
Чем асинхронные электродвигатели отличаются от синхронных
Самые распространённые электродвигатели — трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка».
 В машинах с фазным ротором вместо стержней намотаны обмотки.
В машинах с фазным ротором вместо стержней намотаны обмотки.
 В машинах с фазным ротором вместо стержней намотаны обмотки.
В машинах с фазным ротором вместо стержней намотаны обмотки.В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке.
Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
 После начала вращения, обороты увеличиваются.
После начала вращения, обороты увеличиваются.Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
 Этот способ применяется в механизмах с регулировкой скорости.
Этот способ применяется в механизмах с регулировкой скорости.Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
- Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
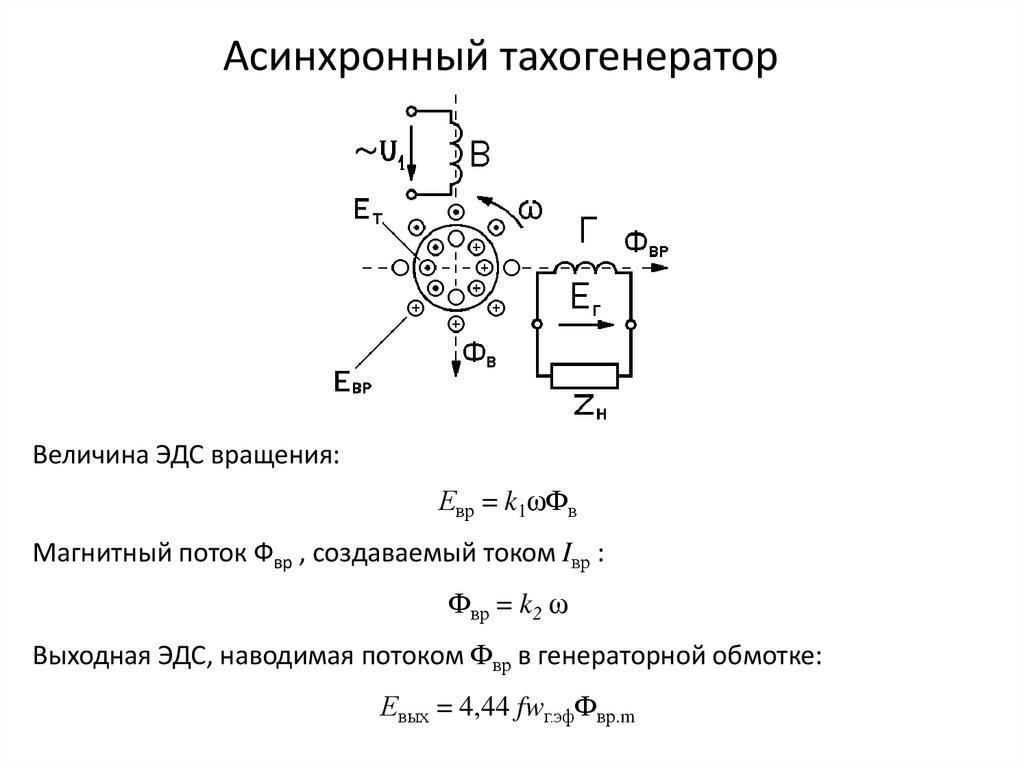
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Ф
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф
Магнитные потоки Ф
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4. 4)
4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока

Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.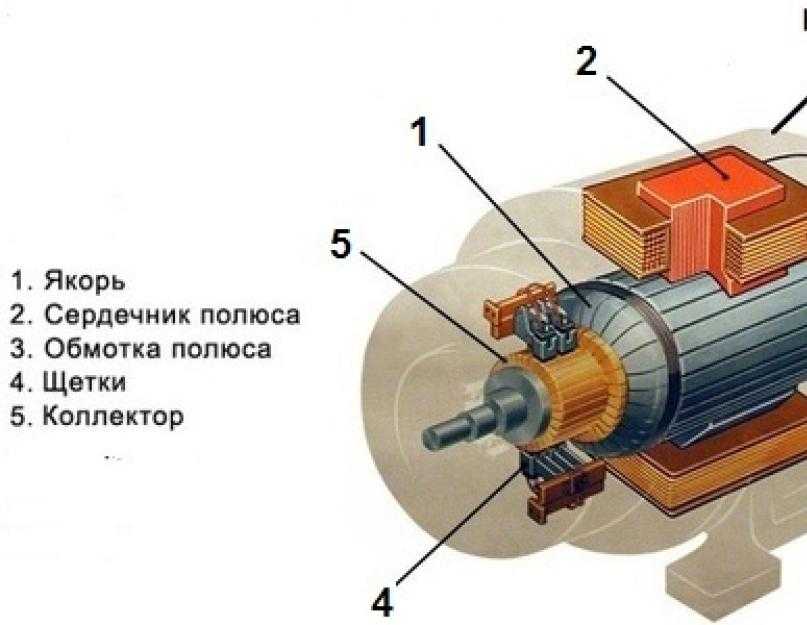
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т. п.
п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Разница между асинхронным двигателем и синхронным двигателем
Разница между асинхронным двигателем и синхронным двигателем объясняется с помощью различных факторов, таких как тип возбуждения, используемый для машины. Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование, области применения и частота.
Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование, области применения и частота.
| ОСНОВА РАЗНИЦЫ | СИНХРОННЫЙ ДВИГАТЕЛЬ | АИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Тип возбуждения | Синхронный двигатель представляет собой машину с двойным возбуждением. | Асинхронный двигатель представляет собой машину с одним возбуждением. |
| Система питания | Обмотка якоря питается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Его статорная обмотка питается от источника переменного тока. |
| Скорость | Всегда работает на синхронной скорости. Скорость не зависит от нагрузки. | При увеличении нагрузки скорость асинхронного двигателя уменьшается. Она всегда меньше синхронной скорости. |
| Запуск | Самозапуск невозможен. Прежде чем синхронизировать его с источником переменного тока, его необходимо любым способом довести до синхронной скорости. | Асинхронный двигатель имеет момент самозапуска. |
| Эксплуатация | Синхронный двигатель может работать с отстающей и опережающей мощностью путем изменения его возбуждения. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. |
| Применение | Может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| Эффективность | Он более эффективен, чем асинхронный двигатель с такой же мощностью и номинальным напряжением. | КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Стоимость | Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения | Асинхронный двигатель дешевле, чем синхронный двигатель той же мощности и номинального напряжения. |
Асинхронный двигатель также известен как Асинхронный двигатель . Он так называется, потому что никогда не работает на синхронной скорости. т. е. N с = 120f/P . Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда следует синхронной скорости. Скорость ротора поддерживается или синхронизируется с током питания.
- Трехфазный синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.
- Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
- Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная. Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.
- Асинхронный двигатель имеет момент самозапуска, тогда как синхронный двигатель не запускается самостоятельно. Прежде чем синхронизировать его с источником переменного тока, его необходимо любым способом довести до синхронной скорости.
- Синхронный двигатель может работать с отстающей и опережающей мощностью путем изменения его возбуждения. Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности асинхронного двигателя становится очень низким.
- Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок.
- Синхронный двигатель более эффективен, чем асинхронный двигатель с такой же мощностью и номинальным напряжением.
- Синхронный двигатель дороже, чем асинхронный двигатель с такой же мощностью и номинальным напряжением.
 Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.
Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.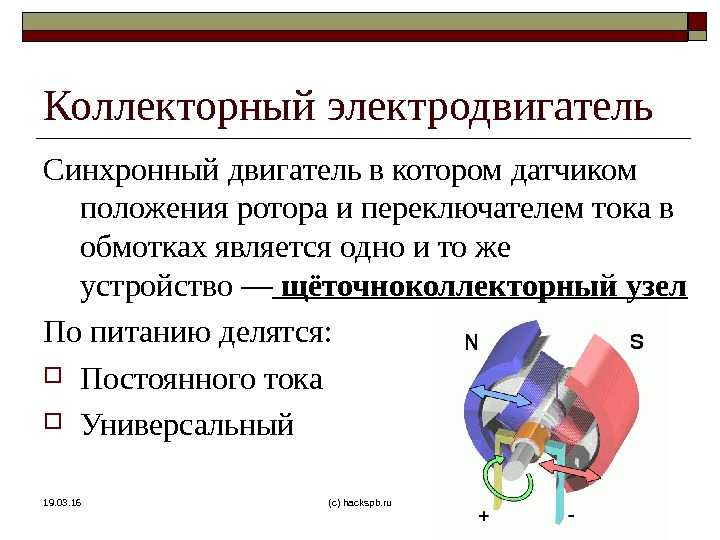
Следовательно, асинхронный двигатель отличается от синхронного двигателя.
Разница между асинхронным двигателем и синхронным двигателем
от Electricalvoice
Двигатели переменного тока в основном бывают двух типов, один из них синхронный двигатель , а другой асинхронный двигатель . Асинхронный двигатель также известен как асинхронный двигатель . Оба двигателя являются широко используемыми электродвигателями. Здесь мы объясним разницу между асинхронным двигателем и синхронным двигателем с помощью некоторых основных факторов, таких как тип возбуждения, используемый для их работы, скорость двигателя, запуск и работа, общий КПД обоих двигателей, его стоимость эксплуатации, использования, приложений и частоты их работы.
Разница между асинхронным двигателем и синхронным двигателем в табличной форме
Сравнение трехфазного асинхронного двигателя и трехфазного синхронного двигателя представлено в следующей таблице.
| Асинхронный двигатель | Синхронный двигатель |
| Асинхронный двигатель с автоматическим запуском. Потому что у него высокий пусковой момент. | Самозапуск невозможен. Для его работы его необходимо любым способом разогнать до синхронной скорости. |
| Асинхронный двигатель всегда работает ниже синхронной скорости (N s ), т.е. | Синхронный двигатель всегда работает на синхронной скорости (N с ) |
| При увеличении нагрузки скорость асинхронного двигателя уменьшается. | Скорость не зависит от нагрузки. |
| Асинхронный двигатель представляет собой машину с одним возбуждением. | Синхронный двигатель представляет собой машину с двойным возбуждением. |
| Асинхронный двигатель работает только с отстающим коэффициентом мощности. | Синхронный двигатель может работать с отстающим и опережающим коэффициентами мощности. |
| Обмотка статора питается от источника переменного тока. | Его обмотка возбуждения питается от источника постоянного тока, а его обмотка якоря питается от источника переменного тока. |
| КПД ниже, чем у синхронного двигателя | Эффективнее асинхронного двигателя |
| Асинхронный двигатель дешевле синхронного. | Синхронный двигатель дороже асинхронного двигателя. |
| Асинхронный двигатель является наиболее широко используемым двигателем для всех бытовых и коммерческих целей. | Синхронный двигатель можно использовать для коррекции коэффициента мощности, а также для передачи крутящего момента для привода механических нагрузок. |
Что такое асинхронный двигатель?
Асинхронный двигатель представляет собой машину переменного тока с однократным возбуждением. Его статорная обмотка напрямую связана с источником переменного тока, тогда как его обмотка ротора получает энергию от статора посредством индукции. Он также известен как асинхронный двигатель, потому что он никогда не работает с синхронной скоростью (N s ) т. е.
Он также известен как асинхронный двигатель, потому что он никогда не работает с синхронной скоростью (N s ) т. е.
Типы роторов асинхронных двигателей
1. Ротор с короткозамкнутым ротором
- Состоят из цилиндрического многослойного сердечника с прорезями, почти параллельными оси вала или скошенными.
- Каждый слот содержит неизолированный стержневой проводник из алюминия или меди.
- На каждом конце ротора проводники стержней ротора закорочены толстыми концевыми кольцами из того же материала.
2. Ротор с обмоткой или ротор с контактными кольцами
- Состоит из щелевой арматуры.
- Изолированные жилы укладываются в пазы и соединяются в виде трехфазной двухслойной распределенной обмотки, аналогичной обмотке статора.
- Открытые концы звездообразной цепи выведены за пределы ротора и соединены с 3 изолированными контактными кольцами.
Что такое синхронный двигатель?
Синхронный двигатель представляет собой машину переменного тока с двойным возбуждением, поскольку его обмотка возбуждения питается от источника постоянного тока, а обмотка якоря подключена к источнику переменного тока. Он вращается со скоростью вращающегося поля, т. е. с синхронной скоростью (N с ).
Он вращается со скоростью вращающегося поля, т. е. с синхронной скоростью (N с ).
В синхронных машинах обмотки всегда соединены в звезду, обмотка якоря размещена в статоре, а обмотка возбуждения в роторе.
Основные различия между трехфазным асинхронным двигателем и синхронным двигателем
Трехфазный синхронный двигатель
- Синхронный двигатель работает с постоянной скоростью, т. е. с синхронной скоростью
- Синхронному двигателю требуется возбуждение постоянного тока на его ротор.
- Самозапуск невозможен.
- Коэффициент мощности можно изменить с отстающего на опережающий и наоборот.
- Скорость синхронного двигателя постоянна при всех нагрузках.
- Синхронный двигатель вращается из-за магнитной блокировки между полюсами ротора и полюсами статора.
- Синхронный двигатель стоит дорого и требует регулярного обслуживания.
Трехфазный асинхронный двигатель
- Асинхронный двигатель всегда работает со скоростью ниже синхронной.
