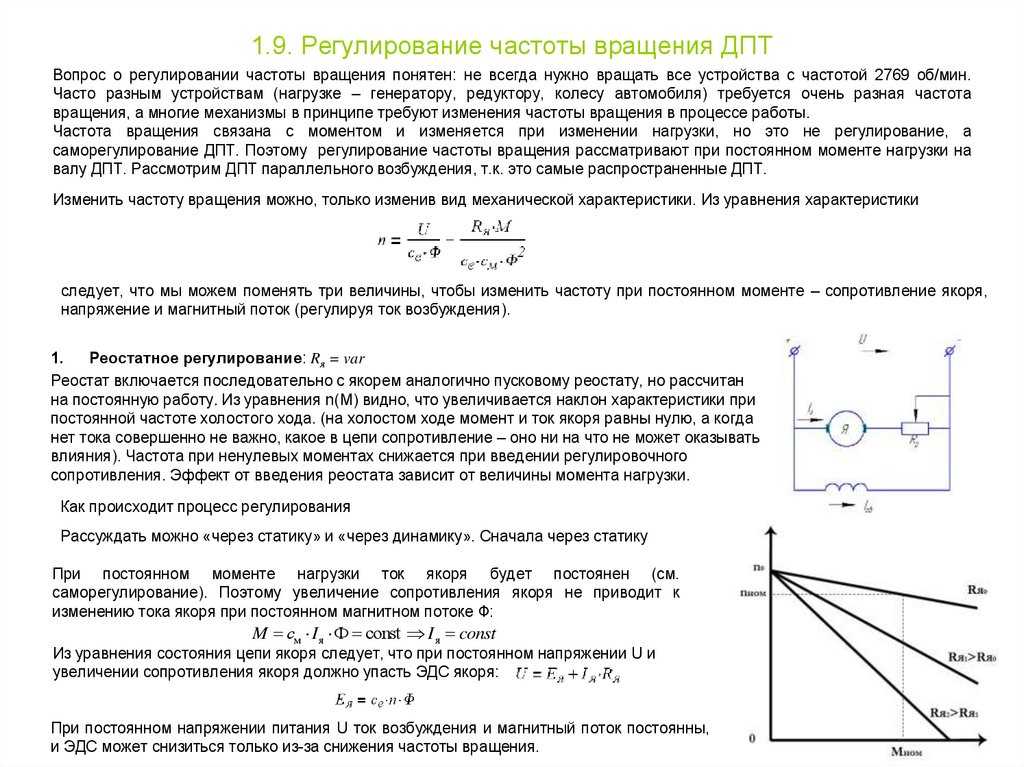
Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку n
2.3), проходящую через одну точку n
Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.
Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения
Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске
Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя. п≤2,5Iя.ном.
п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения.
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ.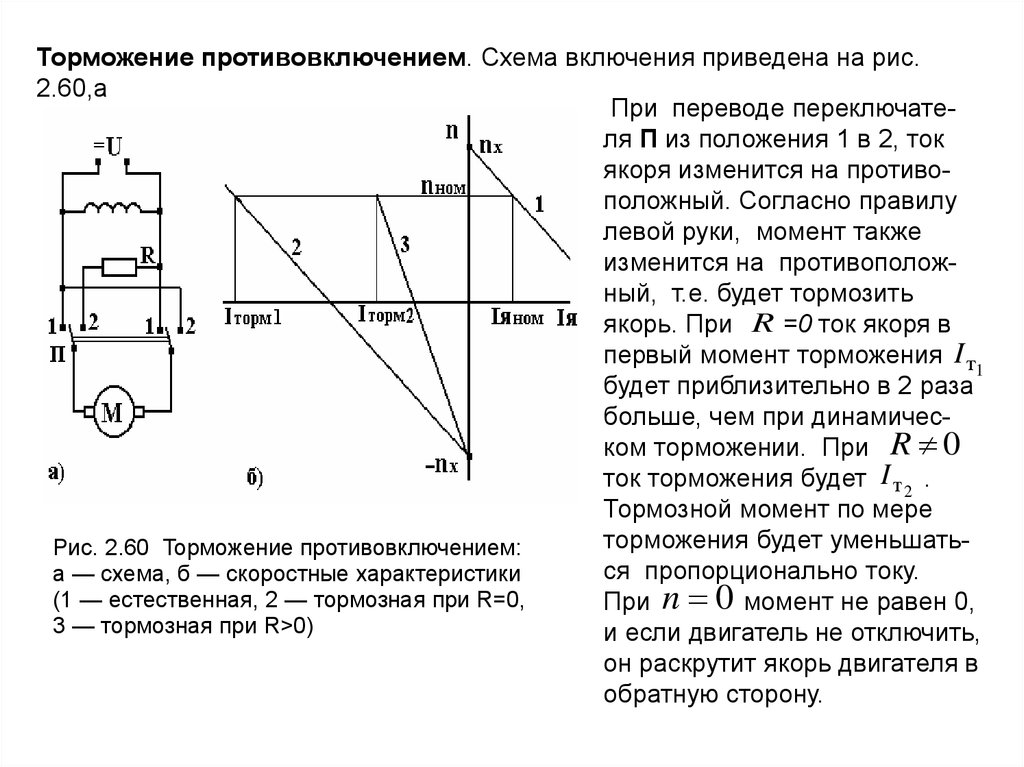 В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики
Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.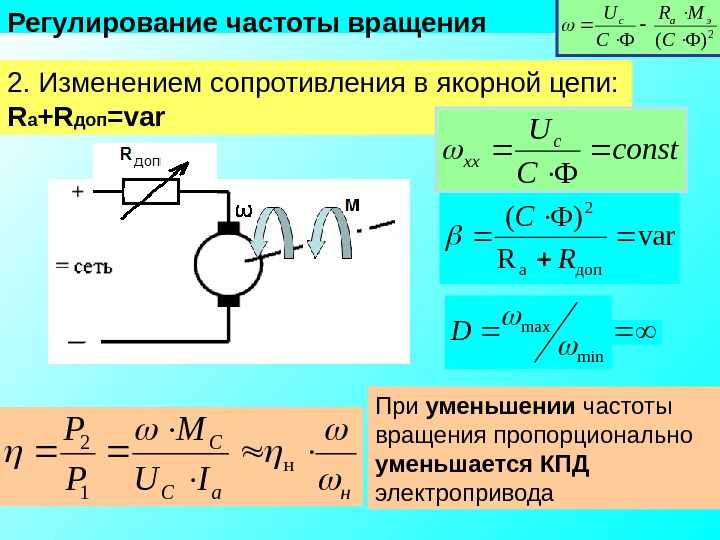
Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет
При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
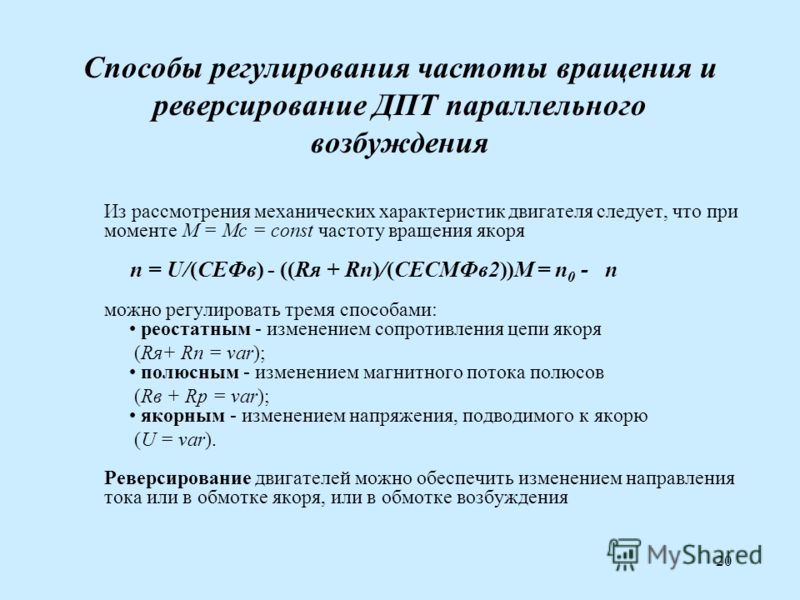
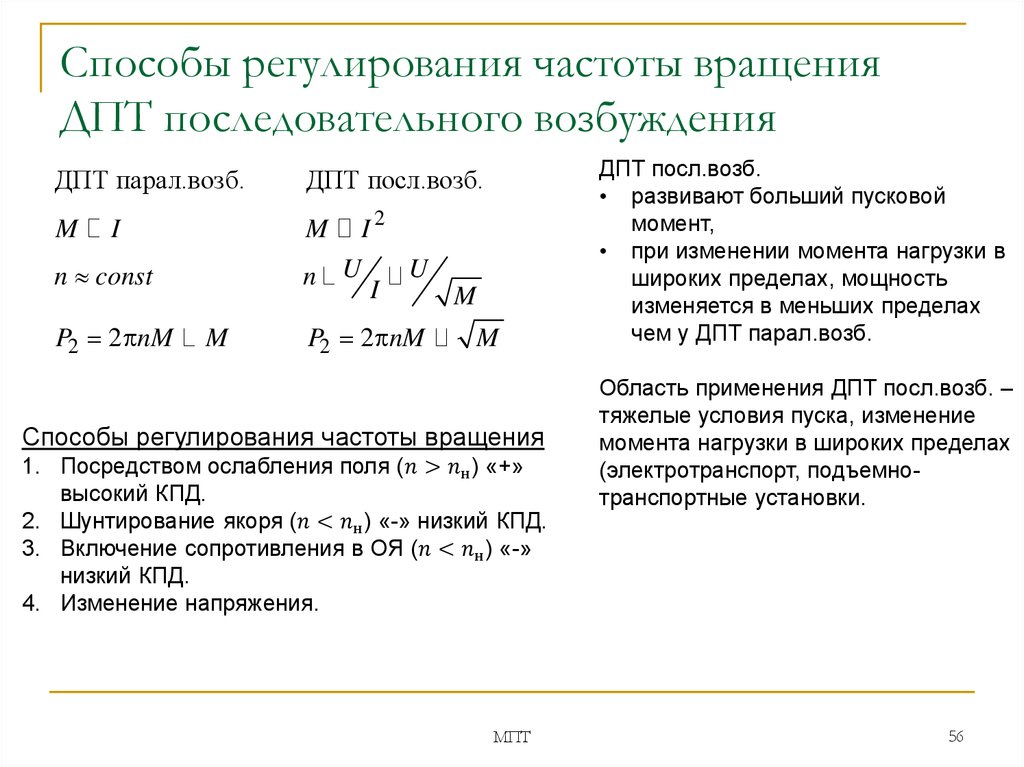
Способы регулирования частоты вращения электродвигателей постоянного тока
Рассмотрим
способы регулирования частоты вращения
электродвигателей постоянного тока на
примере электродвигателя с независимым
( параллельным ) возбуждением.
Уравнение естественной механической характеристики двигателя имеет вид
ω = – , (13-2)
где: ω – угловая скорость якоря;
U – напряжение на обмотке якоря;
k – постоянный коэффициент;
Ф – магнитный проток обмотки ( обмоток ) возбуждения;
М – электромагнитный момент электродвигателя;
R – сопротивление обмотки якоря электродвигателя.
Из уравнения (13-2) следует, что скорость двигателей с независимым (параллельным) возбуждением можно регулировать тремя способами:
1. изменением напряжения на обмотке якоря двигателя –U;
2 изменением сопротивления цепи обмотки якоря –R;
3. изменением магнитного потока полюсов –Ф.
Первый способ регулирования – изменением напряжения на обмотке якоря, применяется только для двигателей с независимым возбуждением в «системах генератор – двигатель».
Второй
способ – изменением
сопротивления цепи обмотки якоря,
на практике осуществляется путем
введения добавочных резисторов
последовательно с обмоткой якоря.
Этот способ позволяет изменить скорость двигателя только вниз от основной, причем с увеличением сопротивлений скорость двигателя уменьшается. Это объясняется увеличением падения напряжения в добавочных резисторах и уменьшением напряжения на зажимах якоря.
Положительное качество данного способа регулирования –простота, т.к. он осуществляется путем введения (выведения) ступеней регулировочного реостата в цепь обмотки якоря двигателя.
Основным недостатком способа является большой расход энергии в добавочных резисторах.
Этот способ применяется в электроприводах грузоподъемных механизмов и якорно–швартовных устройств на постоянном токе.
Третий способ – изменением магнитного потока полюсов, на практике осуществляется путем введения добавочных резисторов последовательно с параллельной обмоткой возбуждения. При этом магнитный поток возбуждения уменьшается, а скорость якоря увеличивается.
Скорость
двигателей, специально сконструированных
для работы с регулируемым потоком, может
превышать номинальную в три раза и
более, скорость остальных двигателей
повышается на 10 –
20 %.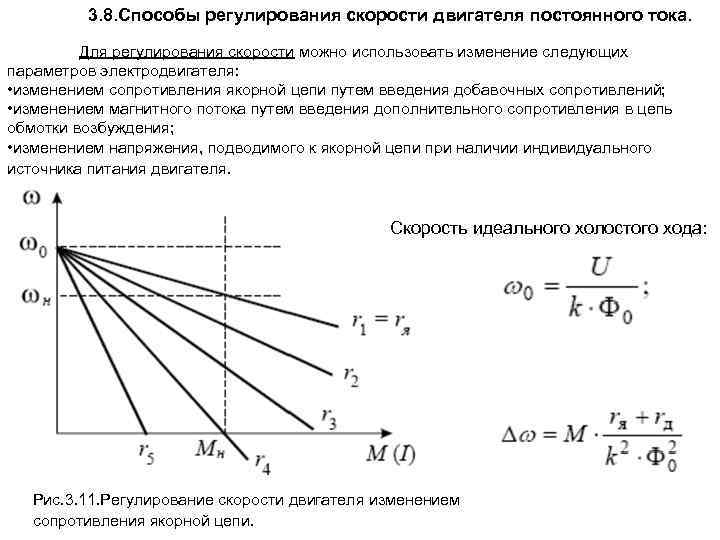 Верхний предел скорости ограничен
условиями коммутации, механической
прочности или температурой нагрева
двигателя.
Верхний предел скорости ограничен
условиями коммутации, механической
прочности или температурой нагрева
двигателя.
Положительное качество данного способа регулирования –экономичность, т.к. расход электроэнергии в регулировочном резисторе мал из-за небольшого значения тока возбуждения в цепи параллельной обмотки.
Основными недостатками способа являются возможность регулирования скорости только вверх от номинальной, а также увеличение тока якоря во столько раз, во сколько раз ослаблен магнитный поток.
Последняя особенность не позволяет применять этот способ регулирования при работе электропривода с номинальным моментом, т.к. при ослаблении потока ток якоря превысит номинальный, что недопустимо.
Поэтому
этот способ регулирования применяется
в электроприводах грузоподъемных
механизмов и якорно –швартовных
устройств для получения высоких скоростей
при перемещения холостого гака (грузовые
лебедки и краны) или швартовного каната
(брашпили, шпили), т. е. при небольшой
нагрузке на валу электродвигателя.
е. при небольшой
нагрузке на валу электродвигателя.
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки.
 Двигатели постоянного тока имеют высокий пусковой момент.
Двигатели постоянного тока имеют высокий пусковой момент. - Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
 Двигатели постоянного тока имеют высокий пусковой момент.
Двигатели постоянного тока имеют высокий пусковой момент.Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ)Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555.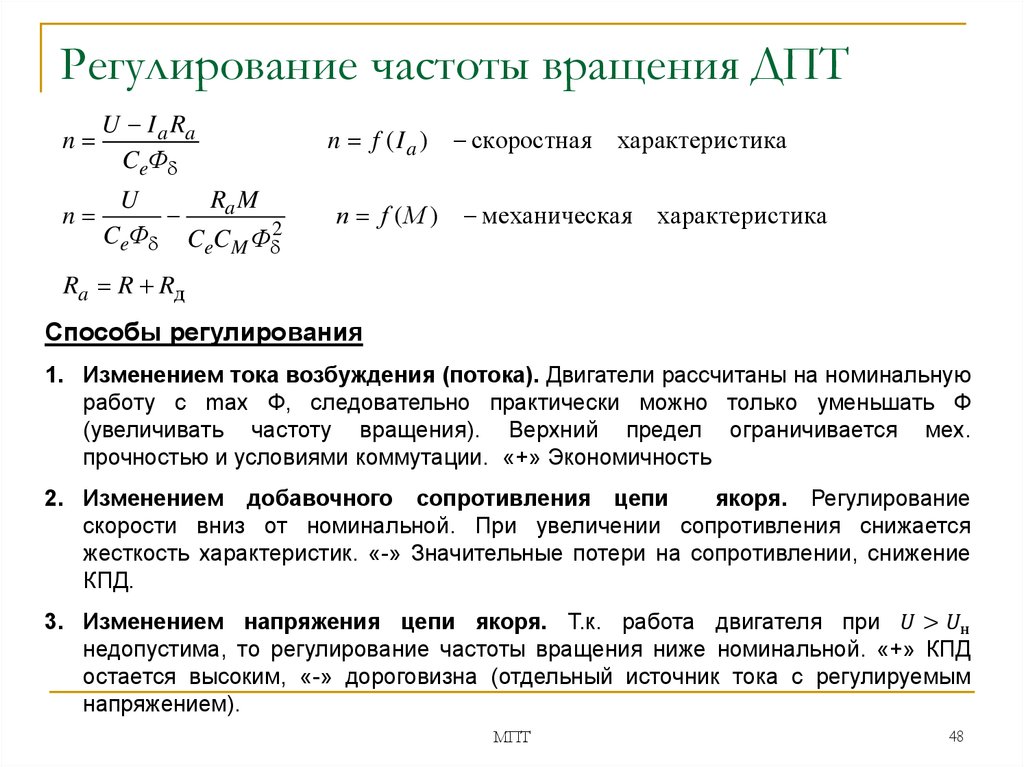 Вот схема этой цепи:
Вот схема этой цепи:
Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge.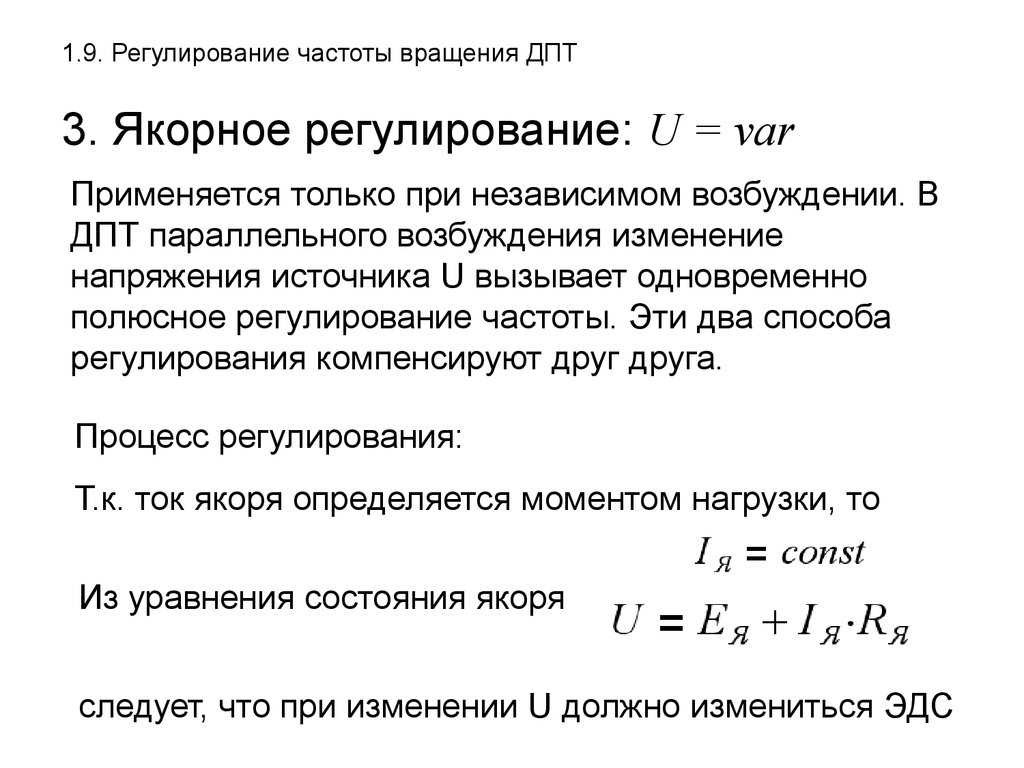 Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-Bridge:
Конфигурация транзистора H-Bridge. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D controlling two DC motorsL293D Pin Descriptions
| L293D Pin | Description | ||
| 1 (Enable 1-2) | Controls the left part of the driver | ||
| 2 (Вход-1) | Контакт входа сигнала | ||
| 3 (Выход-1) | Подключается к одной из клемм двигателя | ||
| 4 и 5 | Заземление | 0067 6 (Выход-2) | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала | ||
| 8 (Vcc2) | Напряжение питания двигателя должно быть выше чем 4,5 В | ||
| 9 (enable3-4) | Управляет правой частью драйвера | ||
| 10 (Вход-3) | Входной штифт | ||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Outupt к одному из выводов двигателя | |||
| 12 и 13 | Земля | ||
| 14 (выход-4) | подключается к одной из терминалов мотора | ||
| 15 (вход-4) | Источник питания |
 16 Vss
16 VssНадеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Способы управления скоростью двигателя постоянного тока
Скорость двигателя постоянного тока
Обратная ЭДС E b двигателя постоянного тока есть не что иное, как ЭДС индукции в проводниках якоря из-за вращения якоря в магнитном поле. Таким образом, величина E b может быть задана уравнением ЭДС генератора постоянного тока.
E b = PØNZ / 60A
(где P = количество полюсов, Ø = поток/полюс, N = скорость в об/мин, Z = количество проводников якоря, A = параллельные пути)
E b can also be given as,
E b = V- I a R a
thus, from the above equations
N = E b 60A / P ØZ
, но для двигателя постоянного тока A, P и Z являются константами
Следовательно, N ∝ K E b / Ø (где K = постоянная)
двигатель постоянного тока прямо пропорционален противо-ЭДС и обратно пропорционален потоку на полюс.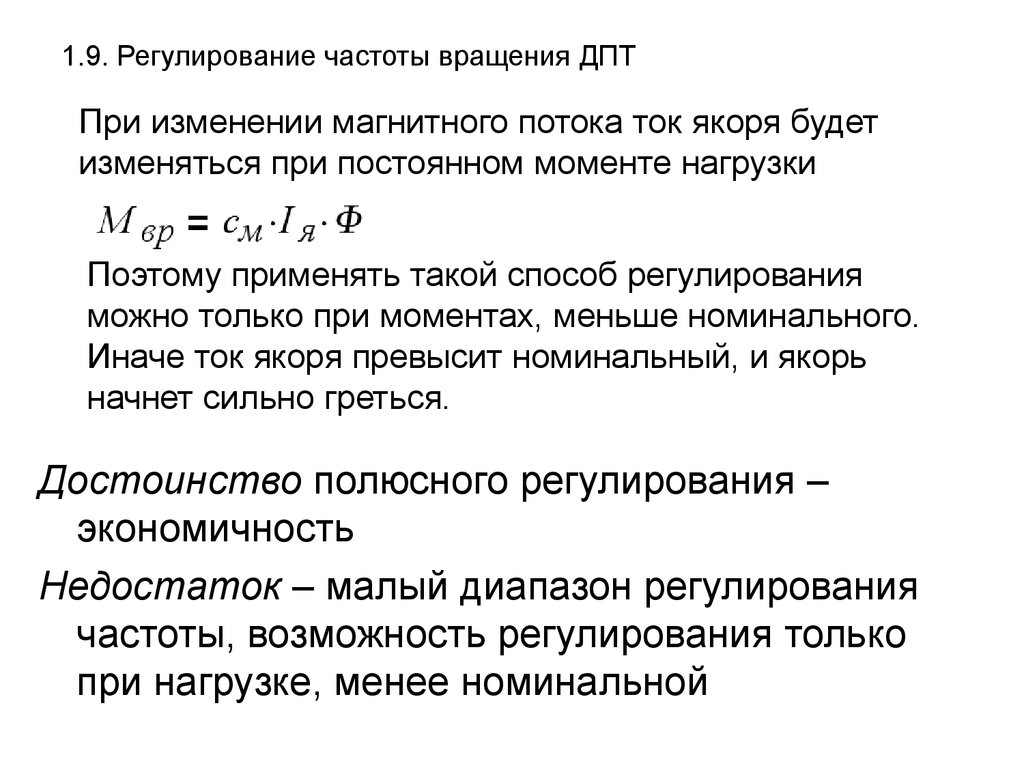
Регулятор скорости шунтового двигателя
1. Метод контроля потока
Выше уже объяснялось, что скорость двигателя постоянного тока обратно пропорциональна потоку на полюс. Таким образом, уменьшая поток, можно увеличить скорость и наоборот.
Для управления потоком последовательно с обмоткой возбуждения добавляется реостат, как показано на принципиальной схеме. Добавление большего сопротивления последовательно с обмоткой возбуждения увеличит скорость, так как уменьшит магнитный поток. В параллельных двигателях, поскольку ток возбуждения относительно очень мал, I ш 2 Р потеря небольшая. Поэтому этот метод достаточно эффективен. Хотя скорость может быть увеличена выше номинального значения за счет уменьшения потока с помощью этого метода, он накладывает ограничение на максимальную скорость, поскольку ослабление потока поля сверх установленного предела отрицательно повлияет на коммутацию.
2. Метод управления якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС E b и E b = V — I a R a . Это означает, что при напряжении питания V и сопротивлении якоря R a остаются постоянными, тогда скорость прямо пропорциональна току якоря I a . Таким образом, если добавить сопротивление последовательно с якорем, I a уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости.
3. Метод контроля напряжения
a) Управление несколькими напряжениями :
В этом методе шунтирующее поле подключается к фиксированному возбуждающему напряжению, а на якорь подается разное напряжение. Напряжение на якоре изменяется с помощью подходящего распределительного устройства. Скорость приблизительно пропорциональна напряжению на якоре.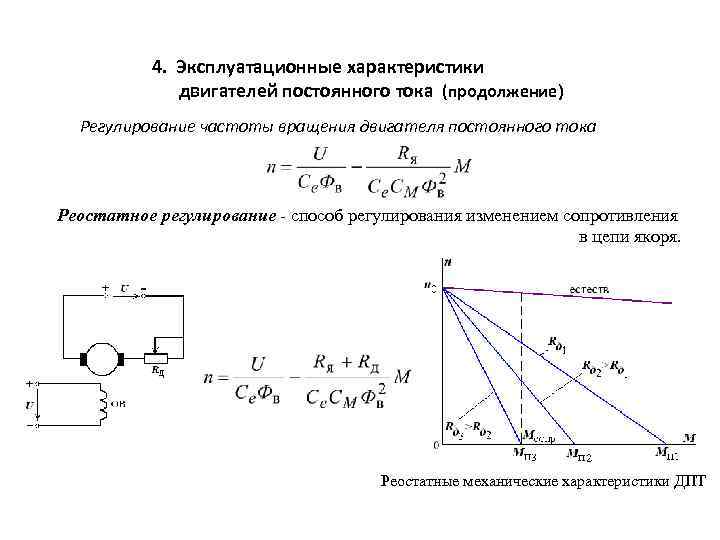
b) Система Ward-Leonard :
Эта система используется там, где требуется очень чувствительное управление скоростью двигателя (например, электрические экскаваторы, лифты и т. д.). Устройство этой системы показано на рисунке справа.
M 2 — двигатель, для которого требуется регулирование скорости.
M 1 может быть любым двигателем переменного или постоянного тока с постоянной скоростью.
G представляет собой генератор, напрямую соединенный с M 1 .
В этом методе выходной сигнал генератора G подается на якорь двигателя M 2 , скорость которого необходимо контролировать. Выходное напряжение генератора G может изменяться от нуля до максимального значения с помощью его регулятора поля и, следовательно, напряжение якоря двигателя M 2 изменяется очень плавно. Следовательно, этим способом может быть получено очень плавное управление скоростью двигателя постоянного тока .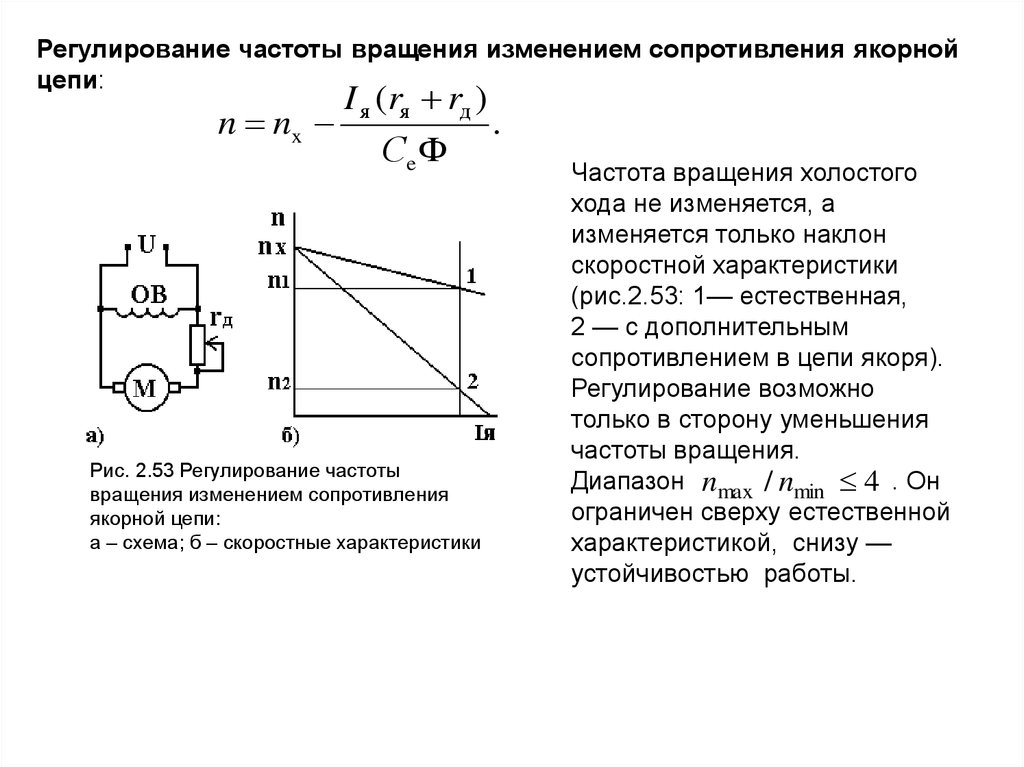
Регулятор скорости серийного двигателя
1. Метод управления потоком
- Дивертор поля : Переменное сопротивление подключается параллельно последовательному полю, как показано на рис. (a). Этот переменный резистор называется отклоняющим, так как через этот резистор можно отвести желаемую величину тока и, следовательно, можно уменьшить ток через катушку возбуждения. Таким образом, поток можно уменьшить до желаемой величины и увеличить скорость.
- Переключатель якоря : Переключатель подсоединяется к якорю, как показано на рис. (b).
При заданном постоянном крутящем моменте, если ток якоря уменьшается, тогда поток должен увеличиться, как Ta ∝ ØIa
Это приведет к увеличению тока, потребляемого от источника питания, и, следовательно, увеличится поток Ø и, следовательно, скорость двигателя уменьшится. - Управление полем с отводами : Как показано на рис. (c), катушка возбуждения имеет отводы, разделенные числом витков.