
Расчет трехфазного синхронного двигателя. Номинальное фазное напряжение
Расчет трехфазного синхронного двигателя
Проектное задание:
1. Номинальная мощность 
2. Номинальное напряжение (линейное) 
3. Номинальная частота вращения 
4. Частота 
5. 
6. Кратность максимального момента 
Режим работы — продолжительный.
Номинальные величины
1. Номинальное фазное напряжение (предполагается, что обмотка статора соединена в звезду)
2. Номинальная полная мощность

 исходя из
номинальных данных машины
исходя из
номинальных данных машины
3. Номинальный фазный ток
4. Число пар полюсов
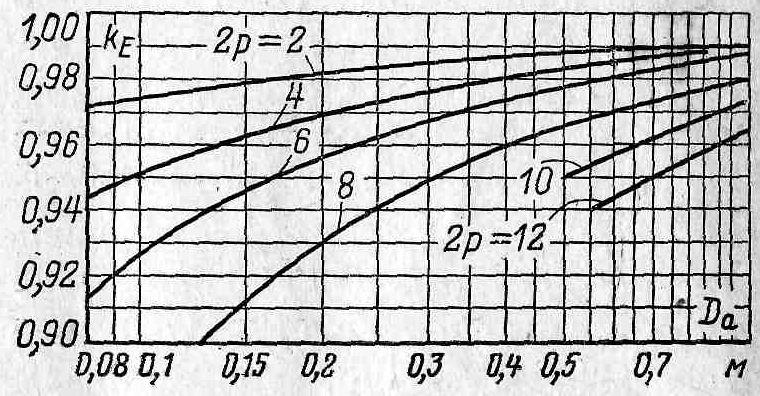
5. Расчетная мощность

 -коэффициент
представляющий собой отношение ЭДС в якоре при номинальной нагрузке к
номинальному напряжению. При работе синхронного двигателя с опережающим током и
можно принять
-коэффициент
представляющий собой отношение ЭДС в якоре при номинальной нагрузке к
номинальному напряжению. При работе синхронного двигателя с опережающим током и
можно принять 
Размер статора
6. Графическим методом предварительно определяем внутренний диаметр
статора для  при
при 
7. Внешний диаметр статора

 -имеет значение в
зависимости от числа полюсов
-имеет значение в
зависимости от числа полюсов
По табличным данным выбираем ближайший нормализованный внешний диаметр статора(Габарит №11):

8. Полюсное деление
9. Расчетная длина статора. По графикам для  при р=3 находим
при р=3 находим  . Задаемся:
. Задаемся: 


 — обмоточный
коэффициент. Определяется предварительно
— обмоточный
коэффициент. Определяется предварительно  , что соответствует
шагу обмотки
, что соответствует
шагу обмотки 
10. Находим 
— удовлетворяет
заданному промежутку значений при р=3
11. Действительная длина статора

12. Число вентиляционных каналов при 

Из этого предела
выбираем целое значение 
13. Длина пакета

14. Суммарная длина пакетов магнитопровода

Зубцовая зона статора.
15. Число параллельных ветвей обмотки статора.
Так как  ,
то выбираем
,
то выбираем 
16. По графику для находим

17. Максимальное число пазов (зубцов) магнитопровода статора
18. Минимальное число пазов (зубцов) магнитопровода статора
19. Число пазов магнитопровода статора
Так как  то сердечник
выполняется не сегментированным
то сердечник
выполняется не сегментированным
Выберем значение Z1 из заданного промежутка Z1min…Z1max, чтобы удовлетворяла условиям:
а) Z1 должно быть кратным числу фаз m и числу параллельных ветвей а б)  должно быть целым
или дробным вида
должно быть целым
или дробным вида  , причем d не может быть кратное числу фаз и должно быть меньше числа пар полюсов в) число
параллельных ветвей и число полюсов должны быть связаны следующим соотношениям:
, причем d не может быть кратное числу фаз и должно быть меньше числа пар полюсов в) число
параллельных ветвей и число полюсов должны быть связаны следующим соотношениям:
— при дробном
числе пазов на полюс и фазу  -
целое число
-
целое число
-при целом числе
пазов на полюс и фазу 
Выберем Z1=54
При этом 
20. Расчет числа проводников в пазу 

Уточненная линейная нагрузка

Пазы и обмотка статора
21. Ширина паза (предварительно)

22. Поперечное сечение эффективного проводника обмотки статора (предварительно)

где

23. Возможная ширина изолированного проводника

Изоляция катушек
выбрани для класса нагревостойкости «В». Двусторонняя толщина изоляции 
Предварительная ширина элементарного проводника с изоляцией
24. Размеры проводников обмотки статора. Принимаем,
что эффективный проводник состоит из двух элементарных.( ) Марка провода ПСД
с толщиной двухсторонней изоляции 0,33. Толщина изоляции элементарного
проводника 0,05. Ширина голого прямоугольного проводника
) Марка провода ПСД
с толщиной двухсторонней изоляции 0,33. Толщина изоляции элементарного
проводника 0,05. Ширина голого прямоугольного проводника  . Ширина голого
элементарного проводника
. Ширина голого
элементарного проводника 
Выберем
стандартные значения  и
и  равные
равные  .
.

25. Ширина паза

 — допуски на
разбухание изоляции
— допуски на
разбухание изоляции
 — технологические
допуски на укладку
— технологические
допуски на укладку
26. Высота паза

 — суммарная толщина
изоляции по высоте паза
— суммарная толщина
изоляции по высоте паза
 — высота клина
— высота клина
 -
допуски на разбухание изоляции
-
допуски на разбухание изоляции
 — технологические
допуски на укладку
— технологические
допуски на укладку
Эскиз паза изображен на рис.1 в масштабе 4:1
рис.1
Спецификация паза:
|
Наименование |
Число слоев |
Толщина,мм |
|||
|
по шир. |
по выс. |
по шир. |
по выс. |
||
|
1 |
Провод ПСД 2,65*4(3,03*8,43) |
1 |
9 |
8,43 |
30,3 |
|
2 |
Лента стеклослюдинитовая ЛС 0.13мм |
3 |
впол нахлеста |
2,00 |
2 |
|
3 |
Лента стеклянная ЛЭС (покровная) 0.1мм |
1 |
встык |
0.2 |
0.2 |
|
Двусторонняя толщина изоляции одной катушки |
— |
— |
2,20 |
2,2 |
|
|
4 |
Стеклотекстолит СТ1 толщиной 1мм |
— |
2 |
— |
2 |
|
5 |
Стеклотекстолит СТ1 толщиной 0.5мм |
— |
2 |
— |
1 |
|
Общая толщина изоляции на паз |
— |
— |
2,20 |
7,40 |
|
|
Разбухание изоляции |
— |
— |
0,10 |
0,45 |
|
|
Допуск на укладку |
— |
— |
0,20 |
0,2 |
|
|
6 |
Клин |
— |
— |
— |
5 |
|
Всего |
— |
— |
10,93 |
43,35 |
27. Уточненное значение плотности тока в проводнике обмотки статора

28. Проверка индукции в зубце статора (приближенно)

 — коэффициент
заполнения пакета для лакированных листов толщиной
— коэффициент
заполнения пакета для лакированных листов толщиной 
29. Проверка индукции в ярме статора (приближенно)

 — расчетный
коэффициент полюсного перекрытия
— расчетный
коэффициент полюсного перекрытия

 и
и  находятся в
допустимых пределах
находятся в
допустимых пределах
30. Перепад температуры в изоляции паза
 -теплопроводность изоляции
– для изоляции, выполненной по способу «монолит»,
-теплопроводность изоляции
– для изоляции, выполненной по способу «монолит», 
 -коэффициент
добавочных потерь
-коэффициент
добавочных потерь
31. Градиент температуры в изоляции паза

32. Витки фазы обмотки статора

33. Шаг обмотки
где

34. Коэффициент укорочения шага

35. Коэффициент распределения обмотки статора
36. Обмоточный коэффициент

Воздушный зазор и полюсы ротора
37. Исходя из заданного из заданного отношения  по графику находим
по графику находим 
Приближенное значение воздушного зазора

где

38. Принимаем воздушный зазор под серединой полюса равным  (3,5мм). Зазор над
краями полюса
(3,5мм). Зазор над
краями полюса 

39. Ширина полюсного наконечника определяется

 — коэффициент
полюсного перекрытия(конструктивный)
— коэффициент
полюсного перекрытия(конструктивный)
40. Радиус дуги полюсного наконечника

41. Высота полюсного наконечника при

42. Длина сердечника полюса и полюсного наконечника

43. Расчетная длина сердечника полюса. Принимаем 

 — толщина одной
нажимной щеки полюса
— толщина одной
нажимной щеки полюса
44. Предварительная высота полюсного сердечника

45. Коэффициент рассеяния полюсов находится

 — коэффициент,
зависящий от высоты полюсного наконечника
— коэффициент,
зависящий от высоты полюсного наконечника
46. Ширина полюсного сердечника определяется

 — коэффициент заполнения
полюса сталью толщиной 0,5 [мм]
— коэффициент заполнения
полюса сталью толщиной 0,5 [мм]
Так как
 , то принимаем
крепление полюсов шпильками к ободу магнитного колеса.
, то принимаем
крепление полюсов шпильками к ободу магнитного колеса.
47. Длина ярма (обода) ротора

 — для средних машин
— для средних машин
48. Минимальная высота ярма ротора

Принимаем  ; hj
уточняем по чертежу.
; hj
уточняем по чертежу.
Пусковая обмотка
49. Число стержней пусковой обмотки на полюс

50. Поперечное сечение стержня пусковой обмотки

51. Диаметр стержня, материал стержня – медь;

Выбираем  , тогда
, тогда 
52. Зубцовый шаг на роторе. Принимаем 

53. Проверяем условие


Пазы ротора круглые, полузакрытые.
54. Диаметр паза ротора

Раскрытие паза 
55. Длина стержня

56. Сечение короткозамыкающегося сегмента

По таблице выбираем
прямоугольную медь 
Расчет магнитной цепи
Для магнитопровода
статора выбираем сталь марки 1511 толщиной 0,5 мм. Полюсы ротора выполняются из
стали марки Ст3 толщиной 0,5. Крепление полюсов к ободу магнитного колеса
осуществляется с помощью шпилек и гаек. Толщина обода (ярма ротора) принимают 
57. Магнитный поток в зазоре

При  и
и  находим
находим  и
и 
58. Уточненное значение расчетной длины статора

где


59. Индукция в воздушном зазоре, [Тл],

60. Коэффициент воздушного зазора статора

61. Коэффициент воздушного зазора ротора

62. Коэффициент воздушного зазора

63. Магнитное напряжение воздушного зазора,[А],

64. Ширина зубца статора на высоте 1/3hП1 от его коронки


65. Индукция в сечении зубца на высоте 1/3hП1, [Тл],

66. Магнитное напряжение зубцов статора, [А],

67. Индукция в спинке статора, [Тл],

68. Магнитное напряжение спинки статора, [А],


69. Высота зубца ротора

70. Ширина зубца ротора по высоте 1/3hП1 от его коронки
71. Индукция в зубце ротора, [Тл],

72. Магнитное напряжение зубцов ротора, [А],

73. Удельная магнитная проводимость рассеяния между внутренними поверхностями сердечника полюсов
74. Удельная магнитная проводимость между внутренними поверхностями полюсных наконечников
где
75. Удельная магнитная проводимость рассеяния между торцевыми поверхностями

76. Удельная магнитная проводимость для потока рассеяния

77. Магнитное напряжение ярма статора, зазора и зубцов полюсного наконечникa, [А],

78. Поток рассеяния полюса, [Вб],

79. Поток в сечении полюса у его основания, [Вб],

80. Индукция в полюсе, [Тл],

81. Магнитное напряжение полюса, [A],

где:

 расчетная длина
силовой линии в полюсе, м;
расчетная длина
силовой линии в полюсе, м;
82. Магнитное напряжение стыка между полюсом и ярмом ротора, [A],
83. Индукция в ободе магнитного колеса (ярме ротора), [Тл],

84. Магнитное напряжение в ободе магнитного колеса, [A],

где:

85. Сумма магнитных напряжений сердечника полюса, ярма ротора и стыка между полюсом и ярмом, [A],

86. Сумма магнитных напряжений всех участков магнитной цепи
Глава 11.
РАСЧЕТ СИНХРОННЫХ МАШИН
§ 11-1. Единые серии синхронных машин
Общие сведения. Синхронные машины применяют во многих отраслях народного хозяйства, в частности, в качестве генератора в передвижных и стационарных электрических станциях, двигателей в установках, не требующих регулирования частоты вращения или нуждающихся в постоянной частоте вращения.
Наиболее распространена конструктивная схема синхронной машины с вращающимся ротором, на котором расположены явновыраженные полюсы. Иногда явноолюсные синхронные машины малой мощности (до 15 кВт) выполняют по конструктивной схеме машин постоянного тока, т. е. с полюсами, расположенными на статоре, заменяется контактными кольцами. Сейчас отечественная промышленность выпускает несколько общепромышленных и специальных серий синхронных машин.
Серия
ЕСС. Трехфазные синхронные генераторы серии
ЕСС изготовляют мощностью от 5 до 50 кВт
при высоте оси вращения  мм, в защищенном исполненииIР23,
с самовентиляцией IС01, с частотой вращения
1500 об/мин. Эти генераторы предназначены
для продолжительного режима работы в
передвижных и стационарных электроустановках
и в качестве источников трехфазного
переменного тока напряжением 230 и 400 В,
с частотой 50 Гц, с коэффициентом мощности,
равным 0,8 (при отстающем токе), в условиях
умеренного или тропического климата.
мм, в защищенном исполненииIР23,
с самовентиляцией IС01, с частотой вращения
1500 об/мин. Эти генераторы предназначены
для продолжительного режима работы в
передвижных и стационарных электроустановках
и в качестве источников трехфазного
переменного тока напряжением 230 и 400 В,
с частотой 50 Гц, с коэффициентом мощности,
равным 0,8 (при отстающем токе), в условиях
умеренного или тропического климата.
Генераторы
серии ЕСС выполняют явнополюсными с
самовозбуждением через полупроводниковые
выпрямители и снабжают аппаратурой для
автоматического регулирования напряжения,
которая состоят из блока регулирования
напряжения, корректора и потенциометра
установки. Эта аппаратура обеспечивает
точность поддержания напряжения на
зажимах в пределах ±2% от среднерегулируемого
значения при изменении нагрузки от нуля
до номинальной величины и коэффициенте
мощности в пределах от 1,0 до 0,8, при
отклонении частоты вращения первичного
двигателя от номинальной величины не
более ±3 % и при неизменной нагрузке не
более ±1 %. Схема регулирования позволяет
изменять установку напряжения в пределах
от 100 до 95%  .
.
Генераторы допускают 10% — ную перегрузку по мощности в течение одного часа при номинальных значениях напряжения и коэффициента мощности; на х. х. обеспечивают пуск ненагруженного асинхронного двигателя, номинальная мощность которого не превышает 70% мощности генератора, при снижении напряжения, не превышающем 50% от номинального значения. Нагревостойкость изоляционных материалов генераторов соответствует классу В; система вентиляции — аксиальная вытяжная. Приводными двигателями генераторов серии ЕСС могут служить дизельные, карбюраторные, газогенераторные и электрические двигатели, а также локомобили. Вращение передается через упругую муфту или клиноременную передачу.
Серии СД2 и СГ2. Синхронные двигатели серии СД2 и генераторы серии СГ2 изготовляют мощностью от 132 до 1000 кВт, при высоте оси вращения 450 мм, в защищенном исполнении IP23, с самовентиляцией IC01, с частотой вращения от 500 до 1500 об/мин.
Двигатели используют для привода механизмов, не требующих регулирования частоты вращения (насосов, вентиляторов и др.), и изготовляют на напряжения 380 и 6000 В, при частоте 50 и 60 Гц. Генераторы предназначены для выработки трехфазного переменного тока, напряжением 400 В, частотой 50 Гц на стационарных дизель-электрических станциях.
Электрические машины серий СД2 и СГ2 рассчитаны на продолжительный режим работы. Их возбуждение осуществляется от устройства, питающегося от дополнительной обмотки, заложенной в пазы статора. Нагревостойкость изоляционных материалов соответствует классу В. Ток возбуждения регулируют изменением угла зажигания тиристоров преобразователя возбудительного устройства. Последние смонтированы в шкафах: в одном для двигателя и в двух для генератора. В шкафах размещены тиристорные преобразователи, элементы электронной системы управления, коммутационная аппаратура. Система управления двигателя осуществляет автоматическую подачу возбуждения в процессе пуска при спадании тока статора до установленной величины, а также обеспечивает форсировку возбуждения при падении напряжения в главной цепи двигателя до 80—85% номинального. Отключается форсировка при увеличении напряжения сети до 90—95% номинального значения.
Обмотка возбуждения синхронного генератора получает выпрямленный ток через тиристорный и диодный преобразователи, соединенные параллельно на стороне выпрямленного тока. Тиристорный преобразователь питается от дополнительной обмотки, заложенной в пазы статора синхронного генератора, и в номинальном режиме работы генератора несет на себе около 30% нагрузки возбуждения. Остальную часть мощности возбуждения обеспечивает диодный преобразователь, питаемый от компаундирующего трансформатора, включенного в цепь статора, который служит для поддержания напряжения генератора при изменении нагрузки и в режиме короткого замыкания. Двигатели и генераторы имеют радиальную систему вентиляции, обеспечиваемую вентиляционным действием полюсов ротора и вентиляционными лопатками. Охлаждающий воздух при этом входит через вентиляционные окна в подшипниковых щитах, проходит по лобовым частям обмотки статора, через междуполюсное пространство ротора, радиальные каналы статора и выходит через боковые жалюзи станины.
Двигатели и генераторы допускают правое и левое направление вращения. Двигатели рассчитаны на прямой пуск при номинальном напряжении сети и допускают два пуска подряд из холодного состояния и один из нагретого.
§ 11-2. Исходные данные для проектирования.
Для проектирования синхронных машин должны быть заданы следующие исходные данные: 1. Назначение — генератор или двигатель. 2. Номинальный режим работы по ГОСТ I83. 3. Номинальная отдаваемая мощность по ГОСТ 12139. 4. Количество фаз статора. 5. Способ соединения фаз статора (λ;Δ). 6. Частота напряжения 7. Коэффициент мощности по ГОСТ 20550, 22407, ГОСТ 18200. 8. Номинальное линейное напряжение по ГОСТ 21128. 9. Частота вращения по ГОСТ 10683. 10. Способ возбуждения. 11. Степень защиты от внешних воздействий по СТ 247. 12. Способ охлаждения по ГОСТ 20459. 13. Исполнение по способу монтажа во СТ 246. 14. Климатические условия и категория размещения по ГОСТ 15150 и 15543. 15. Форма выступающего конца вала. 16. Способ соединения с приводным механизмом (для двигателей) или с приводным двигателем (для генераторов).
Кроме того, дополнительно используют данные о высоте оси вращения по ГОСТ 13267, установочно-присоединительных размерах по ГОСТ 18709 или 20839. Содержание перечисленных предписаний стандартов приведено в § 1-2. Во всем не оговоренном в исходных данных машины должны удовлетворять требованиям ГОСТ 183.
Примеры расчета машин.
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
| U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
| |
| Полезная мощность на валу, кВт |
| Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
| |
| Вращающий момент двигателя, кГм |
| nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
| f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
| |
| Скорость вращения ротора при нагрузке, об/мин |
| |
| ЭДС обмоток статора и ротора, В |
| kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
| Коэффициенты трансформации по напряжению и по току |
| w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
| zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
| Ток холостого хода, А |
| Iном. – номинальный ток двигателя, А |
| Критическое скольжение |
| sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
| Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
| |
| КПД двигателя при введении добавочного сопротивления в ротор |
| |
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
| U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателяПоделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Синхронный двигатель
Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток . Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС
. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС  и
и  .
.
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.

Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6). В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что=0).
Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности .
.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок  , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
.
Механический момент на валу двигателя ,
,
(4.5)
где  — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что , конец вектора токаскользит по прямой cd.
, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), = , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения , , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
U – образные характеристики. Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia(определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia(определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Проектирование синхронной машины с постоянными магнитами, страница 8
— устранить паразитный воздушный зазор между магнитопроводом и обмоткой;
— исключить возможность повреждения обмотки при протаскивании;
— исключить магнитную ассимметрию магнитопровода относительно постоянного магнита.
Улучшение технологии происходит за счет ухудшения магнитных характеристик магнитопровода.
1.3 Получить навыки про проектированию синхронной машины с постоянными магнитами. Ознакомиться с существующими методиками. Разработать техническое задание одной из них.
Существует множество методик по расчету синхронных машин с постоянными магнитами. Главным недостатком является получение только приближенных результатов, потому что процессы преобразования энергии в данном виде машин сложен и мало изучен.
Техническое задание на проектирование:
Синхронный двигатель с постоянными магнитами:
Номинальная
мощность, кВт —  ;
;
Номинальное
фазное напряжение, В –  ;
;
Частота
вращения, об/мин —  ;
;
Коэффициент
мощности, о.е. —  ;
;
Коэффициент
полезного действия, % —  ;
;
Количество
фаз —  .
.
Расчет:
Определение главных размеров и выбор электромагнитных нагрузок.
К главным размерам электрической машины относятся диаметр расточки статора и расчетная длина воздушного зазора.
Электромагнитный момент синхронного двигателя, Н/м
 ,
,
где  — номинальная мощность, Вт;
— номинальная мощность, Вт;  — номинальная частота вращения, об/мин;
— номинальная частота вращения, об/мин;  — коэффициент полезного действия, о.е;
— коэффициент полезного действия, о.е;  — коэффициент мощности;
— коэффициент мощности;  — коэффициент учитывающий разницу между
ЭДС и напряжением.
— коэффициент учитывающий разницу между
ЭДС и напряжением.
Расчетная длина воздушного зазора, м
 ,
,
где  — расчетный коэффициент полюсного
перекрытия;
— расчетный коэффициент полюсного
перекрытия;  — линейная нагрузка, А/м;
— линейная нагрузка, А/м;  — индукция в воздушном зазоре, Тл;
— индукция в воздушном зазоре, Тл;  — диаметр расточки статора, м
— диаметр расточки статора, м
 — остаточная индукция, Тл.
— остаточная индукция, Тл.
Для своей
машины я выбрал магниты с  Тл и
Тл и  А/м.
А/м.
Полюсное деление, м
Магнитный рабочий поток (предварительно), Вб

Ток фазы, А

Зубцовый шаг на статоре, м
 ,
,
где  — количество пазов на статоре (выбирается
по рекомендации).
— количество пазов на статоре (выбирается
по рекомендации).
Расчет геометрии статора.
Выбираем для данного вида машины трапецеидальные пазы полузакрытые.
ЭДС холостого хода, В
 ,
,
где  — фазное напряжение, В;
— фазное напряжение, В;  .
.
Магнитный поток, соответствующий ЭДС в режиме нагрузки, Вб

Предварительное число витков
 ,
,
где  — коэффициент формы поля;
— коэффициент формы поля;  — обмоточный коэффициент;
— обмоточный коэффициент;  — частота питающей сети, Гц.
— частота питающей сети, Гц.
Число витков обмотки катушки
Выбор
плотности тока, 

Сечение эффективного проводника, мм2

где а – число параллельных ветвей обмотки, nэл – число элементарных проводников в одном эффективном.
Ширина зубца статора, м

Площадь паза, м2

где кз – коэффициент заполнения паза медью; Wк – количество витков в катушке обмотки.
Ширина паза в нижней части, м
Я выбрал трапецеидальные пазы.

где bщ1 – ширина открытия паза, м; hщ1 – высота открытия паза, м.
Ширина паза верхней части, м
где bс – припуск на расшлихтовку, м.
Высота паза в штампе, м

где hс – припуск на расшлихтовку, м.
Высота клиновой части паза, м
Полная высота паза, м

Площадь паза под обмотку в свету, м

Уточненный коэффициент заполнения паза

Высота ярма обода статора, м

Внешний диаметр сердечника ротора, м

Выбор воздушного зазора и расчет геометрии ротора.
Величина воздушного зазора, м

Диаметр ротора, м

Ширина магнита, м

Длина магнита, м
Высота магнита, м

Высота ярма обода ротора, м

Минимальное расстояние между магнитами, м

Внутренний диаметр обода ротора, м

Расчет проводимостей рассеяния ротора (магнитов)
Проводимость рассеяния фиктивного электромагнита, сердечник которого имеет ту же конфигурацию, что и постоянный магнит, Вб/А
где 
Коэффициент, учитывающий снижение потоков рассеяния из-за малой проницаемости магнитов и неравномерного распределения н.с. по высоте магнита
 ,
,
где 
Проводимость полюсов (на один полюс), Вб/А

Расчет магнитной цепи.
Расчет магнитной цепи производиться с учетом конструктивного исполнения ротора для нескольких значений ЭДС. Рекомендуемые значения выбираются в зависимости от Е0 , соответствующей индукции магнита в режиме холостого хода

Ширина полюсного наконечника, м

Для ротора с радиальным расположением магнитов без полюсного наконечника, ширина полюсного наконечника, м
Методика расчета асинхронного двигателя.
1. Выбор главных размеров асинхронного электродвигателя.
1.1. Число пар полюсов двигателя.
где
n –
синхронная частота вращения магнитного
поля статора двигателя, об/мин
f
=50 Гц – частота питающего напряжения.
–
синхронная частота вращения магнитного
поля статора двигателя, об/мин
f
=50 Гц – частота питающего напряжения.
1.2. Высота оси вращения (предварительно) h, мм

Рис. 1. Высота оси
вращения h
двигателей серии 4А различной мощности
и частоты вращения:  – со степенью защитыIP
44; б – с IP
23.
– со степенью защитыIP
44; б – с IP
23.
1.3. Наружный диаметр статора по ГОСТ 13267-73
Таблица 1.
h, mm | 112 | 132 | 160 | 180 | 200 | 225 | 250 | 280 | 315 | 355 |
D | 0,191 | 0,225 | 0,272 | 0,313 | 0,349 | 0,392 | 0,437 | 0,530 | 0,590 | 0,660 |
 ,
м
,
м1.4. Внутренний диаметр статора
Таблица 2.
Число пар полюсов | 1 | 2 | 3 |
k | 0.5 | 0.6 | 0.7 |
 =D/D
=D/D
1.5. Полюсное деление
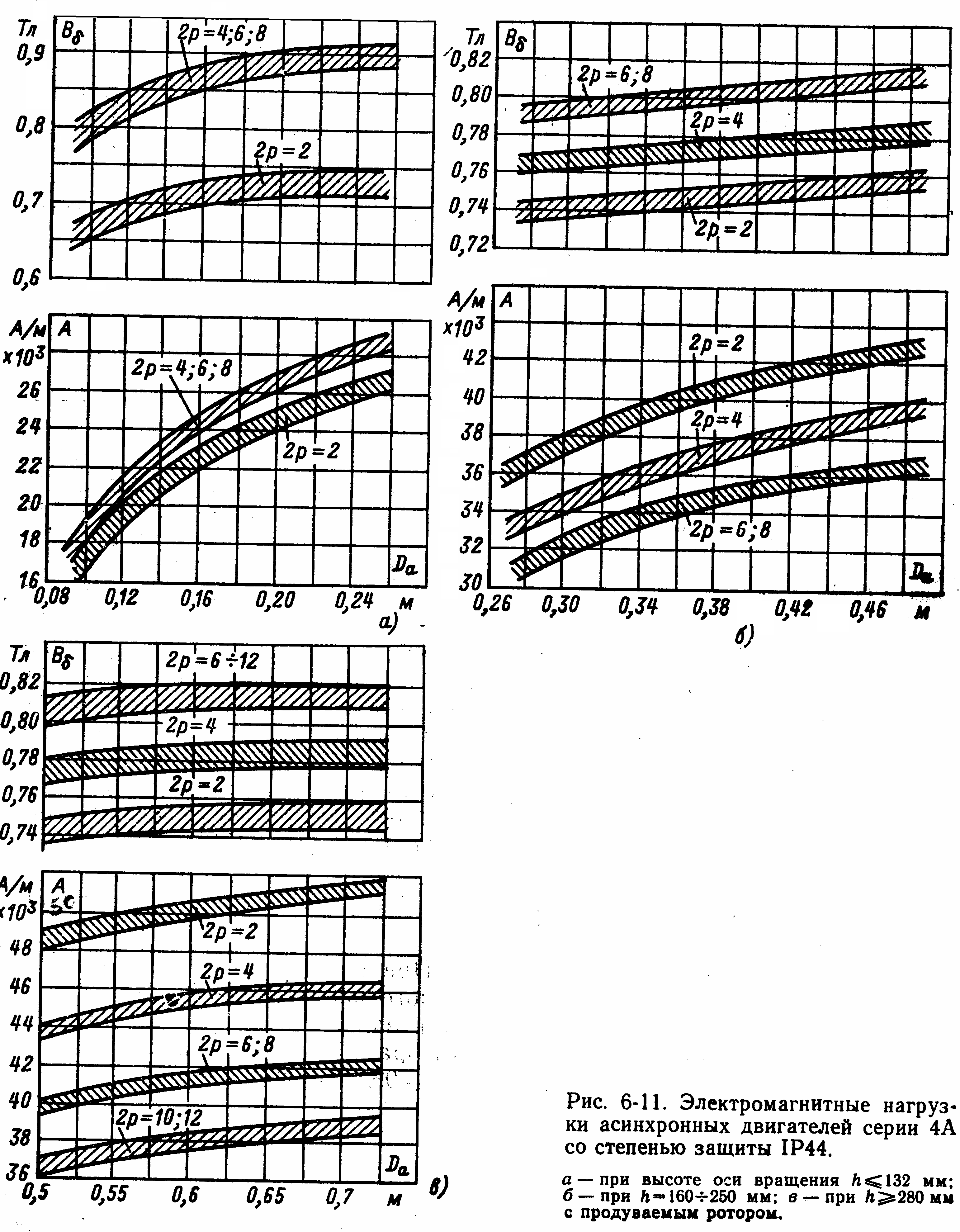
Рисунок 2.
1.6. Расчетная мощность
1.7. Выбираем электромагнитные нагрузки А и В по диаметру Dа для степени защиты IР44(закрытое обдуваемое) согласно рисунка 2.
1.8. Расчетная длина воздушного зазора
где 
 –коэффициент
формы кривой индукции при синусоидальном
распределении индукции
–коэффициент
формы кривой индукции при синусоидальном
распределении индукции
 –обмоточный
коэффициент для основной гармонической
магнитного поля, обычно
–обмоточный
коэффициент для основной гармонической
магнитного поля, обычно  =0,92÷0,96
=0,92÷0,96
1.9. Определяем отношение
сравниваем с рекомендуемыми значениями на рисунке 3.

Рис. 3.:  – со степенью защитыIP
44; б – с IP
23.
– со степенью защитыIP
44; б – с IP
23.
Если λ выше рекомендуемого, то высоту оси вращения двигателя выбираем следующую из стандартного ряда таблицы 2. Повторяем расчеты п. 1.3-1.9.
2. Определение числа зубцов сердечника статора, числа витков и сечение провода обмотки статора.
2.1. Выбираем зубцовое деление статора по рисунку 4.

Рис. 4. Зубцовое деление статора асинхронных двигателей со всыпной обмоткой:
1 – при h  90 мм
90 мм
2 – при h= 90 250
мм
250
мм
3 – при h 280 мм
280 мм
2.2. Число пазов статора
Число пазов статора в любой обмотке АД должно быть кратно числу фаз m.
Выбор
окончательного числа пазов проводят
с четкой увязкой получаемого при этом
q,  (см.
таблицу3).
(см.
таблицу3).
Таблица 3.
Число пар полюсов | Число пазов статора | Число пазов ротора |
1 | 24 | 19, 32. |
30 | 22, 38. | |
36 | 26, 28, 44, 46. | |
42 | 32, 33, 34, 50, 52. | |
48 | 38, 40, 56, 58. | |
2 | 24 | 17, 32. |
36 | 26, 44, 46. | |
42 | 52, 54. | |
48 | 34, 38, 56, 58, 62, 64. | |
60 | 50, 52, 68, 70, 74. | |
72 | 62, 64, 80, 82, 86. | |
3 | 36 | 26, 46. |
54 | 44, 64, 66, 68. | |
72 | 56, 58, 62, 82, 84, 86, 88. | |
90 | 74, 76, 78, 80, 100, 102, 104. | |
4 | 48 | 36, 44, 62, 64. |
72 | 56, 58, 86, 88, 90. | |
84 | 66, 70, 98, 100, 102, 104. | |
96 | 78, 82, 110, 112, 114. | |
5 | 60 | 44, 46, 74, 76. |
90 | 68, 74, 104, 108, 112. | |
120 | 86, 92, 96, 102, 106, 136, 140, 144. | |
6 | 72 | 56, 64, 80, 88. |
90 | 68, 74, 88, 98, 106, 108, 110. | |
108 | 86, 92, 100, 116, 124, 130, 132. | |
144 | 124, 136, 152, 160, 164, 168, 172. |
2.3. Число пазов на полюс и фазу должно быть целым для большинства АД.
где m – число фаз;
2.4. Уточняем зубцовое деление
Окончательное значение t1 не должно выходить за пределы, указанные в таблице 6.
2.5. Число эффективных проводников в пазу .
где а – число
параллельных ветвей обмотки; принимают
таким, чтобы  было целым, а в
двухслойной обмотке кратным двум.
было целым, а в
двухслойной обмотке кратным двум.
Чтобы округление
не было слишком грубым, вначале определяют
предваритель-ное число эффективных
проводников в пазу U , при условии, что а=1.
, при условии, что а=1.
где А – линейная нагрузка, принятая ранее, А/м D – внутренний диаметр статора, м I1н – номинальный ток обмоток статора, А
Полученное значения U не округляется до целого, а находят
такое число параллельных ветвей обмотки,
чтобы число эффективных проводников
в пазу удовлетворяло условиям, о которых
говорилось раньше.
не округляется до целого, а находят
такое число параллельных ветвей обмотки,
чтобы число эффективных проводников
в пазу удовлетворяло условиям, о которых
говорилось раньше.
2.6. Число витков фазы обмотки.
2.7. Линейная нагрузка.
2.8. Индукция в воздушном зазоре.
Если
полученное значение B выходит
за пределы рисунка 1 более чем на 5%, то выбирается
другое значение Uп(см. пункт 2.5)
выходит
за пределы рисунка 1 более чем на 5%, то выбирается
другое значение Uп(см. пункт 2.5)
2.9. Проверить чтобы
А и В находились в допустимых пределах
согласно рисунка 1.
находились в допустимых пределах
согласно рисунка 1.
2.10. Плотность тока в обмотке статора (предварительно)
(Aj )
выбираем по рис. 6-16 (б и в), стр. 173, Копылов,
Проектирование
)
выбираем по рис. 6-16 (б и в), стр. 173, Копылов,
Проектирование
В
данном методическом пособии (Aj )
приведены на рисунке 5.
)
приведены на рисунке 5.
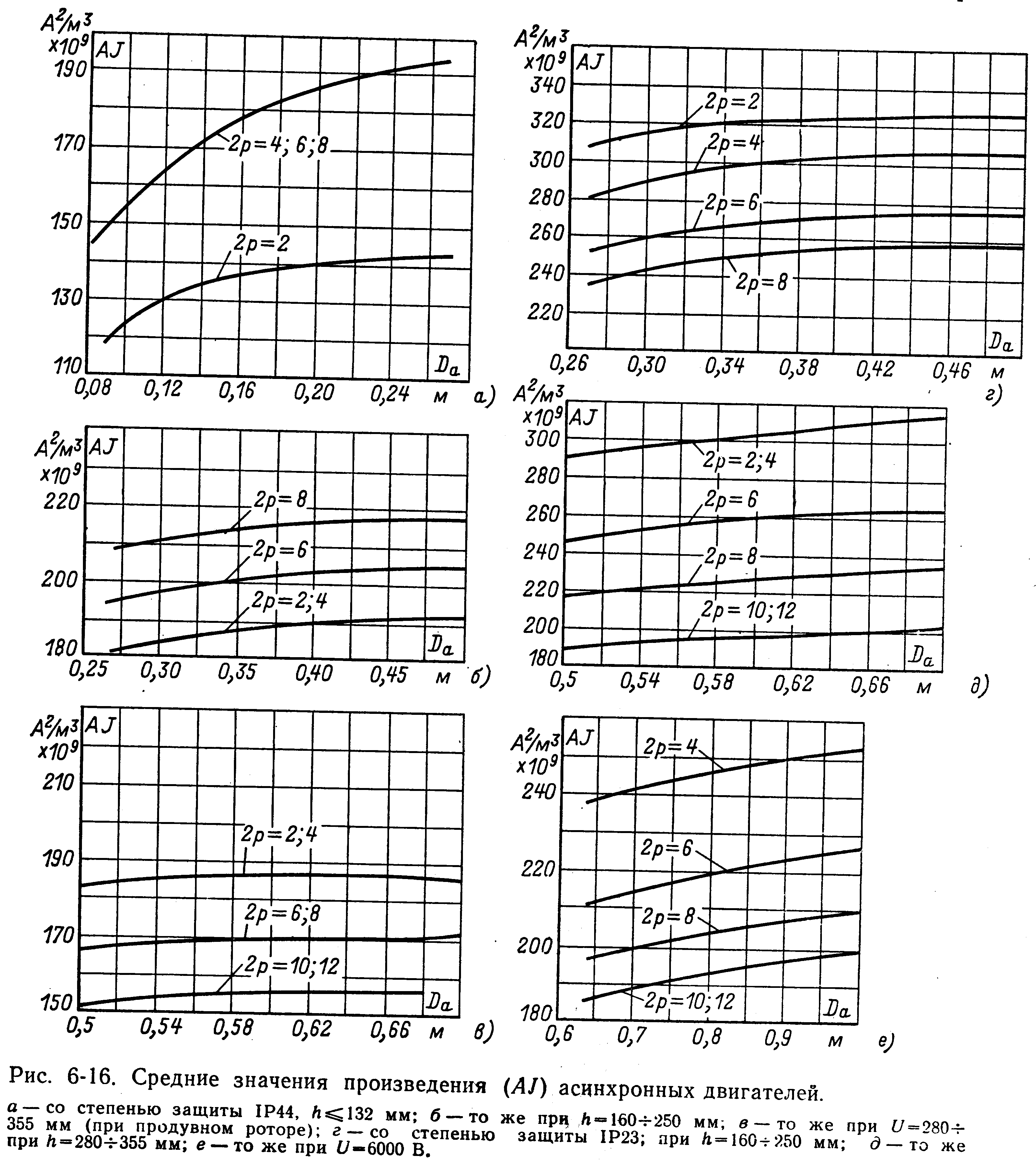
Рисунок 5.
2.11. Сечение эффективного проводника (предварительно) определяют,
исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке
где I1н, номинальный ток обмотки статора (см. пункт 2.5)
2.12. Исходя их эффективного сечения проводника по таблице №4 определяем обмоточный провод с сечением qэл.
n –
кол-во элементарных проводников,
подбирается такое, чтобы суммарная
площадь сечения была близка к расчетному
сечению эффективного проводника;
–
кол-во элементарных проводников,
подбирается такое, чтобы суммарная
площадь сечения была близка к расчетному
сечению эффективного проводника;
q – сечение элементарного проводника
подбирается по конкретной марке провода.
– сечение элементарного проводника
подбирается по конкретной марке провода.
2.13. Плотность тока в обмотке статора (окончательно)
Расчет синхронных двигателей с шихтованными полюсами. Расчет параметров и характеристик синхронных двигателей с массивным гладким ротором
ЛАБОРАТОРНАЯ РАБОТА № 1
РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК АСИНХРОННЫХ ДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Объект исследования и цель работы
Объектом исследования в настоящей лабораторной работе являются асинхронные двигатели с короткозамкнутым ротором (АДК).
Цель работы: изучение методов расчета параметров схемы замещения, параметров режима и пусковых характеристик АДК; исследование этих параметров для реальных АДК; закрепление навыков работы на ПЭВМ при расчетах по готовой программе.
Общая характеристика АДК
АДК, благодаря своей простоте и надежности, являются наиболее распространенным промышленным потребителем электрической энергии. АДК подключаются к системе электроснабжения (СЭС) и используется в качестве привода промышленных механизмов.
Основными параметрами режима АДК являются: активная Р и реактивная Q мощности, потребляемые АДК из электрической сети, ток статорной обмотки I1, электромагнитный момент на валу АДК Мэ в установившемся режиме, равный моменту сопротивления механизма Ммех, частота вращения ротора АДК w, скольжение ротора АДК, равное
 (1)
(1)
где wс — синхронная частота вращения ротора АДК.
Схема замещения АДК представлена на рис.1. Параметрами схемы замещения являются R1, Xs1 — активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки; R2, Xs2 — активное сопротивление и индуктивное сопротивление рассеяния обмотки ротора, приведенные к статорной обмотке; X12— индуктивное сопротивление взаимоиндукции между обмотками статора и ротора.
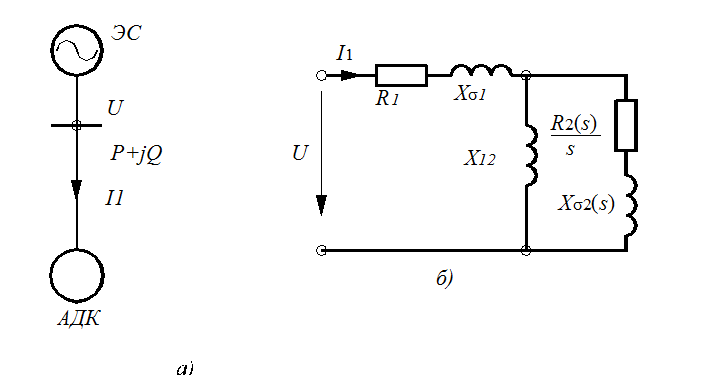
Рис.1. Схема подключения (а) и схема замещения (б) АДК
В схеме замещения АДК необходимо учитывать поверхностный эффект, т.е. вытеснение тока в обмотке ротора. Степень вытеснения тока определяется частотой наводимых в роторе токов, которая определяется скольжением двигателя.
Изменение сопротивлений эквивалентного обмотки ротора в схеме замещения за счет вытеснения тока хорошо описывается следующими зависимостями:
 (2)
(2)
 (3)
(3)
где R2п, Xs2п, R2c, Xs2с — активные и индуктивные сопротивления рассеяния обмотки ротора соответственно при пуске (s=1) и в синхронном режиме (s=0).
АДК характеризуется следующими каталожными данными:
Pн — номинальная мощность на валу двигателя, кВт;
Uн — номинальное напряжение, кВ;
cosjн — номинальный коэффициент мощности;
hн — номинальный коэффициент полезного действия, % ;
wн, wс — номинальная и синхронная частота вращения, об/мин;
Mп — кратность пускового (при s=1) момента;
Мм — кратность максимального момента;
Iп — кратность пускового тока.
Параметры схемы замещения и режима АДК удобно выражать в относительных единицах при следующих базисных условиях:
Sб=Sн — номинальная полная мощность АДК;
Uб=Uн — номинальное напряжение статорной обмотки АДК;
Mэ — электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента.
Основные параметрами режима АДК могут быть определены через параметры схемы замещения и скольжение по следующим выражениям:
 (4)
(4)
где  — сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
— сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
 (5)
(5)
Sн— номинальная полная мощность АДК, равная
 (6)
(6)
Зависимости от скольжения P(s), Q(s), I(s), M(s) при номинальном напряжении на выводах двигателя называются пусковыми характеристиками АДК.
Основными расчетными параметрами АДК также являются:
синхронное индуктивное сопротивление АДК
Xc= Xs1+X12 (7)
сверхпереходное индуктивное сопротивление АДК
 (8)
(8)
электромагнитная постоянная времени обмотки ротора при короткозамкнутой статорной обмотке
 (9)
(9)
где X2’ — индуктивное сопротивление обмотки ротора при короткозамкнутой статорной обмотке
 (10)
(10)
Расчетные параметры АДК X” и Т2’ зависят от скольжения в связи с вытеснением тока в обмотке ротора.
Алгоритм расчета параметров схемы замещения АДК
Параметрами схемы замещения являются следующие параметры: R1, R2п , R2c, Xs1, X12, Xs2п, Xs2с. Их необходимо определить через каталожные данные АДК. Активное сопротивление статорной обмотки можно определить, исходя из потерь мощности в этой обмотке в номинальном режиме. В относительных единицах R1=DPст.
Для АДК потери в статорной обмотке составляют относительно устойчивую долю (в среднем 0.3) от общих потерь активной мощности в номинальном режиме, поэтому