
Синхронный, асинхронный – какая разница?! — Электродвигатели для складского и подъемно-транспортного оборудования – Склад и техника
И. Станкевич
Обычно о том, какие электродвигатели стоят на том или ином оборудовании, его владельцы особенно не задумываются, но только до тех пор, пока они не выходят из строя. А уже первые «болезни» этих «скромных тружеников» вызывают коллапс необъятных потоков грузов. На склады России поступает много иностранного подъемно-транспортного оборудования, и читателям будет интересно узнать, какие существуют типы и исполнения электродвигателей, работающих в этих машинах и механизмах.
Электродвигатели – непременная составляющая подъемно-транспортного и автоматизированного оборудования: конвейеров, автоматизированных складов, штабелеров, упаковочных автоматов и иной складской техники. Обычно эти агрегаты подбирают для своего оборудования сами изготовители, но все чаще бывает так, что покупатели и владельцы машин сами могут выбирать электрические силовые агрегаты для нужд своего предприятия в зависимости, например, от специфики условий работы отдельных его участков.
В складском и подъемно-транспортном оборудовании наиболее широко применяют электродвигатели пяти типов:
- электродвигатели постоянного тока с возбуждением от постоянного магнита;
- асинхронные электродвигатели переменного тока. Их применяют в оборудовании непрерывного цикла, например, в обычных конвейерах;
- серводвигатели (сервомоторы). Они работают в машинах, которые должны совершать точные движения, перемещать и позиционировать грузы на строго определенные места: в штабелерах, автоматических складских системах;
- линейные асинхронные двигатели. Используются в оборудовании, для которого важна прежде всего высокая скорость работы, например, в сортировочных машинах;
- мотор-ролики (или мотор-барабаны), т.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.В чем преимущества асинхронных электродвигателей?
Асинхронные двигатели переменного тока проще и дешевле электродвигателей других типов, поэтому в настоящее время их применяют все чаще. При выборе асинхронного двигателя следует учитывать два фактора – к.п.д. преобразования энергии и тип исполнения агрегата.
К.п.д. В ряде стран законодательством установлена минимальная величина к.п.д. для электродвигателей приводов, однако многие производители изготавливают электродвигатели по более жестким стандартам Национальной ассоциации производителей электрооборудования США (NEMA).
У электродвигателей обычного качества к.п.д. равен 75…85%, у агрегатов высшего качества – 85…95%. Как считают специалисты, агрегаты с высоким к.п.д. стоят намного дороже обычных, но если электродвигатель будет работать непрерывно, он окупится быстро. Кроме того, благодаря экономии энергии улучшается экологическая обстановка, на которую все больше обращают внимание в цивилизованных государствах.
Тип исполнения – важная характеристика при выборе электродвигателя. Существует пять основных исполнений асинхронных электродвигателей:
• ODP (Open drip proof) – «каплезащищенный электродвигатель открытого исполнения». Этот тип электродвигателей наиболее широко используют в промышленности. Они не оборудованы вентилятором и имеют проемы в корпусе, через которые внутрь может проникнуть грязь и влага, поэтому использовать такие электродвигатели рекомендуется только в закрытых помещениях;
• TEFC (Totally Enclosed Fan Cooled) – «закрытого типа с вентиляторным охлаждением».
• TENV (Totally Enclosed Non-Ventilated Motor) – «закрытого типа без охлаждения». Эти электродвигатели также используются в подъемно-транспортном оборудовании складов, если есть внешний источник, создающий воздушный поток для охлаждения двигателя;
• TEBC (Totally Enclosed Blower-Cooled Motor) – «охлаждаемый обдувом». Эти двигатели комплектуют собственным вентилятором, но расположенным и управляемым снаружи. Электродвигатели типа TEBC обычно применяют в оборудовании высокой мощности: в подъемных кранах, лебедках и т. п. или в оборудовании, работающем с переменной скоростью, где электродвигатель иногда может работать с частотой вращения, близкой к нулю;
• EPFC (Explosion Proof Fan Cooled Motor) – «во взрывозащищенном исполнении с вентиляторным
охлаждением». Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Возможности применения любого асинхронного электродвигателя расширяются благодаря использованию электропривода с частотным регулированием (VFD). Асинхронные электродвигатели традиционной конструкции работают с постоянной частотой. Электропривод с частотным регулированием позволяет менять скорость двигателя и всей машины. В складском подъемно-транспортном оборудовании электроприводы с частотным регулированием позволяют максимально увеличивать скорость в «пиковые» периоды работы и снижать в другое время, благодаря чему экономится энергия и средства.
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.
Линейные асинхронные электродвигатели
Линейные асинхронные электродвигатели – новинка в отрасли складского подъемно-транспортного оборудования. Они позволяют значительно увеличить скорость движений машин при замечательной их повторяемости и точности.
В такой конструкции нет деталей, которые бы изнашивались. Линейные асинхронные электродвигатели обеспечивают точность движений до 0,0335 мм на 1 м перемещения, т. е. позволяют выполнять прецизионные работы. Насколько уникальна такая способность устройств, иллюстрирует тот факт, что толщина человеческого волоса составляет около 0,09 мм, т. е. в три раза больше! Скорость работы линейных асинхронных электродвигателей очень высокая – до 5 м/с, а следовательно, длительность рабочих циклов у них небольшая и производительность на высочайшем уровне. Скорость перемещения ползуна на разных отрезках в течение одного цикла можно менять, а можно задавать пошаговое перемещение – это очень полезное качество для некоторых автоматических машин.
Мотор-ролики
Линейные асинхронные электродвигатели – не единственная инновация в области электрических силовых агрегатов. В последнее время в конвейерах все шире стали применять мотор-ролики (MDR – Motor Driven Roller). Еще два года назад на выставке оборудования по транспортировке материалов и логистике ProMat в Чикаго лишь несколько фирм представили конвейеры с приводом от мотор-роликов, зато в экспозиции в январе 2007 г. в ассортименте почти каждой фирмы, предлагающей конвейеры, были модели с мотор-роликами.
В Соединенных Штатах конвейеры с приводом от мотор-роликов впервые использовала почтовая служба. Конструкция их проста. Внутри ведущего ролика устанавливается миниатюрный электродвигатель постоянного тока, работающий от напряжения 24 В, и редуктор. В обычных конвейерах один мотор-ролик приходится на 9 обычных роликов.
По словам специалистов, если конвейер перемещает грузы непрерывным потоком, привод от наружных электродвигателей более экономичен. Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
У мотор-роликов целый «букет» преимуществ. Уровень шума от конвейеров, оснащенных мотор-роликами, значительно ниже, чем от обычных конвейеров. Они позволяют экономить энергию: не только благодаря более высокому к.п.д. мотор-роликов, но и потому, что конвейер работает только тогда, когда надо. Еще одно преимущество – более высокий уровень систем управления мотор-роликами. В настоящее время выпускаются конвейеры с мотор-роликами, развивающие скорость до 90 м/мин, а если поток грузов уменьшился, можно снизить скорость до 30 м/мин, уменьшив таким образом износ деталей конвейера и энергопотребление. Наконец, мотор-ролик практически не нуждается в техобслуживании. Поскольку он работает лишь тогда, когда надо, его ресурс продляется на годы. Когда электродвигатель выйдет из строя, мотор-ролик заменяют другим практически без остановки конвейера.
Чем отличается синхронный двигатель от асинхронного для чайников кратко, простыми словами, сравнение по конструкции и принципу действия
Электрический двигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую. Конструктивно агрегат состоит из статора (фиксирован) и ротора (вращается). Первый создает магнитный поток, а второй крутится под действием электродвижущей силы (ЭДС).
Отличие – кратко простыми словами
Если говорить кратко и простыми словами, синхронный и асинхронный двигателя отличаются конструкцией роторов. Внешне понять какой перед вам электродвигатель практически невозможно, за исключением наличия дополнительных ребер охлаждения у асинхронных электродвигателей.
В устройстве, работающем на синхронном принципе, на роторе предусмотрена обмотка с независимой подачей напряжения.
У асинхронного мотора ток на ротор не подается, а формируется с помощью магнитного статорного поля. При этом статоры обоих агрегатов идентичны по конструкции и несут аналогичную функцию — создание магнитного поля.
При этом статоры обоих агрегатов идентичны по конструкции и несут аналогичную функцию — создание магнитного поля.
Дополнительно в синхронном двигателе магнитные поля статора и ротора взаимодействуют друг с другом и имеют равную скорость.
У асинхронных агрегатов в роторных пазах имеются короткозамкнутые пластинки из металла или контактные кольца, обеспечивающие разность магнитного поля роторного и статорного механизма на величину скольжения.
Несмотря на видимую простоту, разобраться с этим вопросом сразу вряд ли получится, поэтому рассмотрим вопрос более подробно. Поговорим об особенностях и отличиях асинхронных и синхронных машин.
Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм).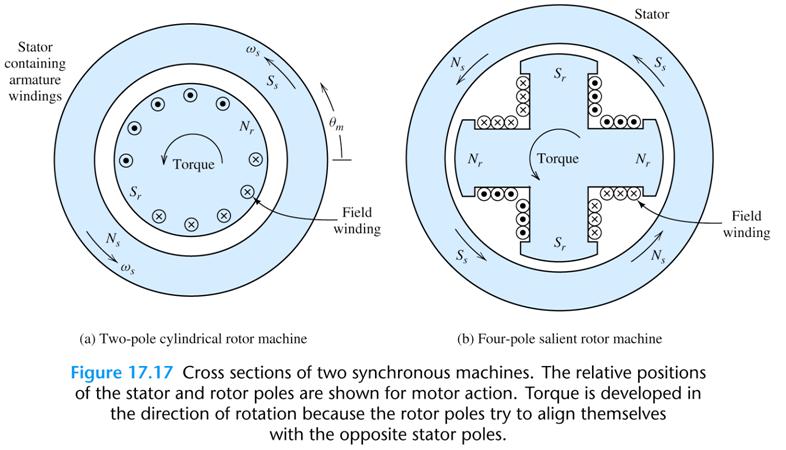 Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
Конструктивно роторы бывают разными устройством и по конструкции.
В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
 Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.
Принцип работы
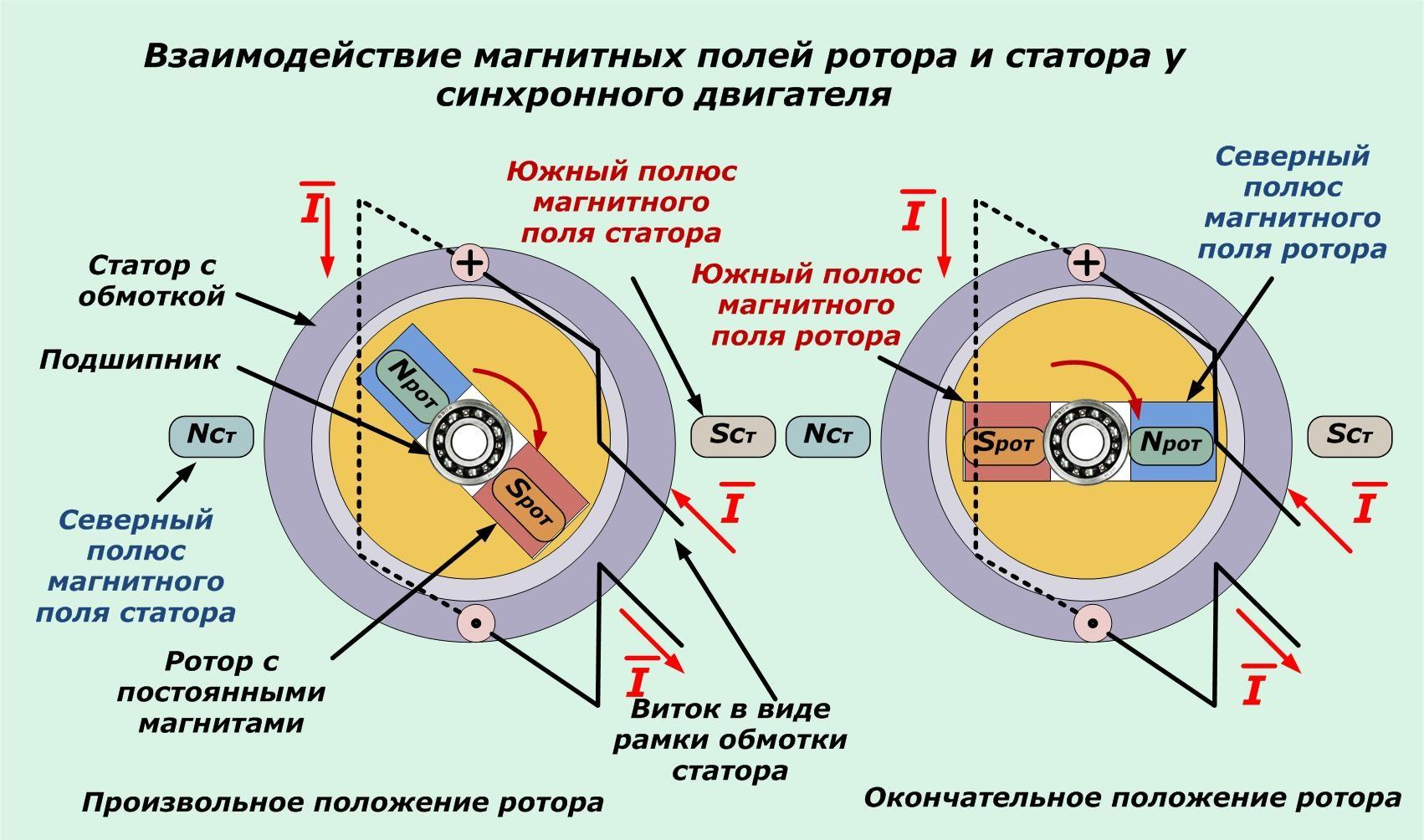
Сначала к обмоткам возбуждения подводится ток постоянно величины. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.
С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
Сфера применения
Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т. д.
 д.
д.Читайте также:
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь эля этого нужные специальные устройства: возбудитель, выпрямитель.
- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.

Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000ВАсинхронный двигатель (АД)
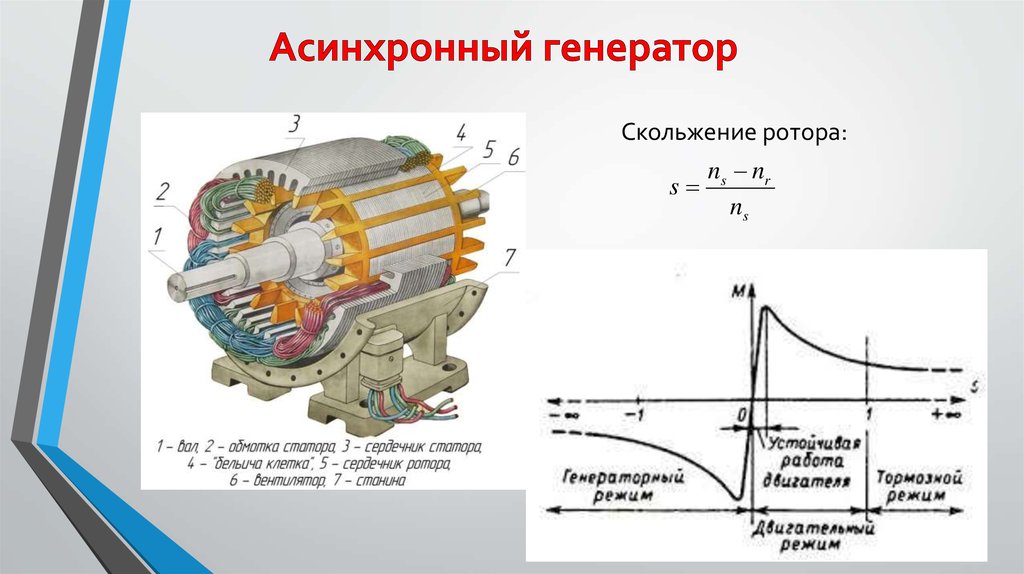
Асинхронный (индукционный) электродвигатель, имеющий разную частоту вращения магнитного поля в статоре и скорости ротора. В зависимости от типа и настройки может работать в двигательном или генераторном режиме, режиме ХХ или электромагнитного тормоза.
Конструктивные особенности
Конструктивно асинхронные механизмы трудно отличить от синхронных. Они также состоят из двух основных узлов: статора и ротора. При этом роторный узел может быть фазным или короткозамкнутым. Но небольшие конструктивные отличия все-таки имеются.
Рассмотрим, из чего состоит асинхронный двигатель:
- сердечник;
- вентилятор с корпусом;
- подшипник;
- коробка с клеммами;
- тройная обмотка;
- контактные кольца.
С учетом сказанного одним из главных отличий является отсутствие обмоток на якоре (исключением являются фазные АД). Вместо обмотки в роторе находятся стержни, закороченные между собой.
Читайте также:Принцип действия
В асинхронном двигателе магнитное поле создается, благодаря току в статорной обмотке, находящейся на специальных пазах. На роторе, как отмечалось выше, обмоток нет, а вместо них накоротко объединенные стержни. Такая особенность характерна для короткозамкнутого роторного механизма.
Во втором типе ротора (фазном) на роторе предусмотрены обмотки, ток и сопротивление которых могут регулироваться реостатным узлом.
Простыми словами, принцип действия можно разложить на несколько составляющих:
- При подаче напряжения в статоре создается магнитное поле.
- В роторе появляется ток, взаимодействующий с ЭДС статора.
- Роторный механизм вращается в том же направлении, но с отставанием (скольжением) размером от 1 до 8 процентов.
Сфера применения
Асинхронные электромоторы пользуются большим спросом в быту, благодаря простоте конструкции и надежности в эксплуатации.
Они часто применяются в бытовой аппаратуре:
- стиральных машинках;
- вентиляторе;
- вытяжке;
- бетономешалках;
- газонокосилках и т. д.
Также применяются они и в производстве, где подключаются к 3-фазной сети.
К этой категории относятся следующие механизмы:
- компрессоры;
- вентиляция;
- насосы;
- задвижки автоматического типа;
- краны и лебедки;
- станки для обработки дерева и т. д.
Асинхронные машины применяются в электрическом транспорте и других сферах. Они нашли применение в башенных кранах, лифтах и т. д.
Пример Трехфазный АИР 315S2 660В 160кВт 3000об/мин.
Преимущества и недостатки
Электродвигатель асинхронного тип имеет слабые и сильные места, о которых необходимо помнить.
Преимущества:
- Простая конструкция, которая обусловлена трехфазной схемой подключения и простым принципом действия.
- Более низкая стоимость, по сравнению с синхронным аналогом.
- Возможность прямого пуска.
- Низкое потребление энергии, что делает двигатель более экономичным.
- Высокая степень надежности, благодаря упрощенной конструкции.
- Универсальность и возможность применения в сферах, где нет необходимости в поддержке частоты вращения, или имеет место схема управления с обратной связью.
- Возможность применения при подключении к одной фазе.
- Успешный самозапуск группы АД в случае потери и последующей подачи на них напряжения.
- Минимальные расходы на эксплуатацию. Все, что требуется — периодически чистить механизма от пыли и протягивать контактные соединения. При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.
 При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.
При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.Недостатки:
- Наличие эффекта скольжения, обеспечивающего отставание вращения ротора от частоты вращения поля внутри механизма.
- Потери на тепло. Асинхронные моторы имеют свойство перегреваться, особенно при большой нагрузке. По этой причине корпус изделия делают ребристым для увеличения площади охлаждения (у СД такое применяется не на всех моделях). Дополнительно может устанавливаться вентилятор для обдува поверхности.
- Напряжение только на 220 В и выше. Из-за конструктивных особенностей такие электродвигатели не производятся для рабочего напряжения меньше 220 В. В качестве замены часто применяются гидро- или пневмоприводы.
- Небольшой КПД в момент пуска и высокая реактивность. По этой причине мотор может перегреваться уже при пуске. Это ограничивает количество пусков в определенный временной промежуток.
- Синхронная частота вращения не может быть больше 3000 об/мин, ведь в ином случае требуется использование турбированного привода или повышающего редуктора.
- Трудности регулирования устройств, которые приводятся в движение «синхронниками».
- Повышенный пусковой ток — одна из главных проблем асинхронных моторов, имеющих мощность свыше 10 кВт. В момент пуска токовая нагрузка может превышать номинальную в шесть-восемь раз и длиться до 5-10 секунд. По этой причине для «асинхронников» не рекомендуется прямое подключение.
- При появлении КЗ возле шин с работающим двигателем появляется подпитка тока.
- Чувствительность к изменениям напряжения. При отклонении этого параметра более, чем на 5% показатели электродвигателя отклоняются от номинальных. В случае снижения напряжения уменьшается момент АД.
Сравнение синхронного и асинхронного двигателей
В завершение можно подвести итог, в чем главные отличия асинхронных (АД) и синхронных (СД) моторов.
Выделим базовые моменты:
- Ротору асинхронных моторов не требуется питание по току, а индукция на полюсах зависит от статорного магнитного поля.
- Обороты АД под нагрузкой отстают на 1-8% от скорости вращения поля статора. В СД количество оборотов одинаково.
- В «синхроннике» предусмотрена обмотка возбуждения.
- Конструктивно ротор СД представляет собой магнит: постоянный, электрический. У АД магнитное поле в роторном механизме наводится с помощью индукции.
- У синхронной машины нет пускового момента, поэтому для достижения синхронизации нужен асинхронный пуск.
- «Синхронники» применяются в случаях, когда необходимо обеспечить непрерывность производственного процесса и нет необходимости частого перезапуска. АД нужны там, где требуется большой пусковой момент и имеют место частые остановки.
- СД нуждается в дополнительном источнике тока.
- «Асинхронники» медленнее изнашиваются, ведь в их конструкции нет контактных колец со щетками.
- Для АД, как правило, характерно не круглое количество оборотов, а для СД — округленное.

Про реактивную мощность
Синхронные электродвигатели генерируют и одновременно потребляют реактивную мощность. Особенности и параметры «реактива» зависит от тока в возбуждающей обмотке. При полной нагрузке косинус Фи равен 1. В таком режим СД не потребляет «реактив» из сети, а ток в статорной обмотке минимален.
Особенности и параметры «реактива» зависит от тока в возбуждающей обмотке. При полной нагрузке косинус Фи равен 1. В таком режим СД не потребляет «реактив» из сети, а ток в статорной обмотке минимален.
Здесь важно понимать, что реактивная мощность ухудшает параметры энергосистемы. Большой параметр неактивных токов приводит к повышению расхода топлива, увеличению потерь и снижению напряжения.
Кроме того, «реактив» грузит линии передач электроэнергии, что ведет к необходимости увеличения сечения кабелей и проводов, а, соответственно, повышению капитальных расходов.
Сегодня одна из главных задач энергетиков — компенсация реактивной мощности. К основным ее потребителям относят АД, потребляющие 40% «реактива», электрические печи, преобразователи, ЛЭП и силовые трансформаторы.
Читайте также:Какой лучше
При сравнении асинхронного и синхронного электродвигателей трудно ответить, какой лучше. По конструкции и надежности выигрывает АД, который при умеренной нагрузке имеет более продолжительный срок службы.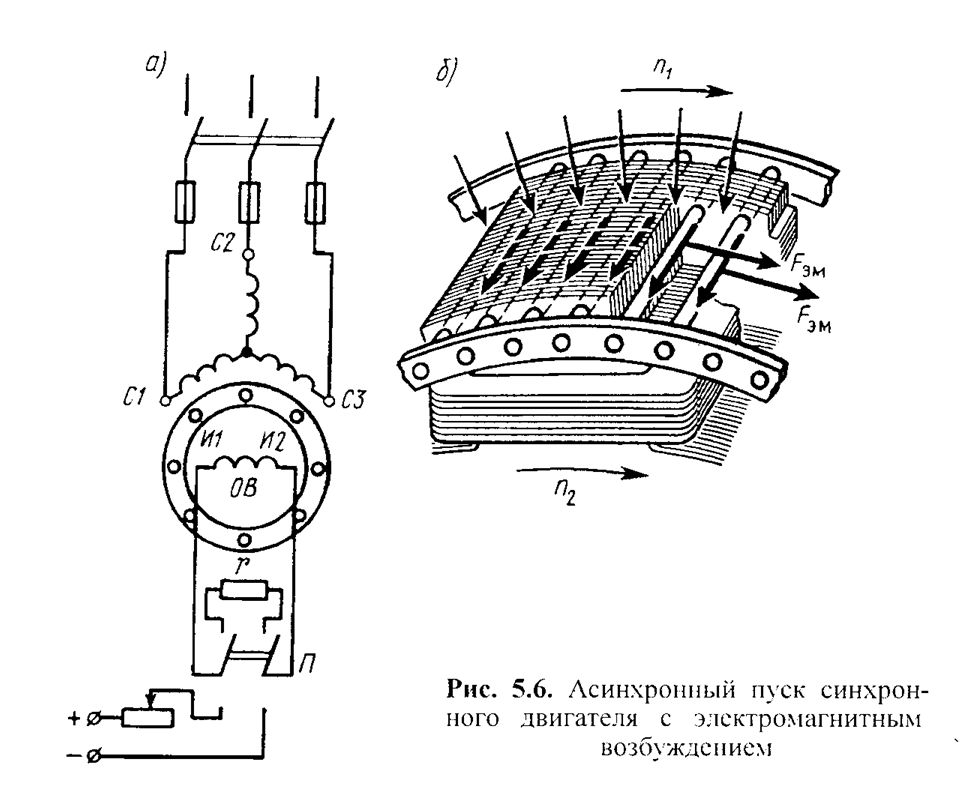 У СД щетки быстро изнашиваются, что требует их замены.
У СД щетки быстро изнашиваются, что требует их замены.
В остальном это два схожих по конструкции, но отличающихся по принципу действия механизма, имеющих индивидуальные сферы применения.
Разница между синхронным и асинхронным двигателем
Разница между синхронным и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требование к контактному кольцу и щеткам, их стоимость, эффективность, коэффициент мощности, токоподвод, скорость, самозапуск, влияние на крутящий момент, поскольку изменения напряжения, их рабочей скорости и различных применений синхронного и асинхронного двигателя. Советуем вам сайт компании zemchic.ru, перейдя по ссылке далее https://zemchic.ru/item/instrument_obmotchika_remontnika вы сможете купить инструменты обмотчика-ремонтника по выгодной цене!
Различия между синхронным и асинхронным двигателем описаны ниже в табличной форме.
| ОСНОВА | СИНХРОННЫЙ МОТОР | АСИНХРОННЫЙ МОТОР |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной. N <NS |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигатель переменного тока известен как асинхронный двигатель. |
| слип | Не имеет скольжения.Значение скольжения равно нулю. | Имейте скольжение, поэтому значение скольжения не равно нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора вблизи синхронной скорости. | Не требует никакого дополнительного исходного источника. |
| Кольцо скольжения и щетки | Требуется скользящее кольцо и щетки | Кольцо скольжения и щетки не требуются. |
| Стоимость | Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективны |
| Фактор силы | Изменяя возбуждение, коэффициент мощности можно соответственно отрегулировать как отставание, опережение или единица. | Асинхронный двигатель работает только с запаздывающим коэффициентом мощности. |
| Ток питания | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самостоятельный запуск | Синхронный двигатель не запускается самостоятельно | Это само начало |
| Влияние крутящего момента | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин. | Выше 600 об / мин скорость работы двигателя превосходна. |
| Приложения | Синхронные двигатели используются на электростанциях, в обрабатывающей промышленности и т. Д., А также в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть скорость вращения ротора равна частоте вращения статора двигателя. Это следует соотношению N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью меньше, чем синхронная скорость, т.е. N <N S
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны. Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.
- Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет проскальзывание, поэтому величина проскальзывания не равна нулю.
- Синхронный двигатель требует дополнительного источника питания постоянного тока, чтобы первоначально вращать ротор близко к синхронной скорости. Асинхронный двигатель не требует дополнительного источника запуска.
- Кольцо скольжения и щетки требуются в синхронном двигателе, тогда как асинхронный двигатель не требует кольца скольжения и щеток. Только для асинхронного двигателя намоточного типа требуются контактное кольцо и щетки.
- Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем.
- КПД синхронного двигателя выше, чем асинхронного двигателя.
- Изменяя возбуждение, коэффициент мощности Синхронного двигателя можно соответствующим образом отрегулировать как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с запаздывающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость Синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается самостоятельно, тогда как асинхронный запускается самостоятельно.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, тогда как оно влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин. Асинхронный двигатель работает превосходно. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее
- Различные применения Синхронного двигателя заключаются в том, что он используется на электростанциях, в обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
 Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.
Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.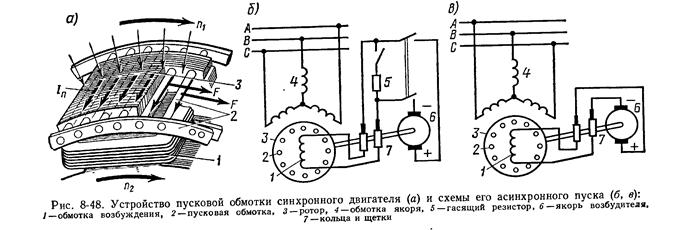
 Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее
Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далееАсинхронные и синхронные электродвигатели | Статьи компании «Мир Привода»
Главным назначением данных агрегатов является преобразование электрической энергии в механическую, что позволяет задействовать массу различных механизмов и устройств.
Чтобы понять, чем отличается синхронный электродвигатель от асинхронного аналога, нужно иметь определенное представление о работе агрегатов. В основе лежит создание индукции магнитных полюсов посредством вращающегося ротора и неподвижного статора. Датчик положения ротора посылает все необходимые данные для регуляции в соответствии с фазами напряжения.
В основе лежит создание индукции магнитных полюсов посредством вращающегося ротора и неподвижного статора. Датчик положения ротора посылает все необходимые данные для регуляции в соответствии с фазами напряжения.
Главное различие асинхронных и синхронных электродвигателей заключается в устройстве ротора, который представляет собой постоянный или электрический магнит, а если быть точнее — в принципе создания полюсов:
- при помощи индукции;
- при помощи катушек или постоянных магнитов.
Преимущества и недостатки синхронных и асинхронных электродвигателей переменного тока:
- Синхронные модели — высокая надёжность и КПД, стабильная частота вращения, не зависящая от нагрузки, простота обслуживания. Минусом можно считать некоторую сложность запуска двигателя, а также необходимость питания обмотки постоянным током. В моделях некоторых производителей часто выходят из строя коллекторы и щётки.
- Асинхронные аналоги — низкое потребление энергии, простота конструкции, эксплуатация в бытовых приборах с использованием однофазного подключения. Главный минус заключается в больших тепловых потерях и сложности регулировки.
 Главный минус заключается в больших тепловых потерях и сложности регулировки.
Главный минус заключается в больших тепловых потерях и сложности регулировки.Конструктивные особенности
Стоит обратить внимание на конструктивные отличия синхронного электродвигателя и асинхронного двигателя.
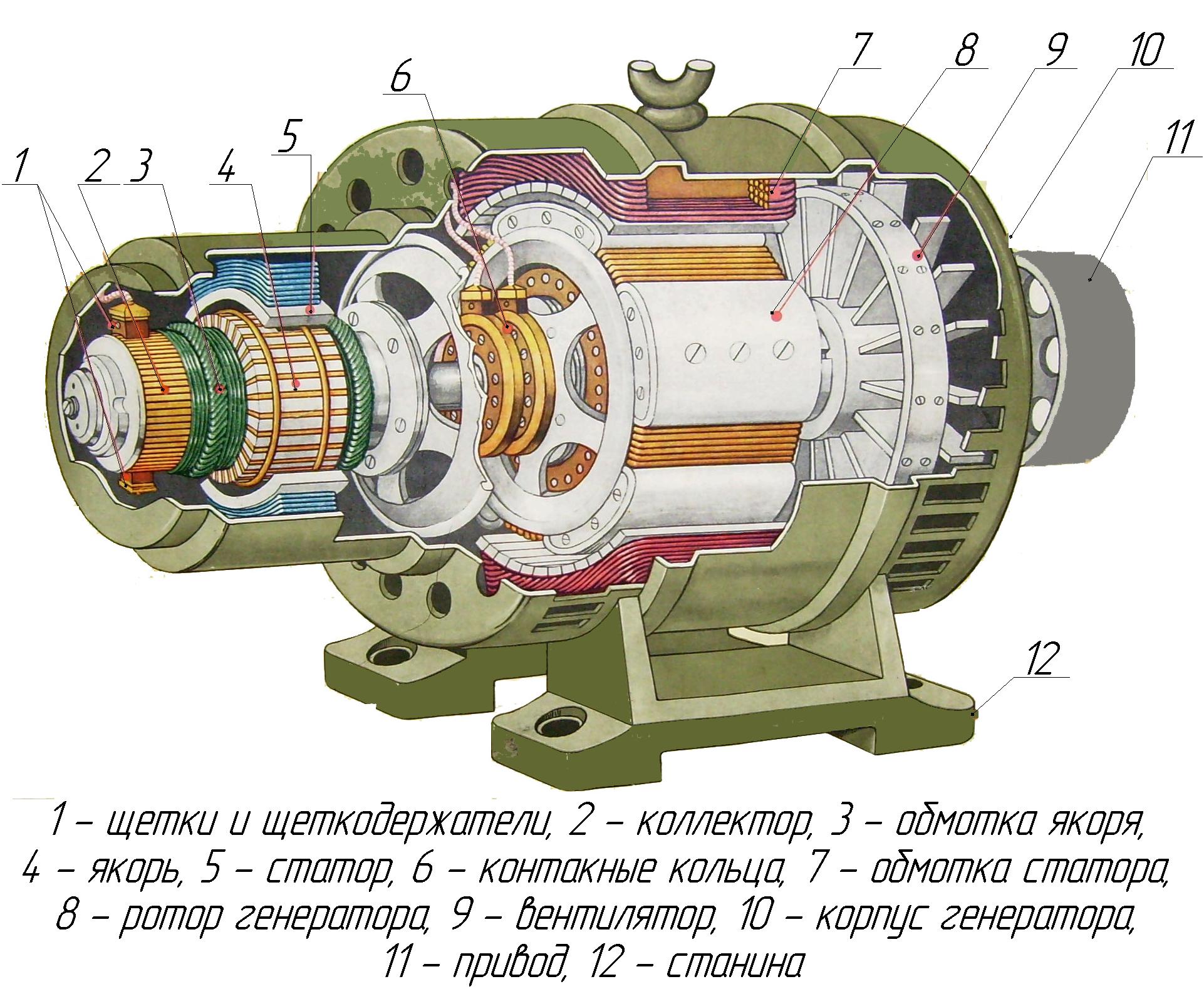
В состав синхронной конструкции, которая используется и как двигатель, и как генератор, входят следующие детали:
- подшипниковый узел;
- сердечник;
- магниты, индуктор и якорь с обмоткой;
- втулка;
- стальная тарелка.
Стоит добавить, что некоторые новые модели обладают короткозамкнутой пусковой обмоткой, которая позволяет запускать агрегат в асинхронном режиме.
Асинхронные аналоги бывают двух типов (с короткозамкнутым и фазным ротором) и состоят из следующих деталей:
- сердечника и магнитопровода;
- вентилятора с кожухом;
- подшипника;
- клеммной коробки и тройной обмотки;
- контактных колец.
Данная разновидность обладает большей популярностью, поскольку позволяет регулировать частоту вращения вала с помощью реостатов.
Разница асинхронного и синхронного двигателя
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Различия в работе и стоимости
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.

У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
 В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Достоинством синхронной модели является то, что можно легко установить высокий коэффициент мощности. Поэтому модель является гораздо более эффективной, но по цене она будет соответственно дороже. Машины применяются в системах с требуемой мощностью 100 кВт и более.
В чем различие асинхронного двигателя от синхронного
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Источник
Разница между синхронным и асинхронным двигателем
Электродвигатели бывают двух основных типов — синхронные и асинхронные. Что представляют собой те и другие?
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.
Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.
В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
Источник
Синхронный или асинхронный- вот в чем вопрос.
Асинхронный двигатель широко используется в промышленных, бытовых и коммерческих целях. Трехфазные асинхронные двигатели приходятся почти на 70% электрооборудования, используемого в промышленности. Такая техника имеет много преимуществ и относительно мало недостатков, о которых мы поговорим более детально.
Преимущества асинхронного двигателя:
- Работа асинхронного двигателя очень проста. Он способен максимально результативно функционировать в любых условиях окружающей среды. Конструкция отличается высокой надежностью и прочностью;
- Низкая ценовая планка по сравнению с другими двигателями;
- Высокая эффективность. Варьируется от 85 до 95%;
- В асинхронном двигателе отсутствуют щетки. Таким образом, в двигателе нет искр, и его можно использовать в загрязненной и опасной среде.
- Обслуживание требует меньших затрат по сравнению с двигателем постоянного тока и синхронным двигателем;
- 3-фазный асинхронный двигатель — это самозапускающийся двигатель. Таким образом, никакого специального пускового устройства или дополнительного пускового двигателя не требуется. Однако однофазные асинхронные двигатели не имеют собственного пускового момента, и для вращения используются некоторые вспомогательные устройства;
- Хорошо переносит кратковременные перегрузки;
- Изменение скорости от холостого хода до номинальной нагрузки относительно небольшое.
Недостатки асинхронного двигателя:
- Коэффициент мощности двигателя очень низок в условиях малой нагрузки;
- Отсутствие возможности контролировать частоту вращения ротора без потери мощности;
- Однофазный асинхронный двигатель не запускается самостоятельно, требуется вспомогательное оборудование;
- Двигатель не может использоваться в таких условиях, где необходим высокий пусковой момент, поскольку пусковой момент очень мал по сравнению с другими машинами.
Источник
Чем отличается синхронный двигатель от асинхронного
Двигатель является устройством, преобразующим энергию в механический тип работы. Только зная функции и технические характеристики мотора, можно правильно резюмировать, чем отличается синхронный двигатель от асинхронного вида устройства.
Принцип работы синхронных и асинхронных моторов
Функционирование синхронных электродвигателей базируется на взаимодействии полюсов статора и индуктора. В пусковой момент происходит ускорение мотора до показателей вращательной скорости магнитного потока. В таких условиях устройство действует в синхронном режиме, а магнитными полями образуется особое пересечение, в результате чего происходит синхронизация.
Синхронный двигатель в разрезе
Асинхронные моторы имеют частоту роторного вращения, отличную от частоты, с которой вращается магнитное поле, создаваемое в результате действия питающего напряжения. Такие двигатели не обладают автоматической регулировкой токового возбуждения.
Асинхронный двигатель в разрезе
Основные отличия
Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.
Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.
Такие устройства относятся к категории современных двигателей, обладающих высоким КПД и постоянной частотой вращения. Асинхронные моторы сложнее регулировать, а их коэффициент полезного действия недостаточно высокий. Тем не менее, второй вариант более доступен по цене.
Источник
Чем отличается синхронный от асинхронного электродвигателя
В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
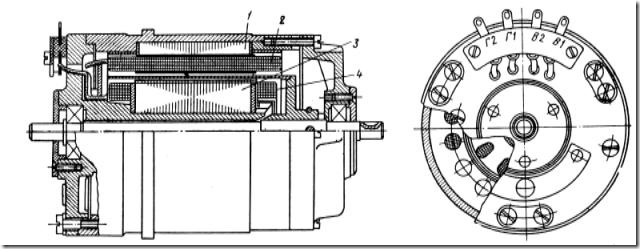
1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.
Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И на справочной табличке мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты. Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах – выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор. Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают – и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
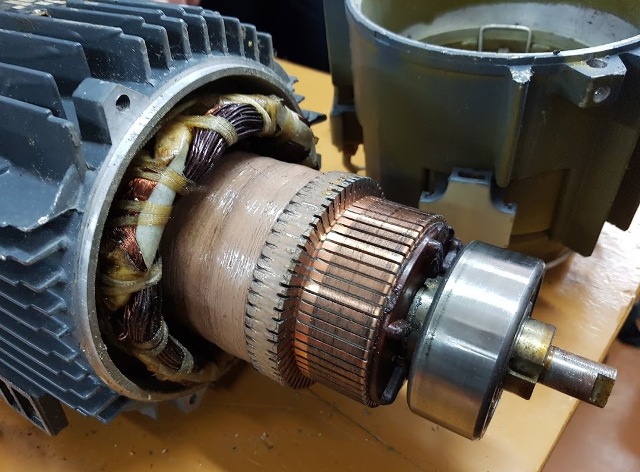
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора – мотор болгарки).
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), названный беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться.Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает протекание тока в обмотках статора.Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные отношения.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение, s, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № м
, где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток, Веберс.Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателейСинхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Существует два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам работы асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем, содержит ротор, отлитый из стали, который имеет выемки или зубцы, называемые выступающими полюсами.Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы перемещать ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, что заставляет значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть магнитного потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, содержащих роторы, несущие проводники.Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электродвигатели — это машины, которые преобразуют электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть предназначены для работы на переменном (AC) или постоянном (DC) токе. Двигатели переменного тока подразделяются на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторые общие черты, например, в конструкции, но совершенно разные по принципу действия и производительности.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и то, как они работают. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, относящуюся к работе однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу магнитного поля, действующего на проводник с током, который испытывает механическую силу.Где статор генерирует статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея вращательного магнитного поля RMF. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче входного переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, проводит ток либо посредством индукции, либо от внешнего источника тока, генерирующего собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью возбуждения статора и ротором, двигатель называется асинхронным двигателем.Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателях BLDC (бесщеточный постоянного тока), шаговых двигателях и серводвигателях.
Связанные сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его вращающееся магнитное поле статора, называемой синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован для создания собственного магнитного поля с использованием внешнего источника постоянного тока через контактные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных полюсам статора или целых кратных полюсов. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется с вращающимся магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не запускается сразу с синхронной скоростью (вращательное магнитное поле).Поэтому для обеспечения пускового момента используется дополнительная обмотка, называемая « демпферная обмотка ». Во время запуска он действует как асинхронный двигатель. Таким образом, предполагается, что синхронные двигатели не самозапускающиеся , им нужен дополнительный пусковой механизм.
Это может быть двигатель с раздельным возбуждением или без возбуждения, т.е. первый требует отдельного источника постоянного тока, возбуждает обмотки ротора и генерирует магнитное поле, в то время как последний описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора. и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты питания и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменять скорость синхронного двигателя, необходимо изменять частоту питания. Это достигается за счет использования частотно-регулируемого привода (VFD).
Связанные сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между его скоростью статора и ротора.
Ротор асинхронного двигателя представляет собой короткозамкнутый ротор или ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на конце проводящим кольцом, которое электрически закорачивает их вместе. Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его порождает, и пытается устранить ее, догоняя скорость статора RMF (синхронную скорость). При этом ротор вращается в направлении RMF статора. Асинхронный двигатель , так как он работает по принципу индукции, также известен как асинхронный двигатель .
Асинхронный двигатель никогда не может работать на синхронной скорости, вместо этого она всегда ниже, чем синхронная скорость, и это зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если в случае, если он работает с синхронной скоростью, это означает, что ротор магнитно заблокирован и между полем статора и ротора нет разницы. Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет наведенному току проходить через медные шины. В то время как заведенный ротор позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Пускателе двигателя». Дело в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного подключения переменного резистора к обмоткам ротора с помощью контактных колец.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое изменяется в зависимости от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанное сообщение:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (индукционным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель — это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
| Он работает по принципу магнитной блокировки между полем ротора и статора. | Он работает по принципу электромагнитной индукции между статором и ротором. |
| Нет скольжения, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе есть скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты питания и количество полюсов статора. Н с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1 с) N |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускаются и не требуют дополнительных механизмов. |
| Ротор требует дополнительного источника тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронному двигателю с независимым возбуждением требуется дополнительный источник постоянного тока для питания обмотки ротора. | Не требует дополнительных источников. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Он не требует контактных колец, однако намотанный тип может использовать контактные кольца для управления скоростью. |
| Скорость двигателя регулируется только путем изменения частоты питания с помощью частотно-регулируемого привода. | Скорость двигателя можно регулировать, используя переменное сопротивление ротора, а также устройства частотно-регулируемого привода. |
| Источник входного напряжения не изменяет скорость или крутящий момент синхронного двигателя. | Источник входного напряжения можно использовать для изменения крутящего момента и скорости двигателя. |
| Колебания основного напряжения питания не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Начальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Операция сложная. | Операция проста и удобна. |
| Если предлагают высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью частотно-регулируемого привода. | Работать на малой скорости довольно сложно. |
| Лучше всего работает на более низких оборотах, обычно ниже 300 об / мин. | Лучше всего подходит для работы на скорости выше 600 об / мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности, регулируя его возбуждение. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Его также можно одновременно использовать для коррекции коэффициента мощности, используя его в качестве опережающего коэффициента мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, резкое изменение нагрузки вызовет колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая при этом функцию коррекции коэффициента мощности. С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
Связанный пост об электрических двигателях.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточно-коммутаторного переключателя.Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
.N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машине. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы. В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраиваются специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
В двигателе с гистерезисом используется широкая петля гистерезиса в высококоэрцитивном роторе из кобальтовой стали.Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора.Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.Компьютер управляет последовательным включением питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается.Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, содержащих роторы, несущие проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока можно разделить на две основные категории — (i) синхронный двигатель и (ii) асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга.Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.Конструктивная разница
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Обычно используется ротор с явнополюсным ротором, на котором установлена обмотка ротора. Обмотка ротора запитана постоянным током с помощью контактных колец. Также можно использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя.Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
Разница в работе
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Нс) при питании от трехфазного источника питания.Ротор питается от источника постоянного тока. Во время пуска ротор необходимо вращать со скоростью, близкой к синхронной. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т.е. Фактическая скорость = Синхронная скорость
или N = Ns = 120f / P - Подробнее о работе синхронного двигателя здесь.
- Асинхронный двигатель : Когда на статор подается двух- или трехфазное питание переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором.Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
Прочие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки необходимы в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронного двигателя с обмоткой, в котором двигатели с контактным кольцом используются для добавления внешнего сопротивления обмотке ротора).
- Синхронным двигателям требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя может быть отрегулирован на отстающий, единичный или опережающий, изменяя возбуждение, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели обычно более эффективны, чем асинхронные.
- Синхронные двигатели дороже.
▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путают термины «синхронные» и «асинхронные двигатели» и их применение. Именно поэтому один из новейших членов сообщества электротехники написал эту статью. Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и чего можно достичь с помощью каждого из этих двигателей.
Давайте сначала сконцентрируемся на их принципах работы…
Синхронные и асинхронные двигатели — принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный развивать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле.Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление и положение вращения ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не вращаться совсем.
Асинхронные двигатели
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель.Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Единственная загвоздка в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора.Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «проскальзывание».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью и заданной частотой независимо от нагрузки. Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздыванием p.f, который может быть очень низким при уменьшении нагрузок.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя.
- Синхронные двигатели особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — применение
Приложения для синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для преодоления запаздывающей p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях. Вот некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Подъемники, а также краны большой грузоподъемности
- Станки токарные
- Масляные, текстильные, бумажные комбинаты и т. Д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются характеристики низкой или сверхнизкой скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). Принимая во внимание, что асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора.
Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость.
Синхронный двигатель не имеет скольжения.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением. В случае синхронного двигателя его обмотка якоря питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока, тогда как в случае асинхронного двигателя его обмотка статора питается от источника переменного тока.
В чем разница между синхронным и асинхронным генератором?
Как и следовало ожидать из названия, основное различие между асинхронными и синхронными машинами заключается в синхронизме ротора. Когда ротор вращается медленнее, чем синхронная скорость, машина действует как двигатель. Когда ротор вращается быстрее, чем синхронная скорость, машина действует как генератор.
Что такое синхронный двигатель?
Синхронный электродвигатель — это электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока.Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.
Что такое синхронная скорость?
В двигателе синхронная скорость — это скорость, с которой вращается магнитное поле. В зависимости от конструкции двигателя фактическая механическая скорость может быть эквивалентной (синхронный двигатель) или немного меньшей (асинхронный двигатель). Синхронная скорость является функцией: используемой электрической частоты, обычно 60 Гц или 50 Гц.
Почему он называется синхронным двигателем?
Следовательно, ротор вращается с той же скоростью, что и вращающееся магнитное поле.Это связано с тем, что двигатель называется синхронным двигателем. Это двигатель с постоянной скоростью, потому что, несмотря на увеличение нагрузки, двигатель работает с той же синхронной скоростью.
Какие типы двигателей?
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
- Бесщеточные двигатели переменного тока. Бесщеточные двигатели переменного тока — одни из самых популярных в управлении движением.
- Электродвигатели постоянного тока с щеткой. В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток.
- Бесщеточные двигатели постоянного тока.
- Прямой привод.
- Линейные двигатели.
- Серводвигатели.
- Шаговые двигатели.
Что означает синхронный генератор?
синхронный генератор. [′ Siŋ · krə · nəs ′ jen · ə‚rād · ər] (электричество) Машина, которая генерирует переменное напряжение, когда ее якорь или поле вращаются двигателем, двигателем или другими средствами. Выходная частота точно пропорциональна до скорости, с которой работает генератор.
Почему мы используем синхронный генератор?
Синхронные генераторы являются основным источником коммерческой электроэнергии. Они обычно используются для преобразования механической мощности паровых турбин, газовых турбин, поршневых двигателей и гидротурбин в электрическую энергию для сети. Нагрузка, подаваемая генератором, определяет напряжение.
Как работает синхронный генератор?
Принцип действия синхронного генератора — электромагнитная индукция.Если существует относительное движение между потоком и проводниками, то в проводниках индуцируется ЭДС. Таким образом, теперь можно сказать, что касательное движение проводника перпендикулярно линиям магнитного потока от северного полюса к южному.
Почему возбуждение всегда постоянное?
Для успешной работы генератора он должен выдавать синусоидальное переменное напряжение определенной частоты. Теперь возбуждение постоянным током создает электромагнит фиксированной полярности в поле, которое движется с постоянной скоростью от первичного двигателя.Таким образом, якорь статора создает почти синусоидальный переменный ток.
Каковы преимущества синхронного двигателя?
Преимущество использования синхронного двигателя — возможность контролировать коэффициент мощности. Синхронный двигатель с избыточным возбуждением имеет опережающий коэффициент мощности и работает параллельно с асинхронными двигателями, тем самым улучшая коэффициент мощности системы. Скорость остается постоянной независимо от нагрузки в синхронных двигателях.
Где используется синхронный двигатель?
Обычно синхронные двигатели используются в приложениях, где требуется точная и постоянная скорость.Эти двигатели с низким энергопотреблением включают в себя позиционирующие машины. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели.
Синхронные двигатели и асинхронные двигатели
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя — это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории: двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания.Тем не менее, обе эти категории по-прежнему содержат много типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (в нашей статье о бесщеточных и щеточных двигателях постоянного тока рассматриваются основные типы двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные и асинхронные двигатели, и в этой статье дается краткое объяснение обоих, а также сравниваются их рабочие характеристики и области применения.
Двигатели асинхронные
Асинхронные двигателисчитаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности.Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции для создания механического вращения. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей — пропускать переменный ток через катушки в статоре, которые создают магнитное поле, а частота колебаний источника переменного тока заставляет это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует количеству оборотов выходного вала.Это явление известно как «проскальзывание» и происходит потому, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие проскальзывания означает, что точное время для асинхронных двигателей затруднено. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они бывают сотнями скоростей, крутящих моментов, напряжений, размеров и форм. Дополнительные сведения об этих машинах см. В нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя, как правило, дороже асинхронных двигателей, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье дается общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
Характеристики | Асинхронные двигатели | Двигатели синхронные |
Сложность | Простой дизайн | Комплекс |
Самозапускающийся | В целом да | Обычно нет |
Плотность мощности | Среднее значение | Высокая |
Эффективность | Среднее значение | Высокая |
Контроль коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокая |
Сложность (или ее отсутствие) асинхронных двигателей — лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные — нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности — это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя над асинхронным.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает, что при преобразовании электрической энергии в механическую энергию теряется меньше энергии.
Коэффициент мощности — это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электросчетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели работают в паре с асинхронными двигателями, чтобы скорректировать индуктивные потери мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, описанным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Сводка
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/