
Момент силы — Википедия
Момент силы, приложенный к гаечному ключу. Направлен от зрителя
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению вектора силы и радиус-вектора, проведённого от оси вращения к точке приложения этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Общие сведения
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр. Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
- M→=[r→×F→],{\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right],}
где F→{\displaystyle {\vec {F}}} — сила, действующая на частицу, а r→{\displaystyle {\vec {r}}} — радиус-вектор частицы.
Видео по теме
Предыстория
Для того чтобы понять, откуда появилось обозначение момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы F→{\displaystyle {\vec {F}}} на рычаг r→{\displaystyle {\vec {r}}}, совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок dl{\displaystyle dl}, которому соответствует бесконечно малый угол dφ{\displaystyle d\varphi }. Обозначим через d→l{\displaystyle {\vec {d}}l} вектор, который направлен вдоль бесконечно малого отрезка dl{\displaystyle dl} и равен ему по модулю. Угол между вектором силы F→{\displaystyle {\vec {F}}} и вектором d→l{\displaystyle {\vec {d}}l} равен β{\displaystyle \beta }, а угол между векторами r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}} — α{\displaystyle \alpha }.
Следовательно, бесконечно малая работа dA{\displaystyle dA}, совершаемая силой F→{\displaystyle {\vec {F}}} на бесконечно малом участке dl{\displaystyle dl}, равна скалярному произведению вектора d→l{\displaystyle {\vec {d}}l} и вектора силы, то есть dA=F→⋅d→l{\displaystyle dA={\vec {F}}\cdot {\vec {d}}l}.
Теперь попытаемся выразить модуль вектора d→l{\displaystyle {\vec {d}}l} через радиус-вектор r→{\displaystyle {\vec {r}}}, а проекцию вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} — через угол α{\displaystyle \alpha }.
Так как для бесконечно малого перемещения рычага dl{\displaystyle dl} можно считать, что траектория перемещения перпендикулярна рычагу r→{\displaystyle {\vec {r}}}, используя соотношения для прямоугольного треугольника, можно записать следующее равенство: dl=rtgdφ{\displaystyle dl=r\mathrm {tg} \,d\varphi }, где в случае малого угла справедливо tgdφ=dφ{\displaystyle \mathrm {tg} \,d\varphi =d\varphi } и, следовательно, |dl→|=|r→|dφ{\displaystyle \left|{\vec {dl}}\right|=\left|{\vec {r}}\right|d\varphi }.
Для проекции вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} видно, что угол β=α−π2{\displaystyle \beta =\alpha -{\frac {\pi }{2}}}, а так как cos(α−π2)=sinα{\displaystyle \cos {\left(\alpha -{\frac {\pi }{2}}\right)}=\sin \alpha }, получаем, что |F→|cosβ=|F→|sinα{\displaystyle \left|{\vec {F}}\right|\cos \beta =\left|{\vec {F}}\right|\sin \alpha }.
Теперь запишем бесконечно малую работу через новые равенства: dA=|r→|dφ|F→|sinα{\displaystyle dA=\left|{\vec {r}}\right|d\varphi \left|{\vec {F}}\right|\sin \alpha }, или dA=|r→||F→|sin(α)dφ{\displaystyle dA=\left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin(\alpha )d\varphi }.
Теперь видно, что произведение |r→||F→|sinα{\displaystyle \left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin \alpha } есть не что иное, как модуль векторного произведения векторов r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}}, то есть |r→×F→|{\displaystyle \left|{\vec {r}}\times {\vec {F}}\right|}, которое и было принято обозначить за момент силы M{\displaystyle M}, или модуль вектора момента силы |M→|{\displaystyle \left|{\vec {M}}\right|}.
Теперь полная работа записывается просто: A=∫0φ|r→×F→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {r}}\times {\vec {F}}\right|d\varphi }, или A=∫0φ|M→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {M}}\right|d\varphi }.
Единицы
Момент силы имеет размерность «сила на расстояние» и единицу измерения ньютон-метр в системе СИ. Энергия и механическая работа также имеют размерность «сила на расстояние» и измеряются в системе СИ в джоулях. Следует заметить, что энергия — это скалярная величина, тогда как момент силы — величина (псевдо) векторная. Совпадение размерностей этих величин не случайность: момент силы 1 Н·м, приложенный через целый оборот, совершает механическую работу и сообщает энергию 2π{\displaystyle 2\pi } джоулей. Математически:
- E=Mθ,{\displaystyle E=M\theta ,}
где E{\displaystyle E} — энергия, M{\displaystyle M} — вращающий момент, θ{\displaystyle \theta } — угол в радианах.
Специальные случаи
Формула момента рычага
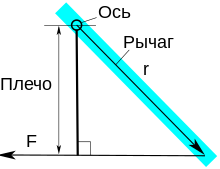 Момент, действующий на рычаг
Момент, действующий на рычагОчень интересен особый случай, представляемый как определение момента силы в поле:
- |M→|=|M→1||F→|,{\displaystyle \left|{\vec {M}}\right|=\left|{\vec {M}}_{1}\right|\left|{\vec {F}}\right|,}
где: |M→1|{\displaystyle \left|{\vec {M}}_{1}\right|} — момент рычага, |F→|{\displaystyle \left|{\vec {F}}\right|} — величина действующей силы.
Недостаток такого представления в том, что оно не дает направления момента силы, а только его величину. Если сила перпендикулярна вектору r→{\displaystyle {\vec {r}}}, момент рычага будет равен расстоянию от центра до точки приложения силы и момент силы будет максимален:
- |T→|=|r→||F→|.{\displaystyle \left|{\vec {T}}\right|=\left|{\vec {r}}\right|\left|{\vec {F}}\right|.}
Сила под углом
Если сила F→{\displaystyle {\vec {F}}} направлена под углом θ{\displaystyle \theta } к рычагу r, то M=rFsinθ{\displaystyle M=rF\sin \theta }.
Статическое равновесие
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для двумерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0,ΣV=0{\displaystyle \Sigma H=0,\,\Sigma V=0} и момент силы в третьем измерении ΣM=0{\displaystyle \Sigma M=0}.
Момент силы как функция от времени
Момент силы — производная по времени от момента импульса,
Видеоурок: вращающий момент- M→=dL→dt,{\displaystyle {\vec {M}}={\frac {d{\vec {L}}}{dt}},}
где L→{\displaystyle {\vec {L}}}
Момент силы Википедия
Момент силы, приложенный к гаечному ключу. Направлен от зрителя
Моме́нт си́лы (синонимы: кру́тящий момент, враща́тельный момент, вертя́щий момент, враща́ющий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, проведённого от оси вращения к точке приложения силы и вектора этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Общие сведения[ | ]
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр (Н·м). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
- M→=[r→×F→],{\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right],}
где
Кручение (деформация) — Википедия
Материал из Википедии — свободной энциклопедии
У этого термина существуют и другие значения, см. Кручение. Пример деформации кручения цилиндрического стержня
Пример деформации кручения цилиндрического стержня 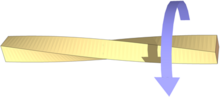 Деформация стержня прямоугольного сечения при кручении
Деформация стержня прямоугольного сечения при крученииКруче́ние — один из видов деформации тела. Возникает в том случае, если нагрузка прикладывается к телу в виде пары сил в его поперечной плоскости. При этом в поперечных сечениях тела возникает только один внутренний силовой фактор — крутящий момент. Примеры кручения: пружины растяжения-сжатия, валы.
При деформации кручения смещение каждой точки тела перпендикулярно к её расстоянию от оси приложенных сил и пропорционально этому расстоянию.
Угол закручивания цилиндрического стержня в границах упругих деформаций под действием момента T может быть определён из уравнения закона Гука для случая кручения
- φ=TℓJ0G,{\displaystyle \varphi _{}={T\ell \over J_{0}G},}
где:
- J0{\displaystyle J_{0}} — геометрический полярный момент инерции;
- ℓ{\displaystyle \ell } — длина стержня;
- G — модуль сдвига.
Отношение угла закручивания φ к длине ℓ{\displaystyle \ell } называют относительным углом закручивания
- θ=φℓ{\displaystyle \theta ={\frac {\varphi }{\ell }}}
Деформация кручения является частным случаем деформации сдвига.
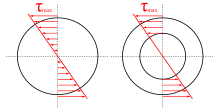 Распределение касательных напряжений при кручении
Распределение касательных напряжений при крученииВращающийся стержень, работающий на кручение, называют валом. Стержень, используемый как упругий элемент, который работает на скручивание, называется торсионом. Касательные напряжения τr{\displaystyle \tau _{r}}, возникающие в условиях кручения, определяются по формуле:
- τr=T⋅rJ0{\displaystyle \tau _{r}={T\cdot r \over J_{0}}},
где r — расстояние от оси кручения.
Очевидно, что касательные напряжения достигают наибольшего значения на поверхности вала при rmax=R{\displaystyle r_{max}=R} и при максимальном крутящем моменте Tmax{\displaystyle T_{max}}, то есть
- τmax=Tmax⋅RJ0=TmaxWp{\displaystyle \tau _{max}={T_{max}\cdot R \over J_{0}}={\frac {T_{max}}{W_{p}}}},
где Wp — полярный момент сопротивления.
Это даёт возможность записать условие прочности при кручении в таком виде:
- τmax=TmaxWp≤[τ]{\displaystyle \tau _{max}={\frac {T_{max}}{W_{p}}}\leq [\tau ]}.
Используя это условие, можно или по известным силовым факторам, которые создают крутящий момент Т, найти полярный момент сопротивления и далее, в зависимости от той или иной формы, найти размеры сечения, или наоборот — зная размеры сечения, можно вычислить наибольшую величину крутящего момента, которую можно допустить в сечении, которое в свою очередь, позволит найти допустимые величины внешних нагрузок.
Обсуждение:Момент инерции — Википедия
Нашел ошибку в формуле для цилиндра с заданными внутренним и внешним радиусами. Исправил «+» на «-«. 195.19.48.229 18:58, 19 мая 2011 (UTC)Mixa Исправил еще раз. Если не понятно — подумайте сами как момент инерции может увеличивать с увеличением внутреннего радиуса — толщина стенки уменьшается — следовательно масса системы тоже! 195.19.48.229 11:19, 20 мая 2011 (UTC)Mixa
- В том-то и дело, что масса остаётся прежней и именно она входит в формулу. Изменяется плотность. — Артём Коржиманов 16:05, 21 мая 2011 (UTC)
- Стоять там должен «+» — проверьте оба граничащих случая.(Уже исправлял это, опять распирает вас)—92.127.141.173 18:44, 15 июля 2011 (UTC)Ваш Великий Физик
Что значит масса остается прежней?− Она что при взвешивании остается прежней, если при постоянном внешнем радиусе, увеличивать внутренний.− Исправляйте ошибку.—Михаил Певунов 07:05, 20 декабря 2014 (UTC)М. Певунов
- Нет ошибки, там должен быть «+». 1-е, прочитайте комм.1 к таблице формул в статье. 2-е, прочитайте вывод формулы в этом обсуждении. Д.Ильин 07:25, 20 декабря 2014 (UTC).
В выводе формулы сказано. Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Так как толщина кольца это R — R1,то h это должно быть шириной кольца. И нарезаться должны тонкие кольца толщиной dr и шириной h. При переменном R1, и неизменной ширине масса будет меняться. Это и вызвало мое непонимание. —[[User:Михаил Певунов| 12:44, 20 декабря 2014 (UTC)
Правильная формула должна быть такая J = πρh(R2-R12
ρ - плотность массы, h - ширина кольца.
Проверяем граничные условия
При R1=0{\displaystyle R_{1}=0}
J=mR2/2{\displaystyle J=mR^{2}/2}
При R1=R{\displaystyle R_{1}=R} J=0{\displaystyle J=0} —Михаил Певунов 14:57, 22 декабря 2014 (UTC) —Михаил Певунов 15:18, 22 декабря 2014 (UTC)Подробнее
- Обе ф-лы правильные. Одна через плотность, другая — через массу. Обратите внимание, сомножитель πρh(R2-R12) как раз масса цилиндра. Д.Ильин 02:29, 23 декабря 2014 (UTC).
По вашей формуле, если R = R1 момент инерции равен J = mR2 По моей формуле J = 0 Так что, обе формулы правильные?? Беда доморощенных физиков-теоретиков в том, что они путают математическую точку с физической, математическое уравнение с физическим. То, что может математика, не всегда возможно в физике. Физик сразу скажет, что ваша формула не имеет физического смысла, потому как шайба с внутренним радиусом равным внешнему, массы не имеет, о каком моменте инерции можно говорить. Кстати, в математическом понимании относительности движения Солнце вращается вокруг Земли и находятся математики (Козыревцы), которые направляют свои телескопы по видимому ходу Солнца вокруг Земли (По часовой стрелки на 8,3 минуты) и регистрируют там Лучи Козырева—Михаил Певунов 01:20, 24 декабря 2014 (UTC)
- Очередной раз повторю: Обе ф-лы правильные. При стремлении R1 -> R, при неизменной массе плотность стремится к бесконечности, что физик сразу видит. Вырожденный случай R = R1 отвечает бесконечной плотности (если угодно, распределение поверхностной плотности можно описать двумерной функцией Дирака). Также замечу, что приведенный пример физически нереализуем, как и R1 > R.
- А рассуждения о «бедах доморощенных физиков-теоретиков» оставьте для ЖЖ и социальных сетей. В ВП такое не очень приветствуется.
- Д.Ильин 03:42, 24 декабря 2014 (UTC).
При постоянной массе любое увеличение любых радиусов увеличивает момент инерции. 87.138.99.244 13:41, 14 мая 2018 (UTC)
Геометрический момент инерции[править код]
- Меня терзают смутные сомнения… А в чём отличие его от обычного центробежного плоской фигуры? И почему не указано, расстояние от чего меряется? infovarius 21:07, 14 ноября 2008
Тоже полагаю, что употреблять в статике (строительная механика) термин динамики «Инерция» не корректно. Потому в строительной механике употребляют понятие. Статический момент площади сечения относительно нейтральной оси. И никакой инерции.
Слово момент, потому что единичная площадь умножается на расстояние до нейтральной оси. Как и силу на радиус называют моментом.
Внешний момент уравновешен внутренними силами сопротивления , которые пропорциональны единичной площади и ее расстоянию до нейтральной оси 0 < У < H/2
Для вертикального сечения высотой Н получаем два треугольника высотой Н/2, катетом σ, шириной b. Его площадь bσН/2.
Равнодействующая треугольника находится на расстоянии 2/3 H/2 = H/6
Внутренний момент сил сопротивления равен 2* bσН/2 * H/6 = σbH2/6
bH2/6 = W Момент сопротивления прямоугольного сечения. Найдете в любом справочнике.
Момент инерции прямоугольного сечения J = WH/2 = bH3/12 См.справочник.
В динамике момент силы, деленный на момент инерции дает угловое ускорение е. M/J = e
В статике момент сил, деленный на момент сопротивления дает максимальное напряжение M/W = σ
Численно выражения J не совпадают и имеют разный физический смысл и разные размерности.
К сожалению тут не вставляется графика, тогда бы было понятнее с обозначениями.—Михаил Певунов 15:26, 26 декабря 2014 (UTC)
Вопросы к господину Инфовариусу[править код]
Уважаемый участник Инфовариус! У меня к вам 2 вопроса:
- Почему Вы отменяете правки участников, не поинтересовавшись перед этим по какой причине участник внёс ту или иную правку? Не кажется ли Вам, что это невежливо?
- Будьте добры обоснуйте, что масса является мерой инертности тела именно в поступательном, а не прямолинейном движении. Дело в том, что каждая точка — я подчёркиваю, ТОЧКА — тела может совершать вращательное движение. И следовательно, инерционность точки может харкактеризоваться не только её массой, но и расстоянием до точки вращения. То есть инерционность каждой точки характеризуется её моментом инерции относительно её (точки) центра вращения. Соответственно мерой инертности тела в целом при поступательном движении является не его масса, а сумма инертных свойств — моментов инерции — всех точек тела. А теперь, господин Инфовариус, укажите, пожалуйста, на ошибку в моих рассуждениях. С уважением, —Ванька Иваныч 14:32, 25 апреля 2010 (UTC)
- Я и 🙂 Аргументирую. 1) точка не может сама по себе совершать вращательное движение (нету у неё таких степеней свободы), так что она по определению движется поступательно; 2) соответственно на точку может действовать только сила (не момент!), которая, будучи переменной во времени, может направлять точку по любой траектории — хоть прямолинейной, хоть по окружности; 3) как вы помните из курса механики, если суммарный момент сил на тело равен нулю, то тело не вращается, т.е. движется поступательно, при этом его центр масс может описывать сколь угодно сложную траекторию опять же из-за переменности равнодействующей. При этом «противодействует» этой силе именно масса, а не распределение её в теле («момент инерции»). —infovarius 19:00, 25 апреля 2010 (UTC)
- Да, в ваших рассуждениях я не вижу ошибки. Действительно, если прекратить действие всех сил на точку, то она по инерции будет двигаться по прямой, и значит, у неё нет инерционных свойств при вращательном движении. Это отличает точку от твёрдого тела —Ванька Иваныч 02:32, 26 апреля 2010 (UTC)
В формуле для момента инерции толстостенного цилиндра должен стоять плюс, а не минус. 77.238.228.165 07:32, 18 декабря 2010 (UTC)skynoir
- Всё-таки минус. Хотя бы потому, что при r1→0{\displaystyle r_{1}\to 0} формула должна переходить в формулу для сплошного цилиндра. Rasim 13:19, 18 декабря 2010 (UTC)
- Всё-таки плюс. При r1→r2{\displaystyle r_{1}\to r_{2}} мы по «геометрии» должны получить тонкостенный цилинцр mr2{\displaystyle mr^{2}}, а по формуле получаем 0. При r1→0{\displaystyle r_{1}\to 0} и со знаком плюс в формуле, и со знаком минус мы получаем правильный ответ, так что рассуждения человека выше просто недодумка.Вы не рассмотрели всех критических случаев..
- Да, вы правы. Rasim 19:39, 19 мая 2011 (UTC)
Вывод формул, грохнутый кем-то при редактировании[править код]
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобъём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJi. Тогда
- J=∑dJi=∑Ri2dm.(1){\displaystyle J=\sum dJ_{i}=\sum R_{i}^{2}dm.\qquad (1)}
Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду
- J=∑R2dm=R2∑dm=mR2.{\displaystyle J=\sum R^{2}dm=R^{2}\sum dm=mR^{2}.}
Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Разобьём его на тонкие кольца толщиной dr. Масса и момент инерции тонкого кольца радиуса r составит
- dm=ρdV=ρ⋅2πrhdr;dJ=r2dm=2πρhr3dr.{\displaystyle dm=\rho dV=\rho \cdot 2\pi rhdr;\qquad dJ=r^{2}dm=2\pi \rho hr^{3}dr.}
Момент инерции толстого кольца найдём как интеграл
- J=∫R1RdJ=2πρh∫R1Rr3dr=2πρhr44|R1R==12πρh(R4−R14)=12πρh(R2−R12)(R2+R12).{\displaystyle {\begin{aligned}J&=\int _{R_{1}}^{R}dJ=2\pi \rho h\int _{R_{1}}^{R}r^{3}dr=2\pi \rho h\left.{\frac {r^{4}}{4}}\right|_{R_{1}}^{R}=\\&={\frac {1}{2}}\pi \rho h\left(R^{4}-R_{1}^{4}\right)={\frac {1}{2}}\pi \rho h\left(R^{2}-R_{1}^{2}\right)\left(R^{2}+R_{1}^{2}\right).\end{aligned}}}
Поскольку объём и масса кольца равны
- V=π(R2−R12)h;m=ρV=πρ(R2−R12)h,{\displaystyle V=\pi \left(R^{2}-R_{1}^{2}\right)h;\qquad m=\rho V=\pi \rho \left(R^{2}-R_{1}^{2}\right)h,}
получаем окончательную формулу для момента инерции кольца
- J=12m(R2+R12).{\displaystyle J={\frac {1}{2}}m\left(R^{2}+R_{1}^{2}\right).}
Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R1 = 0), получим формулу для момента инерции цилиндра (диска):
- J=12mR2.{\displaystyle J={\frac {1}{2}}mR^{2}.}
Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh, перепендикулярные оси конуса. Радиус такого диска равен
- r=RhH,{\displaystyle r={\frac {Rh}{H}},}
где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска. Масса и момент инерции такого диска составят
- dm=ρV=ρ⋅πr2dh;{\displaystyle dm=\rho V=\rho \cdot \pi r^{2}dh;}
- dJ=12r2dm=12πρr4dh=12πρ(RhH)4dh;{\displaystyle dJ={\frac {1}{2}}r^{2}dm={\frac {1}{2}}\pi \rho r^{4}dh={\frac {1}{2}}\pi \rho \left({\frac {Rh}{H}}\right)^{4}dh;}
Интегрируя, получим
- J=∫0HdJ=12πρ(RH)4∫0Hh5dh=12πρ(RH)4h55|0H==110πρR4H=(ρ⋅13πR2H)310R2=310mR2.{\displaystyle {\begin{aligned}J&=\int _{0}^{H}dJ={\frac {1}{2}}\pi \rho \left({\frac {R}{H}}\right)^{4}\int _{0}^{H}h^{4}dh={\frac {1}{2}}\pi \rho \left({\frac {R}{H}}\right)^{4}\left.{\frac {h^{5}}{5}}\right|_{0}^{H}=\\&={\frac {1}{10}}\pi \rho R^{4}H=\left(\rho \cdot {\frac {1}{3}}\pi R^{2}H\right){\frac {3}{10}}R^{2}={\frac {3}{10}}mR^{2}.\end{aligned}}}
Сплошной однородный шар
Вывод формулы
Разобъём шар на тонкие диски толщиной dh, перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле
- r=R2−h3.{\displaystyle r={\sqrt {R^{2}-h^{2}}}.}
Масса и момент инерции такого диска составят
- dm=ρdV=ρ⋅πr2dh;{\displaystyle dm=\rho dV=\rho \cdot \pi r^{2}dh;}
- dJ=12r2dm=12πρr4dh=12πρ(R2−h3)2dh=12πρ(R4−2R2h3+h5)dh.{\displaystyle dJ={\frac {1}{2}}r^{2}dm={\frac {1}{2}}\pi \rho r^{4}dh={\frac {1}{2}}\pi \rho \left(R^{2}-h^{2}\right)^{2}dh={\frac {1}{2}}\pi \rho \left(R^{4}-2R^{2}h^{2}+h^{4}\right)dh.}
Момент инерции сферы найдём интегрированием:
- J=∫−RRdJ=2∫0RdJ=πρ∫0R(R4−2R2h3+h5)dh==πρ(R4h−23R2h4+15h5)|0R=πρ(R5−23R5+15R5)=815πρR5==(43πR3ρ)⋅25R2=25mR2.{\displaystyle {\begin{aligned}J&=\int _{-R}^{R}dJ=2\int _{0}^{R}dJ=\pi \rho \int _{0}^{R}\left(R^{4}-2R^{2}h^{2}+h^{4}\right)dh=\\&=\pi \rho \left.\left(R^{4}h-{\frac {2}{3}}R^{2}h^{3}+{\frac {1}{5}}h^{5}\right)\right|_{0}^{R}=\pi \rho \left(R^{5}-{\frac {2}{3}}R^{5}+{\frac {1}{5}}R^{5}\right)={\frac {8}{15}}\pi \rho R^{5}=\\&=\left({\frac {4}{3}}\pi R^{3}\rho \right)\cdot {\frac {2}{5}}R^{2}={\frac {2}{5}}mR^{2}.\end{aligned}}}
Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R:
- J0=25MR2=815πρR5.{\displaystyle J_{0}={\frac {2}{5}}MR^{2}={\frac {8}{15}}\pi \rho R^{5}.}
Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR.
- J=dJ0dRdR=ddR(815πρR5)dR==83πρR4dR=(ρ⋅4πR2dR)23R2=23mR2{\displaystyle {\begin{aligned}J&={\frac {dJ_{0}}{dR}}dR={\frac {d}{dR}}\left({\frac {8}{15}}\pi \rho R^{5}\right)dR=\\&={\frac {8}{3}}\pi \rho R^{4}dR=\left(\rho \cdot 4\pi R^{2}dR\right){\frac {2}{3}}R^{2}={\frac {2}{3}}mR^{2}\end{aligned}}}
Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобъём стержень на малые фрагменты длиной dr. Масса и момент инерции такого фрагмента равна
- dm=mdrl;dJ=r2dm=mr2drl.{\displaystyle dm={\frac {mdr}{l}};\qquad dJ=r^{2}dm={\frac {mr^{2}dr}{l}}.}
Интегрируя, получим
- J=∫−l/2l/2dJ=2∫0l/2dJ=2ml∫0l/2r2dr=2mlr33|0l/2=2mll324=112ml2.{\displaystyle J=\int _{-l/2}^{l/2}dJ=2\int _{0}^{l/2}dJ={\frac {2m}{l}}\int _{0}^{l/2}r^{2}dr={\frac {2m}{l}}\left.{\frac {r^{3}}{3}}\right|_{0}^{l/2}={\frac {2m}{l}}{\frac {l^{3}}{24}}={\frac {1}{12}}ml^{2}.}
Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l/2. По теореме Штейнера новый момент инерции будет равен
- J=J0+mr2=J0+m(l2)2=112ml2+14ml2=13ml2.{\displaystyle J=J_{0}+mr^{2}=J_{0}+m\left({\frac {l}{2}}\right)^{2}={\frac {1}{12}}ml^{2}+{\frac {1}{4}}ml^{2}={\frac {1}{3}}ml^{2}.}
AdmiralHood 05:30, 23 марта 2011 (UTC)
Равнобедренный треугольник (ось проходит через вершину и перпендикулярна плоскости треугольника)
Вывод формулы
AdmiralHood 03:41, 2 января 2012 (UTC)
Я заменил «центр масс тела» выражением «жёстко закреплённого центр масс тела» в выражении «проходящей через центр масс тела параллельно рассматриваемой оси» указанного раздела, так-как она важна по физике явлений вращения тел. В случае движения не закреплённого твёрдого тела во внешнем поле (например планеты и их спутники, Луна, электроны в атоме) Теорема Штейнера не применима. В этом случае момент импульса твердого тела равен сумме моментов импульсов орбитального и собственного вращения (спина) и понятия моментов инерции разделены. Для не закреплённого твёрдого тела существует только одно понятие момента инерции ― собственный. Если нет какого либа механизма воздействия друг на друга (типа спин-орбитального), то орбитальное движение чисто поступательное вне зависимости от состояния собственного вращения тела (собственного момента импульса, в нерелятивистском приближении). Ваграм Мыхитарян 03:56, 10 октября 2014 (UTC)
- В начале статьи в разделе «Осевой момент инерции» уже сказано, что речь в статье идёт о моментах инерции механических систем именно относительно неподвижных осей. Поэтому повторять в дальнейшем уже сказанное представляется излишним. —VladVD 11:43, 10 октября 2014 (UTC)
- В данном разделе реч идет именно о подвижой оси, проходящей через центр масс тела параллельно рассматриваемой оси и которая вращается вокруг рассматриваемой оси. Поэтому и следует уточнить также движение тела относительно оси проходящей через центр масс и рассматриваемой оси. Замечу также, что если тело жестко связано с рассматриваемой осью, то оно вращается вокруг собственной оси с такой же угловой скоростью как вокруг рассматриваемой оси. Если собственная ось свободно закреплена, то вращение вокруг собственной оси отсутствует и тело вращается (точнее сказать перемещается) только вокруг рассматриваемой оси. Ваграм Мыхитарян 15:56, 10 октября 2014 (UTC)
- Если вы внимательно посмотрите доказательство теоремы Гюйгенса — Штейнера, то, думаю, убедитесь, что вы не правы.
- Если всё же вы останетесь при своём мнении, то вы будете должны в подтверждение его предоставить АИ. Со своей стороны должен отметить, что я специально посмотрел несколько книг по теоретической механике и нигде в формулировках теоремы не обнаружил предлагаемого вами уточнения.
- В любом случае, если вашу правку отменили, вы в соответствии с ВП:КОНС не имеете права возвращать её в статью, а должны добиваться консенсуса здесь. Иначе ваше поведение может быть расценено, как нарушение ВП:ВОЙ. Пока вашу правку удаляю, поскольку согласно ВП:КОНС, статья должна оставаться в том состоянии, в котором она находилась до внесения спорных правок. Дальнейший возврат без предварительного обсуждения и предоставления источников на странице обсуждения с вашей стороны будет нарушением ВП:ВОЙ и может привести к блокировке. —VladVD 17:10, 10 октября 2014 (UTC)
- Представьте, что держите велосипедное колесо за ось на расстоянии l и вращаетесь вокруг своей оси с угловой скоростью Ω. Так как колесо свободно вращается вокруг своей оси, то не возникает момента силы вращения самого колеса, и он совершает только поступательное движение (перемещение без вращения). Энергия W выражается обычной формулой кинетической энергии через массу m и скорость v перемещения колеса.
- В данном разделе реч идет именно о подвижой оси, проходящей через центр масс тела параллельно рассматриваемой оси и которая вращается вокруг рассматриваемой оси. Поэтому и следует уточнить также движение тела относительно оси проходящей через центр масс и рассматриваемой оси. Замечу также, что если тело жестко связано с рассматриваемой осью, то оно вращается вокруг собственной оси с такой же угловой скоростью как вокруг рассматриваемой оси. Если собственная ось свободно закреплена, то вращение вокруг собственной оси отсутствует и тело вращается (точнее сказать перемещается) только вокруг рассматриваемой оси. Ваграм Мыхитарян 15:56, 10 октября 2014 (UTC)

- Если же держитесь за ободок колеса и вращаетесь вокруг своей оси с угловой скоростью Ω, то колесо начинает вращаться вокруг собственной оси с такой же угловой скоростью Ω. Энергия равна сумме кинетической энергии и энергии собственного вращения колеса c моментом инерции I (наглядный вывод теоремы Гюйгенса-Штерна). Заметим, что в данном случае мы рассматривали вариант жёстко закреплённой оси (жёстко закреплённого центра масс) колеса. Это соответствует жесткому спин-орбитальному взаимодействию, когда угловые скорости вращения одинаковы.
- В других случаях, скажем, у колеса есть осевое трение, или спин-орбитальное взаимодействие электрона в атоме, в выражении энергии будут другие соотношения поступательной энергии и энергии собственного вращения (спина). В частности, движение Луны соответствует случаю жёстко закреплённого центра масс (Луна все время обращена к Земле с одной и той же стороной), а движение Земли вокруг Солнца – случаю свободно закреплённого центра масс (наклон оси, период собственного вращения никак не связаны с движением вокруг Солнца).
- А что касается теореме Гюйгенса-Штерна, то там очевидно предполагается, что система совершает жесткое вращение (одна угловая скорость для всех), поэтому и вводиться понятие момента инерции «по определению» как сумма mir’i2. Энергия и момент импульса выражаются таким моментом инерции через одну скорость углового вращения. Если же угловые скорости орбитального и собственного вращения разные, то в выражении энергии и момента импульса моменты инерции входят по отдельности со своими скоростями углового вращения — орбитального и собственного. Было бы странно описать движение Земли вокруг Солнца, молекулы в газе, и тем более электрона в атоме одним таким моментом инерции «по определению». Ваграм Мыхитарян 23:40, 10 октября 2014 (UTC)
- Изложенные вами представления я вполне разделяю, но при этом не думаю, что из них вытекает необходимость какой-либо коррекции формулировки теоремы. —VladVD 08:33, 12 октября 2014 (UTC)
- А что касается теореме Гюйгенса-Штерна, то там очевидно предполагается, что система совершает жесткое вращение (одна угловая скорость для всех), поэтому и вводиться понятие момента инерции «по определению» как сумма mir’i2. Энергия и момент импульса выражаются таким моментом инерции через одну скорость углового вращения. Если же угловые скорости орбитального и собственного вращения разные, то в выражении энергии и момента импульса моменты инерции входят по отдельности со своими скоростями углового вращения — орбитального и собственного. Было бы странно описать движение Земли вокруг Солнца, молекулы в газе, и тем более электрона в атоме одним таким моментом инерции «по определению». Ваграм Мыхитарян 23:40, 10 октября 2014 (UTC)
- Что же касается АИ, то (для всех народов и времен) это
- Л. Д. Ландау, Е. М. Лифшиц, Теоретическая физика, Т. 1, Механика, 2004, стр. 131, §32. Тензор инерции
- Для наглядности добавлены последние два предложения и формулы (почти что copy-paste). Было бы лучше изложить эти вопросы по книге Л. Д. Ландау и Е. М. Лифшица, где понятия орбитального и собственного вращения разделены и строго изложены.
- § 32. Тензор инерции
Для вычисления кинетической энергии твердого тела рассмотрим его как дискретную систему материальных точек:
- T = Σmv2/2
где суммирование производится по всем точкам, составляющим тело. Здесь и ниже мы опускаем индексы, нумерующие эти точки, с целью упрощения записи формул. Подставив сюда (31.2, скорость точки v равна сумме скоростей поступательного V и вращательного [Ω×r] движений), получим
- T = Σm(V + [Ω×r])2/2 = Σ mV2/2 + ΣmV[Ω×r] +Σm[Ω×r]2/2 .
Скорости V и Ω одинаковы для всех точек твердого тела. Поэтому в первом члене V2/2 выносится за знак суммы, а сумма Σm есть масса тела, которую мы будем обозначать буквой μ. Второй член запишем так:
- ΣmV[Ω×r] = Σmr[V×Ω] = [V×Ω] Σmr.
Отсюда видно, что если начало движущейся системы координат выбрано, как условлено, в центре инерции R, то этот член обращается в нуль, так как в этом случае Σmr = RΣm = 0. Наконец, в третьем члене раскрываем квадрат векторного произведения и в результате находим
- T = Σ mV2/2 + Σm(Ω2r2 -(Ωr)2)/2 = μV2/2 + Σm(Ω2r2 — (Ωr)2)/2. (32.1)
Таким образом, кинетическая энергия твердого тела может быть представлена в виде суммы двух частей. Первый член в (32.1) есть кинетическая энергия поступательного движения – она имеет такой вид, как если бы вся масса тела была сосредоточена в его центре инерции. Второй член есть кинетическая энергия вращательного движения с угловой скоростью Ω вокруг оси, проходящей через центр инерции. Подчеркнем, что возможность такого разделения кинетической энергии на две части обусловлена выбором начала связанной с телом системы координат именно в его центре инерции.
Если центр инерции также совершает вращательное движение с угловой скоростью ω относительно другой оси на расстоянии d, то имеем V = [ω×d] и из (32.1) получим
- T = μω2d2/2 + Σm(Ω
Момент силы — Википедия (с комментариями)
Ты — не раб!
Закрытый образовательный курс для детей элиты: «Истинное обустройство мира».
http://noslave.org
Материал из Википедии — свободной энциклопедии
| Момент силы | |
| Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec{M}=\left[\vec{r}\times\vec{F}\right] | |
| Размерность | L2MT−2 |
|---|---|
| Единицы измерения | |
| СИ | Н·м |
| СГС | Дина-сантиметр |
| СГСЭ | Ошибка Lua в Модуль:Wikidata на строке 170: attempt to index field ‘wikibase’ (a nil value). |
| СГСМ | Ошибка Lua в Модуль:Wikidata на строке 170: attempt to index field ‘wikibase’ (a nil value). |
| Другие единицы | Ошибка Lua в Модуль:Wikidata на строке 170: attempt to index field ‘wikibase’ (a nil value). |
| Примечания | |
Псевдовектор | |
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Общие сведения
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр. Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec M = \left[\vec r\times\vec F\right] ,
где Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F — сила, действующая на частицу, а Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r
Предыстория
Для того чтобы понять, откуда появилось обозначение момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F на рычаг Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r , совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dl , которому соответствует бесконечно малый угол Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): d\varphi . Обозначим через Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl вектор, который направлен вдоль бесконечно малого отрезка Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dl и равен ему по модулю. Угол между вектором силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F и вектором Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl равен Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \beta , а угол между векторами Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r и Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F — Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \alpha .
Следовательно, бесконечно малая работа Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dA , совершаемая силой Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F на бесконечно малом участке Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dl , равна скалярному произведению вектора Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl и вектора силы, то есть Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dA = \vec F \cdot \vec dl .
Теперь попытаемся выразить модуль вектора Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl через радиус-вектор Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r , а проекцию вектора силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F на вектор Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl — через угол Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \alpha .
Так как для бесконечно малого перемещения рычага Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dl можно считать, что траектория перемещения перпендикулярна рычагу Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r , используя соотношения для прямоугольного треугольника, можно записать следующее равенство: Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dl = r \mathrm{tg}\,d\varphi , где в случае малого угла справедливо Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \mathrm{tg}\,d\varphi = d\varphi и, следовательно, Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec{dl}\right| = \left|\vec r\right| d\varphi .
Для проекции вектора силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F на вектор Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec dl видно, что угол Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \beta = \alpha — \frac{\pi}{2} , а так как Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \cos{\left(\alpha — \frac{\pi}{2}\right)} = \sin\alpha , получаем, что Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec F\right|\cos\beta = \left|\vec F\right|\sin\alpha .
Теперь запишем бесконечно малую работу через новые равенства: Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dA = \left|\vec r\right|d\varphi\left|\vec F\right|\sin\alpha , или Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): dA = \left|\vec r\right|\left|\vec F\right|\sin(\alpha) d\varphi .
Теперь видно, что произведение Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec r\right|\left|\vec F\right|\sin\alpha есть не что иное, как модуль векторного произведения векторов Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r и Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F , то есть Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec r\times\vec F\right| , которое и было принято обозначить за момент силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): M , или модуль вектора момента силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec M\right| .
Теперь полная работа записывается просто: Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A = \int\limits_0^\varphi \left|\vec r\times\vec F\right| d\varphi , или Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A = \int\limits_0^\varphi \left|\vec M\right| d\varphi .
Единицы
Момент силы имеет размерность «сила на расстояние» и единицу измерения ньютон-метр в системе СИ. Энергия и механическая работа также имеют размерность «сила на расстояние» и измеряются в системе СИ в джоулях. Следует заметить, что энергия — это скалярная величина, тогда как момент силы — величина (псевдо) векторная. Совпадение размерностей этих величин не случайность: момент силы 1 Н·м, приложенный через целый оборот, совершает механическую работу и сообщает энергию Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): 2\pi джоулей. Математически:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): E = M\theta ,
где Е — энергия, M — вращающий момент, θ — угол в радианах.
Специальные случаи
Формула момента рычага
Очень интересен особый случай, представляемый как определение момента силы в поле:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec M\right| = \left|\vec{M}_1\right| \left|\vec F\right| , где: Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec{M}_1\right| — момент рычага, Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec F\right| — величина действующей силы.
Проблема такого представления в том, что оно не дает направления момента силы, а только его величину. Если сила перпендикулярна вектору Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r , момент рычага будет равен расстоянию до центра и момент силы будет максимален:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \left|\vec{T}\right| = \left|\vec r\right| \left|\vec F\right|
Сила под углом
Если сила Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F направлена под углом Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \theta к рычагу r, то Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): M = r F \sin\theta .
Статическое равновесие
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для двумерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0, ΣV=0 и момент силы в третьем измерении ΣM=0.
Момент силы как функция от времени
Момент силы — производная по времени от момента импульса,
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec M = \frac{d\vec L}{dt} ,
где Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec L — момент импульса.
Возьмём твердое тело. Движение твёрдого тела можно представить как движение конкретной точки и вращения вокруг неё.
Момент импульса относительно точки O твёрдого тела может быть описан через произведение момента инерции и угловой скорости относительно центра масс и линейного движения центра масс.
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec{L_o} = I_c\,\vec\omega + [M(\vec{r_o} — \vec{r_c}), \vec{v_c}]
Будем рассматривать вращающиеся движения в системе координат Кёнига, так как описывать движение твёрдого тела в мировой системе координат гораздо сложнее.
Продифференцируем это выражение по времени. И если Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): I — постоянная величина во времени, то
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec M = I\frac{d\vec\omega}{dt} = I\vec\alpha ,
где Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec\alpha — угловое ускорение, измеряемое в радианах в секунду за секунду (рад/с2). Пример: вращается однородный диск.
Если тензор инерции меняется со временем, то движение относительно центра масс описывается с помощью динамического уравнения Эйлера:
Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec{M_c} = I_c\frac{d\vec\omega}{dt} + [\vec w, I_c\vec w] .
Отношение между моментом силы и мощностью
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу. Так же и момент силы, если совершает действие через угловое расстояние, он совершает работу.
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): P = \vec M \cdot \vec\omega
В системе СИ мощность Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): P измеряется в Ваттах, момент силы — в ньютон-метрах, а угловая скорость — в радианах в секунду.
Отношение между моментом силы и работой
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A = \int_{\theta_1}^{\theta_2} \left|\vec M\right| \mathrm{d}\theta
В случае постоянного момента получаем:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A = \left|\vec M\right|\theta
В системе СИ работа Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A измеряется в джоулях, момент силы — в ньютон·метр, а угол — в радианах.
Обычно известна угловая скорость Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \omega в радианах в секунду и время действия момента Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): t .
Тогда совершённая моментом силы работа рассчитывается как:
- Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): A = \left|\vec M\right|\omega t
Момент силы относительно точки
Если имеется материальная точка Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): O_F , к которой приложена сила Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F , то момент силы относительно точки Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): O равен векторному произведению радиус-вектора Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec r , соединяющего точки Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): O и Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): O_F , на вектор силы Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec F :
Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): \vec{M_O} = \left[\vec r \times \vec F\right] .
Момент силы относительно оси
Момент силы относительно оси равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную этой оси относительно точки пересечения оси с плоскостью, то есть Невозможно разобрать выражение (Выполняемый файл <code>texvc</code> не найден; См. math/README — справку по настройке.): M_z(F) = M_o(F’) = F’h’ .
Единицы измерения
Момент силы измеряется в ньютон-метрах. 1 Н·м — это момент, который производит сила 1 Н на рычаг длиной 1 м, приложенная к концу рычага и направленная перпендикулярно ему.
Измерение момента
На сегодняшний день измерение момента силы осуществляется с помощью тензометрических, оптических и индуктивных датчиков нагрузки.
См. также
<imagemap>: неверное или отсутствующее изображение | В этой статье не хватает ссылок на источники информации.Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете [http://o-ili-v.ru/wiki/index.php?title=%D0%9C%D0%BE%D0%BC%D0%B5%D0%BD%D1%82_%D1%81%D0%B8%D0%BB%D1%8B&action=edit отредактировать] эту статью, добавив ссылки на авторитетные источники. Эта отметка установлена |