
РЕЛЕЙНЫЙ РЕГУЛЯТОР — это… Что такое РЕЛЕЙНЫЙ РЕГУЛЯТОР?
- РЕЛЕЙНЫЙ РЕГУЛЯТОР
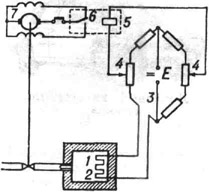
регулятор, изменяющий скачком управляющее воздействие на систему при прохождении регулируемой величины через пороговые (фиксированные) значения (см. рис.). Скачкообразное изменение управляющего воздействия осуществляется релейным элементом, к-рый может иметь неск. устойчивых состояний (напр., два: «включено — выключено»). Р. р. позволяют простыми средствами коммутировать большие мощности.

Релейный регулятор: 1 — газовая печь; 2 — термометр сопротивления; 3 — измерительный мост; 4 — реостаты; 5 — поляризованное реле; 6 — контакты реле; 7 — исполнительный электродвигатель; Е — источник постоянного тока
Большой энциклопедический политехнический словарь. 2004.
- РЕЛЕЙНАЯ ХАРАКТЕРИСТИКА
- РЕЛЕЙНЫЙ ЭЛЕМЕНТ
Смотреть что такое «РЕЛЕЙНЫЙ РЕГУЛЯТОР» в других словарях:
релейный регулятор — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN relay regulatoron off regulator … Справочник технического переводчика
релейный регулятор — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Ein-Aus-Regler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Relaisregler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Zweipunktregler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
on-off-controller — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
relay regulator — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
relinis reguliatorius — statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
régulateur par tout ou rien
ТСН 2001.5-1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства — Терминология ТСН 2001.5 1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства: Агрегат Совокупность нескольких механизмов (не менее двух, работающих в комплексе и обеспечивающих … Словарь-справочник терминов нормативно-технической документации
Релейные регуляторы.
Двухпозиционные регуляторы – Рп2 – это такие приборы, выходная величина которых может принимать только два значения. Зависимость «y» от «x» — разность между текущим и заданным значениями (x0) регулируемой величины.
b – регулирующее воздействие регулятора;
2а – зона неоднозначности.
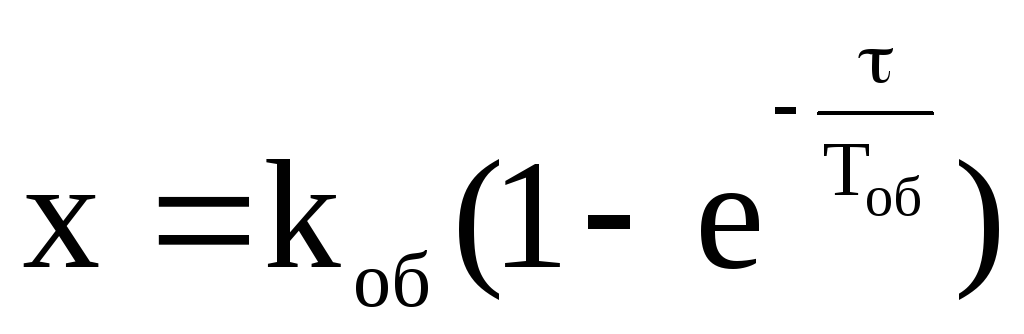
В установившемся режиме при поступлении на вход одно-емкостного объекта с само вырабатыванием ступенчатого воздействия «b» регулируемая величина «x» будет изменяться по экспоненциальному закону:
 —
коэффициент усиления объекта;
—
коэффициент усиления объекта;
 —
постоянная времени объекта.
—
постоянная времени объекта.
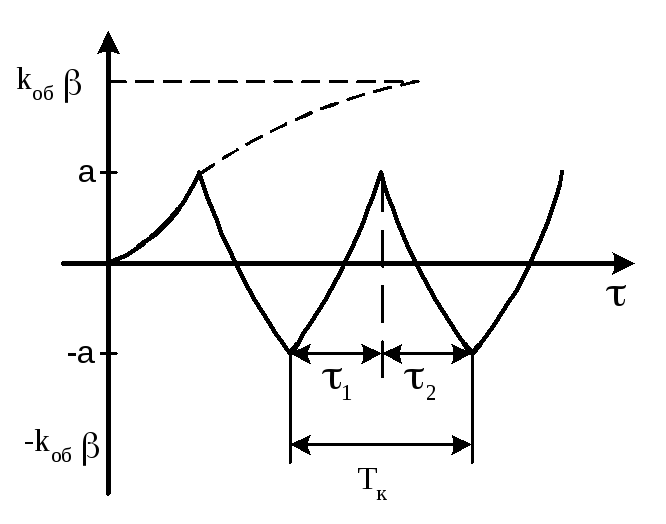
Регулируемая
величина в процессе регулирования
колеблется относительно задающего
воздействия с максимальной амплитудой
отклонения «А». Если значение регулируемой
величины меньше заданного с учётом зоны
неоднозначности, то регулирующее
воздействие «y
= b»,
что обеспечивает полное поступление
энергии в объект, регулируемая величина
начнёт увеличиваться. После того, как
регулируемая величина «x»
превысит «x
В
результате устанавливаются колебания
около заданного значения «x
Диапазон колебаний или динамическая ошибка определяется:
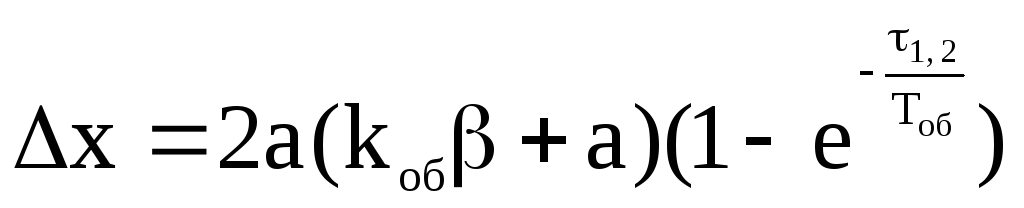
Из
этого выражения находится длительность
импульса —  .
.
Тк – период установившихся колебаний.
n
– частота переключений;  .
.
Уменьшение зоны нечувствительности приводит к уменьшению периода колебаний и увеличению числа переключений, амплитуда уменьшается.
Трехпозиционные регуляторы
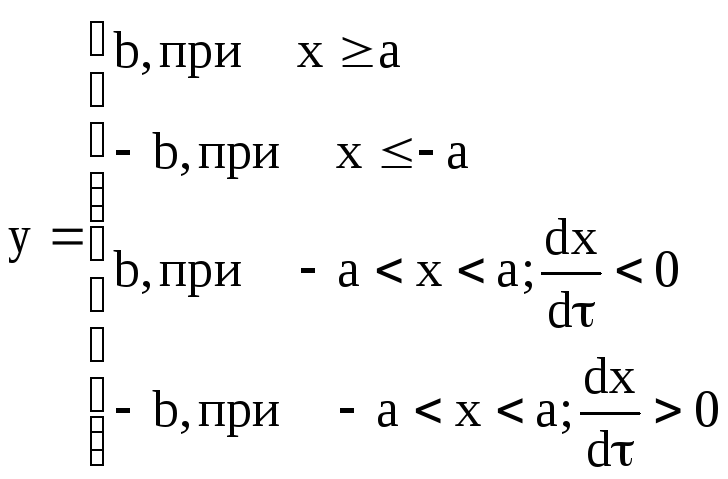
Трехпозиционными регуляторами называют такие приборы, выходная величина которых может принимать три установившихся значения. Они отличаются от двухпозиционных формами статических характеристик релейных устройств и способами подвода энергии в объект регулирования. Кроме режимов максимального подвода энергии при у=В и отсутствия подвода энергии при у=-В, эти регуляторы позволяют устанавливать промежуточную мощность при у = 0. Статическая характеристика трехпозиционного регулятора, имеющего зону нечувствительности 2 (рис. ) определяется выражением




В, при x
y=
0, при -<x<
-B, при x -
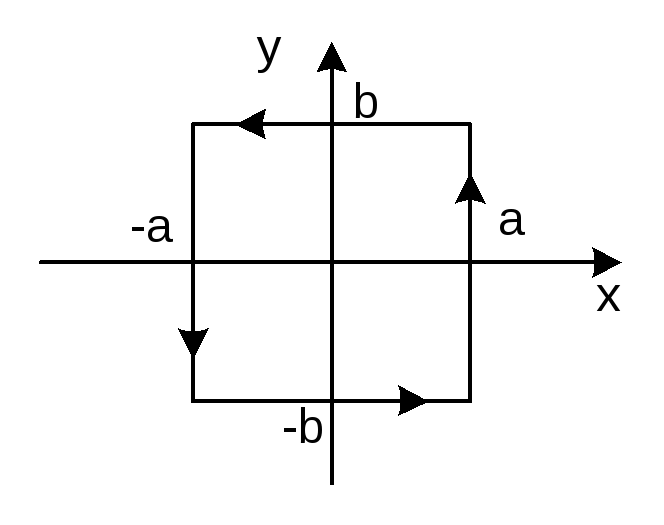
Для регуляторов с релейными устройствами, имеющими, кроме зоны нечувствительности, еще и зоны неоднозначности (рис. )

0, при —<x<
—B, при х< — a—
y= B, при <x<+a, dx/dt<0
0, при +a>x>, dx/dt>0
0, при ——a<x<-, dx/dt<0
-B, при —-a<x<-, dx/dt>0
Характер регулирования аналогичен процессам в системах с двухпозиционными регуляторами, но с меньшими значениями амплитуды отклонений. Кроме того, при выборе промежуточной мощности, достаточно близкой к номинально потребляемой, возможно осуществлять регулирование не только с меньшими амплитудами, но и удерживать величину Х в пределах зоны нечувствительности более длительное время, не образую периодических колебаний.
TRIK Studio: релейный регулятор
27.09.2018
В самом простом случае для коррекции траектории движения модели вдоль линии используется релейный регулятор. Проще всего запрограммировать двухпозиционный релейный регулятор, но использование многопозиционного варианта даст ощутимые преимущества..
Релейный регулятор изменяет управляемое воздействие на систему скачком при прохождении регулируемой величины через пороговые значения. Релейный регулятор нашёл применение, например, в электрическом утюге. В терморегуляторе утюга используется биметаллическая пластина, которая обладает свойством изгибаться в одном направлении под действием повышенной температуры. В условиях нормальной температуры пластина находится в недеформированном ровном состоянии, при котором электрические контакты замкнуты. В процессе нагревания пластина начинает изгибаться, а при достижении температуры порогового значения величина изгиба становится такой, что приводит к размыканию электрической цепи. Через некоторое время биметаллическая пластина остывает и электрическая цепь вновь замыкается, что приводит к нагреву. Благодаря этому температура утюга поддерживается на определённом уровне, заданном при помощи поворотного колёсика.
Преимуществом релейного регулятора является простота его реализации, недостаток — управляющее воздействие не учитывает величину отклонения измеряемого значения от порогового.
В нашем случае при движении тележки по линии датчик света измеряет интенсивность отраженного от поверхности света. Диапазон значений датчика света от 0 (чёрное) до 100 (белое). Если нарисовать чёрную линию на белом фоне, то кажется, что края линии имеют черный цвет, но для датчика света она представляет собой градиент из оттенков серого цвета, интенсивность отражения которых лежит между 0 и 100. При использовании двухпозиционного релейного регулятора в качестве границы серого выбирают среднее значение диапазона после калибровки. Если текущее значение датчика света больше значения границы серого, то нужно тележку повернуть в одну сторону (в сторону линии), если меньше — в другую (в сторону от линии). Благодаря этому движение тележки вдоль линии будет представлять собой чередование поворотов.
Траектория движения датчика света лежит вдоль одной из границ линии — нижней или верхней. Вся линия не используется по причине сложности определения положения датчика относительно центра линии. При определённых условиях можно для движения использовать всю ширину линии, но это приведёт к весьма сложной программе и потере простоты реализации, что является основным преимуществом релейных регуляторов.
Ниже показана базовая программа двухпозиционного релейного регулятора.
В переменной grey задаётся значение яркости границы, которое затем в цикле сравнивается с текущим значением датчика света, подключенного к порту A1 на панели настройки сенсоров. При помощи переменной side задаётся сторона линии, вдоль которой будет происходить перемещение датчика.
Создайте на поле имитации линию максимально возможной толщины и установите тележку так, чтобы датчик располагался над линией. После запуска программы датчик будет ориентироваться по верхней границе линии. После изменения значение переменной side = 1 датчик света будет перемещаться вдоль верхней границы линии. Значение переменно side удобно привязать к кнопкам контроллера. Тогда не придётся изменять программу для выбора стороны движения согласно условиям соревнования.
Величина задержки таймера определяет скорость опроса датчика света. Слишком большая задержка может привести к потере линии. Тележка на белом поле всегда поворачивается в одну сторону, и этот поворот будет происходить в сторону линии только при положении датчика с определённой стороны линии.
Изменение величины скорости v2 влияет как на плавность поворотов, так и на надёжность движения тележки по линии. Чем больше значение этой скорости, тем более резкие повороты будет совершать тележка. Для увеличения скорости тележки значение v2 нужно уменьшить, но на резких поворотах трассы может произойти потеря линии.
Диаграммы имеют свойство быстро усложняться и вскоре в мешанине стрелок и пиктограмм будет непросто разобраться. Ниже показан пример подпрограммы с переменными для блока моторов.
Изначально датчик света стоит на тележке по центру. При движении вдоль нижней границы линии сдвиньте датчик вниз до линии прямолинейного движения правого колеса. Тележка станет двигаться ровнее, но пройдёт большее расстояние. Сдвиньте датчик на линию движения левого колеса для сравнения результатов.
Для увеличения скорости на прямолинейных участках в программу нужно ввести ещё одно граничное условие, которое позволит использовать прямолинейное движение тележки. Для определения границ полосы, в пределах которой будет осуществляться это движение, произведём нормализацию значений освещенности. Датчик света выдаёт значения от 0 до 100 единиц, но на практике диапазон освещённости меньше, особенно в случае использования цветной линии. Для надёжного обнаружения поля и линии следует расширить полученный диапазон до диапазона от 0 до 100 по формуле:
x2 = (x1 - нижняя граница1)*100/(верхняя граница1 - нижняя граница1)
Предположим, при калибровке для нижней границы диапазона было получено значение 20, а для верхней — 70, тогда значение x1 = 30 в диапазоне от 0 до 100 будет равно 20 = (30-20)*100/(70-20). Выберем для прямолинейного движения интервал значений яркости от 50 до 80. Алгоритм движения тележки в этом случае будет таким:
Если sensor > 80
повернуть к линии
Иначе если sensor > 50
двигаться прямо
Иначе
повернуть от линииЭто алгоритм трёхпозиционного релейного регулятора. В целях упрощения программы в ней не используется смена стороны лини, калибровка и нормализация. Если вам потребуется нормализация, то вместо переменной sensorA1 нужно задать формулу (sensorA1 — min)*100/(max-min). Значения переменных min и max можно получить в процессе калибровки так: сначала установите датчик света тележки на центр линии и при нажатии на кнопку запишите значение в переменную min, затем установите датчик света над белым фоном и при нажатии на другую кнопку запишите значение в переменную max.
Чем шире диапазон освещённости для прямолинейного движения, тем большее количество времени тележка будет двигаться прямолинейно, но вместе с этим увеличивается вероятность потери линии на крутых участках.
Скорость второго мотора при прямолинейном движении указана v-10 для моделирования ситуации увода устройства с линии.
Значения всех параметров, влияющих на движение устройства по линии, на практике подбираются опытным путём. Для получения лучших результатов они подбираются под конкретную трассу соревнований в ходе предварительных заездов, как это происходит на чемпионатах «Формулы-1». Для более точной настройки параметров в режиме отладки можно посмотреть график изменения контролируемой величины — значения датчика света, энкодеров и др.
Определить время прохождения трассы в ручную достаточно сложно. Но при помощи перекрёстка можно этот процесс автоматизировать, если старт производить от стартовой линии, а таймер выключать при пересечении модели финишного перекрёстка.
Для обнаружения перекрёстков обычно используют два и больше датчиков света, но четырёхсторонние пересечения можно обнаружить и с использование одного датчика. Алгоритм простой: если датчик обнаружит область темнее заданной границы чёрного, то это перекрёсток.
Для предотвращения повторных срабатываний используется защёлка flag. Подсчёт и вывод количества перекрёстков на дисплей контроллера происходит только при flag=false. Использование защёлки является альтернативой временному контролю, для которого может потребоваться создание дополнительного потока.
При прохождении перекрёстка датчик света заезжает на него. Попробуйте это объяснить.
Можно ли при помощи одного датчика реализовать проезд штрих-кода и инверсии? Теоретически это возможно при определённых условиях, но сложность программы ставит под вопрос практической целесообразности. Холодильник можно переместить на одноколёсной тачке, но это потребует использования дополнительные приспособлений и рациональнее сразу использовать четырёхколёсную тележку.
Потеря линии является весьма актуальным вопросом при использовании одного датчика света и этому вопросу стоит уделить отдельное внимание.
5.2. Структурные схемы релейно-импульсных регуляторов
В промышленности большое распространение получили регулирующие устройства с импульсным выходным сигналом и исполнительным механизмом постоянной скорости, снабжённым асинхронным или синхронным двигателем двигателем переменного тока. Такие РУ формируют управляющее воздействие в виде последовательности электрических импульсов постоянной амплитуды, временные характеристики которых зависят от рассогласования между фактическим и заданным значениями регулируемой величины, параметров реализуемого закона регулирования и ряда других факторов.
Во время работы РУ происходит усиление его выходных импульсов до уровня, необходимого для управления ИМ интегрирующего типа. Это осуществляется с помощью пускового устройства, контактного или бесконтактного, которое является усилителем мощности. В общем виде ИМ можно рассматривать как нелинейное звено, входным сигналом которого является длительность управляющих импульсов, а выходным – перемещение вала ИМ.
Выходной сигнал РУ, управляющий ИМ, характеризуется двумя переменными величинами – длительностью импульсов tи и длительностью пауз между ними tп.
Приподаче на вход ИМ через пусковое устройство импульса длительностью tи выходной вал ИМ переместится в относительных единицах на величину μ = tи / TИМ .При воздействии на вход ИМ последовательности импульсов перемещение его выходного органа будет осуществляться в первом приближении по следующему закону:
где μ0 – начальное положение ИМ в относительных единицах.
Это уравнение является уравнением движения ИМ в так называемом скользящем ( пульсирующем ) режиме.
Скользящий режим является основным режимом работы РУ с импульсным выходным сигналом. Именно в этом режиме уравнение регулятора наиболее близко к линейному. При скользящем режиме скорость нарастания сигнала рассогласования на входе РУ всегда должна быть меньше скорости его компенсации сигналом функциональной обратной связи. При этом максимально возможный сигнал обратной связи также должен быть больше входного сигнала.
В пульсирующем режиме перемещение ИМ имеет прерывистый характер. При каждом включении пускового устройства ИМ перемещается на величину
μ = vэквtи ,
где vзкв –эквивалентная скорость перемещения при данной продол- жительности импульса tи .
Во время паузы положение ИМ неизменно.
Большинство промышленных объектов из-за их значительной инерционности обладают достаточно хорошими фильтрующими свойствами, поэтому прерывистое перемещение ИМ в пульсирующем режиме работы РУ воспринимается ими как плавное, происходящее с некоторой усреднённой скоростью vср, которую можно найти по формуле
где γ – коэффициент заполнения выходных импульсов РУ.
Коэффициент заполнения импульсов γ играет роль самостоятельного параметра, так как он практически полностью характеризует последовательность выходных импульсов РУ. Поэтому уравнение движения ИМ в скользящем режиме можно представить также в абсолютных единицах в виде
Совокупность технических средств, состоящая из РУ с импульсным выходным сигналом и ИМ интегрирующего типа с соответствующим пусковым устройством образует электрический регулятор, который в пульсирующем режиме позволяет формировать в первом приближении законы П-, ПИ- либо ПИД-регулирования.
РУ с импульсным выходным сигналом выполняет функции релейного усиления в прямом канале, содержащем релейный элемент, и формирование динамических свойств регулятора с помощью контура функциональной обратной связи. Поэтому РУ характеризуется зонами нечувствительности н и возврата в, а также параметрами функциональной обратной связи.
Будем считать, что пусковое устройство и ИМ выполняют вместе функции усиления и интегрирования выходного сигнала РУ. В результате динамические свойства исполнительной части электрического регулятора можно в линеаризованном виде характеризовать следующей передаточной функцией:
WИМ(р) = 1 / ТИМ р.
П оэтому структурную схему РУ вместе с исполнительной частью можно представить в виде, изображённом на рис. 5.5.
Обобщённая структурная схема РУ содержит трёхпозиционный релейный элемент, охваченный частотнозависимой отрицательной обратной связью с передаточной функцией Wо.с(р) , и входное звено с передаточной функцией Wвх(р).
Трёхпозиционный релейный элемент характеризуется коммутируемым выходным напряжением zн, зоной нечувствительности н, зоной возврата в и порогом отпускания отп = н / 2 – в .
Релейный элемент вступает в работу только при таких уровнях входного сигнала σ, при которых имеет место неравенство
> н / 2 .
Релейный элемент выключается тогда, когда сигнал достигнет значения
– = н / 2 в = отп .
В регулирующих устройствах с импульсным выходным сигналом дополнительными параметрами настройки должны быть выбраны зона нечувствительности и зона возврата трёхпозиционного релейного элемента. Как будет показано ниже, от величины зоны возврата существенным образом зависит минимальная длительность включения ИМ. При работе РУ в пульсирующем режиме сигнал σ перед релейным элементом пульсирует в пределах зоны возврата. Выбор слишком малой продолжительности включения ИМ приводит к его повышенному износу.
В РУ с релейно-импульсным выходным сигналом, реализующем закон ПИ-регулирования, входное устройство представляет собой измеритель рассогласования ε, а обратная связь реализована в виде апериодического звена с передаточной функцией
обычно это RC-цепь с переключаемыми постоянными времени при заряде Тз и разряде Тр .
Рассмотрим работу регулятора в разомкнутой АСР. При поступлении на вход регулятора постоянного сигнала рассогласования ε0 н / 2 релейный элемент срабатывает и включает ИМ, который начинает вращаться с постоянной скоростью, перемещая регулирующий орган в сторону уменьшения рассогласования. Одновременно сигнал z или его часть zн подаётся на устройство обратной связи. Так как устройство обратной связи является апериодическим звеном, при поступлении на его вход постоянного напряжения Uвх = zн на его выходе появится выходное напряжение ζ возрастающее по экспоненте 1 (рис. 5.6). Это напряжение ζ направлено встречно напряжению входного сигнал ε, вследствие чего результирующее напряжение σ = ε – ζ , поступающее на вход релейного элемента, начнёт уменьшаться.
При уменьшении σ до значения σ = ε – ζ = отп релейный элемент выключится (момент времени t1), сигнал zн на входе пускового устройства ИМ станет равен нулю, ИМ остановится. Напряжение на входе канала обратной связи также станет равным нулю. С этого момента напряжение на выходе канала обратной связи ζ станет уменьшаться по экспоненте 2, напряжение σ станет возрастать и при σ н / 2 (момент времени t2) релейный элемент вновь сработает, ИМ включится, а на вход канала обратной связи поступит сигнал zн. Напряжение ζ на выходе канала обратной связи вновь станет возрастать по экспоненте, повторяющей ход экспоненты 1. Далее процессы включения и выключения (автоколебательный режим) будут повторяться. График перемещения выходного элемента ИМ (t) имеет вид ломаной линии 3, которая может быть приближённо заменена прямой 4.
Сравнивая линеаризованный закон изменения (t) (прямая 4) с идеальным законом ПИ-регулирования, можно утверждать, что релейно-импульсный ПИ-регу-лятор с ИМ постоянной скорости со структурой, показанной на рис. 5.5, приближённо реализует закон ПИ-регулирования. Пропорциональная составляющая закона ПИ-регулирования приближённо реализуется при изменении ε за счёт начального быстрого перемещения в течение времени tв (время первого включения), а интегральная – за счёт последующего автоколебательного режима работы релейного элемента, охваченного отрицательной обратной связью.
Для обеспечения независимой настройки продолжительности импульсов tи и пауз tп с помощью специального автоматического переключателя в цепи обратной связи переключаются постоянные времени при заряде Тз и разряде Тр .
Определим параметры приближённого закона ПИ-регули-рования данного регулятора.
Обозначим через ζЗ величину сигнала обратной связи на участке заряда (экспонента 1), а через ζр – на участке разряда (экспонента 2). Для продолжительности импульса можно получить
В этом уравнении ζз неизвестно. Поэтому оценим, каким может быть ζз на участке автоколебательного режима работы регулятора. С точки зрения уменьшения ошибки регулирования регулятор будет работать тем лучше, чем меньше н и, соответственно, σ, наилучшее значение которой σ 0. Отсюда получаем
ε – ζз= σ 0, т.е. ζз ε .
Подставив полученное значение ζз, найдём
где Vсв = kzн / Тз – параметр настройки регулятора, называемый «скоростью связи», характеризующий наклон экспоненты 1 в точке t = 0.
Длительность пауз определяется выражением
Теперь можно найти коэффициент заполнения γ:
где
Так как средняя скорость перемещения выходного органа ИМ vср = γ vэкв, с учётом найденного выражения для γ можно записать :
откуда
Если постоянные времени заряда и разряда одинаковы, то В = 0, и последнее выражение можно записать так:
где kp = vэкв / Vсв = vэквТз / ( kzн ) ,
Тиз = Тр = Тз .
Таким образом, релейно-импульсный регулятор со структурной схемой по рис. 5.5 действительно приближённо реализует закон ПИ-регулирования с параметрами настройки kр и Тиз .
Найдём время первого включения регулятора tв. Если kzнε0, кривая 1 за время tв незначительно отклонится от прямой, и ζ скомпенсирует входной сигнал ε = ε0 за время tв, равное
tв = ( ε0 – отп ) /Vсв.
Если ε0 н / 2 , приближённо можно записать
tв ε0 / Vсв,
что на действующем регуляторе позволяет экспериментально найти коэффициент передачи регулятора kp по формуле:
kp = vэквtв / ε0 .
48
Математические модели релейно-импульсных регуляторов / Habr
Введение
Важнейшей задачей автоматического управления любыми технологическими процессами является разработка математического описания, расчет и анализ динамики автоматических систем регулирования (АСР).
Практика промышленного использования микропроцессорных регулирующих приборов (МРП) показала, что “идеальные алгоритмы” физически не реализуемы. Синтезированная на их основе АСР не отражает поведение реальной системы [1].
Отклонения алгоритмов от идеализированных при определенных условиях, например, для релейно-импульсных регуляторов, когда скорость исполнительного механизма соответствует реальной динамике объекта, поведение реальной системы с достаточной степенью точности соответствует результатам математической модели.
Релейно-импульсные регуляторы применяются в микропроцессорных регулирующих приборах, где наблюдается следующая тенденция. Например, в публикации [2] описаны возможности применения протокола modbus для создания собственной Scada системы на базе Python.
В публикации [3] описано использование Python для работы с Arduino. Продолжаю эту тенденцию и я в надежде, что Python окончательно овладеет этой новой областью применения.
1.Типовые линейные алгоритмы регулирования
Привожу идеальные алгоритмы регулирования, которые определяются уравнениями:
П- алгоритм:
ПИ- алгоритм:
ПИД- алгоритм:
где – регулирующее воздействие; – сигнал рассогласования; Kp,Ki,Kd — коэффициент передачи и Ti,Td постоянные времени соответствующих звеньев (параметры настройки регуляторов).
Все переходные характеристики регуляторов с учётом параметров настройки можно представить одной общей формулой, избегая неопределённости от деления на 0:
from numpy import e,arange
def hp(t,Kp,Ki,Kd,Td):
if t<0:
z=0
elif Td==0:
z=Kp+Ki*t
else:
z=Kp+Ki*t+Kp*Kd*e**(-t/Td)
return zСледует заметить, что ПИД-регулятор в идеальном виде физически не реализуем, поэтому представлен в виде: Kp+Ki*t+Kp*Kd*e**(-t/Td) для имитации идеальности.Переходные характеристики идеальных регуляторов
#!/usr/bin/env python
#coding=utf8
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['font.family'] = 'fantasy'
mpl.rcParams['font.fantasy'] = 'Comic Sans MS, Arial'
from numpy import e,arange
def hp(t,Kp,Ki,Kd,Td):
if t<0:
z=0
elif Td==0:
z=Kp+Ki*t
else:
z=Kp+Ki*t+Kp*Kd*e**(-t/Td)
return z
x=arange(-2,10,0.01)
y=[hp(t,2,0,0,0) for t in x]
y1=[hp(t,2,0.25,0,0) for t in x]
y2=[hp(t,2,0.25,2,2) for t in x]
plt.title('Переходные характеристики регуляторов')
plt.plot(x, y, linewidth=2, label='П регулятор')
plt.plot(x, y1, linewidth=2, label='ПИ регулятор')
plt.plot(x, y2, linewidth=2, label='ПИД регулятор ')
plt.legend(loc='best')
plt.grid(True)
plt.show()Характер переходных процессов показан на графике:
На основе типовых идеальных алгоритмов регулирования в теории управления развиты методы оптимального параметрического синтеза и исследованы общие свойства АСР.
В промышленных автоматических регуляторах типовые алгоритмы реализуется приближенно. Отклонение алгоритма регулирования от идеального не оказывает существенного влияния на поведение системы, если регулятор работает в области “нормальных” режимов.
Для этого необходимо знать и учитывать существенные особенности реального алгоритма, обусловленные способом его технической реализации. В практике автоматизации получили широкое распространение электрические (электронные) регуляторы косвенного действия в форме виртуальных модулей микропроцессорных контроллеров.
Рассмотрим классификацию автоматических электрических регуляторов по способу реализации алгоритма [1]:
В соответствии с представленной классификацией в этой и следующих публикациях будет рассматриваться реализация математических моделей регуляторов средствами Python.
2. Регуляторы релейно-импульсного действия
В автоматических системах управления технологическими процессами используются исполнительные механизмы (ЭИМ) с электрическими асинхронными реверсивными двигателями с постоянной частотой вращения выходного вала. Это и определило способ реализации алгоритма регулирования.
Принцип реализации ПИ-алгоритма при наличии ЭИМ постоянной скорости иллюстрирует схема, представленная на рисунке:
Регулирующий блок (РБ) формирует управляющие ЭИМ прямоугольные импульсы постоянной амплитуды, длительность и скважность которых зависят от значений параметров настройки регулятора и значения входного сигнала.
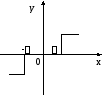
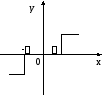
Прямой канал РБ содержит нелинейный элемент – трехпозиционное реле с зоной нечувствительности ∆н зоной возврата ∆в, приведённое на рисунке:
Модель нелинейного элемента#!/usr/bin/env python
#coding=utf8
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['font.family'] = 'fantasy'
mpl.rcParams['font.fantasy'] = 'Comic Sans MS, Arial'
from numpy import arange,sin,cos,sign
def z(t,a,b):
if -a<4*sin(t)<b and 4*cos(t)>0:
z=0
elif -b<4*sin(t)<a and 4*cos(t)<0:
z=0
else:
z=sign(sin(t))
return z
x=arange(0,6,0.005)
y=[4*sin(t) for t in x]
y1=[z(t,2,3) for t in x]
y2=[2 for t in x]
y3=[3 for t in x]
plt.figure()
plt.title('Дискретная модель РЭ: вход -выход')
plt.plot(x, y, linewidth=2, label='Входной сигнал')
plt.plot(x, y1, linewidth=2, label='Выходной сигнал')
plt.plot(x, y2, linewidth=1, label='2 ')
plt.plot(x, y3,linewidth=1, label='3')
plt.legend(loc='best')
plt.grid(True)
plt.figure()
plt.title('Дискретная модель РЭ. Характеристика РЭ')
plt.plot(y, y1, linewidth=2, label=' Характеристика РЭ')
plt.legend(loc='best')
plt.grid(True)
plt.show() Анализируем результат работы модели по двум следующим графикам:
Дискретная модель РЭ основана на разностных уравнениях. Формирующая ПИ-алгоритм обратная связь реализована с использованием апериодического звена с передаточной функцией:
Регулирующий блок (РБ) представляет собой широтно-импульсный модулятор (ШИМ), который может быть построен с использованием как аналоговых, так и цифровых средств.
Регулирующий блок совместно с исполнительным механизмом постоянной скорости обеспечивают при определенных условиях достаточно точную реализацию ПИ-алгоритма:
(1)
И соответственно переходной характеристики:
(2)
Для реализации ПИД-алгоритма ко входу ПИ-регулятора релейно-импульсного действия подключается дифференциатор W(s) по схеме:
Введенная передаточная W(s) образуется одним или двумя последовательно включенными дифференцирующими звеньями. Регулирующий блок совместно с исполнительным механизмом постоянной скорости обеспечивает при определенных условиях достаточно точную реализацию ПИД-алгоритма:
(3)
И соответственно переходной характеристики:
(4)
Листинг для сравнения ПИ- и ПИД-алгоритмов#!/usr/bin/env python
#coding=utf8
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['font.family'] = 'fantasy'
mpl.rcParams['font.fantasy'] = 'Comic Sans MS, Arial'
from numpy import e,arange
def hp(t,Kp,Ti,Kd,Td):
z=Kp+Kp*t/Ti+Kp*Kd*e**(-t/Td)
return z
x=arange(0,10,0.02)
y1=[hp(t,2,2,0,0.5) for t in x]
y2=[hp(t,2,2,4,0.5) for t in x]
plt.title('Реализация ПИД алгоритма')
plt.plot(x, y1, linewidth=1, label='ПИ регулятор')
plt.plot(x, y2, linewidth=2, label='ПИД регулятор ')
plt.legend(loc='best')
plt.grid(True)
plt.show() Анализируем график переходных процессов для выбранных настроек ПИ- и ПИД-алгоритмов.
Линейные модели релейно-импульсных регуляторов не исключают возможности мгновенного изменения регулирующего воздействия (выходной величины регулятора).
У реальных релейно-импульсных регуляторов перемещение выходного вала или штока ЭИМ происходит за некоторое конечное время, зависящее как от установленных значений параметров настройки, так и скорости исполнительного механизма so.
Так, при ступенчатом изменении входного сигнала, длительность импульса на выходе регулирующего блока РБ для П-алгоритма определяется соотношением:
Длительность первого импульса на выходе РБ для ПИ-алгоритма определяется уравнением:
Последующие импульсы постоянной длительности tи повторяются через следующие интервалы времени:
где — коэффициент передачи регулятора; — постоянная интегрирования, с; — скорость исполнительного механизма, .
3. Моделирование динамики релейно-импульсных П-ПИ- и ПИД-регуляторов в неравновесных режимах
Граф релейно-импульсного ПИД-регулятора приведен на следующем рисунке:
Листинг модели динамики релейно-импульсных регуляторов#!/usr/bin/env python
#coding=utf8
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['font.family'] = 'fantasy'
mpl.rcParams['font.fantasy'] = 'Comic Sans MS, Arial'
from numpy import arange,sign
def fd(Kd,Td,dt,x,x1,y):# РД -звено (дифференциатор)
return (1-dt/Td)*y+Kd*(x-x1)
def fa(Ta,Ka,dt,x,y):# апериодическое звено (обратная связь)
return (1-dt/Ta)*y+Ka*x*dt/Ta
def fi(so,dt,x,y):# интегратор (исполнительный механизм)
return y+so*x*dt
""" Подготовка исходных данных"""
te=15;N=300;dt=0.05
x0=[0 for w in arange(0,N+1)];x1=[0 for w in arange(0,N+1)]
x2=[0 for w in arange(0,N+1)];x3=[0 for w in arange(0,N+1)]
z=[0 for w in arange(0,N+1)];z1=[0 for w in arange(0,N+1)]
z2=[0 for w in arange(0,N+1)];m=[0 for w in arange(0,N+1)]
x=[0 for w in arange(0,N+1)]
""" Численное решение"""
def P(so,Ka,Ta,a,b,Kd,Td,Dl,e):
for j in arange(0,N,1):
x0[j+1]=e-Dl*m[j]
x[j+1]=x0[j+1]+x2[j]-x3[j]
if -a<x[j+1]<b and x[j+1]>x[j]:
z1[j+1]=0
else:
z1[j+1]=sign(x[j-1])
if -b<x[j+1]<a and x[j+1]<x[j]:
z2[j+1]=0
else:
z2[j+1]=sign(x[j-1])
if x[j+1]>x[j]:
z[j+1]=z1[j+1]
else:
z[j+1]=z2[j+1]
x1[j+1]=fd(Kd,Td,dt,x0[j+1],x0[j],x1[j])
x2[j+1]=fd(1,Ta,dt,x1[j+1],x1[j],x2[j])
x3[j+1]=fa(Ta,Ka,dt,z[j+1],x3[j])
m[j+1]=fi(so,dt,z[j],m[j])
return m
NN=[j*dt for j in arange(0,N+1,1)]
#P(so,Ka,Ta,a,b,Kd,Td,Dl,e)
#PID=P(1,10,5,0.4,0.5,10,1,0,1)
#PP=P(1,0.1,0.1,0.2,0.6,0,0.2,4,1)
#PI=P(1,10,5,0.4,0.5,0,0.2,0,1)
#PI1=P(0.5,10,5,0.4,0.5,0,0.2,0,1)
plt.figure()
plt.title('Моделирование динамики релейно-импульсных регуляторов')
plt.plot(NN, P(1,10,5,0.4,0.5,0,0.2,0,1), linewidth=2, label='РИ - ПИ')
plt.plot(NN,P(1,10,5,0.4,0.5,10,1,0,1), linewidth=2, label='РИ - ПИД')
plt.legend(loc='best')
plt.grid(True)
plt.figure()
plt.title('Моделирование динамики релейно-импульсных регуляторов')
plt.plot(NN, P(1,10,5,0.4,0.5,0,0.2,0,1), linewidth=2, label='РИ -ПИ. Скорость ЭИМ -1 с-1')
plt.plot(NN,P(0.5,10,5,0.4,0.5,0,0.2,0,1), linewidth=2, label='РИ -ПИ.Скорость ЭИМ -0.5 с-1')
plt.plot(NN,P(1,0.1,0.1,0.2,0.6,0,0.2,4,1), linewidth=2, label='РИ -П.Скорость ЭИМ -1 с-1')
plt.legend(loc='best')
plt.grid(True)
plt.show()Анализируем полученные результаты.
Характеристика регулятора зависит как от скорости исполнительного механизма so, так и параметров релейного элемента а, b. Значение so предопределяется типом ЭИМ и характеризуется параметром Тим — минимальное время полного хода. Для стандартных ЭИМ значения Тим равно 10,25,63, 100 и 160 с.
Значение b (половина зоны нечувствительности) устанавливается по величине допустимого отклонения, на которое регулятор не должен реагировать.
Параметры настройки регулятора Кр, Ти, Кд, Тд находятся в нелинейной зависимости от скорости исполнительного механизма so, параметров обратной связи Ка, Та и релейного элемента а, b.
Выводы
Средствами языка программирования Python, с применением метода конечных разностей, получены математические модели электронных релейно-импульсных регуляторов косвенного действия.
Полученные модели могут быть использованы при проектировании микропроцессорных регулирующих приборов.
Ссылки
- Расчёт и моделирование автоматических систем регулирования в среде Mathcad.
- ScadaPy — использование OPC UA.
- Веб-сервер — ваша первая сетевая программа Arduino.
релейный регулятор — это… Что такое релейный регулятор?
- релейный регулятор
релейный регулятор
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
- relay regulator
- on-off regulator
Справочник технического переводчика. – Интент. 2009-2013.
- релейный регистр
- таймер
Смотреть что такое «релейный регулятор» в других словарях:
РЕЛЕЙНЫЙ РЕГУЛЯТОР — регулятор, изменяющий скачком управляющее воздействие на систему при прохождении регулируемой величины через пороговые (фиксированные) значения (см. рис.). Скачкообразное изменение управляющего воздействия осуществляется релейным элементом, к рый … Большой энциклопедический политехнический словарь
релейный регулятор — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Ein-Aus-Regler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Relaisregler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
Zweipunktregler — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
on-off-controller — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
relay regulator — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
relinis reguliatorius — statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
régulateur par tout ou rien — relinis reguliatorius statusas T sritis automatika atitikmenys: angl. on off controller; relay regulator vok. Ein Aus Regler, m; Relaisregler, m; Zweipunktregler, m rus. релейный регулятор, m pranc. régulateur par tout ou rien, m … Automatikos terminų žodynas
ТСН 2001.5-1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства — Терминология ТСН 2001.5 1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства: Агрегат Совокупность нескольких механизмов (не менее двух, работающих в комплексе и обеспечивающих … Словарь-справочник терминов нормативно-технической документации
Релейный регулятор — Большая Энциклопедия Нефти и Газа, статья, страница 1
Релейный регулятор
Cтраница 1
Релейный регулятор прекращает или, наоборот, полностью восстанавливает приток энергии к объекту регулирования. [1]
Релейные регуляторы будут специально рассмотрены в гл. [3]
Релейные регуляторы применимы к объектам, для которых допустимы автоколебания. [4]
Релейные регуляторы обеспечивают большее быстродействие. [5]
Релейные регуляторы очень просты по конструкции, надежны в работе, не сложны в настройке и обслуживании. [6]
Релейные регуляторы являются наиболее простыми в конструктивном отношении. Характерным для релейного регулирования является скачкообразное изменение положения исполнительного органа. Допустимые параметры автоколебаний ограничивают область применения этих регуляторов. [7]
Релейные регуляторы при одной и той же управляемой мощности обладают меньшими габаритами и большим коэффициентом полезного действия. [8]
Релейный регулятор является основным элементом описываемой системы. Вследствие этого ниже, приводится описание его принципиальной электрической схемы. [10]
Релейные регуляторы с постоянной скоростью исполнительного механизма PC на астатических объектах не применяют, потому что такую систему регулирования нельзя сделать устойчивой. [12]
Релейные регуляторы напряжения не содержат в явном виде всех элементов структурной схемы, показанной на рис. 7 — 5: чувствительный ( измерительный) и исполнительный элементы этих регуляторов совмещены в одной единице, а усилительные элементы в схеме панели автоматического управления отсутствуют. Благодаря этому релейные регуляторы имеют большое потребление мощности. [13]
Релейных регуляторов в мире, вероятно, существует больше, чем всех сервомеханизмов и регуляторов других типов, взятых вместе. Нагреватели воды, холодильники, доменные печи, электрические утюги, устройства для варядкн аккумуляторов, регуляторы уровня жидкости и регуляторы давления сжатого воздуха обычно относятся к такому типу систем. [14]
Релейному регулятору часто присущ колебательный режим работы при отсутствии статической ошибки регулирования, если нет зоны нечувствительности. [15]
Страницы: 1 2 3 4