Датчик Холла для Arduino купити в Україні
Датчик Холу / Troyka-модуль
Сенсор Холу зафіксує факт наближення магніту і визначить його полюс. А ще датчик виконає роль тахометра, сенсора відкриття дверей або знайде положення вала при управлінні безколекторним двигуном. А з двох датчиків Холла можна зібрати енкодер.
Відеоогляд
Загальні відомості
Датчик магнітного поля заснований на ефекті Холу, суть якого в наступному: якщо провідник зі струмом, вміщений в магнітне поле, на його краях виникає ЕРС, спрямована перпендикулярно до напрямку струму і напрямку магнітного поля.
Особливості
- Форм-фактор Troyka — практичне рішення для початківців та досвідчених мейкерів.
- Модуль виконаний на чіпі сенсора магнітного поля SS49E.
- Датчик зафіксує факт наближення магніту і визначить його полюс. А ще сенсор виконає роль тахометра, датчика відкриття дверей або знайде положення вала при управлінні безколекторним двигуном.

- Можливість зібрати енкодер при додаванні другого датчика Холла.

Підключення
Датчик магнітного поля підключається до електроніці через групу з трьох контактів.
| Контакт | Функція | Підключення |
|---|---|---|
| S | Вихідний сигнал сенсора | Підключіть до піну вводу-виводу мікроконтролера з підтримкою АЦП. |
| V | Харчування | Підключіть до живлення мікроконтролера. |
| G | Земля | Підключіть до землі мікроконтролера. |
При підключенні до платформах форм-фактору Arduino R3 рекомендуємо використовувати Troyka Shield або Troyka Slot Shield. А для комп’ютерів Raspberry Pi передбачений Troyka HAT. Також модуль фізично сумісний з breadboard’ом.
Програмування
Датчик спілкується з мікроконтролером через аналоговий сигнал. У відсутності магнітного поля датчик видає половину напруги живлення. При появі магнітного поля значення відхиляється до напруги живлення або нулю, в залежності від полярності магнітного поля пропорційна його інтенсивності.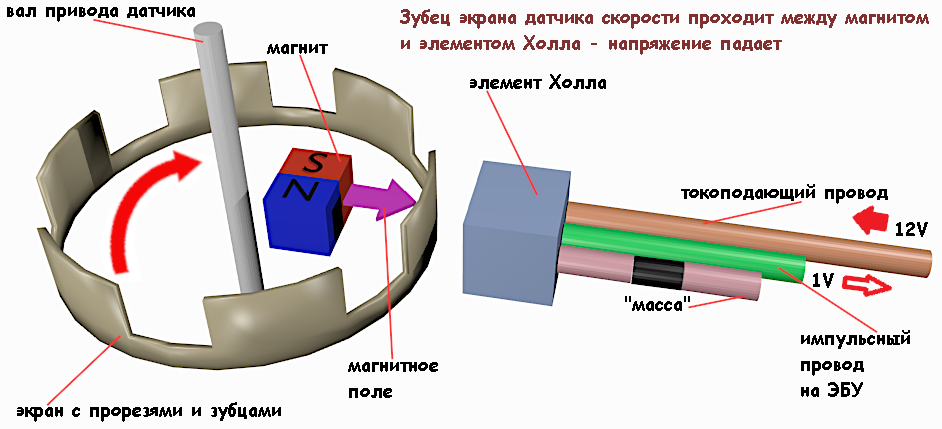 Для програмної роботи з сенсором використовуйте функції та бібліотеки, які полегшують складання коду програми.
Для програмної роботи з сенсором використовуйте функції та бібліотеки, які полегшують складання коду програми.
- Функція для Arduino
- Функція для Espruino
Якщо ви новачок у програмуванні мікроконтролерів, зверніть увагу на освітні набори Матрьошка і Йодо.
Комплектація
- 1× Плата-модуль
- 1× Трипровідною шлейф
Характеристики
- Модель: Датчик Холла / Troyka-модуль / AMP-B006
- Чіп: SS49
- Вхідна напруга живлення Vcc: 3,3–5 В
- Споживаний струм Icc: до 5 мкА
- Апаратний інтерфейс: Troyka-контакти S-V-G
- Програмний інтерфейс: аналоговий сигнал
- Вихідна напруга: 0–Vcc В
- Розміри: 25,4×25,4 мм
Ресурси
- Що таке Troyka-модулі
- Datasheet на чіп SS49E
N3xxC, датчики холла
Цилиндрический датчик Совместим с установочными местами датчиков фирмы Braun. Максимальная рабочая температура до +125°C.
Совместим с установочными местами датчиков фирмы Braun. Максимальная рабочая температура до +125°C.
Датчики состоят из измерительной части (чувствительного магнитного элемента) в корпусес внешней резьбой и соединительного кабеля. Подключение датчиков осуществляется при помощи кабельных наконечников или герметичного разъёма установленных на соединительный кабель (в зависимостиот варианта исполнения).
Выходной сигнал датчика — импульсы напряжения прямоугольной формы и постоянной амплитуды с частотой следования профилей зубьев контрольной поверхности.
Датчик не чувствителенк радиальнымбиениям вала.
Импортозамещение:Таблица замен датчиков типа A5S фирмы Braun на N3xxC
| Braun | Вибробит | Особенности Вибробит1) |
| A5S0DS0M1210B80 | N321с-090–00.3STMH | Корпус 90 мм, М12×1, кабель 30 см (разъем). |
| A5S05B90-06 | N341с-90–00. 3STMH 3STMH | Корпус 90 мм, М14×1,5, кабель 30 см (разъем). |
| A5S08T48A2) | N342с-50–00.3STMH | Корпус 50 мм, М16×1, кабель 30 см (разъем). |
| A5S09T48 A5S0DD0M2210B48 | N344с-50–00.3STMH | Корпус 50 мм, М22×1, кабель 30 см (разъем). |
| A5S09T94 A5S0DS0M2210В94 | N344с-90–00.3STMH | Корпус 90 мм, М22×1, кабель 30 см (разъем). |
| 1) — Для подключения – кабель удлинительный КУ4/КУ5 (длина от 3 до12 м, кабельные наконечники). 2) — Корпус М18×1 | ||
Характеристики
| Параметр | Значение |
|---|---|
| Измеряемая величина | частота вращения |
| Диапазон измеряемых частот вращения, Гц | 0…20000 |
| Диапазон измеряемых частот вращения с нормированными метрологическим характеристиками, Гц | 0,5…17000 |
| Пределы допускаемой относительной погрешности измерения частоты вращения, % | ±0,1 |
| Тип выходного сигнала | импульсный сигнал напряжения пропорциональный частоте вращения |
| Тип контрольной поверхности вала | шестерня, паз, шпонка 1) |
| Установочный (начальный) зазор, мм | 0,5…2,5 2) |
| Габаритные размеры контрольной поверхности | см. раздел применение раздел применение |
| Диапазон рабочих температур, °С: — чувствительного элемента — внешнего электронного узла | -40…+125 3) — |
| Диапазон выходных сигналов: — нижняя граница (низкий уровень) — верхняя граница (высокий уровень) | 0…2,5 В от (Uп — 2,5 В) В до (Uп) В 4) |
| Диапазон напряжений питания (Uп), В | +10…+30 |
| Ток потребления, мА, не более | 20 |
| Максимальный рабочий выходной ток, мА | 20 |
| Ограничение тока по выходному сигналу, не более, мА — вытекающий — втекающий | 40 100 |
| Защита от короткого замыкания по выходу напряжения, сек | не более 10 |
| Схема подключения (количество линий) | трехпроводная |
| Материал корпуса по ГОСТ 5949 | сталь 5) |
| Степень защиты корпуса по ГОСТ 14254 | IP67 |
| Диапазон длин кабеля датчика, м | 0,3…10,0 |
1) Материал контрольной поверхности — ферромагнитная сталь.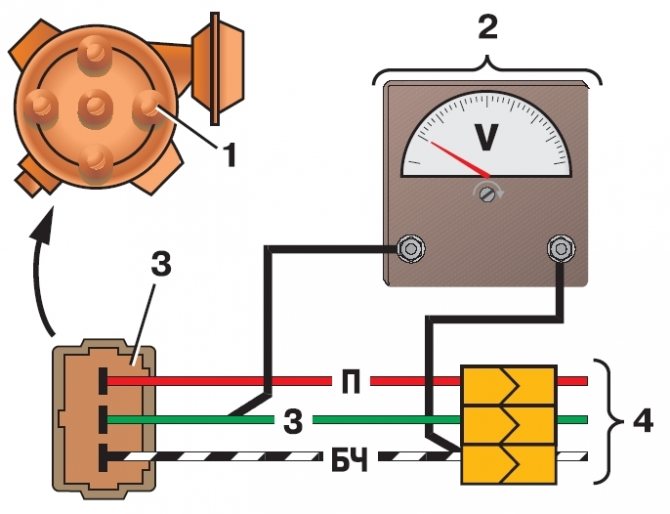 2) Оптимальное значение установочного зазора выбирается в зависитот размеров контрольной поверхности и ее формы(см. раздел Применение). 3) Максимальная температура электрического разъема датчика (для исполнений с кодом «ST») не более +85°С. 4)Uп — уровень напряжения питания датчика; Значения напряжений указаны при выходном токе не более10 мА. 5) Сталь марки 12×18Н10Т или сталь близкая по составу и свойствам. Возможно изготовление датчиков из других металлов и сплавов по требованию заказчика. | |
Габаритные размеры
Электрическая схема соединения
Применение
Измерение частоты вращения и фазы на вспомогательном оборудовании с температурой окружающей среды не более +125° C. Датчики могут использоваться как самостоятельно, для измерения частоты вращения, так и в составе измерительной системы АСУ ТП.
Значения установочного зазора в зависимостиот размеров контрольной поверхности
Обозначения размеров контрольной поверхности приведено на рисунке ниже:
1. Для контрольной поверхности паз: соотношения размеров контрольной поверхности и рекомендованных зазоров установки датчика:
Для контрольной поверхности паз: соотношения размеров контрольной поверхности и рекомендованных зазоров установки датчика:
| Ширина (W), мм | Глубина (D), мм | Толщина (T), мм | Диапазон установочного зазора, мм |
| не менее 3 | не менее 3 | не менее 5 | от 0,5 до 1,50 |
| не менее 4 | не менее 4 | не менее 6 | от 0,8 до 2,00 |
| не менее 5 | не менее 5 | не менее 7 | от 1 до 2,50 |
2. Для контрольной поверхности шестерня: при количестве пазов (или зубьев) более одного, при выборе установочного зазора датчика так же требуется учитывать модуль зубчатого колеса (M):
| Модуль зубчатого колеса (М),*) | Ширина (W), мм | Диапазон установочного зазора, мм |
| от 1 до 1,5 | не менее 3 | не более 0,80 |
| от 1,5 до 2 | не менее 3 | не более 1,50 |
| от 2 до 4 | не менее 3 | не более 2,00 |
| свыше 4 | не менее 3 | не более 2,50 |
*) Модуль зубчатого колеса (М) определяется как отношение внешнего диаметра колеса, в миллиметрах,к количеству пазов (зубьев) по формуле M = Di / N, где Di — внешний диаметр шестерни (вращающегося профиля), N – количеством пазов (или зубов) шестерни. | ||
Информация для заказа
Пример записи при заказе:
Датчик частоты вращения N342с-50–00.3STMH
Расшифровка записи: датчик частоты вращения магнитный (Холла) с выходным импульсным сигналом напряжения 0 (2,5)…Uп (Uп-2,5) В, с размером внешней резьбы М16×1, предназначенный для измерения частоты вращения в диапазоне 0…17000 Гц при установочных зазорах от 0,5 до 2,5 мм. Диапазон эксплуатационных температур −40…+125° C. Кабель датчика 0,3 м в металлорукаве с разъемом типа ST1210/S6 на конце.
Маркировка исполнения:
Таблица выбора вариантов исполнения:
| Номер параметра | Наименование параметра | Возможные значения | Расшифровка |
| 1 | тип измеряемого параметра | N | частота вращения |
| 2 | тип датчика, выхода | 3 | магнитный, выходной импульсный сигнал напряжения 0 (2,5)…Uп (Uп-2,5) В, где Uп=+10…+30 В |
| 3 | размер внешней резьбы | 21 41 42 44 45 | резьба М12×1 резьба М14×1,5 резьба М16×1 резьба М22×1 резьба М20×1 |
| 4 | температурное исполнение | С | -40…+125 °С |
| 5 | длина датчика | 50 | длина датчика 50 мм |
| 90 | длина датчика 90 мм | ||
| 6 | длина кабеля | 00,3 | 0,3 м |
| 03,0 | 3,0 м | ||
| 05,0 | 5,0 м | ||
| 07,0 | 7,0 м | ||
| 10,0 | 10,0 м | ||
| 7 | тип разъема | ST | ST1210/S6 |
| кабельные наконечники | |||
| 8 | тип защиты кабеля | НС | оплетка из нержавеющей стали |
| MH | металлорукав | ||
| Примечания: | |||
1. Цветовое кодирование параметров Цветовое кодирование параметров | |||
| параметры без возможности выбора | синий шрифт | ||
| параметры, определяющие исполнение при заказе | серый шрифт | ||
| 2. Выбор исполнения (рекомендации) | |||
| Рекомендуется для всех исполнений по размеру резьбы и по длине корпуса применять только вариант с кабелем длиной 0,3 м и разъемом типа ST1210/S6, с защитой кабеля металлорукавом. Подключение датчиков выполнять кабелем удлинительным КУ4 или КУ5. | |||
Аксессуары
- Коробка соединительная КС-4У;
- Кабель удлинительный КУ4;
- Кабель удлинительный КУ5;
- Стойки М10×1, М16×1;
- Проходники М20, М24;
- Держатели разъемов ДР-2, ДР-3.
- Приспособление СП51
Загрузки
Техническая документация
ВШПА.421412.100.130 РЭ. Датчики частоты вращения «Вибробит N100». Руководство по эксплуатации
ВШПА.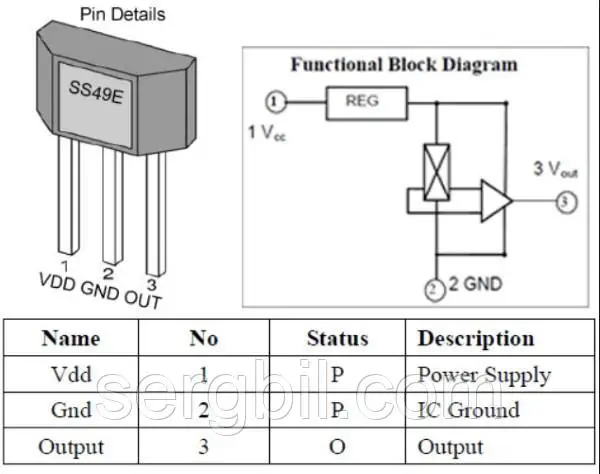 421412.100.130 ТУ Датчики частоты вращения «Вибробит N100». Технические условия
421412.100.130 ТУ Датчики частоты вращения «Вибробит N100». Технические условия
Как подключить датчики Холла к SOLO для управления скоростью или крутящим моментом бесщеточного двигателя
ШАГ 2. Найдите правильное подключение проводов двигателя к SOLO При использовании датчиков Холла порядок подключения вашего двигателя к выходам SOLO становится важным, в то время как в бездатчиковом режиме порядок подключения двигателя не важен.
По этой причине вам необходимо убедиться, что 3 провода, выходящие из вашего двигателя, хорошо подключены к SOLO, в целом будет 6 комбинаций, которые вы можете подключить провода вашего 3-фазного двигателя к выходу SOLO A. ,B и C, хотя из этих 6 комбинаций только две или, в некоторых случаях, одна из них будут работать безупречно в обоих направлениях для скорости / крутящего момента, шаги для поиска правильной проводки двигателя будут следующими:
1. Произвольным образом подключите 3 провода вашего двигателя к выходам SOLO ABC Motor и запишите комбинацию в таблицу, аналогичную таблице 2 ниже, где мы представляем, что у двигателя есть 3 провода с красным, синим и черным. цвета.
цвета.
2. Убедитесь, что SOLO находится в замкнутом контуре (контакт № 5 переключателя Piano находится в нижнем положении в SOLO UNO)
3. Откройте Motion Terminal, подключитесь к SOLO и убедитесь, что вы установили «Command Mode» на «Digital». .
4. Убедившись, что вы находитесь в цифровом режиме, теперь убедитесь, что тип двигателя правильно выбран для любого типа бесколлекторного двигателя (BLDC-PMSM или BLDC-PMSM ultra fast), вы можете сначала УСТАНОВИТЬ его, а затем ПРОЧИТАТЬ, чтобы сделать Убедитесь, что тип двигателя правильно выбран в режиме SOLO.
5. Установите ограничение тока на уровне 70 % от пикового тока двигателя (для калибровки почти полного крутящего момента). Вы можете установить максимальное ограничение тока, если хотите выполнить калибровку полного крутящего момента.
6. Выполните идентификацию двигателя в терминале движения и подождите, пока это не будет сделано. ( 2 секунды )
7. Нажмите кнопку «Калибровка датчиков Холла» в терминале движения, после этого мотор на некоторое время начнет медленно вращаться по часовой стрелке, а затем остановится. После завершения калибровки, если вы нажмете «Читать все», вы увидите некоторое значение от 0 до 1 в разделе Encoder/Hall C.C.W и C.W offset терминала Motion. Это механические смещения в каждом направлении, которые оцениваются на основе механического позиционирования вашего датчика ХОЛЛА. Пожалуйста, запишите калибровочные значения где-нибудь в своей таблице для каждой комбинации. Для датчиков Холла значение смещения для направления C.C.W или C.W будет одинаковым.
После завершения калибровки, если вы нажмете «Читать все», вы увидите некоторое значение от 0 до 1 в разделе Encoder/Hall C.C.W и C.W offset терминала Motion. Это механические смещения в каждом направлении, которые оцениваются на основе механического позиционирования вашего датчика ХОЛЛА. Пожалуйста, запишите калибровочные значения где-нибудь в своей таблице для каждой комбинации. Для датчиков Холла значение смещения для направления C.C.W или C.W будет одинаковым.
8. Теперь автоматически после калибровки, если вы нажмете «Читать все параметры» в Motion Terminal, вы увидите, что находитесь в режиме цифрового крутящего момента, поэтому, ничего не делая, вы можете просто ввести эталонное значение крутящего момента в амперах внутри «Torque Reference_Iq [ A]» и посмотрите, начинает ли двигатель двигаться, например, вы можете установить значение, например, 30% от вашего максимального тока в опорном моменте, и посмотреть, выходит ли двигатель на номинальную скорость как в направлении C. C.W, так и по часовой стрелке. Если Мотор вообще не двигается или работает только в одном направлении, это означает, что комбинация проводов неправильная, в этом случае попробуйте подключить следующую комбинацию проводов к выходу ABC SOLO и снова начните с шага 7 выше ( замените проводку двигателя, повторите калибровку датчика Холла, проверьте контур крутящего момента).
C.W, так и по часовой стрелке. Если Мотор вообще не двигается или работает только в одном направлении, это означает, что комбинация проводов неправильная, в этом случае попробуйте подключить следующую комбинацию проводов к выходу ABC SOLO и снова начните с шага 7 выше ( замените проводку двигателя, повторите калибровку датчика Холла, проверьте контур крутящего момента).
В основном В 2 из этих 6 комбинаций вы должны увидеть, что двигатель хорошо работает в режиме крутящего момента, после этого вы можете перейти в режим скорости и проверить его поведение как по часовой стрелке, так и по часовой стрелке, чтобы убедиться, что все сделано правильно.
Таблица 2 – Пример таблицы для поиска наилучших комбинаций проводки для датчиков Холла
Датчики Холла: как они работают? — Технические советы по ремонту бытовой техники — Appliantology.org
Часто задаваемые вопросы | Видео по ремонту | Академия | Информационный бюллетень | Контакт
Оставайтесь на связи с нами. ..
..
Блог Сын самурая в Общий
Запись опубликована Сын самурая в технический разговор ·
2 259 просмотров
Знали вы о них или нет, датчики Холла повсюду . Каждый раз, когда вы видите двигатель на устройстве с какой-либо обратной связью по оборотам или сигналом скорости, на этом двигателе есть датчик Холла. Как и в случае любой повсеместно распространенной технологии бытовой техники, нам, техническим специалистам, важно знать, как они работают. Более глубокое понимание технологии означает более глубокое понимание того, как устранять неполадки.
Итак: что такое датчик Холла и как он работает? Это полупроводниковые устройства , так что, как и в случае с большей частью электроники, не стоит заходить слишком далеко в дебри. Нам просто нужно функциональное понимание их, поскольку это влияет на устранение неполадок.
Эти красные диски — это постоянных магнитов — что-то вроде тех, которые можно использовать, чтобы прикрепить что-нибудь к холодильнику. Синяя рамка — это датчик Холла. Обратите внимание, как каждый раз, когда вращающийся белый диск (предположим, что это ротор двигателя) проводит магнит мимо датчика Холла, датчик загорается. Это все, что делают датчики Холла. Они обнаруживают близость магнита. Это так просто.
Как они это делают? Используя электромагнитный принцип, известный как 
Вот изображение, демонстрирующее эффект Холла в действии в датчике Холла.
Опять же, не важно, что вы полностью осознаете все, что происходит внутри одного из этих датчиков.
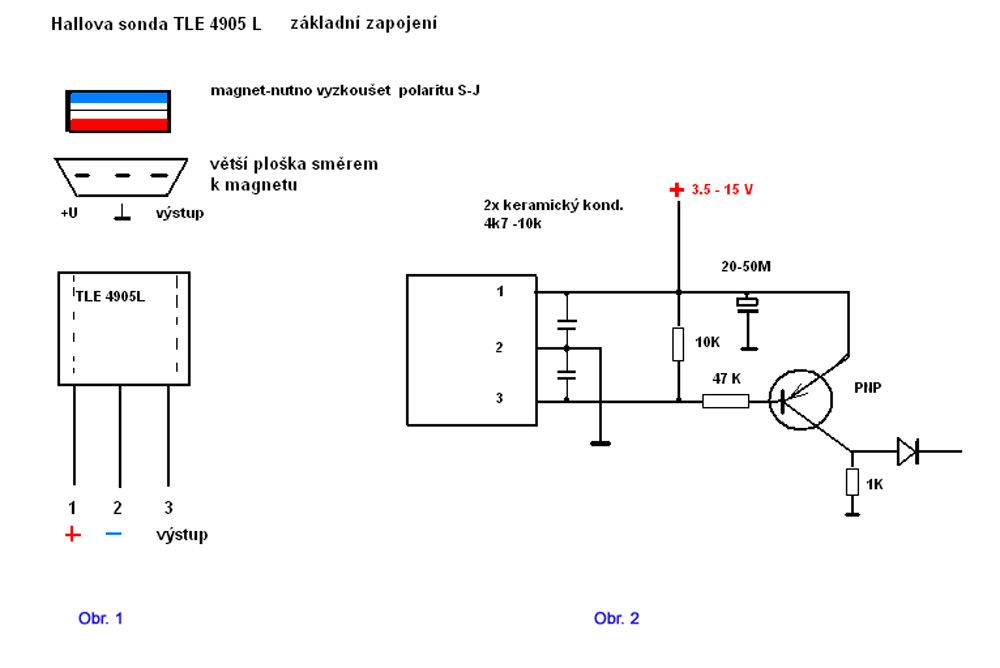
Ниже показано, как физически выглядит датчик Холла. Обратите внимание, что у него три терминала, и на этом рисунке каждый терминал помечен тем, что несет этот терминал.
Очень просто — у вас есть источник питания 5 В постоянного тока , заземление постоянного тока , а затем сигнал , который представляет собой индуцированное постоянное напряжение — напряжение Холла — от магнита, о котором мы говорили. о перед. 5 В постоянного тока и заземление постоянного тока предназначены для создания постоянного тока через датчик, на котором индуцируется напряжение Холла.
Все три провода будут подключаться обратно к плате управления.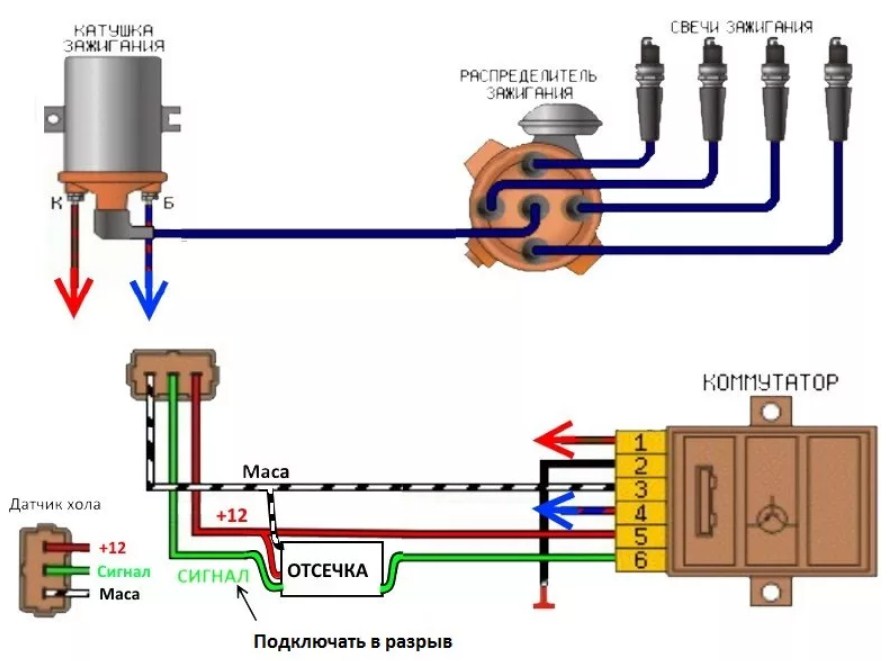 Эта плата подает напряжение постоянного тока и заземление и получает сигнал датчика в качестве входа. Логика на доске тогда интерпретирует этот сигнал, чтобы вычислить, работает ли двигатель и как быстро он вращается.
Эта плата подает напряжение постоянного тока и заземление и получает сигнал датчика в качестве входа. Логика на доске тогда интерпретирует этот сигнал, чтобы вычислить, работает ли двигатель и как быстро он вращается.
Итак, теперь, когда вы знаете, как они работают, как проверить датчик Холла? Это на самом деле очень просто, и вы уже могли догадаться. Все, что вам нужно сделать, это
И это все, что нужно! Очень простые, но очень полезные и универсальные устройства. Мы видим их повсюду, и теперь вы знаете, что происходит внутри этого маленького черного полупроводника.
Хотите по-настоящему понять технологии, присутствующие во всех устройствах, и узнать, как применить эти знания для устранения неполадок вашего устройства для получения максимальной прибыли? Нажмите здесь, чтобы ознакомиться с нашим онлайн-курсом обучения ремонту основной бытовой техники в Master Samurai Tech Academy.