
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Разница между асинхронным и синхронным двигателем объясняется с помощью различных факторов, таких как тип возбуждения, используемый для машины. СтоимостьСинхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряженияАсинхронный двигатель дешевле, чем синхронный двигатель той же мощности и номинального напряжения. т. е. Ns = 120f/P. Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная. Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок. Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения.
Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок. Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения.
В чем разница между асинхронным двигателем и обычным двигателем? Разница между трехфазным асинхронным двигателем и синхронным двигателем. … Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная.
Что такое синхронный и асинхронный процесс? Рабочий процесс может быть синхронным или асинхронным. Синхронный процесс — это процесс, который может выполняться без перерыва от начала до конца. … Асинхронный процесс — это процесс, который Workflow Engine не может завершить немедленно, поскольку он содержит действия, которые прерывают поток.
… Асинхронный процесс — это процесс, который Workflow Engine не может завершить немедленно, поскольку он содержит действия, которые прерывают поток.
Что такое асинхронный электродвигатель? Асинхронный двигатель или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от магнитного поля обмотки статора. Таким образом, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.
Как узнать, асинхронный двигатель или синхронный? Синхронный двигатель может работать только на синхронной скорости. Короче говоря, крутящий момент в асинхронном двигателе создается за счет относительной скорости, тогда как в синхронном двигателе создание крутящего момента происходит из-за углового отставания между двумя полями.
В чем разница между синхронным и асинхронным двигателем?
Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением. Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Является ли синхронный двигатель асинхронным двигателем?
Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Что означает трехфазный двигатель?
Трехфазные двигатели — это двигатели, предназначенные для работы от трехфазного переменного тока (AC), используемого во многих промышленных приложениях. … Трехфазный переменный ток имеет три источника питания переменного тока, все они не совпадают по фазе друг с другом. Это означает, что никакие две волны переменного тока никогда не находятся в одной и той же точке в одно и то же время.
В чем разница между синхронным и асинхронным?
Синхронный = происходит одновременно. Асинхронный = не происходит одновременно. При синхронном обучении участники могут получать немедленную обратную связь. При асинхронном обучении участники могут учиться в своем собственном темпе.
Что такое трехфазный асинхронный двигатель?
Трехфазные асинхронные двигатели состоят из двух основных компонентов: статора и ротора. Статор – неподвижная часть двигателя. … Ротор – это вращающаяся часть двигателя. В роторах асинхронных двигателей с контактными кольцами имеется обмотка, а в роторе асинхронных двигателей с короткозамкнутым ротором — короткозамкнутые стержни.
Чем отличается асинхронный двигатель от синхронного?
Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением. Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Что понимают под асинхронным двигателем?
Асинхронный двигатель или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от магнитного поля обмотки статора. Таким образом, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.
Как узнать, является ли двигатель синхронным?
Чем отличаются синхронные и асинхронные двигатели?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны.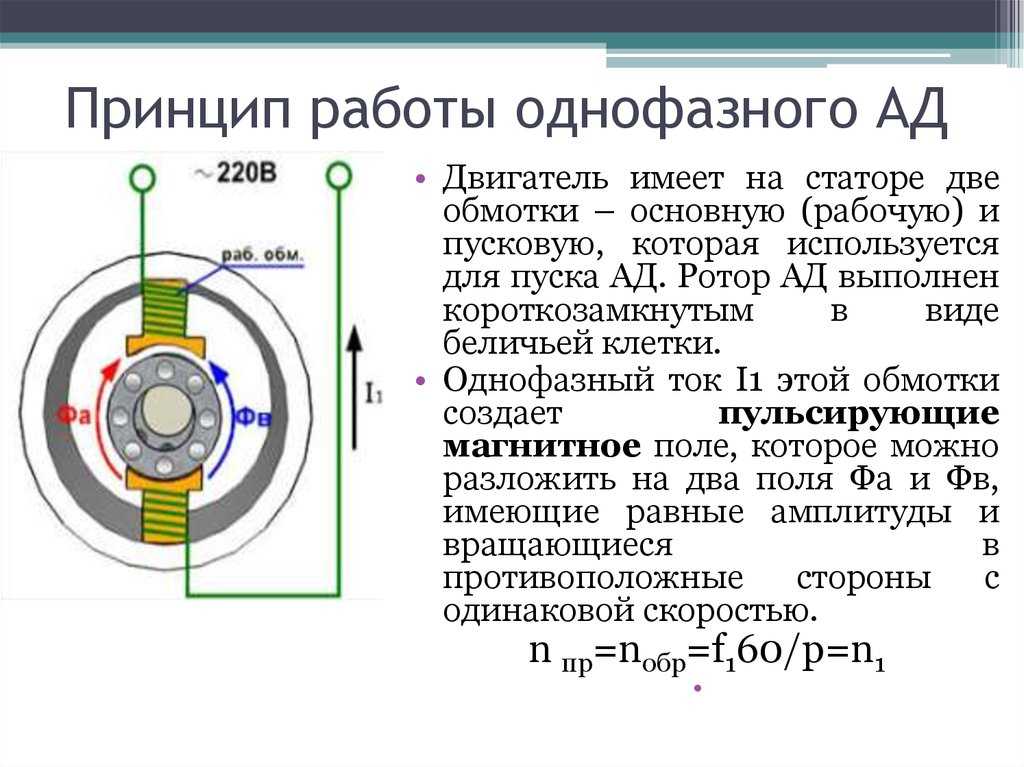 Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Что такое синхронный и асинхронный?
Асинхронное обучение
Асинхронное обучение — это общий термин, используемый для описания форм образования, обучения и обучения, которые не происходят в одном и том же месте или в одно и то же время. Он использует ресурсы, которые облегчают обмен информацией вне ограничений времени и места среди сети людей.
Википедия
В чем разница синхронного и асинхронного?
Синхронный = происходит одновременно. Асинхронный = не происходит одновременно. При синхронном обучении участники могут получать немедленную обратную связь. При асинхронном обучении участники могут учиться в своем собственном темпе.
Являются ли синхронные двигатели асинхронными?
Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
Как определить, является ли двигатель асинхронным?
Как определить, является ли двигатель асинхронным?
Как узнать, является ли двигатель асинхронным?
Асинхронный двигатель работает только с отстающим коэффициентом мощности. Ротор асинхронного двигателя не требует тока. Скорость двигателя не зависит от изменения нагрузки. Это постоянно.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
«Чем отличается синхронный двигатель от асинхронного?» — Яндекс Кью
ПопулярноеСообщества
Стать экспертом Кью
Электричество
Анонимный вопрос
·
82,3 K
На Кью задали 1 похожий вопросОтветитьУточнитьAsutpp
1,2 K
⚡Информационный сайт «ASUTPP». Статьи и рекомендации по ремонту электрооборудования… · 16 февр 2020 · asutpp.ru
Отвечает
Юрий Макаров
Асинхронный двигатель является наиболее простым вариантом электрической машины. Принцип работы асинхронного двигателя заключается в том, что по периметру цилиндрического статора расположены обмотки, подключаемые к трем фазам электрической сети.
Но в асинхронном двигателе существует небольшая разница между моментом подачи напряжения на обмотки двигателя и началом вращения ротора. То есть магнитное поле асинхронной электрической машины вращается с определенной разницей в сравнении с вращением ротора. Также существует влияние подключаемой к ротору нагрузки на его вращение, что привносит свои коррективы в общую картину.
Но в определенных устройствах такой принцип работы является неприемлемым, поэтому из асинхронного двигателя возникла усовершенствованная конструкция – синхронный двигатель. Который имеет вспомогательные элементы, которые выравнивают частоту вращения ротора электрической машины с частотой вращения магнитного поля статора. Поэтому основное отличие синхронной электрической машины от асинхронной заключается, как в конструктивных особенностей, так и в принципе взаимодействия ротора со статором.
Больше полезной информации по электрике вы можете найти на нашем сайте:
23,3 K
Комментировать ответ…Комментировать…
Тимур Кошкаров
Физика
212
Электрик с высшим образованием. Минск. · 6 янв 2021
Ротор синхронного двигателя обладает собственным магнитным полем за счет тока в его обмотке, создаваемого внешним источникам. Это магнитное поле заставляет ротор двигаться вслед за вращающимся магнитным полем статора как привязанному на жесткой сцепке. Обмотка ротора асинхронного двигателя не имеет внешнего источника питания и собственного магнитного поля. Она… Читать далее
Комментировать ответ…Комментировать…
Первый
Ситирон
-9
18 мар 2020 · cityron. ru
ru
Отвечает
Анатолий Т.
К асинхронным двигателям можно применить регулятор скорости его вращения. Если такой двигатель установлен для вращения вентилятора, его производительность меняется относительно легко различными типами регуляторов скорости.
Синхронные двигатели, практически не имеют никакого диапазона регулировки и предназначены для работы с постоянной скоростью.
25,4 K
sozercatel65
2 января 2021
Если применяются популярные сейчас частотные преобразователи, то скорость вращения синхронного двигателя… Читать дальше
Комментировать ответ…Комментировать…
Евгений З.
28,0 K
Aequĭtas sequĭtur legem · 21 июн 2018
Ротор синхронного двигателя строго «следует» за бегущим магнитным полем! Здесь определение «строго следует», подразумевает, что ротор вращается синхронно с фазой вращающего магнитного поля.
33,4 K
Саня Бочин
22 августа 2019
Красавчик!!!! 👍🏻
Объяснил так, что даже дурак поймёт!!!!!👍🏻👍🏻👍🏻👍🏻
Комментировать ответ…Комментировать…
Никита Р.
8
Электромеханик · 28 дек 2021
1. Скоростью вращения ротора. Синхронный двигатель вращается с той же скоростью, что и магнитное поле статора. Ротор асинхронного двигателя вращается с меньшей скоростью, чем магнитное поле статора (так называемое скольжение). Поэтому синхронный двигатель ставят там, где нужно постоянство частоты вращения — под разной нагрузкой синхронный двигатель будет сохранять свою… Читать далее
Комментировать ответ…Комментировать…
sozercatel65
5
Инженер электронщик · 2 янв 2021
Основное конструктивное отличие синхронного двигателя от асинхронного заключается в том, что у синхронного двигателя вектор магнитного поля ротора физически «зафиксирован» в статоре с помощью сильных магнитов, которые и определяют его более высокую стоимость по сравнению с асинхронным двигателем той же мощности.
Комментировать ответ…Комментировать…
Вы знаете ответ на этот вопрос?
Поделитесь своим опытом и знаниями
Войти и ответить на вопрос
1 ответ скрыто(Почему?)
Ответы на похожие вопросы
Дмитрий Клименко
Менеджмент
81
просто инженер · 25 апр 2021
У асинхронного двигателя электромагнитное поле, которое вырабатывается электросетью (трёхфазной), наводит ЭДС в роторе, которая вырабатывает собственный поток взаимоиндукции и приводит вал во вращение.
У Асинхронного двигателя ротор запаздывает относительно магнитного поля питающей сети в зависимости от нагрузки на его валу.
И поэтому у асинхронного двигателя есть такой параметр — как скольжение — разность скоростей вращения ротора и вращающегося магнитного поля в статоре… Асинхронный двигатель не может достичь синхронной скорости вращения ротора с полем в статоре даже три отсоединенной нагрузке, так как при ней проводники ротора не будут пересекаться магнитным полем, и в них не будет наводиться ЭДС, а значит не будет тока и магнитного поля. Поэтому скольжение в асинхронном двигателе будет присутствовать всегда.
У синхронного электродвигателя частота вращения ротора всегда равна частоте вращения электромагнитного поля.
У этих двух типов двигателей разные области применения: Синхронные электродвигатели отличаются гораздо большей мощностью и полезной нагрузкой, но они дороже и сложней. И поэтому асинхронные двигатели тоже востребованы там, где достаточно их характеристик, ведь они дешевле и проще в изготовлении.
Комментировать ответ…Комментировать…
Синхронные электродвигатели | Электротехника и электрооборудование
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 11 из 39
По своему устройству синхронный двигатель аналогичен синхронному генератору, но он имеет дополнительную пусковую обмотку. Принцип действия синхронного двигателя основан на взаимодействии полюсов вращающегося магнитного поля, созданного обмоткой статора, обтекаемой трехфазным током, с магнитными полюсами ротора, обмотки которого питаются постоянным током. Скорость вращения синхронного двигателя постоянна независимо от нагрузки и равна скорости вращения магнитного поля; по этой причине двигатель получил название синхронного; вращение ротора у него совпадает (синхронно) с вращением магнитного поля статора. Механическая характеристика двигателя, т. е. скорость его вращения, зависящая от нагрузки, является абсолютно жесткой, при которой число оборотов постоянно.
Принцип действия синхронного двигателя основан на взаимодействии полюсов вращающегося магнитного поля, созданного обмоткой статора, обтекаемой трехфазным током, с магнитными полюсами ротора, обмотки которого питаются постоянным током. Скорость вращения синхронного двигателя постоянна независимо от нагрузки и равна скорости вращения магнитного поля; по этой причине двигатель получил название синхронного; вращение ротора у него совпадает (синхронно) с вращением магнитного поля статора. Механическая характеристика двигателя, т. е. скорость его вращения, зависящая от нагрузки, является абсолютно жесткой, при которой число оборотов постоянно.
Пуск двигателя в ход производится после предварительного его разгона по скорости, равной не менее 0,95 номинального числа оборотов, что осуществляется наличием специальной пусковой обмотки типа беличьего колеса, как у асинхронного двигателя. Такой способ пуска называется асинхронным. После разгона двигателя включается постоянный ток в обмотку ротора, полюса которого входят в синхронизм с, полюсами вращающегося магнитного поля. Некоторые типы синхронных двигателей пускают в ход с помощью других двигателей.
Некоторые типы синхронных двигателей пускают в ход с помощью других двигателей.
При холостом ходе оси полюсов ротора и вращающего поля статора двигателя совпадают. При увеличении нагрузки двигателя происходит сдвиг оси полюсов ротора относительно полюсов поля статора на угол φ и при некоторой максимальной нагрузке двигатель выпадает из синхронизма и останавливается в результате слабого взаимодействия между полюсами ротора и статора, обусловленного значительным расстоянием между ними. Максимальный (опрокидывающий) момент синхронного двигателя в 2,5-3 раза превышает номинальный его момент при нормальном токе возбуждения. Изменение угла между осями полюсов ротора и статора приводит к изменению угла сдвига фаз между напряжением и электродвижущей силой синхронного двигателя.
Преимущество синхронных двигателей заключается в возможности работать с высоким коэффициентом мощности cos φ.
Регулирование cos φ синхронного двигателя достигается изменением величины постоянного тока возбуждения машины, при определенной величине которого можно получить значение коэффициента мощности, равное единице.
В отличие от двигателей постоянного тока, у которых при изменении тока возбуждения изменяется скорость вращения, у синхронных двигателей скорость остается постоянной, не зависящей от тока возбуждения. Однако при этом в больших пределах может изменяться ток статора синхронного двигателя при постоянной нагрузке на его валу и постоянной потребляемой мощности. При постоянной потребляемой мощности двигателя Р — ]/3/U cos φ и постоянной! приложенном напряжении U ток I будет зависеть от cos φ, т. е. при уменьшении cos φ ток будет увеличиваться. В то же время угол φ сдвига фаз между напряжением и током двигателя зависит от тока его возбуждения.
Рис. 7.17. U-образная кривая зависимости рабочего тока синхронного двигателя от тока возбуждения
Влияние величины тока возбуждения на угол сдвига фаз и на величину тока двигателя при постоянной нагрузке на графике имеет вид U-образной кривой (рис. 7.17). Из графика видно, что при уменьшении тока возбуждения ниже номинальной величины ток в цепи статора возрастает (левая часть кривой), но при этом угол сдвига фаз положителен φ > 0, т. е. ток отстает от напряжения. При увеличении тока возбуждения свыше номинальной величины (правая часть кривой) рабочий ток / двигателя также увеличивается, но при этом угол сдвига фаз будет отрицательный!: φ < 0, т. е. ток опережает напряжение.
е. ток отстает от напряжения. При увеличении тока возбуждения свыше номинальной величины (правая часть кривой) рабочий ток / двигателя также увеличивается, но при этом угол сдвига фаз будет отрицательный!: φ < 0, т. е. ток опережает напряжение.
Таким образом, перевозбужденный синхронный двигатель работает подобно емкости, включенной в цепь данной установки, что имеет большое практическое значение для улучшения коэффициента мощности (cos φ) установки.
По указанным причинам за последние годы расширяется применение синхронных двигателей в промышленности и на строительстве, где они применяются для привода компрессорных и насосных установок, а также для привода камнедробилок и экскаваторов.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Учеба
- Электрические сети и системы
 org/ListItem»> Книги
org/ListItem»> КнигиЕще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.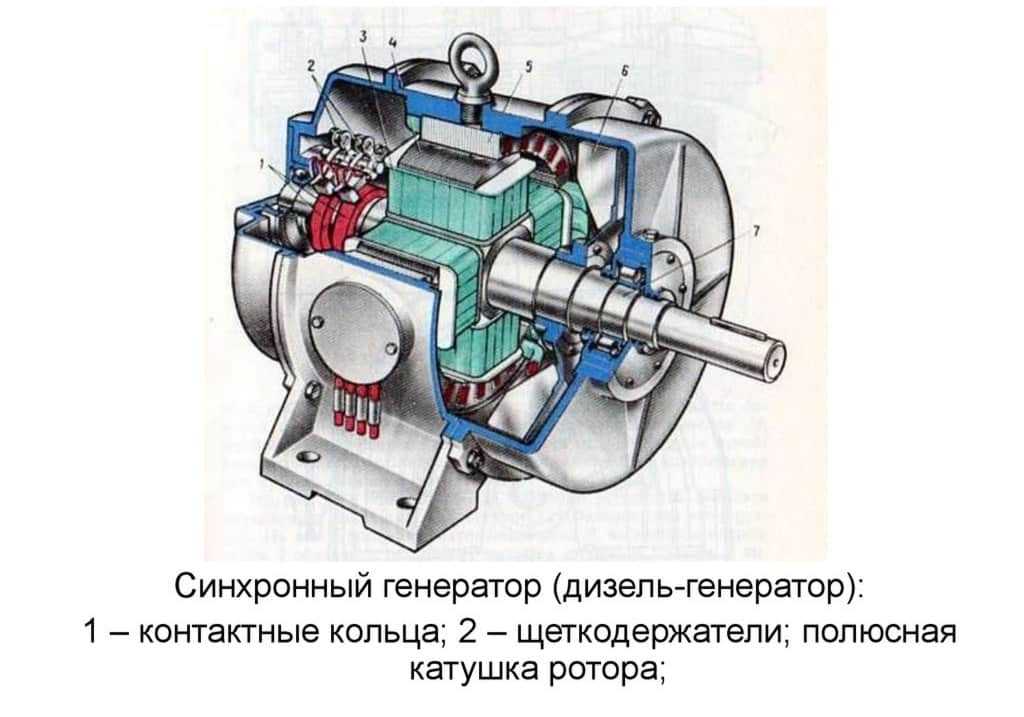
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети.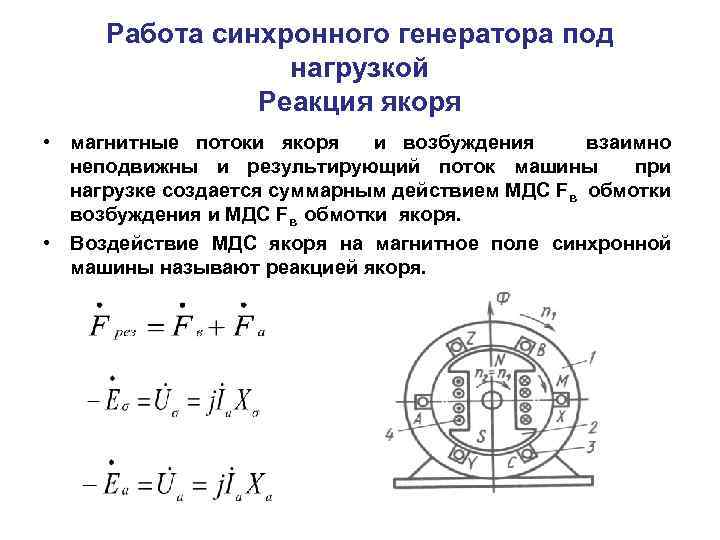 Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.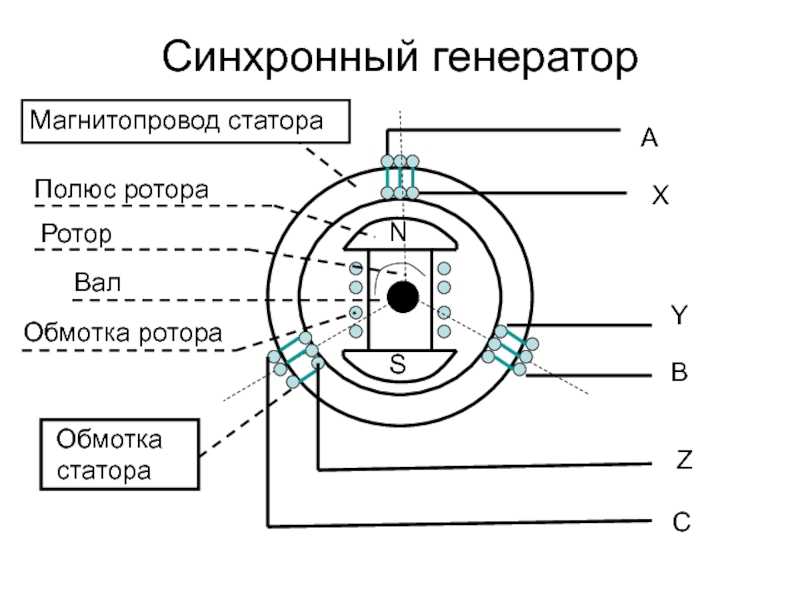
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.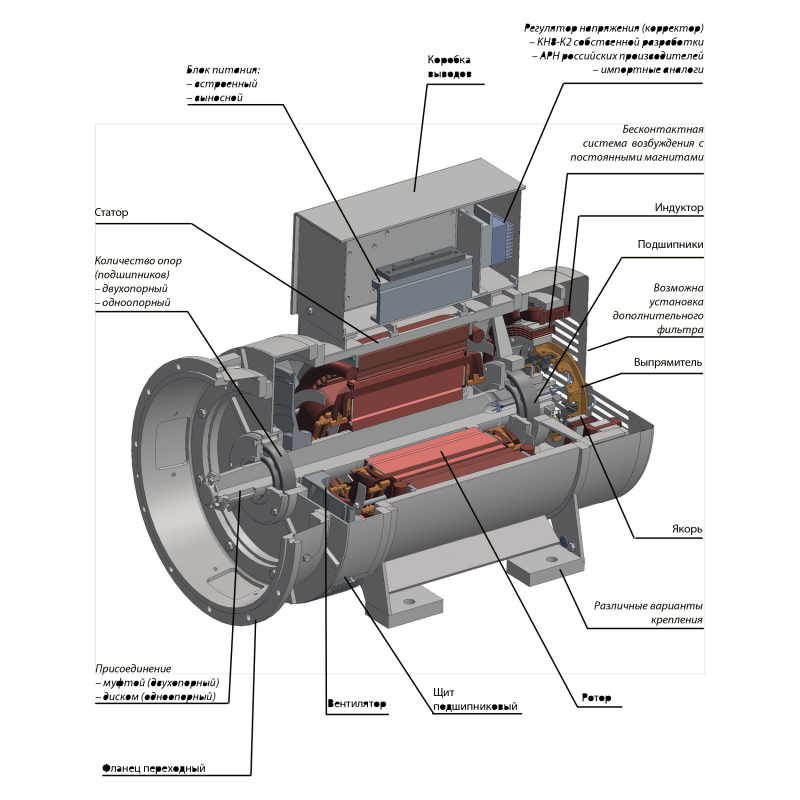
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.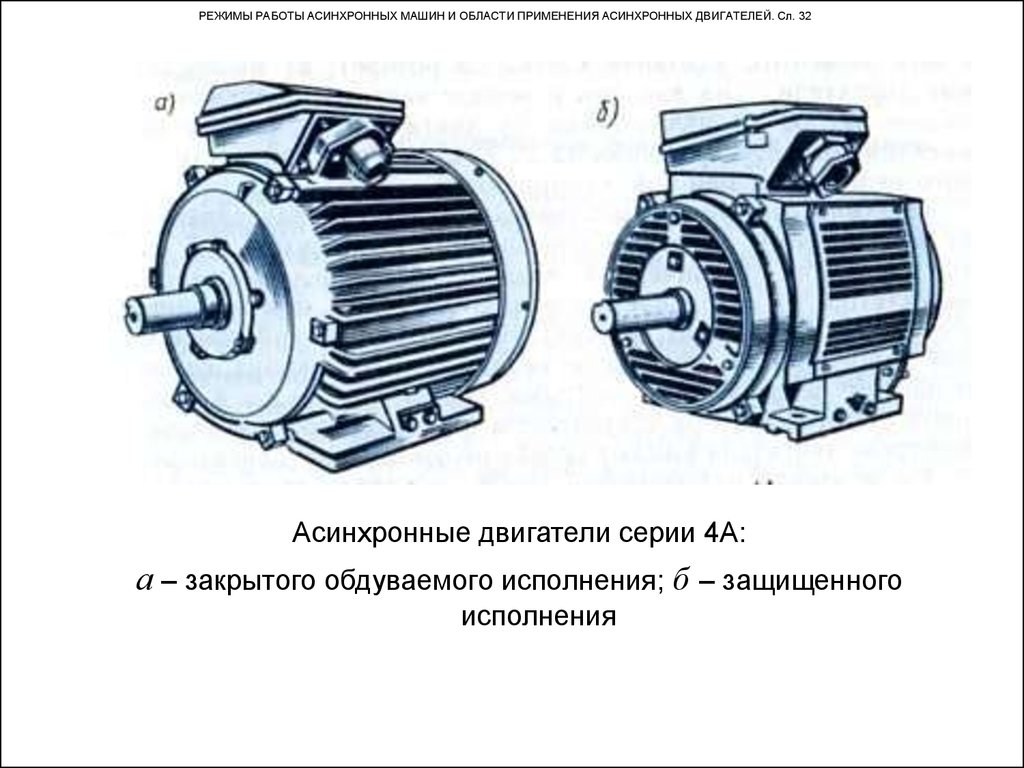
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.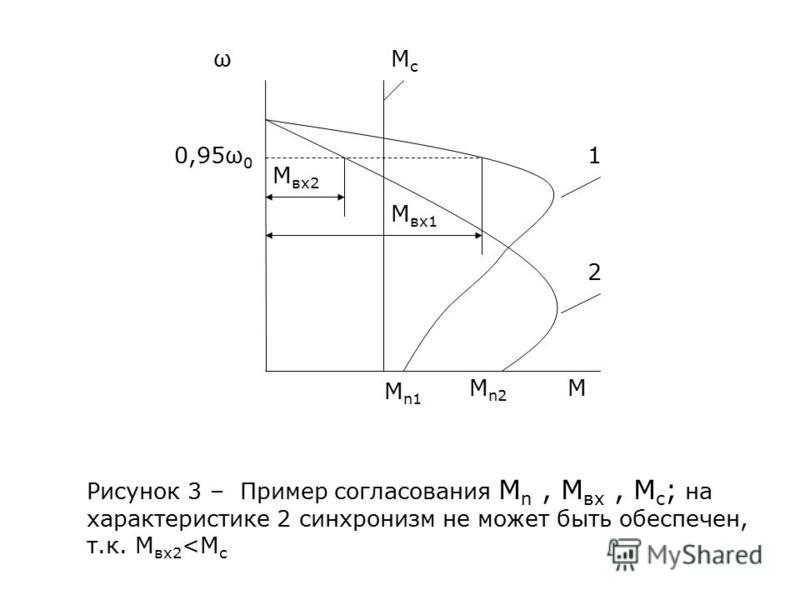 п.
п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую. По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
- Строение синхронного двигателя
- Принципы работы синхронного двигателя
- Способы запуска
- Применение
- Устройство и принцип действия синхронного двигателя
- Отличие от асинхронного мотора
- Конструкция мотора
- Как работает двигатель
- Синхронные генераторы
- Полюсы обмоток двигателя
- Воздействие полюсов
- Запуск электродвигателей синхронного типа
- Более современный способ разгона
- Преимущества и недостатки синхронных моторов
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Ns = 120F/p
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока. На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.

- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
//www.youtube.com/embed/5k3sXBMBKEw?feature=player_detailpage
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.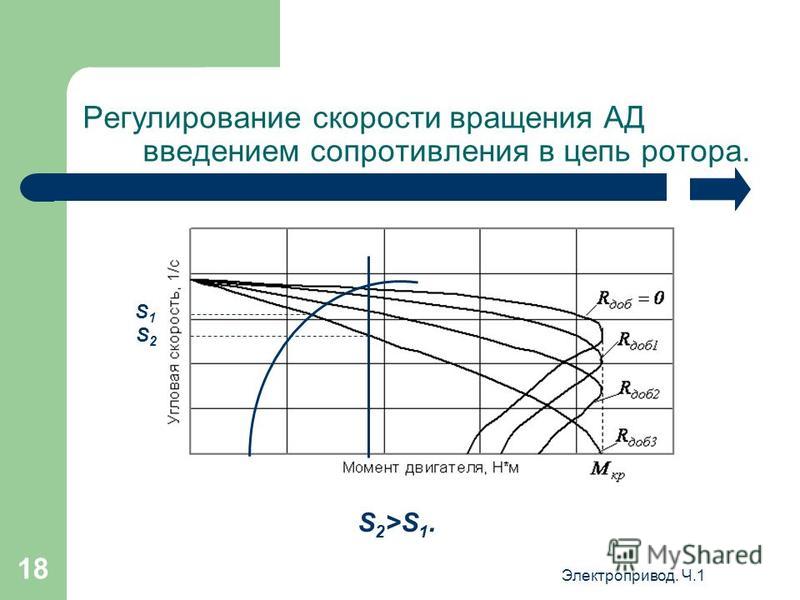
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 1 чел.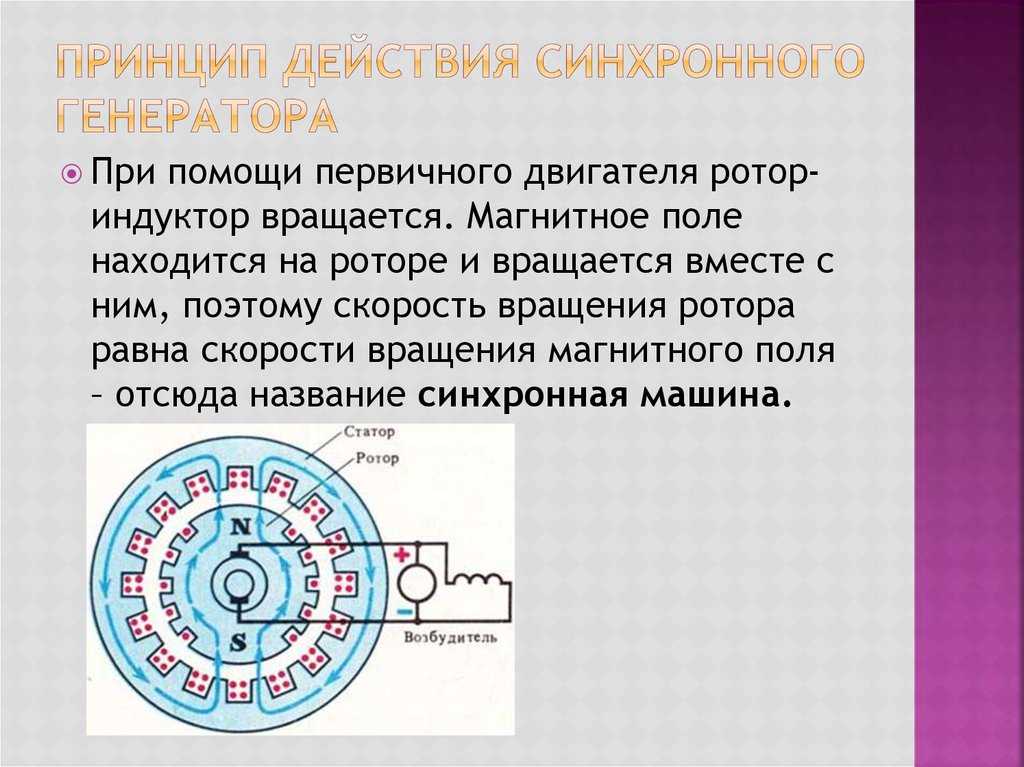
Средний рейтинг: 5 из 5.
Чем отличается синхронный от асинхронного электродвигателя
В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.
Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.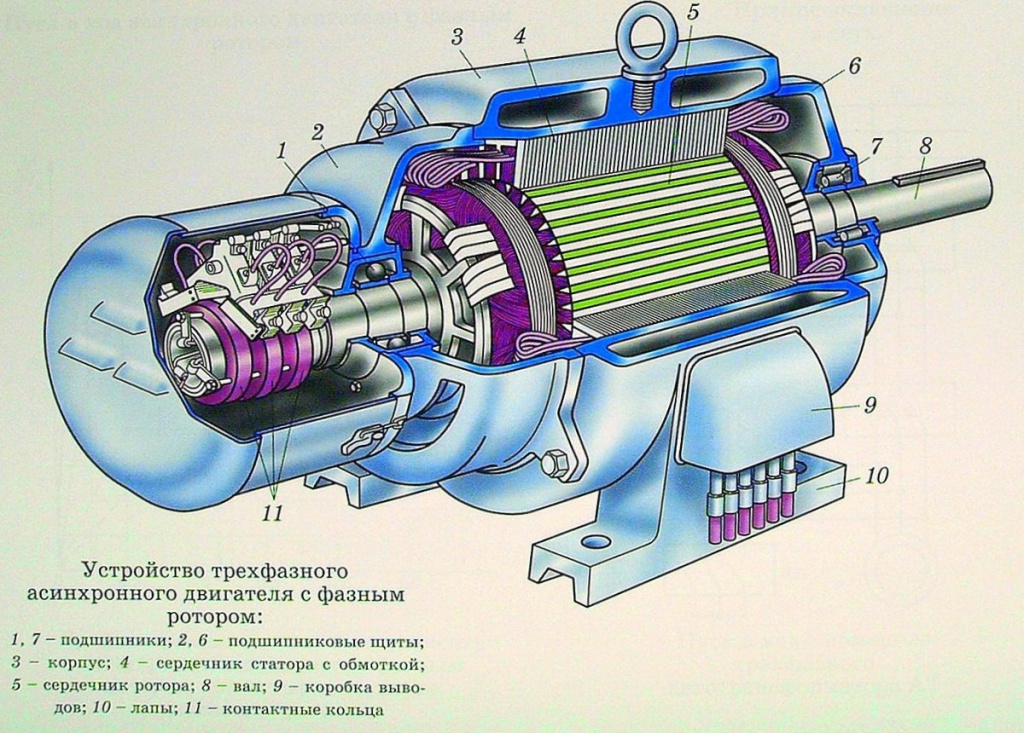
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И на справочной табличке мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты. Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах — выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор.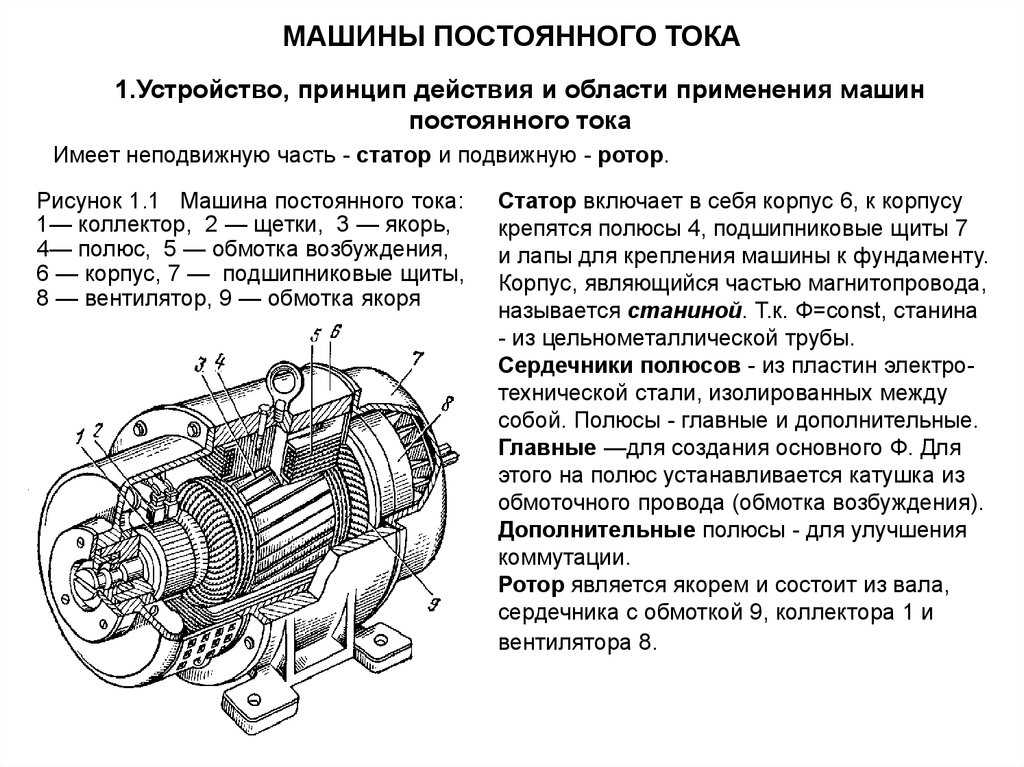 Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают — и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.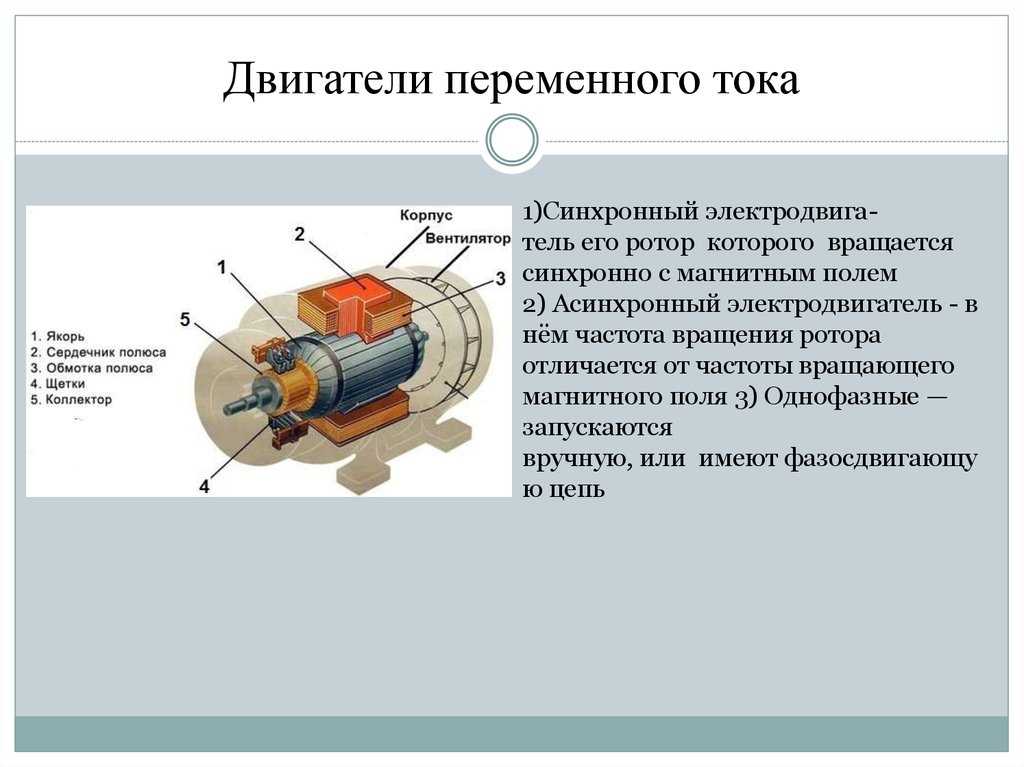
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора — мотор болгарки).
Асинхронный двигательи синхронный двигатель — разница Wiki
Основное отличиеАсинхронный двигатель и синхронный двигатель — есть ли разница?Основное различие между асинхронным двигателем и синхронным двигателем заключается в том, что скорость асинхронного двигателя постоянно меняется в зависимости от нагрузки, тогда как синхронный двигатель всегда работает синхронно. скорость.
РЕКЛАМА
Разница между асинхронным двигателем и синхронным двигателем
Асинхронный двигатель и синхронный двигатель
Тип двигателя переменного тока, рабочая скорость которого зависит от нагрузки, известен как асинхронный двигатель, тогда как тип двигателя переменного тока, скорость которого прямо пропорциональна частоте рабочего тока, известен как синхронный двигатель.
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель также считается асинхронным двигателем. С другой стороны, другого названия синхронного двигателя не существует.
Асинхронный двигатель и синхронный двигатель
Рабочая скорость асинхронного двигателя зависит от нагрузки, т. е. скорость двигателя уменьшается с увеличением нагрузки, наоборот, скорость синхронного двигателя не зависит от нагрузки.
Асинхронный двигатель и синхронный двигатель
Асинхронные двигатели имеют простую конструкцию. С другой стороны, синхронные двигатели имеют сложную конструкцию.
Асинхронный двигатель и синхронный двигатель
В системе питания асинхронного двигателя обмотка статора связана с источником переменного тока. С другой стороны, в синхронном двигателе обмотка якоря питается от источника переменного тока, а обмотка возбуждения питается от источника постоянного тока.
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель представляет собой самозапускающийся двигатель, в котором крутящий момент создается за счет реакции между изменяющимся магнитным полем, создаваемым в статоре, и током, индуцируемым в катушках ротор. С другой стороны, синхронный двигатель не может запускаться самостоятельно. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока.
С другой стороны, синхронный двигатель не может запускаться самостоятельно. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока.
РЕКЛАМА
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель работает с отстающим коэффициентом мощности, потому что коэффициент мощности становится очень низким при высоких нагрузках. С другой стороны, синхронный двигатель, спроектированный таким образом, чтобы его можно было использовать как с опережающей, так и с отстающей мощностью, модифицировал его питание.
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель имеет меньший КПД, тогда как синхронный двигатель имеет более высокий КПД по сравнению с асинхронным двигателем того же номинального напряжения и мощности.
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель имеет низкую цену, в то время как синхронный двигатель имеет высокую цену по сравнению с асинхронным двигателем того же номинального напряжения и мощности.
Асинхронный двигатель и синхронный двигатель
Асинхронный двигатель используется только для управления механическими нагрузками. С другой стороны, синхронный двигатель используется для подачи крутящего момента для привода механических нагрузок, а также для коррекции коэффициента мощности.
Сравнительная таблица
| Асинхронный двигатель | Синхронный двигатель |
| Тип двигателя переменного тока, рабочая скорость которого зависит от нагрузки, известен как асинхронный двигатель. | Тип двигателя переменного тока, в котором скорость прямо пропорциональна частоте рабочего тока, известен как синхронный двигатель. |
| Также известен как | |
| Асинхронный двигатель также называется асинхронным двигателем. | Другого имени нет. |
| Скорость | |
Его рабочая скорость зависит от нагрузки, т. е. скорость двигателя уменьшается с увеличением нагрузки. е. скорость двигателя уменьшается с увеличением нагрузки. | Скорость синхронного двигателя не зависит от нагрузки. |
| Возбуждение | |
| Асинхронный двигатель представляет собой тип машины с одним возбуждением. | Такой двигатель относится к типу машин с двойным возбуждением. |
| Обмотка | |
| В системе питания асинхронного двигателя обмотка статора подключена к источнику переменного тока. | В синхронном двигателе обмотка якоря питается от источника переменного тока, а источник постоянного тока питает обмотку возбуждения. |
| Пуск | |
| Имеет возможность самозапуска. | Самостоятельный запуск невозможен. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока. |
| Функция | |
Этот двигатель работает с отстающим коэффициентом мощности только потому, что коэффициент мощности становится очень низким при высоких нагрузках. | Этот двигатель сконструирован таким образом, что, изменяя его возбуждение, он может работать как с опережающей, так и с отстающей мощностью. |
| КПД | |
| Асинхронный двигатель имеет меньший КПД. | Обладает высокой эффективностью. |
| Стоимость | |
| Имеет низкую цену. | Имеет высокую цену. |
| Конструкция | |
| Асинхронные двигатели имеют простую конструкцию. | У них сложный дизайн. |
| Использование | |
| Асинхронный двигатель используется только для управления механическими нагрузками. | Синхронный двигатель используется для передачи крутящего момента для привода механических нагрузок, а также для коррекции коэффициента мощности. |
РЕКЛАМА
Асинхронный двигатель
против Синхронный двигатель Асинхронный двигатель также признан синхронным двигателем. С другой стороны, синхронный двигатель не имеет другого названия. Асинхронный двигатель — это тип двигателя переменного тока, рабочая скорость которого зависит от нагрузки, т. е. скорость двигателя уменьшается с увеличением нагрузки. С другой стороны, скорость синхронного двигателя не зависит от нагрузки. Он продолжает работать с синхронной скоростью.
С другой стороны, синхронный двигатель не имеет другого названия. Асинхронный двигатель — это тип двигателя переменного тока, рабочая скорость которого зависит от нагрузки, т. е. скорость двигателя уменьшается с увеличением нагрузки. С другой стороны, скорость синхронного двигателя не зависит от нагрузки. Он продолжает работать с синхронной скоростью.
Асинхронный двигатель относится к типу машины с одинарным возбуждением, тогда как синхронный двигатель относится к типу машины с двойным возбуждением. Асинхронный двигатель имеет простую конструкцию, а синхронный двигатель имеет сложную конструкцию. В системе питания асинхронного двигателя обмотка статора связана с источником переменного тока. С другой стороны, в синхронном двигателе обмотка якоря питается от источника переменного тока, а источник постоянного тока питает обмотку возбуждения.
Асинхронный двигатель представляет собой самозапускающийся двигатель, в котором крутящий момент создается за счет реакции между изменяющимся магнитным полем, создаваемым в статоре, и током, индуцируемым в обмотках ротора.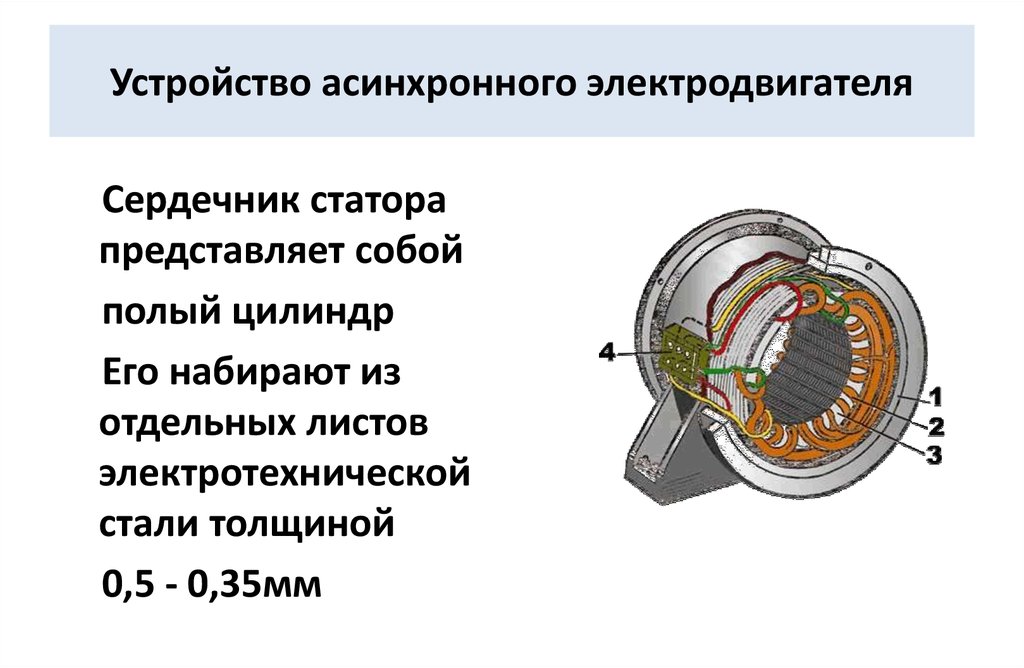 С другой стороны, синхронный двигатель не может запускаться самостоятельно. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока.
С другой стороны, синхронный двигатель не может запускаться самостоятельно. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока.
Асинхронный двигатель работает с отстающим коэффициентом мощности только потому, что коэффициент мощности становится очень низким при высоких нагрузках. С другой стороны, синхронный двигатель сконструирован таким образом, что он может работать как с опережающей, так и с отстающей мощностью за счет изменения его возбуждения. Асинхронный двигатель имеет меньший КПД по сравнению с синхронным двигателем того же номинального напряжения и мощности.
Асинхронный двигатель имеет более низкую цену по сравнению с синхронным двигателем того же номинального напряжения и мощности. Асинхронный двигатель используется только для управления механическими нагрузками. С другой стороны, синхронный двигатель используется для подачи крутящего момента для привода механических нагрузок, а также для коррекции коэффициента мощности.
Что такое асинхронный двигатель
?Асинхронный двигатель представляет собой двигатель переменного тока, рабочая скорость которого зависит от нагрузки. Он также признан асинхронным двигателем. Это один из первых изобретенных электродвигателей, имеющий простую конструкцию. В настоящее время асинхронный двигатель является наиболее распространенным электродвигателем, который используется в промышленности.
Асинхронный двигатель имеет простую конструкцию, состоящую из внешнего статора и внутреннего ротора. Эти части взаимодействуют посредством эффекта электромагнитной индукции, создавая механическое вращение. Различные типы асинхронных двигателей достигают этого вращения по-разному. В системе питания асинхронного двигателя обмотка статора связана с источником переменного тока.
Асинхронный двигатель может запускаться самостоятельно. Такой двигатель играет свою роль, пропуская переменный ток через катушки в статоре, который создаст магнитное поле, а частота колебаний источника переменного тока будет вращать это магнитное поле. Это RMF или вращающееся магнитное поле будет создавать противоположные магнитные поля в роторе и вызывать полезное вращение.
Это RMF или вращающееся магнитное поле будет создавать противоположные магнитные поля в роторе и вызывать полезное вращение.
Рабочая скорость асинхронного двигателя не синхронна и зависит от нагрузки, т. е. скорость двигателя уменьшается с увеличением нагрузки. Так вот, частота его переменного тока не соответствует числу оборотов выходного вала. Этот процесс называется «проскальзыванием», потому что он происходит за счет магнитной игры «догоняющего», которую играют ротор с ВМП. Таким образом, из-за наличия скольжения точная синхронизация с асинхронными двигателями затруднена.
Работает только при запаздывающем коэффициенте мощности, потому что коэффициент мощности становится очень низким при высоких нагрузках. Асинхронный двигатель имеет меньший КПД по сравнению с синхронным двигателем с такими же свойствами. Поскольку асинхронный двигатель не имеет коллектора, щеток и других подобных движущихся частей, он прост в изготовлении и дешевле по сравнению с синхронным двигателем.
Асинхронный двигатель используется только для управления механическими нагрузками. Так, эти двигатели используются в бытовой технике, крупном механизированном промышленном оборудовании, электромобилях. Более того, асинхронные двигатели доступны с сотнями крутящих моментов, напряжений, скоростей, размеров и форм.
Что такое синхронный двигатель
?Это тип двигателя переменного тока, в котором скорость прямо пропорциональна частоте рабочего тока. Он покрывает основания, которые не могут быть покрыты асинхронным двигателем. Имеет сложную конструкцию. В своей конструкции статор или ротатор имеет осевые прорези, включающие скручивание вращателя, намотанного на определенное количество полюсов. Причем обмотка ротора смонтирована на явнополюсном роторе, на который подается постоянный ток с помощью токосъемных колец. Мы также можем использовать ротор с постоянными магнитами.
Синхронный двигатель продолжает работать с синхронной скоростью, поскольку его выходная частота вращения равна входной частоте переменного тока, поэтому эти двигатели могут использоваться разработчиками в точно рассчитанных приложениях, например, в прокатных станах, проигрывателях, часах и т. д. Эта цель достигается путем соединения магнитных полюсов статора и ротора. За счет этого статор RMF вращает ротор с синхронными скоростями.
д. Эта цель достигается путем соединения магнитных полюсов статора и ротора. За счет этого статор RMF вращает ротор с синхронными скоростями.
Для установившейся работы таких двигателей постоянное соотношение между скоростью вращения ротора и частотой сети определяется как N = Ns = 120f / p, где f — частота сети, p — число полюсов двигателя , Ns — синхронная скорость.
Самостоятельный запуск невозможен. Для этого необходимо, чтобы источник был запущен до синхронной скорости перед его синхронизацией с источником переменного тока. Более того, поскольку они имеют синхронную скорость, то изменить их скорость затруднительно. Именно поэтому конструкторы использовали контроллер двигателей переменного тока для управления скоростью таких двигателей. Такой двигатель представляет собой тип машины с двойным возбуждением. Он спроектирован таким образом, что его можно использовать как с опережающей, так и с отстающей мощностью, изменяя его возбуждение. Он имеет высокий КПД и высокую цену по сравнению с асинхронным двигателем того же номинального напряжения и мощности.
Синхронные двигатели делятся на разные типы в зависимости от их способов создания магнитного поля. Внешний источник используется для питания магнитных полюсов двигателей с независимым возбуждением. С другой стороны, в машинах с самовозбуждением, без возбуждения или с прямым возбуждением магнитные полюса возбуждают сам двигатель. Примерами типов без возбуждения являются реактивные двигатели, двигатели с постоянными магнитами и двигатели с гистерезисом. Синхронный двигатель используется для передачи крутящего момента для привода механических нагрузок, а также для коррекции коэффициента мощности. Он имеет большое значение в дробилках, мельницах, мельницах и других низкоскоростных и мощных устройствах.
ЗаключениеВышеизложенное подытоживает, что асинхронный двигатель представляет собой тип двигателя переменного тока с простой конструкцией и низким КПД, рабочая скорость которого зависит от нагрузки. С другой стороны, синхронный двигатель представляет собой тип двигателя переменного тока со сложной конструкцией, высоким КПД и синхронной скоростью.
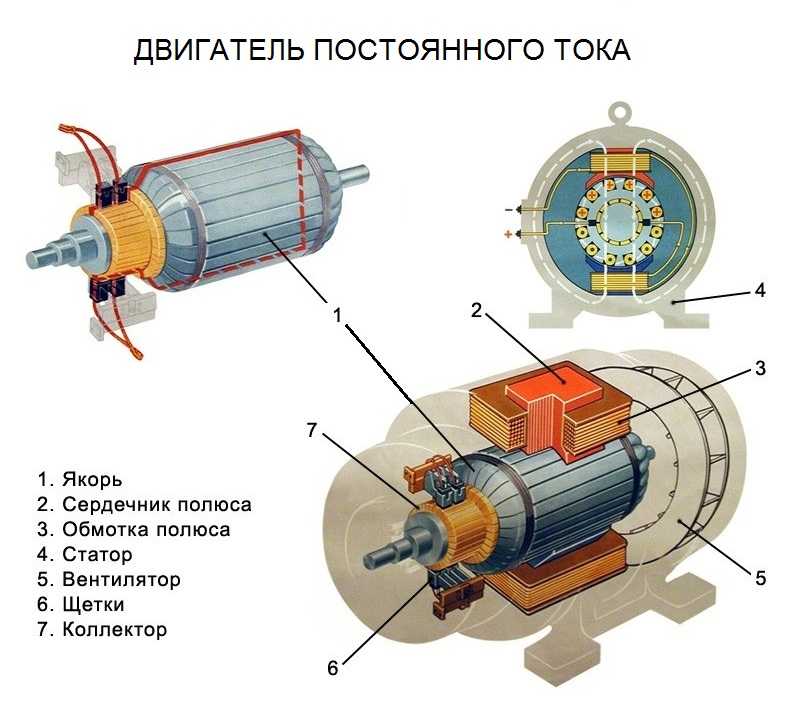
Разница между синхронным двигателем и асинхронным двигателем Архив
7 ноября 2015 г. 11:10 | Оставить комментарий | Фироз
MEO Orals on Marine Electro Technology Function 5- Part 6Что такое асинхронный двигатель?
- Это двигатель, который работает со скоростью ниже скорости вращающегося магнитного поля. Типы
- : асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с контактным кольцом.
Асинхронный двигатель с короткозамкнутым ротором
- Наиболее широко используемый из всех типов двигателей переменного тока благодаря простоте, прочности конструкции и простоте обслуживания
- Состоит из двух основных частей, ротора и статора, между которыми нет прямого электрического соединения.
- Без проволочной обмотки и токосъемных колец.
- Ротор имеет ряд гладких стержней (медь или алюминий), установленных в пазах на длину железного сердечника
- Каждый конец стержня спаян с двумя тяжелыми медными кольцами, по одному на каждом конце. Эти прутья образуют клетку, похожую на клетку для белок .
- Статор имеет 3 отдельные обмотки, питаемые от трехфазной сети переменного тока
- Разность фаз 120 и число полюсов 2, 4, 6 или более, в зависимости от требуемой скорости
 Эти прутья образуют клетку, похожую на клетку для белок
Эти прутья образуют клетку, похожую на клетку для белокРазница между синхронным двигателем и асинхронным двигателем ?
- Синхронный двигатель почти точно такой же, как генератор переменного тока
- Асинхронный двигатель не может нормально работать на синхронной скорости. У него есть скольжение.
Что такое защита двигателя переменного тока от перегрузки?
- Магнитное реле перегрузки
- Тепловое реле перегрузки
- Встроенное защитное устройство
Причины перегрева двигателя ?
- Двигатель работает с перегрузкой
- Обрыв одной фазы (одна фаза)
- Дефектные лопасти вентилятора охлаждения
- Выход из строя подшипника
- Плохая вентиляция
- Несоосность
При обрыве фазы двигатель переменного тока работает или нет?
- Когда двигатель работает, двигатель продолжает работать, но возникает перегрузка и перегрев.
- Когда двигатель запускается, двигатель не может работать.
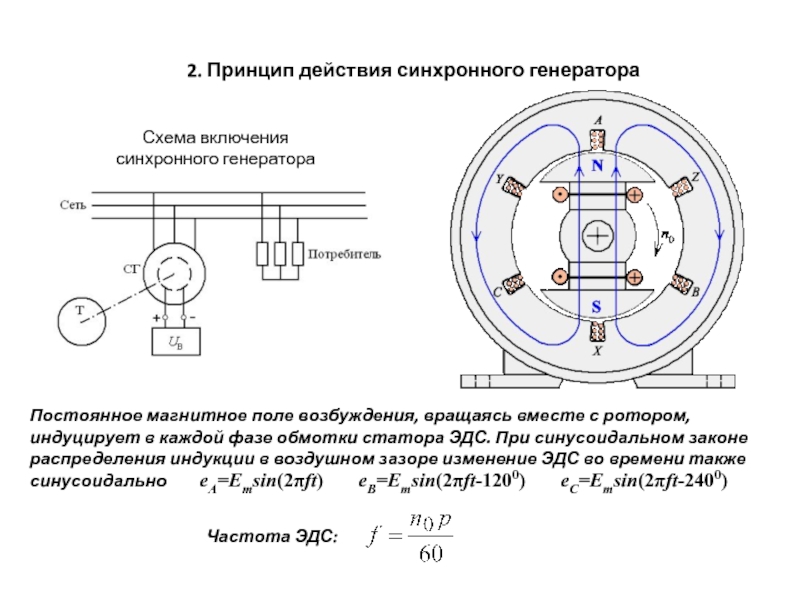
Что такое движущиеся железные инструменты?
- Это прибор, подходящий для измерения напряжения или тока переменного тока, а также напряжения или тока постоянного тока.
Что такое потенциометр?
- Это прибор, который используется для измерения или регулировки разности потенциалов в цепи.
- Этот прибор используется только для измерения постоянного тока и в качестве вольтметра или амперметра.
Что такое статическое электричество?
- Электричество в состоянии покоя, а не в движении
- Электрические заряды могут быть вызваны трением или воздействием атмосферы
Как предотвратить опасность статического электричества в нефтяном танкере?
- Заземляющее устройство, соединение заземления через фланцы на трубопроводе
- Инертный газ
Каковы причины и последствия однофазного двигателя?
- Однофазное подключение происходит, когда одна из трех фазных цепей размыкается, поэтому в остальных цепях протекает избыточный ток.
- Обрыв одной фазы цепи из-за перегоревшего предохранителя, неисправного контактора или обрыва провода.
- Блокирует запуск двигателя, но работающий двигатель может продолжать работать с этой ошибкой.
- При работающем двигателе это может быть обнаружено перегрузкой устройства в линии питания или перегревом.
- Для неработающего двигателя запуск невозможен.
- Из-за однофазности перегрев заглохшего или работающего двигателя приведет к перегоранию перегруженной катушки.
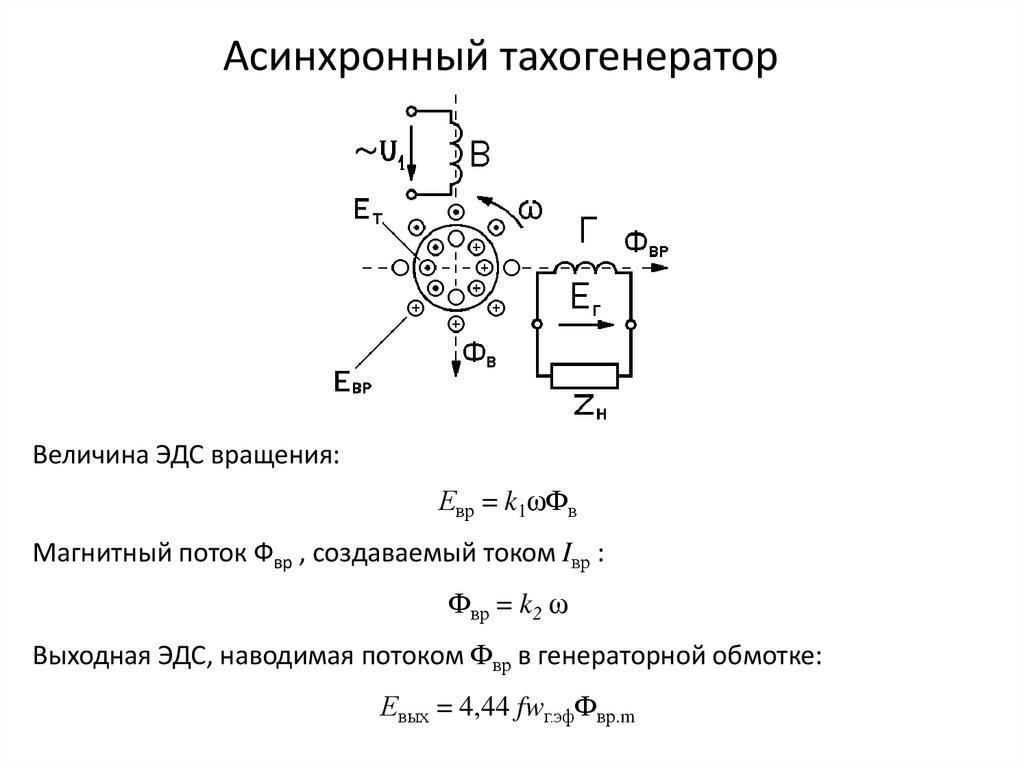
Что такое остаточный магнетизм?
- Магнетизм, остающийся в полях генератора после отключения тока возбуждения.
- Остаточный магнетизм необходим для начальной генерации тока, необходимого для дальнейшего наращивания напряженности шунтирующего поля.
- Генератор может не возбудиться при потере или реверсировании остаточного магнетизма полюса.
Что делать, если генератор не возбуждает?
- Пропустить ток через катушку шунтирующего поля в правильном направлении
- Правильное направление означает, что ток будет правильно намагничивать железный сердечник
- Ток для восстановления можно получить от другого генератора постоянного тока или от аккумулятора.
- Если батарея используется для повторного намагничивания: батарея 12 В подключается [исключительно] через катушку шунтирующего поля при остановленной машине
- Течение тока в правильном направлении всего на несколько секунд установит поле.
- В это время неисправный генератор должен находиться в остановленном состоянии.

Что такое предохранительные устройства лебедки?
- Аварийный останов
- Отключение из-за перегрузки
- Отключение по превышению скорости
- Механический тормоз
- Проскальзывающая муфта при перегрузке для предотвращения любых нежелательных повреждений, таких как повреждение корпуса из-за разрыва якоря и каната.
Что такое проскальзывающее сцепление в лебедке?
- Проскальзывающая муфта обычно устанавливается между первичным двигателем и зубчатой передачей
- Встроен в двигатель, магнитный тормоз и приводной вал
- Установлено проскальзывание примерно при 133 % крутящего момента при полной нагрузке
- Скорость отпускания или опускания контролируется фрикционным тормозом
- Скорость буксировки 0,15 м/с
Почему проскальзывающая муфта установлена на брашпиле?
- В брашпилях не должны применяться чрезмерные усилия к цепному тросу и механизмам
- Без проскальзывающей культуры к кабелю могут быть приложены чрезмерные нагрузки из-за импульса якоря, внезапного препятствия при подъеме или при введении анкера в клюз.
- Предусмотрен также во избежание передачи инерции первичного двигателя на брашпили в случае ударной нагрузки на трос при размещении якоря
- Когда судно стоит на якоре, носовой стопор предотвращает нагрузку на брашпиль

Объясните электрическую тормозную систему в морской технике?
- Когда для опускания или подъема груза используется электрический мотор платформы, используется электрическая тормозная система. Все тормоза являются отказоустойчивыми.
- В случае сбоя питания автоматически срабатывает тормоз, что предотвращает возврат нагрузки. Несколько тормозных колодок [свободно перемещаются] расположены в держателе, который соединен шпонкой с валом двигателя.
- Пластина якоря оказывает давление на тормозные колодки с помощью ряда пружин, чтобы приложить усилие к фрикционной поверхности задней пластины, чтобы предотвратить вращение вала двигателя.
- При подаче питания пластина якоря прикрепляется к магниту, тем самым сбрасывая осевое давление и позволяя валу вращаться
Ссылка:
Устное руководство от – MIN ZAR TAR
Устное руководство MEO по морской электротехнологии, функция 5 – Часть 6Опубликовано в: Морские электрические технологии, Материалы для изучения MEO | Tagged: защита двигателя переменного тока от перегрузки, причины и последствия однофазного двигателя, причины перегрева двигателя, разница между синхронным двигателем и асинхронным двигателем, электрическая тормозная система в морской технике, генератор не возбуждается, асинхронный двигатель, инструменты с подвижной катушкой, движущееся железо инструменты, потенциометр, предотвращение опасности статического электричества в нефтяном танкере, остаточный магнетизм, проскальзывающая муфта в лебедке, асинхронный двигатель с короткозамкнутым ротором, статическое электричество, предохранительные устройства лебедки
Разница между асинхронным двигателем и синхронным двигателем
Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением. Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
- Являются ли синхронные двигатели асинхронными?
- В чем разница между синхронным двигателем и синхронным генератором?
- В чем разница между синхронным и асинхронным генератором?
- Каковы преимущества синхронного двигателя перед асинхронным двигателем?
- Синхронные двигатели переменного или постоянного тока?
- Какие 3 вещи необходимы для работы асинхронного двигателя?
- Каков принцип работы синхронного двигателя?
- Каковы преимущества синхронного двигателя?
- Каков принцип работы синхронного генератора?
- Как запускается асинхронный двигатель?
- Как запускается синхронный двигатель?
- Что такое синхронная скорость?
Являются ли синхронные двигатели асинхронными?
Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. …Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. …Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
В чем разница между синхронным двигателем и синхронным генератором?
Основное различие между ними заключается в условных знаках. Ниже приведены схемы генератора слева и двигателя справа. Каждый подключен к бесконечной шине с напряжением Vt (напряжение и частота бесконечной шины фиксированы независимо от мощности первичного двигателя и возбуждения машины.)
Чем отличается синхронный генератор от асинхронного?
Разница между синхронным генератором и асинхронным генератором. В синхронном генераторе форма волны генерируемого напряжения синхронизирована (прямо соответствует) скорости вращения ротора. …Асинхронный генератор берет реактивную мощность от энергосистемы для возбуждения поля.
Каковы преимущества синхронного двигателя перед асинхронным двигателем?
Преимущество или достоинства:
Одним из основных преимуществ использования синхронного двигателя является возможность управления коэффициентом мощности. Синхронный двигатель с перенапряжением может иметь опережающий коэффициент мощности и может работать параллельно с асинхронными двигателями и другими нагрузками с отстающим коэффициентом мощности, тем самым улучшая коэффициент мощности системы.
Синхронный двигатель с перенапряжением может иметь опережающий коэффициент мощности и может работать параллельно с асинхронными двигателями и другими нагрузками с отстающим коэффициентом мощности, тем самым улучшая коэффициент мощности системы.
Синхронные двигатели переменного или постоянного тока?
Синхронный электродвигатель представляет собой двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. … Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.
Какие 3 вещи необходимы для работы асинхронного двигателя?
Трехфазный асинхронный двигатель состоит из двух основных компонентов, а именно статора и ротора. В этом двигателе неподвижной частью является статор, а вращающейся частью — ротор. В этом двигателе нагрузка подключена к валу. Поверх статора может быть намотана трехфазная обмотка якоря.
Каков принцип работы синхронного двигателя?
Работа синхронных двигателей зависит от взаимодействия магнитного поля статора с магнитным полем ротора. Статор содержит 3-фазные обмотки и питается от 3-фазной сети. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле.
Каковы преимущества синхронного двигателя?
Преимущества синхронного двигателя
- Преимуществом использования синхронного двигателя является возможность управления коэффициентом мощности. …
- Скорость остается постоянной независимо от нагрузки синхронных двигателей. …
- Синхронные двигатели имеют более широкий воздушный зазор, чем асинхронные двигатели, что делает их механически более стабильными.
Каков принцип работы синхронного генератора?
Принцип действия синхронного генератора — электромагнитная индукция. Если существует относительное движение между потоком и проводниками, то в проводниках индуцируется ЭДС.
Как запускается асинхронный двигатель?
При подключении питания к статору трехфазного асинхронного двигателя создается вращающееся магнитное поле, и ротор начинает вращаться, и асинхронный двигатель запускается. В момент пуска скольжение двигателя равно единице, а пусковой ток очень большой.
Как запускается синхронный двигатель?
Двигатель сначала запускается как асинхронный двигатель с контактными кольцами. Сопротивление постепенно отключается по мере того, как двигатель набирает скорость. Когда он достигает скорости, близкой к синхронной, на ротор подается возбуждение постоянного тока, и он приводится в синхронизм. Затем он начинает вращаться как синхронный двигатель.
Что такое синхронная скорость?
: определенная скорость для машины переменного тока, которая зависит от частоты цепи питания, поскольку вращающийся элемент проходит одну пару полюсов при каждом изменении переменного тока.
Синхронный двигатель — Javatpoint
следующий → ← предыдущая Синхронный двигатель — это разновидность двигателя переменного тока. Существует два типа двигателей переменного тока.
Синхронные двигатели Синхронный двигатель относится к двигателю переменного тока, который работает с синхронной скоростью. Синхронный двигатель в основном состоит из двух частей: ротора и статора. Статор — неподвижная часть, а ротор — подвижная часть синхронного двигателя. Синхронный двигатель использует статор, как и асинхронный двигатель, для создания вращающегося магнитного поля (RMF). Ротор синхронного двигателя состоит из катушек с постоянными магнитами, возбуждаемых источником постоянного тока. Когда на статор подается переменный ток, создается вращающееся магнитное поле (RMF). Ротор имеет полюса, имеющие разную полярность. Когда это магнитное поле ротора взаимодействует с ВМП статора из-за разной полярности, ВМП статора и магнитное поле ротора блокируются, поскольку ВМП движется с синхронной скоростью, и ротор начинает вращаться с синхронной скоростью. Поэтому их называют синхронными двигателями или двигателями с постоянной скоростью. Принцип работы синхронного двигателя Синхронный двигатель основан на принципе магнитной блокировки. Запуск синхронного двигателя такой же, как и у асинхронного двигателя, первоначально возбуждаемого трехфазным питанием переменного тока, подаваемым на статор. Если машина достигла максимальной скорости, составляющей 90% от ее скорости, на ротор подается источник постоянного тока. Трехфазный источник подключен к обмотке якоря, и якорь создает вращающееся магнитное поле, которое вращается с синхронной скоростью 120f/P. Где, f = частота и p = количество полюсов Конструкция синхронного двигателяСинхронный двигатель состоит из двух первичных частей; Статор и ротор Статор: Статор — неподвижная часть (неподвижная) синхронной машины. Статор содержит чугунный сердечник, известный как ярмо, обеспечивающее прочность машины. В синхронном двигателе обмотка якоря размещается над статором, который известен как обмотка статора. Сердечник статора изготовлен из листовой стали, что помогает уменьшить потери на вихревые токи. Вентиляционные каналы отведены в корпус машины, выдерживающий высокую температуру. Обмотка пускателя представляет собой трехфазную обмотку, которая возбуждается трехфазным источником переменного тока. Ротор:Ротор — вращающаяся часть (подвижная) синхронной машины. Ротор включает в себя обмотку возбуждения, на которую подается постоянный ток через токосъемные кольца. Ротор делится на два типа, известные как явнополюсные и неявнополюсные. В большинстве синхронных двигателей используется конструкция с явно выраженными полюсами. Явнополюсный ротор: Явнополюсный ротор имеет большой диаметр и короткую осевую длину. Воздушный зазор в роторе с явно выраженными полюсами неравномерен, и полюса выступают наружу на поверхность ротора. Полюса ламинированы кремниевой сталью и несут обмотку возбуждения, а поверхности полюсов обычно снабжены прорезями (обеспечивают опору) для обмотки с короткозамкнутым ротором. Стержни демпфера закорочены с обоих концов медными кольцами. Работа демпферной обмотки в первую очередь обеспечивает пусковой момент и ограничивает колебание (нежелательный шум и вибрацию машины) в синхронном двигателе. Неявнополюсный ротор: Конструкция ротора с неявнополюсными полюсами имеет цилиндрическую форму с параллельными пазами для размещения обмоток ротора.
Преимущества синхронного двигателя
Недостатки синхронного двигателя
Применение синхронного двигателя В эпоху цифровых технологий синхронный двигатель нашел широкое применение в повседневной жизни. Следующая темаГидромеханика MCQ ← предыдущая следующий → |
 Двигатель переменного тока относится к двигателю, который получает питание переменного тока в качестве входного сигнала и преобразует его во вращательное движение (преобразование электрической энергии в механическую). Основное различие между двигателем переменного и постоянного тока заключается в том, что скорость двигателя постоянного тока контролируется его напряжением, тогда как скорость двигателя переменного тока зависит от частоты питания.
Двигатель переменного тока относится к двигателю, который получает питание переменного тока в качестве входного сигнала и преобразует его во вращательное движение (преобразование электрической энергии в механическую). Основное различие между двигателем переменного и постоянного тока заключается в том, что скорость двигателя постоянного тока контролируется его напряжением, тогда как скорость двигателя переменного тока зависит от частоты питания.
 Однажды мы возбуждаем постоянные полюса обмотки возбуждения, создаваемые источником постоянного тока, который пытается притянуть противоположные полюса вращающихся магнитных полюсов. Если магнитные полюса притягиваются и блокируются, ротор продолжает вращаться с синхронной скоростью.
Однажды мы возбуждаем постоянные полюса обмотки возбуждения, создаваемые источником постоянного тока, который пытается притянуть противоположные полюса вращающихся магнитных полюсов. Если магнитные полюса притягиваются и блокируются, ротор продолжает вращаться с синхронной скоростью.
 Прорези соединены последовательно с токосъемными кольцами, которые возбуждаются от источника постоянного тока. Неявный полюс изготовлен из твердого стального материала. Он имеет очень маленький диаметр и очень большую коаксиальную длину с равномерным воздушным зазором.
Прорези соединены последовательно с токосъемными кольцами, которые возбуждаются от источника постоянного тока. Неявный полюс изготовлен из твердого стального материала. Он имеет очень маленький диаметр и очень большую коаксиальную длину с равномерным воздушным зазором. Скорость асинхронного двигателя обратно пропорциональна скорости; если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.
Скорость асинхронного двигателя обратно пропорциональна скорости; если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.
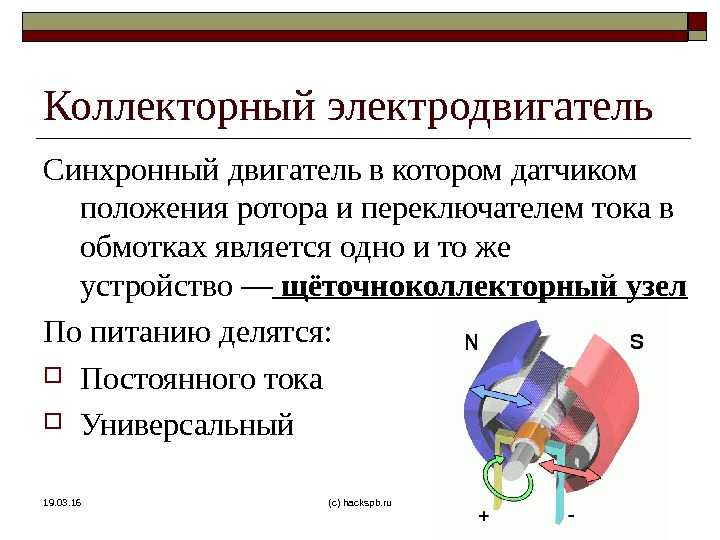 Наиболее распространенное применение синхронного двигателя — это устройства, требующие постоянной скорости, поскольку частота сети регулируется точно в краткосрочной и долгосрочной перспективе, например, цифровые и аналоговые часы, магнитофоны, проигрыватели грампластинок и т. д.
Наиболее распространенное применение синхронного двигателя — это устройства, требующие постоянной скорости, поскольку частота сети регулируется точно в краткосрочной и долгосрочной перспективе, например, цифровые и аналоговые часы, магнитофоны, проигрыватели грампластинок и т. д.Поставщики беспроводных радиочастот и ресурсы
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов RF и Wireless. На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, оптоволокно, микроволновая печь, wimax, wlan, zigbee,
LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т.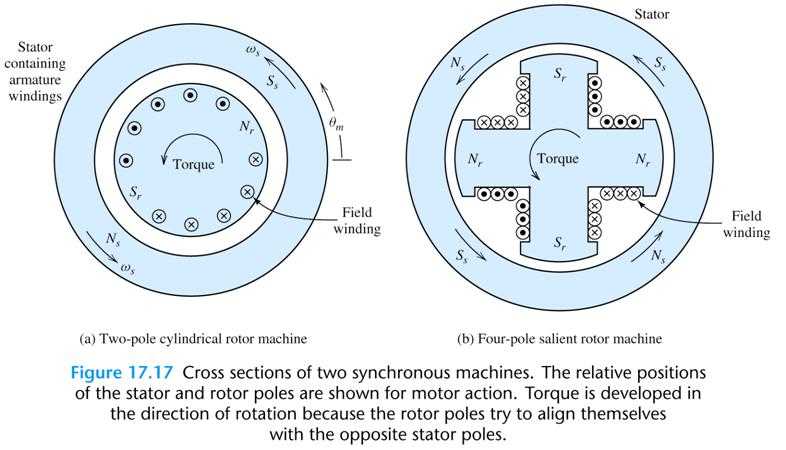 д.
Эти ресурсы основаны на стандартах IEEE и 3GPP. Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
д.
Эти ресурсы основаны на стандартах IEEE и 3GPP. Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
Статьи о системах на основе IoT
Система обнаружения падений для пожилых людей на основе IoT : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падения IoT.
Подробнее➤
См. также другие статьи о системах на основе IoT:
• Система очистки туалетов AirCraft.
• Система измерения удара при столкновении
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной розничной торговли
• Система мониторинга качества воды
• Система интеллектуальной сети
• Умная система освещения на основе Zigbee
• Умная система парковки на базе Zigbee
• Умная система парковки на базе LoRaWAN.
Изделия для беспроводных радиочастот
Этот раздел статей охватывает статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE/3GPP и т. д. , стандарты.
Он также охватывает статьи, связанные с испытаниями и измерениями, посвященные испытаниям на соответствие, используемым для испытаний устройств на соответствие RF/PHY. СМ. УКАЗАТЕЛЬ СТАТЕЙ >>.
д. , стандарты.
Он также охватывает статьи, связанные с испытаниями и измерениями, посвященные испытаниям на соответствие, используемым для испытаний устройств на соответствие RF/PHY. СМ. УКАЗАТЕЛЬ СТАТЕЙ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH была рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Подробнее➤
Основные сведения о повторителях и типы повторителей : В нем объясняются функции различных типов повторителей, используемых в беспроводных технологиях. Подробнее➤
Основы и типы замираний : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные замирания, быстрые замирания и т. д., используемые в беспроводной связи. Подробнее➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона.
Подробнее➤
Архитектура сотового телефона.
Подробнее➤
Основы интерференции и типы интерференции: В этой статье рассматриваются интерференция по соседнему каналу, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. д. Подробнее➤
Раздел 5G NR
В этом разделе рассматриваются функции 5G NR (новое радио), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. д.
5G NR Краткий справочный указатель >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• БАЗОВЫЙ НАБОР 5G NR
• Форматы 5G NR DCI
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Опорные сигналы 5G NR
• 5G NR m-Sequence
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• MAC-уровень 5G NR
• Уровень 5G NR RLC
• Уровень PDCP 5G NR
Руководства по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводным сетям. Он охватывает учебные пособия по таким темам, как
сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS,
GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, беспроводная сеть, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. д.
См. ИНДЕКС УЧЕБНЫХ ПОСОБИЙ >>
Он охватывает учебные пособия по таким темам, как
сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS,
GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, беспроводная сеть, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. д.
См. ИНДЕКС УЧЕБНЫХ ПОСОБИЙ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы, посвященные технологии 5G:
Учебник по основам 5G
Диапазоны частот
учебник по миллиметровым волнам
Рамка волны 5G мм
Зондирование канала миллиметровых волн 5G
4G против 5G
Испытательное оборудование 5G
Архитектура сети 5G
Сетевые интерфейсы 5G NR
звучание канала
Типы каналов
5G FDD против TDD
Нарезка сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G ТФ
В этом учебнике GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM или настройка вызова или процедура включения питания,
Вызов MO, вызов MT, модуляция VAMOS, AMR, MSK, GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Читать дальше.
LTE Tutorial , описывающий архитектуру системы LTE, включая основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он предоставляет ссылку на обзор системы LTE, радиоинтерфейс LTE, терминологию LTE, категории LTE UE, структуру кадра LTE, физический уровень LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, Voice Over LTE, расширенный LTE, Поставщики LTE и LTE vs LTE advanced.➤Подробнее.
РЧ-технологии Материалы
На этой странице мира беспроводных радиочастот описывается пошаговое проектирование преобразователя частоты на примере повышающего преобразователя частоты 70 МГц в диапазон C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
амортизирующие прокладки. ➤Читать дальше.
➤ Проектирование и разработка РЧ приемопередатчика
➤Дизайн радиочастотного фильтра
➤Система VSAT
➤Типы и основы микрополосковых
➤Основы волновода
Секция испытаний и измерений
В этом разделе рассматриваются ресурсы по контролю и измерению, контрольно-измерительное оборудование для тестирования тестируемых устройств на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE. ИНДЕКС испытаний и измерений >>
ИНДЕКС испытаний и измерений >>
➤Система PXI для контрольно-измерительных приборов.
➤ Генерация и анализ сигналов
➤ Измерения физического уровня
➤ Тестирование устройства WiMAX на соответствие
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤ Тест на соответствие TD-SCDMA
Волоконно-оптические технологии
Волоконно-оптический компонент основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д. Эти компоненты используются в оптоволоконной связи.
ИНДЕКС оптических компонентов >>
➤Руководство по оптоволоконной связи
➤APS в SDH
➤Основы SONET
➤ Структура кадра SDH
➤ SONET против SDH
Поставщики беспроводных радиочастотных устройств, производители
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений,
см. ИНДЕКС поставщиков >>.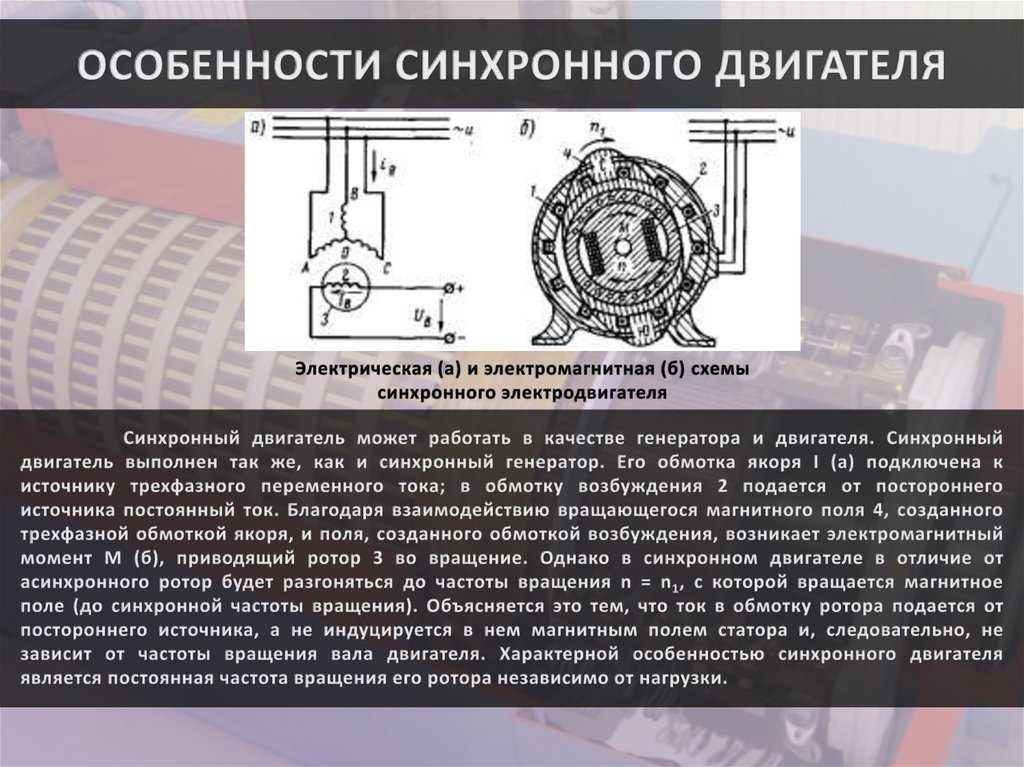
Поставщики ВЧ-компонентов, включая ВЧ-изолятор, ВЧ-циркулятор, ВЧ-смеситель, ВЧ-усилитель, ВЧ-адаптер, ВЧ-разъем, ВЧ-модулятор, ВЧ-трансивер, PLL, VCO, синтезатор, антенну, осциллятор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексер, дуплексер, чип-резистор, чип-конденсатор, чип-индуктор, ответвитель, ЭМС, программное обеспечение RF Design, диэлектрический материал, диод и т. д.
Поставщики радиочастотных компонентов >>
➤Базовая станция LTE
➤ РЧ-циркулятор
➤РЧ-изолятор
➤Кристаллический осциллятор
MATLAB, Labview, Embedded Исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
СМОТРИТЕ ИНДЕКС ИСТОЧНИКОВ КОДА >>
➤ 3–8 код декодера VHDL
➤Скремблер-дескремблер Код MATLAB
➤32-битный код ALU Verilog
➤ T, D, JK, SR триггеры коды labview
*Общая информация о здравоохранении*
Сделайте эти пять простых вещей, чтобы остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: Мойте их часто
2. ЛОКТ: кашляйте в него
3. ЛИЦО: Не прикасайтесь к нему
4. НОГИ: Держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВУЙТЕ: Болен? Оставайтесь дома
Используйте технологию отслеживания контактов >> , следуйте рекомендациям по социальному дистанцированию >> и установить систему наблюдения за данными >> спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таких стран, как США и Китай, чтобы остановить распространение COVID-19так как это заразное заболевание.
Радиочастотные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц измерения.
Они охватывают беспроводные технологии, такие как GSM, UMTS, LTE, 5G NR и т. д.
СМ. КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤ 5G NR ARFCN и преобразование частоты
➤ Калькулятор скорости передачи данных LoRa
➤ LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Yagi
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
В разделе, посвященном IoT, рассматриваются беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth с низким энергопотреблением (BLE), NFC, RFID, INSTEON, X10, KNX, ANT+, Wavenis, Dash7, HomePlug и другие. Он также охватывает датчики IoT, компоненты IoT и компании IoT.
Он также охватывает датчики IoT, компоненты IoT и компании IoT.
См. главную страницу IoT>> и следующие ссылки.
➤РЕЗЬБА
➤EnOcean
➤ Учебник LoRa
➤ Учебник по SIGFOX
➤ WHDI
➤6LoWPAN
➤Зигби RF4CE
➤NFC
➤Лонворкс
➤CEBus
➤УПБ
СВЯЗАННЫЕ ПОСТЫ
Учебники по беспроводным радиочастотам
GSM ТД-СКДМА ваймакс LTE UMTS GPRS CDMA SCADA беспроводная сеть 802.11ac 802.11ad GPS Зигби z-волна Bluetooth СШП Интернет вещей Т&М спутник Антенна РАДАР RFID
Различные типы датчиков
Датчик приближения Датчик присутствия против датчика движения Датчик LVDT и RVDT Датчик положения, смещения и уровня датчик силы и датчик деформации Датчик температуры датчик давления Датчик влажности датчик МЭМС Сенсорный датчик Тактильный датчик Беспроводной датчик Датчик движения Датчик LoRaWAN Световой датчик Ультразвуковой датчик Датчик массового расхода воздуха Инфразвуковой датчик Датчик скорости Датчик дыма Инфракрасный датчик Датчик ЭДС Датчик уровня Активный датчик движения против пассивного датчика движения
Поделиться этой страницей
Перевести эту страницу
СТАТЬИ
Раздел T&M
ТЕРМИНОЛОГИИ
Учебники
Работа и карьера
ПОСТАВЩИКИ
Интернет вещей
Онлайн калькуляторы
исходные коды
ПРИЛОЖЕНИЕ. ЗАМЕТКИ
Всемирный веб-сайт T&M
ЗАМЕТКИ
Всемирный веб-сайт T&M
Преимущества синхронных двигателей
В то время, когда сокращение энергопотребления является приоритетом для конечных пользователей и государственных учреждений, синхронные двигатели прочно закрепились на рынке насосов благодаря своей эффективности. Несмотря на множество преимуществ, не каждая технология синхронного двигателя является правильным выбором для любого применения в насосной технике. В этой статье рассматриваются и сравниваются различные типы синхронных и асинхронных двигателей, а также описываются факторы, которые необходимо учитывать при выборе двигателя.
Синхронные двигатели становятся все более популярными во всем мире. Аналитики ожидают, что эта категория вырастет с 4% до более чем 8% всех насосных двигателей в ближайшие пять лет. Это число может показаться небольшим, но это только начало растущей тенденции.
Популярность этого мотора связана с технологической революцией последних 10 лет, которая снизила стоимость процессорных чипов и, в свою очередь, стоимость системы мотор/привод. Тридцать лет назад, когда в насосной промышленности появились синхронные двигатели, процессоры для управления приводом были дорогими и не обладали многими функциями. Теперь процессоры составляют меньшую часть системы и являются более мощными.
Тридцать лет назад, когда в насосной промышленности появились синхронные двигатели, процессоры для управления приводом были дорогими и не обладали многими функциями. Теперь процессоры составляют меньшую часть системы и являются более мощными.
Использование редкоземельных магнитов также увеличивает стоимость, и цены на магниты сильно колеблются в зависимости от доступных поставок (большинство из них поступает из Китая). К счастью, многие производители в настоящее время предлагают синхронные двигатели без магнитов или с магнитами, полученными не из редкоземельных элементов, что делает двигатели более доступными.
Что такое синхронный двигатель?
В синхронном двигателе ротор вращается с той же скоростью (синхронно) с вращающимся магнитным полем статора. В отличие от асинхронного двигателя, который использует проскальзывание ротора для индукции тока в ротор для создания крутящего момента, в синхронных двигателях нет наведенного тока и последующих потерь ротора. Снижение потерь означает более высокую эффективность машин. Преимущества:
В отличие от асинхронного двигателя, который использует проскальзывание ротора для индукции тока в ротор для создания крутящего момента, в синхронных двигателях нет наведенного тока и последующих потерь ротора. Снижение потерь означает более высокую эффективность машин. Преимущества:
- высокая эффективность
- без потерь ротора
- более низкая температура подшипника
- менее частое обслуживание подшипников
- Производительность частотно-регулируемого привода (VFD) (особенно на низких скоростях)
Понятно, что при работе с приводом с регулируемой скоростью и регулировке рабочей скорости в соответствии с требованиями приложения есть преимущества в энергопотреблении.
Конструкции на синхронной основе получают наибольший выигрыш в эффективности при работе с частотно-регулируемым приводом. В асинхронном двигателе с частотно-регулируемым приводом потери ротора составляют более высокую долю общих потерь при работе с низкой нагрузкой по сравнению с работой при полной нагрузке и скорости.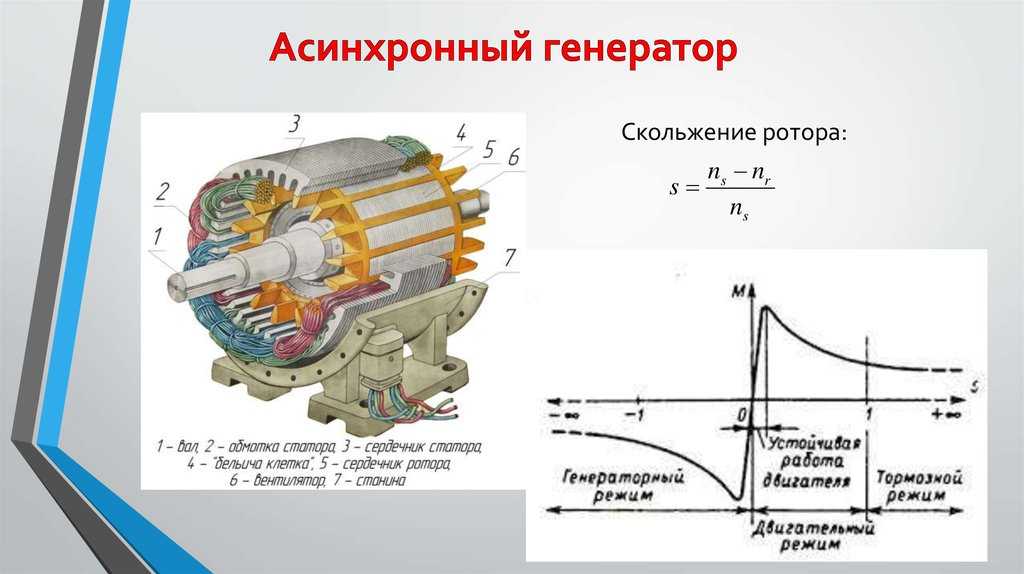 По мере снижения нагрузки пользователи видят сравнительно лучшую производительность синхронных двигателей в результате устранения этих потерь (Рисунок 2).
По мере снижения нагрузки пользователи видят сравнительно лучшую производительность синхронных двигателей в результате устранения этих потерь (Рисунок 2).
Более плоская кривая КПД означает, что реализованные преимущества превысят дифференциал повышения пиковой эффективности IE4 или IE5. Учитывая, что до 75 % рабочего времени обычно тратится на скорость ниже 90 % от полной скорости, влияние оказывается значительным. Например, в системах отопления, вентиляции и кондиционирования воздуха (HVAC) при полной нагрузке синхронный двигатель, интегрированный с ЧРП, обеспечивает увеличение эффективности на 3-6% по сравнению с асинхронным двигателем на полной скорости с ЧРП. Тем не менее, при мощности 25 % пользователи по-прежнему достигают 44 % производительности насоса, но с повышением эффективности на 8–12 %. Таким образом, при работе с частичной нагрузкой синхронные двигатели обеспечивают более высокий КПД.
Разновидности синхронных двигателей
В настоящее время доступно несколько типов синхронных двигателей, и кажется, что все они имеют собственное сокращение. Вот наиболее распространенные термины, которые нужно знать.
Вот наиболее распространенные термины, которые нужно знать.
Двигатель с электронной коммутацией (ECM)
При обсуждении насосных применений ECM относится к двигателю со встроенными приводами и органами управления. ECM обычно используются в системах HVAC.
Бесщеточные с постоянными магнитами (BPM)
Они могут называться постоянными магнитами переменного тока (PMAC) или бесщеточными постоянными магнитами (BLDC). Постоянные магниты монтируются на поверхности или внутри. В последнем используются только редкоземельные металлы, тогда как в первом могут использоваться магниты на основе феррита или редкоземельных элементов. Низкая механическая прочность и ограниченная скоростная способность являются недостатками ПМ поверхностного монтажа. Преимуществом является возможность легкого изменения скорости.
Гибридный синхронный реактивный двигатель (HSM) с постоянными магнитами
HSM используют магниты меньшей силы, которые насыщают ротор и улучшают коэффициент мощности.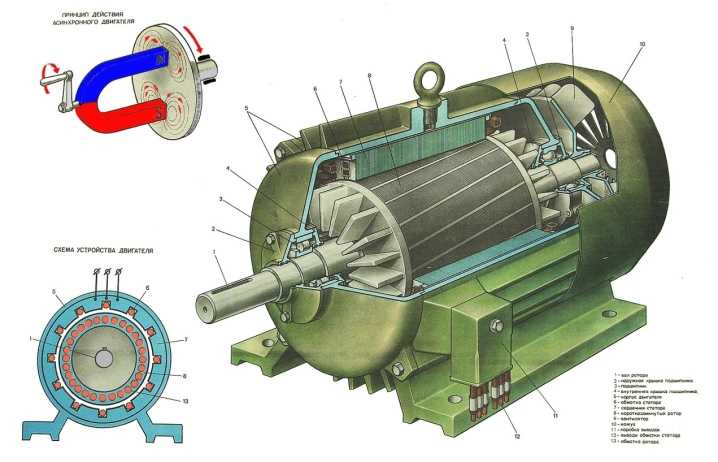 Доля реактивного момента значительна по сравнению с PMAC.
Доля реактивного момента значительна по сравнению с PMAC.
Синхронный реактивный двигатель (SynRM)
SynRM работает на основе концепции «магнитного сопротивления», но не требует магнитов для создания магнитного поля. Ротор состоит из стальных пластин, вырезанных для использования в качестве магнитных полюсов. Прочная конструкция обычно требует большего тока для частотно-регулируемого привода и имеет более низкий коэффициент мощности по сравнению с конструкциями с постоянными магнитами.
Синхронный реактивный двигатель с алюминиевой клеткой (SynRA)
SynRA предлагает дополнительное преимущество работы на стандартном частотно-регулируемом приводе вольт/герц (Гц) и может быть простой заменой существующему асинхронному двигателю.
Реактивный реактивный двигатель (SRM)
SRM появился раньше, чем асинхронные двигатели постоянного и переменного тока. Проблемы с управлением делают его непригодным для многих приложений. Он имеет простую конструкцию, но сложную электрическую схему. Для управления большинством приложений требуются специальные датчики положения и механизмы синхронизации.
Для управления большинством приложений требуются специальные датчики положения и механизмы синхронизации.
Выбор синхронного двигателя также означает выбор частотно-регулируемого привода, а выбор частотно-регулируемого привода зависит от различных синхронных технологий. Таким образом, важно понимать от производителя различные ожидаемые результаты.
При выборе индукционной или синхронной технологии взгляните на общий вид. Это «системосознательное» решение требует общего взгляда на цели системы. Если скорость двигателя должна постоянно поддерживаться на уровне 100 %, хорошим выбором будет асинхронный двигатель.
Потенциальный недостаток синхронных двигателей по сравнению с асинхронными двигателями заключается в том, что в приложениях с нестабильными насосными нагрузками могут возникать дрожания, что в конечном итоге приводит к отключению двигателя. Чтобы предотвратить эту проблему, синхронный двигатель и система привода должны включать в себя резистор для ЧРП.
Что касается тепловых характеристик, синхронная машина будет иметь сравнительно более холодный ротор, чем асинхронная. Это связано с улучшенной плотностью мощности и возможностью создания данного номинала в меньшем корпусе с менее активным электрическим материалом, а также с более высокой эффективностью.
Это связано с улучшенной плотностью мощности и возможностью создания данного номинала в меньшем корпусе с менее активным электрическим материалом, а также с более высокой эффективностью.
Пониженная температура ротора также повышает надежность и техническое обслуживание. Поскольку к подшипникам передается меньше тепла, а снижение температуры всего на 50 F (10 C) удваивает срок службы смазки, пользователи могут ожидать, что синхронная машина будет более надежной, чем индукционная.
Стандарты Министерства энергетики США
Министерство энергетики США (DOE) заинтересовано в технологии синхронных двигателей и рассматривает возможность установления для них стандартов испытаний. Текущий индекс энергии насоса (PEI) не показывает разницы в эффективности синхронных и асинхронных двигателей, но Министерство энергетики при участии Гидравлического института (HI) предложило создать коэффициенты, демонстрирующие разницу между синхронными и асинхронными машинами. Это позволит конечным пользователям легко сравнивать то, что поставщики насосов говорят об эффективности их двигателей и приводов.
Со стандартными асинхронными двигателями может быть трудно и непомерно дорого превысить IE3 (премиум NEMA) для достижения желаемого уровня эффективности IE4 или IE5, особенно для меньшей номинальной мощности менее 75 киловатт (кВт). Синхронные двигатели, с другой стороны, обеспечивают повышение энергоэффективности в отрасли, а новейшие и наиболее высокоэффективные двигатели и приводы с регулируемой скоростью легко доступны на рынке.
Насосное оборудование
Сегодня синхронная технология произвела фурор в насосах для бассейнов, заняв значительную долю отрасли. Законодательство побуждает производителей становиться более комплексными в своих энергоэффективных предложениях. В частности, для достижения уровня эффективности в Калифорнии теперь требуется использование синхронной технологии в насосах для бассейнов и спа, что заставляет производителей стандартизировать синхронную технологию по всем направлениям.
Для циркуляционных насосов (используемых в жилых и коммерческих системах отопления, вентиляции и кондиционирования) преобладают синхронные двигатели.