой. В этом случае остановите движок и удалите весь пропитанный бетон (даже тот, что на вид сохраняет прочность), затем замените его свежим.
При отсутствии видимых дефектов крепления агрегата и рабочего устройства, рамы, фундамента, рассоедините муфту между рабочим механизмом и двигателем и запустите движок на холостом ходу. Если вибрации нет, причина может быть в нарушении центровки, износе полумуфт и/или пальцев, дисбалансе приводного устройства. Вибрация на холостом ходу указывает на дефекты электродвигателя. Отключите его от сети и посмотрите, исчезнет ли вибрация сразу после этого. Если она исчезла – зазор между статором и ротором неравномерен, и его нужно выровнять.
Когда двигатель, запущенный на холостом ходу, вибрирует очень сильно, причины могут быть две – либо неравномерный зазор, либо (если зазор равномерен) обрыв стержня ротора.
- неуравновешенность полумуфты;
- смещение обмотки;
- изгиб вала или трещины на нем;
- отрыв бочки ротора от вала.
Снимите полумуфту и запустите двигатель без нее. Если после этого он работает нормально, значит, полумуфта не сбалансирована. Установите ее на оправку и проточите на токарном станке по всей наружной поверхности. При вибрации агрегата со снятой полумуфтой выньте ротор и проверьте его на предмет отсутствия дефектов на валу и надежности крепления роторной бочки. Если дефектов не обнаружено, отбалансируйте ротор на станке. Дефекты подшипников качения определяются по уровню производимого ими шума и нагреву. Проблема решается заменой подшипников. Дефекты соединительной муфты, являющиеся причиной вибрации, чаще всего вызваны:
- неуравновешенностью полумуфт;
- разным весом пальцев;
- несоосностью отверстий полумуфт;
- неравномерным износом пальцев;
- сильным износом мягких шайб.

Взвесьте пальцы и пару, имеющую одинаковый вес, установите в противоположные отверстия полумуфт. На сработавшихся пальцах замените кожу или резину. Замените полумуфты с несоосными отверстиями.
Резонанс (электродвигатели)
3.14.5
Каждый механический объект имеет свойства массы, жесткости и демпфирования, которые определяют его собственную частоту колебаний. Масса — это объем материала, умноженный на его плотность в
раз. Жесткость зависит от эластичности материала. Демпфирование является мерой способности системы рассеивать вибрационную энергию.
Собственная частота прямо пропорциональна жесткости и обратно пропорциональна массе. Это частота, с которой объект будет вибрировать при ударе.
Такие материалы, как мягкая резина, обладают высоким уровнем демпфирования и низкой жесткостью и имеют тенденцию поглощать и рассеивать вибрацию. Большинство твердых материалов имеют более высокую жесткость и более низкий уровень демпфирования. Коэффициент демпфирования определяет скорость потери энергии в окружающую среду. Коэффициент демпфирования является нелинейным параметром и изменяется со скоростью. Для данной конструкции существует частота, при которой коэффициент демпфирования приближается к нулю, и поэтому поглощается очень мало энергии колебаний.
Коэффициент демпфирования определяет скорость потери энергии в окружающую среду. Коэффициент демпфирования является нелинейным параметром и изменяется со скоростью. Для данной конструкции существует частота, при которой коэффициент демпфирования приближается к нулю, и поэтому поглощается очень мало энергии колебаний.
Резонанс и критические скорости — это частоты, которые определяются собственными частотами, демпфированием и вибрационными силами. Резонанс — это состояние конструкции, при котором частота вибрационной силы, такой как дисбаланс массы, равна собственной частоте системы. Если вибрационная сила создается вращающейся частью, резонанс называется критической скоростью.
Структура или объект могут возбуждаться одной или несколькими вибрационными силами. Вибрационные силы могут быть вызваны различными факторами, в том числе конструкцией, монтажом, изготовлением и износом, либо сила может иметь одну постоянную частоту, как это происходит при неуравновешенности масс.
Вращающийся узел с любым конечным дисбалансом действует как вибровозбудитель и создает силу при вращении. Это называется частотой возбуждения. Когда собственная частота и частота возбуждения совпадают, говорят, что существует состояние резонанса. Когда скорость вращения приближается к резонансной частоте, действие силы увеличивается. На резонансной частоте амплитуды колебаний могут стать очень большими. Если уровень скорости близок к резонансной частоте, очень низкий уровень дисбаланса может по-прежнему генерировать неприемлемые амплитуды вибрации.
Это называется частотой возбуждения. Когда собственная частота и частота возбуждения совпадают, говорят, что существует состояние резонанса. Когда скорость вращения приближается к резонансной частоте, действие силы увеличивается. На резонансной частоте амплитуды колебаний могут стать очень большими. Если уровень скорости близок к резонансной частоте, очень низкий уровень дисбаланса может по-прежнему генерировать неприемлемые амплитуды вибрации.
Когда скорость вращения достигает резонансной частоты, опорная конструкция начинает вибрировать непосредственно от возбуждающей силы (фазовый сдвиг = 0°). По мере увеличения скорости ближе к резонансу фаза начинает сдвигаться до тех пор, пока в резонансе не произойдет сдвиг фазы на 90°. Поскольку скорость вращения продолжает увеличиваться, фаза продолжает изменяться, пока не достигнет оппозиции (фазовый сдвиг = 180°).
Балансировка требует точного знания как величины, так и местоположения дисбаланса, поэтому следует избегать скоростей балансировки, близких к резонансу. Небольшое изменение скорости приведет к большому изменению как количества, так и угла измеряемого сигнала, и результаты будут неверными.
Небольшое изменение скорости приведет к большому изменению как количества, так и угла измеряемого сигнала, и результаты будут неверными.
Иногда оборудование предназначено для подчеркивания резонансной частоты. Камертон или фортепианная струна производят сильные колебания на резонансной частоте, что полезно; однако это не относится к жесткому ротору, где требуется прямо противоположное условие.
Вибрации с большой амплитудой могут вызвать преждевременное усталостное разрушение. Энергия, затрачиваемая на такие колебания, вызывает значительные потери мощности и снижение скорости. Кроме того, уровень шума от вибрации может раздражать оператора, а также наносить ущерб компонентам, окружающим подшипники.
Из этого следует, что по мере увеличения скорости и плотности удержание резонанса вдали от рабочей скорости является важной частью работы проектировщика сборки. Обеспечение того, чтобы скорость балансировки и конструкция инструмента избегали резонанса, является важной частью работы производителей балансировочных станков и инструментов.
Резонанс двигателя и приводной системы Проблемы и решения
Насосы и системы, ноябрь 2008 г.
Механический резонанс возникает, когда внешний источник усиливает уровень вибрации массы или конструкции на ее собственной частоте. Для вращающейся массы, такой как двигатель или насос, это происходит при критической скорости (скоростях). Электрический резонанс усиливает величину напряжения или тока, или того и другого.
Увеличение амплитуды, будь то механическое или электрическое, увеличивает нагрузку на компоненты двигателя и насоса, отрицательно влияет на работу (например, повышенная вибрация, нестабильность и потребление энергии) и приводит к преждевременному выходу из строя.
При питании от внешнего источника энергии резонанс может увеличиваться по величине до тех пор, пока не произойдет неисправность. Механический резонанс может привести к поломке двигателя, привода и компонентов насоса; электрический резонанс может привести к выходу из строя обмоток двигателя. В этой статье обсуждаются оба типа резонанса и приводятся решения для каждого из них.
В этой статье обсуждаются оба типа резонанса и приводятся решения для каждого из них.
Резонанс механической системы
Двигатель и нагрузка, например, насос, составляют «двухмассовую систему» и обычно связаны устройствами передачи мощности, такими как редукторы, ремни и муфты. Как показано на рис. 1, каждый из этих соединительных компонентов слегка скручивается, как пружина, когда двигатель прикладывает крутящий момент. Резонанс механической системы, который может возникнуть, если какие-либо собственные частоты находятся в пределах диапазона скоростей, обычно вызывается податливостью («податливостью» или отсутствием жесткости) между двигателем и его нагрузкой. Свидетельством проблемы является повышенная вибрация на собственной частоте. Мотор также может издавать чистый тон, как у камертона, начать «рычать» или стать нестабильным.
Каждая двухмассовая система имеет по крайней мере одну частоту, на которой она хочет колебаться, и это ее частота механического резонанса. В частотно-регулируемом приводе (VFD) и двигателе возможны несколько резонансных (собственных) частот.
В частотно-регулируемом приводе (VFD) и двигателе возможны несколько резонансных (собственных) частот.
Решения для механического резонанса
Если проблемой является только одна резонансная частота, хорошим решением будет усиление «пружин» системы (рис. 1) для повышения ее резонансной частоты. Этого можно добиться, используя менее податливые компоненты, например, заменив винтовые муфты более жесткими «сильфонными» муфтами или заменив более короткие и толстые валы на более длинные и тонкие. Для повышения жесткости ременных передач используйте более широкие или короткие ремни, ремни со стальным бандажом или параллельные (многократные) ремни. Установка более жестких редукторов и усиление рамы или основания машины также может помочь уменьшить проблемы с механическим резонансом.
ЧРП. Как упоминалось ранее, частотно-регулируемые приводы и двигатели могут иметь несколько резонансных частот. Решение проблем механического резонанса в большинстве таких случаев состоит в том, чтобы запрограммировать частотно-регулируемый привод на «пропуск» вызывающих проблемы резонансных частот, что предотвращает работу двигателя в диапазонах скоростей, связанных с резонансом или вибрацией.
Инерция нагрузки к двигателю. Еще один способ решить проблемы механического резонанса — уменьшить отношение инерции нагрузки к двигателю. Например, если двигатель физически намного меньше, чем приводимый им насос, им будет труднее управлять, чем более крупным двигателем, и он будет более восприимчив к механическому резонансу. Использование двигателя большего физического размера улучшит отношение нагрузки к моменту инерции двигателя и, следовательно, уменьшит проблемы с резонансом. Конечно, такое решение может оказаться непрактичным, поскольку может потребовать серьезной модификации электрических и механических систем.
Модификация основания двигателя. Модификация основания двигателя — еще один способ уменьшить резонанс механической системы. Производитель двигателя обычно может предоставить информацию, необходимую для расчета резонансной частоты системы установленного двигателя: вес двигателя, центр тяжести и статическое отклонение. Основания в типичных установках не очень жесткие, поэтому фактическая резонансная частота системы, вероятно, будет ниже, чем показывают расчеты. Если эта частота равна или близка к рабочей скорости, может потребоваться изменить резонансную (тростниковую критическую) частоту двигателя, чтобы предотвратить значительное увеличение амплитуды вибрации.
Если эта частота равна или близка к рабочей скорости, может потребоваться изменить резонансную (тростниковую критическую) частоту двигателя, чтобы предотвратить значительное увеличение амплитуды вибрации.
Обычные способы добиться этого включают изменение жесткости основания, изменение веса комбинации двигатель/основание или изменение (обычно понижение) центра тяжести (см. рис. 2). (Note: In motors with sleeve bearings, a reed critical speed of about 40 to 50 percent of running speed can cause vibration due to oil whip or oil whirl.)
Резонанс электрической системы
Помимо возбуждения механического резонанса, также возможен резонанс электрической системы, часто связанный с присутствием гармоник.
Энергия, поставляемая электроэнергетической компанией, обычно представляет собой чистую синусоидальную волну с основной частотой, обычно 50 или 60 Гц. Однако подключение нелинейных нагрузок к энергосистеме может привести к появлению нежелательных частотных составляющих, называемых гармониками, на частотах, кратных основной частоте. Например, типичный частотно-регулируемый привод создает эти нежелательные компоненты на пятой гармонике (в пять раз больше основной частоты), а также на седьмой, 11-й, 13-й и т. д. Примеры нелинейных нагрузок включают персональные компьютеры, источники бесперебойного питания (ИБП). ) и приводы постоянного тока.
Однако подключение нелинейных нагрузок к энергосистеме может привести к появлению нежелательных частотных составляющих, называемых гармониками, на частотах, кратных основной частоте. Например, типичный частотно-регулируемый привод создает эти нежелательные компоненты на пятой гармонике (в пять раз больше основной частоты), а также на седьмой, 11-й, 13-й и т. д. Примеры нелинейных нагрузок включают персональные компьютеры, источники бесперебойного питания (ИБП). ) и приводы постоянного тока.
Добавление гармоник к основной частоте дает искаженную несинусоидальную форму волны. В зависимости от уровня гармонических искажений вредные последствия могут варьироваться от ложных срабатываний и незначительных неисправностей до повреждения двигателей и насосов и длительного простоя. Гармоники также увеличивают потери в энергосистеме и электрооборудовании.
Для двигателей высокочастотные гармонические составляющие создают дополнительную электрическую нагрузку на обмотки, увеличивают нагрев ротора и сокращают срок службы двигателя. Потенциально наиболее пагубным эффектом гармоник является то, что они могут вызвать системный резонанс, который повреждает двигатели и насосы или даже вызывает отказ системы. Гармоники также могут вызывать ошибочные показания счетчиков, выход из строя подшипников двигателя (из-за электрических токов), перегорание предохранителей в системах с коррекцией коэффициента мощности и помехи телефонной связи. Многие из этих проблем могут остаться незамеченными до тех пор, пока затронутое оборудование не выйдет из строя.
Потенциально наиболее пагубным эффектом гармоник является то, что они могут вызвать системный резонанс, который повреждает двигатели и насосы или даже вызывает отказ системы. Гармоники также могут вызывать ошибочные показания счетчиков, выход из строя подшипников двигателя (из-за электрических токов), перегорание предохранителей в системах с коррекцией коэффициента мощности и помехи телефонной связи. Многие из этих проблем могут остаться незамеченными до тех пор, пока затронутое оборудование не выйдет из строя.
Когда частотно-регулируемый привод или другое нелинейное устройство подает гармонический ток на резонансной частоте, система становится возбужденной или нестабильной. Вариант закона Ома (V = IZ) применяется для системного резонанса. Когда I (амперы) и Z (импеданс) одновременно высоки, V (напряжение) становится исключительно высоким. Это вызывает чрезмерный нагрев или, возможно, немедленный пробой диэлектрика в конденсаторах, трансформаторах или других устройствах.
Другая проблема заключается в том, что большинство производителей частотно-регулируемых приводов указывают максимальную длину кабеля между своим оборудованием и двигателем. Эта спецификация зависит от производителя и привода, но обычно составляет от 50 до 250 футов (от 15 до 75 м). Поскольку это ограничение может сделать применение сложным, непрактичным или даже невозможным, многие пользователи частотно-регулируемых приводов игнорируют его, что приводит к большему количеству отказов двигателей и простоев.
Эта спецификация зависит от производителя и привода, но обычно составляет от 50 до 250 футов (от 15 до 75 м). Поскольку это ограничение может сделать применение сложным, непрактичным или даже невозможным, многие пользователи частотно-регулируемых приводов игнорируют его, что приводит к большему количеству отказов двигателей и простоев.
Если резонансная частота подводящих проводников попадает в диапазон частот формы волны напряжения ЧРП, сами проводники войдут в резонанс. Это усилит составляющие напряжения на (или близкой) к собственной резонансной частоте проводников, вызывая скачки напряжения, которые могут в 2,5 раза превышать напряжение на шине постоянного тока инверторной секции частотно-регулируемого привода.
Решения для устранения резонанса и гармоник электрических систем
Очевидным решением для предотвращения скачков напряжения в системах ЧРП является поддержание длины кабеля между двигателем и приводом в пределах, указанных производителем привода. Как упоминалось ранее, ЧРП также можно запрограммировать на «пропуск» проблемных частот.
Как упоминалось ранее, ЧРП также можно запрограммировать на «пропуск» проблемных частот.
Общедоступные решения для снижения гармоник включают в себя сетевые дроссели, разделительные трансформаторы, фильтры и высокоимпульсные частотно-регулируемые приводы (например, 12- или 18-импульсные). Внимательно рассмотрите все сильные и слабые стороны, чтобы определить, какой из них лучше всего подходит для конкретной установки.
Самый простой и наиболее распространенный способ уменьшить гармоники — добавить сопротивление в систему. Это решение обеспечивает максимальное снижение общих гармонических искажений по отношению к стоимости. Фактически, увеличение импеданса всего на 3 процента уменьшит гармоники тока примерно на 50 процентов в стандартном 6-импульсном частотно-регулируемом приводе. Это решение часто реализуется на частотно-регулируемом приводе путем установки дросселя постоянного тока или реактора входной линии, изолирующего трансформатора или их комбинации.
Сетевые реакторы. Сетевые реакторы обеспечивают импеданс для снижения гармонического тока, но они меньше по размеру и обычно стоят меньше, чем изолирующие трансформаторы. Также называемые катушками индуктивности, они доступны в стандартных диапазонах импеданса 1,5, 3, 5 и 7,5 процентов от импеданса нагрузки.
Сетевые реакторы обеспечивают импеданс для снижения гармонического тока, но они меньше по размеру и обычно стоят меньше, чем изолирующие трансформаторы. Также называемые катушками индуктивности, они доступны в стандартных диапазонах импеданса 1,5, 3, 5 и 7,5 процентов от импеданса нагрузки.
Применение сетевого дросселя на клеммах привода может помочь снизить резонансную частоту всей цепи, но дополнительные потери в меди и сердечнике катушки индуктивности увеличивают общее демпфирование цепи. Хотя это снижает пик перегрузки по напряжению (всплески напряжения), но также увеличивает его продолжительность, что по-прежнему приводит к дополнительной нагрузке на обмотки двигателя.
Изолирующие трансформаторы. Разделительный трансформатор имеет несколько преимуществ. Прежде всего, он обеспечивает импеданс привода, что снижает искажения тока. При правильном выборе его можно использовать для согласования напряжения питания с номинальным напряжением нагрузки. Если вторичная обмотка заземлена, это также изолирует замыкания на землю и снижает синфазный шум (электрический шум, возникающий одновременно на всех проводниках электрической цепи).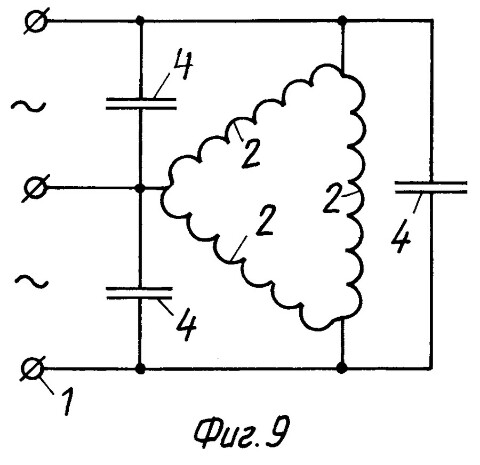
Фильтры гармоник. Также могут быть установлены фильтры гармоник, иногда в сочетании с реакторами и резисторами, для уменьшения содержания гармоник в энергосистеме. В своей простейшей форме комбинация конденсатор-индуктор «улавливает» или отфильтровывает гармонический ток одной частоты. Доступны фильтры нижних частот с конденсаторами, катушками индуктивности и резисторами, которые пропускают через себя только низкие частоты.
Применение настроенного фильтра нижних частот на клеммах инвертора может устранить все напряжения несущей частоты ЧРП. Эти настраиваемые фильтры для конкретных приложений изначально были разработаны для ограничения слышимого шума двигателя. Хотя этот подход удаляет все частоты частотно-регулируемого привода выше основной и обеспечивает превосходную защиту двигателя, фильтры также снижают основное напряжение из-за потерь в катушке индуктивности. Это может привести к тому, что двигатель будет потреблять более высокий основной ток для обеспечения номинальной мощности.